Harmonization of Space-Borne Infra-Red Sensors Measuring Sea Surface Temperature

 , , ,
, , ,
Abstract
:
1. Introduction
2. Context, Data and Methods
2.1. Gap in Dual-View Reference Sensors for SST
2.2. Data
2.3. SST Retrieval by Optimal Estimation
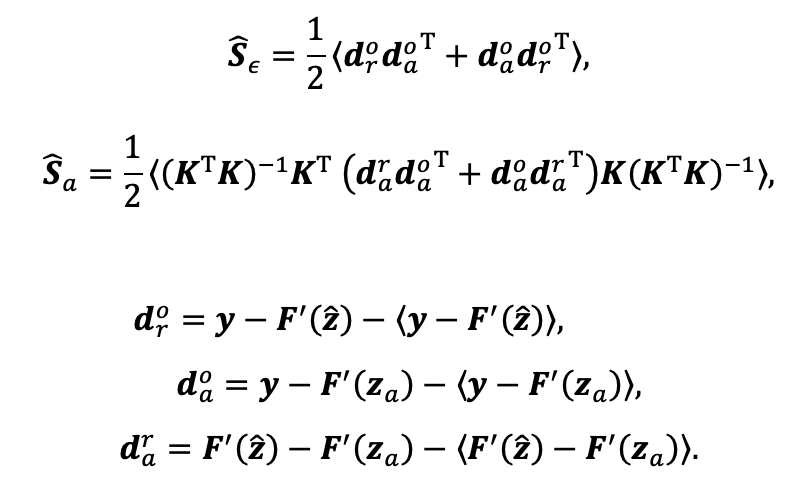
2.4. Parameter Estimation Method
- the brightness temperature bias in each of the 3.7, 11 and 12 μm channels, ;
- the bias in the prior total column water vapor (TCWV) from NWP, ;
- the error covariance matrix of the difference between observed and simulated brightness temperatures, ; and
- the error covariance matrix of the prior information, .
3. Results
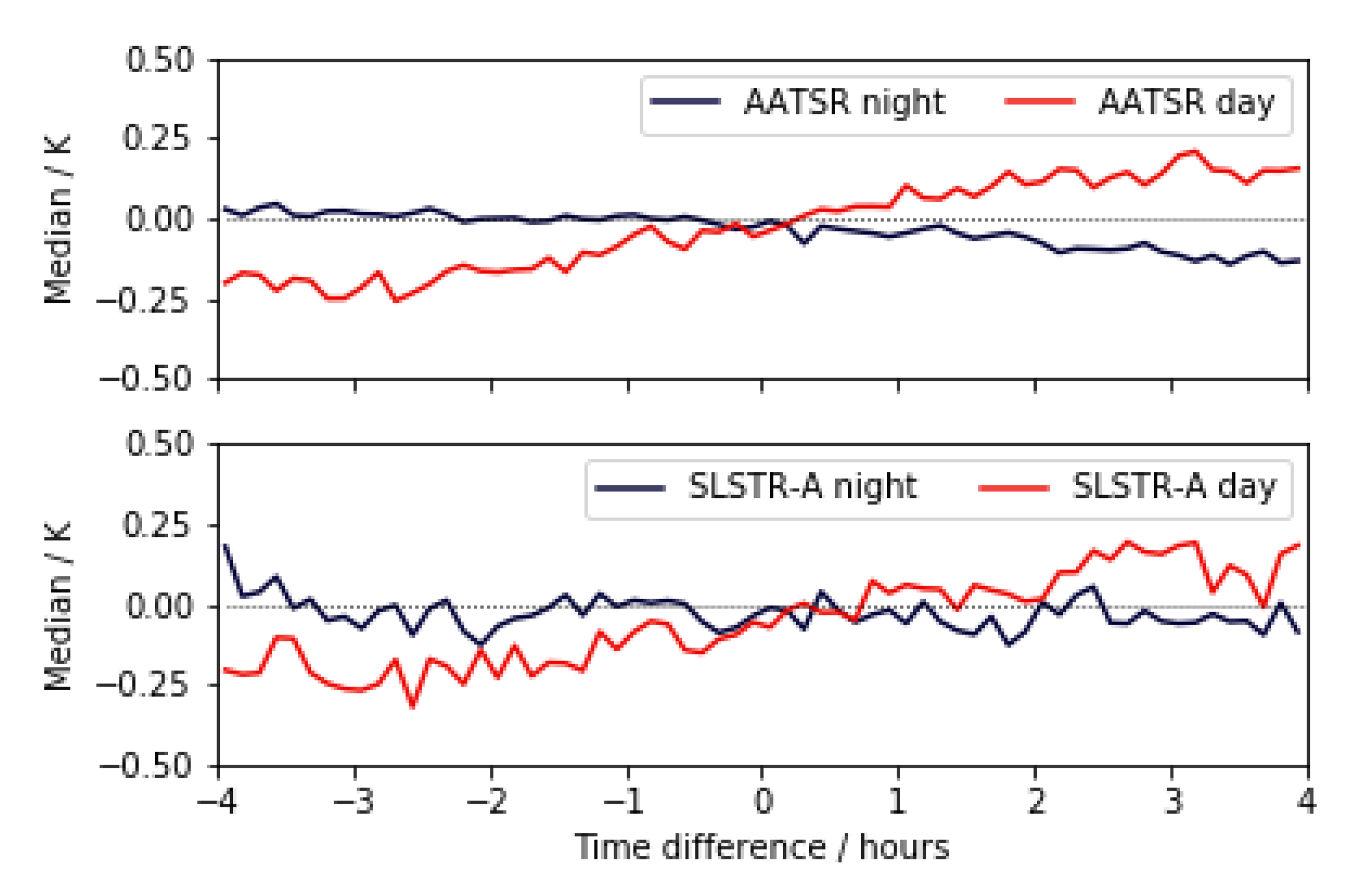
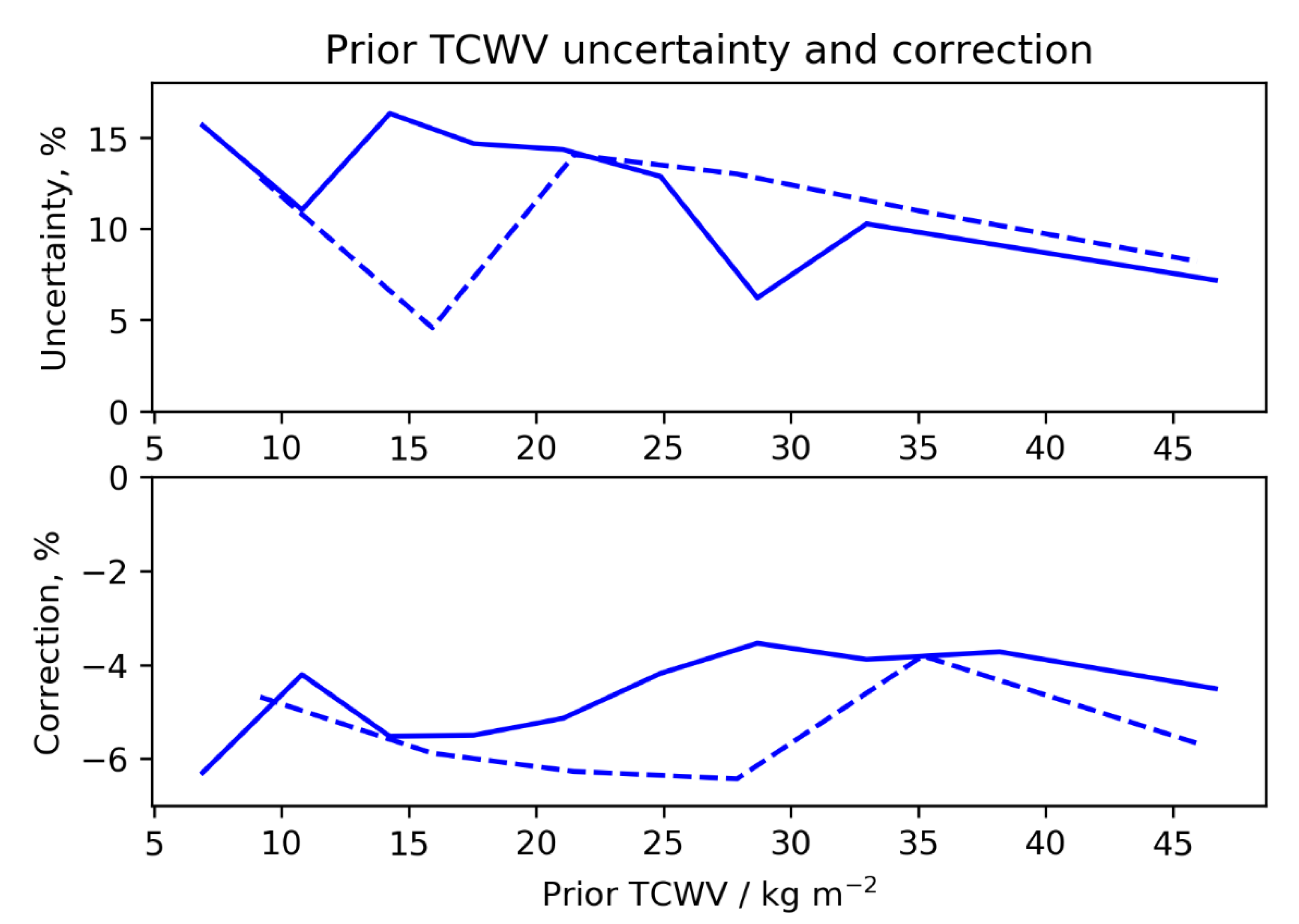
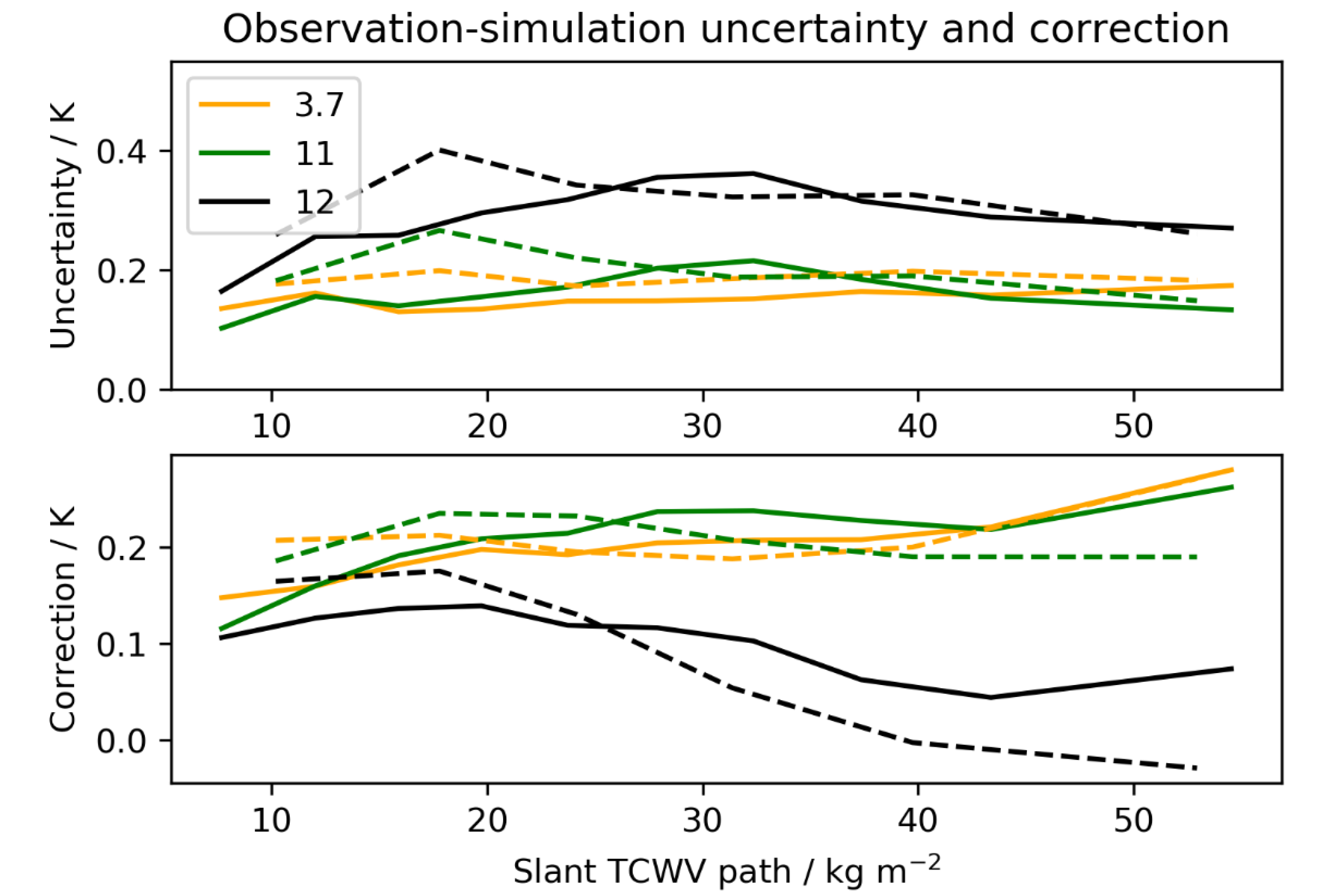
3.1. Harmonization to AATSR
3.2. Harmonization to SLSTR
3.3. Independent Assessment against Drifting Buoys over Gap Period
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Smith, W.L.; Rao, P.K.; Koffler, R.; Curtis, W.R. Determination of sea-surface temperature from satellite high resolution infrared window radiation measurements. Mon. Weather Rev. 1970, 98, 604–611. [Google Scholar] [CrossRef]
- Anding, D.; Kauth, R. Estimation of sea surface temperature from space. Remote Sens. Environ. 1970, 1, 217–220. [Google Scholar] [CrossRef] [Green Version]
- Donlon, C.J.; Casey, K.C.; Gentemann, C.; LeBorgne, P.; Robinson, I.S.; Reynolds, R.W.; Merchant, C.J.; Llewellyn-Jones, D.; Minnett, P.J.; Piolle, J.F.; et al. Successes and Challenges for the Modern Sea Surface Temperature Observing System; OceanObs’09; Hall, J., Harrison, D.E., Stammer, D., Eds.; European Space Agency: Venice, Italy, 2009. [Google Scholar]
- Skirving, W.; Enríquez, S.; Hedley, J.D.; Dove, S.; Eakin, C.M.; Mason, R.; De La Cour, J.; Liu, G.; Hoegh-Guldberg, O.; Strong, A.E.; et al. Remote Sensing of Coral Bleaching Using Temperature and Light: Progress towards an Operational Algorithm. Remote Sens. 2017, 10, 18. [Google Scholar] [CrossRef] [Green Version]
- Merchant, C.J.; Le Borgne, P.; Marsouin, A.; Roquet, H. Optimal estimation of sea surface temperature from split-window observations. Remote Sens. Environ. 2008, 112, 2469–2484. [Google Scholar] [CrossRef]
- Petrenko, B.; Ignatov, A.; Kihai, Y.; Stroup, J.; Dash, P. Evaluation and selection of SST regression algorithms for JPSS VIIRS. J. Geophys. Res. Atmos. 2014, 119, 4580–4599. [Google Scholar] [CrossRef]
- Koner, P.; Harris, A.; Maturi, E. A Physical Deterministic Inverse Method for Operational Satellite Remote Sensing: An Application for Sea SurfaceTemperature Retrievals. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5872–5888. [Google Scholar] [CrossRef]
- Embury, O.; Merchant, C.J.; Corlett, G.K. A reprocessing for climate of sea surface temperature from the along-track scanning radiometers: Initial validation, accounting for skin and diurnal variability effects. Remote Sens. Environ. 2012, 116, 62–78. [Google Scholar] [CrossRef] [Green Version]
- Fiedler, E.; McLaren, A.; Banzon, V.; Brasnett, B.; Ishizaki, S.; Kennedy, J.; Rayner, N.; Roberts-Jones, J.; Corlett, G.; Merchant, C.J.; et al. Intercomparison of long-term sea surface temperature analyses using the GHRSST Multi-Product Ensemble (GMPE) system. Remote Sens. Environ. 2019, 222, 18–33. [Google Scholar] [CrossRef] [Green Version]
- Reynolds, R.W.; Chelton, D.B.; Roberts-Jones, J.; Martin, M.J.; Menemenlis, D.; Merchant, C.J. Objective Determination of Feature Resolution in Two Sea Surface Temperature Analyses. J. Clim. 2013, 26, 2514–2533. [Google Scholar] [CrossRef] [Green Version]
- Chin, T.M.; Vazquez, J.; Armstrong, E.M. A multi-scale high-resolution analysis of global sea surface temperature. Remote Sens. Environ. 2017, 200, 154–169. [Google Scholar] [CrossRef]
- Giering, R.; Quast, R.; Mittaz, J.P.D.; Hunt, S.; Harris, P.; Woolliams, E.R.; Merchant, C.J. A Novel Framework to Harmonise Satellite Data Series for Climate Applications. Remote Sens. 2019, 11, 1002. [Google Scholar] [CrossRef] [Green Version]
- Hollmann, R.; Merchant, C.J.; Saunders, R.; Downy, C.; Buchwitz, M.; Cazenave, A.; Chuvieco, E.; Defourny, P.; De Leeuw, G.; Forsberg, R.; et al. The ESA Climate Change Initiative: Satellite Data Records for Essential Climate Variables. Bull. Am. Meteorol. Soc. 2013, 94, 1541–1552. [Google Scholar] [CrossRef] [Green Version]
- Merchant, C.J.; Embury, O.; Bulgin, C.E.; Block, T.; Corlett, G.K.; Fiedler, E.; Good, S.A.; Mittaz, J.; Rayner, N.A.; Berry, D.; et al. Satellite-based time-series of sea-surface temperature since 1981 for climate applications. Sci. Data 2019, 6, 223. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Merchant, C.J.; Embury, O.; Roberts-Jones, J.; Fiedler, E.; Bulgin, C.E.; Corlett, G.K.; Good, S.; McLaren, A.; Rayner, N.; Morak-Bozzo, S.; et al. Sea surface temperature datasets for climate applications from Phase 1 of the European Space Agency Climate Change Initiative (SST CCI). Geosci. Data J. 2014, 1, 179–191. [Google Scholar] [CrossRef] [Green Version]
- Llewellyn-Jones, D.; Remedios, J. The Advanced along Track Scanning Radiometer (AATSR) and its predecessors ATSR-1 and ATSR-2: An introduction to the special issue. Remote Sens. Environ. 2012, 116, 1–3. [Google Scholar] [CrossRef]
- Nieke, J.; Dransfeld, S.; Donlon, C.; Berruti, B.; Mecklenburg, S.; Team, E.E.S. Ieee, SENTINEL-3 A and B optical payload: Early Results From Commissioning and Tandem Flight Activities. In Proceedings of the Igarss 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 1098–1099. [Google Scholar]
- Merchant, C.J.; Harris, A.R.; Murray, M.J.; Zavody, A.M. Toward the elimination of bias in satellite retrievals of sea surface temperature: 1. Theory, modeling and interalgorithm comparison. J. Geophys. Res. Space Phys. 1999, 104, 23565–23578. [Google Scholar] [CrossRef]
- Zavody, A.M.; Mutlow, C.T.; Llewellyn-Jones, D.T. A radiative transfer model for sea surface temperature retrieval for the along-track scanning radiometer. J. Geophys. Res. Space Phys. 1995, 100, 937. [Google Scholar] [CrossRef]
- Merchant, C.J.; Embury, O.; Rayner, N.A.; Berry, D.; Corlett, G.K.; Lean, K.; Veal, K.L.; Kent, E.; Llewellyn-Jones, D.T.; Remedios, J.J.; et al. A 20 year independent record of sea surface temperature for climate from Along-Track Scanning Radiometers. J. Geophys. Res. Space Phys. 2012, 117, 117. [Google Scholar] [CrossRef] [Green Version]
- Smith, D.L.; Nightingale, T.J.; Mortimer, H.; Middleton, K.; Edeson, R.; Cox, C.V.; Mutlow, C.T.; Maddison, B.J.; Coppo, P. Calibration approach and plan for the sea and land surface temperature radiometer. J. Appl. Remote Sens. 2014, 8, 84980. [Google Scholar] [CrossRef]
- Coppo, P.; Mastrandrea, C.; Stagi, M.; Calamai, L.; Nieke, J. Sea and Land Surface Temperature Radiometer detection assembly design and performance. J. Appl. Remote Sens. 2014, 8, 84979. [Google Scholar] [CrossRef]
- Liang, X.; Ignatov, A. AVHRR, MODIS, and VIIRS radiometric stability and consistency in SST bands. J. Geophys. Res. Oceans 2013, 118, 3161–3171. [Google Scholar] [CrossRef]
- McClain, E.P.; Pichel, W.G.; Walton, C.C. Comparative performance of AVHRR-based multichannel sea surface temperatures. J. Geophys. Res. Space Phys. 1985, 90, 1587–1601. [Google Scholar] [CrossRef]
- Walton, C.C.; Pichel, W.G.; Sapper, J.F.; May, D.A. The development and operational application of nonlinear algorithms for the measurement of sea surface temperatures with the NOAA polar-orbiting environmental satellites. J. Geophys. Res. Space Phys. 1998, 103, 27999–28012. [Google Scholar] [CrossRef]
- Walton, C.C. A review of differential absorption algorithms utilized at NOAA for measuring sea surface temperature with satellite radiometers. Remote Sens. Environ. 2016, 187, 434–446. [Google Scholar] [CrossRef]
- Merchant, C.J.; Harris, A.R.; Roquet, H.; Le Borgne, P. Retrieval characteristics of non-linear sea surface temperature from the Advanced Very High Resolution Radiometer. Geophys. Res. Lett. 2009, 36, 36. [Google Scholar] [CrossRef] [Green Version]
- Rodgers, C.D. Inverse Methods for Atmospheric Sounding: Theory and Practice; World Scientific Publishing: Singapore, 2000; p. 240. [Google Scholar]
- Block, T.; Embacher, S.; Merchant, C.J.; Donlon, C. High-performance software framework for the calculation of satellite-to-satellite data matchups (MMS version 1.2). Geosci. Model Dev. 2018, 11, 2419–2427. [Google Scholar] [CrossRef] [Green Version]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Schulzweida, U. CDO User Guide (Version 1.9.8); Max Planck Institute for Meteorology: Hamburg, Germany, 2019. [Google Scholar]
- Sobol’, I.M.; Asotsky, D.; Kreinin, A.; Kucherenko, S. Construction and Comparison of High-Dimensional Sobol’ Generators. Wilmott J. 2011, 2011, 64–79. [Google Scholar] [CrossRef]
- Gentemann, C.; Minnett, P.J.; Le Borgne, P.; Merchant, C.J. Multi-satellite measurements of large diurnal warming events. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef] [Green Version]
- While, J.; Mao, C.; Martin, M.J.; Roberts-Jones, J.; Sykes, P.A.; Good, S.A.; McLaren, A.J. An operational analysis system for the global diurnal cycle of sea surface temperature: Implementation and validation. Q. J. R. Meteorol. Soc. 2017, 143, 1787–1803. [Google Scholar] [CrossRef]
- Morak-Bozzo, S.; Merchant, C.J.; Kent, E.; Berry, D.; Carella, G. Climatological diurnal variability in sea surface temperature characterized from drifting buoy data. Geosci. Data J. 2016, 3, 20–28. [Google Scholar] [CrossRef] [Green Version]
- Poli, P.; Lucas, M.; O’carroll, A.; Le Menn, M.; David, A.; Corlett, G.K.; Blouch, P.; Meldrum, D.; Merchant, C.J.; Belbeoch, M.; et al. The Copernicus Surface Velocity Platform drifter with Barometer and Reference Sensor for Temperature (SVP-BRST): Genesis, design, and initial results. Ocean Sci. 2019, 15, 199–214. [Google Scholar] [CrossRef] [Green Version]
- O’Carroll, A.; Eyre, J.R.; Saunders, R.W. Three-Way Error Analysis between AATSR, AMSR-E, and In Situ Sea Surface Temperature Observations. J. Atmos. Ocean. Technol. 2008, 25, 1197–1207. [Google Scholar] [CrossRef] [Green Version]
- Barton, I.J.; Minnett, P.; Maillet, K.A.; Donlon, C.J.; Hook, S.J.; Jessup, A.T.; Nightingale, T.J. The Miami2001 Infrared Radiometer Calibration and Intercomparison. Part II: Shipboard Results. J. Atmos. Ocean. Technol. 2004, 21, 268–283. [Google Scholar] [CrossRef] [Green Version]
- Donlon, C.J.; Minnett, P.J.; Jessup, A.; Barton, I.; Emery, W.; Hook, S.; Wimmer, W.; Nightingale, T.J.; Zappa, C. Chapter 3.2—Ship-Borne Thermal Infrared Radiometer Systems. In Experimental Methods in the Physical Sciences; Zibordi, G., Donlon, C.J., Parr, A.C., Eds.; Academic Press: Cambridge, MA, USA, 2014; Volume 47, pp. 305–404. [Google Scholar]
- Embury, O.; Merchant, C.; Good, S. Product Quality Assessment Report: Sea Surface Temperature; Copernicus Climate Change Service: Reading, UK, 2019. [Google Scholar]
- Merchant, C.J.; Harris, A.R.; Maturi, E.; Maccallum, S. Probabilistic physically based cloud screening of satellite infrared imagery for operational sea surface temperature retrieval. Q. J. R. Meteorol. Soc. 2005, 131, 2735–2755. [Google Scholar] [CrossRef] [Green Version]
- Watts, P.D.; Allen, M.R.; Nightingale, T.J. Wind Speed Effects on Sea Surface Emission and Reflection for the along Track Scanning Radiometer. J. Atmospheric Ocean. Technol. 1996, 13, 126–141. [Google Scholar] [CrossRef] [Green Version]
- Nalli, N.; Smith, W.L.; Huang, B. Quasi-specular model for calculating the reflection of atmospheric-emitted infrared radiation from a rough water surface. Appl. Opt. 2001, 40, 1343–1353. [Google Scholar] [CrossRef]
- Merchant, C.J.; Le Borgne, P.; Roquet, H.; Marsouin, A. Sea surface temperature from a geostationary satellite by optimal estimation. Remote Sens. Environ. 2009, 113, 445–457. [Google Scholar] [CrossRef]
- Saunders, R.; Hocking, J.; Turner, E.; Rayer, P.; Rundle, D.; Brunel, P.; Vidot, J.; Roquet, P.; Matricardi, M.; Geer, A.; et al. An update on the RTTOV fast radiative transfer model (currently at version 12). Geosci. Model Dev. 2018, 11, 2717–2737. [Google Scholar] [CrossRef] [Green Version]
- Clough, S.; Shephard, M.; Mlawer, E.; Delamere, J.; Iacono, M.; Cady-Pereira, K.; Boukabara, S.A.; Brown, P. Atmospheric radiative transfer modeling: A summary of the AER codes. J. Quant. Spectrosc. Radiat. Transf. 2005, 91, 233–244. [Google Scholar] [CrossRef]
- Embury, O.; Merchant, C.J.; Filipiak, M.J. A reprocessing for climate of sea surface temperature from the along-track scanning radiometers: Basis in radiative transfer. Remote Sens. Environ. 2012, 116, 32–46. [Google Scholar] [CrossRef]
- Embury, O.; Merchant, C.J. A reprocessing for climate of sea surface temperature from the along-track scanning radiometers: A new retrieval scheme. Remote Sens. Environ. 2012, 116, 47–61. [Google Scholar] [CrossRef]
- Merchant, C.J.; Picart, S.S.; Waller, J.A. Bias correction and covariance parameters for optimal estimation by exploiting matched in-situ references. Remote Sens. Environ. 2020, 237, 111590. [Google Scholar] [CrossRef]
- Desroziers, G.; Berre, L.; Chapnik, B.; Poli, P. Diagnosis of observation, background and analysis-error statistics in observation space. Q. J. R. Meteorol. Soc. 2005, 131, 3385–3396. [Google Scholar] [CrossRef]
- Waller, J.A.; Ballard, S.; Dance, S.L.; Kelly, G.; Nichols, N.K.; Simonin, D. Diagnosing Horizontal and Inter-Channel Observation Error Correlations for SEVIRI Observations Using Observation-Minus-Background and Observation-Minus-Analysis Statistics. Remote Sens. 2016, 8, 581. [Google Scholar] [CrossRef] [Green Version]
- Global Climate Observing System (GCOS). The Global Observing System for Climate: Implementation Needs; Global Climate Observing System (GCOS): Geneva, Switzerland, 2016. [Google Scholar]
- Mittaz, J.; Harris, A.R.; Sullivan, J.T. A Physical Method for the Calibration of the AVHRR/3 Thermal IR Channels 1: The Prelaunch Calibration Data. J. Atmos. Ocean. Technol. 2009, 26, 996–1019. [Google Scholar] [CrossRef]
- Mittaz, J.; Harris, A. A Physical Method for the Calibration of the AVHRR/3 Thermal IR Channels. Part II: An In-Orbit Comparison of the AVHRR Longwave Thermal IR Channels on board MetOp-A with IASI. J. Atmos. Ocean. Technol. 2011, 28, 1072–1087. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Harmonized Against | Mean/K | SD/K | Median/K | 1 Robust SD/K | SST Sensitivity, % | Trend/K yr−1 |
|---|---|---|---|---|---|---|
| AATSR | 0.02 | 0.41 | 0.07 | 0.31 | 86 | |
| SLSTR | 0.01 | 0.39 | 0.06 | 0.30 | 82 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merchant, C.J.; Block, T.; Corlett, G.K.; Embury, O.; Mittaz, J.P.D.; Mollard, J.D.P. Harmonization of Space-Borne Infra-Red Sensors Measuring Sea Surface Temperature. Remote Sens. 2020, 12, 1048. https://doi.org/10.3390/rs12061048
Merchant CJ, Block T, Corlett GK, Embury O, Mittaz JPD, Mollard JDP. Harmonization of Space-Borne Infra-Red Sensors Measuring Sea Surface Temperature. Remote Sensing. 2020; 12(6):1048. https://doi.org/10.3390/rs12061048
Chicago/Turabian StyleMerchant, Christopher J., Thomas Block, Gary K. Corlett, Owen Embury, Jonathan P. D. Mittaz, and James D. P. Mollard. 2020. "Harmonization of Space-Borne Infra-Red Sensors Measuring Sea Surface Temperature" Remote Sensing 12, no. 6: 1048. https://doi.org/10.3390/rs12061048
APA StyleMerchant, C. J., Block, T., Corlett, G. K., Embury, O., Mittaz, J. P. D., & Mollard, J. D. P. (2020). Harmonization of Space-Borne Infra-Red Sensors Measuring Sea Surface Temperature. Remote Sensing, 12(6), 1048. https://doi.org/10.3390/rs12061048