
An Efficient Decision Support System for Flood Inundation Management Using Intermittent Remote-Sensing Data



Abstract
:1. Introduction
2. Methodology
2.1. Multi-Scale Flood-Information-Extraction Model
2.1.1. Model Design
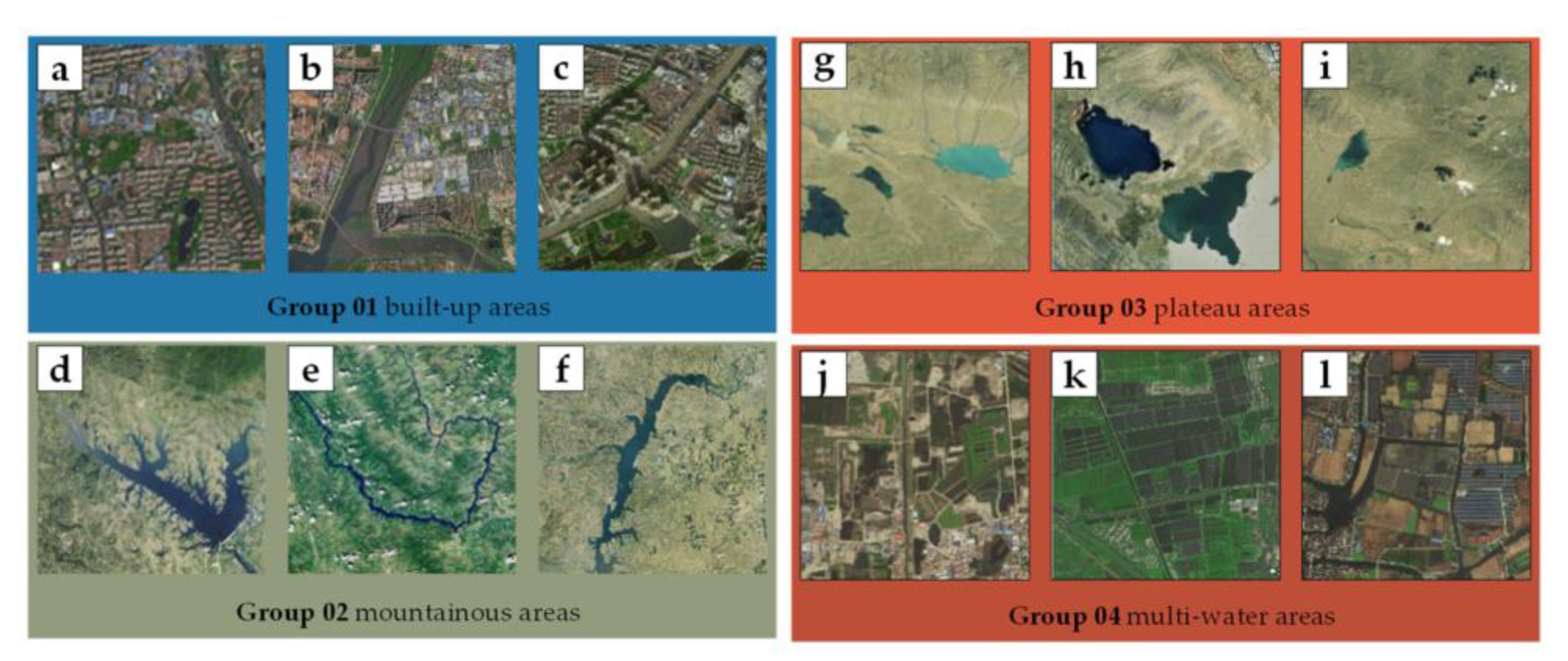
2.1.2. Sample Generation
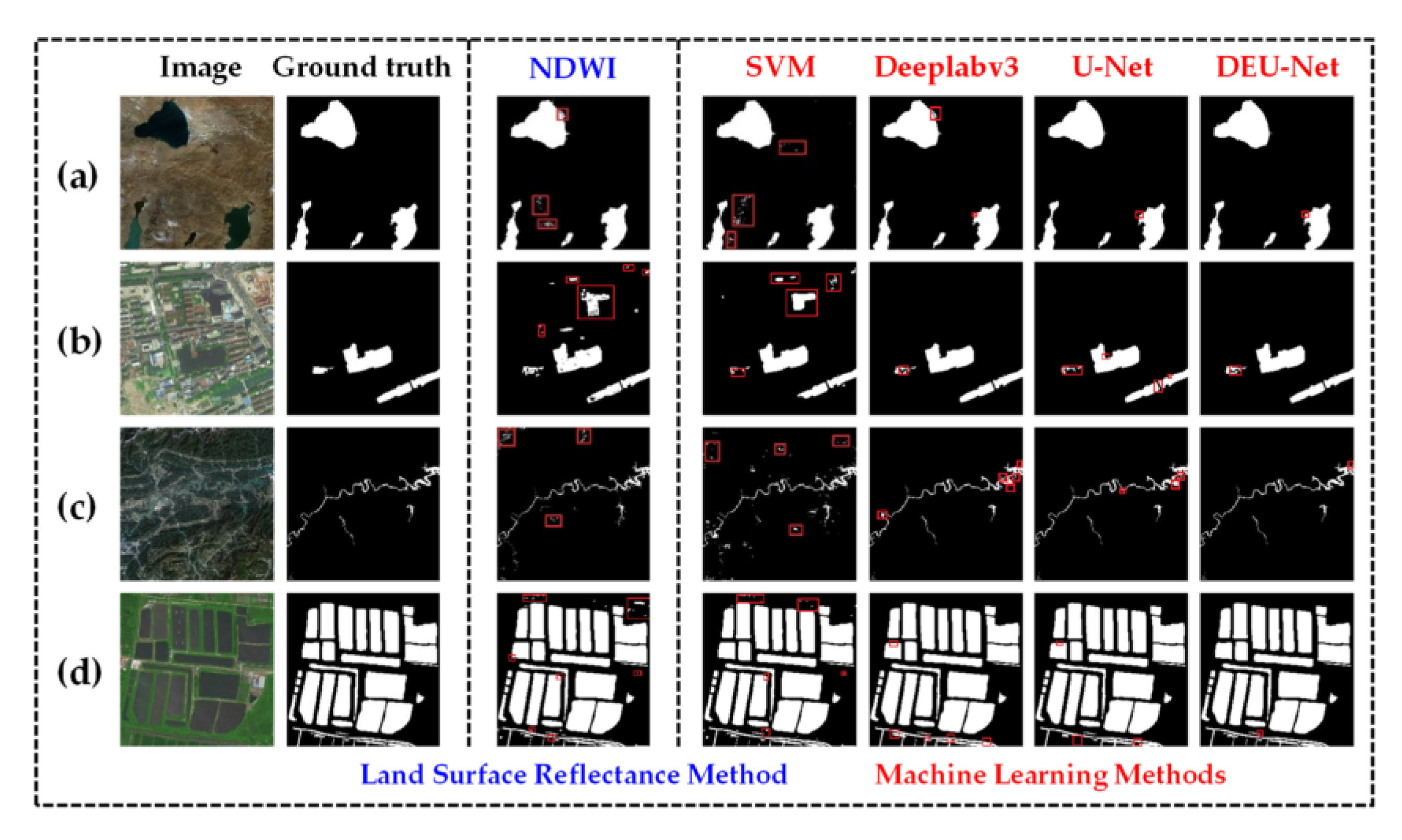
- Built-up areas: the shapes of water bodies in built-up areas are relatively regular, mainly natural or artificial rivers and lakes. However, the surface features are somewhat complex, and there are several confusing features, such as building shadows, roads, dark lawns, and dark roofs [17].
- Mountainous areas: The water bodies in mountainous areas are primarily rivers. Mountain rivers have many branches, and it is hard to accurately extract the edges for the most part. Moreover, they are easily confused with mountain shadows.
- Plateau areas: The chief water bodies in the plateau areas are plateau lakes and plateau rivers. Because of their rich mineral ions, the colors of the water bodies are different from the common ones, such as turquoise and light blue. Confusing features are mountain shadows and cloud shadows left in the image due to the shooting angle.
- Multi-water areas: These areas contain rich water resources, mainly in farming regions such as paddy fields and fish ponds. The water bodies in this area are compactly distributed with many types and different scales. They may include lakes, rivers, and ponds, as well as small puddles. Ground objects that are easy to confuse include farmland and masking nets. In the low resolution of remote-sensing images, water bodies may be indistinguishable from dark farmland.
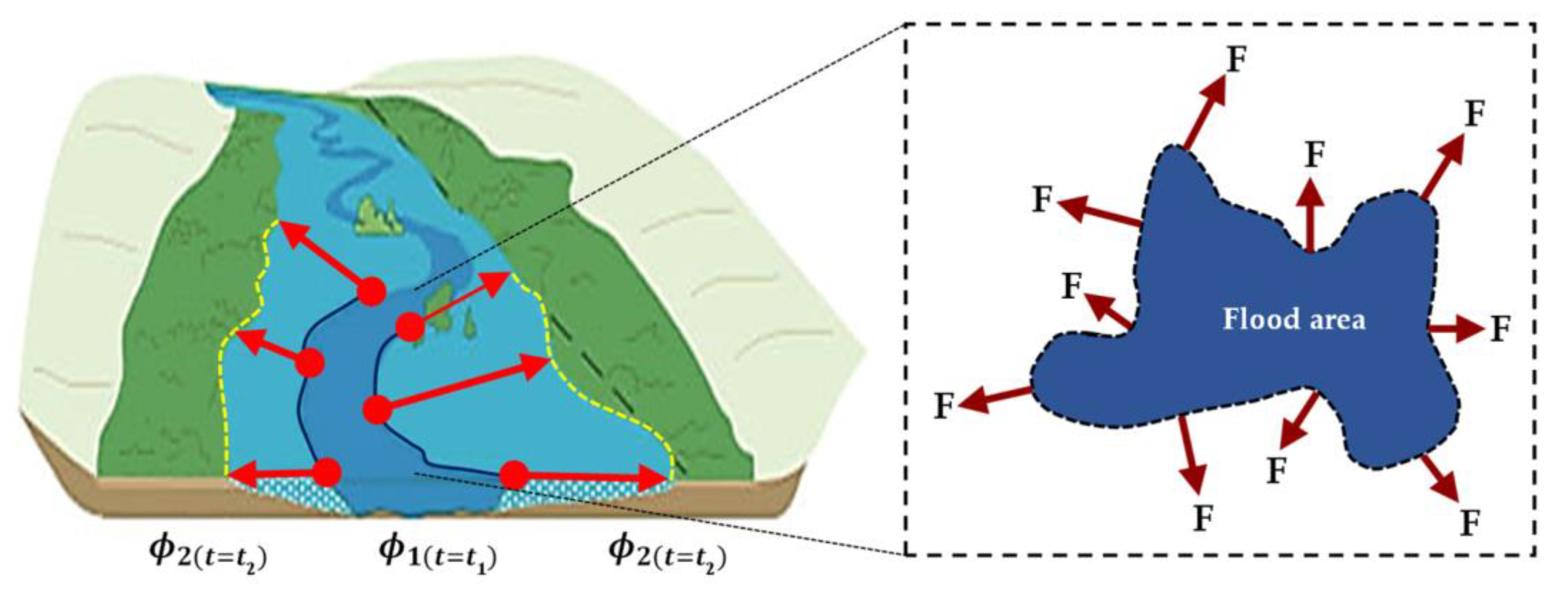
2.2. Water Boundary Tracking Model
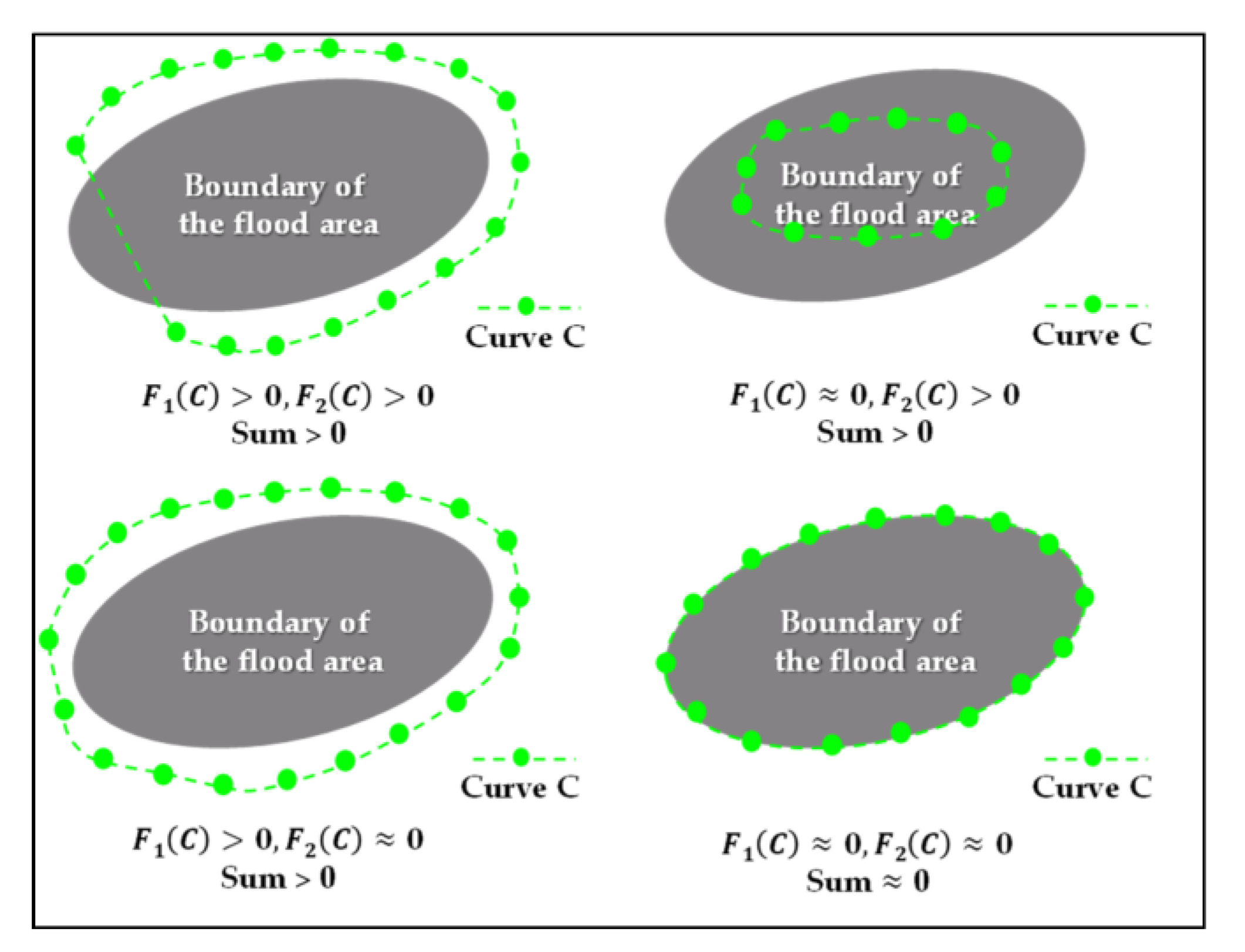
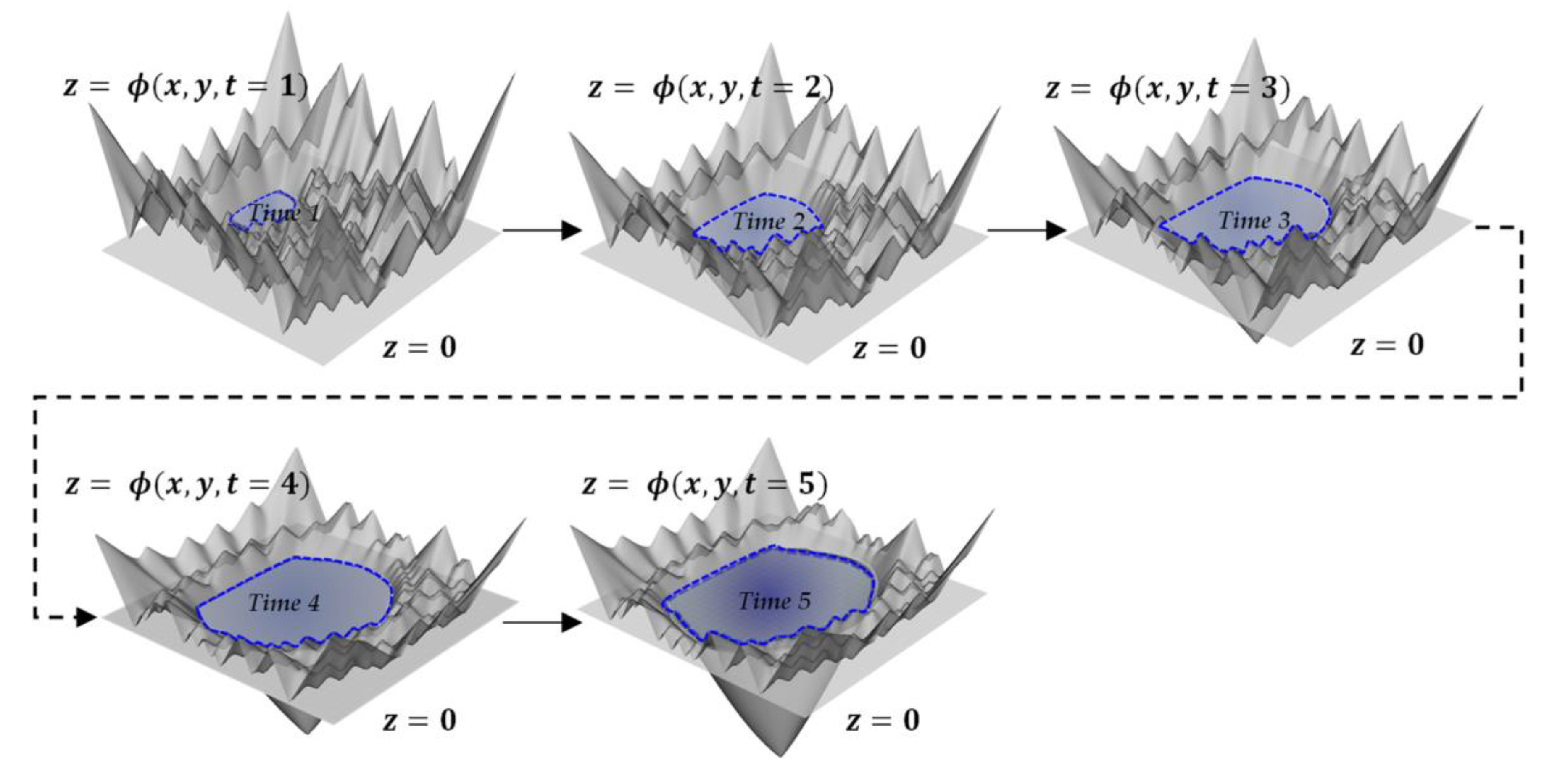
2.2.1. Curve Evolution
2.2.2. Mathematical Derivation of the Model
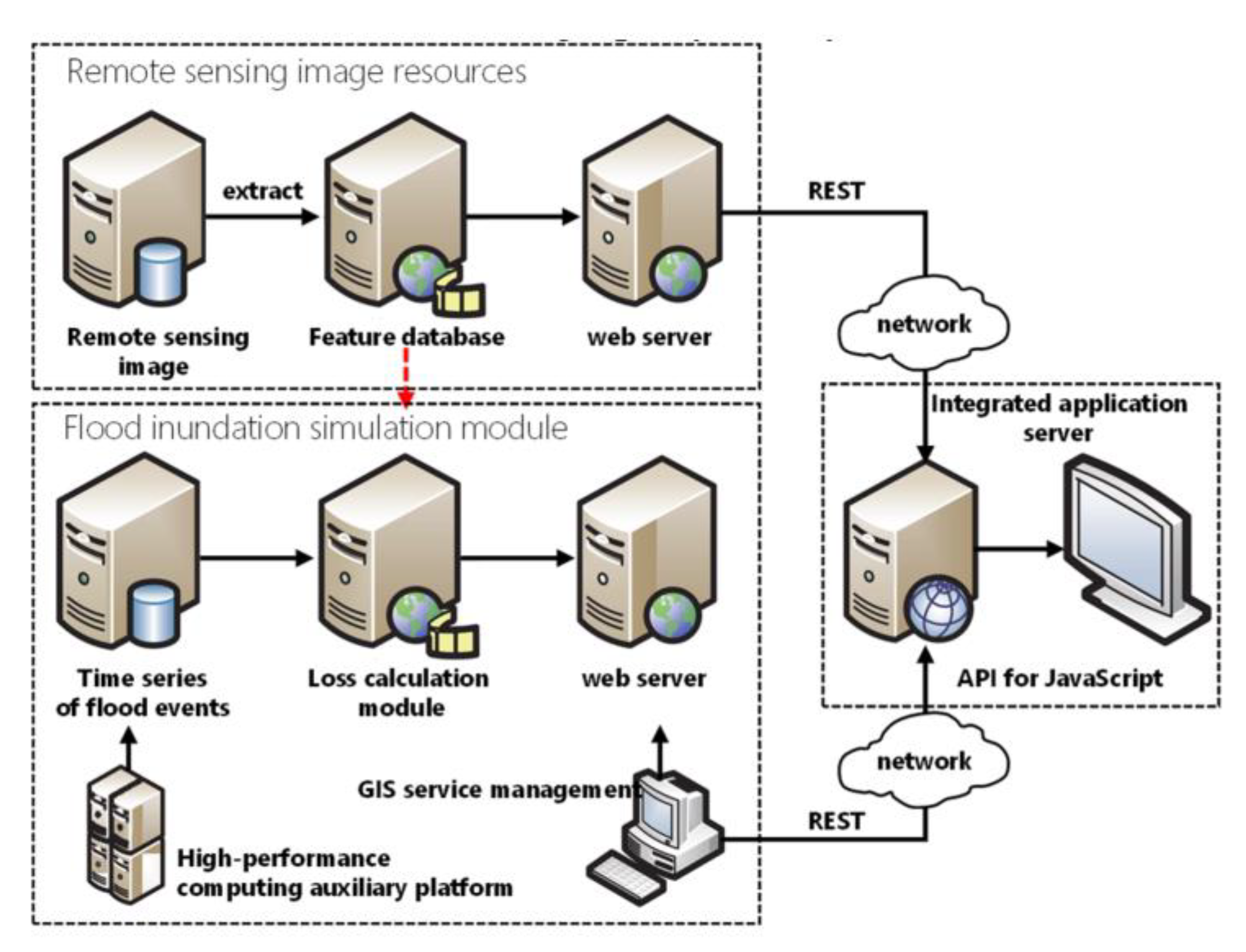
2.3. Decision Support System for Integrated Flood-Loss Assessment
3. Model Performance Testing and Discussion
3.1. Performance Comparison of the Water Extraction Model Technologies
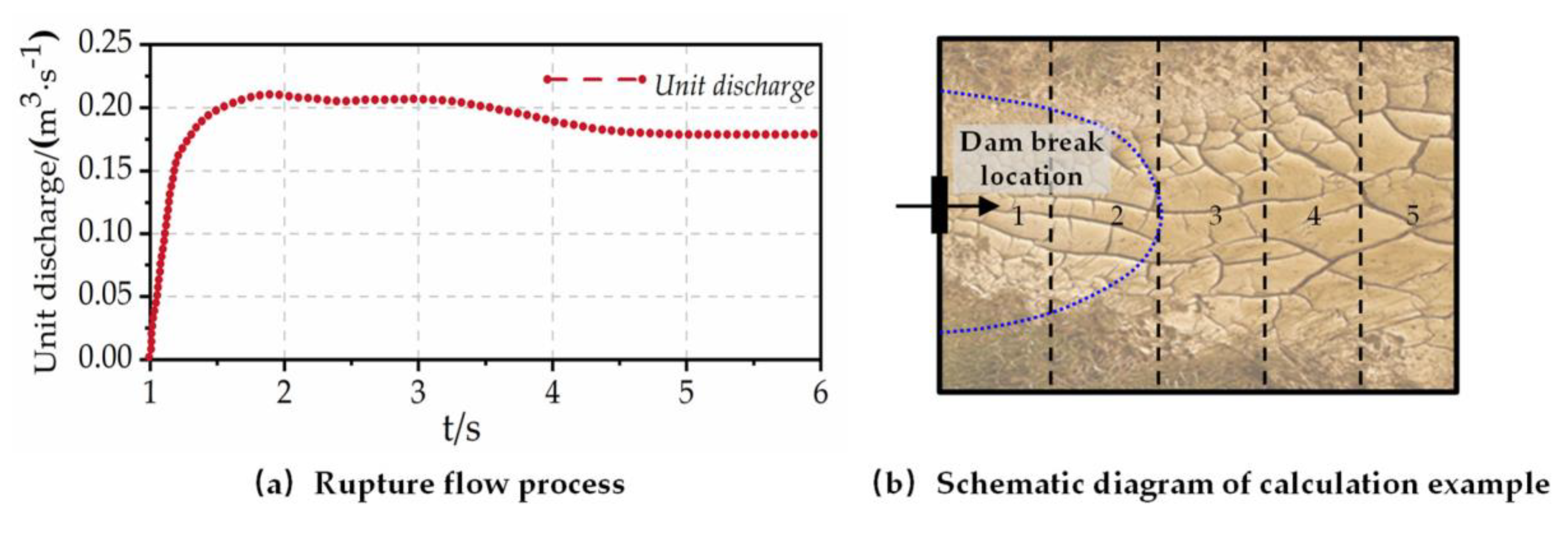
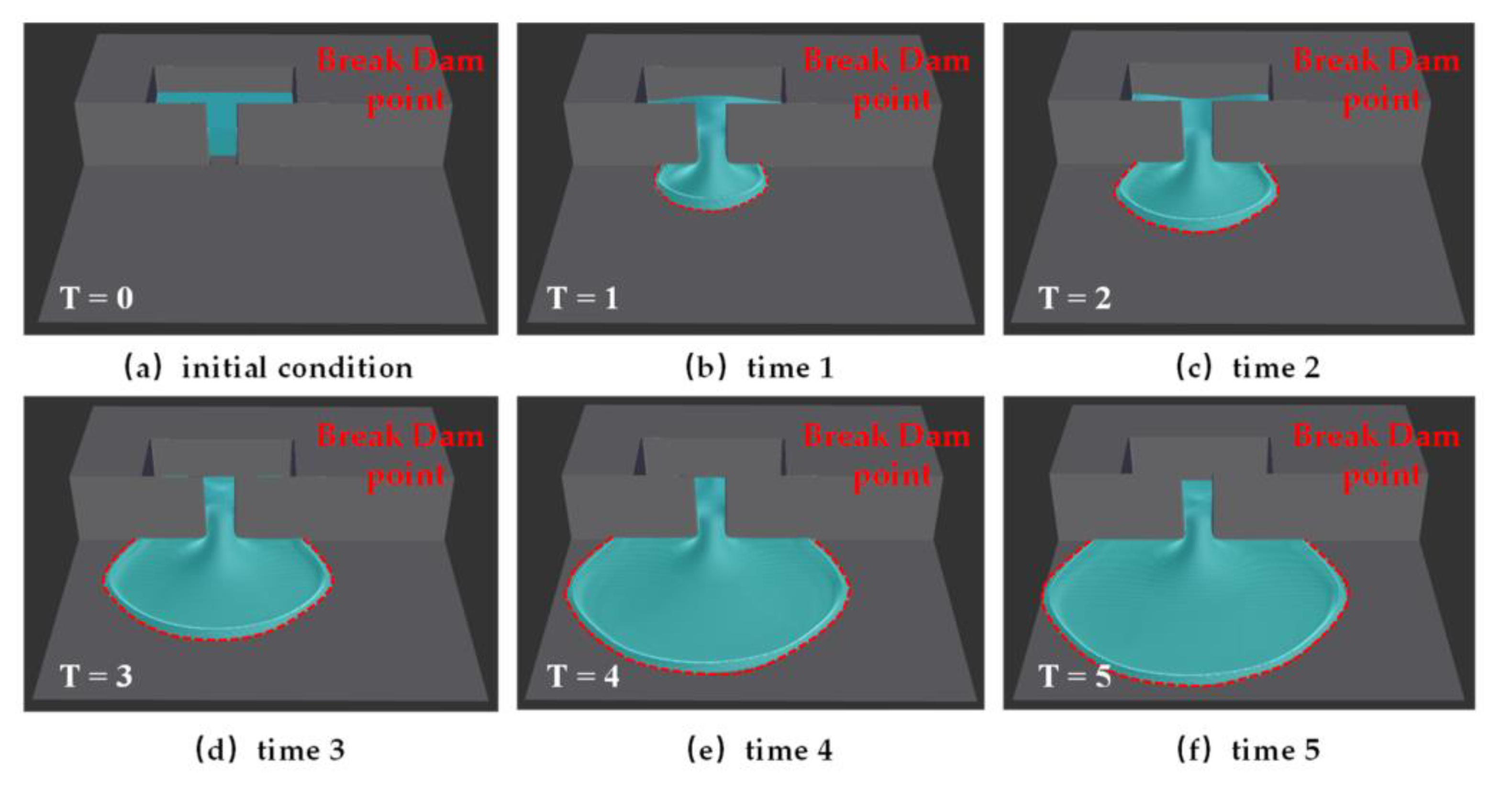
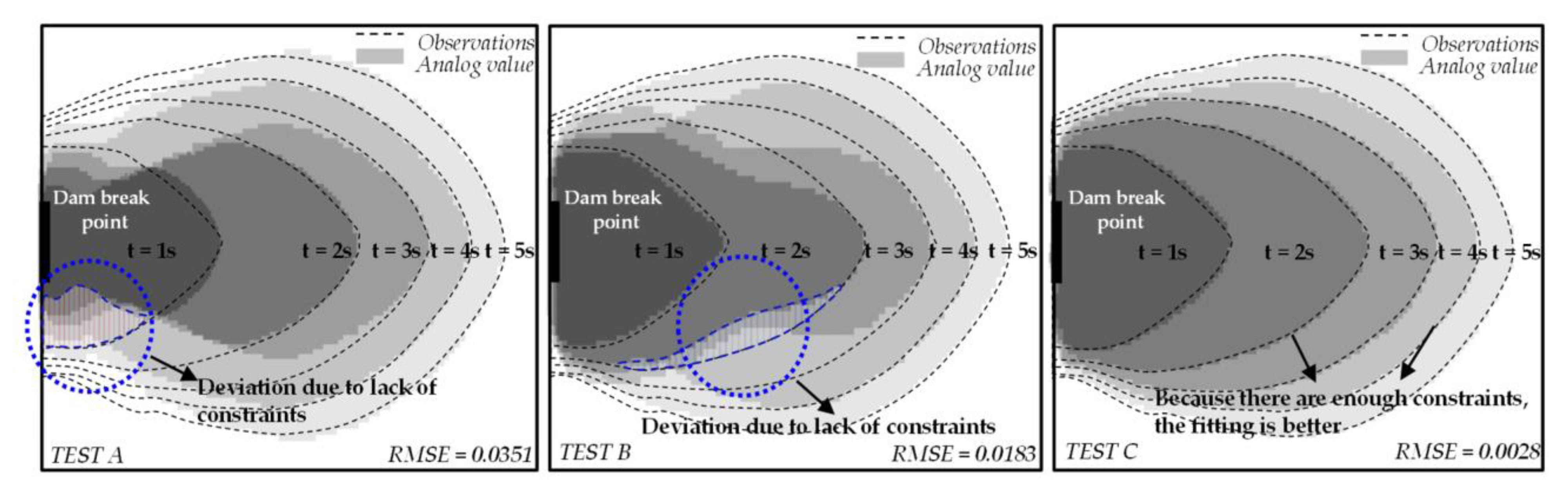
3.2. Laboratory-Scale Experiment of Dike Flood Boundary Simulation
4. Case Study
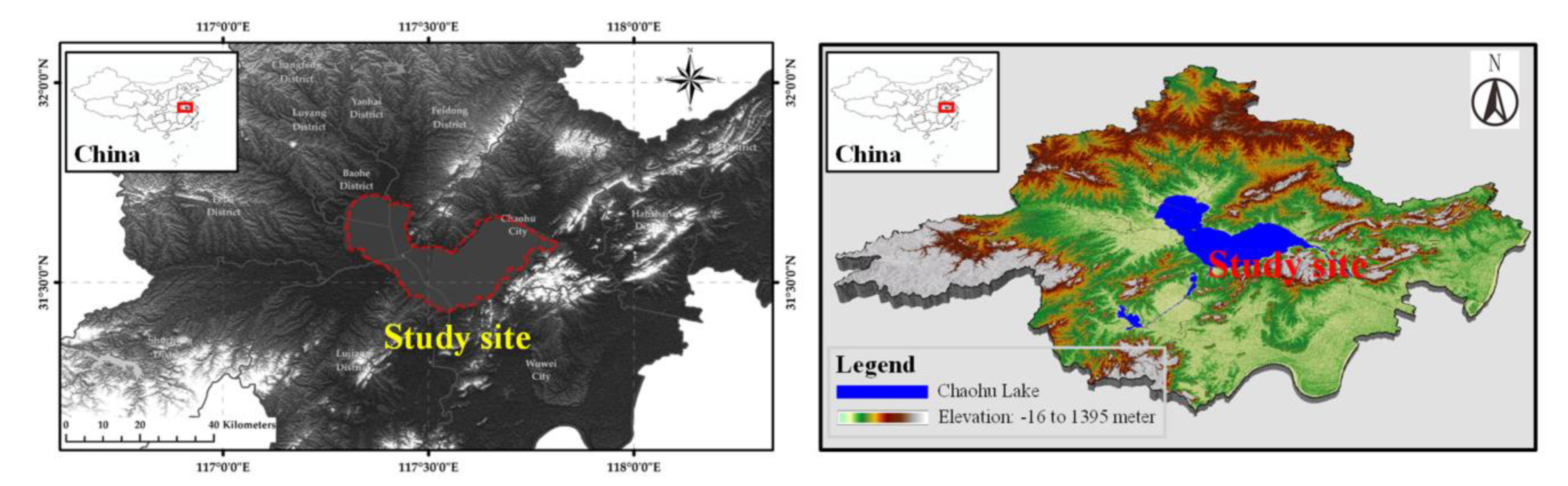
4.1. Study Site
4.2. Data Collection and Preprocessing
4.3. Results and Discussion
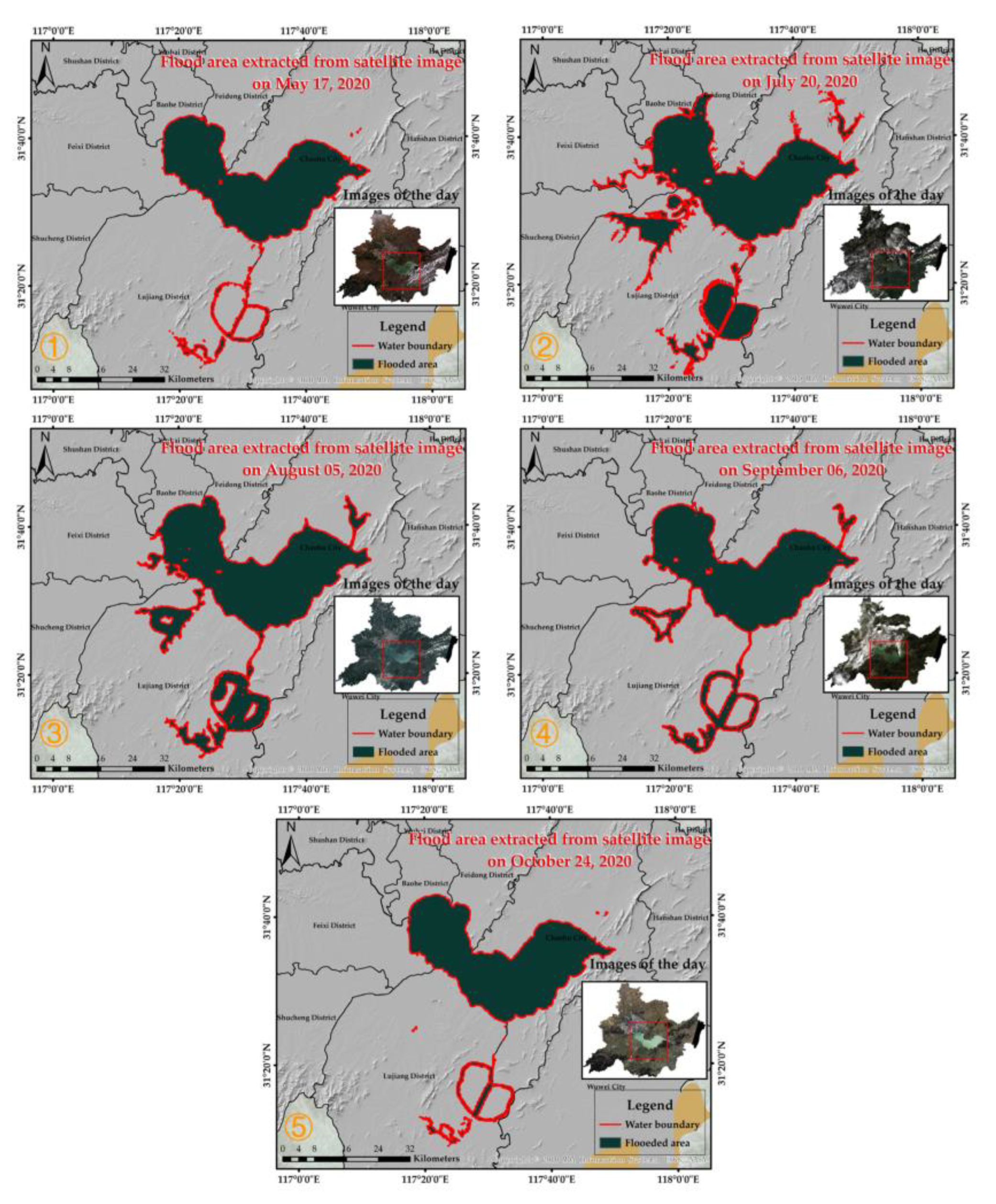
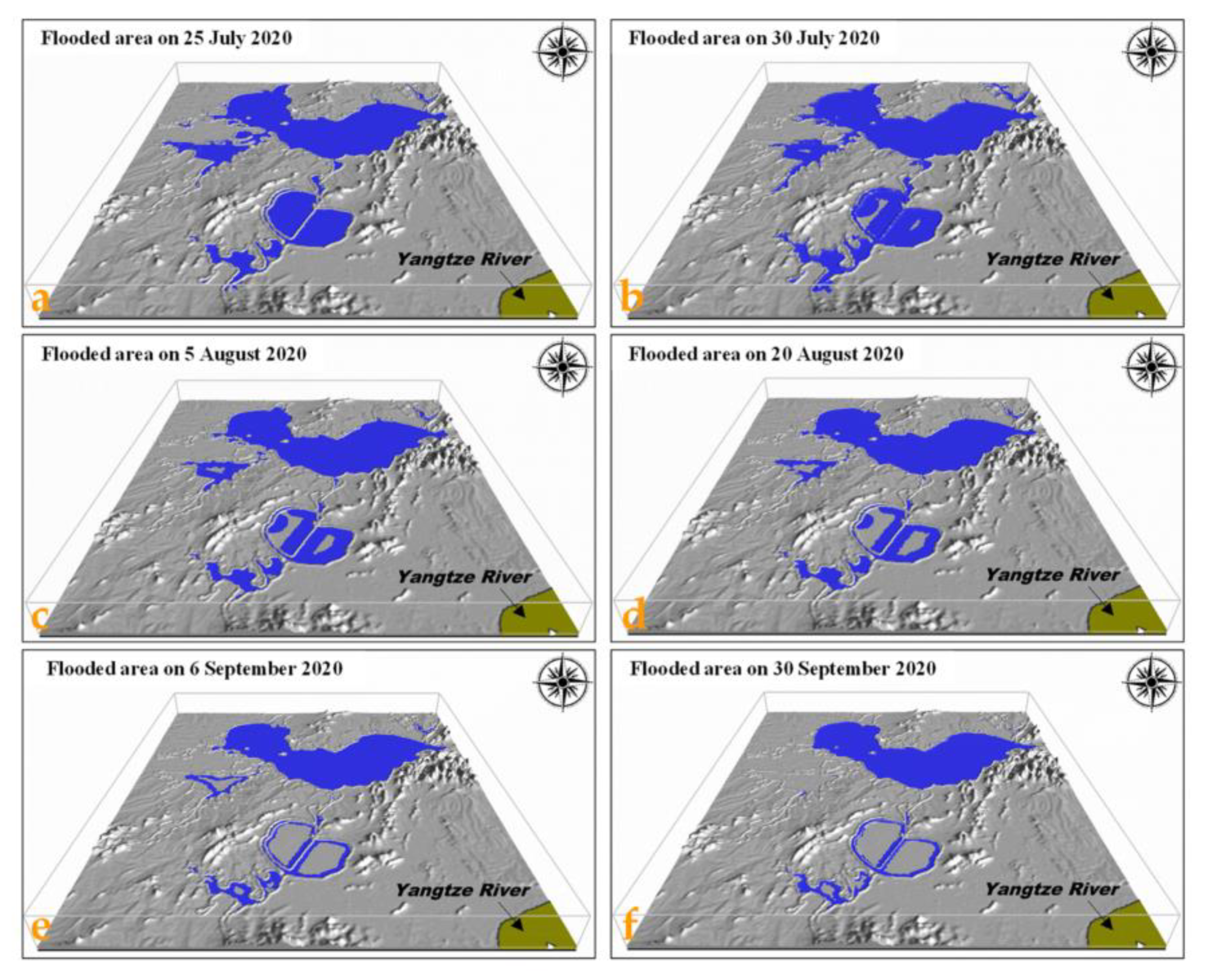
4.3.1. Flood Extraction Results on the Study Site
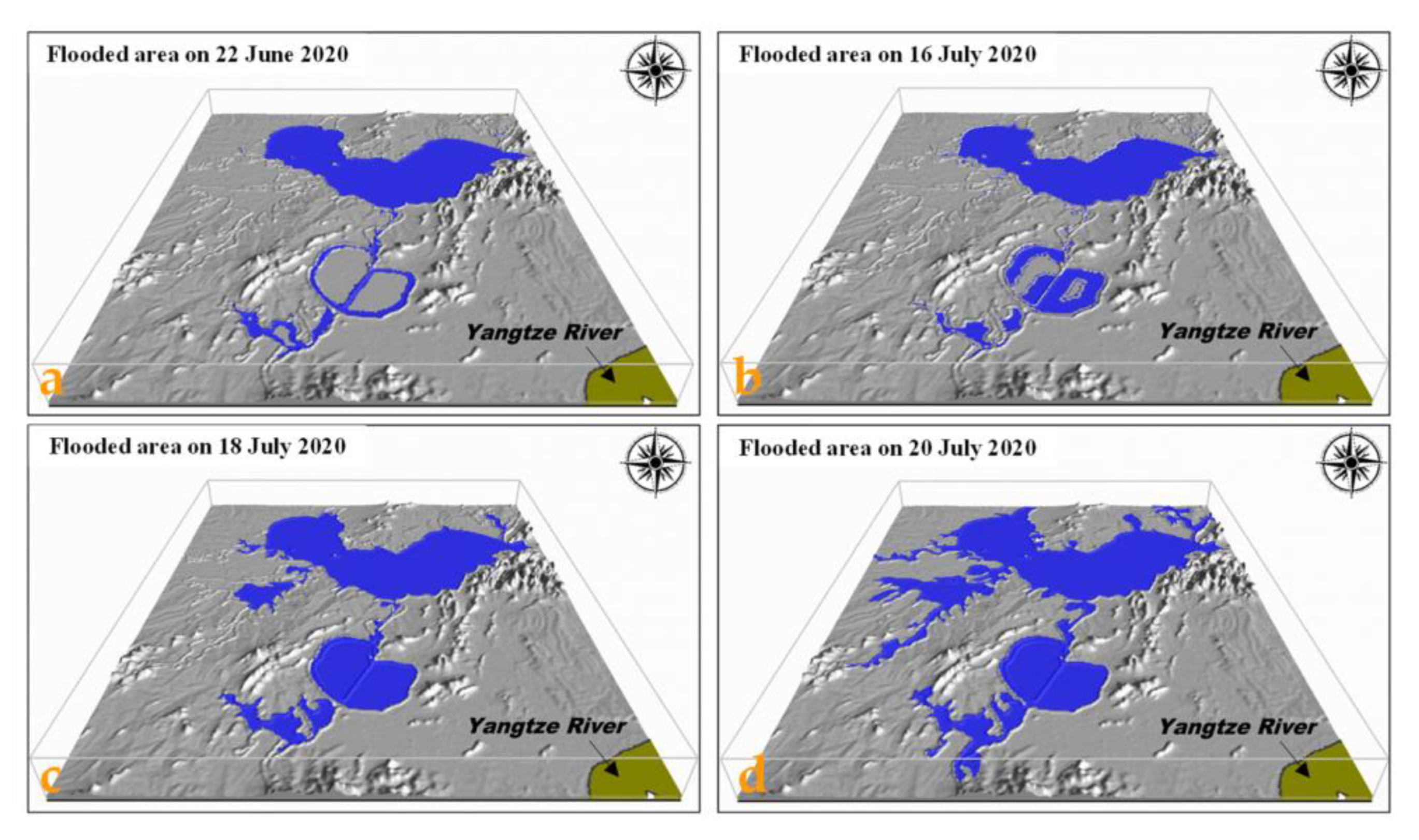
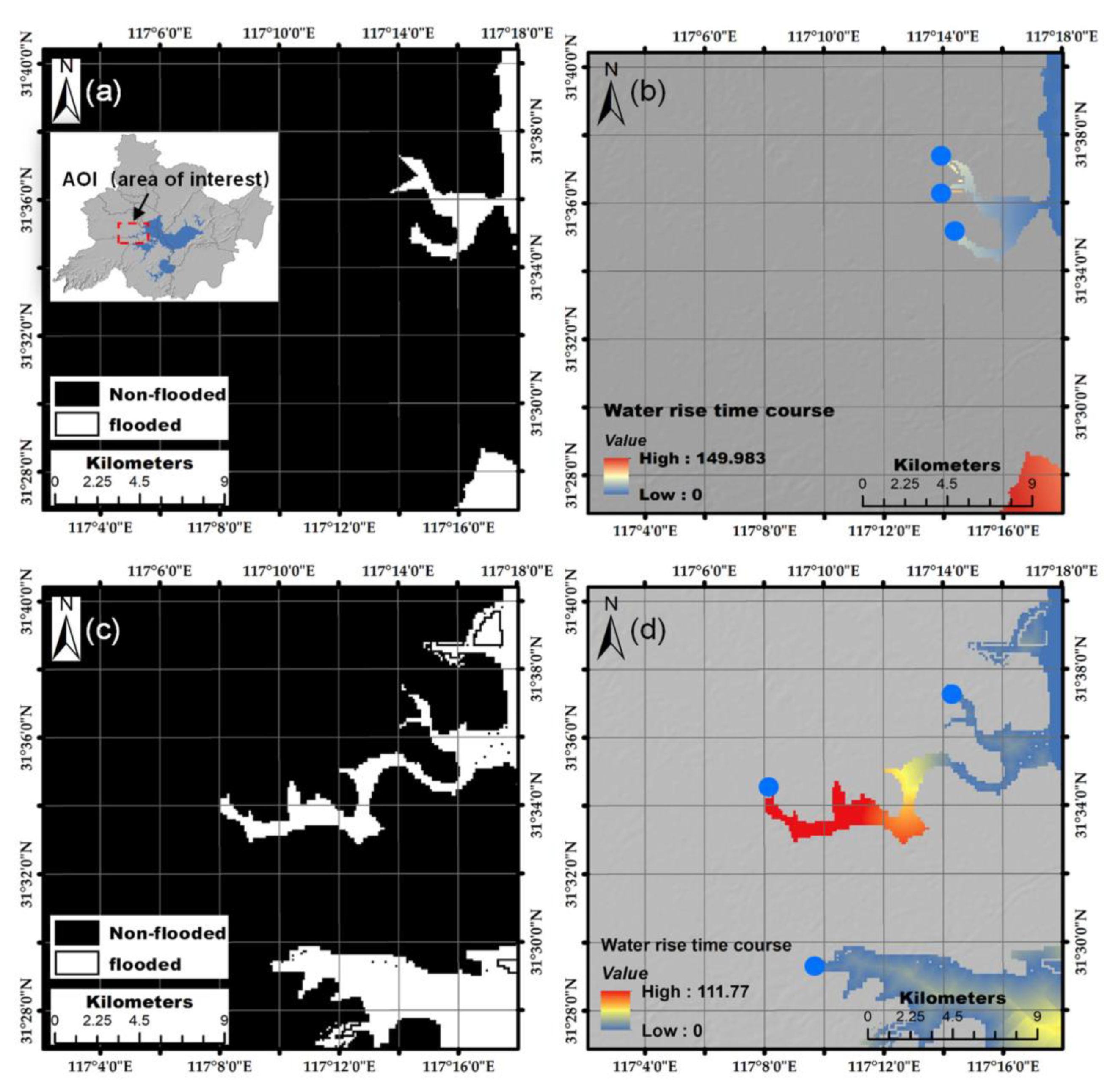
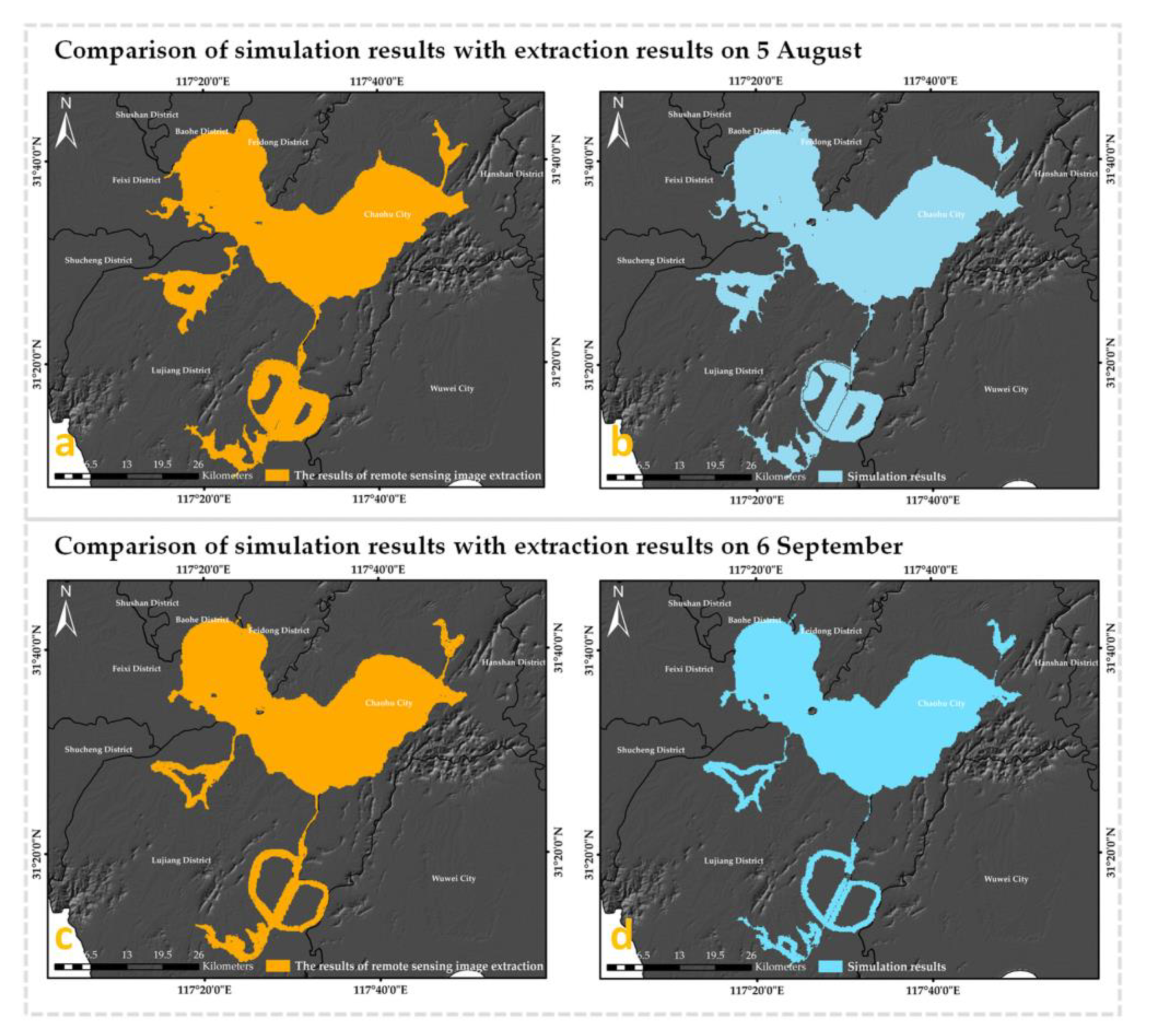
4.3.2. Overland Flow Routing Simulation Result
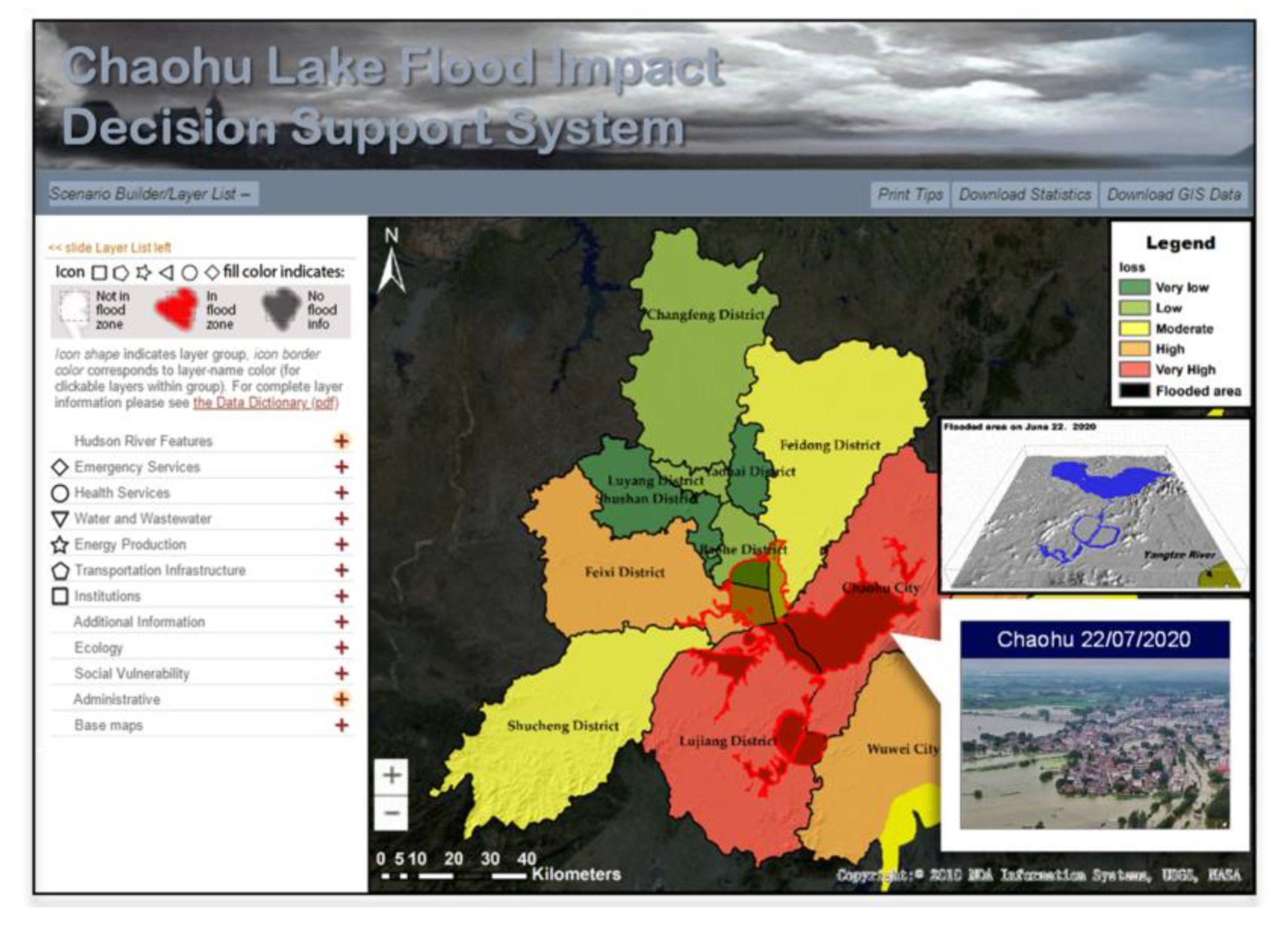
4.3.3. Prediction of Potential Flooding Risk
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Steps | Output |
|---|---|---|
, , ) 2. The number of cloud drops | ① Create a normal random number with as the expected value and as the variance. | |
| ② Create a normal random number with as the expected value and as the variance. | ||
| ③ Calculate the certainty degree | ||
| ④ Generate a cloud drop with and . | ||
| ⑤ Repeat steps 1~4 until the number of cloud drops reaches | ||
4. The number of indicators | ⑥ Calculate the proportion of each indicator (i and j represent the serial number of the objects and indicators, respectively) | |
| ⑦ Calculate the entropy value of each indicator | ||
| ⑧ Obtain the weight of each indicator |
References
- Shao, M.; Gong, Z.; Xu, X. Risk assessment of rainstorm and flood disasters in China between 2004 and 2009 based on gray fixed weight cluster analysis. Nat. Hazards. 2014, 71, 1025–1052. [Google Scholar] [CrossRef]
- Nobre, G.G.E.; Jongman, B.; Aerts, J.; Ward, P.J. The role of climate variability in extreme floods in Europe. Environ. Res. Lett. 2017, 12, 84012. [Google Scholar] [CrossRef]
- Schumann, G.; Baldassarre, G.D.; Bates, P.D. The Utility of Spaceborne Radar to Render Flood Inundation Maps Based on Multialgorithm Ensembles. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2801–2807. [Google Scholar] [CrossRef]
- Zhang, Y.; Crawford, P. Automated Extraction of Visible Floodwater in Dense Urban Areas from RGB Aerial Photos. Remote Sens. Basel. 2020, 12, 2198. [Google Scholar] [CrossRef]
- Hong, S.; Jang, H.; Kim, N.; Sohn, H.G. Water Area Extraction Using RADARSAT SAR Imagery Combined with Landsat Imagery and Terrain Information. Sensors 2015, 15, 6652–6657. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, X.Y.; Gao, C.; Ren, X.; Xie, J. Research on the Method of Extracting Water Information in Dongping Lake by Using Landsat TM Image. Geomat. Spat. Inf. Technol. 2012, 35, 23–27. [Google Scholar]
- McFEETERS, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Scott, W.C.; Owen, K.; Miles, E.S.; Quincey, D.J. Optimising NDWI supraglacial pond classification on Himalayan debris-covered glaciers. Remote Sens. Environ. 2018, 217, 414–425. [Google Scholar]
- Kelly, J.T.; Gontz, A.M. Using GPS-surveyed intertidal zones to determine the validity of shorelines automatically mapped by Landsat water indices. Int. J. Appl. Earth Obs. 2018, 65, 92–104. [Google Scholar] [CrossRef]
- Worden, J.; Beurs, K.M.D. Surface water detection in the Caucasus. Int. J. Appl. Earth Obs. 2020, 91, 102159. [Google Scholar] [CrossRef]
- Acharya, T.D.; Lee, D.H.; Yang, I.T.; Lee, J.K. Identification of Water Bodies in a Landsat 8 OLI Image Using a J48 Decision Tree. Sensors 2016, 16, 1075. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fu, J.; Wang, J.; Li, J. Study on the Automatic Extraction of Water Body from TM Image Using Decision Tree Algorithm. Available online: https://ui.adsabs.harvard.edu/abs/2008SPIE.6625E..02F/abstract (accessed on 9 September 2007).
- Yong, H.D.; Jing, L.I.; Chen, Y.H.; Jiang, W.G. Water and Settlement Area Extraction from Single-band, Single-polarization SAR Images Based on SVM Method. J. Image Graph. 2008, 13, 257–263. [Google Scholar]
- Sarp, G.; Ozcelik, M. Water body extraction and change detection using time series: A case study of Lake Burdur, Turkey. J. Taibah Univ. Sci. 2016, 11, 381–391. [Google Scholar] [CrossRef] [Green Version]
- Byoung, K.; Hyeong, K.; Jae, N. Classification of Potential Water Bodies Using Landsat 8 OLI and a Combination of Two Boosted Random Forest Classifiers. Sensors 2015, 15, 13763–13777. [Google Scholar]
- Paul, A.; Tripathi, D.; Dutta, D. Application and comparison of advanced supervised classifiers in extraction of water bodies from remote sensing images. Sustain. Water Resour. Manag. 2018, 4, 905–919. [Google Scholar] [CrossRef]
- Guo, H.; He, G.; Jiang, W.; Yin, R.; Leng, W. A Multi-Scale Water Extraction Convolutional Neural Network (MWEN) Method for GaoFen-1 Remote Sensing Images. Int. J. Geo-Inf. 2020, 9, 189. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Gao, Y.; Li, L.; Xue, J.; Li, Y. Semantic segmentation of high-resolution remote sensing images using fully convolutional network with adaptive threshold. Connect. Sci. 2019, 31, 169–184. [Google Scholar] [CrossRef]
- Feng, W.; Sui, H.; Huang, W.; Xu, C.; An, K. Water Body Extraction From Very High-Resolution Remote Sensing Imagery Using Deep U-Net and a Superpixel-Based Conditional Random Field Model. IEEE Geosci. Remote S 2018, 1–5. [Google Scholar] [CrossRef]
- Yang, Z.; Wen-Hao, O.U.; Liu, X.Y.; Chuang, L.I.; Fei, X.Z.; Zhao, B.B.; Liu, L.; Xiao, M.A. Water information extraction for high resolution remote sensing image based on LinkNet convolutional neural network. J. Yunnan Univ. Nat. Sci. Ed. 2019, 41, 932–938. [Google Scholar]
- Li, Z.; Wang, R.; Zhang, W.; Hu, F.; Meng, L. Multiscale Features Supported DeepLabV3+ Optimization Scheme for Accurate Water Semantic Segmentation. IEEE Access. 2019, 7, 1. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Liang, Q.; Du, G.; Hall, J.W.; Borthwick, A.G. Flood Inundation Modeling with an Adaptive Quadtree Grid Shallow Water Equation Solver. J. Hydraul. Eng. 2015, 134, 1603–1610. [Google Scholar] [CrossRef]
- Teng, J.; Jakeman, A.J.; Vaze, J.; Croke, B.; Dutta, D.; Kim, S. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environ. Modell. Softw. 2017, 90, 201–216. [Google Scholar] [CrossRef]
- Mason, D.C.; Bates, P.D.; Amico, J. Calibration of uncertain flood inundation models using remotely sensed water levels. J. Hydrol. 2009, 368, 224–236. [Google Scholar] [CrossRef]
- Lai, X.J.; Jiang, J.H.; Huang, Q.; Wu, D. A Level-set Based Varistional Method for Data Assimilation of Flood Extend into a Two-dimensional Flood Model. J. Basic Sci. Eng. 2013, 5, 1018–1026. [Google Scholar]
- Zhang, L.C.; Li, G.Q.; Yu, W.Y.; Ran, Q. Approach to simulating the spatial-temporal process of flood inundation area. Remote Sens. Land Resour. 2017, 29, 92–96. [Google Scholar]
- Shamsolmoali, P.; Zareapoor, M.; Wang, R.; Zhou, H.; Yang, J. A Novel Deep Structure U-Net for Sea-Land Segmentation in Remote Sensing Images. IEEE J. Stars. 2019, PP, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Deng, M.; Lee, J.; Sinha, A.; Barbastathis, G. Imaging through glass diffusers using densely connected convolutional networks. Optica 2017, 5, 7. [Google Scholar] [CrossRef]
- Tao, Y.; Xu, M.; Lu, Z.; Zhong, Y. DenseNet-Based Depth-Width Double Reinforced Deep Learning Neural Network for High-Resolution Remote Sensing Image Per-Pixel Classification. Remote Sens. Basel. 2018, 10, 779. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Gao, X.; Zhang, Y.; Zhao, G. MSLWENet: A Novel Deep Learning Network for Lake Water Body Extraction of Google Remote Sensing Images. Remote Sens. Basel. 2020, 12, 4140. [Google Scholar] [CrossRef]
- Sun, H.; Wang, J.; Ye, W. A Data Augmentation-Based Evaluation System for Regional Direct Economic Losses of Storm Surge Disasters. Int. J. Env. Res. Pub. He. 2021, 18, 2918. [Google Scholar] [CrossRef]
- Zheng, Y.; Sun, H. An Integrated Approach for the Simulation Modeling and Risk Assessment of Coastal Flooding. Water 2020, 12, 2076. [Google Scholar] [CrossRef]
- Li, D.Y.; Meng, H.J.; Shi, X.M. Membership Clouds and Membership Cloud Generators. Comput. R D 1995, 32, 15–20. [Google Scholar]
- Ji, Y.; Huang, G.H.; Sun, W. Risk assessment of hydropower stations through an integrated fuzzy entropy-weight multiple criteria decision making method: A case study of the Xiangxi River. Expert Syst. Appl. 2015, 42, 5380–5389. [Google Scholar] [CrossRef]
- Tong, X.Y.; Xia, G.S.; Lu, Q.; Shen, H.; Zhang, L. Land-Cover Classification with High-Resolution Remote Sensing Images Using Transferable Deep Models. arXiv 2019, arXiv:1807.05713. [Google Scholar] [CrossRef] [Green Version]
- Xia, G.S.; Hu, J.; Hu, F.; Shi, B.; Zhang, L. AID: A Benchmark Data Set for Performance Evaluation of Aerial Scene Classification. IEEE T. Geosci. Remote. 2017, 55, 3965–3981. [Google Scholar] [CrossRef] [Green Version]
- Anhui Broadcasting Corporation. Available online: http://www.ahtv.cn/pindao/ahjs/dysj/split/2020/0819/001436190.html (accessed on 19 August 2020).
- Anhui Broadcasting Corporation. Available online: http://www.ahtv.cn/pindao/ahgg/yx60/split/2020/0921/001446560.html (accessed on 22 September 2020).
- Lujiang County Government Official Website. Available online: http://www.lj.gov.cn/zwdt/xzdt/119897595.html (accessed on 29 September 2020).
- Anhui Provincial Bureau of Statistics. Available online: http://tjj.ah.gov.cn/public/6981/145230531.html (accessed on 20 October 2020).
- Shen, Q.; Gao, W.; Li, X.; Zhou, Y.T.; Zhou, Y.H. Monitoring of Flood Depth in Small and Medium-sized Basins Using GF-1 WFV Images. Remote Sens. Inf. 2019, 34, 87–92. [Google Scholar]





















| Evaluation Index | Definition | Formula |
|---|---|---|
| OA | The ratio to quantify the degree of match between the predicted value and the actual value | |
| FWR | The ratio of the number of pixels misclassified as water and the number of predicted water pixels | |
| MWR | The ratio of the number of water pixels that are not recognized as water and the number of actual water pixels | |
| MIoU | The average of the intersection and union of each type of predicted and actual value |
| Method | OA | FWR | MWR | MIoU |
|---|---|---|---|---|
| NDWI | 0.8769 | 0.1773 | 0.0690 | 0.7807 |
| SVM | 0.9216 | 0.0972 | 0.0607 | 0.8546 |
| DeeplabV3+ | 0.9566 | 0.0578 | 0.0310 | 0.9168 |
| U-Net | 0.9620 | 0.0396 | 0.0382 | 0.9267 |
| DEU-Net | 0.9730 | 0.0303 | 0.0245 | 0.9473 |
| Test Protocol | Test Protocol Description |
|---|---|
| Test A | Only the submerged range at t = 5 s |
| Test B | Only the submerged range at t = 1, 5 s |
| Test C | Only the submerged range at t = 1, 3, 5 s |
| Type | Content | Source | Purpose |
|---|---|---|---|
| Open-source dataset | GID | http://captain.whu.edu.cn/GID/ | To create datasets |
| AID | https://pan.baidu.com/s/1mifOBv6#list/path=%2F | ||
| Remote-sensing data | GF-1 | http://www.gscloud.cn/search | To create datasets |
| Landsat-8 OLI | http://eds.ceode.ac.cn/nuds/freedataquery | To create datasets and obtain flooding data | |
| Basic geographic data | Elevation Map | https://www.databox.store/Home/Index | To assess the loss of flood damage |
| Land-use map | https://www.databox.store/Home/Index | ||
| Chinese administrative divisions map | https://www.databox.store/Home/Index | ||
| Population-density map | https://www.worldpop.org/ | ||
| Road-distribution map | https://www.openstreetmap.org/ | ||
| Statistical data | Anhui Province’s statistical yearbook | http://tjj.ah.gov.cn/ssah/qwfbjd/tjnj/index.html | To verify the accuracy of experimental results |
| Official Public Releases | http://yjt.ah.gov.cn/public/9377745/145229191.html |
| Data Simulation Time | Correct Rate | Misclassification Rate | Omission Rate | Kappa |
|---|---|---|---|---|
| August 5 | 0.9540 | 0.0602 | 0.0272 | 0.9078 |
| September 6 | 0.9606 | 0.0470 | 0.0288 | 0.9211 |
| Time | Place | Description of Event | Results Involved | Data Source |
|---|---|---|---|---|
| 19 August 2020 | Feidong County | There was flood water depth over 3 meters in some parts, on 7 August, and on 17 August, it was receded [38]. | 7.30 8.5 8.30 | Anhui Broadcasting Corporation |
| 22 September 2020 | Feixi County | Floodwaters have primarily receded in mid-September [39]. | 9.6 9.30 | Anhui Broadcasting Corporation |
| 29 September 2020 | Lujiang County | There was still no receding flooding in Tongda town [40]. | 9.30 | Lujiang County Government Official Website |
| 20 October 2020 | Lujiang County | Flood in Baihu Farm was drained at the end of September [41]. | 9.30 | Anhui Provincial Bureau of Statistics |
| Category | Evaluation Indicator | Serial Number |
|---|---|---|
| Study area characteristics | The census block density | U1 |
| Road network density | U2 | |
| Building density | U3 | |
| Farmland density | U4 | |
| Flood inundation attributes | Maximum submerged area | U5 |
| Average maximum submerged depth | U6 | |
| Average submerged duration | U7 |
| Evaluation Index | Very Low Loss | Low Loss | Moderate Loss | High Loss | Very High Loss |
|---|---|---|---|---|---|
| U1 | (215.76, 183.24, 0.1) | (531.99, 85.21, 0.1) | (1148.13, 437.95, 0.1) | (2032.10, 312.76, 0.1) | (3143.35, 630.97, 0.1) |
| U2 | (0.0588, 0.0499, 0.01) | (0.1791, 0.0523, 0.01) | (0.3318, 0.0773, 0.01) | (0.6705, 0.2103, 0.01) | (1.0329, 0.0975, 0.01) |
| U3 | (0.0240, 0.0203, 0.01) | (0.0970, 0.0417, 0.01) | (0.1951, 0.0417, 0.01) | (0.2932, 0.0417, 0.01) | (0.3913, 0.0417, 0.01) |
| U4 | (0.1288, 0.1093, 0.01) | (0.3293, 0.0610, 0.01) | (0.4967, 0.0811, 0.01) | (0.6374, 0.0383, 0.01) | (0.7249, 0.0360, 0.01) |
| U5 | (0.50, 0.42, 0.01) | (1.50, 0.42, 0.01) | (2.57, 0.48, 0.01) | (4.12, 0.84, 0.01) | (6.00, 0.76, 0.01) |
| U6 | (1.75, 1.49, 0.1) | (7.01, 2.98, 0.1) | (22.06, 9.80, 0.1) | (57.04, 19.90, 0.1) | (127.60, 40.03, 0.1) |
| U7 | (0.61, 0.52, 0.1) | (2.12, 0.76, 0.1) | (5.46, 2.07, 0.1) | (9.78, 1.61, 0.1) | (15.76, 3.47, 0.1) |
| County Unit | Very Low Loss | Low Loss | Moderate Loss | High Loss | Very High Loss | Level | Official Released |
|---|---|---|---|---|---|---|---|
| Yaohai District | 0.517 | 0.223 | 0.102 | 0.054 | 0.019 | Very low loss | No mention |
| Luyang District | 0.172 | 0.629 | 0.264 | 0.032 | 0.057 | Low loss | No mention |
| Shushan District | 0.463 | 0.209 | 0.083 | 0.097 | 0.000 | Very low loss | No mention |
| Baohe District | 0.231 | 0.629 | 0.264 | 0.032 | 0.057 | Low loss | No mention |
| Chaohu City | 0.000 | 0.038 | 0.221 | 0.375 | 0.426 | Very high loss | Hard-hit |
| Changfeng County | 0.379 | 0.425 | 0.154 | 0.169 | 0.022 | Low loss | No mention |
| Feidong County | 0.125 | 0.301 | 0.395 | 0.113 | 0.025 | Moderate loss | No mention |
| Feixi County | 0.104 | 0.092 | 0.368 | 0.394 | 0.212 | High loss | Hard-hit |
| Lujiang County | 0.000 | 0.152 | 0.104 | 0.328 | 0.539 | Very high loss | Hard-hit |
| Wuwei County | 0.043 | 0.116 | 0.253 | 0.314 | 0.182 | High loss | Hard-hit |
| Shucheng County | 0.079 | 0.211 | 0.535 | 0.268 | 0.118 | Moderate loss | Hard-hit |
| Hanshan County | 0.108 | 0.102 | 0.294 | 0.377 | 0.176 | High loss | Hard-hit |
| He County | 0.215 | 0.208 | 0.317 | 0.142 | 0.093 | Moderate loss | Hard-hit |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Dai, X.; Shou, W.; Wang, J.; Ruan, X. An Efficient Decision Support System for Flood Inundation Management Using Intermittent Remote-Sensing Data. Remote Sens. 2021, 13, 2818. https://doi.org/10.3390/rs13142818
Sun H, Dai X, Shou W, Wang J, Ruan X. An Efficient Decision Support System for Flood Inundation Management Using Intermittent Remote-Sensing Data. Remote Sensing. 2021; 13(14):2818. https://doi.org/10.3390/rs13142818
Chicago/Turabian StyleSun, Hai, Xiaoyi Dai, Wenchi Shou, Jun Wang, and Xuejing Ruan. 2021. "An Efficient Decision Support System for Flood Inundation Management Using Intermittent Remote-Sensing Data" Remote Sensing 13, no. 14: 2818. https://doi.org/10.3390/rs13142818
APA StyleSun, H., Dai, X., Shou, W., Wang, J., & Ruan, X. (2021). An Efficient Decision Support System for Flood Inundation Management Using Intermittent Remote-Sensing Data. Remote Sensing, 13(14), 2818. https://doi.org/10.3390/rs13142818