Development of CO2 Band-Based Cloud Emission and Scattering Indices and Their Applications to FY-3D Hyperspectral Infrared Atmospheric Sounder



Abstract
:
1. Introduction
2. HIRAS Data Characteristics
3. Description of the Modified Cloud Detection Scheme
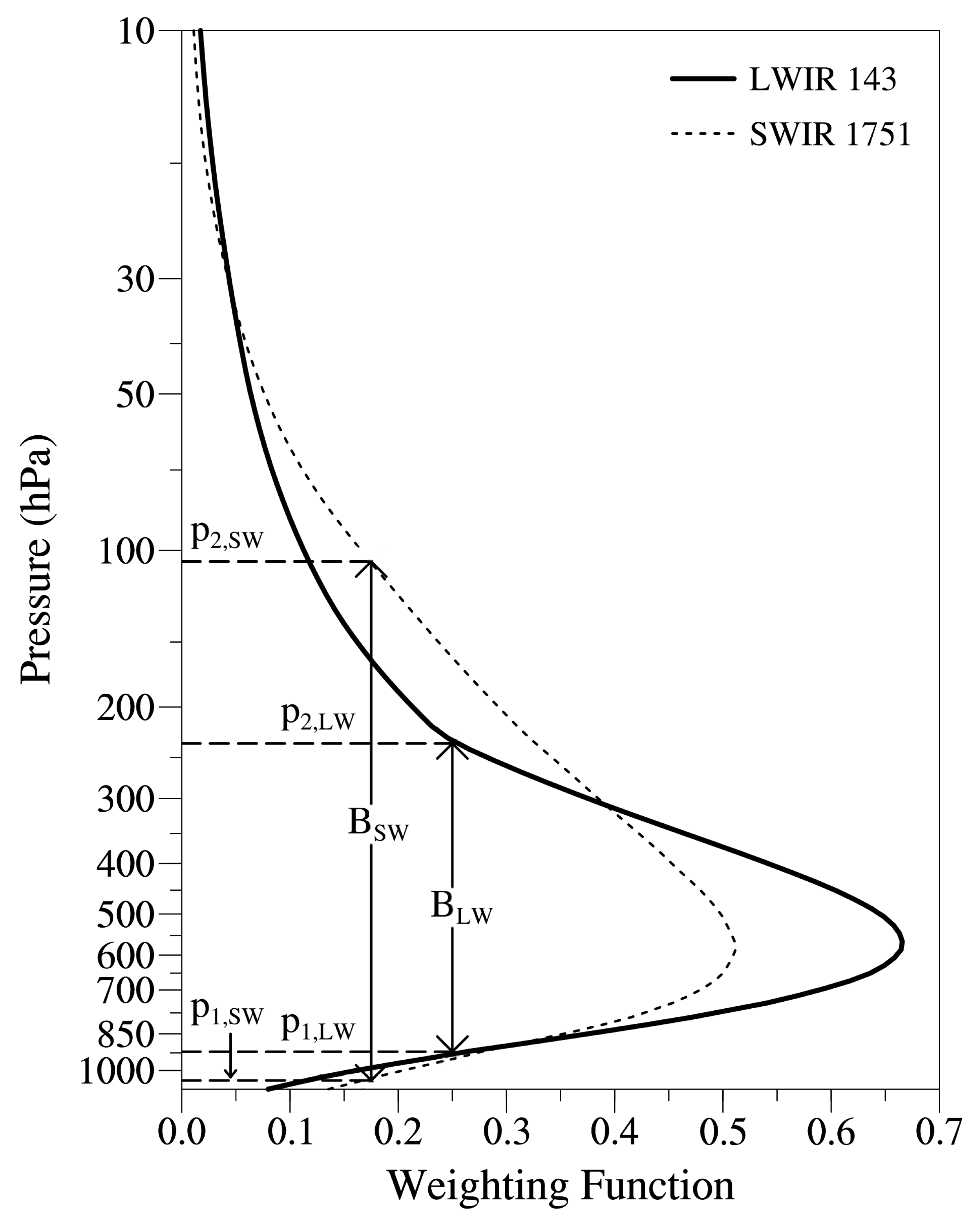
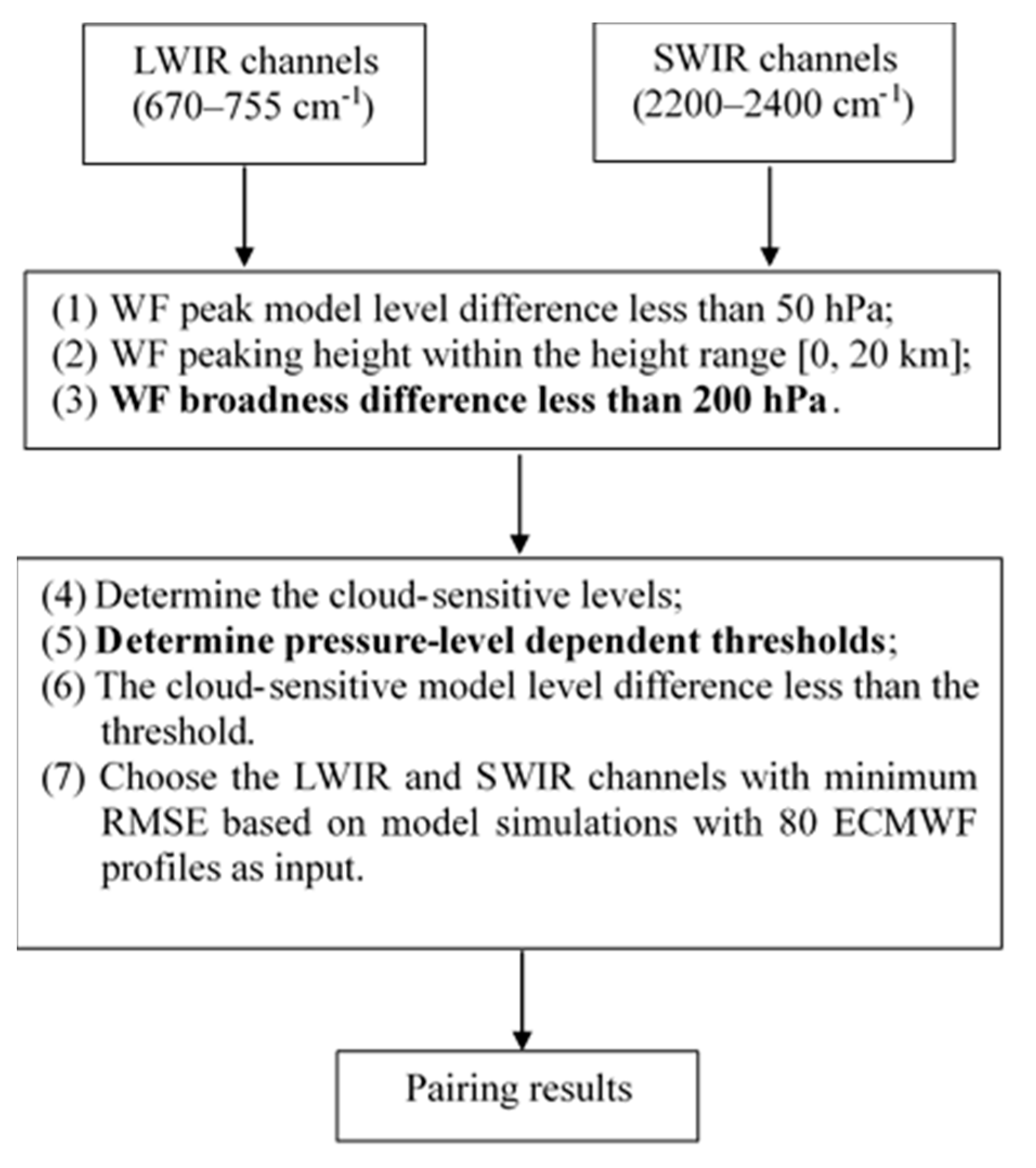
3.1. Pairing LWIR and SWIR Channels Based on WFs
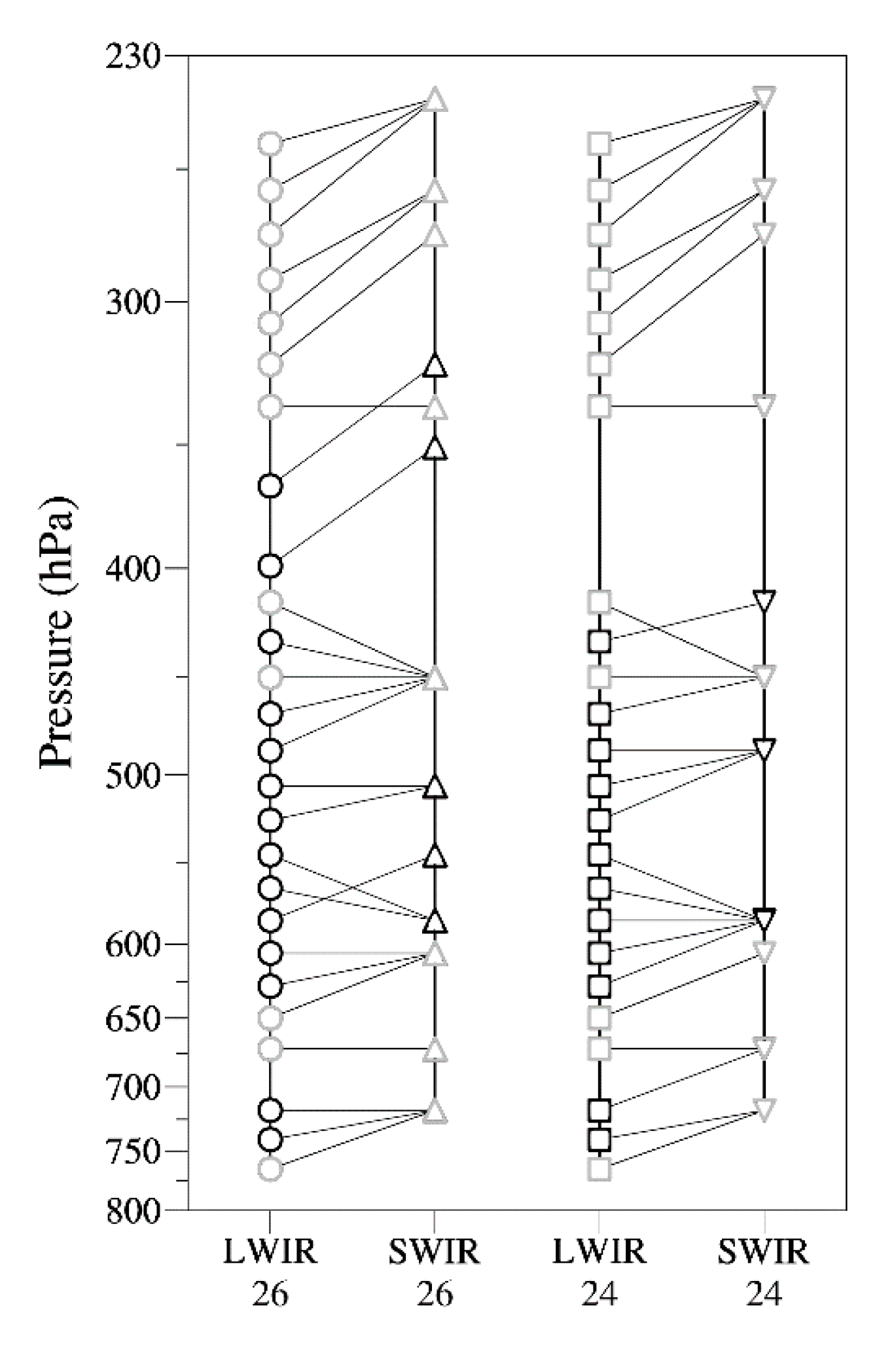
3.2. Pairing LWIR and SWIR Channels with Similar Cloud-Sensitive Levels and Minimum RMSE
3.3. Calculating the CESI
4. Results
4.1. Pairing HIRAS LWIR and SWIR Channels
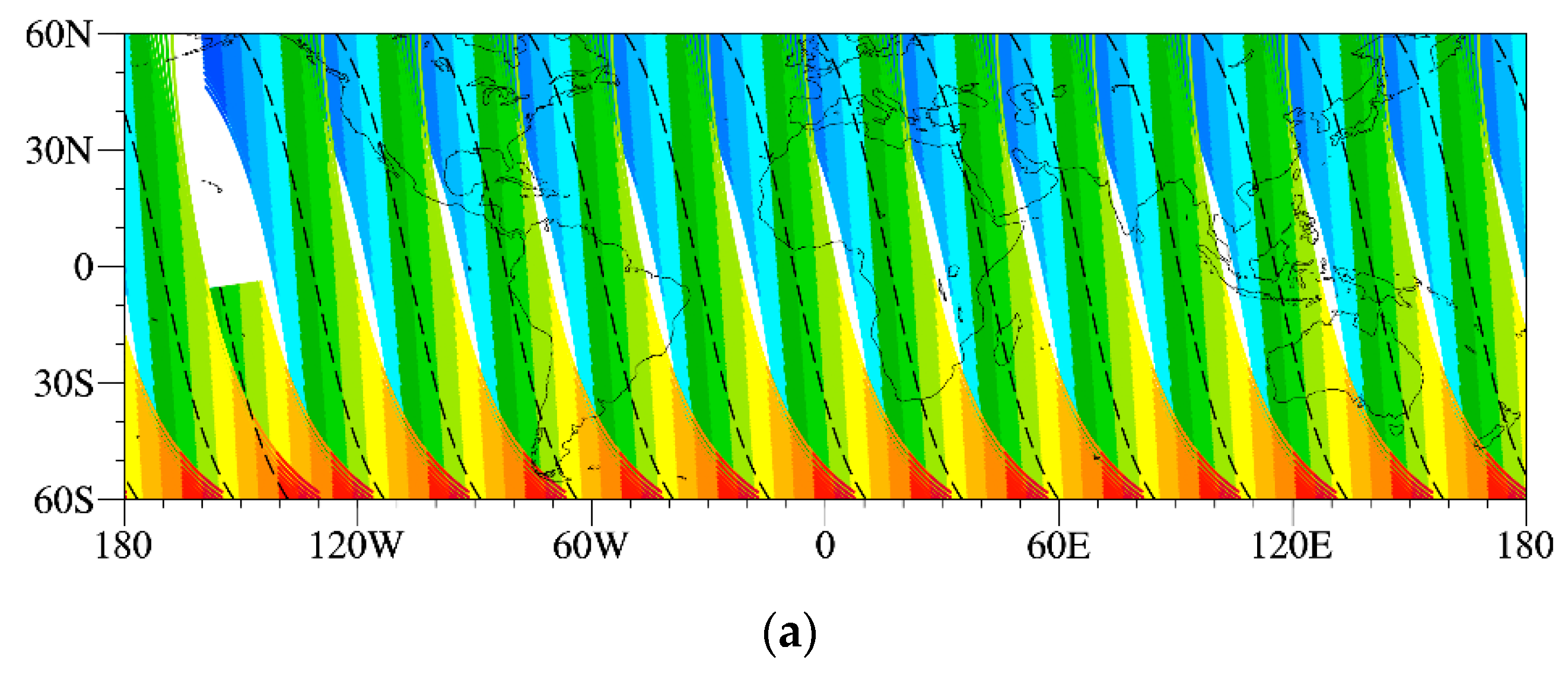
4.2. HIRAS CESIs
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aumann, H.H.; Gregorich, D.T.; Gaiser, S.L.; Chahine, M.T. Application of Atmospheric Infrared Sounder (AIRS) data to climate research. Proc. SPIE Int. Soc. Opt. Eng. 2004, 5570, 202–208. [Google Scholar]
- Blumstein, D.; Tournier, B.; Cayla, F.R.; Phulpin, T.; Fjortoft, R.; Buil, C.; Ponce, G. In-flight performance of the infrared atmospheric sounding interferometer (IASI) on METOP-A. Proc. SPIE 2007, 6684, 66840. [Google Scholar] [CrossRef]
- Pougatchev, N.; August, T.; Calbet, X.; Hultberg, T.; Oduleye, O.; Schlüssel, P.; Stiller, B.; Germain, K.S.; Bingham, G. IASI temperature and water vapor retrievals—Error assessment and validation. Atmos. Chem. Phys. Discuss. 2009, 9, 6453–6458. [Google Scholar] [CrossRef] [Green Version]
- Aumann, H.; Chahine, M.; Gautier, C.; Goldberg, M.; Kalnay, E.; McMillin, L.; Revercomb, H.; Rosenkranz, P.; Smith, W.; Staelin, D.; et al. AIRS/AMSU/HSB on the aqua mission: Design, science objectives, data products, and processing systems. IEEE Trans. Geosci. Remote Sens. 2003, 41, 253–264. [Google Scholar] [CrossRef] [Green Version]
- Klaes, K.D.; Cohen, M.; Buhler, Y.; Schlüssel, P.; Munro, R.; Luntama, J.-P.; Von Engeln, A.; Clérigh, E.Ó.; Bonekamp, H.; Ackermann, J.; et al. An Introduction to the EUMETSAT Polar system. Bull. Am. Meteorol. Soc. 2007, 88, 1085–1096. [Google Scholar] [CrossRef]
- Hilton, F.; Armante, R.; August, T.; Barnet, C.; Bouchard, A.; Camy-Peyret, C.; Capelle, V.; Clarisse, L.; Clerbaux, C.; Coheur, P.-F.; et al. Hyperspectral Earth Observation from IASI: Five Years of Accomplishments. Bull. Am. Meteorol. Soc. 2012, 93, 347–370. [Google Scholar] [CrossRef]
- Han, Y.; Revercomb, H.E.; Cromp, M.; Gu, D.; Johnson, D.B.; Mooney, D.; Scott, D.; Strow, L.L.; Bingham, G.E.; Borg, L.; et al. Suomi NPP CrIS measurements, sensor data record algorithm, calibration and validation activities, and record data quality. J. Geophys. Res. Atmos. 2013, 118, 12734–12738. [Google Scholar] [CrossRef]
- Carminati, F.; Xiao, X.; Lu, Q.; Atkinson, N.; Hocking, J. Assessment of the Hyperspectral Infrared Atmospheric Sounder (HIRAS). Remote Sens. 2019, 11, 2950. [Google Scholar] [CrossRef] [Green Version]
- Qi, C.; Wu, C.; Hu, X.; Xu, H.; Lee, L.; Zhou, F.; Gu, M.; Yang, T.; Shao, C.; Yang, Z.; et al. High Spectral Infrared Atmospheric Sounder (HIRAS): System Overview and On-Orbit Performance Assessment. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4335–4352. [Google Scholar] [CrossRef]
- Wu, C.; Qi, C.; Hu, X.; Gu, M.; Yang, T.; Xu, H.; Lee, L.; Yang, Z.; Zhang, P. FY-3D HIRAS Radiometric Calibration and Accuracy Assessment. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3965–3976. [Google Scholar] [CrossRef]
- Hilton, F.; Atkinson, N.C.; English, S.J.; Eyre, J.R. Assimilation of IASI at the Met Office and assessment of its impact through observing system experiments. Q. J. R. Meteorol. Soc. 2009, 135, 495–505. [Google Scholar] [CrossRef]
- McNally, A.P.; Watts, P.D.; Smith, J.A.; Engelen, R.; Kelly, G.A.; Thépaut, J.N.; Matricardi, M. The assimilation of AIRS radiance data at ECMWF. Q. J. R. Meteorol. Soc. 2006, 132, 935–957. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Shen, H.; Wei, Y.; Cheng, Q.; Yuan, Q. Cloud detection by fusing multi-scale convolutional features. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, IV3, 149–152. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Pan, B. Utilizing Multilevel Features for Cloud Detection on Satellite Imagery. Remote Sens. 2018, 10, 1853. [Google Scholar] [CrossRef] [Green Version]
- Mahajan, S.; Fataniya, B. Cloud detection methodologies: Variants and development—A review. Complex Intell. Syst. 2020, 6, 251–261. [Google Scholar] [CrossRef] [Green Version]
- Amato, U.; Lavanant, L.; Liuzzi, G.M.; Masiello, G.; Serio, C.; Stuhlmann, R.; Tjemkes, S. Cloud mask via cumulative discriminant analysis applied to satellite infrared observations: Scientific basis and initial evaluation. Atmos. Meas. Tech. 2014, 7, 3355–3372. [Google Scholar] [CrossRef]
- Saunders, R.W.; Kriebel, K.T. An improved method for detecting clear sky and cloudy radiances from AVHRR data. Int. J. Remote Sens. 1988, 9, 123–150. [Google Scholar] [CrossRef]
- Frey, R.A.; Ackerman, S.A.; Liu, Y.; Strabala, K.I.; Zhang, H.; Key, J.; Wang, X. Cloud Detection with MODIS. Part I: Improvements in the MODIS Cloud Mask for Collection 5. J. Atmos. Ocean. Technol. 2008, 25, 1057–1072. [Google Scholar] [CrossRef]
- Kopp, T.J.; Thomas, W.; Heidinger, A.K.; Botambekov, D.; Frey, R.A.; Hutchison, K.D.; Iisager, B.D.; Brueske, K.; Reed, B. The VIIRS Cloud Mask: Progress in the first year of S-NPP toward a common cloud detection scheme. J. Geophys. Res. Atmos. 2014, 119, 2441–2456. [Google Scholar] [CrossRef]
- McNally, A.P.; Watts, P.D. A cloud detection algorithm for high-spectral-resolution infrared sounders. Q. J. R. Meteorol. Soc. 2003, 129, 3411–3423. [Google Scholar] [CrossRef]
- Menzel, W.P.; Schmit, T.J.; Zhang, P.; Li, J. Satellite-Based Atmospheric Infrared Sounder Development and Applications. Bull. Am. Meteorol. Soc. 2018, 99, 583–603. [Google Scholar] [CrossRef]
- Smith, W.L.; Platt, C.M.R. Comparison of Satellite-Deduced Cloud Heights with Indications from Radiosonde and Ground-Based Laser Measurements. J. Appl. Meteorol. 1978, 17, 1796–1802. [Google Scholar] [CrossRef] [Green Version]
- Wielicki, B.A.; Coakley, J.A. Cloud Retrieval Using Infrared Sounder Data: Error Analysis. J. Appl. Meteorol. 1981, 20, 157–169. [Google Scholar] [CrossRef] [Green Version]
- Wylie, D.P.; Menzel, W.P.; Woolf, H.M.; Strabala, K.I. Four Years of Global Cirrus Cloud Statistics Using HIRS. J. Clim. 1995, 7, 1972–1986. [Google Scholar] [CrossRef] [Green Version]
- Lin, L.; Qin, Z.; Weng, F. Combining CrIS double CO2 bands for detecting clouds located in different layers of the atmosphere. J. Geophys. Res. Atmos. 2017, 122, 1811–1827. [Google Scholar] [CrossRef]
- Aumann, H.H.; Chen, X.; Fishbein, E.; Geer, A.; Havemann, S.; Huang, X.; Liu, X.; Liuzzi, G.; DeSouza-Machado, S.; Manning, E.M.; et al. Evaluation of Radiative Transfer Models With Clouds. J. Geophys. Res. Atmos. 2018, 123, 6142–6157. [Google Scholar] [CrossRef]
- Saunders, R.; Matricardi, M.; Brunel, P. An improved fast radiative transfer model for assimilation of satellite radiance observations. Q. J. R. Meteorol. Soc. 1999, 125, 1407–1425. [Google Scholar] [CrossRef]
- Li, X.; Zou, X. Bias characterization of CrIS radiances at 399 selected channels with respect to NWP model simulations. Atmos. Res. 2017, 196, 164–181. [Google Scholar] [CrossRef]
- Carrier, M.J.; Zou, X.; Lapenta, W.M. Identifying Cloud-Uncontaminated AIRS Spectra from Cloudy FOV Based on Cloud-Top Pressure and Weighting Functions. Mon. Weather Rev. 2007, 135, 2278–2294. [Google Scholar] [CrossRef]
- Xu, L.; Fang, S.; Niu, R.; Li, J. Cloud detection based on decision tree over tibetan plateau with modis data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 535–538. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Qin, Z.; Weng, F. Cloud and precipitation features of Super Typhoon Neoguri revealed from dual oxygen absorption band sounding instruments on board FengYun-3C satellite. Geophys. Res. Lett. 2015, 42, 916–924. [Google Scholar] [CrossRef]
- Saunders, R.; Hocking, J.; Turner, E.; Rayer, P.; Rundle, D.; Brunel, P.; Vidot, J.; Roquet, P.; Matricardi, M.; Geer, A.; et al. An update on the RTTOV fast radiative transfer model (currently at version 12). Geosci. Model Dev. 2018, 11, 2717–2737. [Google Scholar] [CrossRef] [Green Version]
- Kahn, B.H.; Hanii, T.; Stephens, G.L.; Qing, Y.; Julien, D.; Gerald, M.; Manning, E.M.; Heymsfield, A.J. The Atmospheric Infrared Sounder. Atmos. Chem. Phys. 2018, 18, 10715–10739. [Google Scholar] [CrossRef] [Green Version]
- Weisz, E.; Li, J.; Menzel, W.P.; Heidinger, A.K.; Kahn, B.H.; Liu, C.-Y. Comparison of AIRS, MODIS, CloudSat and CALIPSO cloud top height retrievals. Geophys. Res. Lett. 2007, 34, 17811. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pressure (hPa) | Number | Number |
|---|---|---|
| 250–275 | 25 | 22 |
| 275–300 | 48 | 33 |
| 300–325 | 33 | 14 |
| 325–350 | 18 | 6 |
| 350–375 | 44 | 21 |
| 375–400 | 13 | 7 |
| 400–425 | 10 | 9 |
| 425–450 | 6 | 6 |
| 450–475 | 12 | 6 |
| 475–500 | 15 | 7 |
| 500–525 | 12 | 7 |
| 525–550 | 32 | 14 |
| 550–575 | 20 | 17 |
| 575–600 | 8 | 8 |
| 600–625 | 6 | 6 |
| 625–650 | 9 | 6 |
| 650–675 | 6 | 4 |
| 700–725 | 2 | 2 |
| 725–750 | 2 | 2 |
| 750–775 | 1 | 1 |
| Pair | Step 1 | Step 2 | ||
|---|---|---|---|---|
| RMSE (K) | ||||
| 1 | 12 | 28 | 23 | 11.5 |
| 2 | 25 | 0 | 16 | 9.8 |
| 3 | 38 | 0 | 18 | 8.6 |
| 4 | 27 | 74 | 14 | 9.2 |
| 5 | 38 | 51 | 10 | 8.6 |
| 6 | 42 | 31 | 19 | 9.4 |
| 7 | 0 | 32 | 6 | 11.3 |
| 8 | 45 | 101 | 46 | 13.6 |
| 9 | 48 | 78 | 36 | 12.8 |
| 10 | 35 | 19 | 5 | 15.8 |
| 11 | 17 | 44 | 1 | 15.3 |
| 12 | 0 | 11 | 33 | 15.0 |
| 13 | 18 | 3 | 6 | 15.1 |
| 14 | 37 | 34 | 32 | 13.7 |
| 15 | 0 | 107 | 3 | 12.8 |
| 16 | 19 | 186 | 16 | 12.1 |
| 17 | 40 | 178 | 1 | 9.0 |
| 18 | 20 | 162 | 7 | 8.3 |
| 19 | 40 | 134 | 4 | 11.0 |
| 20 | 0 | 57 | 9 | 14.3 |
| 21 | 22 | 57 | 1 | 14.1 |
| 22 | 44 | 134 | 6 | 14.7 |
| 23 | 0 | 180 | 8 | 8.9 |
| 24 | 0 | 39 | 26 | 12.5 |
| 25 | 23 | 66 | 11 | 11.9 |
| 26 | 47 | 158 | 35 | 5.8 |
| Pair | LWIR | SWIR | ||||||
|---|---|---|---|---|---|---|---|---|
| Channel Number | Wave-Number (cm−1) | Peak WF (hPa) | Channel Number | Wave-number (cm−1) | Peak WF (hPa) | |||
| 1 | 88 | 704.375 | 253 | 368 | 1799 | 2252.500 | 241 | 391 |
| 2 | 111 | 718.750 | 266 | 407 | 1799 | 2252.500 | 241 | 391 |
| 3 | 91 | 706.250 | 279 | 409 | 1799 | 2252.500 | 241 | 391 |
| 4 | 94 | 708.125 | 293 | 440 | 1791 | 2247.500 | 266 | 454 |
| 5 | 95 | 708.750 | 307 | 444 | 1791 | 2247.500 | 266 | 454 |
| 6 | 98 | 710.625 | 321 | 501 | 1783 | 2242.500 | 279 | 520 |
| 7 | 99 | 711.250 | 336 | 509 | 2015 | 2387.500 | 336 | 503 |
| 8 | 105 | 715.000 | 366 | 640 | 1735 | 2212.500 | 321 | 716 |
| 9 | 108 | 716.875 | 399 | 652 | 1759 | 2227.500 | 351 | 718 |
| 10 | 146 | 740.625 | 415 | 705 | 2019 | 2390.000 | 450 | 710 |
| 11 | 107 | 716.250 | 433 | 709 | 2019 | 2390.000 | 450 | 710 |
| 12 | 109 | 717.500 | 450 | 677 | 2019 | 2390.000 | 450 | 710 |
| 13 | 127 | 728.750 | 468 | 704 | 2019 | 2390.000 | 450 | 710 |
| 14 | 131 | 731.250 | 487 | 678 | 2019 | 2390.000 | 450 | 710 |
| 15 | 124 | 726.875 | 506 | 827 | 1755 | 2225.000 | 506 | 830 |
| 16 | 136 | 734.375 | 525 | 814 | 1755 | 2225.000 | 506 | 830 |
| 17 | 142 | 738.125 | 545 | 814 | 1715 | 2200.000 | 585 | 815 |
| 18 | 140 | 736.875 | 565 | 822 | 1715 | 2200.000 | 585 | 815 |
| 19 | 125 | 727.500 | 585 | 846 | 1751 | 2222.500 | 545 | 850 |
| 20 | 123 | 726.250 | 606 | 867 | 2027 | 2395.000 | 606 | 876 |
| 21 | 120 | 724.375 | 628 | 875 | 2027 | 2395.000 | 606 | 876 |
| 22 | 151 | 743.750 | 650 | 870 | 2027 | 2395.000 | 606 | 876 |
| 23 | 168 | 754.375 | 672 | 897 | 2031 | 2397.500 | 672 | 889 |
| 24 | 154 | 745.625 | 718 | 923 | 2035 | 2400.000 | 718 | 897 |
| 25 | 150 | 743.125 | 741 | 908 | 2035 | 2400.000 | 718 | 897 |
| 26 | 167 | 753.750 | 765 | 932 | 2035 | 2400.000 | 718 | 897 |
| Pair | LWIR | SWIR | ||||||
|---|---|---|---|---|---|---|---|---|
| Channel Number | Wave-Number (cm−1) | Peak WF (hPa) | Channel Number | Wave-Number (cm−1) | Peak WF (hPa) | |||
| 1 | 88 | 704.375 | 253 | 368 | 1799 | 2252.500 | 241 | 391 |
| 2 | 111 | 718.750 | 266 | 407 | 1799 | 2252.500 | 241 | 391 |
| 3 | 91 | 706.250 | 279 | 409 | 1799 | 2252.500 | 241 | 391 |
| 4 | 94 | 708.125 | 293 | 440 | 1791 | 2247.500 | 266 | 454 |
| 5 | 95 | 708.750 | 307 | 444 | 1791 | 2247.500 | 266 | 454 |
| 6 | 98 | 710.625 | 321 | 501 | 1783 | 2242.500 | 279 | 520 |
| 7 | 99 | 711.250 | 336 | 509 | 2015 | 2387.500 | 336 | 503 |
| 8 | 146 | 740.625 | 415 | 705 | 2019 | 2390.000 | 450 | 710 |
| 9 | 107 | 716.250 | 433 | 709 | 1732 | 2205.000 | 415 | 758 |
| 10 | 109 | 717.500 | 450 | 677 | 2019 | 2390.000 | 450 | 710 |
| 11 | 116 | 721.875 | 468 | 741 | 2019 | 2390.000 | 450 | 710 |
| 12 | 139 | 736.250 | 487 | 797 | 1719 | 2202.500 | 487 | 840 |
| 13 | 124 | 726.875 | 506 | 827 | 1719 | 2202.500 | 487 | 840 |
| 14 | 133 | 732.500 | 525 | 819 | 1719 | 2202.500 | 487 | 840 |
| 15 | 145 | 740.000 | 545 | 778 | 1715 | 2200.000 | 585 | 815 |
| 16 | 143 | 738.750 | 565 | 826 | 1715 | 2200.000 | 585 | 815 |
| 17 | 125 | 727.500 | 585 | 846 | 1715 | 2200.000 | 585 | 815 |
| 18 | 149 | 742.500 | 606 | 865 | 1715 | 2200.000 | 585 | 815 |
| 19 | 153 | 745.000 | 628 | 825 | 1715 | 2200.000 | 585 | 815 |
| 20 | 151 | 743.750 | 650 | 870 | 2027 | 2395.000 | 606 | 876 |
| 21 | 168 | 754.375 | 672 | 897 | 2031 | 2397.500 | 672 | 889 |
| 22 | 154 | 745.625 | 718 | 923 | 2031 | 2397.500 | 672 | 889 |
| 23 | 158 | 748.125 | 741 | 925 | 2035 | 2400.000 | 718 | 897 |
| 24 | 167 | 753.750 | 765 | 932 | 2035 | 2400.000 | 718 | 897 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, X.; Zou, X. Development of CO2 Band-Based Cloud Emission and Scattering Indices and Their Applications to FY-3D Hyperspectral Infrared Atmospheric Sounder. Remote Sens. 2020, 12, 4171. https://doi.org/10.3390/rs12244171
Xia X, Zou X. Development of CO2 Band-Based Cloud Emission and Scattering Indices and Their Applications to FY-3D Hyperspectral Infrared Atmospheric Sounder. Remote Sensing. 2020; 12(24):4171. https://doi.org/10.3390/rs12244171
Chicago/Turabian StyleXia, Xinlu, and Xiaolei Zou. 2020. "Development of CO2 Band-Based Cloud Emission and Scattering Indices and Their Applications to FY-3D Hyperspectral Infrared Atmospheric Sounder" Remote Sensing 12, no. 24: 4171. https://doi.org/10.3390/rs12244171
APA StyleXia, X., & Zou, X. (2020). Development of CO2 Band-Based Cloud Emission and Scattering Indices and Their Applications to FY-3D Hyperspectral Infrared Atmospheric Sounder. Remote Sensing, 12(24), 4171. https://doi.org/10.3390/rs12244171