Copernicus Global Land Cover Layers—Collection 2

 , , ,
, , ,
Abstract
:
1. Introduction
2. Methodological Overview
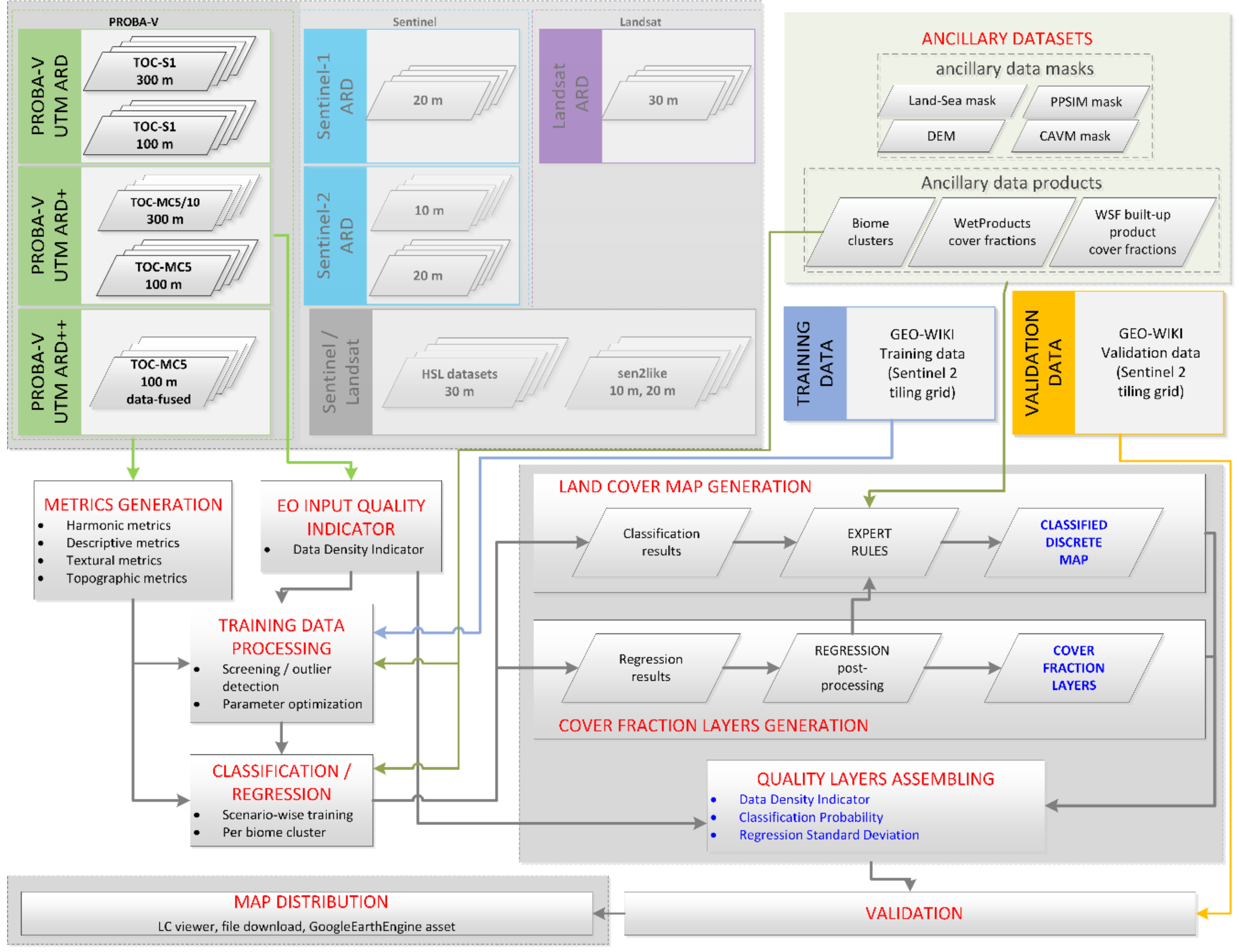
2.1. General Overview
2.2. EO Data Pre-Processing
2.3. Classification/Regression Pre-Processing
2.4. Classification/Regression and Product Generation
2.5. Validation and Comparison
3. The CGLS-LC100 Product and Accuracy Assessment
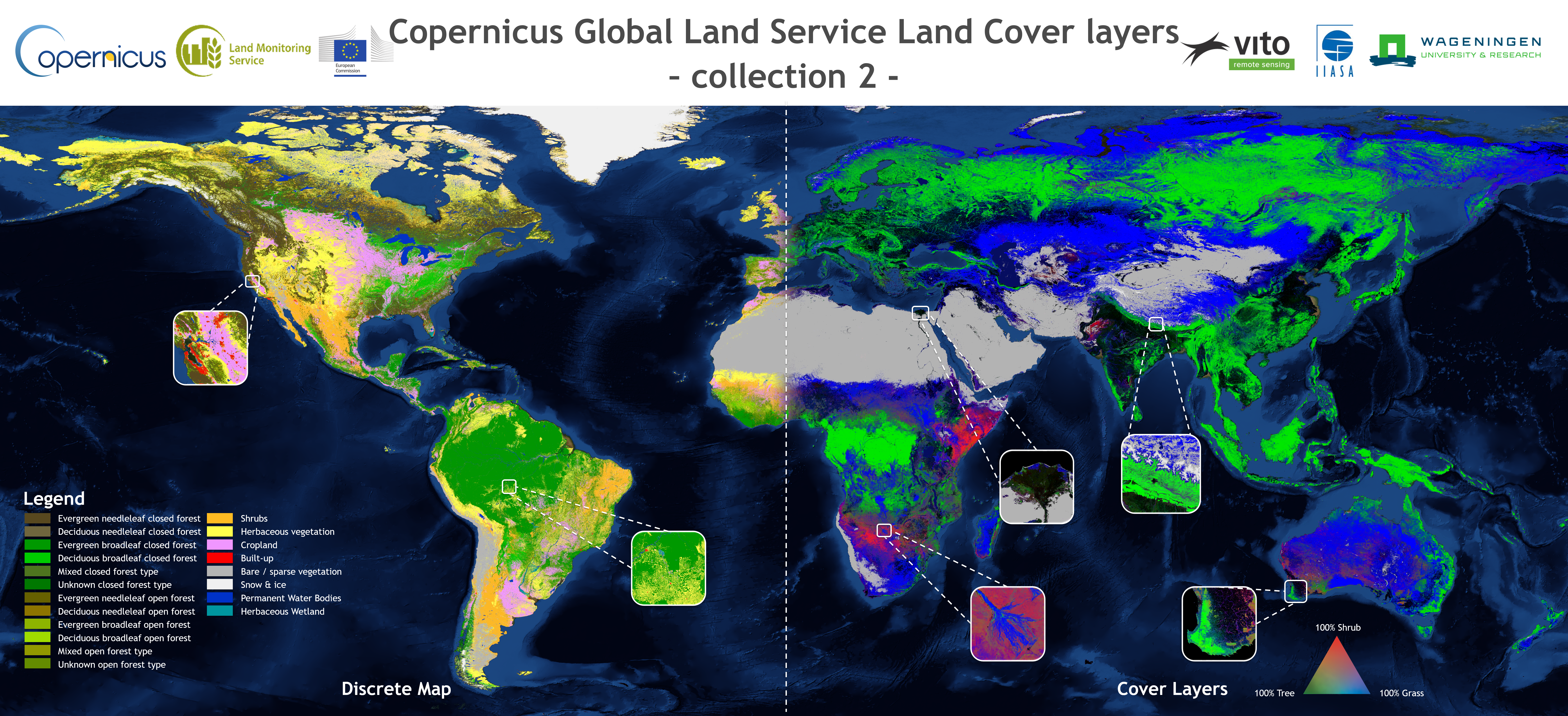
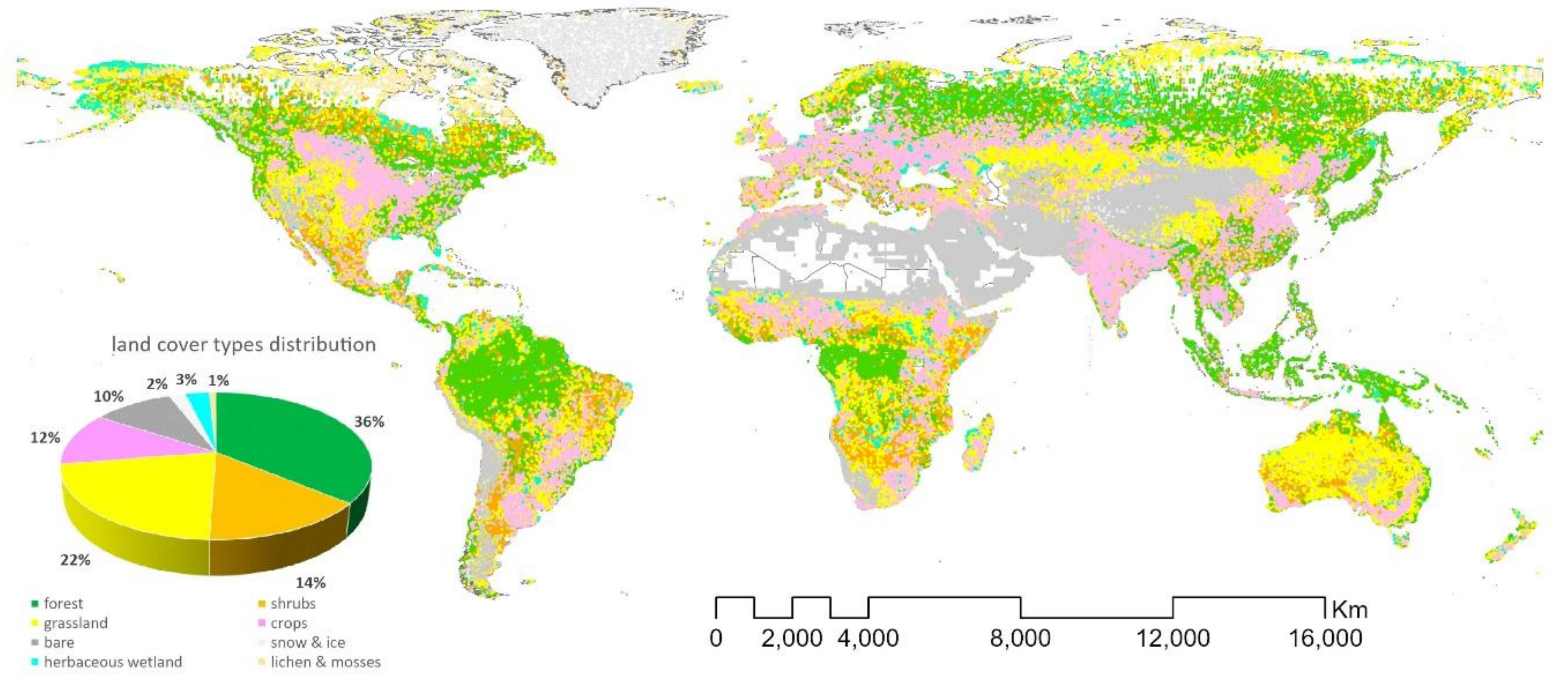
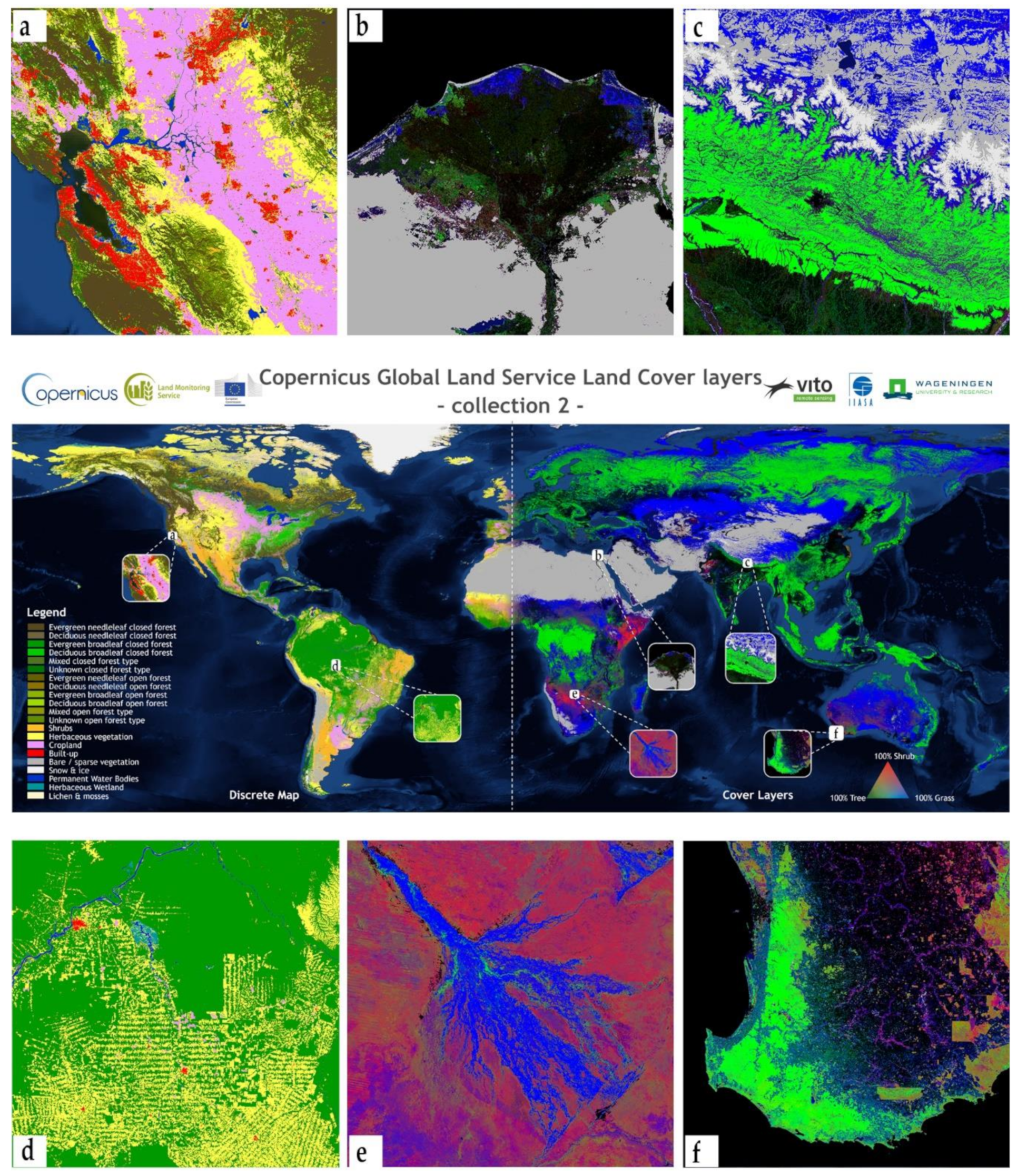
3.1. Global Discrete Map and Cover Fraction Layers
3.2. Quality Indicators
- DDI: The Data Density Indicator indicates the availability of input data from the PROBA-V UTM ARD+ MC5 archive for 100 m and 300 m resolutions. It is a score between 0 = no input data available and 100 = best data availability. Overall, 19 single time-series statistics are calculated and combined via a scoring approach into the DDI. For more details see the ATBD [25].
- Discrete class probability: The probability of the discrete classification indicates the quality of the discrete classification and is provided as a number between 0 and 100, in steps of 1%. The class probability is calculated pixel-wise using the RF model and scoring the classification trees within the RF forest. The higher the probability, the more confident we are that the given class is correct.
- Cover fraction standard deviation: The standard deviation of the percentage cover regression indicates the quality of the associated cover fraction layer. It is provided as a number between 0 and 100, in steps of 1%. This indicator is given only for the six classes calculated by the CGLS-LC100 workflow (tree, shrubland, herbaceous vegetation, cropland, moss and lichen, and bare/spare vegetation). The standard deviation is calculated pixel-wise over the single regression results of the trees within the RF forest. The lower the standard deviation for a class in a pixel, the higher the confidence that the result is correct.
3.3. Accuracy Assessment
3.4. Quantitative Comparison of CGLS-LC100 and Existing Global LC Datasets
4. Data Access Channels
- The LC layers are available for viewing through the Global Land Cover viewer, available at https://land.copernicus.eu/global/lcviewer. It displays the various LC layers (discrete map, cover fractions, false-color combinations of cover fractions) on a map, allows us to download the data in 20x20 degree tiles in the EPSG:4326 projection and reports on LC statistics per administrative area.
- All products are uploaded on the Zenodo platform for long-term archiving and assigned a concept DOI as well as a version DOI. The concept DOI will resolve all the time into the newest collection of the dataset. Moreover, the single layers of the CGLS-LC100 product can be downloaded as single global files in the ESPG:4326 projection (Table 5).
- All products were ingested into the Google Earth Engine Data Catalog – so now the access through the Google Earth Engine (GEE) offers on-demand analyses, visualization and data download in Pseudo-Mercator projection for customized boundary boxes. Search for the term “Copernicus Global Land Cover Layers: CGLS-LC100 Collection 2” in the GEE Data Catalog.
- The product is also available through the Geo-Wiki engagement platform available at https://www.geo-wiki.org/. The user can compare the CGLS-LC100 product with other global and continental LC products as well as provide feedback or help to collect additional training points for the next collection of the product.
- More information and documentation about the CGLS-LC100 product is available from the Copernicus Global Land Service web site at https://land.copernicus.eu/global/products/lc as well as accessible through the "Copernicus Global Land Service: product documentation" community on the Zenodo platform at https://zenodo.org/communities/copernicus-land-product-documents/
5. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lambin, E.F.; Meyfroidt, P. Global land use change, economic globalization, and the looming land scarcity. Proc. Natl. Acad. Sci. USA 2011, 108, 3465–3472. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tesfaw, A.T.; Pfaff, A.; Kroner, R.E.G.; Qin, S.Y.; Medeiros, R.; Mascia, M.B. Land-use and land-cover change shape the sustainability and impacts of protected areas. Proc. Natl. Acad. Sci. USA 2018, 115, 2084–2089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cherlet, M.; Hutchinson, C.; Reynolds, J.; Hill, J.; Sommer, S.; von Maltitz, G. World Atlas of Desertification, 3rd ed.; Publication Office of the European Union: Luxembourg, 2018. [Google Scholar] [CrossRef]
- Fensholt, R.; Rasmussen, K.; Kaspersen, P.; Huber, S.; Horion, S.; Swinnen, E. Assessing Land Degradation/Recovery in the African Sahel from Long-Term Earth Observation Based Primary Productivity and Precipitation Relationships. Remote Sens. 2013, 5, 664–686. [Google Scholar] [CrossRef] [Green Version]
- Pedelty, J.; Devadiga, S.; Masuoka, E.; Brown, M.; Pinzon, J.; Tucker, C.; Roy, D.; Ju, J.C.; Vermote, E.; Prince, S.; et al. Generating a Long-term Land Data Record from the AVHRR and MODIS instruments. Int. Geosci. Remote Sens. Symp. 2007, 1021–1024. [Google Scholar] [CrossRef]
- Ju, J.C.; Masek, J.G. The vegetation greenness trend in Canada and US Alaska from 1984–2012 Landsat data. Remote Sens. Environ. 2016, 176, 1–16. [Google Scholar] [CrossRef]
- Vogelmann, J.E.; Gallant, A.L.; Shi, H.; Zhu, Z. Perspectives on monitoring gradual change across the continuity of Landsat sensors using time-series data. Remote Sens. Environ. 2016, 185, 258–270. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G.; Gu, J.Y.; Yadav, K.; Thenkabail, P.; Ozdogan, M. Global Land Cover Mapping: A Review and Uncertainty Analysis. Remote Sens. 2014, 6, 12070–12093. [Google Scholar] [CrossRef] [Green Version]
- Grekousis, G.; Mountrakis, G.; Kavouras, M. An overview of 21 global and 43 regional land-cover mapping products. Int. J. Remote Sens. 2015, 36, 5309–5335. [Google Scholar] [CrossRef]
- Arino, O.; Gross, D.; Ranera, F.; Leroy, M.; Bicheron, P.; Brockman, C.; Defourny, P.; Vancutsem, C.; Achard, F.; Durieux, L.; et al. GlobCover ESA service for Global land cover from MERIS. Int. Geosci. Remote Sens. Symp. 2007. [Google Scholar] [CrossRef]
- Defourny, P.; Kirches, G.; Brockmann, C.; Boettcher, M.; Peters, M.; Bontemps, S.; Lamarche, C.; Schlerf, M.; Santoro, M. Land Cover CCI: Product User Guide Version 2. UCL-Geomatics: Ottignies-Louvain-la-Neuve, Belgium, 2015. [Google Scholar]
- Sulla-Menashe, D.; Gray, J.M.; Abercrombie, S.P.; Friedl, M.A. Hierarchical mapping of annual global land cover 2001 to present: The MODIS Collection 6 Land Cover product. Remote Sens. Environ. 2019, 222, 183–194. [Google Scholar] [CrossRef]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S.; et al. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef] [Green Version]
- Wulder, M.A.; Coops, N.C.; Roy, D.P.; White, J.C.; Hermosilla, T. Land cover 2.0. Int. J. Remote Sens. 2018, 39, 4254–4284. [Google Scholar] [CrossRef] [Green Version]
- Buchhorn, M.; Smets, B.; Bertels, L.; Lesiv, M.; Tsendbazar, N.E.; Herold, M.; Fritz, S. Copernicus Global Land Service: Land Cover 100m: Epoch 2015: Globe; (Version V2.0.2); Zenodo: Geneve, Switzerland, 2019. [Google Scholar] [CrossRef]
- Francois, M.; Santandrea, S.; Mellab, K.; Vrancken, D.; Versluys, J. The PROBA-V mission: The space segment. Int. J. Remote Sens. 2014, 35, 2548–2564. [Google Scholar] [CrossRef]
- Dierckx, W.; Sterckx, S.; Benhadj, I.; Livens, S.; Duhoux, G.; Van Achteren, T.; Francois, M.; Mellab, K.; Saint, G. PROBA-V mission for global vegetation monitoring: Standard products and image quality (vol 35, pg 2589, 2014). Int. J. Remote Sens. 2016, 37, 1973. [Google Scholar] [CrossRef] [Green Version]
- Zhai, Y.G.; Qu, Z.Y.; Hao, L. Land Cover Classification Using Integrated Spectral, Temporal, and Spatial Features Derived from Remotely Sensed Images. Remote Sens. 2018, 10. [Google Scholar] [CrossRef] [Green Version]
- Eberenz, J.; Verbesselt, J.; Herold, M.; Tsendbazar, N.E.; Sabatino, G.; Rivolta, G. Evaluating the Potential of PROBA-V Satellite Image Time Series for Improving LC Classification in Semi-Arid African Landscapes. Remote Sens. 2016, 8. [Google Scholar] [CrossRef] [Green Version]
- Tsendbazar, N.E.; Herold, M.; de Bruin, S.; Lesiv, M.; Fritz, S.; Van De Kerchove, R.; Buchhorn, M.; Duerauer, M.; Szantoi, Z.; Pekel, J.F. Developing and applying a multi-purpose land cover validation dataset for Africa. Remote Sens. Environ. 2018, 219, 298–309. [Google Scholar] [CrossRef] [Green Version]
- Nabil, M.; Zhang, M.; Bofana, J.; Wu, B.; Stein, A.; Dong, T.; Zeng, H.; Shang, J. Assessing factors impacting the spatial discrepancy of remote sensing based cropland products: A case study in Africa. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 102010. [Google Scholar] [CrossRef]
- Xu, Y.; Yu, L.; Feng, D.; Peng, D.; Li, C.; Huang, X.; Lu, H.; Gong, P. Comparisons of three recent moderate resolution African land cover datasets: CGLS-LC100, ESA-S2-LC20, and FROM-GLC-Africa30. Int. J. Remote Sens. 2019, 40, 6185–6202. [Google Scholar] [CrossRef]
- Pérez-Hoyos, A.; Udías, A.; Rembold, F. Integrating multiple land cover maps through a multi-criteria analysis to improve agricultural monitoring in Africa. Int. J. Appl. Earth Obs. Geoinf. 2020, 88, 102064. [Google Scholar] [CrossRef]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L. Best practices for the reprojection and resampling of Sentinel-2 Multi Spectral Instrument Level 1C data. Remote Sens. Lett. 2016, 7, 1023–1032. [Google Scholar] [CrossRef]
- Buchhorn, M.; Bertels, L.; Smets, B.; Lesiv, M.; Tsendbazar, N.E. Copernicus Global Land Service: Land Cover 100m: Version 2 Globe 2015: Algorithm Theoretical Basis Document; Zenodo: Geneve, Switzerland, 1 January 2019. [Google Scholar] [CrossRef]
- FAO. WaPOR, FAO’s Portal to Monitor Water Productivity through Open access of Remotely Sensed Derived Data. Available online: https//wapor.apps.fao.org/ (accessed on 11 February 2020).
- Souverijns, N.; Buchhorn, M.; Van De Kerchove, R.; Horion, S.; Brandt, M.; Fensholt, R. 30 years of consistent land use and land cover changes over the Sahel for the full Landsat era. Remote Sens. in preparation.
- Dwyer, J.L.; Roy, D.P.; Sauer, B.; Jenkerson, C.B.; Zhang, H.K.K.; Lymburner, L. Analysis Ready Data: Enabling Analysis of the Landsat Archive. Remote Sens. 2018, 10. [Google Scholar] [CrossRef]
- ESA. Sentinel-2 Tiling Grid Dataset; European Space Agency; Sentinel program, Ed.; European Space Agency, ESRIN: Rome, Italy, 2018. [Google Scholar]
- Roerink, G.J.; Menenti, M.; Verhoef, W. Reconstructing cloudfree NDVI composites using Fourier analysis of time series. Int. J. Remote Sens. 2000, 21, 1911–1917. [Google Scholar] [CrossRef]
- Walker, H.M. Studies in the History of Statistical Method: With Special Reference to Certain Educational Problems. Williams & Wilkins Co: Baltimore, MD, USA, 1929; p. 24. [Google Scholar]
- Verhoef, W. Application of Harmonic Analysis of NDVI Time Series (HANTS). In Fourier Analysis of Temporal NDVI in the Southern African and American Continents; Azzali, S.M., Ed.; DLO Winand Staring Centre: Wageningen, The Netherlands, 1996; Volume 108, pp. 19–24. [Google Scholar]
- Sedano, F.; Kempeneers, P.; Hurtt, G. A Kalman filter-based method to generate continuous time series of medium-resolution NDVI images. Remote Sens. 2014, 6, 12381–12408. [Google Scholar] [CrossRef] [Green Version]
- Kempeneers, P.; Sedano, F.; Piccard, I.; Eerens, H. Data Assimilation of PROBA-V 100 and 300 m. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3314–3325. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Marconcini, M.; Metz-Marconcini, A.; Üreyen, S.; Palacios-Lopez, D.; Hanke, W.; Bachofer, F.; Zeidler, J.; Esch, T.; Gorelick, N.; Kakarla, A.; et al. Outlining where humans live—The World Settlement Footprint 2015. arXiv 2019, arXiv:1910.12707. [Google Scholar]
- Fritz, S.; McCallum, I.; Schill, C.; Perger, C.; See, L.; Schepaschenko, D.; van der Velde, M.; Kraxner, F.; Obersteiner, M. Geo-Wiki: An online platform for improving global land cover. Environ. Modell. Softw. 2012, 31, 110–123. [Google Scholar] [CrossRef]
- Di Gregorio, A.; Food and Agriculture Organization of the United Nations; United Nations Environment Programme. Land Cover Classification System: Classification Concepts and User Manual: LCCS, Software, 2nd ed.; Food and Agriculture Organization of the United Nations : Rome, Italy, 2005; 190p. [Google Scholar]
- Tsendbazar, N.E.; Herold, M.; Lesiv, M.; Fritz, S. Copernicus Global Land Service: Land Cover 100m: Version 2 Globe 2015: Validation Report; Zenodo: Geneve, Switzerland, 2019. [Google Scholar] [CrossRef]
- Tsendbazar, N.E.; de Bruin, S.; Mora, B.; Schouten, L.; Herold, M. Comparative assessment of thematic accuracy of GLC maps for specific applications using existing reference data. Int. J. Appl. Earth Obs. Geoinf. 2016, 44, 124–135. [Google Scholar] [CrossRef]
- Buchhorn, M.; Smets, B.; Bertels, L.; Lesiv, M.; Tsendbazar, N.E.; li, L. Copernicus Global Land Service: Land Cover 100m: Version 2 Globe 2015: Product User Manual; Zenodo: Geneve, Switzerland, 01 January 2019. [Google Scholar] [CrossRef]
- Nature Map Earth. Nature Map Earth. Available online: https://naturemap.earth/ (accessed on 11 February 2020).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest | Shrubs | Herbaceous Vegetation | Croplands | Built-up | Bare/sparse Vegetation | Snow/Ice | Permanent Water | Herbaceous Wetland | Lichen/Moss | Total | Sample Count | User’s accuracy | Confidence Interval ± | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Forest | 33.1 | 1.9 | 1.2 | 0.6 | 0.0 | 0.0 | 0.0 | 0.0 | 0.1 | 0.1 | 37.1 | 38.3 | 89.4 | 0.8 |
| Shrubs | 1.5 | 5.8 | 1.4 | 0.3 | 0.0 | 0.2 | 0.0 | 0.0 | 0.1 | 0.0 | 9.3 | 7.9 | 62.4 | 3.1 |
| Herbaceous vegetation | 1.2 | 2.3 | 13.8 | 0.6 | 0.0 | 0.5 | 0.0 | 0.1 | 0.3 | 1.0 | 20.0 | 19.2 | 69.2 | 1.8 |
| Croplands | 1.1 | 0.4 | 1.6 | 8.2 | 0.1 | 0.0 | 0.0 | 0.1 | 0.1 | 0.0 | 11.6 | 12.6 | 70.2 | 2.1 |
| Built-up | 0.1 | 0.0 | 0.0 | 0.0 | 0.5 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.6 | 3.9 | 77.3 | 5.7 |
| Bare/sparse vegetation | 0.0 | 0.3 | 0.8 | 0.0 | 0.0 | 13.5 | 0.0 | 0.0 | 0.0 | 0.0 | 14.7 | 6.5 | 91.5 | 1.8 |
| Snow/ice | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.1 | 1.9 | 0.0 | 0.0 | 0.0 | 2.0 | 2.4 | 94.7 | 3.5 |
| Permanent Water | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.1 | 0.0 | 2.0 | 0.0 | 0.0 | 2.1 | 4.0 | 94.9 | 2.0 |
| Herbaceous Wetland | 0.1 | 0.1 | 0.3 | 0.0 | 0.0 | 0.0 | 0.0 | 0.1 | 0.5 | 0.1 | 1.1 | 3.7 | 46.5 | 6.3 |
| Lichen/moss | 0.0 | 0.0 | 0.1 | 0.0 | 0.0 | 0.4 | 0.0 | 0.0 | 0.0 | 0.9 | 1.4 | 1.7 | 63.9 | 7.0 |
| Total | 37.3 | 10.9 | 19.2 | 9.7 | 0.7 | 14.7 | 2.0 | 2.3 | 1.2 | 2.2 | 100 | |||
| Sample count | 38.9 | 9.2 | 19.4 | 10.6 | 3.6 | 7.3 | 2.3 | 4.3 | 2.6 | 1.8 | 100 | |||
| Producer’s accuracy | 88.9 | 53.4 | 71.8 | 83.9 | 76.1 | 91.7 | 98.9 | 86.8 | 43.7 | 42 | 80.2 | |||
| Confidence interval ± | 0.8 | 2.8 | 1.8 | 2.0 | 7.6 | 1.4 | 0.9 | 3.2 | 6.4 | 5.3 | 0.7 |
| Number of Samples | Overall Accuracy (%) | Confidence Intervals ± | |
|---|---|---|---|
| Africa | 3616 | 80.1 | 2.0 |
| Asia | 3071 | 83.3 | 1.5 |
| Northern Eurasia | 2976 | 79.8 | 1.6 |
| Europe | 3120 | 80.4 | 1.6 |
| North America | 2843 | 77.1 | 1.7 |
| Oceania & Australia | 2951 | 81.9 | 1.9 |
| South America | 3017 | 79.6 | 1.5 |
| Trees | Shrub | Herbaceous Vegetation | Crops | Lichen/Moss | Bare/Sparse Vegetation | Snow/Ice | Built-up | Water | |
|---|---|---|---|---|---|---|---|---|---|
| Mean absolute error % (MAE) | 9.0 | 9.4 | 17.3 | 5.1 | 2.9 | 5.6 | 0.1 | 0.8 | 0.8 |
| Root mean square error % (RMSE) | 17.9 | 17.4 | 28.1 | 15.8 | 15.1 | 15.6 | 3.3 | 5.7 | 5.9 |
| Number of Samples | Globcover 2009 | LC-CCI 2010 | MODIS 2010 | Globeland30 2010 | CGLS-LC100 2015 Collection 2 | |
|---|---|---|---|---|---|---|
| Global scale | 24593 | 60.0 | 66.7 | 69.4 | 67.3 | 72.3 |
| Eurasia | 10353 | 65.4 | 71.1 | 70.0 | 72.3 | 73.6 |
| North America | 4686 | 56.5 | 67.6 | 70.1 | 65.2 | 73.5 |
| Australia & Oceania | 2381 | 49.7 | 59.0 | 69.6 | 61.8 | 69.8 |
| Africa | 3881 | 50.8 | 55.4 | 62.9 | 57.2 | 68.0 |
| South America | 3292 | 66.2 | 70.0 | 73.9 | 70.6 | 73.1 |
| Attribute | Value |
|---|---|
| Dataset | Collection 2 |
| Provided epochs | 2015 |
| Dataset version | 2.0.2 |
| Concept DOI | 10.5281/zenodo.3243508 |
| Version DOI | 10.5281/zenodo.3243509 |
| Citation | Marcel Buchhorn, Bruno Smets, Luc Bertels, Myroslava Lesiv, Nandin-Erdene Tsendbazar, Martin Herold, & Steffen Fritz. (2019). Copernicus Global Land Service: Land Cover 100m: Collection 2: epoch 2015 (Version V2.0.2) [Data set]. Zenodo. DOI: 10.5281/zenodo.3243509 |
| Direct Access | http://doi.org/10.5281/zenodo.3243509 |
| Data layers per epoch | 20 |
| File Size | 63.3 GBytes |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buchhorn, M.; Lesiv, M.; Tsendbazar, N.-E.; Herold, M.; Bertels, L.; Smets, B. Copernicus Global Land Cover Layers—Collection 2. Remote Sens. 2020, 12, 1044. https://doi.org/10.3390/rs12061044
Buchhorn M, Lesiv M, Tsendbazar N-E, Herold M, Bertels L, Smets B. Copernicus Global Land Cover Layers—Collection 2. Remote Sensing. 2020; 12(6):1044. https://doi.org/10.3390/rs12061044
Chicago/Turabian StyleBuchhorn, Marcel, Myroslava Lesiv, Nandin-Erdene Tsendbazar, Martin Herold, Luc Bertels, and Bruno Smets. 2020. "Copernicus Global Land Cover Layers—Collection 2" Remote Sensing 12, no. 6: 1044. https://doi.org/10.3390/rs12061044
APA StyleBuchhorn, M., Lesiv, M., Tsendbazar, N. -E., Herold, M., Bertels, L., & Smets, B. (2020). Copernicus Global Land Cover Layers—Collection 2. Remote Sensing, 12(6), 1044. https://doi.org/10.3390/rs12061044