1. Introduction
Sea ice plays an important role in both surface atmosphere heat exchange and oceanic thermohaline circulation. Since 1979, the spatial extent of Antarctic sea ice has been observed by satellite-based passive microwave remote sensing with the maximum sea ice extent recorded during 2012–2014 [
1]. Importantly, the minimum sea ice extent was recorded in 2016 [
2]. In contrast to the areal extent, the spatial and temporal distributions of sea ice thickness in the Antarctic remain largely unknown [
3]. The quantification of sea ice thickness is of crucial importance, as when combined with data on the areal extent, this information enables the computation of sea ice volume. Knowledge about sea ice volume can provide insight into both the heat budget of the Antarctic sea ice system and the quantification of fresh water and saltwater fluxes into the Southern Ocean.
Satellite-based remote sensing techniques, such as satellite altimeters, have been developed in recent years to collect long-term extensive datasets of distributions of sea ice thickness. Altimetric observation of sea ice thickness is based on freeboard measurements, that is, the height of an ice floe above the sea surface, which can be used to calculate ice thickness values [
4]. Data about the sea ice, snow, and sea water density are required for sea ice thickness estimation by satellite altimeter measurements. A current satellite altimeter, Cryosat-2 (CS-2), was launched in April 2010 by the European Space Agency (ESA), and CS-2 data of the freeboard and sea ice thickness in the Arctic region have been made available to the public by the Alfred Wegener Institute. Additionally, the verification of freeboard estimation is being carried out in the Southern Ocean [
5]. However, estimation methods of sea ice thickness have not yet been established. This is because, as mentioned above, information about sea ice density is essential for altimetric sea ice thickness estimation. Sea ice density changes between first-year (FY) ice and multi-year (MY) ice, as the volume of brine contained in sea ice changes over time. Therefore, it is necessary to establish a sea ice classification method for ice thickness estimation using an altimeter.
The Antarctic sea ice zone is composed of a complex mixture of ice of different types with variable thickness, the surface of which is generally covered by snow with variable thickness. Each austral autumn, drift ice covers the Southern Ocean’s seasonal ice zone away from the coastal regions, while fast ice forms around much of the Antarctic continent. At a maximum, fast ice can account for as much as 14% (by area) of East Antarctic sea ice [
6]. As fast ice is typically fixed along the continent, this makes it an ideal target for studies of ocean ice atmosphere interaction with a focus on thermodynamic processes [
7]. Moreover, the presence of drift ice and fast ice in coastal areas is also important for understanding the causes of ice shelf collapse, with the aim of improving models of the Antarctic ice sheet and predicting the future behaviors of these ice sheets and their related contributions to sea level rise [
8].
Various studies have been conducted to classify ice types using satellite remote sensing. For example, Tamura et al. [
9] developed an algorithm to classify drift ice, fast ice (including glacier tongues, grounded icebergs, and ice shelves), and continental ice using a satellite passive microwave radiometer, namely the Special Sensor Microwave Imager (SSM/I). Aulicino et al. [
10] developed an algorithm for the classification of sea ice types using satellite passive microwave radiometer data (collecting using the Advanced Microwave Scanning Radiometer for the Earth Observing System (AMSR-E) instrument) collected during the winter season. A method for classifying ice types in the Antarctic Ocean in winter was developed using the backscattering coefficient measured by the satellite-based scatterometer on European Remote Sensing Satellite 1 (ERS-1) [
11]. Satellite scatterometers are primarily designed to provide a global ocean wind vector data. The characteristics and melting processes of the Antarctic sea ice surface of MY ice have been investigated using satellite scatterometer data obtained by ERS-1/-2 [
12]. A sea ice detection algorithm was developed using an advanced scatterometer (ASCAT) with Bayesian estimation [
13]. Additionally, a method using the backscattering coefficient measured by ASCAT and a passive microwave radiometer (Special Sensor Microwave Imager Sounder (SSMIS)) has also been developed and published as a product for use in the Arctic [
14]. Although methods for classifying ice around the continent have been developed, no algorithms have yet been developed for both the Arctic and Antarctic that can accurately distinguish between FY ice, MY ice, ice shelves, and ice sheets at the same time.
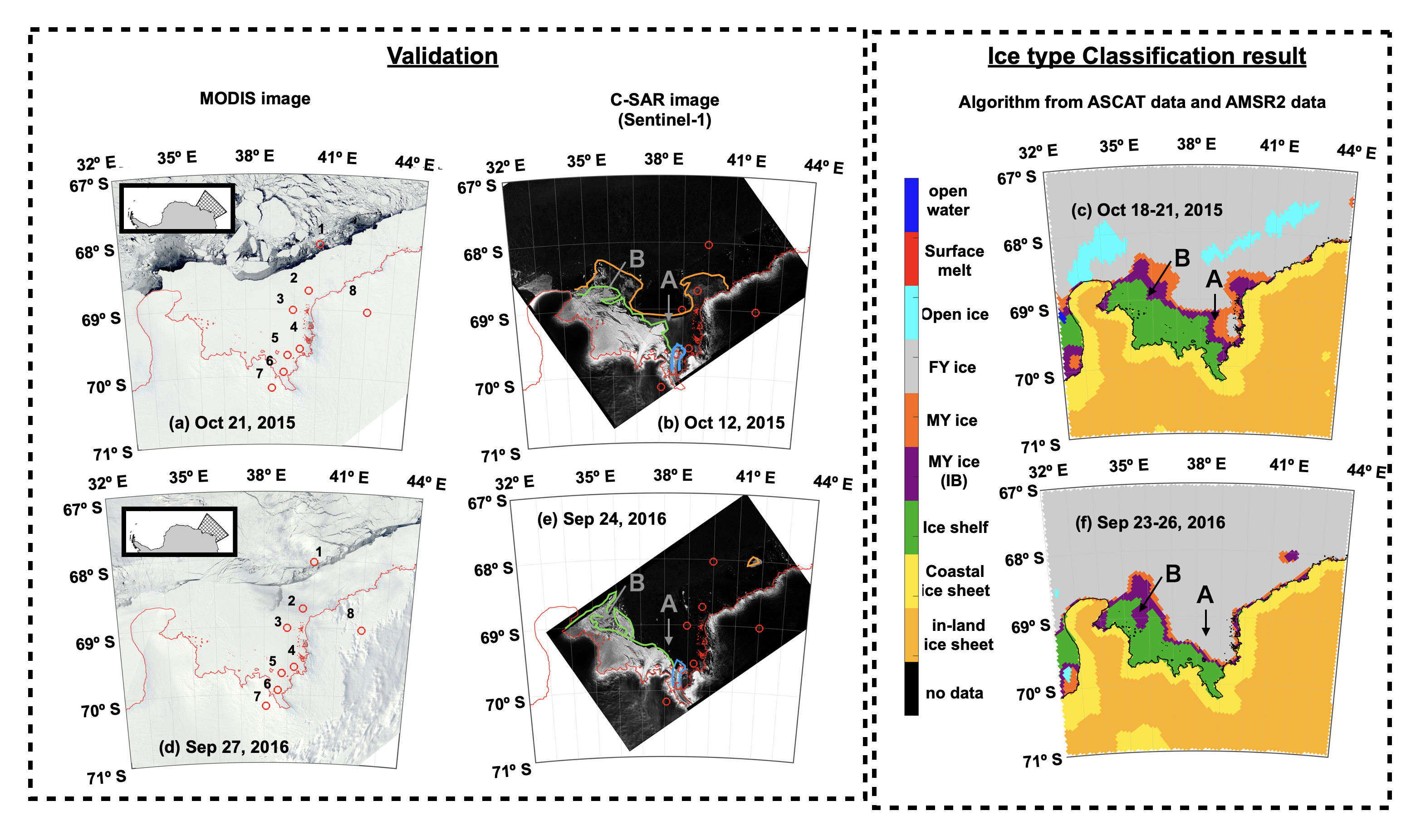
Figure 1a shows a map of eastern Antarctica, and the area marked in a grid pattern corresponds to the area in
Figure 1b. In the current study, an ice classification algorithm was constructed for use with data from Lützow-Holm Bay (LHB), located at approximately 69° S, 38° E, located near the eastern of Queen Maud Land (
Figure 1b). The Japanese icebreaker
Shirase, with the Japanese Antarctic Research Expedition (JARE), sets out for the Syowa Station at approximately the same time every year. Visual observation and sea ice observation using a measuring instrument is carried out along the track of the ship [
15]. The compositions of ice around LHB are described below. Most of the area is covered with fast ice, and drift ice is located north of 68.5° S. A flaw polynya called “
Otone-Suiro” frequently appears at the boundary between the drift ice and the fast ice. Here, a flaw polynya refers to the narrow separation zone between drift ice and fast ice that forms when drift ice shears under the effects of a strong wind or current along the fast ice boundary [
16]. The ice composition includes an ice shelf, the
Shirase Glacier (SG), and ice sheets bordering the coastline. Usually, the fast ice tends to form along the edge of the continental ice shelf. However, the passage of atmospheric low-pressure systems can trigger the breakup of fast ice [
17]. Moreover, Aoki [
18] investigated the relationship between ice breakup latitude and various variables, revealing that the breakup latitude in April had a persistently high correlation with the sea surface temperature (SST) in the tropical Pacific Ocean. In the current study, we focused on the large-scale breakups of ice in LHB, attempting to clarify the underlying mechanisms, as described above. Fast ice breakups may replace MY ice with FY ice. In the current study, we compared these two types of ice before and after breakup.
This paper presents an ice classification algorithm based on combined microwave radiometer and scatterometer data from LHB, as well as the results of verification tests of this algorithm. Briefly, the algorithm considers the annual variation of the normalized radar cross section (
σ0) of each ice type in LHB measured by ASCAT with threshold values for the ice classification scheme identified on the basis of simple supervised clustering analysis [
11]. To verify the validity of the classification, the results are compared with ship-based visual observations and satellite images. The remainder of the paper is structured as follows.
Section 2 describes the data and data sources used in this study.
Section 3 describes the annual tendency of satellite data and the classification workflow.
Section 4 presents the results of the ice classification and discusses the reliability of the proposed algorithm.
Section 5 discusses changes in the considered ice areas before and after a large-scale breakup based on the results of the algorithm.
Section 6 presents our conclusions and possibilities for future research.
2. Materials and Methods
A summary of the data types and sources used in this study is presented in
Table 1. In the current study, ice types were classified based on several satellite datasets, and these datasets are described below.
The following data sources were used to develop the algorithm. Normalized radar cross section (σ0) data were derived from the ASCAT instrument. The sea ice concentration (SIC) and brightness temperature (TB) products derived from AMSR2 were used to detect the presence of sea ice and surface melting, respectively. Sentinel-1 grayscale intensity imagery and Moderate Resolution Imaging Spectroradiometer (MODIS) visible imagery were used to verify the validity of the proposed algorithm. In the following subsections, each dataset is described in more detail.
2.1. Advanced Scatterometer (ASCAT)
ASCAT was primarily designed to provide global ocean wind vectors operationally. ASCAT is an active microwave advanced scatterometer mounted onboard the polar-orbiting satellites MetOp-A and MetOp-B, which are operated by the European Organization for the Exploitation of Meteorological Satellites, and these satellites were launched in 2006 and 2012, respectively. The ASCAT instrument can transmit pulses with vertical co-polarization (VV) operating in the C-band at 5.255 GHz. The ASCAT instrument has two sets of three fan-beam antennae that measure the returned backscatter signal at incident angles of 25–65°. The antennae extend to either side of the instrument, resulting in a double swath of observations, each 550 km wide, separated by a gap of approximately 360 km [
19]. The microwave pulses can penetrate clouds and are not dependent on solar illumination, meaning that ASCAT can provide daily “all-condition” surface measurements and imaging covering approximately 80% of the globe [
20]. ASCAT’s standard backscatter product has a nominal spatial resolution of 25 or 50 km with very high temporal resolution (i.e., multiple passes per day). However, to investigate the small-scale ice area considered in this study, we used a scatterometer image reconstruction (SIR) algorithm, specifically a 4.45-km resolution all-passes product that is a composite of several passes over the pole during a day [
21]. This enhanced resolution product was provided by the Brigham Young University Microwave Earth Remote Sensing Laboratory [
22]. All backscattering data were processed using the SIR algorithm [
23], which uses multiple days of scatterometer data to create a grid-like resolution enhancement product. This algorithm assumes a linear model that relates the normalized radar cross section (
σ0) to the signal incident angle (
θ):
The model normalizes the incident angle to 40°. This will create two images, referred to as image A (including normalized backscattering values, in dB) and image B (representing the incident angle dependence of backscattering, in dB/°). In this study, image A of the v-polarization evening pass was utilized.
2.2. Advanced Microwave Scanning Radiometer 2 (AMSR2)
AMSR2 is the passive microwave radiometer instrument mounted onboard the Global Change Observation Mission Water (GCOM-W) satellite, which was launched in May of 2012. The AMSR2 instrument is a conical scanning passive microwave radiometer system that measures in seven frequency bands (in the range of 6.925–89.0 GHz) in both horizontal and vertical polarizations. The antenna’s different feedhorns scan at an incidence angle of 55° and provide a 1450 km swath of coverage at the Earth’s surface. Here, we used descending passes to find TB values for each frequency and polarization. Additionally, SIC values are provided as 10-km gridded data on a polar stereographic projection from the Japan Aerospace Exploration Agency (JAXA) as the AMSR2 Level 3 (L3) products.
As the value of
σ0 is sensitive to melting of the snow or ice surface [
20], melting represents a source of error. In the current study, surface melting was detected using the following procedure. Combining
TB values at different frequencies and polarizations enables different stages of melting progression to be distinguished [
24]. The combination of the horizontally polarized
TB at 19 GHz (
TB 19H) and the vertically polarized
TB at 37 GHz (
TB 37V) is the most sensitive index for detecting surface and subsurface melting. As snowmelt water drains from the upper snow cover to deeper layers, the emissivity of
TB 19H increases and can even exceed the emissivity of
TB 37V.
Therefore, the cross-polarization ratio (
XPR) can be used as an index to determine whether melting has occurred in the surface or in the subsurface layer. Arndt et al. [
25] represented these combinations of
TB 19H and
TB 37V derived from the passive microwave radiometers SSM/I and SSMIS mounted onboard the Defense Meteorological Satellite Program (DMSP) satellites via the
XPR, which is expressed using the following equation:
As the brightness temperature frequencies measured by the AMSR2 sensor were 18 and 36 GHz, the XPR was calculated in this study by replacing TB 19H with TB 18H and TB 37V with TB36V.
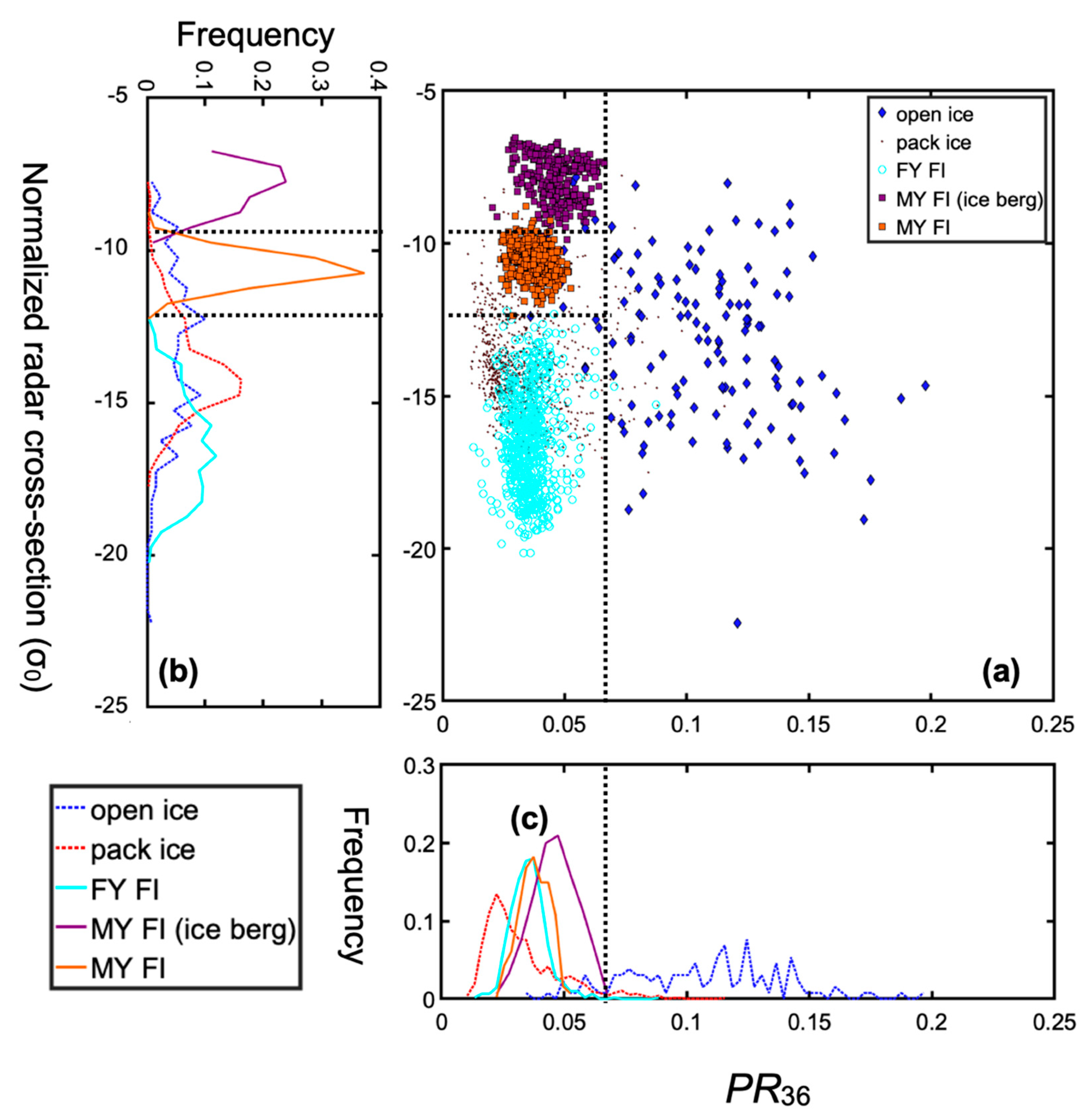
Markus and Burns [
26] developed a polynya estimation model using the polarization ratio (
PR) between 37 and 85 GHz, sensed by SSM/I. Moreover, the frequency of 36 GHz is affected by the open water fraction [
27]. In this study,
PR36, calculated using the following equation was used for identifying drift ice of different concentrations.
In this study, the PR36 and XPR values were calculated using TB 18H, TB 36V, and TB 36H of the AMSR2 L3 product.
2.3. MODIS Imagery
The MODIS instruments onboard the Terra and Aqua spacecraft provide a wealth of spectral and spatial information about the Earth. One of the most aesthetically pleasing MODIS products is the true color images (also known as natural color images) of the Earth at a 250-m spatial resolution. MODIS is the first orbiting imaging sensor to provide such images at a reasonably high spatial resolution over a wide swathe. In the current study, we used MODIS-corrected reflectance true color GeoTIFF imagery to validate the classification results. The MODIS Imagery products were obtained from the NASA’s Earth Observing System Data and Information System (EOSDIS). Additionally, EODIS publishes coastline data via OpenStreetMap. In the current study, coastline data were used to classify areas of land and sea.
2.4. Sentinel-1 Level 1 Product
Sentinel-1 was launched on the 3rd of April 2014, from Kourou Spaceport in French Guiana. Data became operationally available around October of 2014, following a commissioning phase. The main instrument of Sentinel-1 is a C-band synesthetic aperture radar (C-SAR) instrument, which provides data in the form of SAR images with various modes and resolutions. Hereafter, C-band SAR images are referred to as C-SAR images for simplicity. For operational large-scale ice areas, we used the ground range detected extended wide swath mode at a medium resolution (93 × 87 m) corresponding to an equivalent number of looks of 12.7. Data were provided with 40 × 40 m pixel spacing. Sentinel-1 level 1 products were provided by the ESA’s Copernicus Open Access Hub.
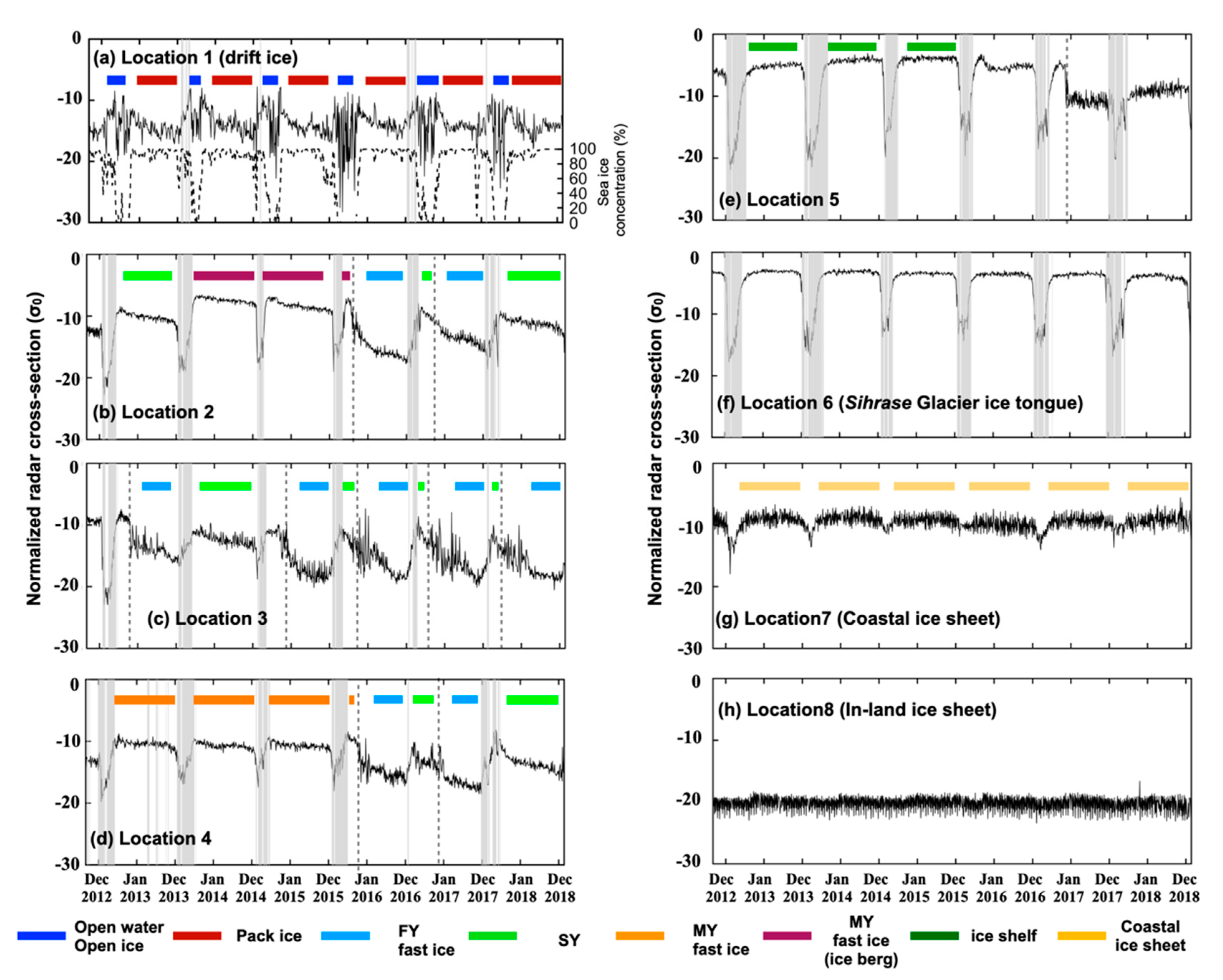
4. Validity Testing of the Ice Classification Scheme
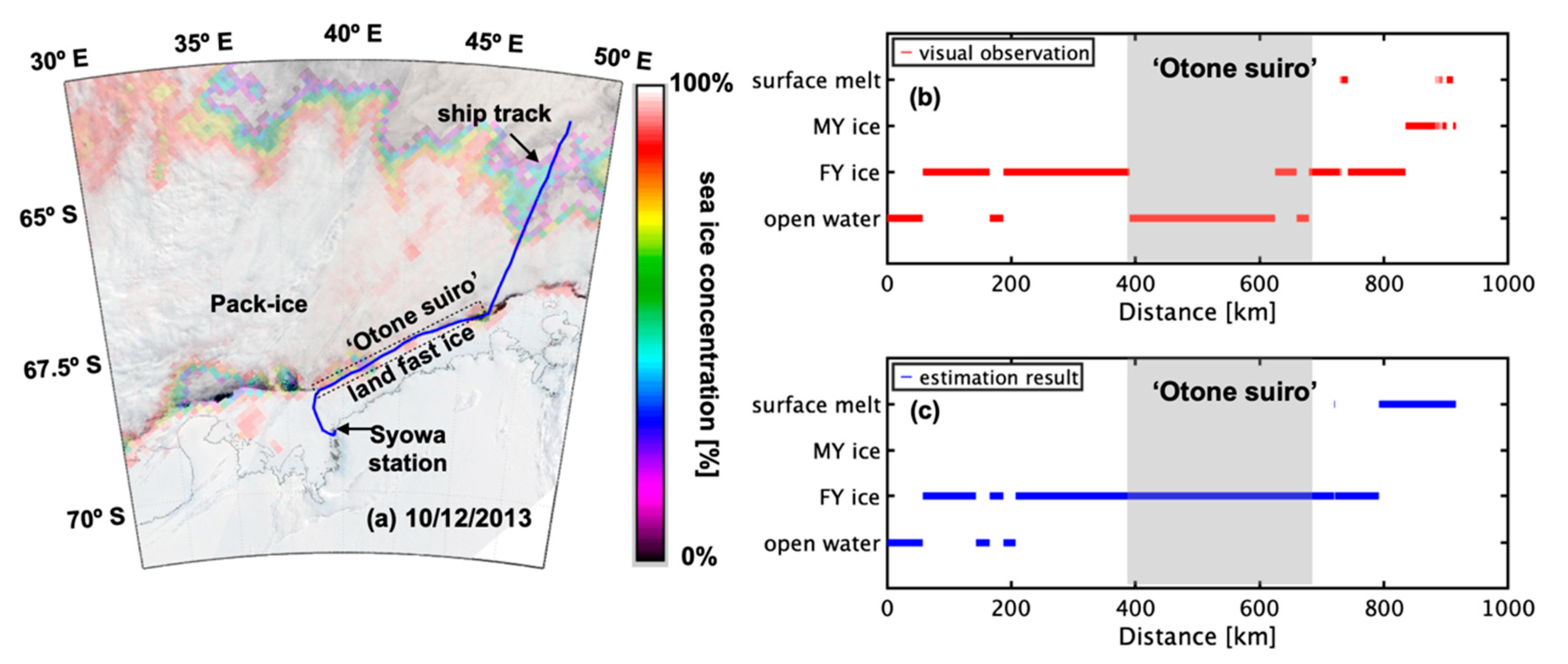
To verify the validity of the ice classification algorithm, the algorithm results were compared with visual observation data obtained from the icebreaker
Shirase from 9 December 2013 to 4 January 2014, as shown in
Figure 6a. Routine visual observations of sea ice and ocean conditions were performed once every hour from the ship’s bridge. Visual observations included the thickness of snow and ice, the sea ice concentration, and the presence of surface melting.
Figure 6b,c shows a comparison of the results of ice classification using visual observation and satellite data. It is assumed that the results of each observation represent the sea ice and ocean conditions of the region in which the
Shirase sailed within each hour. The results were consistent with the observations up to a measurement distance of 400 km. After 400 km, there was a difference between the visual observation data and the classification results of this study. The range between 400 and 600 km was classified as open water by visual observation, whereas the classification algorithm classified it as FY ice. From the track shown in
Figure 6a, the ship sailed in a flaw polynya called “
Otone-suiro”, which is located along a fast ice area south of 67° S. The resolution of the SIC used to determine the open water was 10 km. A typical Antarctic coastal polynya is 0–10 km in width [
30]. Satellite observations can include not only the polynya, but also the ice at its sides, whereas visual observation focuses on a narrow area around the ship. Thus, methodological differences between the algorithm calculations and visual observations may have caused the difference in results.
The range between 800 and 850 km was classified as FY ice, and that after 850 km was classified as MY ice by visual observation (
Figure 6b). The estimation results did not match the visual observation data after 800 km (
Figure 6c). Visual observation determined melting when paddles (melting ponds) were observed on the surface. However, the melting algorithm detected not only the melting of the snow surfaces, but also the sub-surfaces. This difference in the determination of melting may have caused a discrepancy in the results between the two methods.
Table 2 shows an evaluation of the accuracy of in the proposed ice classification algorithm compared with the visual observation data. For example, the value of 43.3 in the open water row indicates that 43.3 km of the total of 111.8 km that was classified as open water by the algorithm was classified as FY ice by visual observation. The accuracy verification results examined three indices, which are generally used for satellite data verification, and these were calculated with reference to the calculation method of Hori et al. [
31]. Here, producer’s accuracy (PA) indicates the accuracy ratio of the ice classification algorithm against visual observation. For example, 0.61 in the PA column was calculated from 68.5 divided by 111.8. User’s accuracy (UA) indicates the accuracy ratio of visual observation against the proposed ice classification algorithm. For example, 0.77 in the UA accuracy column was calculated from 68.5 divided by 88.9. Overall accuracy (OA) indicates the accuracy ratio of the distance in which the results of the proposed ice classification algorithm agree with those of visual observation against total distance. The values in parentheses are the results including the “
Otone-suiro” polynya. The value of OA was 0.53 when including “
Otone-suiro”, but increased to 0.71 when the polynya was excluded. As mentioned above, the “
Otone-suiro” polynya was too narrow to be treated by the proposed ice classification algorithm. It is reasonable to evaluate this algorithm with observational data excluding “
Otone-Suiro”. Additionally, visual observation can only detect surface melting; however, this ice classification algorithm can detect surface and subsurface melting covering a wide range of melting conditions. Except for the “
Otone-Suiro” polynya and surface melting, the classification results showed a high level of agreement with the visual observation data. Thus, we concluded that the proposed algorithm performed well.
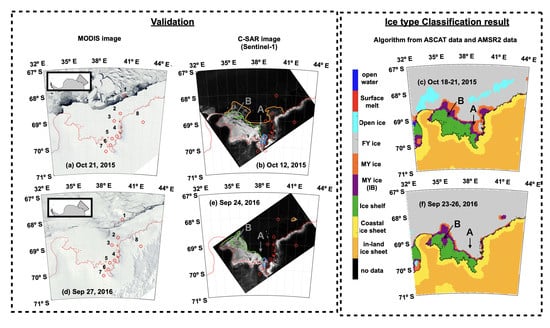
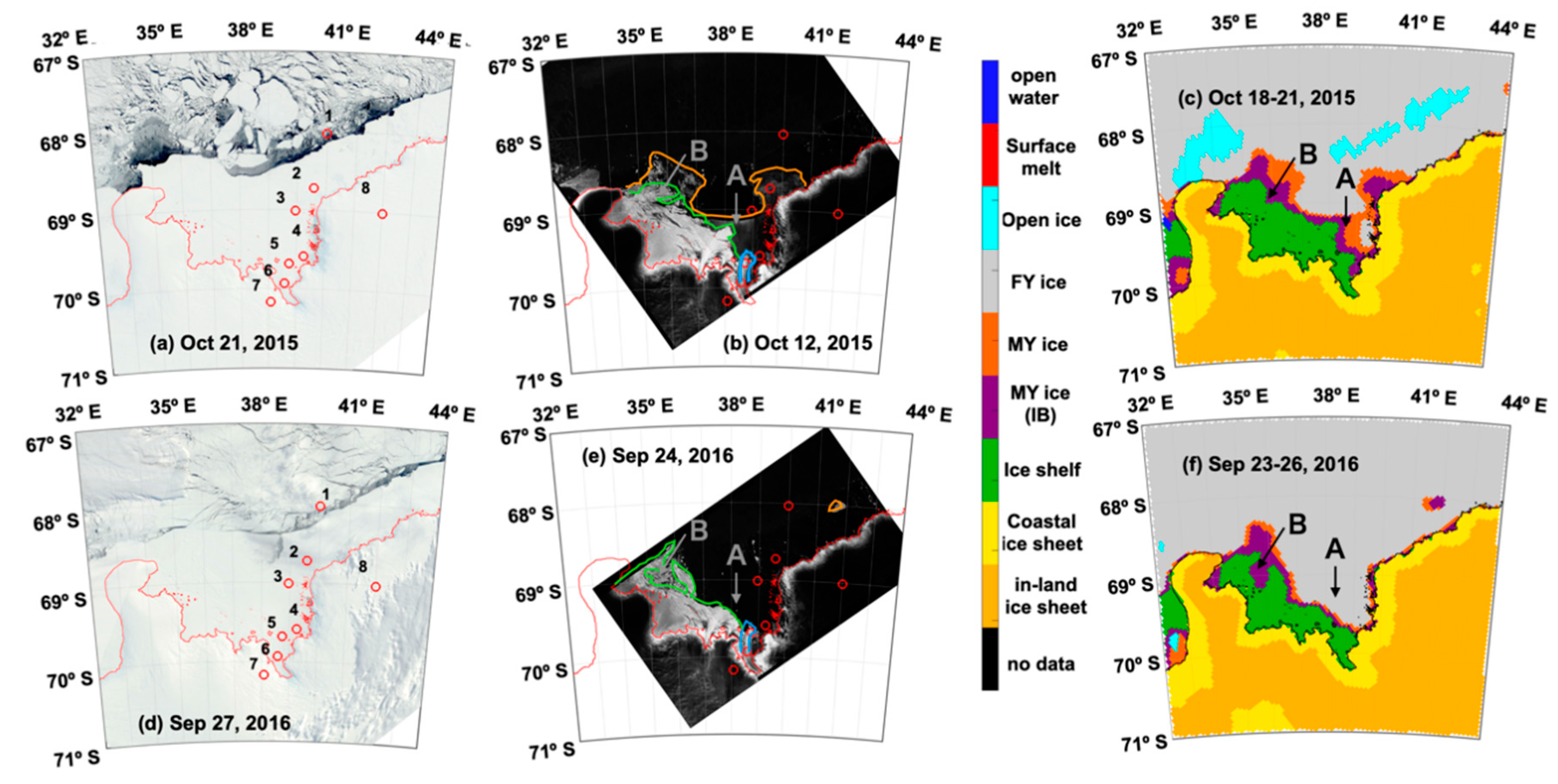
Figure 7a,d shows the MODIS images and
Figure 7b,e shows C-SAR images for October 2015 and 2016, respectively.
Figure 7c,f shows the results of the proposed ice classification algorithm. Here, the C-SAR images have lines on the edges of the ice shelf, MY ice, and the outer part of the ice tongue, respectively. These lines along the edges of different ice types were defined by analyzing the intensity of reflectance derived from the C-SAR images.
Figure 7a–c indicate the season before the large ice breakup, and
Figure 7d–f indicate the season after the large ice breakup. From the MODIS images shown in
Figure 7a,d, it can be seen that drift ice and land fast ice were separated by flaw polynya, whereas ice types including FY ice, MY ice, ice shelf or ice sheets cannot be distinguished in the south of the flaw polynya. However, these ice types, except FY ice, could be classified by the C-SAR images shown in
Figure 7b,e as mentioned above. The ice classification algorithm developed in this study was designed to classify these ice types, which are detected by MODIS and C-SAR, and the results are shown in
Figure 7c,f. From
Figure 7c, open ice at two offshore regions (33–35° E, 68.3–68.8° S and 38–43° E, 67.5–68.5° S) classified by the proposed algorithm corresponded to open water and newly formed ice, which appeared in the MODIS image at the boundary between drift ice and land fast ice, as shown in
Figure 7a. Although the MODIS image shown in
Figure 7d cannot distinguish between ice shelves and MY ice, the results of the ice classification algorithm shown in
Figure 7f are in accordance with the edge of the ice shelf shown in
Figure 7e. Moreover, the MY ice floe at 41.5–42.0° E, 68° S, shown in
Figure 7e, was also confirmed. The C-SAR image shown in
Figure 7b contained a square-shaped projection of ice shelf at the point indicated by A (38° E, 69.5° S) in 2015. This part of the ice shelf at A in 2015 was broken up in 2016. This change in ice shelf can also be confirmed from the classification results by the algorithm (
Figure 7c,f). A MY ice outflow was confirmed around this ice shelf. In the open water, caused by breakup, the area of FY ice grew. This change in ice types was also confirmed by the ice classification algorithm results shown in
Figure 7f. At the point indicated by B (35–37° E, 69° S) the breakup and separation of the ice shelf occurred, and many icebergs appeared. These events were confirmed from the C-SAR images. These ice type changes were also confirmed from the ice classification algorithm shown in
Figure 7f as a change from an ice shelf to MY (IB) ice. The classification results also indicated that MY (IB) ice appeared at the boundary between the MY ice and the ice shelf.
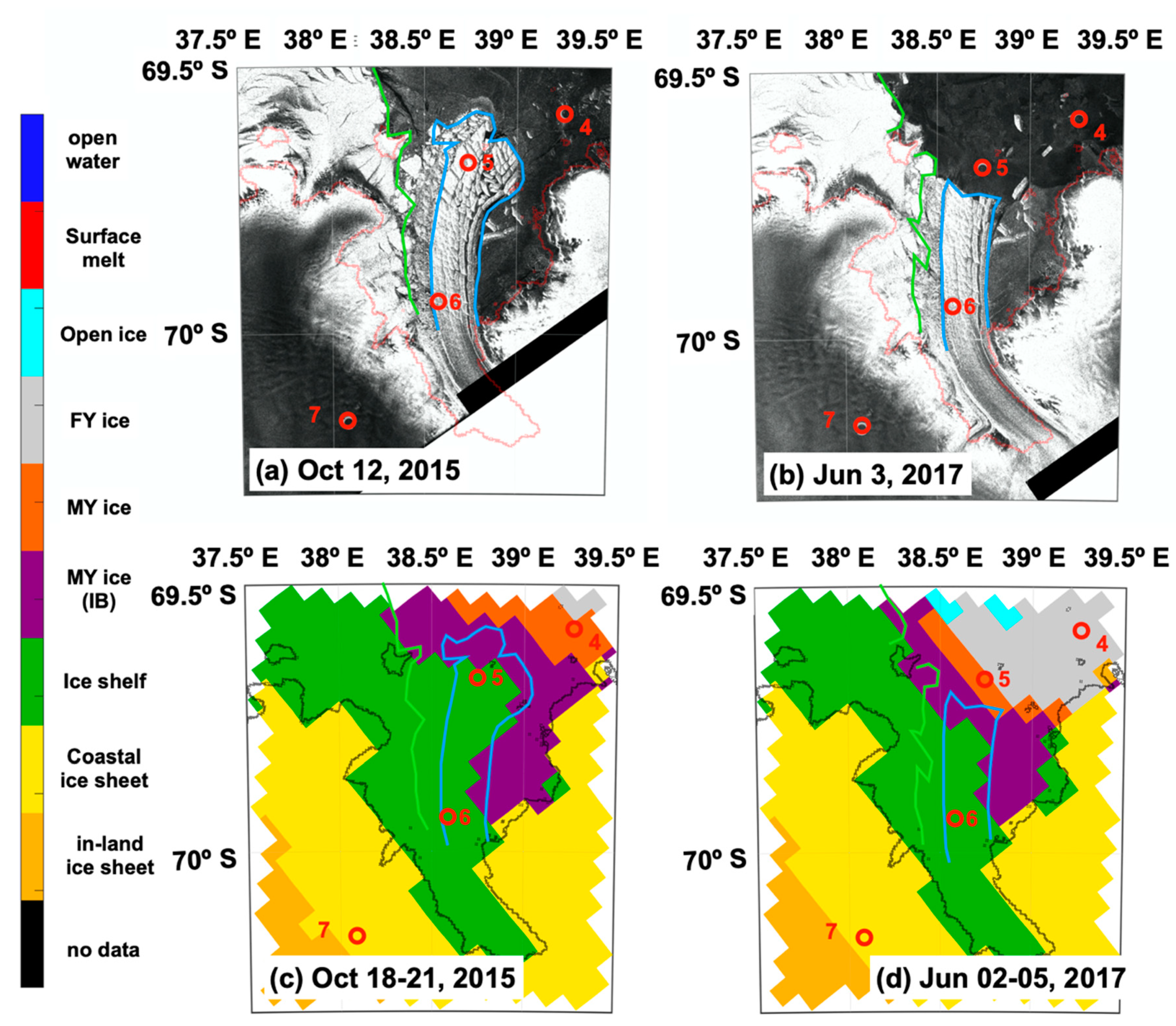
Figure 8 shows the classification results of ice types and an enlarged image of the C-SAR image around the SG ice tongue. Here, the C-SAR images have lines tracing the outline of the ice shelf (green line) and the ice tongue (blue line), respectively. These lines along the edges of different ice types were defined by analyzing the intensity of reflectance derived from the C-SAR images. In 2017, the tip of the SG tongue flowed out as shown in
Figure 8b. According to the classification results shown in
Figure 8c,d, the ice in location 5 was classified as an ice shelf before breakup, while it was classified as a MY ice after breakup. The shape of the SG ice tongue changed after breakup, as shown by blue lines in
Figure 8a,b. The results of the ice classification algorithm shown in
Figure 8c,d show good agreement with these blue lines. The calculation results also show that the ice conditions at sea substantially changed after the breakup. A C-SAR image on 5 May 2017 confirmed that new ice started growing in location 5. Therefore, the ice shown in
Figure 8b, which was only 1 month after the breakup event, appears to be FY ice. However, the algorithm classified the ice as MY ice because the value of σ
0 was within the range of MY fast ice, as shown in
Figure 2e. This discrepancy can be explained as follows. It has been reported that the salinity of the sea surface at the glacier edge is lower due to the presence of fresh water from the bottom of the glacier in Greenland [
32,
33]. Thus, ice formed from low-salinity sea water has lower dielectric loss and a higher σ
0 value than ordinary FY ice. A similar effect of low-salinity water from the tip of the ice tongue was likely to have occurred at location 5.
5. Time Series Change in Ice Area
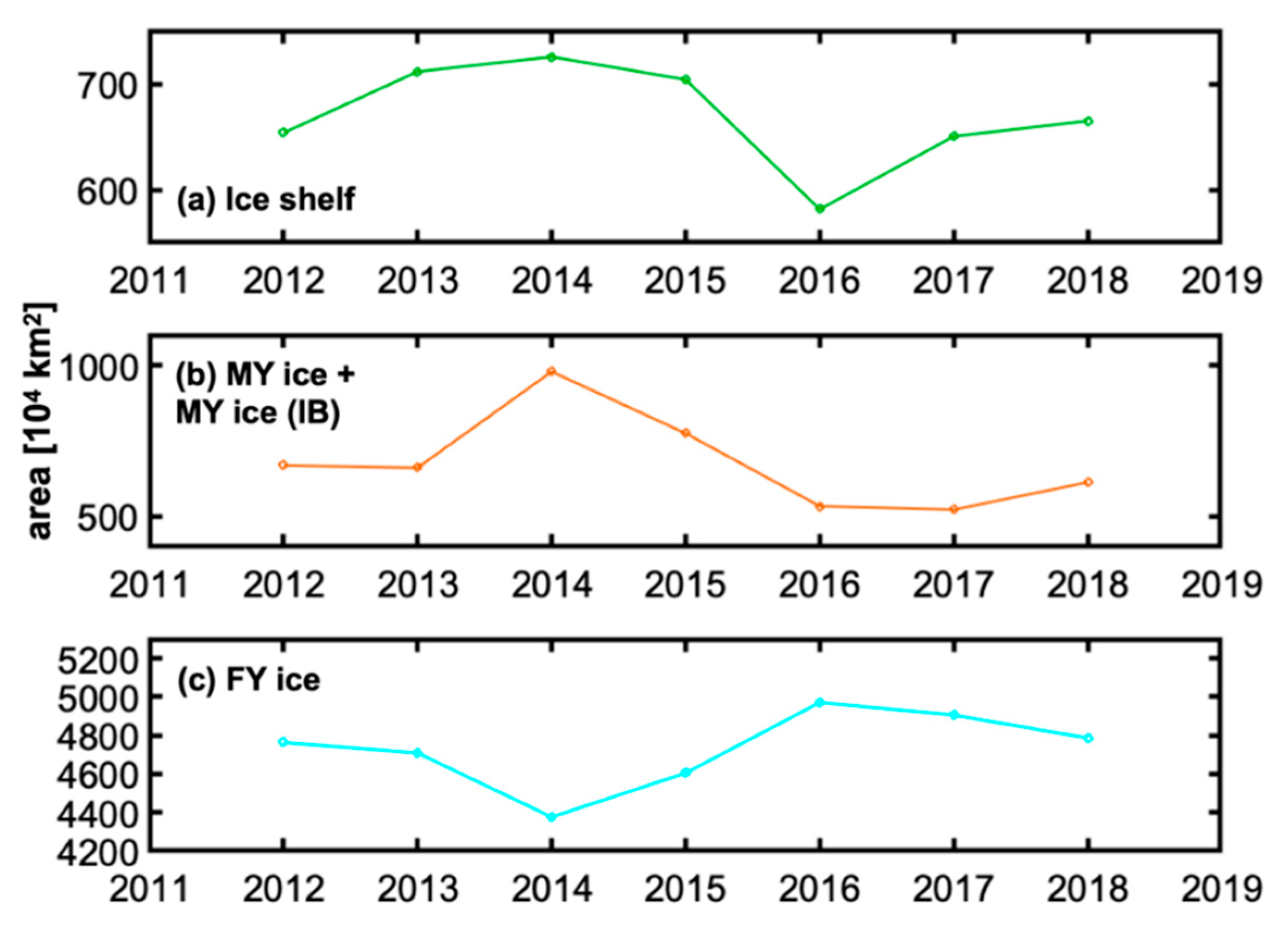
Figure 9 shows the inter-annual changes of the monthly averaged ice area in October for (a) the ice shelf, (b) MY and MY (IB) ice, and (c) FY ice, classified using the ice classification algorithm during the period of 2012 to 2018 in the region of 32–44° E and 67–71° S, including LHB. Hereafter, MY ice and MY (IB) ice are referred to as MY ice for simplicity.
The area of the ice shelf gradually increased and showed the largest area in 2014. The area then decreased until 2016, then recovering after that. The MY ice area was also largest in 2014, as was the ice shelf area. Conversely, the area of MY ice rapidly increased from 2013 to 2014, then continuously decreased from 2015 to 2016, exhibiting the smallest area in 2017.
As mentioned above, the areas of the ice shelf and MY ice had decreased during 2014 to 2016. However, there was a difference in the areal decrease. We focused on the ice edge to further study this difference.
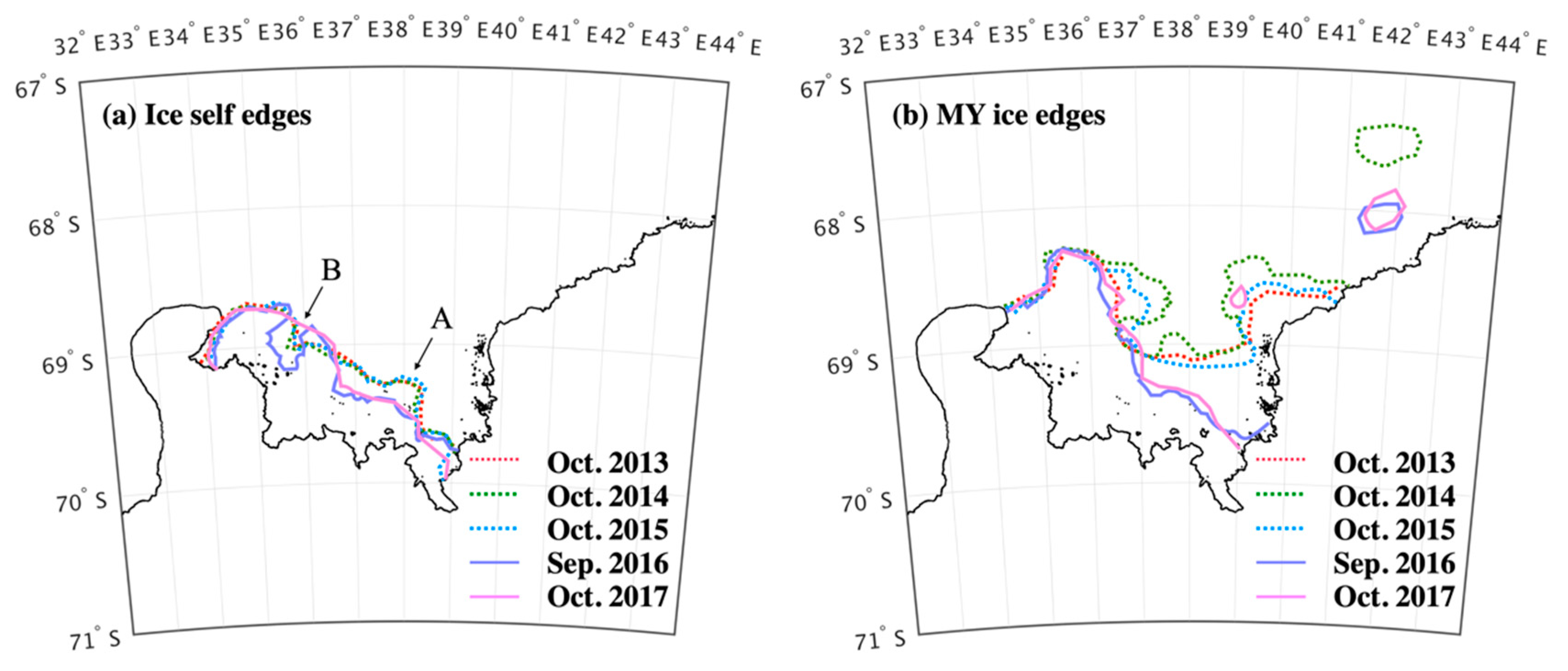
Figure 10 shows the ice edge of (a) the ice shelf and (b) MY ice, derived from the ice classification algorithm in October from 2013 to 2017.
The MY ice exhibited seaward extension in two regions, namely 37–38° E, 68.5–69° S and 39–41° E, 68.5–69° S during 2013 to 2014. In 2015, the seaward extension retreated to return to the ice edge location at 39–41° E, 68.5–69° S in 2013. In 2016, a large ice breakup occurred in the MY ice and the ice edge retreated to a similar position as the ice shelf and did not recover until 2017. The breakup of the ice shelf occurred at A after a large breakup of MY ice in April 2016. Moreover, the breakup occurred not only at A but also in the western part of A shown in
Figure 10a. However, the breakup of the ice shelf had not occurred until the large breakup in April 2016. As mentioned above, we considered the causes to indicate a difference in the areal decrease in these ice types. The large ice breakup of MY ice and the ice shelf in 2016 can be explained by this process, with the breakup of MY ice inducing the breakup of the ice shelf. This process was confirmed by the MODIS images from mid-March to early-April.
Figure 9 shows that the area of FY ice exhibited a mirrored pattern of MY ice, i.e., when the MY ice area was large, the FY ice area was small, and vice versa. This pattern can be seen in
Figure 11 from a different perspective. The figure shows a comparison of the areas of FY ice and MY ice. There was a negative correlation between these ice types. Based on this relationship, it may be possible to show that MY ice was replaced by FY ice when ice breakup occurred. Conversely, FY ice developed into MY ice and extended seaward until an ice breakup event. Periodic breakups have been reported in LHB from 1980 to 2004 [
17], and such ice breakups were reflected in the results of the current study. Importantly, the proposed ice classification algorithm was proven to be able to detect ice breakup events as quantitative changes in the distribution and ice type in a given area.
6. Conclusions
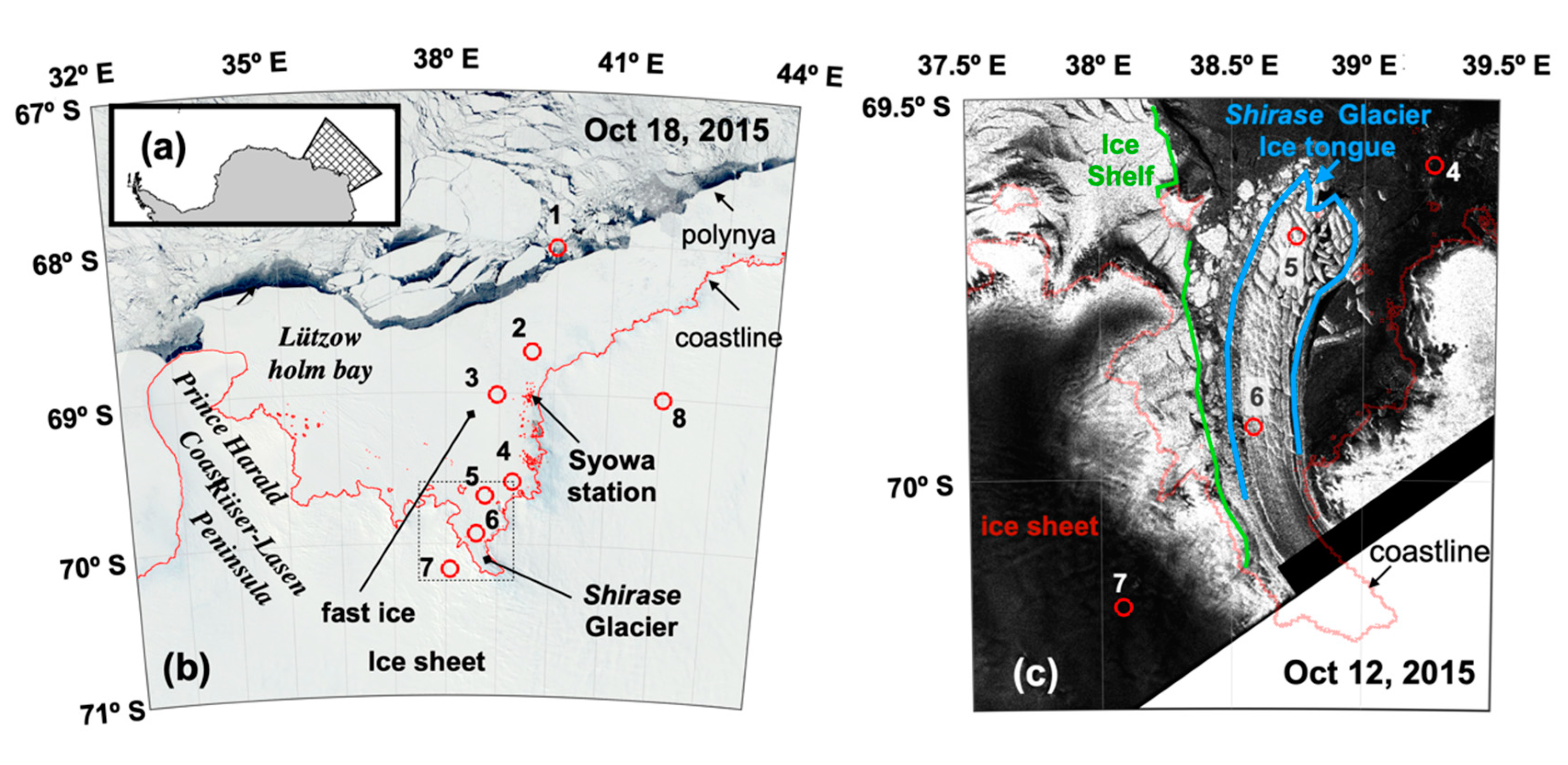
In the current study, we have investigated the annual changes of σ
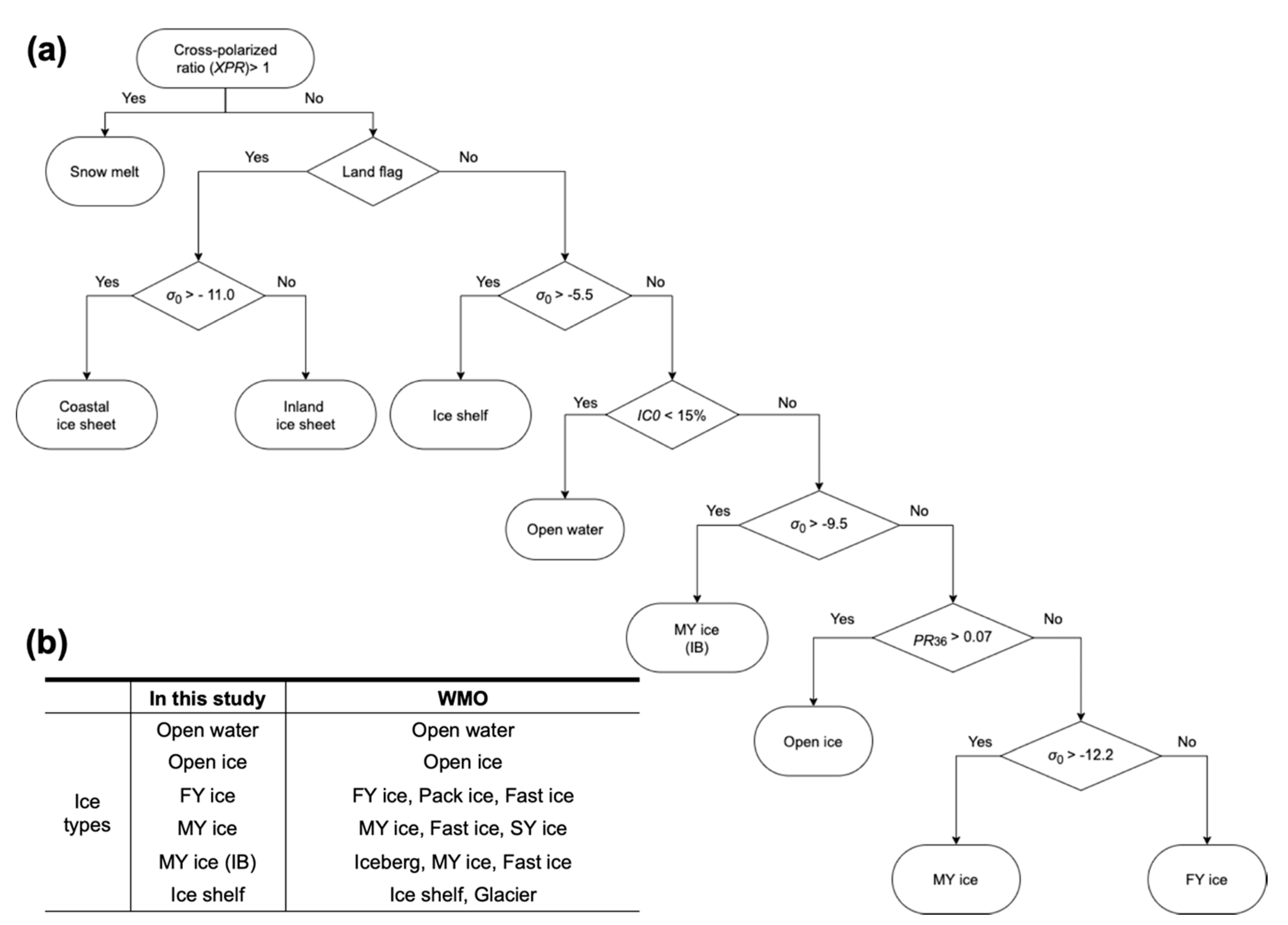
0 at eight locations in LHB, East Antarctica, by classifying ice types using ASCAT data. These ice types were defined by MODIS and C-SAR imagery of coastal Antarctica in the vicinity of LHB. An ice classification algorithm was then developed based on the threshold values of various parameters calculated from the features of each ice type (e.g. open ice, FY ice, MY ice, MY (IB) ice, ice shelf, coastal ice sheet, inland ice sheet) as shown in
Figure 4. These parameters included the melting index, XPR, PR
36, calculated from the brightness temperature, and the SIC, derived from AMSR2 instrument.
The MODIS images were not able to detect ice due to cloudy skies or insufficient sunlight. However, ASCAT and C-SAR, whose measurement wavelength ranges are in the microwave range, were able to observe ice in such situations. C-SAR images have a high resolution; however, the satellites have 18-day sub-cycles. Conversely, ASCAT is superior in terms of the temporal resolution, because data are acquired once every 3–4 days. Although the resolution is not as high as that of C-SAR images, ASCAT is superior in terms of spatiotemporal resolution.
To verify the validity of the proposed ice classification algorithm, the algorithm results were compared with visual observation data obtained from an icebreaker. Except for polynya and areas with surface melting, the results of the classification algorithm agreed with the visual observation data. The results of ice classification before and after large-scale breakup in April 2016, were compared with the corresponding MODIS and C-SAR imagery. The distribution of the MY ice and the ice shelf estimated by this ice classification algorithm matched that discernible from the satellite imagery.
Inter-annual changes in the areal extent of FY ice, MY ice, and the ice shelf were investigated using the new ice classification algorithm developed in this study. This investigation of MY ice and ice shelf areas indicated that the breakup of MY ice induced a breakup of the ice shelf. The comparison of FY ice and MY ice areas showed the replacement of these ice types. Previous studies have reported periodic breakups in LHB between 1980 and 2004 [
17], and such ice breakups were detected in the current results. Importantly, the proposed ice classification algorithm was able to detect ice breakup events as quantitative changes in the distribution and type of ice in a given area. From the above, the ice classification algorithm developed in this study can successfully simultaneously classify FY ice, MY ice, ice shelves, and ice sheets around the Antarctic continent, which has not been possible with conventional algorithms until now.
In future work, we plan to classify sea ice in other sea ice areas to test the application of the proposed algorithm throughout the Antarctic region. Accurate classification of sea ice types is important for estimating sea ice thickness. However, because there is currently no validated method for estimating sea ice thickness in the Antarctic region, the findings of the current research, derived using a newly proposed algorithm, have valuable implications.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}