
Performance Improvement of Spaceborne Carbon Dioxide Detection IPDA LIDAR Using Linearty Optimized Amplifier of Photo-Detector

 , ,
, ,
Abstract
:1. Introduction
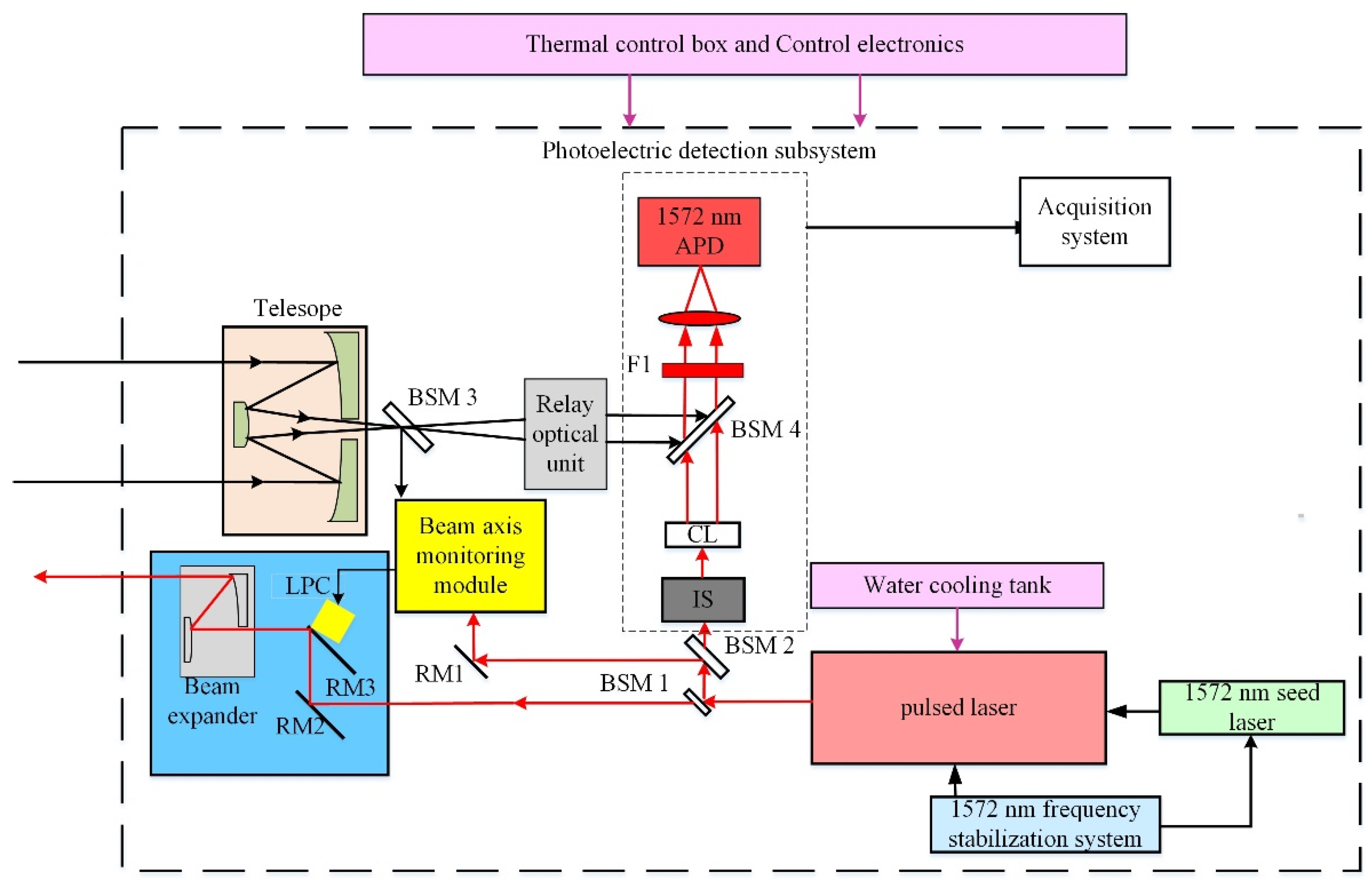
2. Spaceborne IPDA LIDAR Instrument and Principle
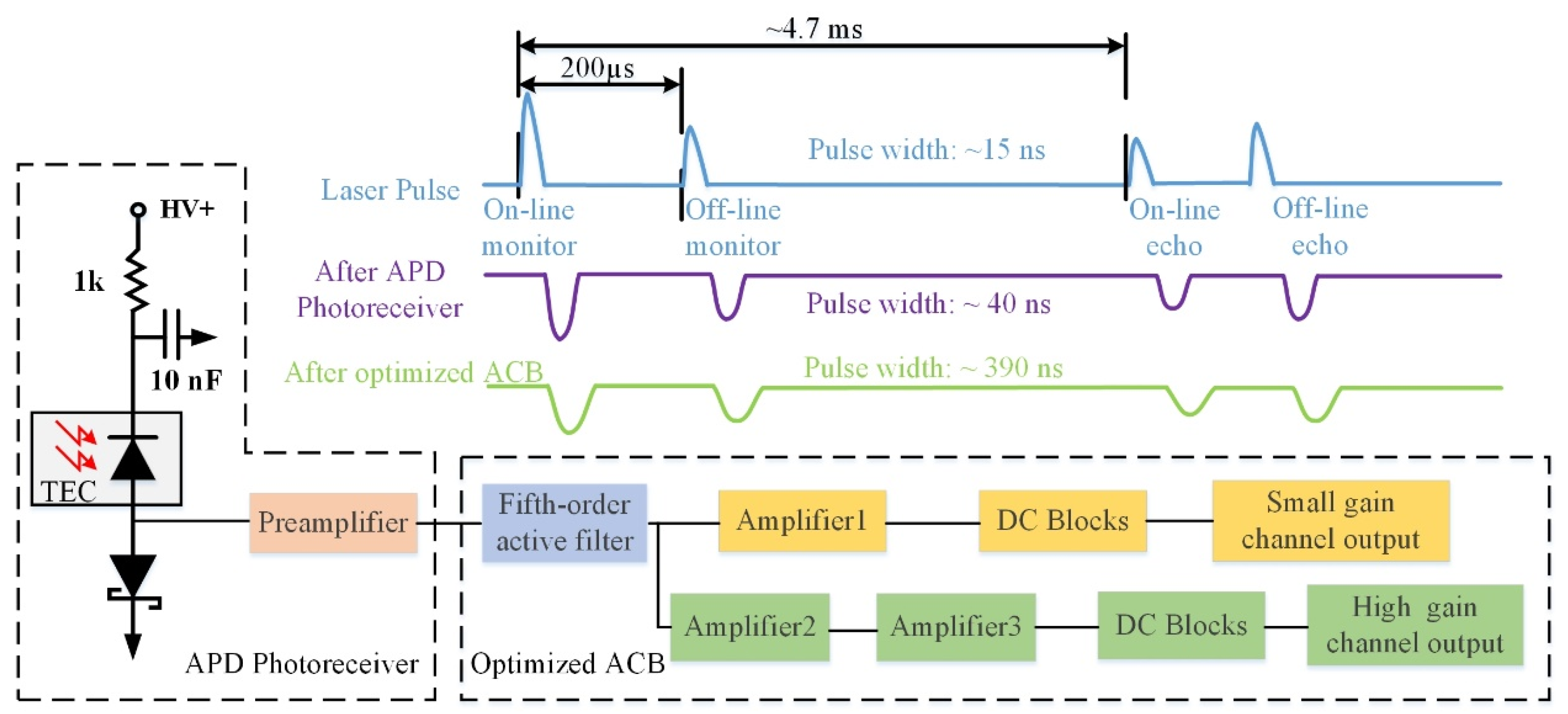
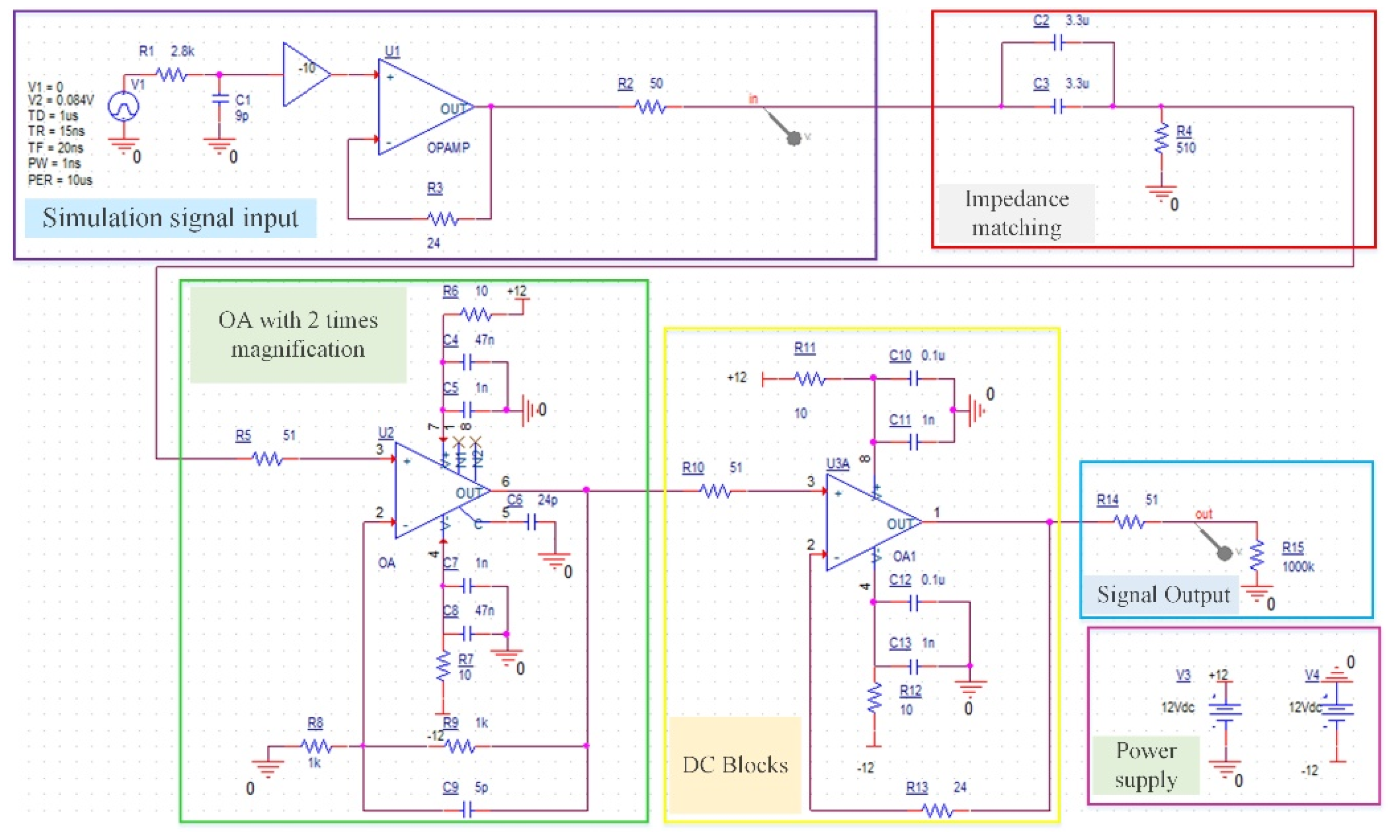
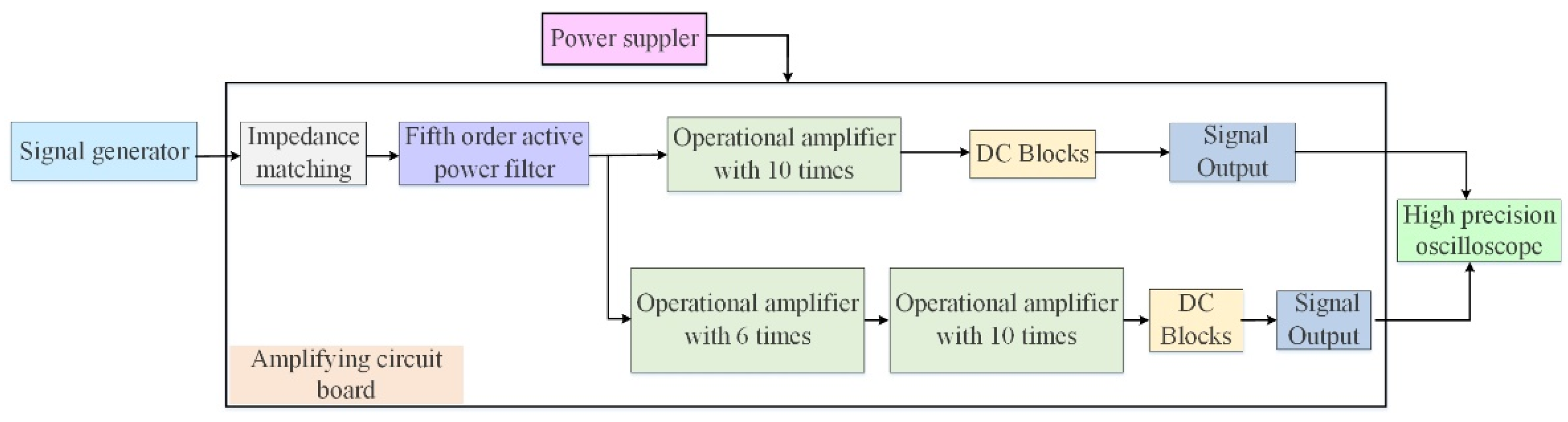
3. Optimization of Linearity and Amplification of the ACB
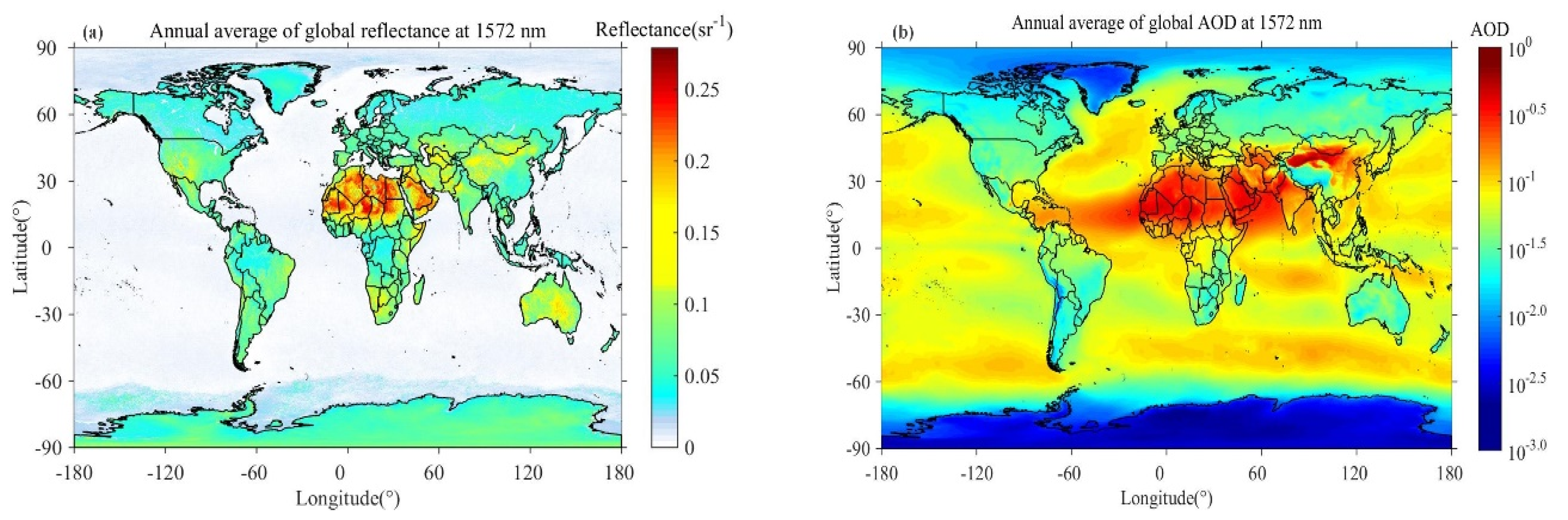
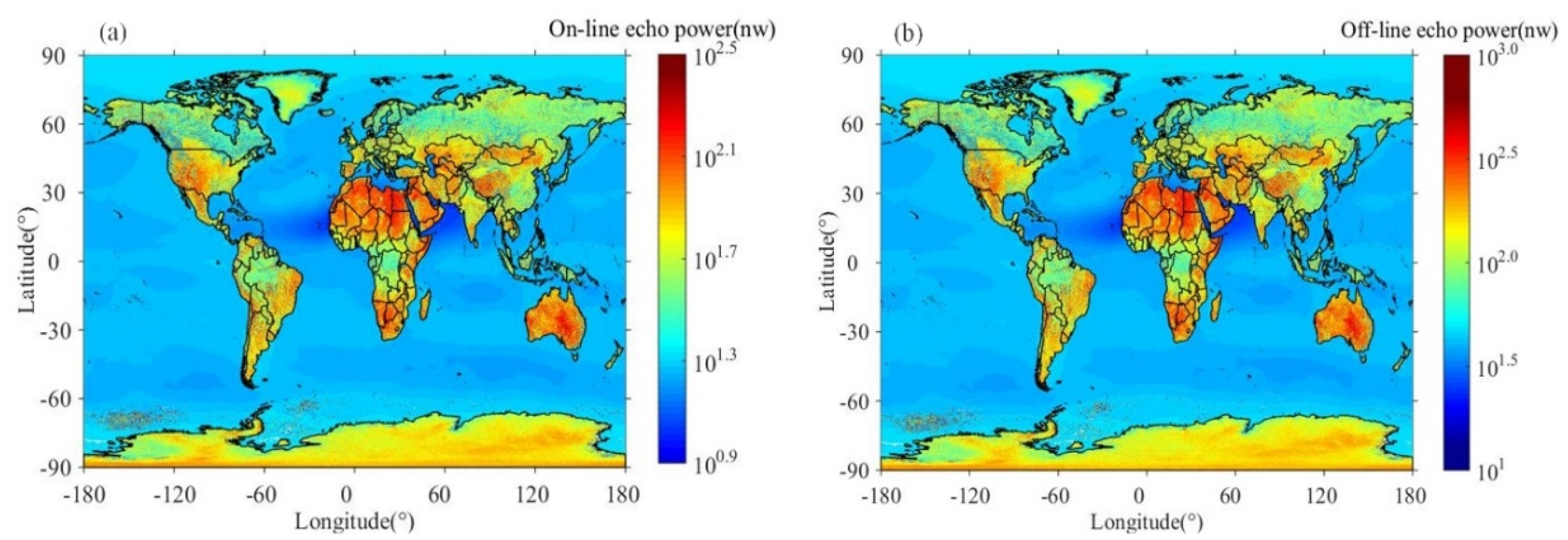
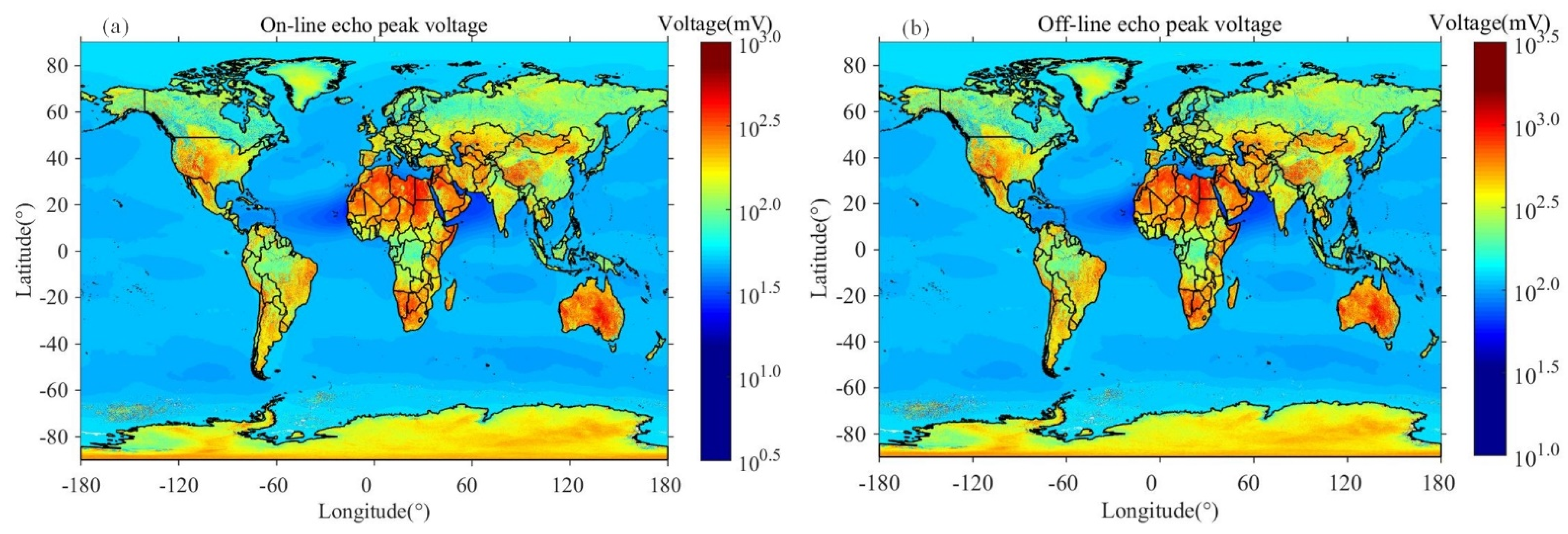
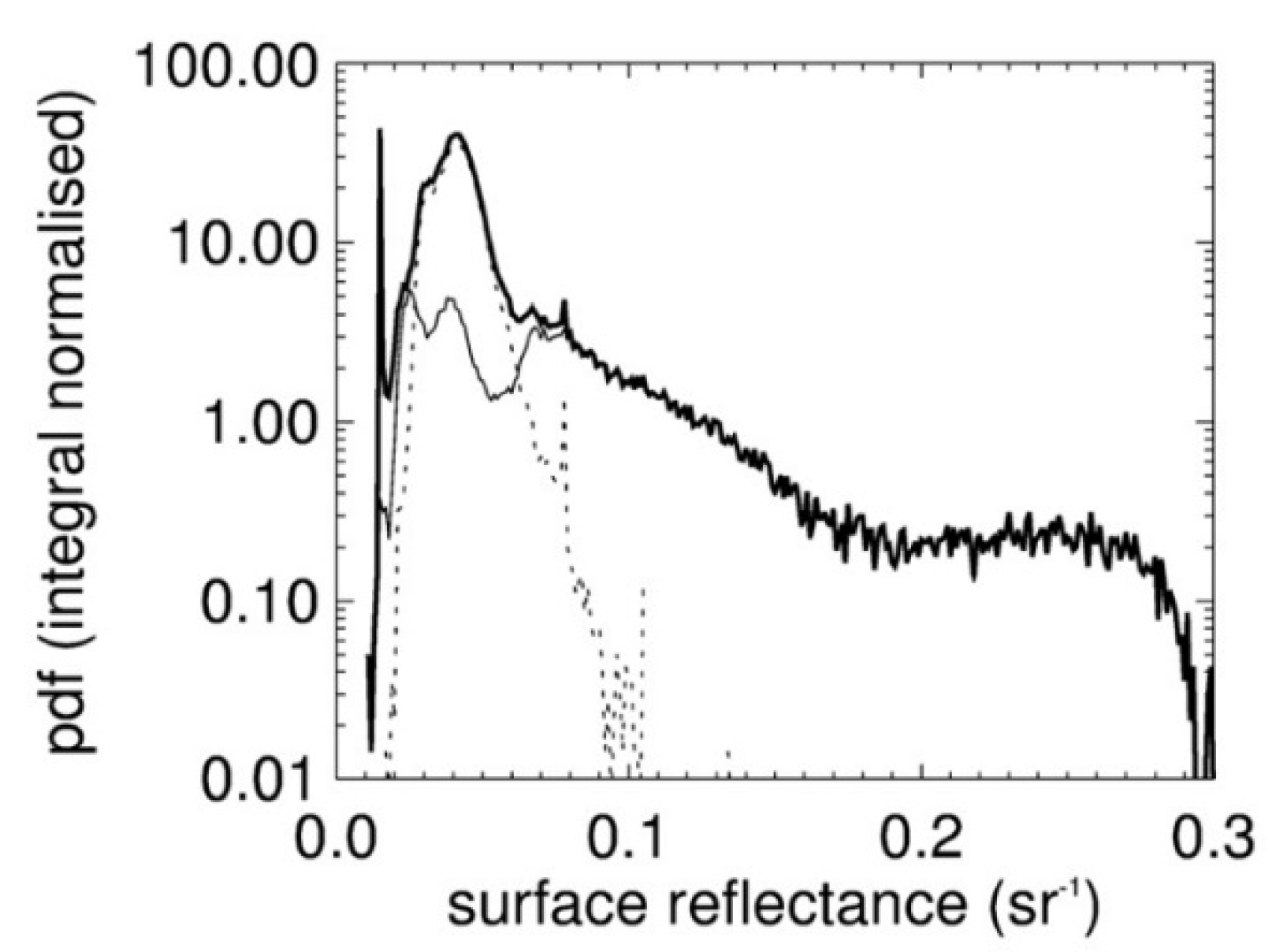
3.1. Dynamic Range of the Global Echo Signal
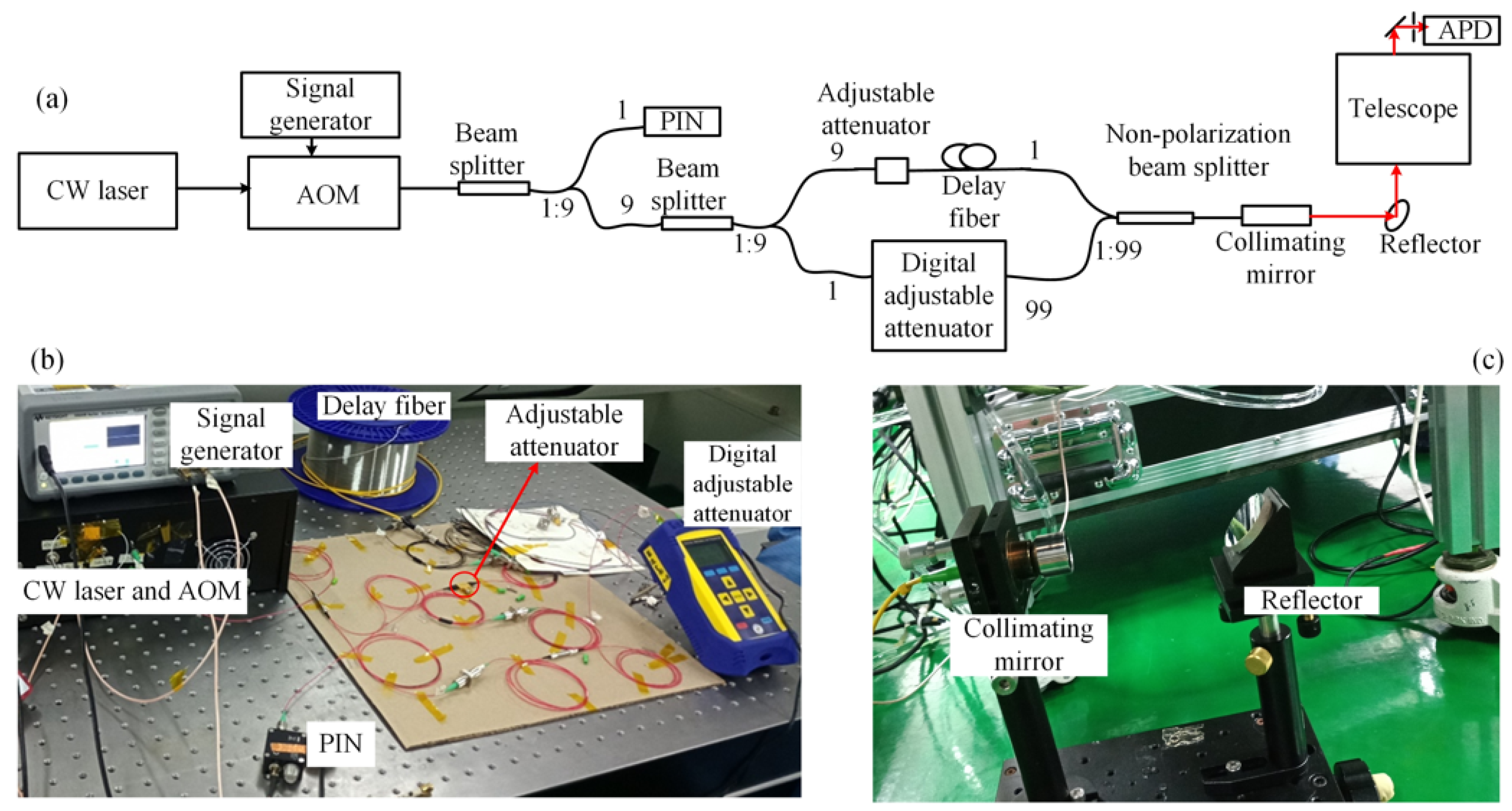
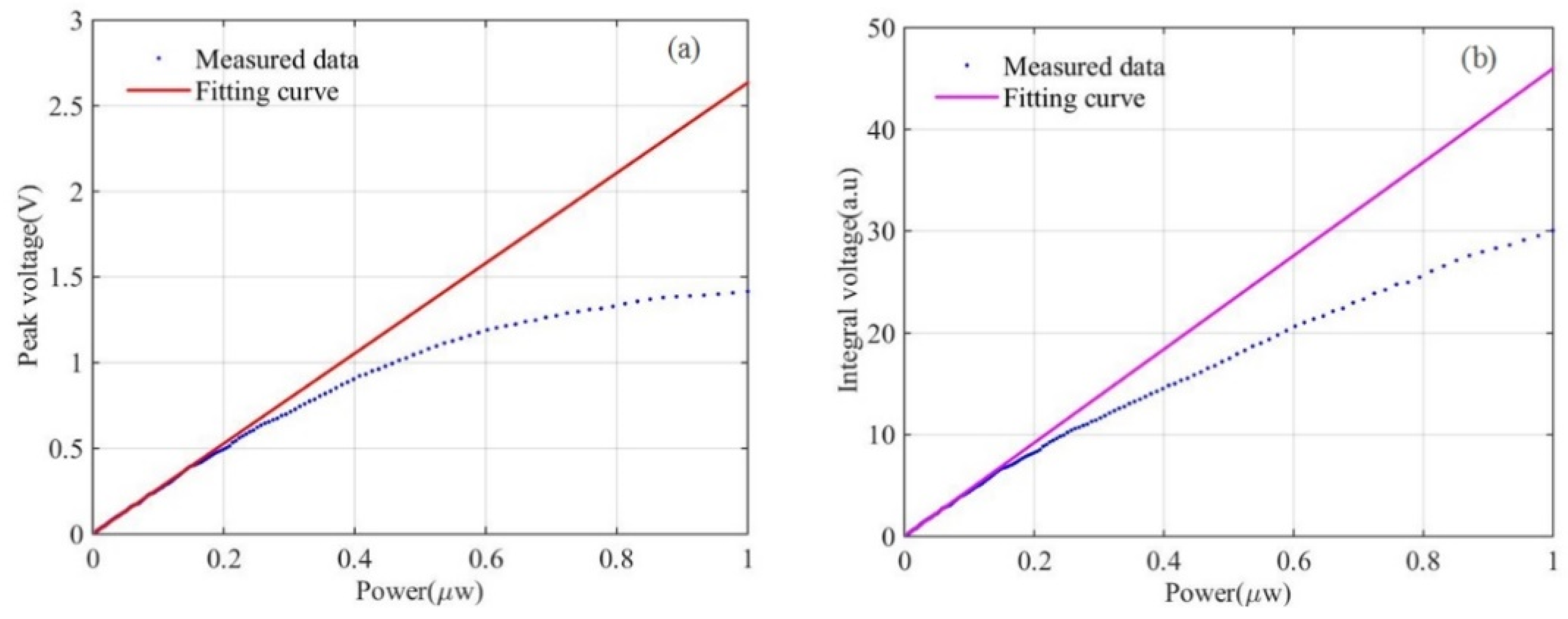
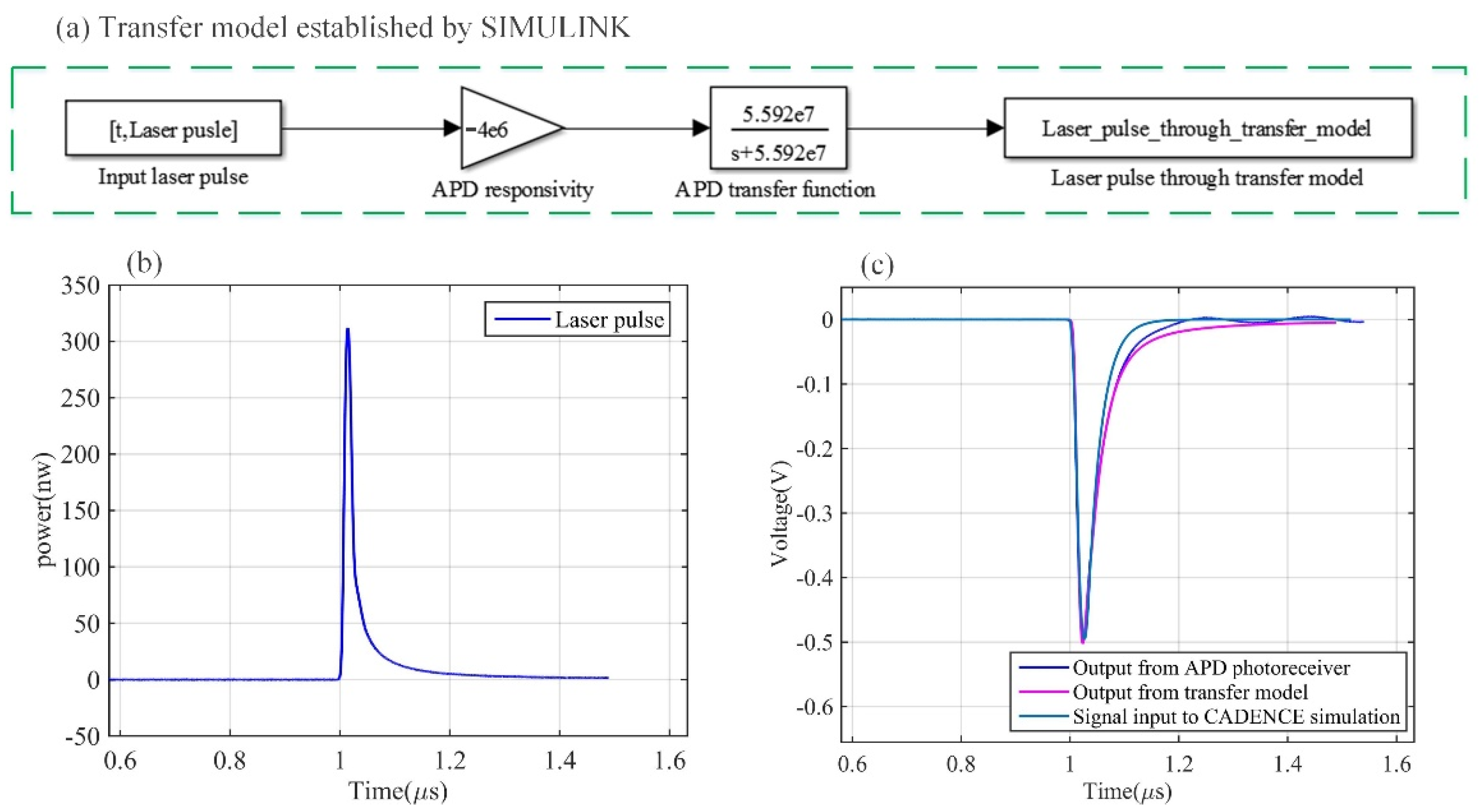
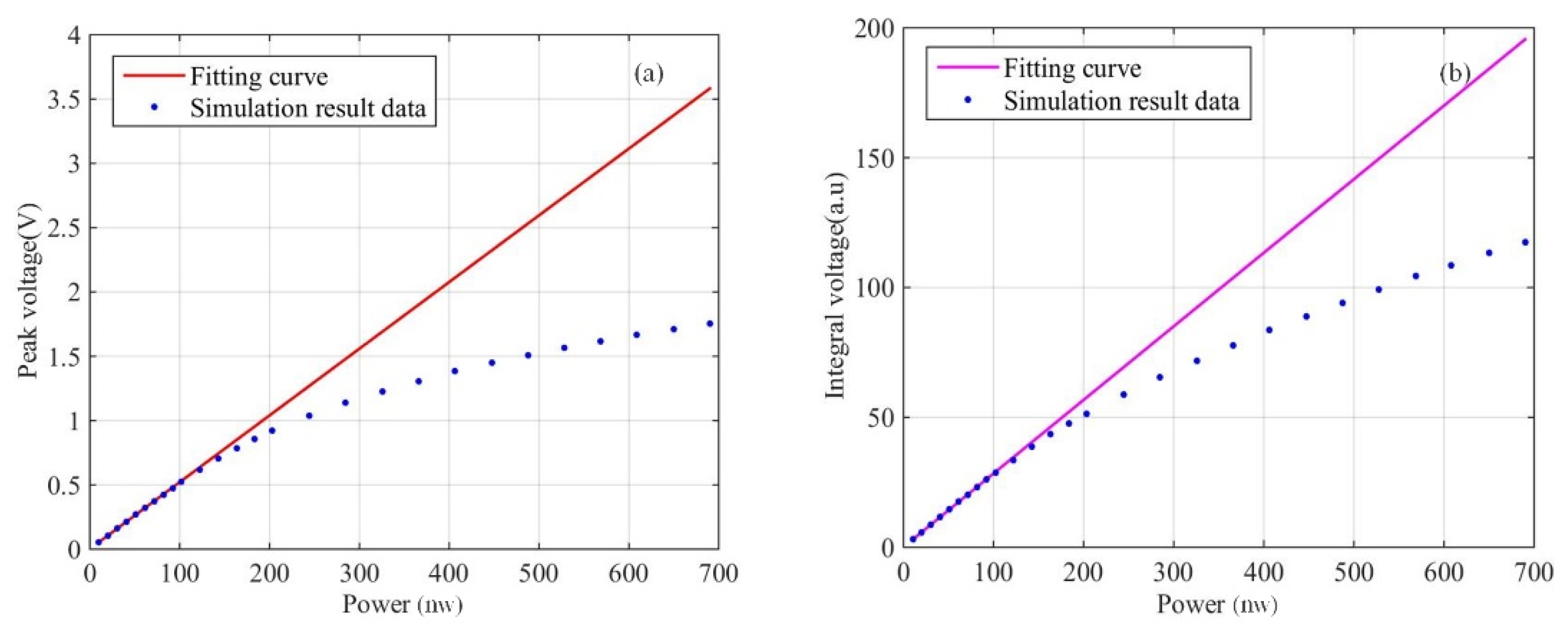
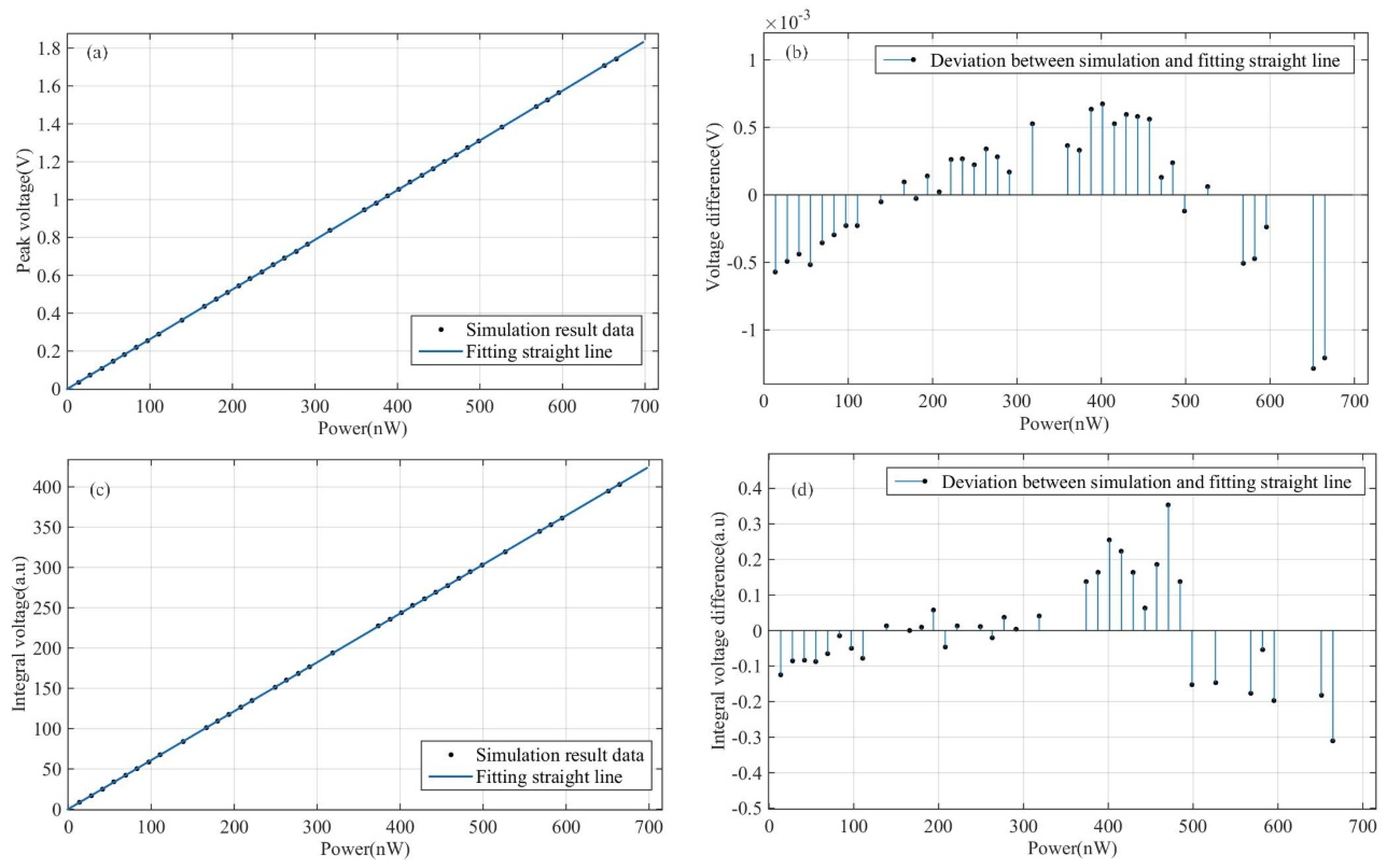
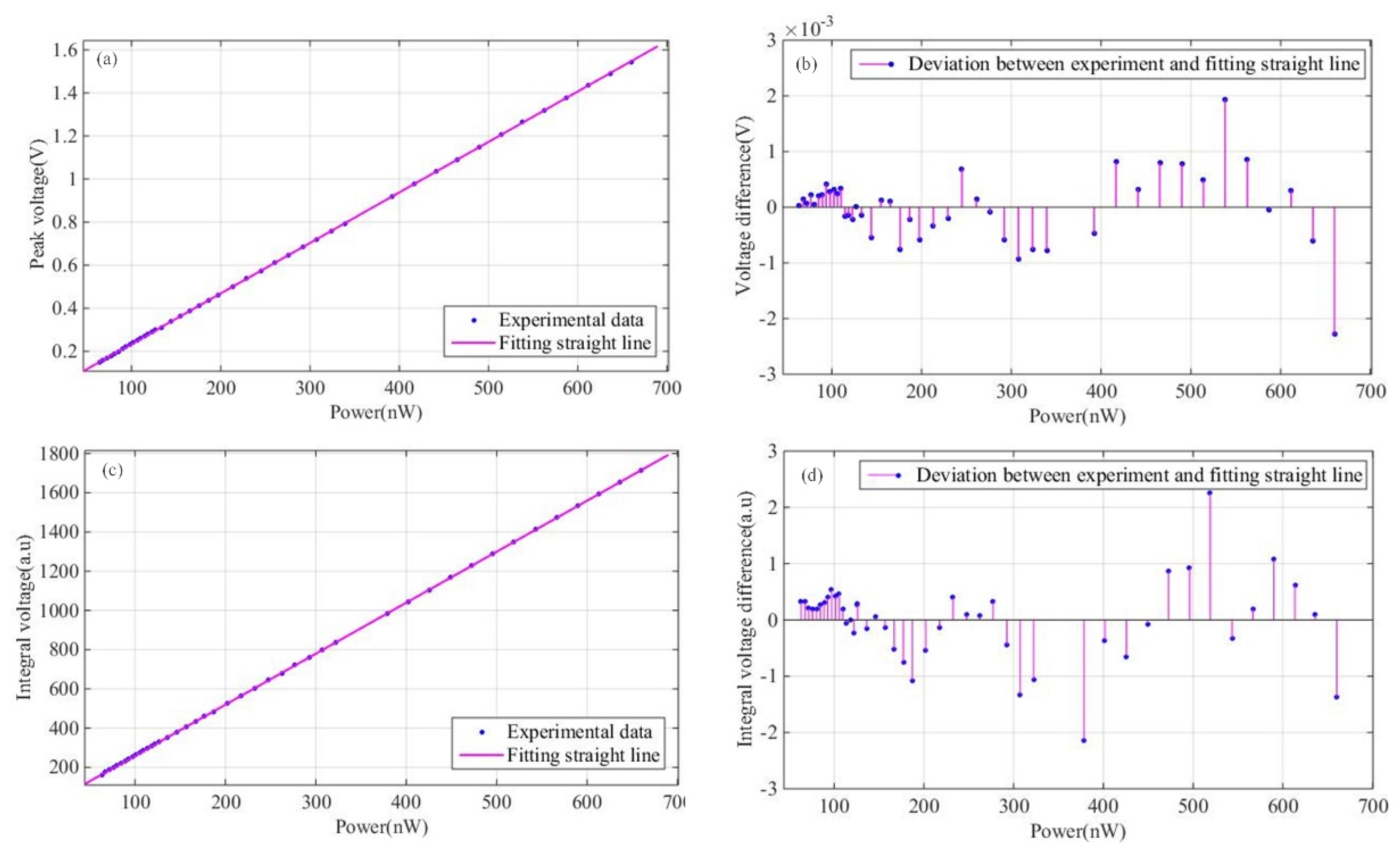
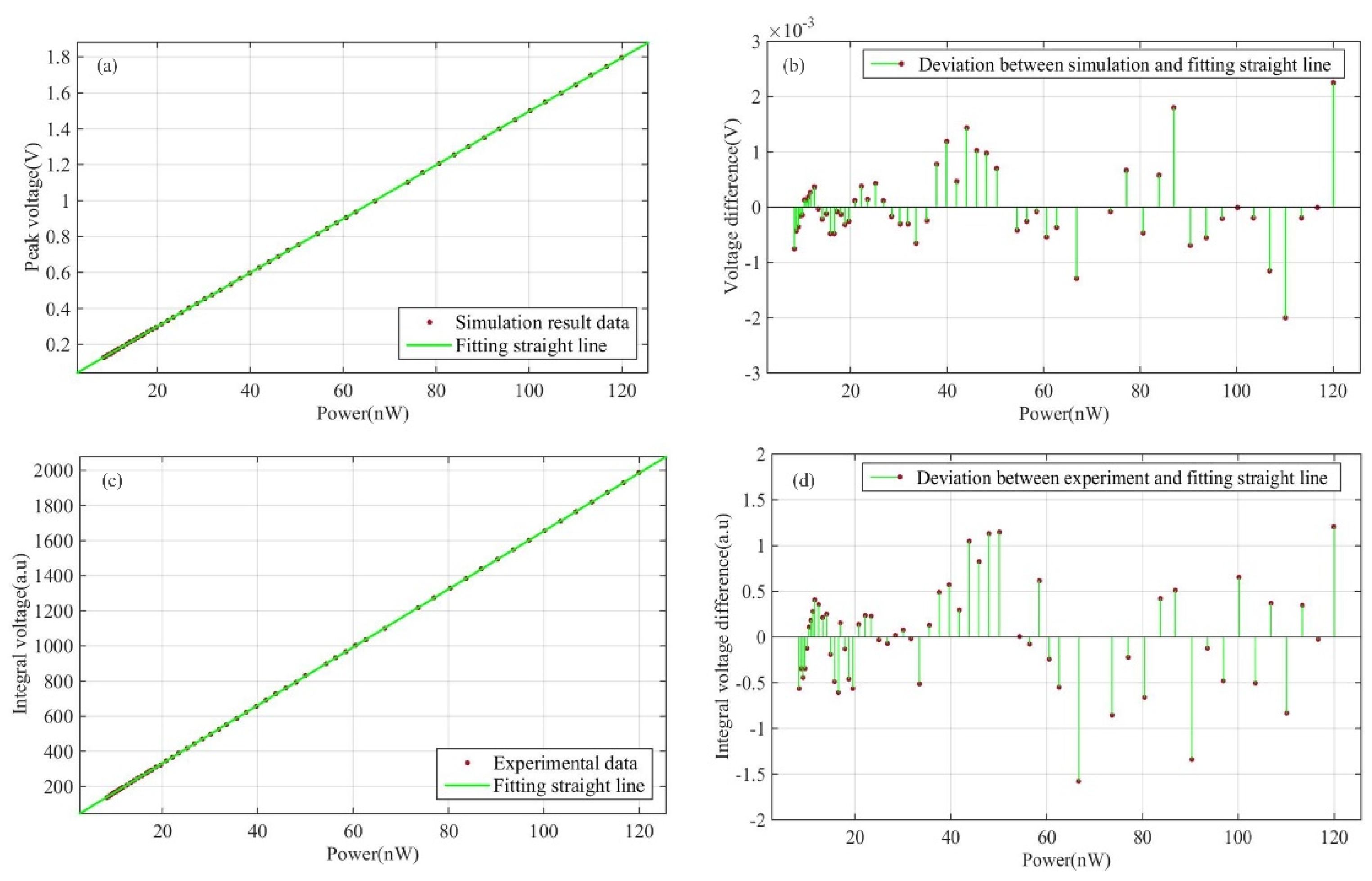
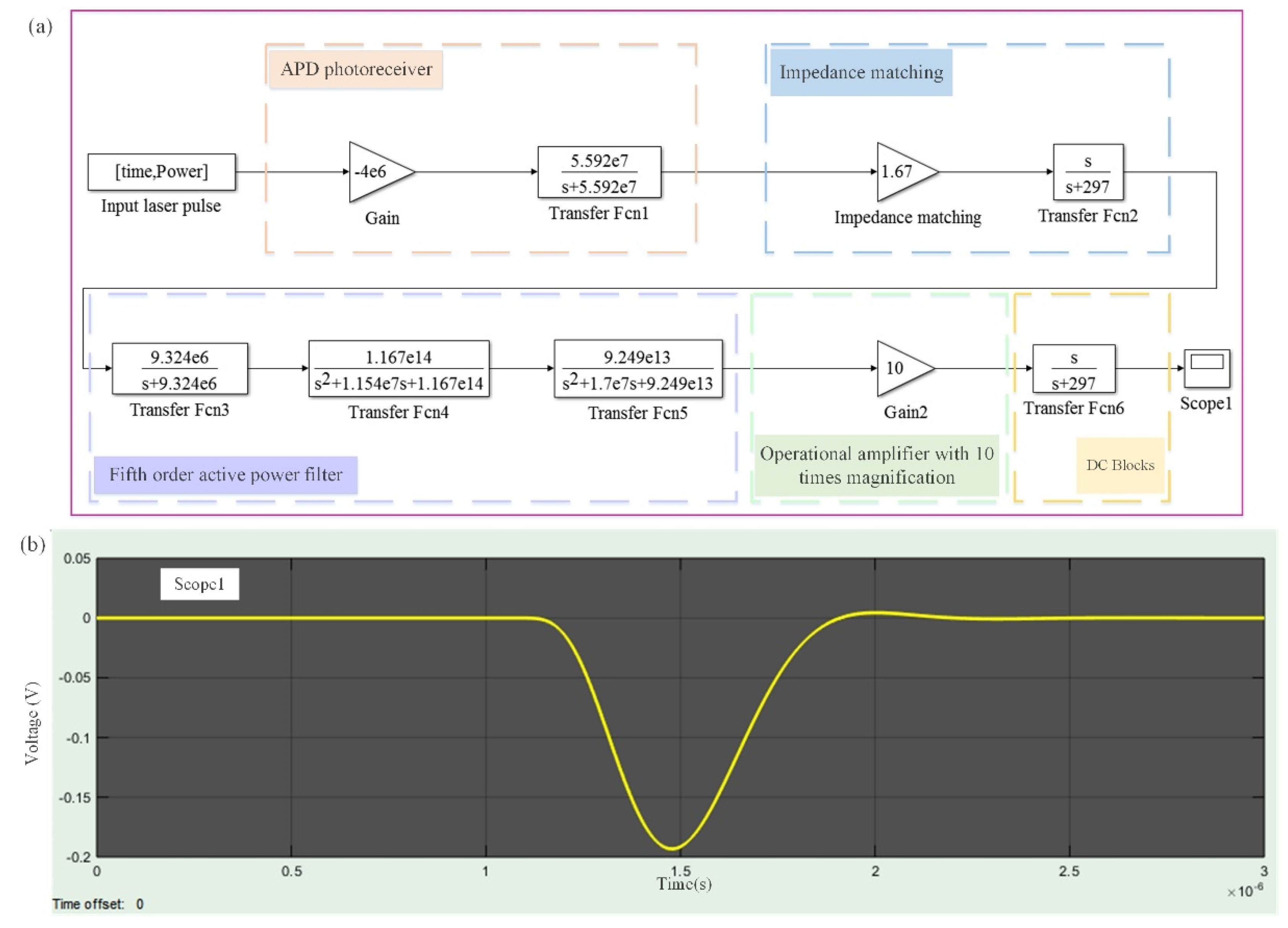
3.2. Linearity Simulation and Test
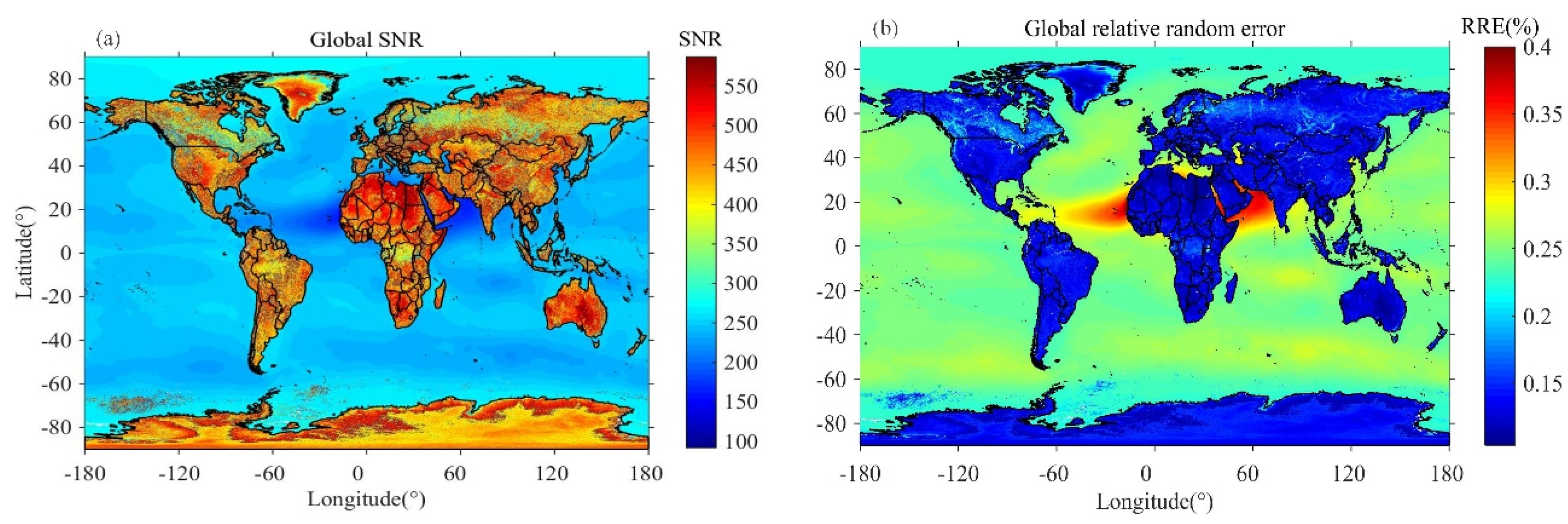
4. System Performance of Spaceborne IPDA LIDAR
5. Discussion
6. Conclusions
7. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pachauri, R.K.; The Core Writing Team; Reisinger, A. Synthesis Report. Contribution of Working Groups I, II and III to the Fourth Assessment Report of the Intergovernmental Panel on Climate Change; Climate Change 2007; IPCC: Geneva, Switzerland, 2007; p. 104. [Google Scholar]
- Stocker, T.F.; Qin, D.; Plattner, G.-K.; Tignor, M.; Allen, S.K.; Boschung, J.; Nauels, A.; Xia, Y.; Bex, V.; Midgley, P.M. The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Climate Change 2013; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013; p. 1535. [Google Scholar]
- Kavaya, M.J.; Menzies, R.T.; Haner, D.A.; Oppenheim, U.P.; Flamant, P.H. Target reflectance measurements for calibration of lidar atmospheric backscatter data. Appl. Opt. 1983, 22, 2619–2628. [Google Scholar] [CrossRef]
- Tans, P.P.; Fung, I.Y.; Takahashi, T. Observational Constraints on the Global Atmospheric CO2 Budget. Science 1990, 247, 1431–1438. [Google Scholar] [CrossRef] [PubMed]
- Fan, S.; Gloor, M.; Mahlman, J.; Pacala, S.; Sarmiento, J.; Takahashi, T.; Tans, P. A large terrestrial carbon sink in North America implied by atmospheric and oceanic carbon dioxide data and models. Science 1998, 282, 442–446. [Google Scholar] [CrossRef] [PubMed]
- NASA ASCENDS Mission Ad-Hoc Science Definition Team. 2015 ASCENDS Mission White Paper. Available online: https://cce.nasa.gov/ascends_2015/ASCENDSFinalDraft81915.pdf (accessed on 19 August 2015).
- Liang, A.L.; Han, G.; Gong, W.; Yang, J.; Xiang, C.Z. Comparison of Global X-CO2 Concentrations From OCO-2 With TCCON Data in Terms of Latitude Zones. IEEE J. Stars 2017, 10, 2491–2498. [Google Scholar] [CrossRef]
- Clissold, P.; European Space Agency. Six candidate Earth Explorer core missions: Reports for assessment: A-SCOPE, BIOMASS, CoReH2O, FLEX, PREMIER, TRAQ. In ESA SP; ESA Communications: Noordwijk, The Netherlands, 2008. [Google Scholar]
- Kawa, R.S.; Abshire, J.B.; Baker, D.F.; Browell, E.V.; Sean, D.C.; Crowell, M.R.; Hyon, J.J.; Jacob, J.C.; Jucks, K.W.; Lin, B.; et al. Active Sensing of CO2 Emissions over Nights, Days, and Seasons (ASCENDS): Final Report of the ASCENDS Ad Hoc Science Definition Team; NASA/TP–2018-219034; 2018; p. 1535. Available online: https://ntrs.nasa.gov/citations/20190000855 (accessed on 16 May 2021).
- Amediek, A.; Fix, A.; Ehret, G.; Caron, J.; Durand, Y. Airborne lidar reflectance measurements at 1.57 mu m in support of the A-SCOPE mission for atmospheric CO2. Atmos. Meas. Tech. 2009, 2, 755–772. [Google Scholar] [CrossRef] [Green Version]
- Abshire, J.B.; Ramanathan, A.; Riris, H.; Mao, J.P.; Allan, G.R.; Hasselbrack, W.E.; Weaver, C.J.; Browell, E.V. Airborne Measurements of CO2 Column Concentration and Range Using a Pulsed Direct-Detection IPDA Lidar. Remote Sens. 2014, 6, 443–469. [Google Scholar] [CrossRef] [Green Version]
- Refaat, T.F.; Singh, U.N.; Yu, J.R.; Petros, M.; Remus, R.; Ismail, S. Double-pulse 2-mu m integrated path differential absorption lidar airborne validation for atmospheric carbon dioxide measurement. Appl. Opt. 2016, 55, 4232–4246. [Google Scholar] [CrossRef] [PubMed]
- Amediek, A.; Ehret, G.; Fix, A.; Wirth, M.; Budenbender, C.; Quatrevalet, M.; Kiemle, C.; Gerbig, C. CHARM-F-a new airborne integrated-path differential-absorption lidar for carbon dioxide and methane observations: Measurement performance and quantification of strong point source emissions. Appl. Opt. 2017, 56, 5182–5197. [Google Scholar] [CrossRef]
- Du, J.; Zhu, Y.D.; Li, S.G.; Zhang, J.X.; Sun, Y.G.; Zang, H.G.; Liu, D.; Ma, X.H.; Bi, D.C.; Liu, J.Q.; et al. Double-pulse 1.57 mu m integrated path differential absorption lidar ground validation for atmospheric carbon dioxide measurement. Appl. Opt. 2017, 56, 7053–7058. [Google Scholar] [CrossRef]
- Yu, J.R.; Petros, M.; Singh, U.N.; Refaat, T.F.; Reithmaier, K.; Remus, R.G.; Johnson, W. An Airborne 2-mu m Double-Pulsed Direct-Detection Lidar Instrument for Atmospheric CO2 Column Measurements. J. Atmos. Ocean. Tech. 2017, 34, 385–400. [Google Scholar] [CrossRef]
- Abshire, J.B.; Ramanathan, A.K.; Riris, H.; Allan, G.R.; Sun, X.L.; Hasselbrack, W.E.; Mao, J.P.; Wu, S.; Chen, J.; Numata, K.; et al. Airborne measurements of CO2 column concentrations made with a pulsed IPDA lidar using a multiple-wavelength-locked laser and HgCdTe APD detector. Atmos. Meas. Tech. 2018, 11, 2001–2025. [Google Scholar] [CrossRef] [Green Version]
- Mao, J.P.; Ramanathan, A.; Abshire, J.B.; Kawa, S.R.; Riris, H.; Allan, G.R.; Rodriguez, M.; Hasselbrack, W.E.; Sun, X.L.; Numata, K.; et al. Measurement of atmospheric CO2 column concentrations to cloud tops with a pulsed multi-wavelength airborne lidar. Atmos. Meas. Tech. 2018, 11, 127–140. [Google Scholar] [CrossRef] [Green Version]
- Han, G.; Ma, X.; Liang, A.L.; Zhang, T.H.; Zhao, Y.N.; Zhang, M.; Gong, W. Performance Evaluation for China’s Planned CO2-IPDA. Remote Sens. 2017, 9, 768. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.B.; Ke, J.; Chen, S.J.; Zheng, Z.F.; Cheng, C.H.; Tong, B.W.; Liu, J.Q.; Liu, D.; Chen, W.B. Performance Evaluation of Spaceborne Integrated Path Differential Absorption Lidar for Carbon Dioxide Detection at 1572 nm. Remote Sens. 2020, 12, 2570. [Google Scholar] [CrossRef]
- Zhu, Y.D.; Yang, J.X.; Chen, X.; Zhu, X.P.; Zhang, J.X.; Li, S.G.; Sun, Y.G.; Hou, X.; Bi, D.C.; Bu, L.B.; et al. Airborne Validation Experiment of 1.57-mu m Double-Pulse IPDA LIDAR for Atmospheric Carbon Dioxide Measurement. Remote Sens. 2020, 12, 1999. [Google Scholar] [CrossRef]
- Huang, J.C.; Wang, L.K.; Duan, Y.F.; Huang, Y.F.; Ye, M.F.; Liu, L.; Li, T. All-fiber-based laser with 200 mHz linewidth. Chin. Opt. Lett. 2019, 17. [Google Scholar] [CrossRef]
- Chen, X.T.; Jiang, Y.Y.; Li, B.; Yu, H.F.; Jiang, H.F.; Wang, T.; Yao, Y.; Ma, L.S. Laser frequency instability of 6x10(-16) using 10-cm-long cavities on a cubic spacer. Chin. Opt. Lett. 2020, 18. [Google Scholar] [CrossRef]
- Du, J.; Sun, Y.G.; Chen, D.J.; Mu, Y.J.; Huang, M.J.; Yang, Z.G.; Liu, J.Q.; Bi, D.C.; Hou, X.; Chen, W.B. Frequency-stabilized laser system at 1572 nm for space-borne CO2 detection LIDAR. Chin. Opt. Lett. 2017, 15, 31401–31405. [Google Scholar]
- Chen, X.; Zhu, X.L.; Li, S.G.; Ma, X.H.; Xie, W.; Liu, J.Q.; Chen, W.B.; Zhu, R. Frequency Stabilization of Pulsed Injection-Seeded OPO Based on Optical Heterodyne Technique. Chin. Phys. Lett. 2018, 35. [Google Scholar] [CrossRef]
- Ehret, G.; Kiemle, C.; Wirth, M.; Amediek, A.; Fix, A.; Houweling, S. Space-borne remote sensing of CO2, CH4, and N2O by integrated path differential absorption lidar: A sensitivity analysis. Appl. Phys. B 2008, 90, 593–608. [Google Scholar] [CrossRef] [Green Version]
- Liang, Y.; Fei, Q.L.; Liu, Z.H.; Huang, K.; Zeng, H.P. Low-noise InGaAs/InP single-photon detector with widely tunable repetition rates. Photonics Res. 2019, 7, A1–A6. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Tan, X.; Wang, Y.G.; Song, X.B.; Han, T.T.; Li, J.; Lu, W.L.; Gu, G.D.; Liang, S.X.; Lu, Y.J.; et al. High-performance 4H-SiC p-i-n ultraviolet avalanche photodiodes with large active area. Chin. Opt. Lett. 2019, 17. [Google Scholar] [CrossRef]
- Refaat, T.F.; Singh, U.N.; Yu, J.R.; Petros, M.; Ismail, S.; Kavaya, M.J.; Davis, K.J. Evaluation of an airborne triple-pulsed 2 mu m IPDA lidar for simultaneous and independent atmospheric water vapor and carbon dioxide measurements. Appl. Opt. 2015, 54, 1387–1398. [Google Scholar] [CrossRef] [PubMed]
- Disney, M.I.; Lewis, P.E.; Bouvet, M.; Prieto-Blanco, A.; Hancock, S. Quantifying Surface Reflectivity for Spaceborne Lidar via Two Independent Methods. IEEE Trans. Geosci. Remote. Sens. 2009, 47, 3262–3271. [Google Scholar] [CrossRef]
- Yang, J.X.Z.; Wang, Q.; Bu, L.B.; Liu, J.Q.; Wei, B.C. Effects of surface reflectance and aerosol optical depth on the performance of spaceborne path integral differential absorption lidar. China Laser J. 2019, 46, 266–274. [Google Scholar]
- Gordon, I.E.; Rothman, L.S.; Hill, C.; Kochanov, R.V.; Tan, Y.; Bernath, P.F.; Birk, M.; Boudon, V.; Campargue, A.; Chance, K.V.; et al. The HITRAN2016 molecular spectroscopic database. J. Quant. Spectrosc. Radiat. 2017, 203, 3–69. [Google Scholar] [CrossRef]
- Han, G.; Xu, H.; Gong, W.; Liu, J.Q.; Du, J.; Ma, X.; Liang, A.L. Feasibility Study on Measuring Atmospheric CO2 in Urban Areas Using Spaceborne CO2-IPDA LIDAR. Remote Sens. 2018, 10, 985. [Google Scholar] [CrossRef] [Green Version]
- Kiemle, C.; Quatrevalet, M.; Ehret, G.; Amediek, A.; Fix, A.; Wirth, M. Sensitivity studies for a space-based methane lidar mission. Atmos. Meas. Tech. 2011, 4, 2195–2211. [Google Scholar] [CrossRef] [Green Version]
- Kiemle, C.; Kawa, S.R.; Quatrevalet, M.; Browell, E.V. Performance simulations for a spaceborne methane lidar mission. J. Geophys. Res. Atmos. 2014, 119, 4365–4379. [Google Scholar] [CrossRef] [Green Version]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Parameter | Value |
|---|---|---|
| 1572 nm Laser Transmitter | Wavelength (On-/offline) | 1572.024/1572.085 nm |
| Energy (On-/offline) | 75/35 mJ | |
| Pulse width | 15 ns | |
| Repetition frequency | 20 Hz | |
| Pulse separation | 200 μs | |
| Linewidth | 30 MHz | |
| Frequency stability | 0.6 MHz | |
| Spectral purity (OPA) | 0.9995 | |
| Transceiver optics | Emission optical efficiency | 0.9558 |
| Beam divergence | 100 μrad | |
| Energy monitoring accuracy | 0.9993 | |
| Receiver optical efficiency | 0.7186 | |
| Telescope diameter | 1 m | |
| Field of view | 0.2 mrad | |
| Optical filter bandwidth | 0.45 nm | |
| APD Photoreceivers | Detector type | InGaAs APD |
| Responsivity | 4 MV/W@M = 10&RL = 50 Ω) | |
| APD NEP | 33 fw/√Hz (@5 °C) | |
| Excess noise factor | 5.5 (@M = 10) | |
| APD Bandwidth | 8.9 MHz | |
| ACB | Small gain channel | 10 times |
| High gain channel | 60 times | |
| Bandwidth | 1 MHz | |
| NEP at 10 times | 38 nV/√Hz | |
| Data acquisition (DA) | Sampling rate for 1572 nm | 50 MS/s |
| Effective numbers of bit | 11 bits | |
| Voltage range | 2 V | |
| Satellite Platform | Orbit altitude | 705 km |
| Spatial resolution of land | 50 km | |
| Spatial resolution of sea | 100 km |
| Laser pulse (@M = 10, F = 10) | Peak Voltage | Unit |
|---|---|---|
| Online monitoring | 1.40 | V |
| Offline monitoring | 0.70 | |
| Online echo | 0.025–0.78 | |
| Offline echo | 0.055–1.70 | |
| Noise (@M = 10, T = 5 °C, F = 10) | STD | Unit |
| Signal noise | 1.40–12.0 | mV |
| Background noise | 0.39–1.80 | |
| APD photoreceiver noise | 2.00 | |
| ACB noise | 0.38 | |
| Quantization noise | 0.98 |
| RRE (%) | Proportion | |
|---|---|---|
| >0.3 | >1.2 | 1.12% |
| 0.25–0.3 | 1.0–1.2 | 25.66% |
| 0.15–0.25 | 0.6–1.0 | 47.38% |
| <0.15 | <0.6 | 25.84% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Yang, J.; Zhang, X.; Liu, J.; Zhu, X.; Zang, H.; Xia, T.; Fan, C.; Chen, X.; Sun, Y.; et al. Performance Improvement of Spaceborne Carbon Dioxide Detection IPDA LIDAR Using Linearty Optimized Amplifier of Photo-Detector. Remote Sens. 2021, 13, 2007. https://doi.org/10.3390/rs13102007
Zhu Y, Yang J, Zhang X, Liu J, Zhu X, Zang H, Xia T, Fan C, Chen X, Sun Y, et al. Performance Improvement of Spaceborne Carbon Dioxide Detection IPDA LIDAR Using Linearty Optimized Amplifier of Photo-Detector. Remote Sensing. 2021; 13(10):2007. https://doi.org/10.3390/rs13102007
Chicago/Turabian StyleZhu, Yadan, Juxin Yang, Xiaoxi Zhang, Jiqiao Liu, Xiaopeng Zhu, Huaguo Zang, Tengteng Xia, Chuncan Fan, Xiao Chen, Yanguang Sun, and et al. 2021. "Performance Improvement of Spaceborne Carbon Dioxide Detection IPDA LIDAR Using Linearty Optimized Amplifier of Photo-Detector" Remote Sensing 13, no. 10: 2007. https://doi.org/10.3390/rs13102007
APA StyleZhu, Y., Yang, J., Zhang, X., Liu, J., Zhu, X., Zang, H., Xia, T., Fan, C., Chen, X., Sun, Y., Hou, X., & Chen, W. (2021). Performance Improvement of Spaceborne Carbon Dioxide Detection IPDA LIDAR Using Linearty Optimized Amplifier of Photo-Detector. Remote Sensing, 13(10), 2007. https://doi.org/10.3390/rs13102007