Geolocation, Calibration and Surface Resolution of CYGNSS GNSS-R Land Observations

Abstract
:
1. Introduction
2. Geolocating GNSS Reflections from Land
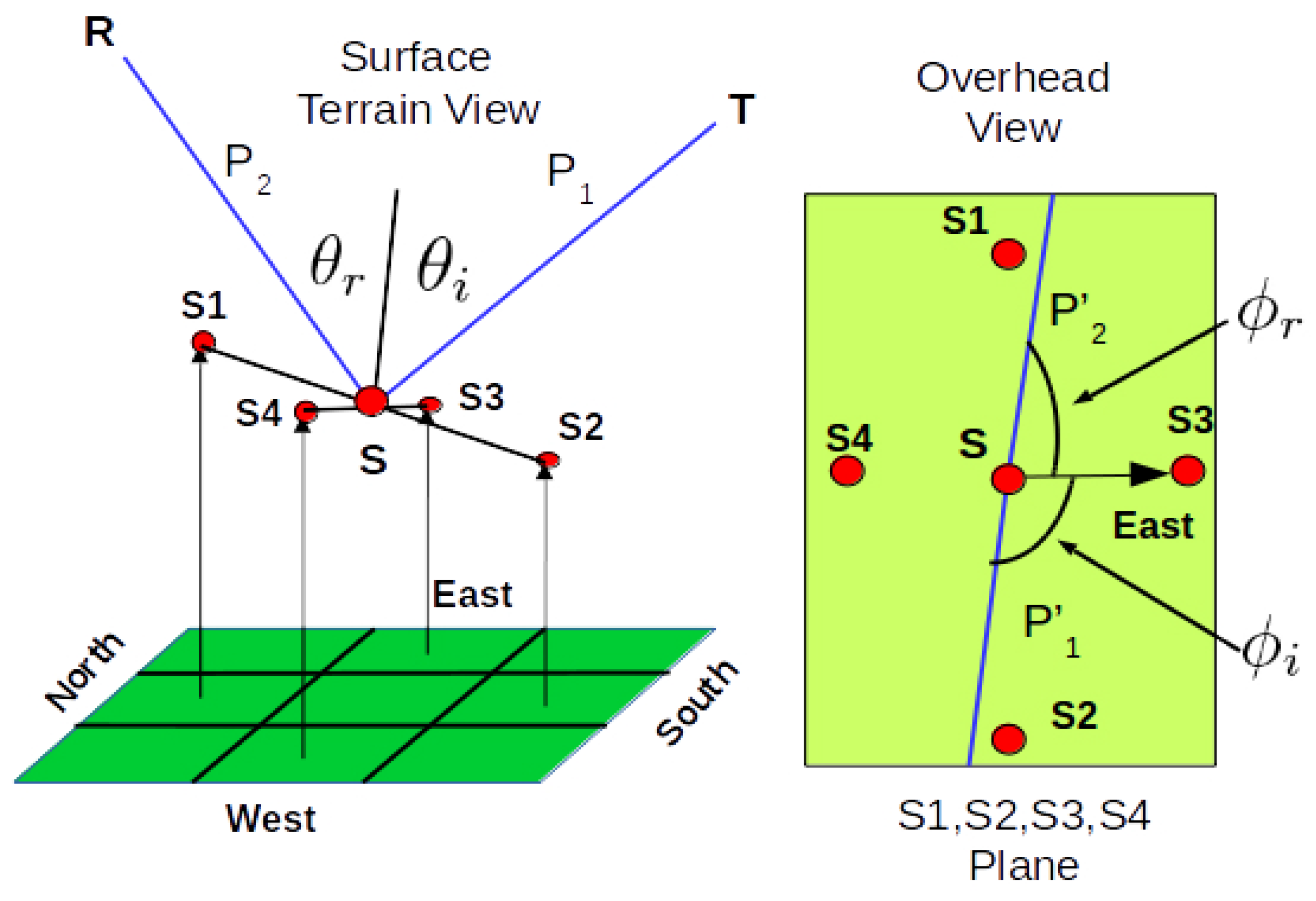
2.1. Surface Criteria for Forward Reflection
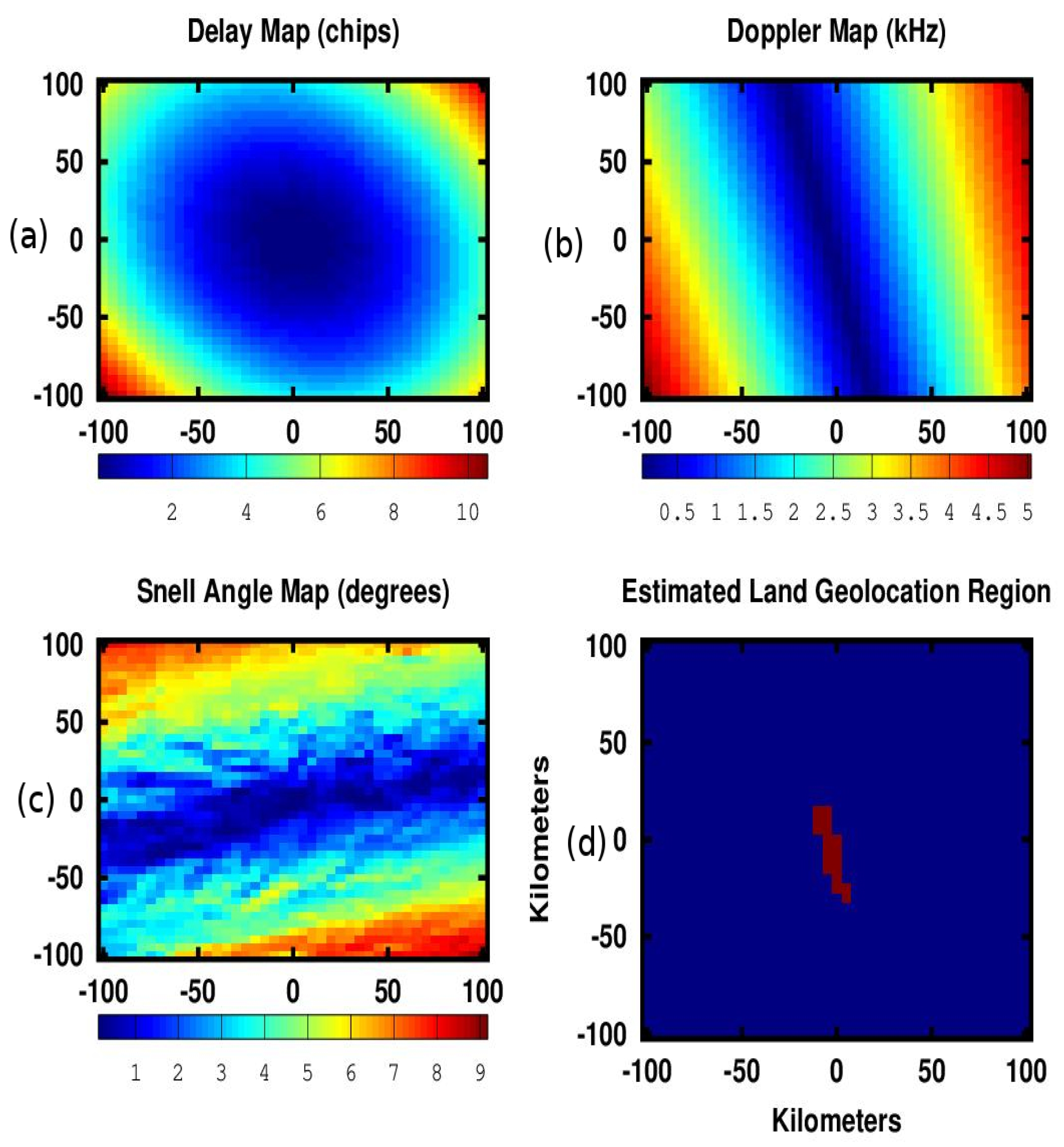
2.2. Local Surface Delay Calculation
Local Surface Doppler Estimate
2.3. Local Surface Snell Reflection Criteria
2.4. Summary of Geolocation Estimation Criteria
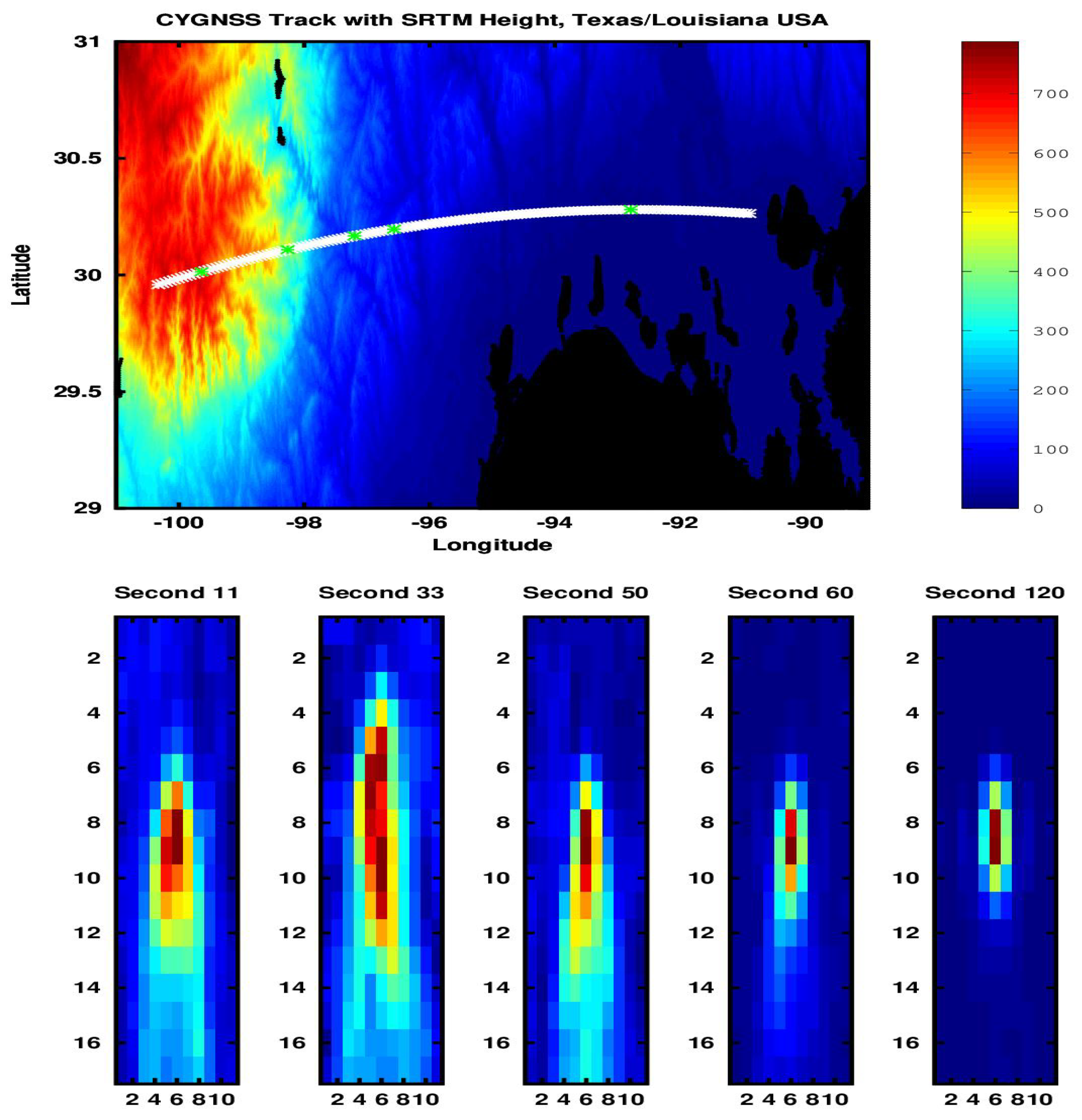
2.5. Land Geolocation Example
- Second 11: Relatively high terrain with a varied surface topography. The reflected power appears incoherent, with high confidence in the geolocation.
- Second 33: a “double peaked” DDM, which complicates geolocation determination. Delay and Doppler location checks are based on the highest of the DDM power peaks, which in this case is ambiguous. This “double peak” DDM (with one peak at delay bin 6, and another at delay bin 10) is due to the irregular topography of the surface reflection at second 33, where two distinct and spatially separated surface locations are meeting the geometric conditions suitable for directing power toward the receiver. Attempts at surface retrievals using this DDM would be problematic.
- Seconds 50 and 60: Surface reflections transition from rougher more varied topography to the flatter terrain of western Louisiana. The corresponding DDMs transition from noncoherent at second 50 to largely coherent at second 60.
- Second 120: An area containing multiple surface water bodies within and near the estimated geolocation region. The DDM itself shows a very strong coherent reflection within a limited region around the estimated specular point.
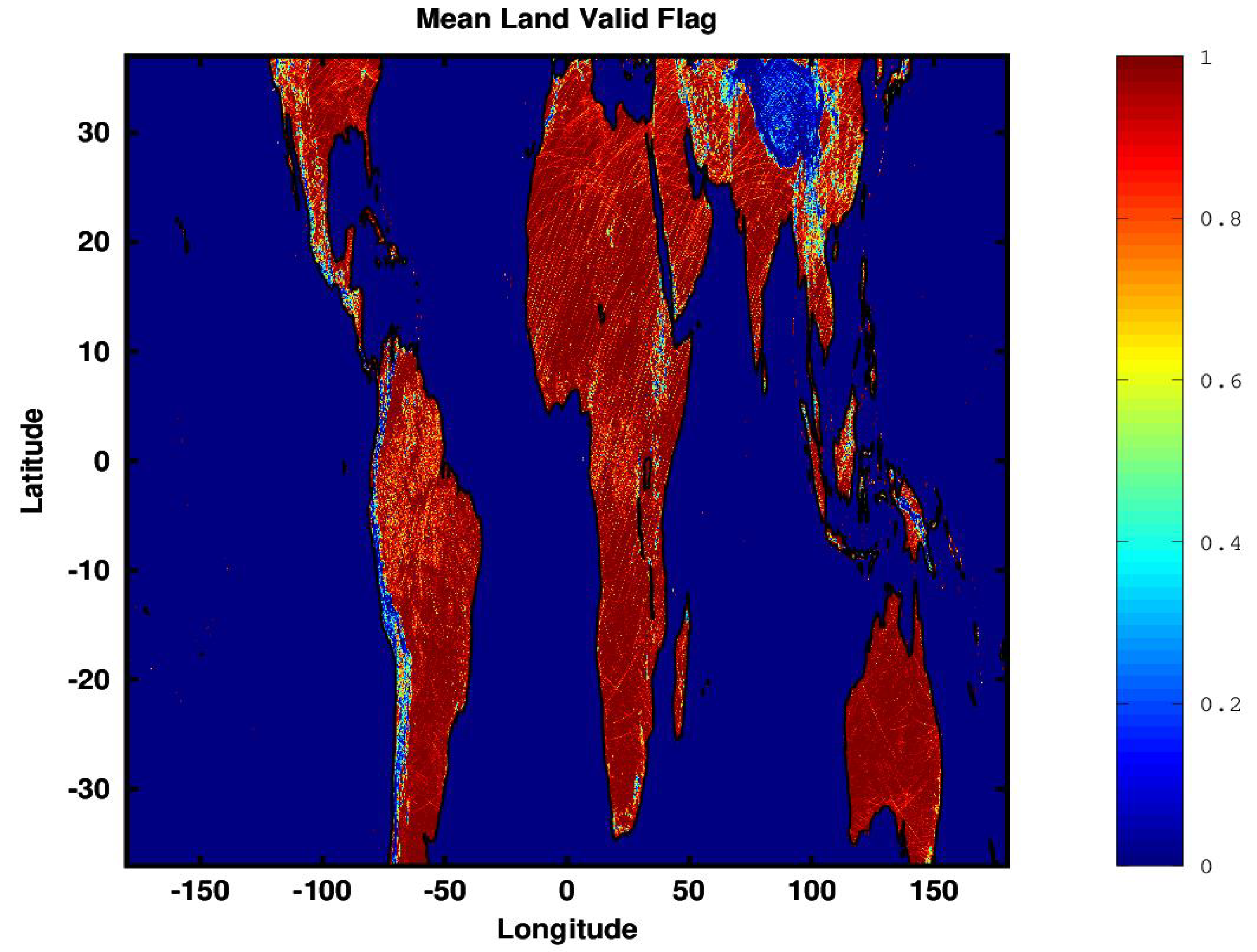
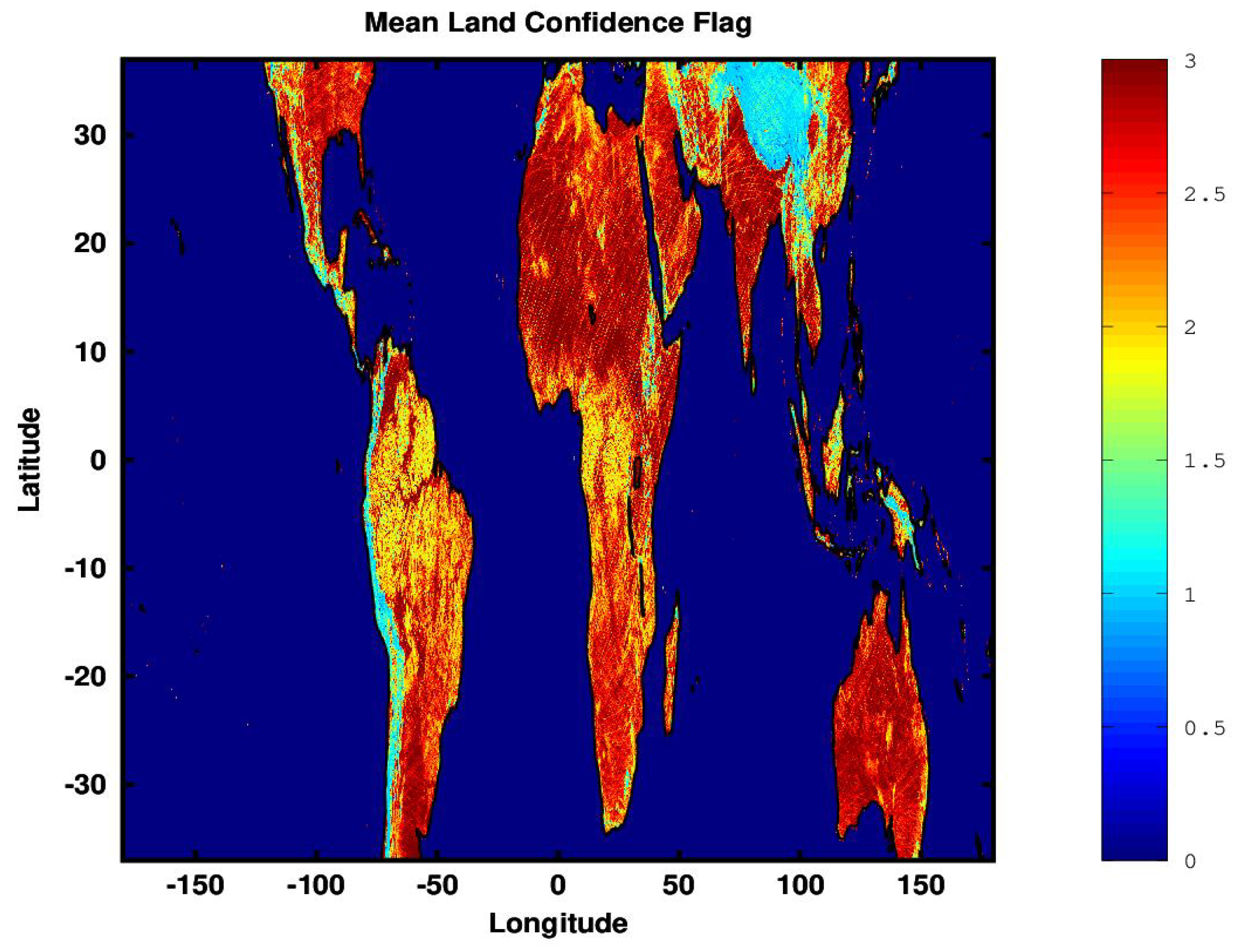
2.6. Global Assessment of Land Geolocation Confidence
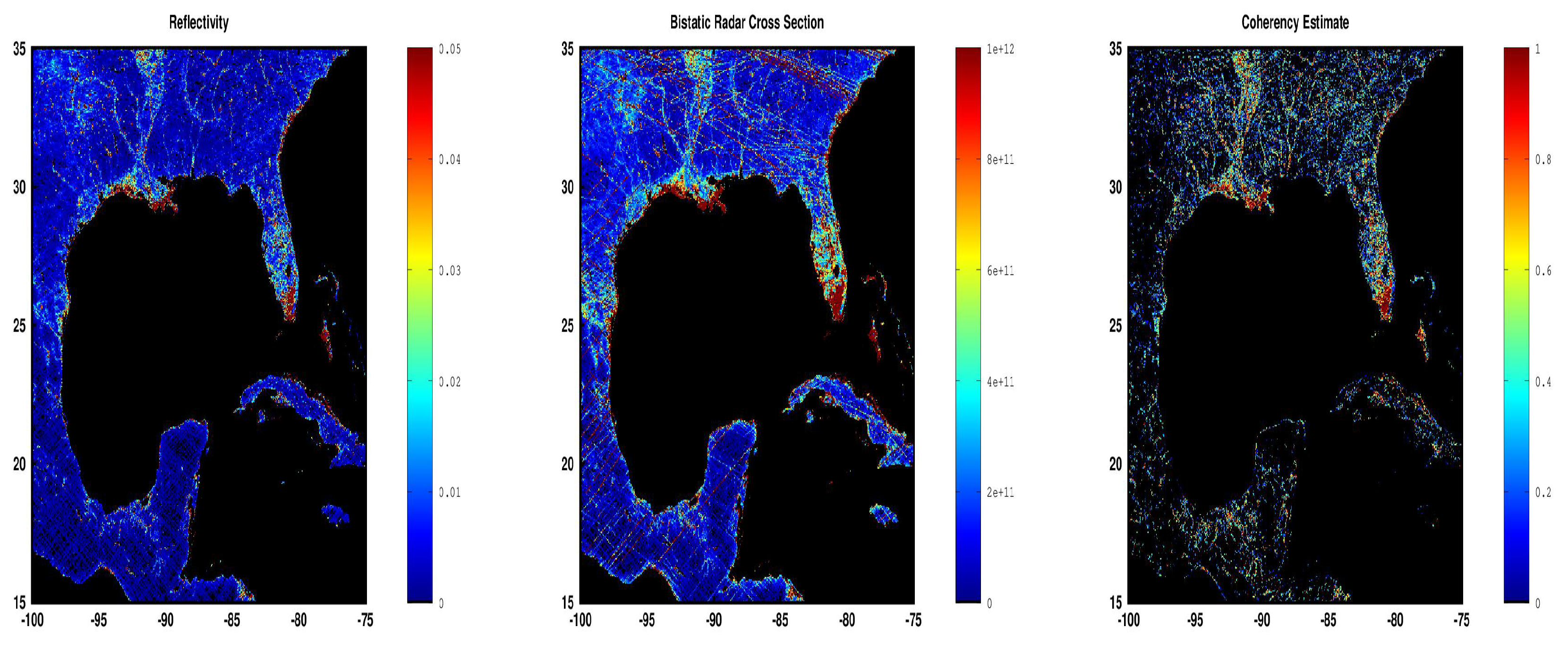
3. Calibration of GNSS-R Land Reflections
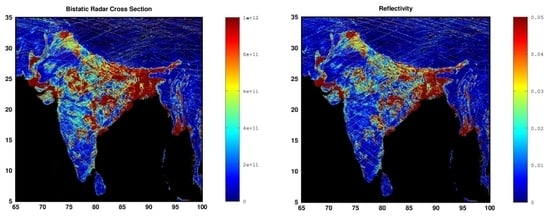
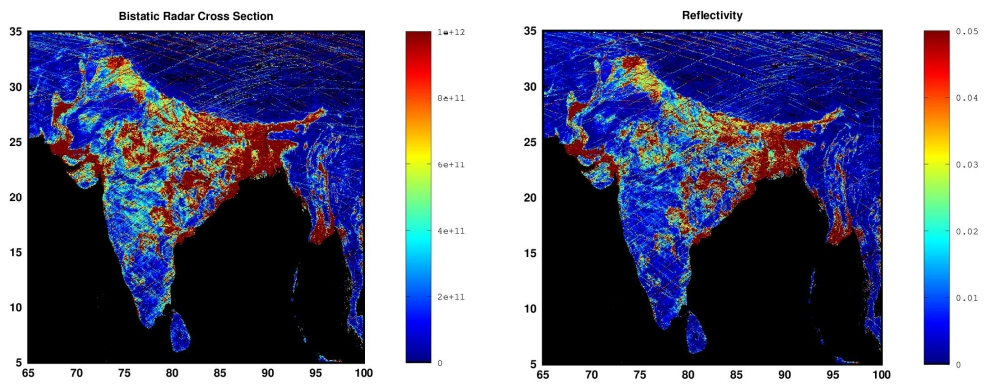
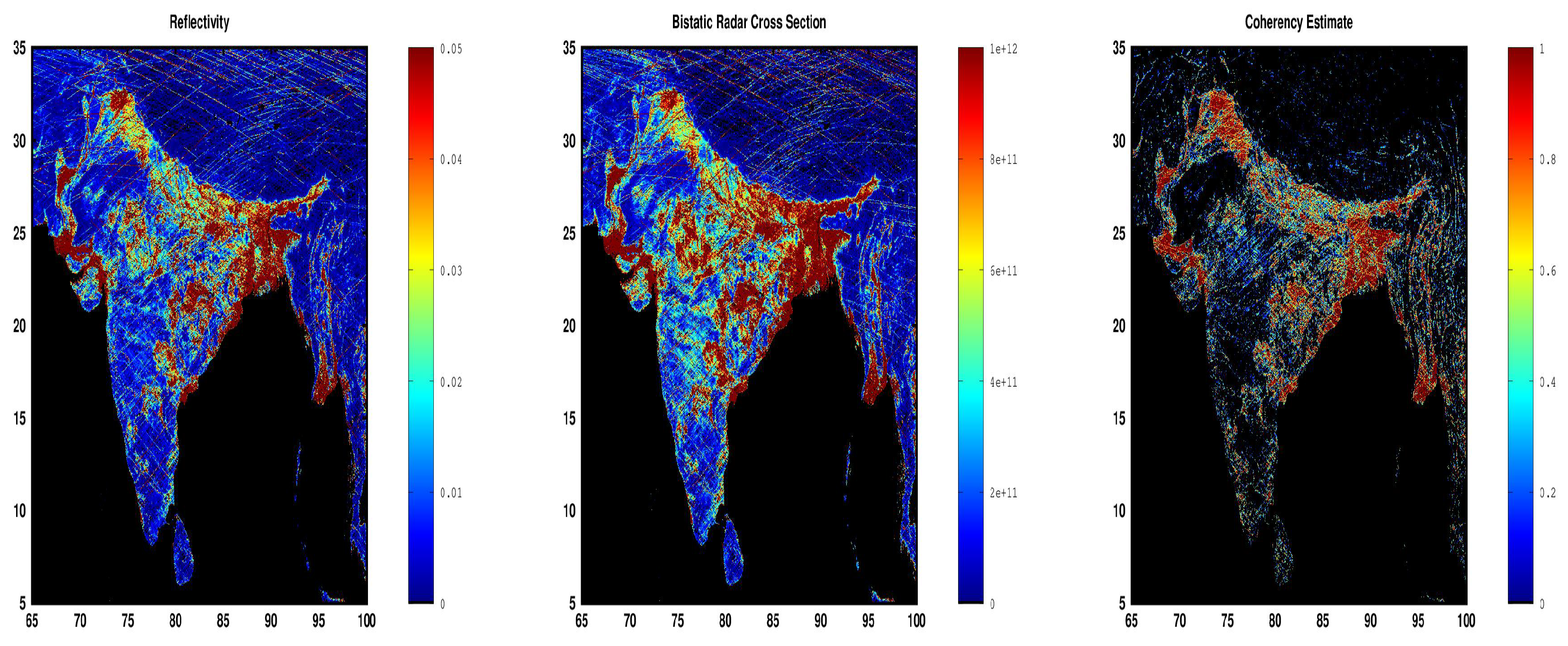
3.1. Level 1 Normalized Bistatic Radar Cross Section (NBRCS) Land Calibration
3.2. Level 1 Reflectivity Calculation
3.3. Distinguishing Coherent and Incoherent Returns
3.4. Level 1 Land Calibration Results
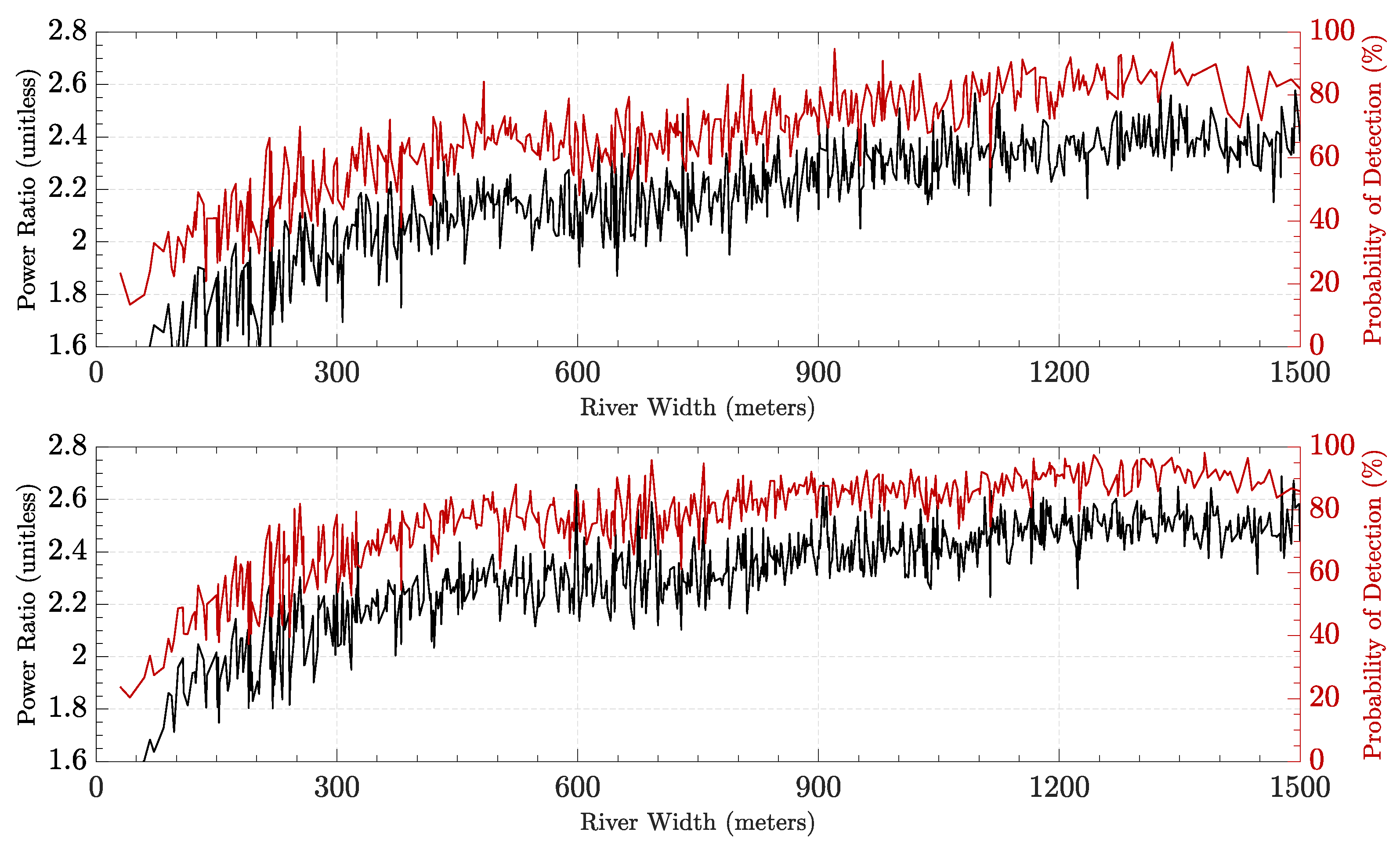
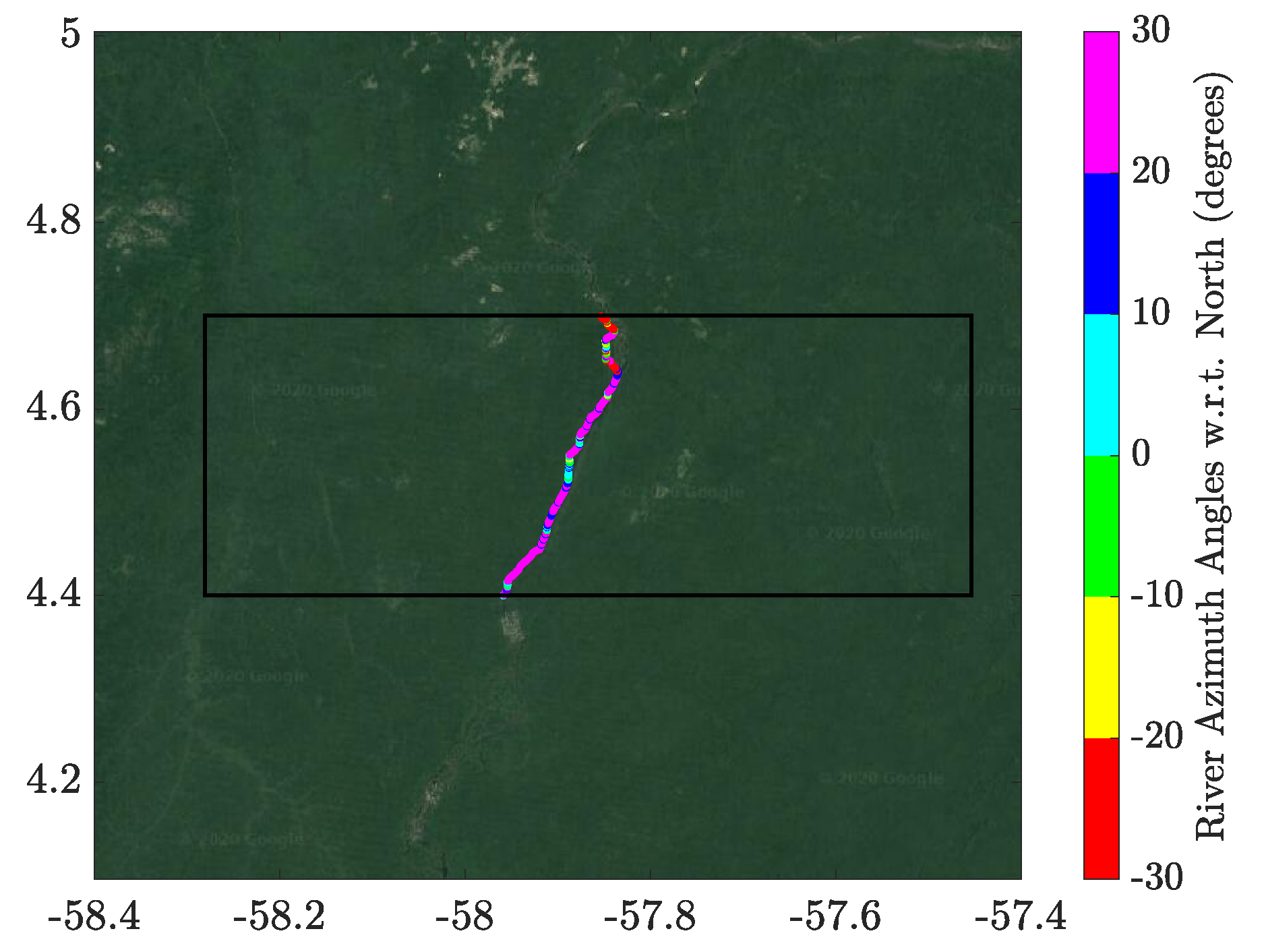
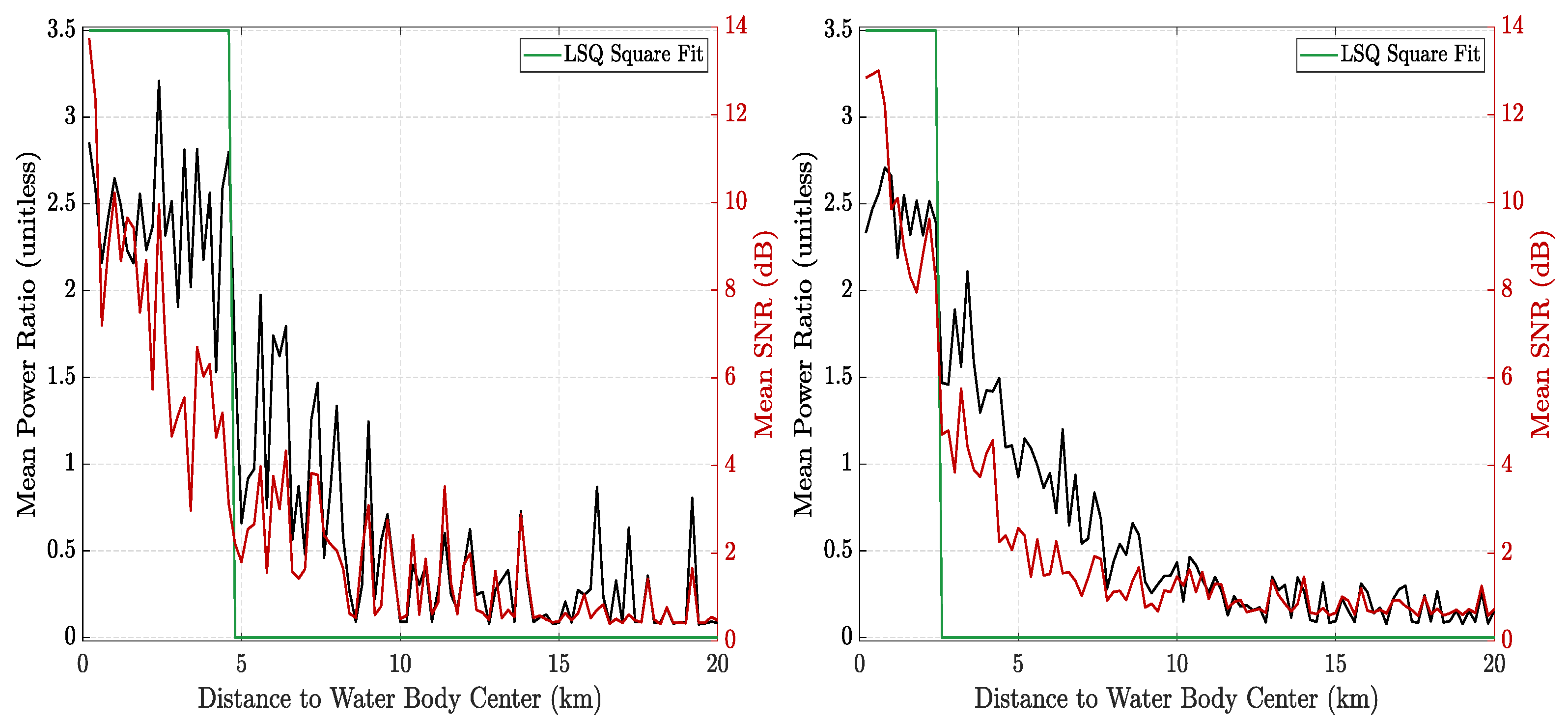
4. Analysis of Coherent Surface Resolution Using Ancillary River Width Data
- River widths are known to change dynamically, seasonally and during flooding events. The NARWidth data set provides an estimate of the river width at mean discharge, thus it does not account for natural seasonal variations. The analysis undertaken here focuses on using CYGNSS data over two eight month periods, the first starting with July 2018 and ending with February 2019 and the second starting with July 2019 and ending with February 2020. This included a total of 50 million measured CYGNSS specular points, within the NARWidth dataset’s coverage, providing ample data to generate statistically significant results. While variations in the size of the coherent reflection surface due to natural fluctuations in river widths will contribute errors into the analysis, the mean correspondence of measures of interest to varying river widths is expected to remain indicative of CYGNSS’s spatial resolution under conditions of coherent reflection.
- Previous analysis of CYGNSS data has shown that river surfaces are generally smooth enough to result in coherent forward reflections [6]. However, there will be cases when a river surface is rough relative to the reflecting L-band wavelength (19 cm) and will not generate coherent forward reflections. In these circumstances, the area of surface scattering will be significantly larger than an integrated Fresnel zone and not result in coherent detection of the river crossing.
- After (approximately) July 2019, the CYGNSS output data rate was increased from 1 Hz to 2 Hz Level 0 observations. The 2 Hz data output rate corresponds to a 0.5 s instrument integration interval, which reduces the length that the single look surface footprint is integrated across the surface at the specular point velocity. Generally, CYGNSS 1 Hz observations result in a surface integration on the order of 6 km in the along track direction due to satellite motion, while 2 Hz observations will span roughly half of that distance. Note that short intervals of coherent reflection (such as from a small water bodies) within the larger integration footprint often dominate the received power, resulting in detections of small water bodies within the longer integrated surface footprint.
- Horizontal errors in the surface geolocation of reflections near the Courantyne river will potentially introduce small errors (less than ≈ 1 km) in the river width estimates.
5. Discussion
6. Results
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CYGNSS | Cyclone Global Navigation Satellite System |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| GNSS-R | Global Navigation Satellite System Reflectometry |
| DDM | Delay Doppler Map |
| PR | Power Ratio |
| BRCS | Bistatic Radar Cross Section |
| NBRCS | Normalized Bistatic Radar Cross Section |
| NARWidth | North American River Width Data Set |
| DEM | Digital Elevation Model |
| ENU | East, North, Up |
| SNR | Signal to Noise Ratio |
| SRTM | Shuttle Radar Topography Mission |
| WGS84 | World Geodetic System 1984 |
References
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements, and Performance; Ganga Jamuna Press: Lincoln, MA, USA, 2001; ISBN 0-9709544-0-9. [Google Scholar]
- Gebre-Egziabher, D.; Gleason, S. GNSS Applications and Methods; Artech House: Norwood, MA, USA, 2009. [Google Scholar]
- Gleason, S. Remote Sensing of Ocean, Ice and Land Surfaces Using Bistatically Scattered GNSS Signals From Low Earth Orbit. Ph.D. Thesis, University of Surrey, Guildford, UK, 2006. [Google Scholar]
- Masters, D.; Katzberg, S.; Axelrad, P. Airborne GPS bistatic radar soil moisture measurements during SMEX02. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2003), Toulouse, France, 21–25 July 2003; Volume 2, pp. 896–898. [Google Scholar]
- Ruf, C.S.; Asharaf, S.; Balasubramaniam, R.; Gleason, S.; Lang, T.; McKague, D.; Twigg, D.; Waliser, D. In-Orbit Performance of the Constellation of CYGNSS Hurricane Satellites. Bull. Am. Meteorol. Soc. 2019, 100, 2009–2023. [Google Scholar] [CrossRef]
- Chew, C.; Reager, J.T.; Small, E. CYGNSS data map food inundation during the 2017 Atlantic hurricane season. Sci. Rep. 2018, 8, 9336. [Google Scholar] [CrossRef] [PubMed]
- Chew, C.C.; Small, E.E. Soil Moisture Sensing Using Spaceborne GNSS Reflections: Comparison of CYGNSS Reflectivity to SMAP Soil Moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef] [Green Version]
- Al-Khaldi, M.M.; Johnson, J.T.; O’Brien, A.J.; Balenzano, A.; Mattia, F. Time-Series Retrieval of Soil Moisture Using CYGNSS. IEEE Trans. Geosci. Remote. Sens. 2019, 57, 4322–4331. [Google Scholar] [CrossRef]
- Gleason, S.; Ruf, C.S.; Clarizia, M.P.; O’Brien, A.J. Calibration and Unwrapping of the Normalized Scattering Cross Section for the Cyclone Global Navigation Satellite System. IEEE Trans. Geosci. Remote. Sens. 2016, 54, 2495–2509. [Google Scholar] [CrossRef]
- Gleason, S. CYGNSS Algorithm Theoretical Basis Documents, Level 1A and 1B; University of Michigan: Ann Arbor, MI, USA, 2018. [Google Scholar]
- Zavorotny, V.; Voronovich, A. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote. Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef] [Green Version]
- Yardim, C.; Johnson, J.T.; Burkholder, R.; Teixeira, F.L.; Ouellette, J.D.; Chen, K.-S.; Brogioni, M.; Pierdicca, N. An intercomparison of models for predicting bistatic scattering from rough surfaces. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2759–2762. [Google Scholar] [CrossRef]
- Al-Khaldi, M.M.; Johnson, J.T.; Gleason, S.; Loria, E.; Yi, Y. An Algorithm for Detecting Coherence in Cyclone Global Navigation Satellite System Mission Level 1 Delay Doppler Maps. IEEE Trans. Geosci. Remote Sens. 2019. under review. [Google Scholar]
- Carreno-Luengo, H.; Luzi, G.; Crosetto, M. First Evaluation of Topography on GNSS-R: An Empirical Study Based on a Digital Elevation Model. Remote. Sens. 2019, 11, 2556. [Google Scholar] [CrossRef] [Green Version]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.; Liu, P.-W.; Judge, J. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef] [Green Version]
- Comite, D.; Ticconi, F.; Dente, L.; Guerriero, L.; Pierdicca, N. Bistatic Coherent Scattering From Rough Soils with Application to GNSS Reflectometry. IEEE Trans. Geosci. Remote. Sens. 2020, 58, 612–625. [Google Scholar] [CrossRef]
- Gleason, S. A Real-Time On-Orbit Signal Tracking Algorithm for GNSS Surface Observations. Remote. Sens. 2019, 11, 1858. [Google Scholar] [CrossRef] [Green Version]
- Gleason, S.; Ruf, C.S.; O’Brien, A.J.; McKague, D.S.; OrBrien, A.J. The CYGNSS Level 1 Calibration Algorithm and Error Analysis Based on On-Orbit Measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2019, 12, 37–49. [Google Scholar] [CrossRef]
- Shuttle Radar Topography Mission (SRTM). Available online: https://www.usgs.gov/centers/eros/ (accessed on 16 November 2018).
- Ulaby, F.T.; Long, D.G. Microwave Radar and Radiometric Remote Sensing; University Michigan Press: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Allen, G.H.; Pavelsky, T.M. Patterns of river width and surface area revealed by the satellite-derived North American River Width data set. Geophys. Res. Lett. 2015, 42, 395–402. [Google Scholar] [CrossRef]
- Loria, E.; O’Brien, A.; Gupta, I.J. Detection and Separation of Coherent Reflections in GNSS-R Measurements Using CYGNSS Data. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium 2018 (IGARSS 2018), Valencia, Spain, 22–27 July 2018; pp. 3995–3998. [Google Scholar] [CrossRef]
- Camps, A. Spatial Resolution in GNSS-R Under Coherent Scattering. IEEE Geosci. Remote. Sens. Lett. 2020, 17, 32–36. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Criteria | Threshold | Verification |
|---|---|---|
| 2.5 C/A Code Chips | Maximum delay | |
| 200 Hz | Maximum Doppler | |
| 2 Degrees | Reflection geometry |
| SNR Thold (2 dB) | Delay, Doppler, Snell | Confidence | Land Percentage | Comment |
|---|---|---|---|---|
| Above | Invalid | 0 | 1.3 (0 to 1) | Most likely incorrect |
| Below | Invalid | 1 | 21.5 (1 to 2) | Probably incorrect |
| Below | Valid | 2 | 28.4 (2 to 2.5) | Likely correct |
| Above | Valid | 3 | 48.8 (2.5 to 3) | High probability correct |
| Courantyne River Region (Guyana/Suriname) | ||
|---|---|---|
| Parameter | Mean Value | Comment |
| River Width | 500 m | NARWidth [21] |
| North Angle | 29 deg | Figure 8 |
| Test Region | Min | Max |
| Latitude | 4.4 | 4.7 |
| Longitude | −58.3 | −57.45 |
| Track Direction | North Angle | River Angle |
| Ascending | 53 deg | 24 deg |
| Descending | 127 deg | 97 deg |
| Parameter | Distance | Mean | STD |
|---|---|---|---|
| 1 Hz DDM Frequency (Obs. Spacing: 5990m) | |||
| Power Ratio | 500 m | 2.38 | 0.77 |
| Power Ratio | 4600 m | 2.41 | 1.54 |
| SNR | 500 m | 9.75 dB | 5.35 dB |
| SNR | 4600 m | 6.63 dB | 5.23 dB |
| Detection Prob. | 500 m | 91.67 % | N/A |
| Detection Prob. | 4600 m | 77.67 % | N/A |
| 2 Hz DDM Frequency (Obs. Spacing: 3010m) | |||
| Power Ratio | 500 m | 2.43 | 0.87 |
| Power Ratio | 2400 m | 2.46 | 1.13 |
| SNR | 500 m | 12.91 dB | 6.48 dB |
| SNR | 2400 m | 10.05 dB | 5.97 dB |
| Detection Prob. | 500 m | 92.16 % | N/A |
| Detection Prob. | 2400 m | 87.12 % | N/A |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gleason, S.; O’Brien, A.; Russel, A.; Al-Khaldi, M.M.; Johnson, J.T. Geolocation, Calibration and Surface Resolution of CYGNSS GNSS-R Land Observations. Remote Sens. 2020, 12, 1317. https://doi.org/10.3390/rs12081317
Gleason S, O’Brien A, Russel A, Al-Khaldi MM, Johnson JT. Geolocation, Calibration and Surface Resolution of CYGNSS GNSS-R Land Observations. Remote Sensing. 2020; 12(8):1317. https://doi.org/10.3390/rs12081317
Chicago/Turabian StyleGleason, Scott, Andrew O’Brien, Anthony Russel, Mohammad M. Al-Khaldi, and Joel T. Johnson. 2020. "Geolocation, Calibration and Surface Resolution of CYGNSS GNSS-R Land Observations" Remote Sensing 12, no. 8: 1317. https://doi.org/10.3390/rs12081317
APA StyleGleason, S., O’Brien, A., Russel, A., Al-Khaldi, M. M., & Johnson, J. T. (2020). Geolocation, Calibration and Surface Resolution of CYGNSS GNSS-R Land Observations. Remote Sensing, 12(8), 1317. https://doi.org/10.3390/rs12081317