Lightweight Integrated Solution for a UAV-Borne Hyperspectral Imaging System



Abstract
:
1. Introduction
2. System Configuration
3. DCSU and Data Acquisition Software
4. Data Processing Software
4.1. Radiance and Surface Reflectance Computation
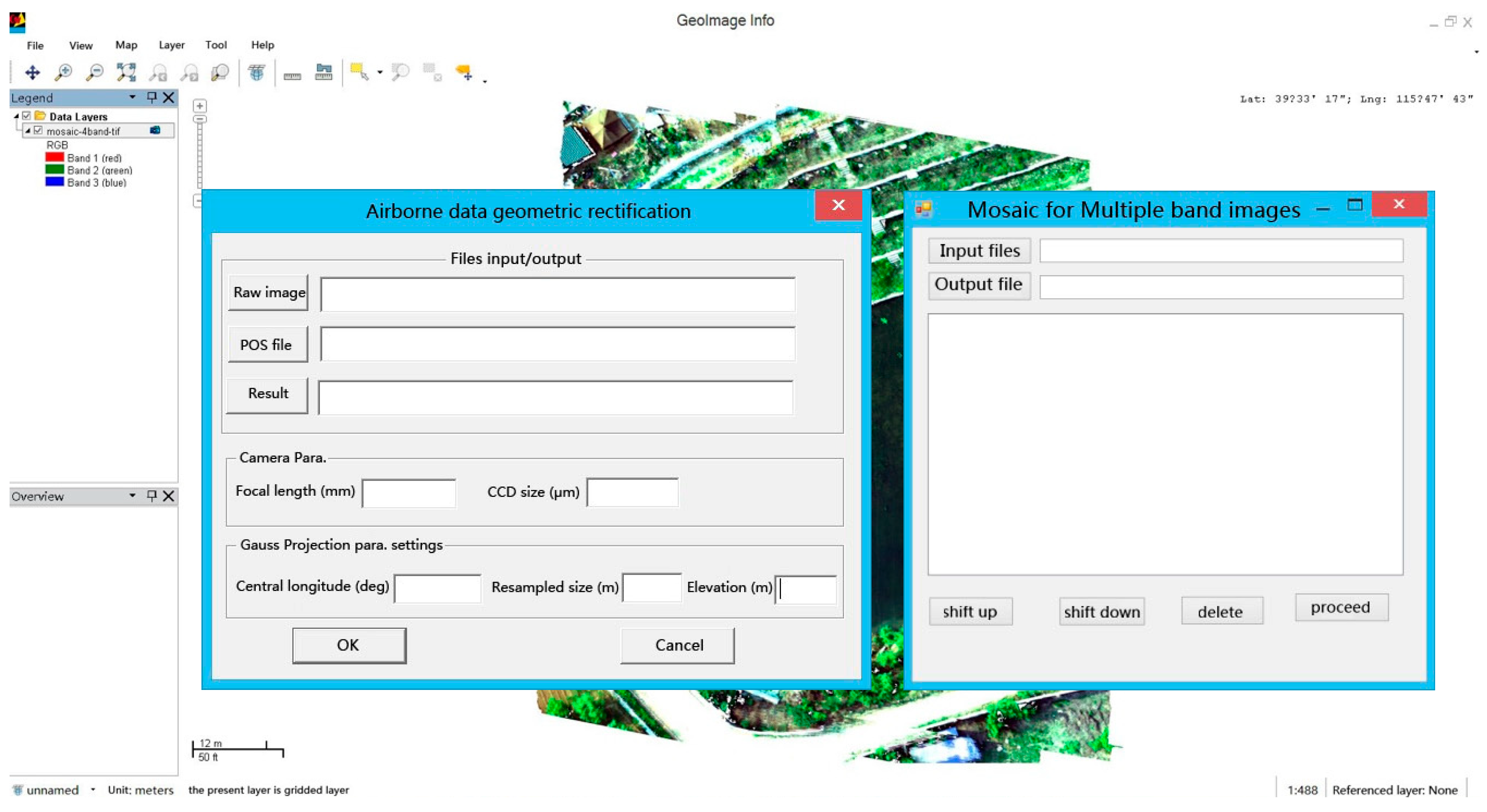
4.2. Georeferencing and Mosaicking
- (1)
- Screening the abnormal records in the GPS/IMU file. Table 2 lists the entries of a typical GPS/IMU file in ASCII format. The GPS/IMU records sometimes contain abnormal geographic position or attitude parameter values as a result of unknown factors. The abnormal values are very large (much more than 1.0 × 1010) in latitude, longitude, and height. Therefore, a simple criterion was set to screen them by determining whether the latitude and longitude values were out of a meaningful geographic scope (i.e., −180° to 180° of longitude and −90° to 90° of latitude). Finally, the abnormal values can be replaced by the average values of the adjacent lines.
- (2)
- Calculating the projected map coordinates for each pixel. This step is similar to the ordinate geometric referencing procedure used for manned airborne pushbroom images involving collinearity equations and including several coordinate transformations [15,34,35]. The focal length and physical pixel size and the expected projected map coordinate (e.g., Universal Transverse Mercator (UTM) or Gauss–Kruger coordinate) should be known after the image is georeferenced.
- (3)
- Resampling from original data. The geometric referencing results must be resampled into a regular grid. A resampling strategy is always used to find the accurate position in the original raw image for a certain pixel in the projected image space. One georeferencing method involving a geographic lookup table (GLT) developed by ENVI could work well for satellite data or manned airborne pushbroom images; however, it always failed for the UAV pushbroom images in our experience. An alternative strategy was to assign a reasonable value for the gridded pixel by using the nearest projected pixels or considering the weights of the surrounding pixels projected from the original image to the projected image space (Equation (3)):where P denotes the pixel in the projected image with the column index i and row index j; k (1, ..., n) refers to the index of the pixel projected within one pixel distance near P (i.e., from i-0.5 to i-0.5 and from j-0.5 to j + 0.5); G is the neighboring pixel of P(i, j) after being projected from the original image position () into the new position () of the projected image; and w is the weight of the pixel calculated by the area it contributes to the final pixel G. To avoid oversampling, it is recommended that the resampling resolution should not be set to a value higher than the real one determined by flight height, imager focal length, and pixel size.
- (4)
- Filling in the gaps using the neighbor pixels. Such gaps usually appear when wind gusts suddenly push the UAV forward at a speed that exceeds the speed expected according to its exposure time and flight height. Thus, it is better to fill in the gap lines by weighting the upper and lower valid pixels in the direction along the flight direction. In our resampling strategy, the georeferencing image was rotated at a certain angle to align the flight direction along the image column. The gap was much easier to fill by just using the pixels in the upper and lower rows.
5. Results
5.1. Zhuozhou Experiment
5.2. Hong Kong Experiment
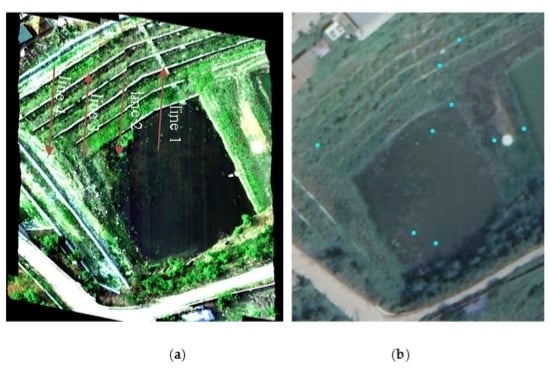
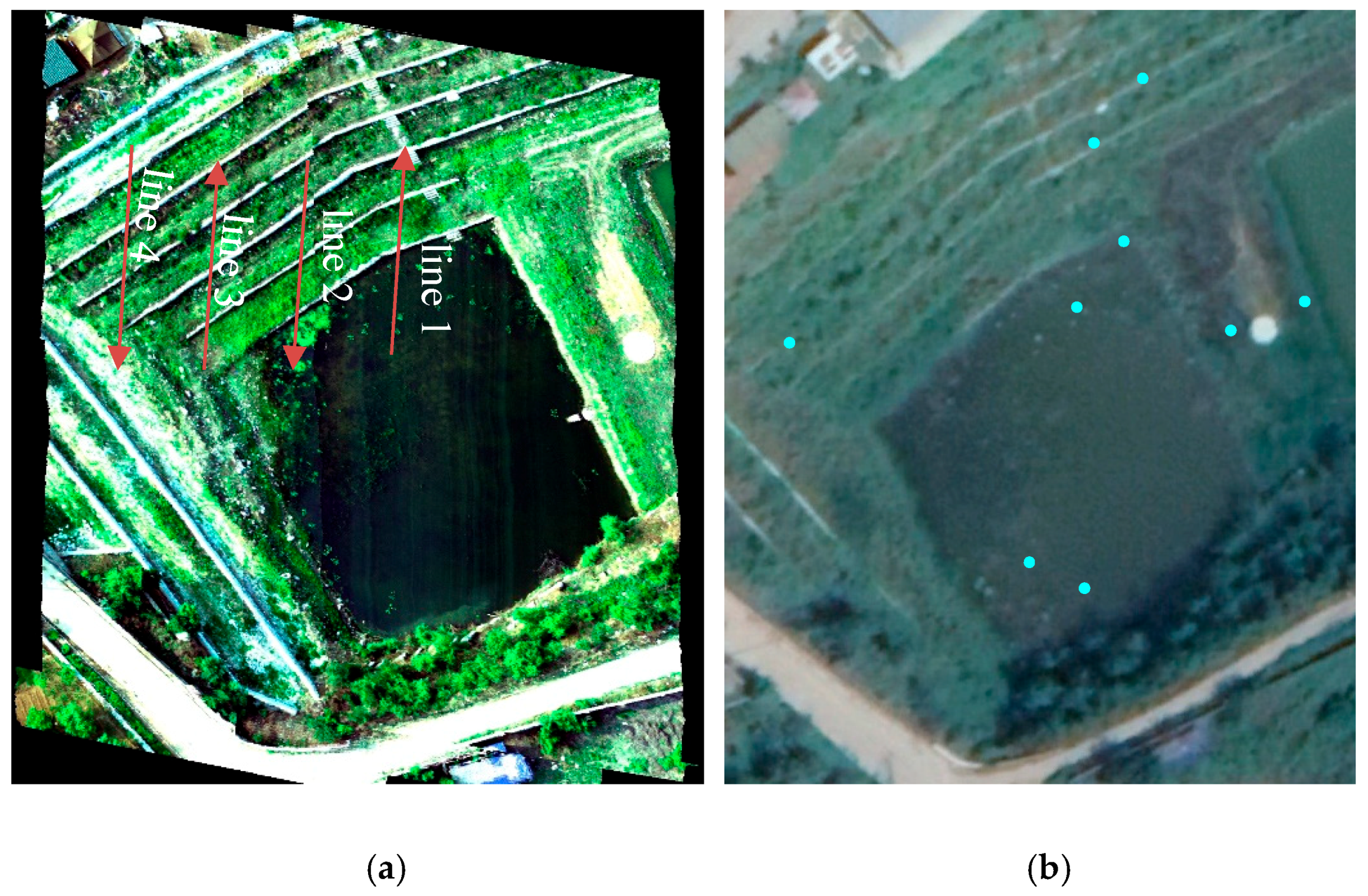
5.3. Geometric Correction Accuracy Evaluation
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Zhong, Y.; Wang, X.; Xu, Y.; Wang, S.; Jia, T.; Hu, X.; Zhao, J.; Wei, L.; Zhang, L. Mini-UAV-Borne Hyperspectral Remote Sensing: From Observation and Processing to Applications. IEEE Geosci. Remote Sens. Mag. 2018, 6, 46–62. [Google Scholar] [CrossRef]
- Photonics. Available online: http://www.headwallphotonics.com (accessed on 22 May 2019).
- Cubert. Available online: https://cubert-gmbh.com/spectral-cameras/ (accessed on 22 May 2019).
- BaySpec. Available online: https://www.bayspec.com (accessed on 22 May 2019).
- SENOP. Available online: https://senop.fi/en/optronics-hyperspectral (accessed on 7 October 2019).
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef] [Green Version]
- Gao, L.; Smith, R.T. Optical hyperspectral imaging in microscopy and spectroscopy - a review of data acquisition. J. Biophotonics 2015, 8, 441–456. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Strauch, M.; Livshits, I.L.; Bociort, F.; Urbach, H.P. Wide-angle spectral imaging using a Fabry-Pérot interferometer. J. Eur. Opt. Soc. Rapid Publ. 2015, 10. [Google Scholar] [CrossRef] [Green Version]
- Mäkeläinen, A.; Saari, H.; Hippi, I.; Sarkeala, J.; Soukkamäki, J. 2D Hyperspectral frame imager camera data in photo- grammetric mosaicking. In Proceedings of the ISPRS International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences (UAV-g2013), Rostock, Germany, 4–6 September 2013; Volume XL-1/W2, pp. 263–268. [Google Scholar]
- Bareth, G.; Aasen, H.; Bendig, J.; Gnyp, M.L.; Bolten, A.; Jung, A.; Michels, R.; Soukkamäki, J. Low-weight and UAV-based Hyperspectral Full-frame Cameras for Monitoring Crops: Spectral Comparison with Portable Spectroradiometer Measurements. Photogramm. Fernerkund. Geoinf. 2015, 2015, 69–79. [Google Scholar] [CrossRef]
- Nano-Hyperspec. Available online: https://cdn2.hubspot.net/hubfs/145999/Nano-Hyperspec_Oct19.pdf (accessed on 22 May 2019).
- Hill, S.L.; Clemens, P. Miniaturization of sub-meter resolution hyperspectral imagers on unmanned aerial systems. In Proceedings of the SPIE 9104, Spectral Imaging Sensor Technologies: Innovation Driving Advanced Application Capabilities, Baltimore, MD, USA, 28 May 2014. [Google Scholar]
- Lucieer, A.; Malenovský, Z.; Veness, T.; Wallace, L. HyperUAS-Imaging Spectroscopy from a Multirotor Unmanned Aircraft System. J. Field Robot. 2014, 31, 571–590. [Google Scholar] [CrossRef] [Green Version]
- Jaud, M.; Le Dantec, N.; Ammann, J.; Grandjean, P.; Constantin, D.; Akhtman, Y.; Barbieux, K.; Allemand, P.; Delacourt, C.; Merminod, B. Direct Georeferencing of a Pushbroom, Lightweight Hyperspectral System for Mini-UAV Applications. Remote Sens. 2018, 10, 204. [Google Scholar] [CrossRef] [Green Version]
- Hyperspec® MV.X. Available online: https://www.headwallphotonics.com/hyperspectral-sensors (accessed on 9 October 2019).
- SBG Ellipse2-N. Available online: http://www.canalgeomatics.com/product/ellipse2-n-miniature-ins-gps/?gclid=Cj0KCQjwivbsBRDsARIsADyISJ8QVollVsPQDd7fwsE3kyzeD4t7EYZZMP1EmcBE5x1lUiNMp8n8YEAaAmmcEALw_wcB (accessed on 9 October 2019).
- Ronin-MX. Available online: https://www.dji.com/ronin-mx/info#specs (accessed on 9 October 2019).
- Matrice 600 Pro. Available online: https://www.dji.com/matrice600-pro/info#specs (accessed on 9 October 2019).
- Zhang, H.; Zhang, B.; Chen, Z.; Huang, Z. Vicarious Radiometric Calibration of the Hyperspectral Imaging Microsatellites SPARK-01 and -02 over Dunhuang, China. Remote Sens. 2018, 10, 120. [Google Scholar] [CrossRef] [Green Version]
- Haiwei, L.; Hao, Z.; Bing, Z.; Zhengchao, C.; Minhua, Y.; Yaqiong, Z. A Method Suitable for Vicarious Calibration of a UAV Hyperspectral Remote Sensor. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3209–3223. [Google Scholar] [CrossRef]
- Brook, A.; Polinova, M.; Ben-Dor, E. Fine tuning of the SVC method for airborne hyperspectral sensors: The BRDF correction of the calibration nets targets. Remote Sens. Environ. 2018, 204, 861–871. [Google Scholar] [CrossRef]
- Kotchenova, S.Y.; Vermote, E.F.; Levy, R.; Lyapustin, A. Radiative transfer codes for atmospheric correction and aerosol retrieval: Intercomparison study. Appl. Opt. 2008, 47, 2215–2226. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; Bosch, J.v.d. MODTRAN® 6: A major upgrade of the MODTRAN® radiative transfer code. In Proceedings of the 2014 6th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Lausanne, Switzerland, 24–27 June 2014; pp. 1–4. [Google Scholar]
- Richter, R. Correction of atmospheric and topographic effects for high spatial resolution satellite imagery. Int. J. Remote Sens. 1997, 18, 1099–1111. [Google Scholar] [CrossRef]
- Richter, R.; Schläpfer, D. Atmospheric/Topographic Correction for Satellite Imagery: ATCOR-2/3 User Guide. Available online: http://www.rese.ch/pdf/atcor3_manual.pdf (accessed on 12 February 2020).
- Miller, C.J. Performance assessment of ACORN atmospheric correction algorithm. In Proceedings of the SPIE 4725, Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery VIII, Orlando, FL, USA, 2 August 2002. [Google Scholar] [CrossRef]
- Matthew, M.W.; Adler-Golden, S.M.; Berk, A.; Richtsmeier, S.C.; Levine, R.Y.; Bernstein, L.S.; Acharya, P.K.; Anderson, G.P.; Felde, G.W.; Hoke, M.L.; et al. Status of atmospheric correction using a MODTRAN4-based algorithm. In Proceedings of the SPIE 4049, Algorithms for Multispectral, Hyperspectral, and Ultraspectral Imagery VI, Orlando, FL, USA, 23 August 2000. [Google Scholar] [CrossRef]
- Anderson, G.P.; Pukall, B.; Allred, C.L.; Jeong, L.S.; Hoke, M.; Chetwynd, J.H.; Adler-Golden, S.M.; Berk, A.; Bernstein, L.S.; Richtsmeier, S.C.; et al. FLAASH and MODTRAN4: state-of-the-art atmospheric correction for hyperspectral data. In Proceedings of the 1999 IEEE Aerospace Conference, Proceedings (Cat. No. 99TH8403), Aspen, CO, USA, 7 March 1999; Volume 174, pp. 177–181. [Google Scholar]
- Adler-Golden, S.M.; Matthew, M.W.; Bernstein, L.S.; Levine, R.Y.; Berk, A.; Richtsmeier, S.C.; Acharya, P.K.; Anderson, G.P.; Felde, J.W.; Gardner, J.A.; et al. Atmospheric correction for shortwave spectral imagery based on MODTRAN4. In Proceedings of the SPIE 3753, Imaging Spectrometry V, Denver, CO, USA, 27 October 1999. [Google Scholar] [CrossRef]
- Zheng, Q.; Kindel, B.C.; Goetz, A.F.H. The High Accuracy Atmospheric Correction for Hyperspectral Data (HATCH) model. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1223–1231. [Google Scholar] [CrossRef]
- Smith, G.M.; Milton, E.J. The use of the empirical line method to calibrate remotely sensed data to reflectance. Int. J. Remote Sens. 2010, 20, 2653–2662. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; McCabe, M.; Parkes, S.; Clarke, I. Pushbroom Hyperspectral Imaging from an Unmanned Aircraft System (Uas) – Geometric Processingworkflow and Accuracy Assessment. Isprs - Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W6, 379–384. [Google Scholar] [CrossRef] [Green Version]
- Schläpfer, D.; Richter, R. Geo-atmospheric processing of airborne imaging spectrometry data. Part 1: Parametric orthorectification. Int. J. Remote Sens. 2010, 23, 2609–2630. [Google Scholar] [CrossRef]
- Gabrlik, P.; Cour-Harbo, A.l.; Kalvodova, P.; Zalud, L.; Janata, P. Calibration and accuracy assessment in a direct georeferencing system for UAS photogrammetry. Int. J. Remote Sens. 2018, 39, 4931–4959. [Google Scholar] [CrossRef] [Green Version]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Planet. Planet Imagery Product Specifications. Available online: https://assets.planet.com/docs/Planet_Combined_Imagery_Product_Specs_letter_screen.pdf (accessed on 16 March 2019).
- Barbieux, K. Pushbroom Hyperspectral Data Orientation by Combining Feature-Based and Area-Based Co-Registration Techniques. Remote Sens. 2018, 10, 645. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Specification |
|---|---|---|
| Imager (Headwall Micro-Hyperspec VNIR A-Series [16]) | Wavelength | 400–1000 nm |
| Spatial pixels | 1004 | |
| Bit depth | 12-bit | |
| Full width at half maximum (max.) (FWHM) | 5.8 nm | |
| Frame rate | ≥30 HZ | |
| Pixel size | 7.4 µm | |
| Focal plane array | Silicon CCD | |
| Weight | 0.68 kg | |
| Signal-to-noise ratio (SNR) | ≥60 | |
| GPS/IMU (SBG Ellipse2-N [17]) | Roll and pitch accuracy | 0.1° |
| Heading accuracy | 0.5° | |
| Position accuracy | 2 m | |
| Output rate | 200 HZ | |
| Weight | 47 g | |
| Gimbal (DJI Ronin-MX 3-Axis Gimbal Stabilizer [18]) | Rotation range | pitch: −150°–270° roll: −110°–110° yaw: 360° |
| Follow speed | pitch: 100°/s roll: 30°/s yaw: 200°/s | |
| Stabilization accuracy | ±0.02° | |
| Weight | 2.15 kg | |
| Load capacity | 4.5 kg | |
| UAV (Matrice 600 Pro [19]) | Dimensions (mm) | 1668 (L) × 1518 (W) × 727 (H) |
| Weight (with batteries) | 10 kg | |
| Max. takeoff weight | 15.5 kg | |
| Max. speed | 65 km/h (no wind) | |
| Hovering Accuracy | Vertical: ±0.5 m, horizontal: ±1.5 m | |
| Max. Wind Resistance | 8 m/s | |
| Max. Service Ceiling Above Sea Level | 2500 m by 2170R propellers; 4500 m by 2195 propellers | |
| Operating temperature | −10 to 40 °C | |
| Max. transmission distance | 3.5 km |
| Item | Unit | Data Type | Meaning | Example |
|---|---|---|---|---|
| No. | none | Integer | Row number of the image | 2948 |
| Time | none | String (yyyy/mm/dd hh:mm:ss) | Exposure time | 2018/05/18 15:21:49.424900 |
| Longitude | degree | Double | Geographic longitude | 121.9721375 |
| Latitude | degree | Double | Geographic latitude | 31.53649527 |
| Altitude | meter | Double | Elevation above sea level | 108.6938 |
| Roll | degree | Float | Roll angle | −1.38 |
| Pitch | degree | Float | Pitch angle | 2.21 |
| Yaw | degree | Float | Yaw angle | 150.68 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhang, B.; Wei, Z.; Wang, C.; Huang, Q. Lightweight Integrated Solution for a UAV-Borne Hyperspectral Imaging System. Remote Sens. 2020, 12, 657. https://doi.org/10.3390/rs12040657
Zhang H, Zhang B, Wei Z, Wang C, Huang Q. Lightweight Integrated Solution for a UAV-Borne Hyperspectral Imaging System. Remote Sensing. 2020; 12(4):657. https://doi.org/10.3390/rs12040657
Chicago/Turabian StyleZhang, Hao, Bing Zhang, Zhiqi Wei, Chenze Wang, and Qiao Huang. 2020. "Lightweight Integrated Solution for a UAV-Borne Hyperspectral Imaging System" Remote Sensing 12, no. 4: 657. https://doi.org/10.3390/rs12040657
APA StyleZhang, H., Zhang, B., Wei, Z., Wang, C., & Huang, Q. (2020). Lightweight Integrated Solution for a UAV-Borne Hyperspectral Imaging System. Remote Sensing, 12(4), 657. https://doi.org/10.3390/rs12040657