Recovery of Rapid Water Mass Changes (RWMC) by Kalman Filtering of GRACE Observations


 ,
, 


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data Used in this Study
2.1.1. GLDAS Model
2.1.2. WGHM Model
2.1.3. Real GRACE KBRR Data to be Inverted by KF
2.2. Methodology
2.2.1. Principle of Energy Conservation
2.2.2. Forward Modeling
2.2.3. Inverse Problem: Kalman Filtering Estimation
2.2.4. Subdivision of the Earth’s Surface into Triangular Tiles
3. Validation of the Method by Numerical Simulation and Results
3.1. Recovery from Simulated Geopotential Data
3.2. Inversion of Real GRACE Data at Coarse Temporal Resolution
3.3. Comparison with GRACE SH and Mascons Solutions
3.4. Comparison with Model Outputs at High Temporal Resolution
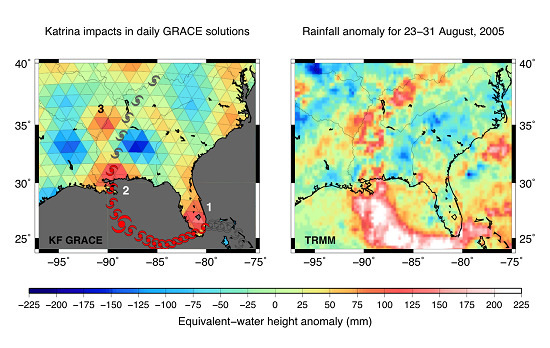
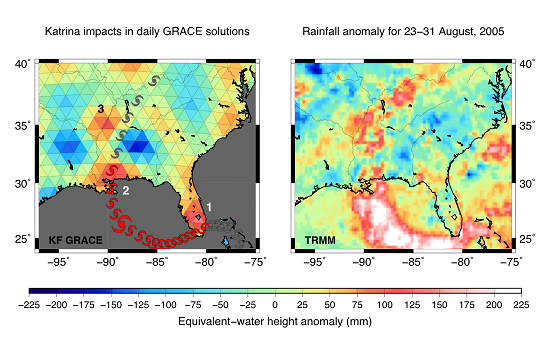
3.5. Detection of Sub-Monthly Impacts of Meteorological Events
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tapley, B.D.; Bettadpur, S.; Watkins, M.; Reigber, C. The gravity recovery and climate experiment: Mission overview and early results. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef] [Green Version]
- Physical Geodesy, 2nd ed.; Hofmann-Wellenhof, B.; Moritz, H. (Eds.) Springer: Vienna, Austria, 2006; pp. 1–2. ISBN 978-3-211-33545-1. [Google Scholar]
- Bettadpur, S. CSR Level-2 Processing Standards Document for Level-2 Product Release 04, GRACE 327-742 (CSR-GR-03-03); The GRACE Project, Center for Space Research, The University of Texas: Austin, TX, USA, 2007. [Google Scholar]
- Chambers, D.P.; Bonin, J.A. Evaluation of Release-05 GRACE time-variable gravity coefficients over the ocean. Ocean Sci. 2012, 8, 859–868. [Google Scholar] [CrossRef] [Green Version]
- Dahle, C.; Flechtner, F.; Gruber, C.; König, D.; König, R.; Michalak, G.; Neumayer, K.-H. GFZ GRACE Level-2 Processing Standards Document for Level-2 Product Release 0005; Revised edition; GFZ Series Scientific Technical Report; GFZ Publications: Potsdam, Germany, January 2013; ISBN 1610-0956. [Google Scholar] [CrossRef]
- Flechtner, F. GFZ Level-2 Processing Standards Document for Product Release 0004. Rev.1.0, GRACE project documentation 327–743; GFZ: Potsdam, Germany, 2007. [Google Scholar]
- Vishwakarma, D.B.; Devaraju, B.; Sneeuw, N. What Is the Spatial Resolution of grace Satellite Products for Hydrology? Remote Sens. 2018, 10, 852. [Google Scholar] [CrossRef] [Green Version]
- Forootan, E.; Didova, O.; Schumacher, M.; Kusche, J.; Elsaka, B. Comparisons of atmospheric mass variations derived from ECMWF reanalysis and operational fields, over 2003–2011. J. Geod. 2014, 88, 503–514. [Google Scholar] [CrossRef] [Green Version]
- Han, S.-C.; Jekeli, C.; Shum, C.K. Time-variable aliasing effects of ocean tides, atmosphere, and continental water mass on monthly mean GRACE gravity field: Temporal aliasing on GRACE gravity field. J. Geophys. Res. 2004, 109. [Google Scholar] [CrossRef]
- Ray, R.D.; Luthcke, S.B. Tide model errors and GRACE gravimetry: Towards a more realistic assessment. Geophys. J. Int. 2006, 167, 1055–1059. [Google Scholar] [CrossRef] [Green Version]
- Thompson, P.F.; Bettadpur, S.V.; Tapley, B.D. Impact of short period, non-tidal, temporal mass variability on GRACE gravity estimates: Impact of short period, non-tidal, temporal mass variability on GRACE estimatesIMPACT OF SHORT. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Swenson, S.; Wahr, J. Post-processing removal of correlated errors in GRACE data. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Freeden, W.; Schreiner, M. Spherical Functions of Mathematical Geosciences: A Scalar, Vectorial, and Tensorial Setup; Advances in Geophysical and Environmental Mechanics and Mathematics; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-3-540-85111-0. [Google Scholar]
- Luthcke, S.B.; Zwally, H.J.; Abdalati, W.; Rowlands, D.D.; Ray, R.D.; Nerem, R.S.; Lemoine, F.G.; McCarthy, J.J.; Chinn, D.S. Recent Greenland Ice Mass Loss by Drainage System from Satellite Gravity Observations. Science 2006, 314, 1286–1289. [Google Scholar] [CrossRef] [Green Version]
- Luthcke, S.B.; Sabaka, T.J.; Loomis, B.D.; Arendt, A.A.; McCarthy, J.J.; Camp, J. Antarctica, Greenland and Gulf of Alaska land-ice evolution from an iterated GRACE global mascon solution. J. Glaciol. 2013, 59, 613–631. [Google Scholar] [CrossRef]
- Rowlands, D.D.; Luthcke, S.B.; Klosko, S.M.; Lemoine, F.G.R.; Chinn, D.S.; McCarthy, J.J.; Cox, C.M.; Anderson, O.B. Resolving mass flux at high spatial and temporal resolution using GRACE intersatellite measurements. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Rowlands, D.D.; Luthcke, S.B.; McCarthy, J.J.; Klosko, S.M.; Chinn, D.S.; Lemoine, F.G.; Boy, J.-P.; Sabaka, T.J. Global mass flux solutions from GRACE: A comparison of parameter estimation strategies—Mass concentrations versus Stokes coefficients. J. Geophys. Res. Solid Earth 2010, 115. [Google Scholar] [CrossRef]
- Watkins, M.M.; Wiese, D.N.; Yuan, D.-N.; Boening, C.; Landerer, F.W. Improved methods for observing Earth’s time variable mass distribution with GRACE using spherical cap mascons. J. Geophys. Res. Solid Earth 2015, 120, 2648–2671. [Google Scholar] [CrossRef]
- Wiese, D.N.; Landerer, F.W.; Watkins, M.M. Quantifying and reducing leakage errors in the JPL RL05M GRACE mascon solution. Water Resour. Res. 2016, 52, 7490–7502. [Google Scholar] [CrossRef]
- Wiese, D.N.; Yuan, D.-N.; Boening, C.; Landerer, F.W.; Watkins, M.M. JPL GRACE Mascon Ocean, Ice, and Hydrology Equivalent Water Height Release 06 Coastal Resolution Improvement (CRI) Filtered Version 1.0; PO.DAAC: Pasadena, CA, USA, 2018. [Google Scholar] [CrossRef]
- Save, H.; Bettadpur, S.; Tapley, B.D. High-resolution CSR GRACE RL05 mascons. J. Geophys. Res. Solid Earth 2016, 121, 7547–7569. [Google Scholar] [CrossRef]
- Jacob, T.; Wahr, J.; Pfeffer, W.T.; Swenson, S. Recent contributions of glaciers and ice caps to sea level rise. Nature 2012, 482, 514–518. [Google Scholar] [CrossRef]
- Schrama, E.J.O.; Wouters, B.; Rietbroek, R. A mascon approach to assess ice sheet and glacier mass balances and their uncertainties from GRACE data. J. Geophys. Res. Solid Earth 2014, 119, 6048–6066. [Google Scholar] [CrossRef]
- Velicogna, I.; Sutterley, T.C.; van den Broeke, M.R. Regional acceleration in ice mass loss from Greenland and Antarctica using GRACE time-variable gravity data. Geophys. Res. Lett. 2014, 41, 8130–8137. [Google Scholar] [CrossRef] [Green Version]
- Ramillien, G.L.; Frappart, F.; Gratton, S.; Vasseur, X. Sequential estimation of surface water mass changes from daily satellite gravimetry data. J. Geod. 2015, 89, 259–282. [Google Scholar] [CrossRef]
- Ramillien, G.; Biancale, R.; Gratton, S.; Vasseur, X.; Bourgogne, S. GRACE-derived surface water mass anomalies by energy integral approach: Application to continental hydrology. J. Geod. 2011, 85, 313–328. [Google Scholar] [CrossRef]
- Ramillien, G.L.; Seoane, L.; Frappart, F.; Biancale, R.; Gratton, S.; Vasseur, X.; Bourgogne, S. Constrained Regional Recovery of Continental Water Mass Time-variations from GRACE-based Geopotential Anomalies over South America. Surv. Geophys. 2012, 33, 887–905. [Google Scholar] [CrossRef] [Green Version]
- Kurtenbach, E.; Mayer-Gürr, T.; Eicker, A. Deriving daily snapshots of the Earth’s gravity field from GRACE L1B data using Kalman filtering. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- Kurtenbach, E.; Eicker, A.; Mayer-Gürr, T.; Holschneider, M.; Hayn, M.; Fuhrmann, M.; Kusche, J. Improved daily GRACE gravity field solutions using a Kalman smoother. J. Geodyn. 2012, 59–60, 39–48. [Google Scholar] [CrossRef]
- Sabaka, T.J.; Rowlands, D.D.; Luthcke, S.B.; Boy, J.-P. Improving global mass flux solutions from Gravity Recovery and Climate Experiment (GRACE) through forward modeling and continuous time correlation. J. Geophys. Res. Solid Earth 2010, 115. [Google Scholar] [CrossRef]
- Kvas, A.; Mayer-Gürr, T. GRACE gravity field recovery with background model uncertainty. J. Geod. 2019, 93, 2543–2552. [Google Scholar] [CrossRef] [Green Version]
- Gruber, C.; Gouweleeuw, B. Short-latency monitoring of continental, ocean-atmospheric mass variations using GRACE intersatellite accelerations. Geophys. J. Int. 2019, 217, 714–728. [Google Scholar] [CrossRef] [Green Version]
- Bonin, J.A.; Save, H. Evaluation of submonthly oceanographic signal in GRACE “daily” swath series using altimetry. Ocean Sci. 2019. [Google Scholar] [CrossRef] [Green Version]
- Rodell, M.; Houser, P.R.; Jambor, U.; Gottschalck, J.; Mitchell, K.; Meng, C.-J.; Arsenault, K.; Cosgrove, B.; Radakovich, J.; Bosilovich, M.; et al. The Global Land Data Assimilation System. Bull. Am. Meteorol. Soc. 2004, 85, 381–394. [Google Scholar] [CrossRef] [Green Version]
- Döll, P.; Kaspar, F.; Lehner, B. A global hydrological model for deriving water availability indicators: Model tuning and validation. J. Hydrol. 2003, 270, 105–134. [Google Scholar] [CrossRef]
- Güntner, A.; Stuck, J.; Werth, S.; Döll, P.; Verzano, K.; Merz, B. A global analysis of temporal and spatial variations in continental water storage. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- Hunger, M.; Döll, P. Value of river discharge data for global-scale hydrological modeling. Hydrol. Earth Syst. Sci. 2008, 12, 841–861. [Google Scholar] [CrossRef] [Green Version]
- Werth, S.; Güntner, A. Calibration of a Global Hydrological Modelglobal hydrological modelwith GRACE Data. In System Earth Via Geodetic-Geophysical Space Techniques; Flechtner, F.M., Gruber, T., Güntner, A., Mandea, M., Rothacher, M., Schöne, T., Wickert, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 417–426. ISBN 978-3-642-10228-8. [Google Scholar]
- Bi, H.; Ma, J.; Zheng, W.; Zeng, J. Comparison of soil moisture in GLDAS model simulations and in situ observations over the Tibetan Plateau. J. Geophys. Res. Atmos. 2016, 121, 2658–2678. [Google Scholar] [CrossRef] [Green Version]
- Scanlon, B.R.; Zhang, Z.; Save, H.; Sun, A.Y.; Müller Schmied, H.; van Beek, L.P.H.; Wiese, D.N.; Wada, Y.; Long, D.; Reedy, R.C.; et al. Global models underestimate large decadal declining and rising water storage trends relative to GRACE satellite data. Proc. Natl. Acad. Sci. USA 2018, 115, E1080. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bruinsma, S.; Lemoine, J.-M.; Biancale, R.; Valès, N. CNES/GRGS 10-day gravity field models (release 2) and their evaluation. Adv. Space Res. 2010, 45, 587–601. [Google Scholar] [CrossRef]
- Lemoine, J.-M.; Bruinsma, S.; Loyer, S.; Biancale, R.; Marty, J.-C.; Perosanz, F.; Balmino, G. Temporal gravity field models inferred from GRACE data. Adv. Space Res. 2007, 39, 1620–1629. [Google Scholar] [CrossRef]
- Standish, E.M.; Newhall, X.X.; Williams, J.G.; Folkner, W.M. JPL Planetary and Lunar Ephermerids, DE403/LE403; JPL Inter Office Memorandum: Pasadena, CA, USA, 1995; pp. 1–22. [Google Scholar]
- McCarthy, D.D.; Petit, G. IERS Conventions (2003); IERS Technical Note No. 32; International Earth Rotation and Reference Systems Service (IERS): Frankfurt am Main, Germany, 2004. [Google Scholar]
- Wahr, J.M. Body tides on an elliptical, rotating, elastic and oceanless Earth. Geophys. J. Int. 1981, 64, 677–703. [Google Scholar] [CrossRef] [Green Version]
- Cartwright, D.E.; Tayler, R.J. New computations of the tide-generating potential. Geophys. J. Int. 1971, 23, 45–73. [Google Scholar] [CrossRef] [Green Version]
- Cartwright, D.E.; Edden, A.C. Corrected Tables of Tidal Harmonics. Geophys. J. R. Astron. Soc. 1973, 33, 253–264. [Google Scholar] [CrossRef] [Green Version]
- Casotto, S. Nominal Ocean Tide Models for TOPEX Precise Orbit Determination. Ph.D. Thesis, Texas University, Austin, TX, USA, 1989. [Google Scholar]
- Le Provost, C.; Genco, M.L.; Lyard, F.; Vincent, P.; Canceil, P. Spectroscopy of the world ocean tides from a finite element hydrodynamic model. J. Geophys. Res. Oceans 1994, 99, 24777–24797. [Google Scholar] [CrossRef]
- Desai, S.D. Observing the pole tide with satellite altimetry. J. Geophys. Res. Oceans 2002, 107, 7-1–7-13. [Google Scholar] [CrossRef]
- Carrère, L.; Lyard, F. Modeling the barotropic response of the global ocean to atmospheric wind and pressure forcing—Comparisons with observations. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef] [Green Version]
- Jekeli, C. The determination of gravitational potential differences from satellite-to-satellite tracking. Celest. Mech. Dyn. Astron. 1999, 75, 85–101. [Google Scholar] [CrossRef]
- Han, S.-C.; Shum, C.K.; Jekeli, C. Precise estimation of in situ geopotential differences from GRACE low-low satellite-to-satellite tracking and accelerometer data. J. Geophys. Res. Solid Earth 2006, 111. [Google Scholar] [CrossRef] [Green Version]
- Evensen, G. Data Assimilation; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-3-642-03710-8. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Kalman, R.E.; Bucy, R.S. New Results in Linear Filtering and Prediction Theory. J. Basic Eng. 1961, 83, 95–108. [Google Scholar] [CrossRef]
- Encarnação, J.; Klees, R.; Zapreeva, E.; Ditmar, P.; Kusche, J. Influence of Hydrology-Related Temporal Aliasing on the Quality of Monthly Models Derived from GRACE Satellite Gravimetric Data. In Proceedings of the Observing our Changing Earth; Sideris, M.G., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 323–328. [Google Scholar]
- Arvor, D.; Funatsu, B.; Michot, V.; Dubreuil, V. Monitoring Rainfall Patterns in the Southern Amazon with PERSIANN-CDR Data: Long-Term Characteristics and Trends. Remote Sens. 2017, 9, 889. [Google Scholar] [CrossRef] [Green Version]
- Espinoza, J.C.; Marengo, J.A.; Ronchail, J.; Carpio, J.M.; Flores, L.N.; Guyot, J.L. The extreme 2014 flood in south-western Amazon basin: The role of tropical-subtropical South Atlantic SST gradient. Environ. Res. Lett. 2014, 9, 124007. [Google Scholar] [CrossRef]
- Marengo, J.A.; Liebmann, B.; Grimm, A.M.; Misra, V.; Silva Dias, P.L.; Cavalcanti, I.F.A.; Carvalho, L.M.V.; Berbery, E.H.; Ambrizzi, T.; Vera, C.S.; et al. Recent developments on the South American monsoon system. Int. J. Climatol. 2012, 32, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Cai, W.; Cowan, T.; Thatcher, M. Rainfall reductions over Southern Hemisphere semi-arid regions: The role of subtropical dry zone expansion. Sci. Rep. 2012, 2, 702. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Date | Lowest Pressure 1 (hPa) | Max. Surge Flooding (m) | Max. Wind Speed (km/h) | Max. Rainfall (mm) |
|---|---|---|---|---|---|
| Katrina | 23–31/08/2005 | 902 | 8.2 Mississippi Coast | ~200 Southeast Louisiana 3 | 198 in 48 h Philpot 3 |
| Rita | 17–26/09/2005 | 895 | 1.5 Key West | 185 South Louisiana | 130 |
| Wilma | 15–25/10/2005 | 882 Record low in the Atlantic | 1.98 Key West 2 | 190 | 76 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramillien, G.; Seoane, L.; Schumacher, M.; Forootan, E.; Frappart, F.; Darrozes, J. Recovery of Rapid Water Mass Changes (RWMC) by Kalman Filtering of GRACE Observations. Remote Sens. 2020, 12, 1299. https://doi.org/10.3390/rs12081299
Ramillien G, Seoane L, Schumacher M, Forootan E, Frappart F, Darrozes J. Recovery of Rapid Water Mass Changes (RWMC) by Kalman Filtering of GRACE Observations. Remote Sensing. 2020; 12(8):1299. https://doi.org/10.3390/rs12081299
Chicago/Turabian StyleRamillien, Guillaume, Lucía Seoane, Maike Schumacher, Ehsan Forootan, Frédéric Frappart, and José Darrozes. 2020. "Recovery of Rapid Water Mass Changes (RWMC) by Kalman Filtering of GRACE Observations" Remote Sensing 12, no. 8: 1299. https://doi.org/10.3390/rs12081299
APA StyleRamillien, G., Seoane, L., Schumacher, M., Forootan, E., Frappart, F., & Darrozes, J. (2020). Recovery of Rapid Water Mass Changes (RWMC) by Kalman Filtering of GRACE Observations. Remote Sensing, 12(8), 1299. https://doi.org/10.3390/rs12081299