1. Introduction
Unexploded ordnance (UXO) is a product left over from a war, usually buried within 30 m underground [
1,
2]. With the expansion of human activities, potential unexploded ordnances pose a serious threat to the lives of residents, the living environment, and the economic development of society. Since the middle of the 19th century, countries around the world have been actively carrying out the detection and removal of UXO [
3]. At present, multiple geophysical techniques including magnetic method [
4,
5,
6], electromagnetic method [
7,
8] and ground penetrating radar (GPR) [
9,
10] are applied in the detection of UXO, and there are already a variety of prototypes and commercial products designed for the locating and identifying of UXO.
Magnetic survey is a kind of passive detection technique. Affected by the magnetization effect of the geomagnetic field, the ferromagnetic target produces an induced magnetic field, causing a local magnetic anomaly field [
3]. Various types of scalar or vector magnetic field sensors are fixed on different carrier platforms, forming the handheld [
11,
12], helicopter-borne [
13] and UAV-mounted magnetic measurement systems [
14,
15]. The drone-based magnetic detection system shows significant advantages in detection efficiency and spatial resolution of the magnetic data [
16], which is a hot spot of current research.
Electromagnetic method is divided into two categories: Time Domain Electromagnetic Method (TDEM) and Frequency Domain Electromagnetic Method (FDEM), both of which consist of transmitting and receiving. The transmitter emits the primary field by controlling the current of the transmitting coil, and the receiver picks up the secondary field, which is an induced magnetic field produced by the metal target. Typical commercial products, such as EM61, EM61-MK2A [
7], EM63-3D [
8], and MPV-II [
17], have been widely used in UXO detection, underground cable detection, archaeology, etc. Similarly, the UAV-based EM detection system [
18,
19,
20] has attracted extensive interests, and the research and integration of the UAV-TEM system is more difficult than the UAV-magnetic system [
21], but it is bound to play an important role in geological work with its advantages in low-altitude detection.
The detection and identification of UXO remains an ongoing challenge due to the limitations of terrain, the material of UXO and various clutters, a single detection technique cannot achieve the best detection performance. Magnetic detection has remarkable advantages in fast monitoring and large-scale survey, but it can only detect targets with high magnetic permeability. Moreover, it is difficult to quantitatively retrieve the shape and attitude information of the target based on the magnetic field data. In contrast, the electromagnetic method is able to detect metal targets including magnetic and non-magnetic, and the conductivity, magnetic permeability, shape, position, and attitude of the target can be inverted based on the rate of decay and spatial behavior of the secondary field [
22,
23,
24]. However, the EM method is more complex and time consuming, and its detection distance is shallower than that of magnetic detection [
23]. The new detection mode of combined magnetic and electromagnetic method has emerged as an interesting candidate [
23,
24,
25,
26]. Joint detection and inversion take advantage of the strengths of both techniques to help improve the detection efficiency and target recognition capabilities.
In terms of joint detection systems, a variety of combined modes based on vehicle, airborne or handheld have been developed and tested. GEO-CENTERS, Inc., in Masschusetts, U.S.A and the U. S. Army Corps of Engineers developed a vehicle-mounted joint detection system, one Geonics EM61 pulse induction sensor and multiple Geometrics 822A magnetometers were simultaneously towed by a non-magnetic cart [
24]. A sophisticated sampling scheme was proposed to eliminate the electromagnetic interference of EM61 to the magnetometer, the magnetic data and EM61 data are synchronized in space based on the position information measured by GPS. The UXO detection tests at the Calibration Grid and the Blind Test Grid have verified that the detection efficiency of the combined vehicle-towed system has been improved significantly and the joint detection system performed well when the two targets are closely distributed. Jacob Sheehan et al. [
25] designed a joint detection system based on the helicopter flying platform for the large-scale detection of UXO. The VG-22 and TEM8 systems were, respectively, integrated on the Bell 206 Long Ranger helicopter. The VG-22 system collected the vertical gradient magnetic field, seven vertical gradient pods are integrated on the forearm of the aircraft, and each gradient pod contains two cesium vapor magnetometers vertically separated by 50 cm. The TEM8 system collected the secondary field through eight receiving coils fixed under the aircraft. Experimental results indicated that the combined detection could reduce the false alarm rate. Kenji Okazaki et al. used an airborne electromagnetic system (GREATEM) and a helicopter-borne magnetic system (HMS) to delineate the geological structures of long tunnel construction sites planned in the Otoineppu area of Hokkaido, Japan [
26]. The GREATEM survey and HMS survey were carried out successively, obtaining the resistivity distribution map and magnetic anomaly map of the same test area. This combined survey provides richer information for the effective interpretation of underground structures.
In terms of cooperative interpretation of data, different methods for joint processing of magnetic field and electromagnetic data have been proposed. Jacob Sheehan [
24] used the normalization and DC removal method to ensure that the aerial magnetic data and the aerial electromagnetic data are comparable, and the detection results of the two methods are merged together, achieving the “Decision Fusion” [
27]. Leonard R. Pasion et al. proposed a cooperative inversion method, where information from the inversion of magnetic data is used as a constraint for inverting TDEM data [
23]. The cooperative inversion consists of three steps: the first is the inversion of the magnetic data, the second is the inversion of TEM data with location constraints, and finally to estimate the shape and size of target from the magnetic data. The field tests at Yuma Proving Ground have confirmed that this cooperative interpretation performed better than the single inversion method in target classification and recognition.
Due to the limitations of mutual interference between systems, data fusion methods and the cost, the existing joint detection system and interpretation method are still in the early stage and not yet mature. For the helicopter-based joint detection systems, the spatial resolution of aerial data is much greater than that of terrestrial data, and a fine survey in small areas cannot be achieved. At the same time, low-altitude flight by a helicopter places high demand on pilots, which is a severe challenge. For the vehicle-mounted joint detection system, it is difficult to completely eliminate the influence of the primary field emitted by the electromagnetic detection system on the magnetometer, and the detection efficiency of the vehicle-mounted system is relatively low. In contrast, UAV flight platform is a good compromise to improve detection efficiency and spatial resolution and is able to fly autonomously at a low altitude.
In this paper, a newly developed joint detection system is introduced, a multi-rotor UAV-based magnetic detection system (UAVMAG) and a cart-based time-domain electromagnetic detection system (TDEM-Cart) are combined; and the complete joint processing flow is proposed for the detection and discrimination of UXO. Two detection modes are designed, one is full-coverage survey mode, and the other is cued survey mode. In the full-coverage survey mode, the same test area is scanned by UAVMAG and TDEM-Cart, respectively, ensuring that non-magnetic metal targets will not be missed. In the cued survey mode, UAVMAG system first quickly scans the entire test area, and a series of data processing methods are used to delineate the abnormal areas where the target might be, providing “clues” for the subsequent detection by TDEM-Cart. Next, the local abnormal area is finely surveyed through the TDEM-Cart, instead of covering the entire test area, thereby improving the detection efficiency. Furthermore, the cooperative data interpretation method is presented, magnetic data and electromagnetic data (EM data) are spatially synchronized by the Real-Time Kinematic Global Positioning System (RTK GPS) system, and the synchronization deviation is cm level. Before the quantitative interpretation of data, some data processing methods are adopted to improve the quality of magnetic field and EM data. The global optimization algorithm differential evolution (DE) is employed in the inversion of magnetic data, the local optimization method Levenberg–Marquardt (LM) is used in the inversion of EM data, and the feature vector retrieved from the magnetic data is set as the initial value of the electromagnetic data inversion. The joint interpretation can avoid falling into the local optimal solution, the positioning accuracy of the target is higher than the magnetic inversion result, and the information of the merged feature vector is richer, which is helpful to distinguish and recognize the target.
The paper is organized as follows.
Section 2 introduces the composition of the joint detection system, including the basic structure of UAVMAG and TDEM-Cart.
Section 3 proposes the cooperative interpretation of magnetic data and EM data for target positioning and recognition. Two experiments are conducted, and the results are discussed in
Section 4.
Section 5 gives the discussion and remarks of the joint detection system and processing method.
Section 6 provides the conclusions of this research.
3. Methods
The joint data processing flow is divided into four parts, the first part is the magnetic field signal processing, the second part is the inversion of magnetic data, the third part is the EM data processing, and the fourth is the inversion of EM data. The signal processing algorithm is executed before the inversion operation, which is used to extract the magnetic anomaly field or the secondary field signal related to the target, eliminating the noise signal and improving the data quality and signal-to-noise ratio (SNR). The fused feature vector containing the location, shape and posture information of the target is retrieved from the inversion results to locate and distinguish the target. The four parts are explained in detail below.
3.1. Magnetic Field Signal Processing
The measured result of the magnetic field sensor fixed on the UAV is the superposition of the geomagnetic field, the interference magnetic field generated by the flying platform, environmental noise, and the magnetic anomaly signal related to the target. What we are interested in is the magnetic anomaly signal; therefore, it is necessary to separate the magnetic anomaly signal from the measured magnetic field signal through a variety of signal processing methods.
3.1.1. Lowpass Filtering
In frequency domain, the energy of magnetic anomaly signals generated by a static metal target is mainly concentrated in low frequencies, lower than 1 Hz [
29], and low-pass filter is able to remove the high-frequency noise, such as the AC magnetic field generated by the power grid. A digital low-pass filter with the cut-off frequency of 3 Hz is designed, cancelling the high-frequency noise from the measured magnetic field signal.
Figure 3 displays the frequency spectrum of the magnetic field signal before and after filtering.
3.1.2. DC Removal
The filtered magnetic field signal consists of the geomagnetic field, UAV interference magnetic field and the magnetic anomaly signal. In a small area, the geomagnetic field is approximately stable and spatially uniform in a short period of time [
30]. Here, the geomagnetic field is eliminated by removing the DC component.
The coordinate system o-xyz is established; x points to the east, y points to the north, and the z-axis is vertically upward, while the flying start point of the drone is used as the origin of the coordinate. The UAVMAG system flies a line in the north–south direction, flying speed of the drone is 2 m/s, and the sampling rate is 160 Hz. The raw magnetic field data is processed by a lowpass filter in
Section 3.1.1, as shown in
Figure 4a.
Figure 4 compares the magnetic field before and after removing the DC component, and the geomagnetic field is eliminated in
Figure 4b.
3.1.3. The Elimination of UAV Interference Field
The drone is not non-magnetic, partial components or structures are made of ferrous material, which will produce an interference magnetic field. The platform interference magnetic field is superimposed on the magnetic anomaly signal, deteriorating the quality of the magnetic data. The interference signals measured by two closely spaced sensors are correlated, and the interference signal is not correlated with the magnetic anomaly field; therefore, the magnetic anomaly field can be extracted from the total magnetic field based on the signal correlation model, and the details are described in Reference [
14], which is provided in
Supplementary Materials.
Figure 5a,b demonstrate the measured results of magnetometer 1 and magnetometer 2, low-pass filtering and DC removal have been executed, and the extracted magnetic anomaly field after removing the UAV interference field is shown in
Figure 5c.
Magnetometer 1 is closer to the drone than magnetometer 2, and the interference field measured by magnetometer 1 is larger, the root mean square (rms) errors of the two measured magnetic signals are 5.485 nT and 2.663 nT. The magnetic anomaly signal is separated from the measured results according to the method in
Supplementary Materials, the platform interference magnetic field is significantly reduced, rms is reduced to 1.077 nT.
3.2. The Inversion of Magnetic Field
For the ferromagnetic target in the shallow subsurface, when the distance between the sensor and the target is more than three times the maximum size of the target, the induced magnetic field generated by the target can be approximated as a point-shaped magnetic dipole. The dipole model is a point model, ignoring the shape and posture information of the target, and it can be characterized by six parameters including three-dimensional position vector and three-dimensional magnetic moment vector. The position vector provides the information about the location of the target, and the magnetic moment vector is related to the posture, shape, and material of the target.
A magnetic dipole is located at
, the magnetic moment is
, and the magnetic field
at the observation point
is:
is the permeability in the vacuum, and equals to H/m, is the distance vector from the observation point to the dipole , and is its modulus.
Assuming that there is no measurement noise, the output of the optically pumped magnetometer
is the superposition of the geomagnetic field and the projection of the induced magnetic field in the direction of the geomagnetic field [
31]:
is the geomagnetic field, is its magnitude.
Consequently, the magnetic anomaly field
is related to the magnetic moment and position of the dipole, written as:
The inversion problem is to invert the position
and magnetic moment
based on the magnetic anomaly signal (
,
i = 1, 2, …,
N) at multiple observation points (
,
i = 1, 2, …,
N), six unknown parameters form the feature vector
. The differential evolution (DE) algorithm is adopted to estimate
x, which is a classic heuristic random search algorithm [
32,
33]. DE is a global optimization strategy, suitable for solving noisy, multi-objective optimization problem.
The objective function is established by minimizing the data misfit between predicted magnetic anomaly field and observed magnetic anomaly field
. The predicted magnetic anomaly field
of the ferromagnetic target is based on Equation (3), so the objection function is expressed as follows:
The inversion flow of magnetic data is listed in Algorithm 1. The feature vector x inverted from the magnetic data provides the position and magnetic moment of the buried target.
Algorithm 1. The Inversion of Magnetic Field.
Input: Magnetic anomaly field ; The range of feature vector: , (j = 1,2,..,6)
Population: M; Dimension: D; Generation: T
Output: The location and magnetic moment vector of the target:
1 t1 (Initialization);
2 for i = 1 to M do
3 for j = 1 to D do
4 ;
5 end
6 end
7 while or do
8 for i = 1 to M do
9 for j = 1 to D do
10 ;
11 ;
12 end
13 if then
14 ;
15 if then
16 ;
17 end
18 else
19 ;
20 end
21 end
22 t t + 1;
23 end
24 return feature vector including location and magnetic moment |
3.3. EM Data Processing
TDEM-Cart system receives the secondary field generated by the target and converts it into the voltage signal through the induction coil. Its working principle is Faraday’s law of induction, and the working frequency band is very wide. The electromagnetic noise in the ambient environment is overlapped with the response of the target, the SNR of the secondary field will be reduced, degrading the detection performance. Therefore, some signal processing methods are utilized to eliminate the environmental noise and improve the SNR.
3.3.1. Signal Stacking
The emission current of the TDEM-Cart is a bipolar square wave, so the corresponding secondary field is also alternately positive and negative. Assuming that the received data has
n (
) periods, there are a total of 2
n positive and negative response signals. The negative polarity response is reversed and superimposed with the positive polarity response:
and
are the signals before and after stacking, and
is the stacking function, expressed as:
n denotes the number of the stacking period, T is the period of the emission current, is the Dirichlet function.
To understand the Equations (5) and (6), the Fourier functions of the two stacking functions with
n = 1 and
n = 8 are demonstrated in
Figure 6a. It shows that the stacking procedure eventually renders a narrow-band, match-filter-type band pass filter in time domain, and the larger the number of periods n, the narrower the bandwidth of the filter.
Figure 6b demonstrates the same result in time domain, three response signals with different stacking cycle
n = 0, 1, 8 are compared. As the number of superimposed cycles increases, the noise suppression is enhanced, especially in the late stage of the signal.
3.3.2. Windowing in Time Domain
In time domain, multiple time windows distributed at equal intervals are designed, and the integrated average value of the received signal in each time window is calculated to obtain the final response curve. The induced voltage after windowing procedure in time domain is obtained:
denotes the induced voltage signal after stacking,
denotes the voltage signal after windowing,
is the center of the window function,
is the rectangular window function, written as:
where
is the length of the rectangular window. Analyzed in frequency domain, the Fourier function of the rectangular window is equivalent to a low-pass filter, so the windowing process can eliminate out-of-band noise.
Figure 7 shows the comparison of received voltage signals before and after windowing, indicating that the late SNR of the response signal has been improved a lot through the time window processing.
3.4. The Inversion of EM Data
Similar to the inversion of magnetic field data, the secondary field generated by the target is approximated by a three-dimensional magnetic dipole for the long-distance detection system. The difference is, the magnetic moment of the dipole is a constant in the inversion of magnetic data, while the magnetic moment of the dipole in EM detection is a time-dependent parameter, because the primary field is time-varying.
According to the theory proposed by L. R. Pasion [
23,
34], the magnetic moment
has the form:
where
A is the Euler rotation tensor, determined by the azimuth
and dip
that are the rotation angle and the inclination angle between the local coordinate system where the target is located and the global coordinate system.
is the primary field at the location of the target,
is the electromagnetic polarization tensor, characterized by three diagonal elements
,
(
i = 1,2,3) denotes the intrinsic response of the 3D magnetic dipole along the
i-th direction, and
is estimated as [
34]:
where
is the magnitude of the polarization,
defines the power law decay,
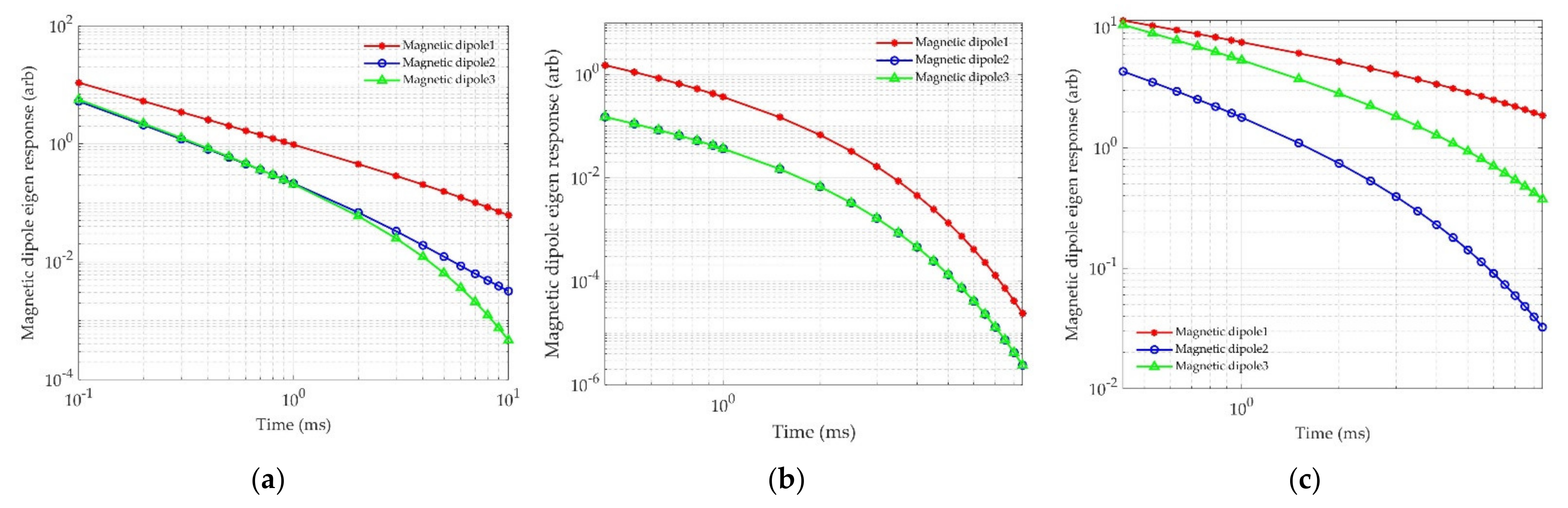
is the fundamental time constant. Once the three parameters
are determined, the intrinsic response curve of the magnetic dipole versus time can be estimated.
Combined (9) and (10), the function
() is a unified representation for Equations (9) and (10), so the magnetic moment of dipole is described as:
Based on the hypothesis of magnetic dipole, the EM feature vector
y contains 14 unknown parameters, including 3 position parameters related to the location of target, 2 angle parameters related to posture of target and 9 parameters related to shape characteristics of target:
The objective function of the electromagnetic inversion is established to minimize the misfit between the received voltage signal
and the predicted the dipole response
. The function
() in (13) is a unified representation for calculating the magnetic field generated by a dipole in Equation (1), the objective function of EM inversion is derived as follows:
Levenberg–Marquardt (LM) algorithm is adopted to invert the feature vector
y, which is a trust region method for solving the nonlinear problem [
35]. LM is a local optimization strategy with the advantage of fast convergence.
Figure 8 is the flow chart of the joint inversion. It is worth emphasizing that the inversion results of the magnetic field is set as the initial value of the EM inversion, providing a priori information about the target location. The joint inversion method belongs to the “feature level” sensor fusion [
27], the inversion result of the joint magnetic field and electromagnetic data is a fused feature vector, containing a three-dimensional position and two attitude angles of the target, and the shape feature of the target can be inferred from the intrinsic response curve of the magnetic dipole, realizing the classification of the target.
5. Discussion
This paper introduces the joint remote detection system, which combines the UAV magnetic survey (UAVMAG) and the vehicle-mounted time domain electromagnetic system (TDEM-Cart), and the cooperative processing flow is designed, fusing the feature vectors inverted from magnetic data and electromagnetic data. Compared with the single detection technology [
4,
5,
6,
7,
8,
9], existing airborne and ground-based joint detection modes [
24,
25,
26], the combination method proposed in this paper has significant advantages in terms of positioning accuracy and detection efficiency.
Compared with the individual magnetic detection, the joint detection system is capable of detecting both ferromagnetic and non-ferromagnetic metal targets, overcoming the shortcomings that only ferrous targets can be detected by the magnetic survey. In the first experiment, the joint detection system worked in full-coverage survey mode, and the experimental results confirm that the joint detection system is able to detect the target made of aluminum.
Compared with the single electromagnetic method, the joint detection system can improve the detection efficiency. When the joint detection system works in the cued survey mode, the rapid and complete scanning detection is firstly conducted by the UAVMAG, and potential abnormal regions are delineated according to the result of magnetic survey. Then, local fine surveys in the vicinity of the targets are performed by TDEM-Cart system, avoiding covering the entire test area and greatly shortening the working time.
For the cooperative interpretation, the inversion of magnetic data is based on the global optimization algorithm DE, the inversion of EM data fuses the feature vector inverted from magnetic data and adopts the local optimization algorithm LM. The proposed joint inversion process can not only improve the positioning result of the target, but also avoid falling into the local optimal solution. In the second experiment, the maximum positioning error of the magnetic field inversion reaches 34 cm, and the target positioning deviation after the joint inversion is less than 10 cm. In addition, the posture and shape characteristics of the target are inferred based on the two attitude angles and dipole intrinsic response over time, which are basically in line with the characteristics of the actual buried targets. The experimental results indicate that the accuracy of cooperative interpretation is higher, which is of great significance to the classification and recognition of targets. Nonetheless, it should be noted that the proposed joint processing algorithm is only suitable for the inversion of an isolated target.
Compared with the joint detection system in [
23] with the combination of handheld magnetic survey and ground-based TDEM, the combined detection method proposed in this paper has higher detection efficiency than the ground magnetic survey, which is more suitable for large-scale survey and rapid monitoring. In [
18], the UAV-mounted TDEM system has been developed, and the field experiments were carried out to detect UXO. The combination of the UAV-borne magnetic detection system and the UAV-borne electromagnetic system is bound to have better performance, which is the focus of future research.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}