Procedural Reconstruction of 3D Indoor Models from Lidar Data Using Reversible Jump Markov Chain Monte Carlo



Abstract
:
1. Introduction
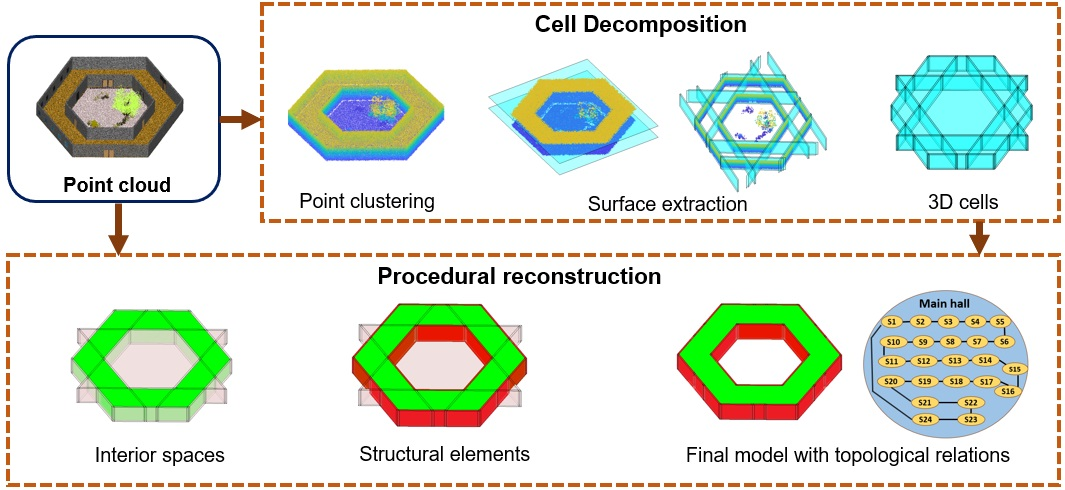
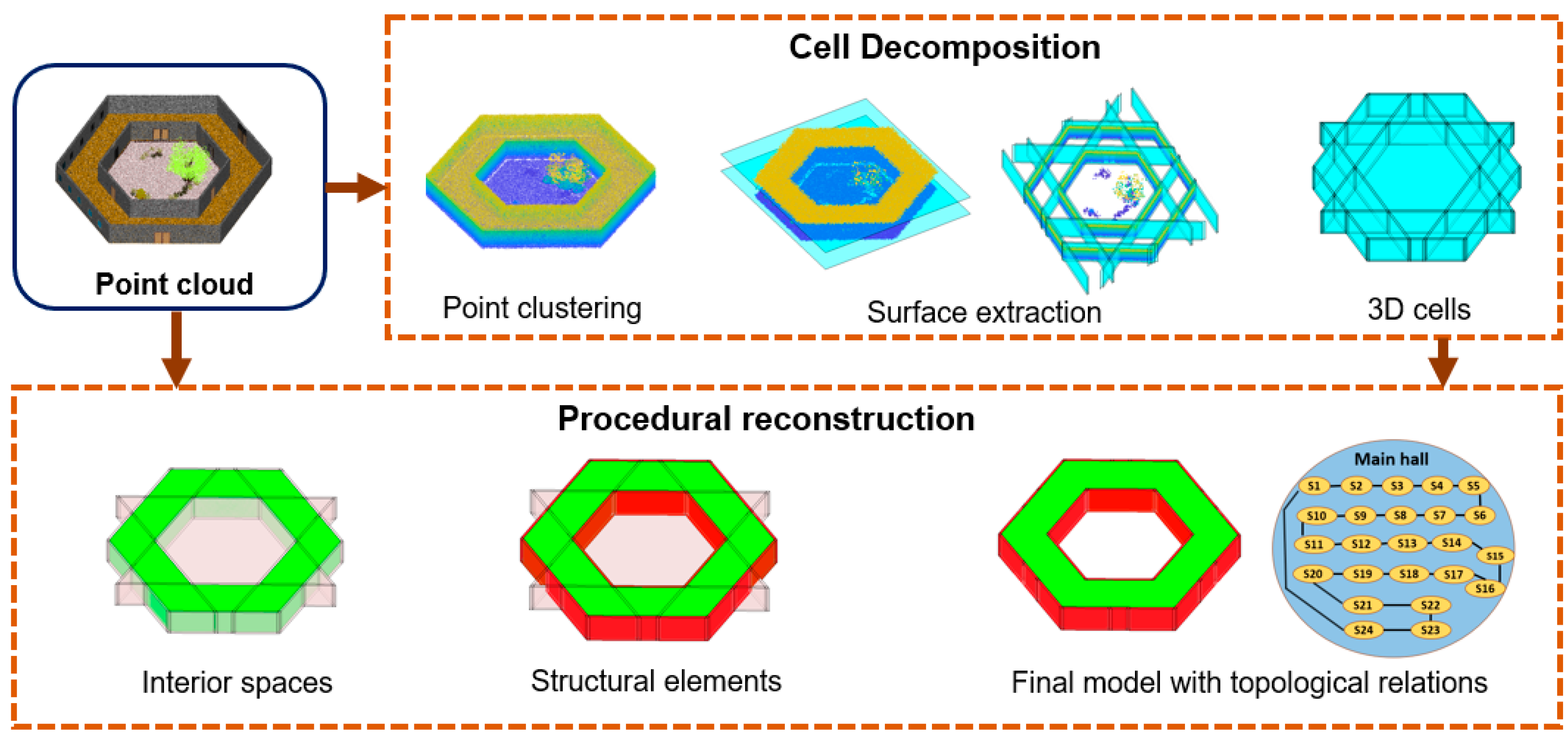
- A new method for procedural reconstruction of a 3D model of an indoor environment based on an integration of a data-driven process with a shape grammar using a stochastic approach, i.e., the rjMCMC.
- A shape grammar with automated application of the grammar rules, which provides the flexibility in modelling different indoor architectures, i.e., Manhattan and non-Manhattan World buildings. The reconstructed models contain not only structural elements (i.e., walls, ceilings, and floors) and interior spaces (i.e., rooms and corridors), but also the topological relations between them.
- An approach to integrating local data properties and global plausibility and constraints of the model at the intermediate states of the model, which enhances the robustness of the reconstruction method to the inherent noise and incompleteness of the data.
2. Related Work
2.1. Data-driven Approaches
2.2. Procedural-based Approaches
3. Reconstruction of 3D Indoor Models
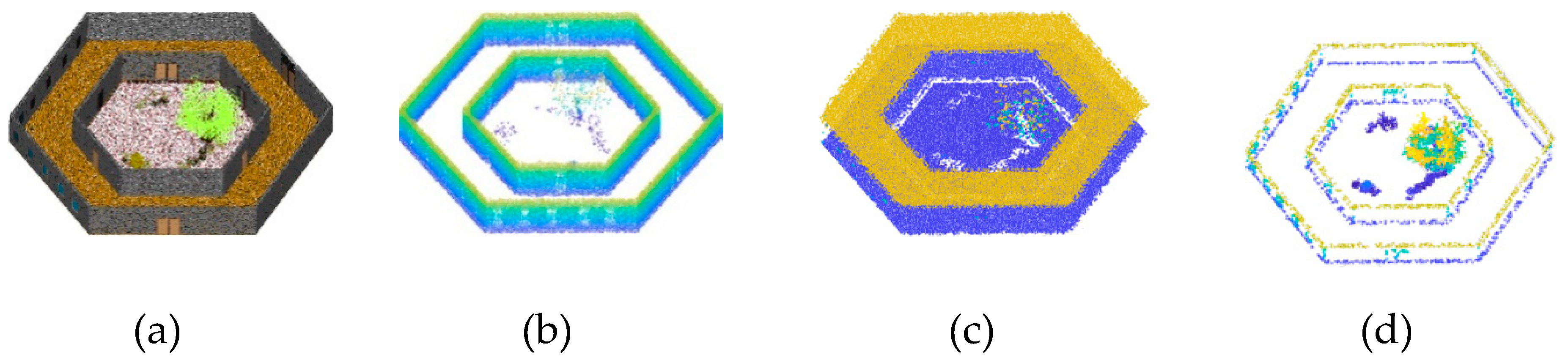
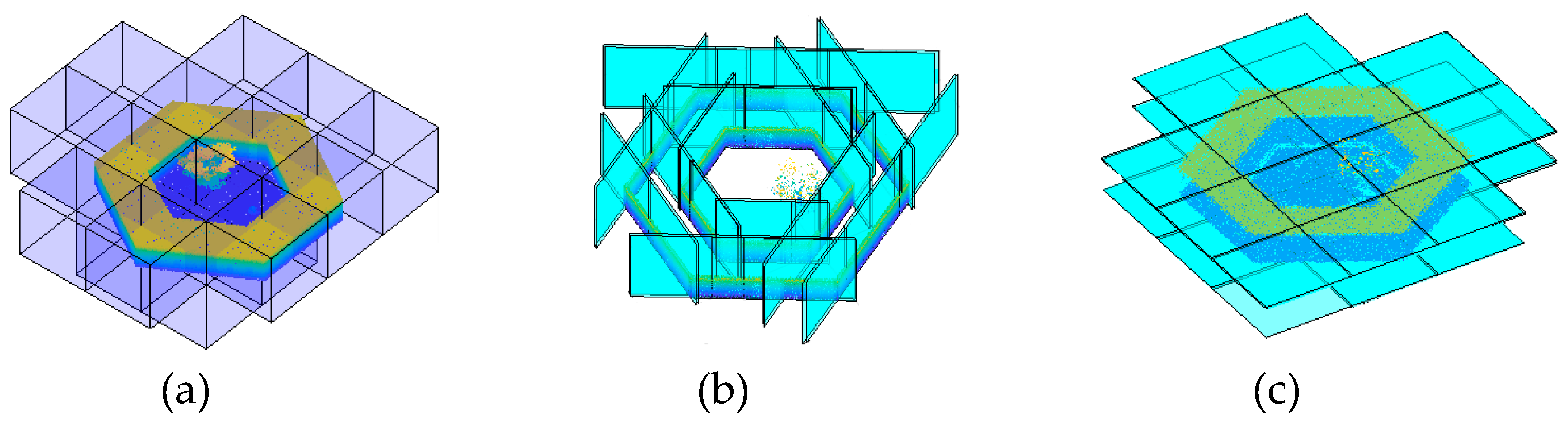
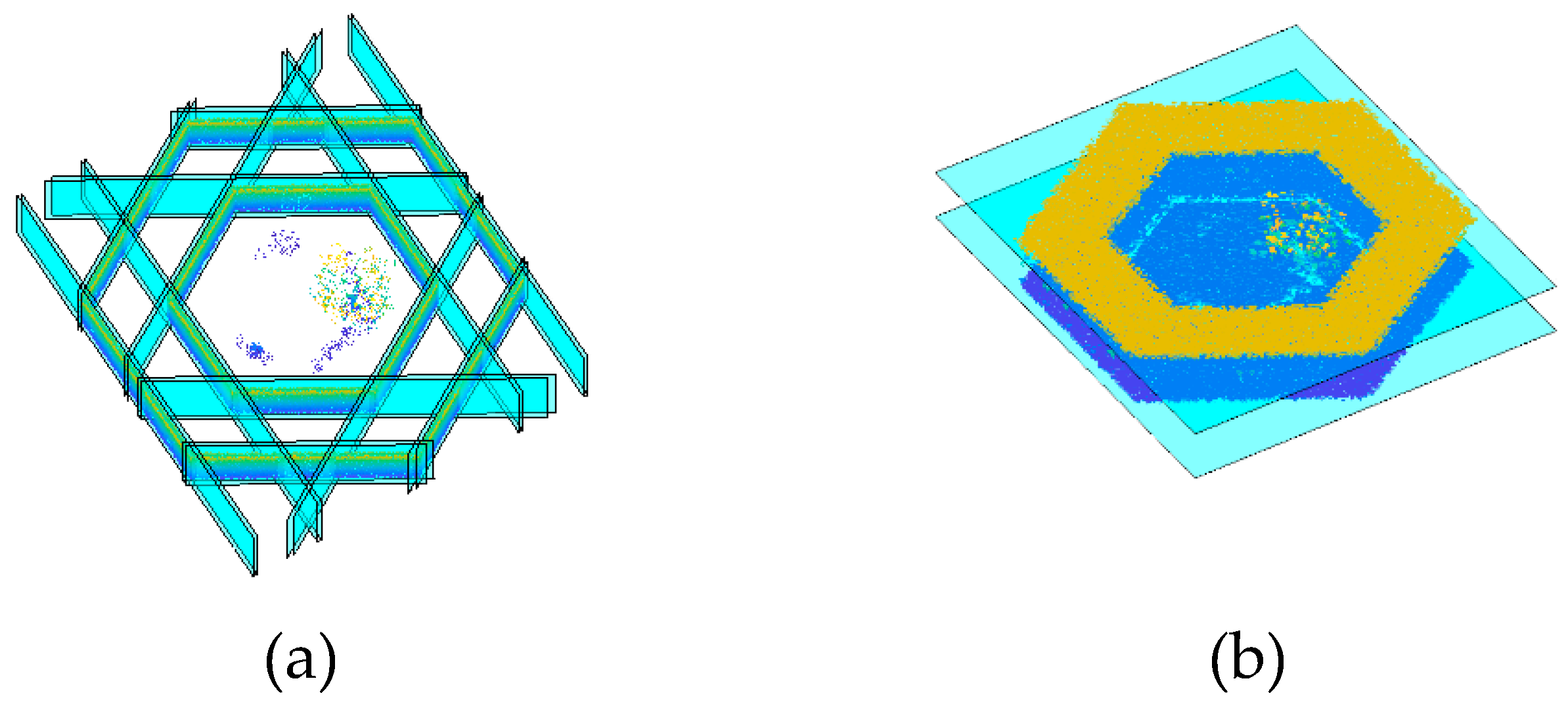
3.1. Space Decomposition
3.2. The Indoor Shape Grammar
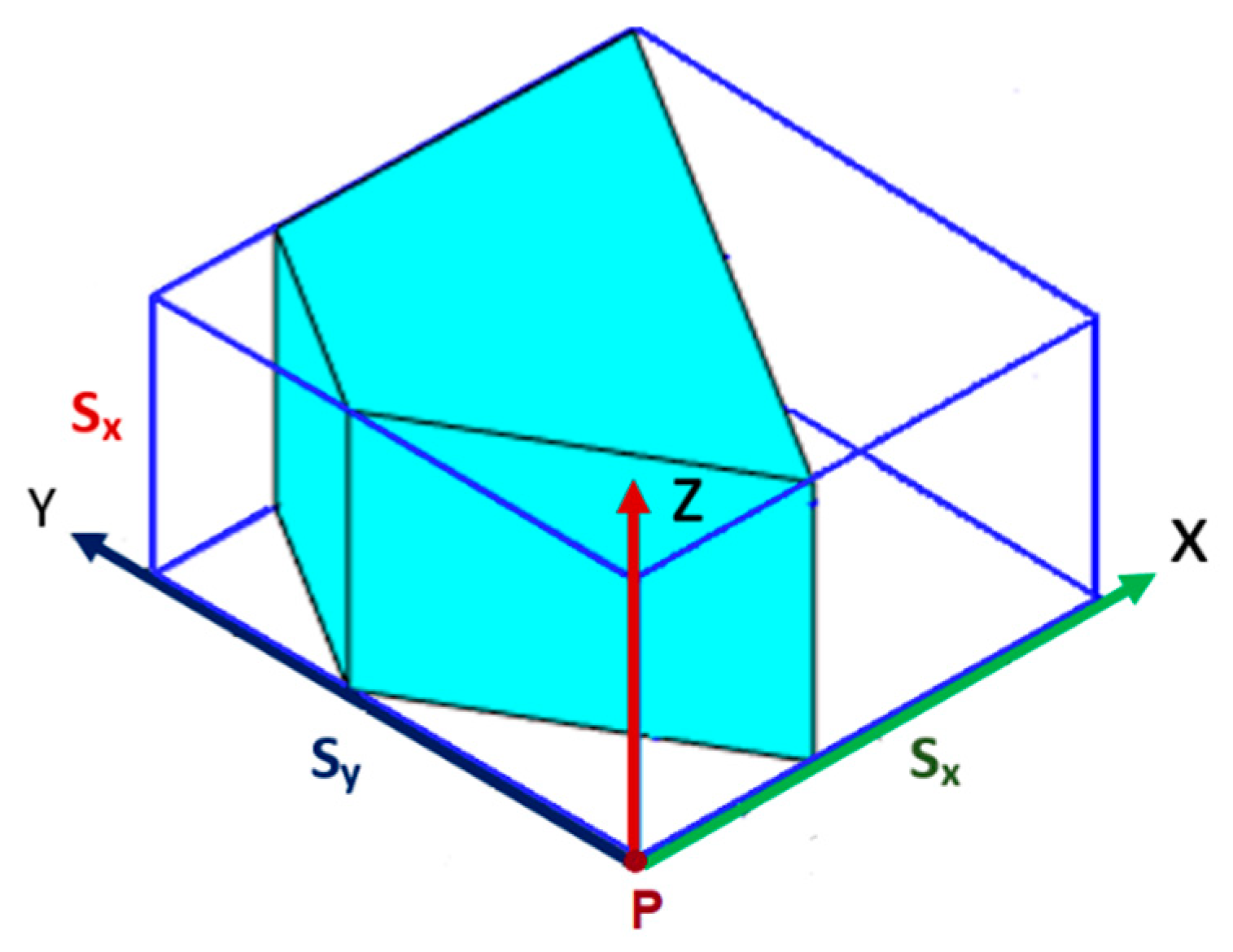
3.2.1. Shapes
3.2.2. Grammar Rules
- (1)
- Place rule:
- (2)
- Merge rule:
- (3)
- Split rule:
- (1)
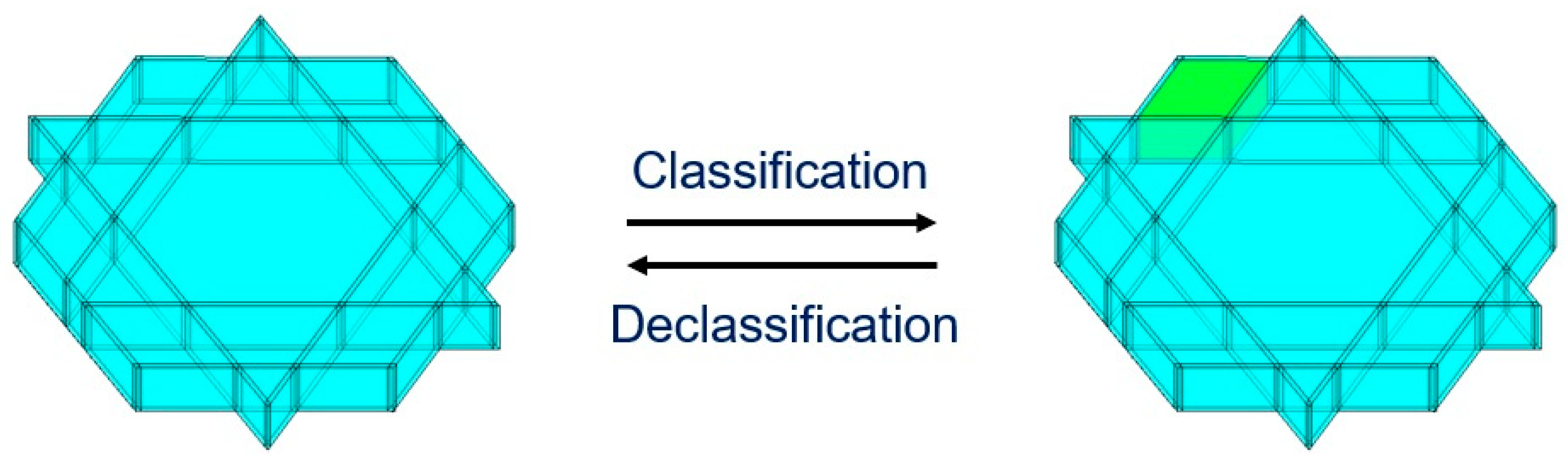
- Classification rule:
- (2)
- Declassification rule:
- (1)
- Adjacency rule
- (2)
- Connectivity rule
- (3)
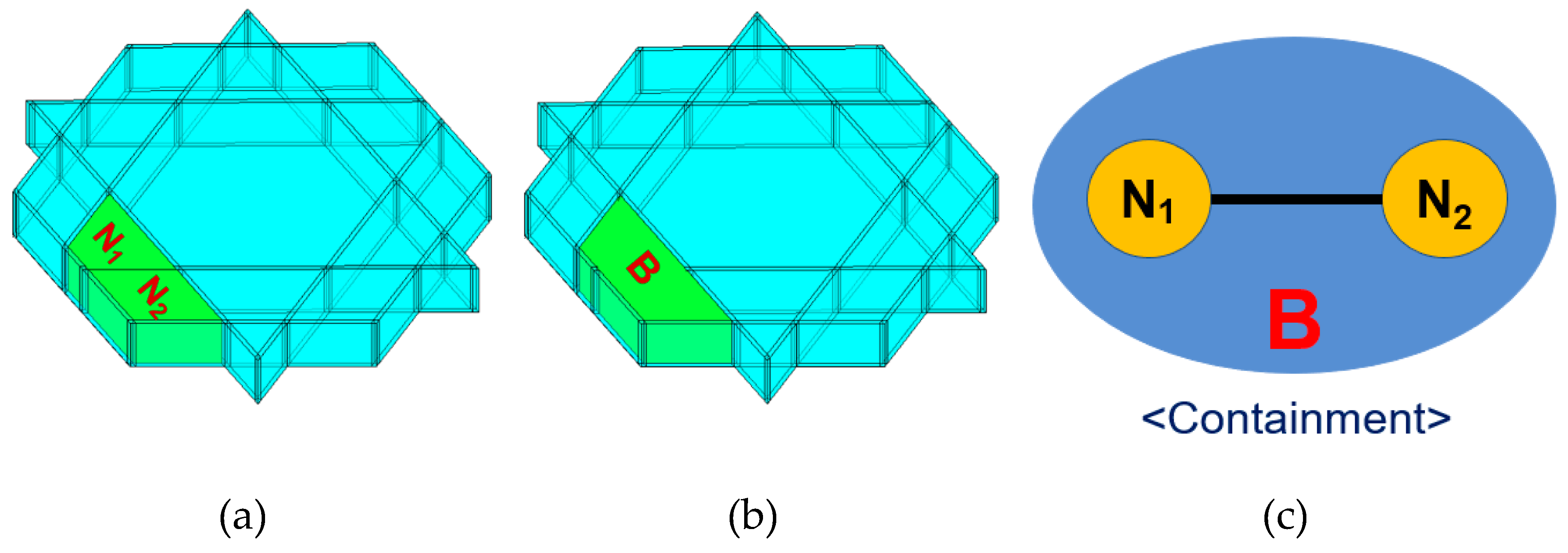
- Containment rule
4. Procedural Model Generation Using rjMCMC
4.1. Model Probability
4.1.1. Prior Probability
4.1.2. Likelihood
4.2. Model Transition
5. Experiments and Results
5.1. Experiments
5.2. Results
5.2.1. Model Reconstruction
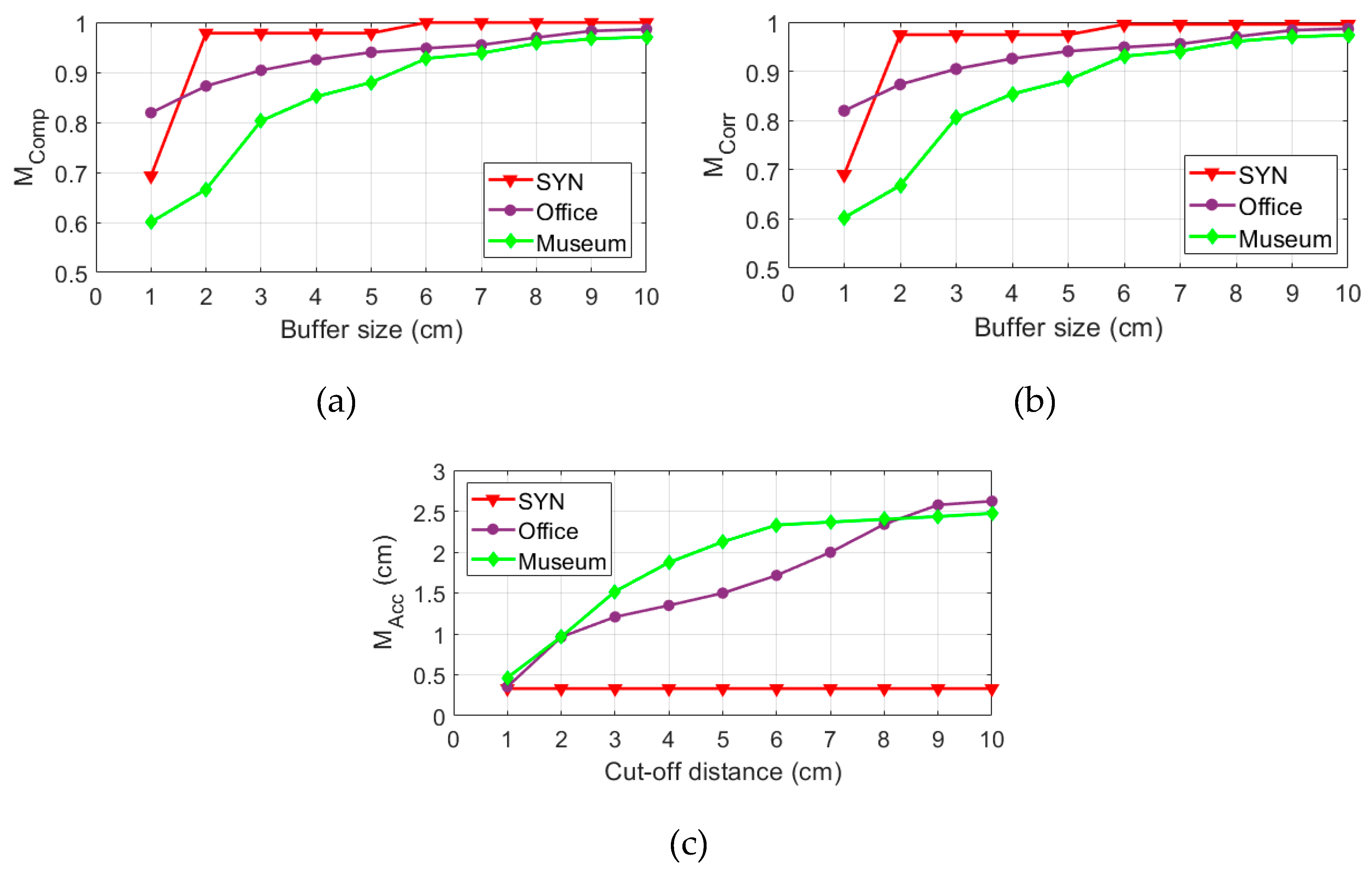
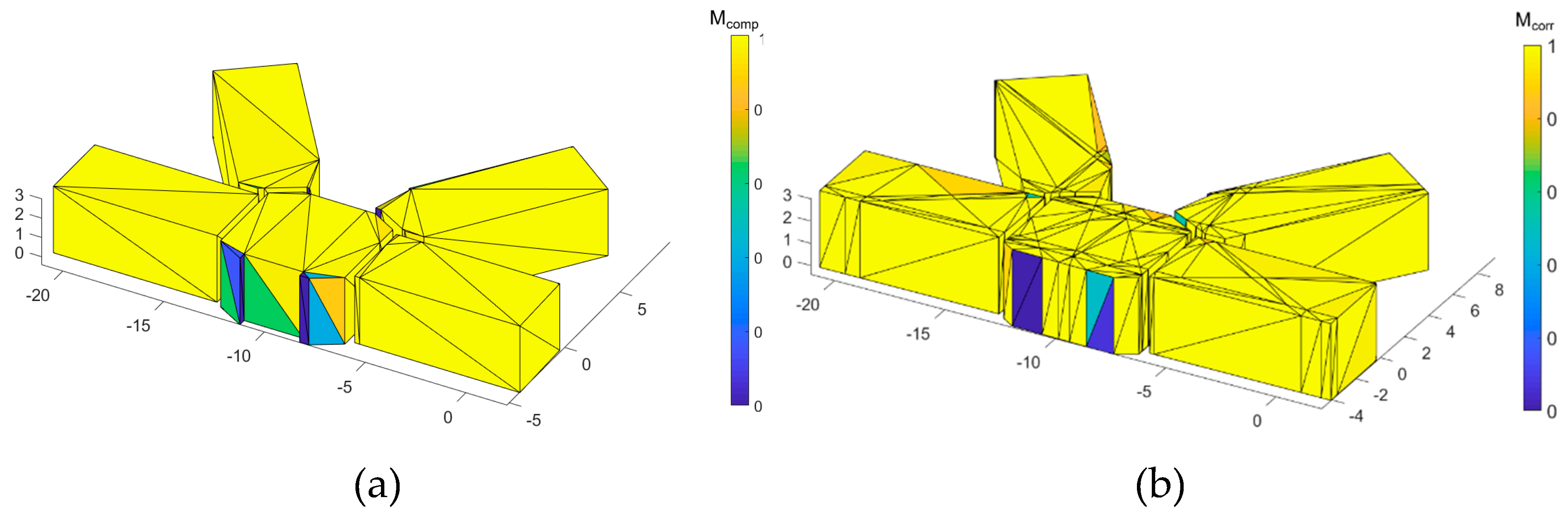
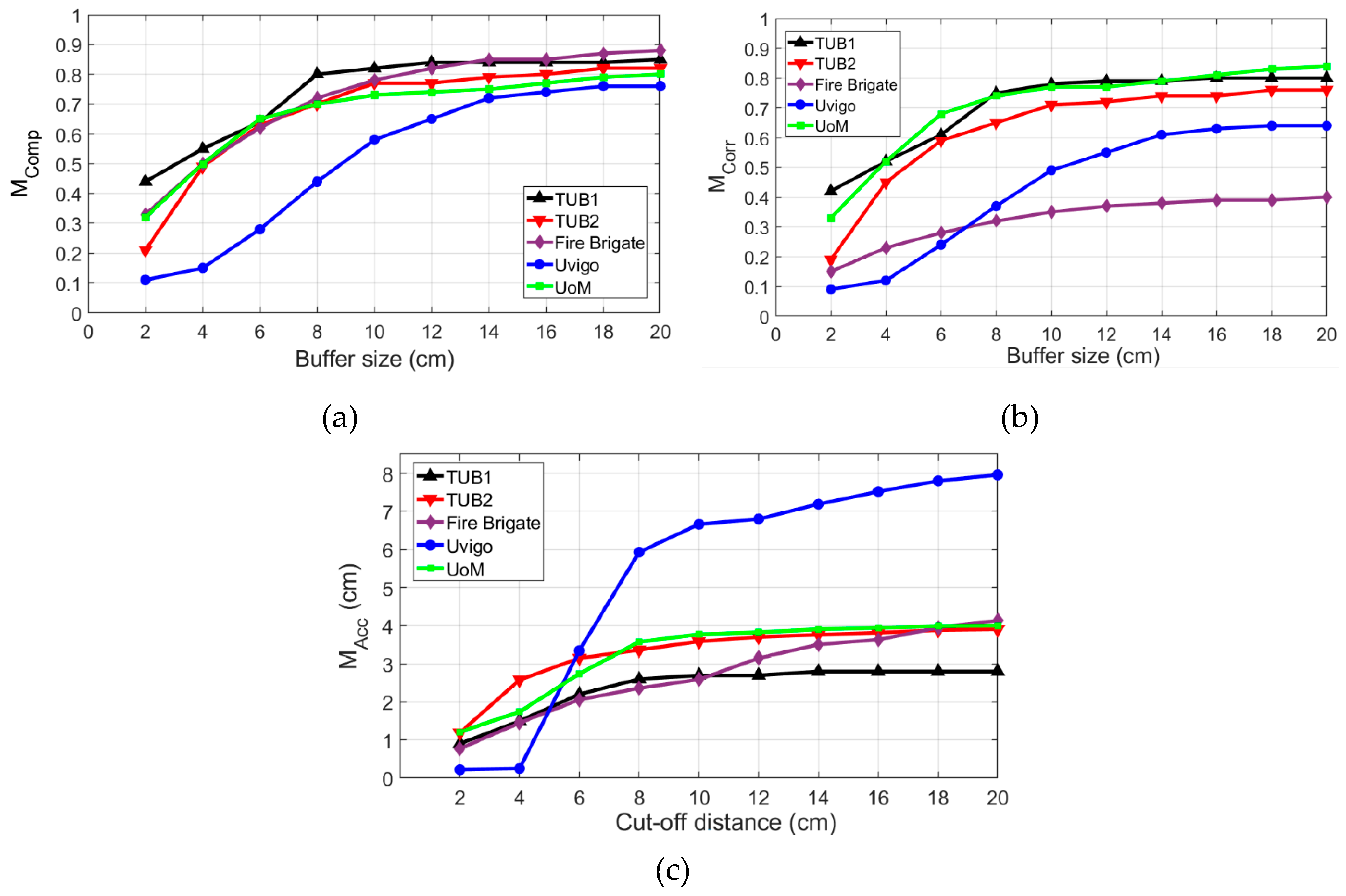
5.2.2. Quality Evaluation
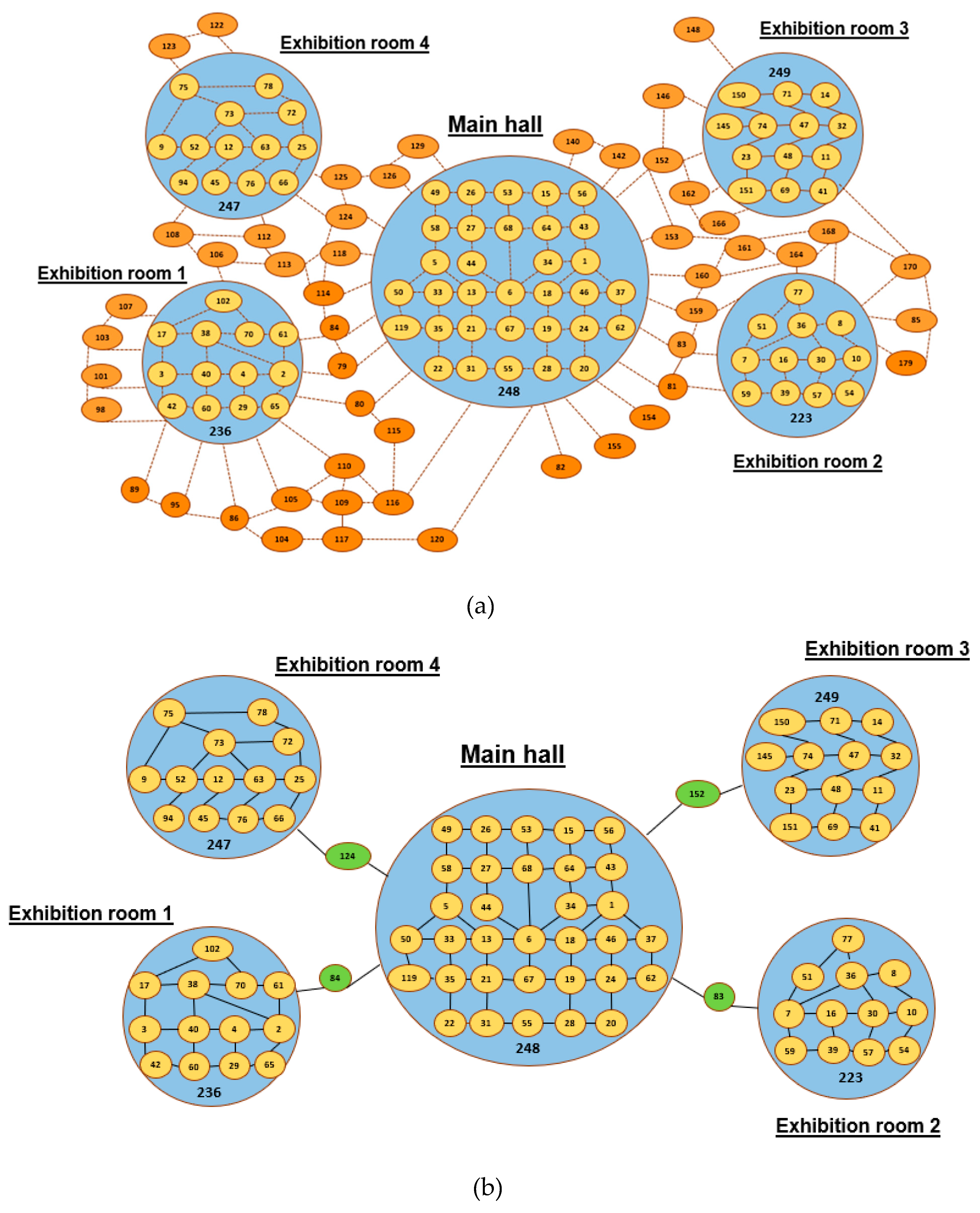
5.2.3. Reconstruction of Topological Relations
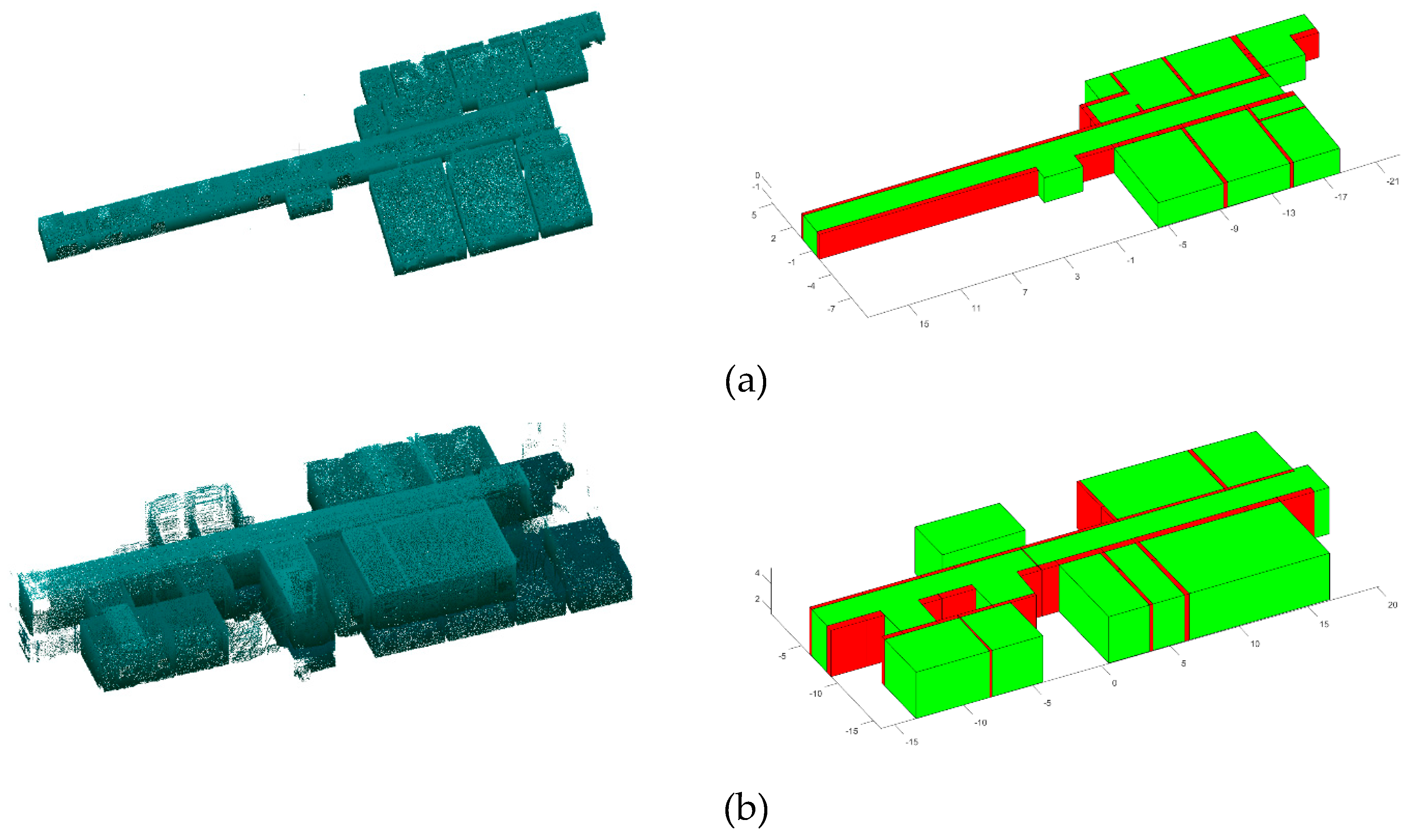
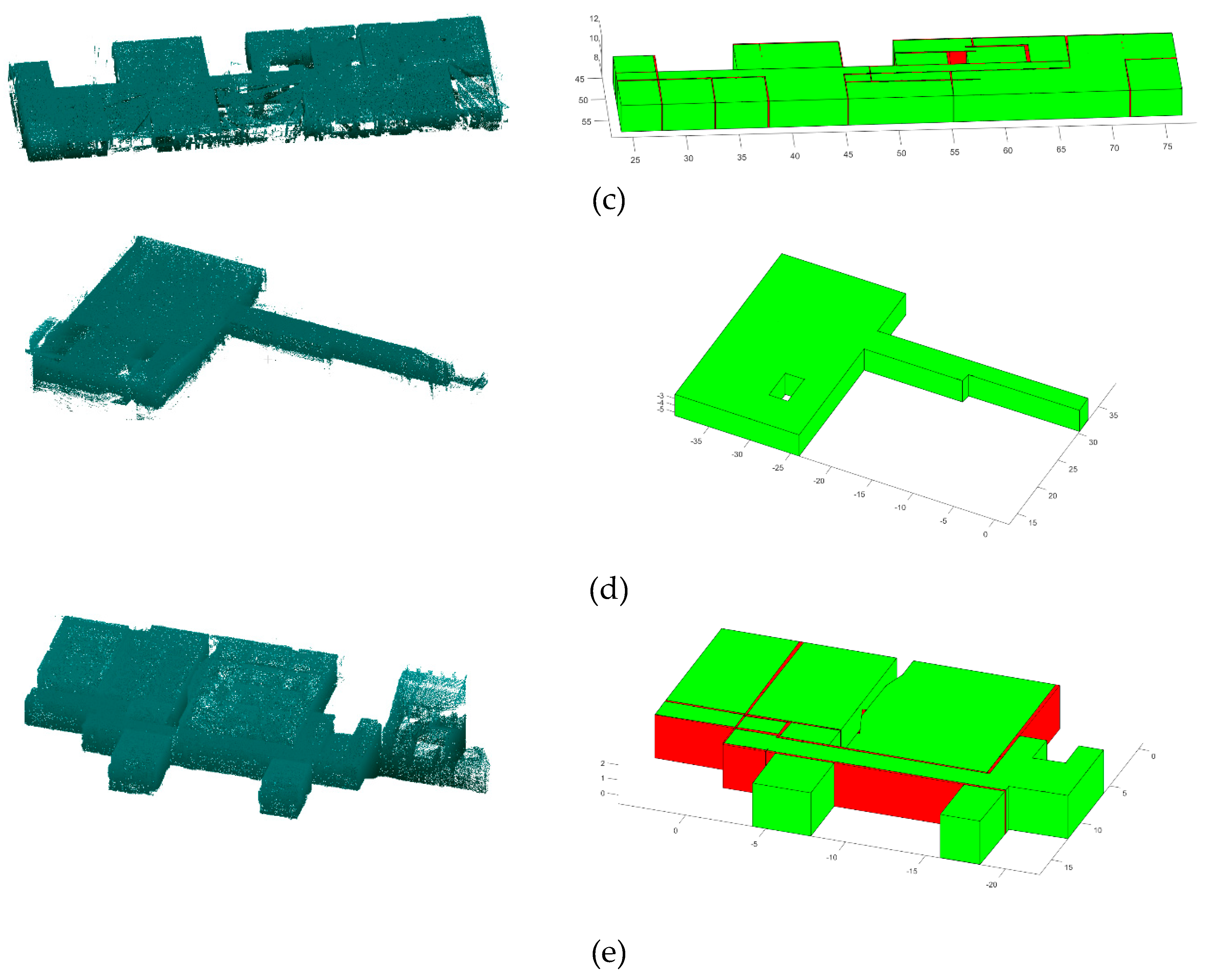
5.2.4. Reconstruction of ISPRS Benchmark Data Set
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pătrăucean, V.; Armeni, I.; Nahangi, M.; Yeung, J.; Brilakis, I.; Haas, C. State of research in automatic as-built modelling. Adv. Eng. Inform. 2015, 29, 162–171. [Google Scholar] [CrossRef] [Green Version]
- Volk, R.; Stengel, J.; Schultmann, F. Building Information Modeling (BIM) for existing buildings—Literature review and future needs. Autom. Constr. 2014, 38, 109–127. [Google Scholar] [CrossRef] [Green Version]
- Tran, H.; Khoshelham, K.; Kealy, A. Geometric comparison and quality evaluation of 3D models of indoor environments. ISPRS J. Photogramm. Remote Sens. 2019, 149, 29–39. [Google Scholar] [CrossRef]
- Mura, C.; Mattausch, O.; Pajarola, R. Piecewise-planar Reconstruction of Multi-room Interiors with Arbitrary Wall Arrangements. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2016; pp. 179–188. [Google Scholar]
- Oesau, S.; Lafarge, F.; Alliez, P. Indoor scene reconstruction using feature sensitive primitive extraction and graph-cut. ISPRS J. Photogramm. Remote Sens. 2014, 90, 68–82. [Google Scholar] [CrossRef] [Green Version]
- Previtali, M.; Scaioni, M.; Barazzetti, L.; Brumana, R. A flexible methodology for outdoor/indoor building reconstruction from occluded point clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 119. [Google Scholar] [CrossRef] [Green Version]
- Thomson, C.; Boehm, J. Automatic geometry generation from point clouds for BIM. Remote Sens. 2015, 7, 11753–11775. [Google Scholar] [CrossRef] [Green Version]
- Tran, H.; Khoshelhama, K. A stochastic approach to automated reconstruction of 3D models of interior spaces from point clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 299–306. [Google Scholar] [CrossRef] [Green Version]
- Gröger, G.; Plümer, L. Derivation of 3D indoor models by grammars for route planning. Photogramm. Fernerkund. Geoinf. 2010, 2010, 191–206. [Google Scholar]
- Khoshelham, K.; Díaz-Vilariño, L. 3D modelling of interior spaces: Learning the language of indoor architecture. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 40, 321. [Google Scholar] [CrossRef] [Green Version]
- Tran, H.; Khoshelham, K.; Kealy, A.; Díaz-Vilariño, L. Shape Grammar Approach to 3D Modeling of Indoor Environments Using Point Clouds. J. Comput. Civ. Eng. 2019, 33, 04018055. [Google Scholar] [CrossRef]
- Becker, S. Generation and application of rules for quality dependent façade reconstruction. ISPRS J. Photogramm. Remote Sens. 2009, 64, 640–653. [Google Scholar] [CrossRef]
- Müller, P.; Wonka, P.; Haegler, S.; Ulmer, A.; Van Gool, L. Procedural modeling of buildings. In ACM SIGGRAPH; ACM: New York, NY, USA, 2006; pp. 614–623. [Google Scholar]
- Wonka, P.; Wimmer, M.; Sillion, F.; Ribarsky, W. Instant architecture. ACM Trans. Graph. (Tog) 2003, 22, 669–677. [Google Scholar] [CrossRef]
- Becker, S.; Peter, M.; Fritsch, D. Grammar-Supported 3D Indoor Reconstruction from Point Clouds for “AS-BUILT” BIM. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 2. [Google Scholar] [CrossRef] [Green Version]
- Metropolis, N.; Rosenbluth, A.W.; Rosenbluth, M.N.; Teller, A.H.; Teller, E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953, 21, 1087–1092. [Google Scholar] [CrossRef] [Green Version]
- Dick, A.R.; Torr, P.H.; Cipolla, R. Modelling and interpretation of architecture from several images. Int. J. Comput. Vis. 2004, 60, 111–134. [Google Scholar] [CrossRef] [Green Version]
- Ripperda, N.; Brenner, C. Application of a formal grammar to facade reconstruction in semiautomatic and automatic environments. In Proceedings of the 12th AGILE Conference on GIScience, Berlin, Germany, 2–5 June 2009; Springer: Berlin, Germany, 2009; pp. 103–157. [Google Scholar]
- Elberink, S.O.; Khoshelham, K. Automatic extraction of railroad centerlines from mobile laser scanning data. Remote Sens. 2015, 7, 5565–5583. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, A.; Lafarge, F.; Brenner, C.; Rottensteiner, F.; Heipke, C. Forest point processes for the automatic extraction of networks in raster data. ISPRS J. Photogramm. Remote Sens. 2017, 126, 38–55. [Google Scholar] [CrossRef] [Green Version]
- Merrell, P.; Schkufza, E.; Koltun, V. Computer-generated residential building layouts. In ACM SIGGRAPH Asia 2010 Papers; ACM: New York, NY, USA, 2010; pp. 1–12. [Google Scholar]
- Adan, A.; Huber, D. 3D reconstruction of interior wall surfaces under occlusion and clutter. In Proceedings of the 2011 International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission, Hangzhou, China, 16–19 May 2011; pp. 275–281. [Google Scholar]
- Díaz-Vilariño, L.; Khoshelham, K.; Martínez-Sánchez, J.; Arias, P. 3D modeling of building indoor spaces and closed doors from imagery and point clouds. Sensors 2015, 15, 3491–3512. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.; Jung, J.; Kim, S.; Cho, H.; Lee, J.; Heo, J. Semi-automated approach to indoor mapping for 3D as-built building information modeling. Comput. Environ. Urban Syst. 2015, 51, 34–46. [Google Scholar] [CrossRef]
- Sanchez, V.; Zakhor, A. Planar 3D modeling of building interiors from point cloud data. In Proceedings of the 2012 19th IEEE International Conference on Image Processing, Orlando, FL, USA, 30 September–3 October 2012; pp. 1777–1780. [Google Scholar]
- Xiong, X.; Adan, A.; Akinci, B.; Huber, D. Automatic creation of semantically rich 3D building models from laser scanner data. Autom. Constr. 2013, 31, 325–337. [Google Scholar] [CrossRef] [Green Version]
- Macher, H.; Landes, T.; Grussenmeyer, P. From point clouds to building information models: 3D semi-automatic reconstruction of indoors of existing buildings. Appl. Sci. 2017, 7, 1030. [Google Scholar] [CrossRef] [Green Version]
- Nikoohemat, S.; Diakité, A.A.; Zlatanova, S.; Vosselman, G. Indoor 3D reconstruction from point clouds for optimal routing in complex buildings to support disaster management. Autom. Constr. 2020, 113, 103109. [Google Scholar] [CrossRef]
- Previtali, M.; Díaz-Vilariño, L.; Scaioni, M. Indoor building reconstruction from occluded point clouds using graph-cut and ray-tracing. Appl. Sci. 2018, 8, 1529. [Google Scholar] [CrossRef] [Green Version]
- Ochmann, S.; Vock, R.; Wessel, R.; Klein, R. Automatic reconstruction of parametric building models from indoor point clouds. Comput. Graph. 2016, 54, 94–103. [Google Scholar] [CrossRef] [Green Version]
- Ochmann, S.; Vock, R.; Klein, R. Automatic reconstruction of fully volumetric 3D building models from oriented point clouds. ISPRS J. Photogramm. Remote Sens. 2019, 151, 251–262. [Google Scholar] [CrossRef] [Green Version]
- Marvie, J.-E.; Perret, J.; Bouatouch, K. The FL-system: A functional L-system for procedural geometric modeling. Vis. Comput. 2005, 21, 329–339. [Google Scholar] [CrossRef]
- Mitchell, W.J. The Logic of Architecture: Design, Computation, and Cognition; MIT Press: Cambridge, MA, USA, 1990. [Google Scholar]
- Parish, Y.I.; Müller, P. Procedural modeling of cities. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 12–17 August 2001; pp. 301–308. [Google Scholar]
- Stiny, G.; Gips, J. Shape grammars and the generative specification of painting and sculpture. In Proceedings of the IFIP Congress (2), Amsterdam, The Netherlands, 23–28 August 1971; pp. 125–135. [Google Scholar]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2007. [Google Scholar]
- Khoshelham, K. Closed-form solutions for estimating a rigid motion from plane correspondences extracted from point clouds. ISPRS J. Photogramm. Remote Sens. 2016, 114, 78–91. [Google Scholar] [CrossRef]
- Agarwal, P.K.; Sharir, M. Arrangements and their applications. In Handbook of Computational Geometry; Elsevier: Amsterdam, The Netherlands, 2000; pp. 49–119. [Google Scholar]
- CGAL. Computational Geometry Algorithms Library. 2019. Available online: http://www.cgal.org (accessed on 15 January 2020).
- Stiny, G. Shape: Talking about Seeing and Doing; MIt Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Hastings, W.K. Monte Carlo sampling methods using Markov chains and their applications. Biometrika 1970, 57, 97–109. [Google Scholar] [CrossRef]
- Tran, H.; Khoshelham, K. Building Change Detection through Comparison of a Lidar Scan with a Building Information Model. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019. [Google Scholar] [CrossRef] [Green Version]
- Edelsbrunner, H.; Mücke, E.P. Three-dimensional alpha shapes. ACM Trans. Graph. 1994, 13, 43–72. [Google Scholar] [CrossRef]
- Rissanen, J. A Universal Prior for Integers and Estimation by Minimum Description Length. Ann. Stat. 1983, 11, 416–431. [Google Scholar] [CrossRef]
- Khoshelham, K.; Vilariño, L.D.; Peter, M.; Kang, Z.; Acharya, D. The ISPRS benchmark on indoor modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2017, 42, 367–372. [Google Scholar] [CrossRef] [Green Version]
- ISPRS Initiative, ISPRS Benchmark on Indoor Modelling. 2020. Available online: http://www2.isprs.org/commissions/comm4/wg5/benchmark-test-on-indoor-modelling.html (accessed on 15 January 2020).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. (Year) | Non-Manhattan | Volumetric walls | Volumetric spaces | Topological relations |
|---|---|---|---|---|
| [4] Mura et al. (2016) | Yes | No | No | No |
| [5] Oesau et al. (2014) | Yes | No | No | No |
| [9] Gröger and Plümer (2010) | No | No | Yes | Yes |
| [10] Khoshelham and Díaz-Vilariño (2014) | No | No | Yes | No |
| [11] Tran et al. (2019) | No | Yes | Yes | Yes |
| [15] Becker et al. (2015) | No | Yes | No | No |
| [26] Xiong et al. (2013) | No | No | No | No |
| [27] Macher et al. (2017) | No | Yes | No | No |
| [28] Nikoohemat et al. (2020) | Yes | Yes | Yes | No |
| [30] Ochmann et al. (2016) | Yes | Yes | No | No |
| [31] Ochmann et al. (2019) | Yes | Yes | No | No |
| Ours | Yes | Yes | Yes | Yes |
| Parameters Data Set | Max wall Thickness (m) | Voxel Size (m) | Convergence Factor | Normalization Factors | |||||
|---|---|---|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | |||||||
| SYN | 0.3 | 5.0 | 0.0 | 1/3 | 1/3 | 1/3 | 1.0 | 0.8 | 0.9 |
| Office | 0.3 | 3.0 | 0.2 | 1/3 | 1/3 | 1/3 | 1.0 | 0.8 | 0.9 |
| Museum | 0.4 | 3.0 | 0.1 | 1/3 | 1/3 | 1/3 | 1.0 | 0.8 | 0.9 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, H.; Khoshelham, K. Procedural Reconstruction of 3D Indoor Models from Lidar Data Using Reversible Jump Markov Chain Monte Carlo. Remote Sens. 2020, 12, 838. https://doi.org/10.3390/rs12050838
Tran H, Khoshelham K. Procedural Reconstruction of 3D Indoor Models from Lidar Data Using Reversible Jump Markov Chain Monte Carlo. Remote Sensing. 2020; 12(5):838. https://doi.org/10.3390/rs12050838
Chicago/Turabian StyleTran, Ha, and Kourosh Khoshelham. 2020. "Procedural Reconstruction of 3D Indoor Models from Lidar Data Using Reversible Jump Markov Chain Monte Carlo" Remote Sensing 12, no. 5: 838. https://doi.org/10.3390/rs12050838
APA StyleTran, H., & Khoshelham, K. (2020). Procedural Reconstruction of 3D Indoor Models from Lidar Data Using Reversible Jump Markov Chain Monte Carlo. Remote Sensing, 12(5), 838. https://doi.org/10.3390/rs12050838