
Results of the Dragon 4 Project on New Ocean Remote Sensing Data for Operational Applications

 , , , , ,
, , , , ,  ,
, 

Abstract
:
1. Introduction
- a
- New Satellite Data applied to Sea Ice Parameter Extraction and Sea Ice Monitoring (T1).
- b
- New satellite altimeters validation and oceanic application (T2).
- c
- Sea surface salinity estimates from active/passive microwave imagers (T3).
2. Description of Sub-Projects and Data Utilization
2.1. List of Sub-Projects and Teaming
2.2. Summary Table of EO and other Data Utilized
3. Sub-Projects’ Research and Approach
3.1. P1 Research and Approach
3.1.1. Research Aims
3.1.2. Research Approach
3.2. P2 Research and Approach
3.2.1. Research Aims
3.2.2. Research Approach
3.3. P3 Research and Approach
3.3.1. Research Aims
3.3.2. Research Approach
4. Research Results and Conclusions
4.1. P1 Results and Conclusions
4.1.1. Results
4.1.2. Conclusions
4.2. P2 Results and Conclusions
4.2.1. Results
4.2.2. Conclusions
4.3. P3 Results and Conclusions
4.3.1. Results
4.3.2. Conclusions
- (1)
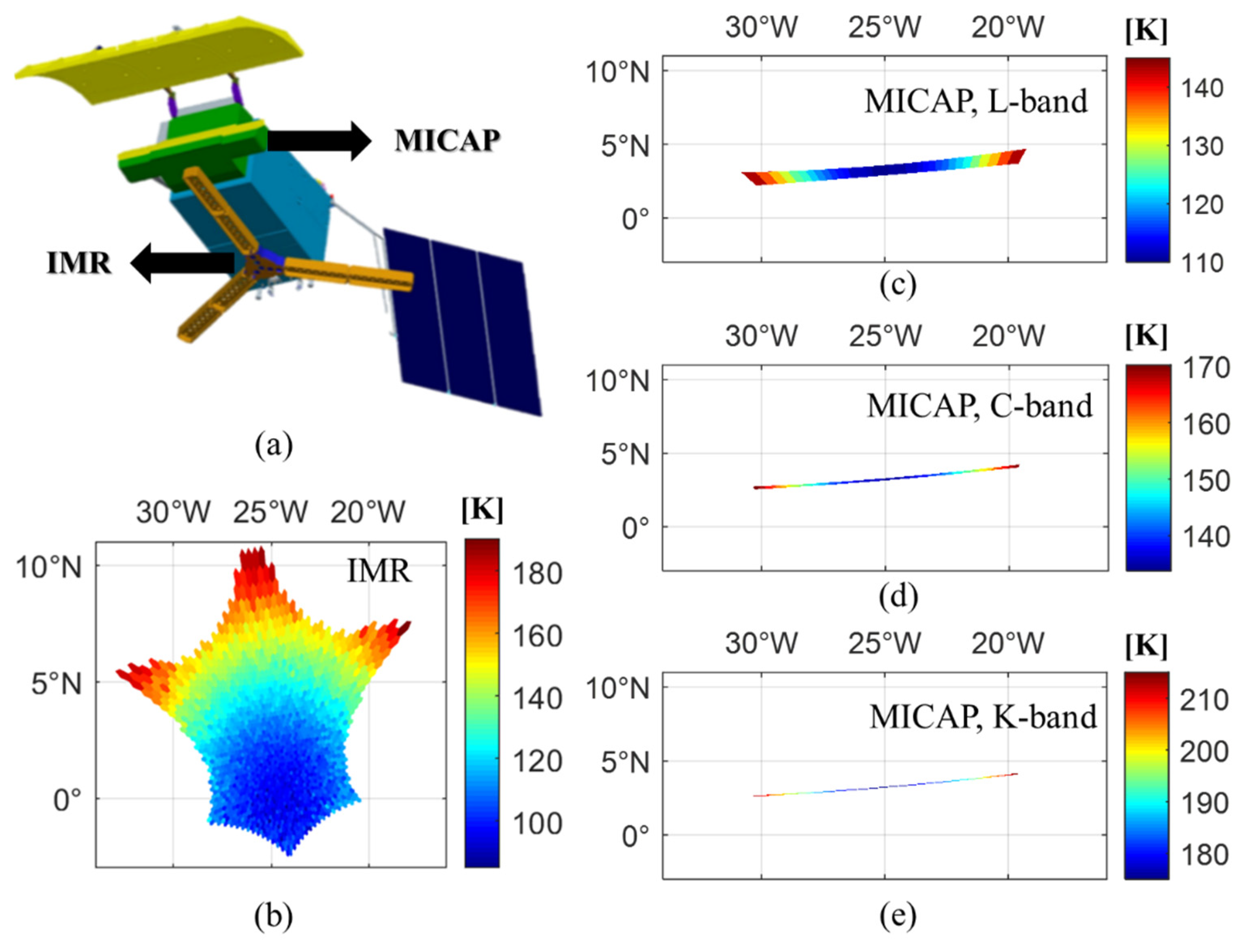
- Based on the 2D and 1D characteristics of the payload IMR and MICAP, 2D IMR has a finer spatial resolution. However, as a 1D interferometric device, MICAP, with lower system complexity, achieves better TB radiometric resolution than IMR.
- (2)
- From the performance simulation, the combined retrieval with the assistance of the C- and K-band radiometers and the L-band scatterometer helps to achieve better SSS accuracy. In particular, the best SSS performance was achieved with the combination of all available measurements from the two payloads.
- (3)
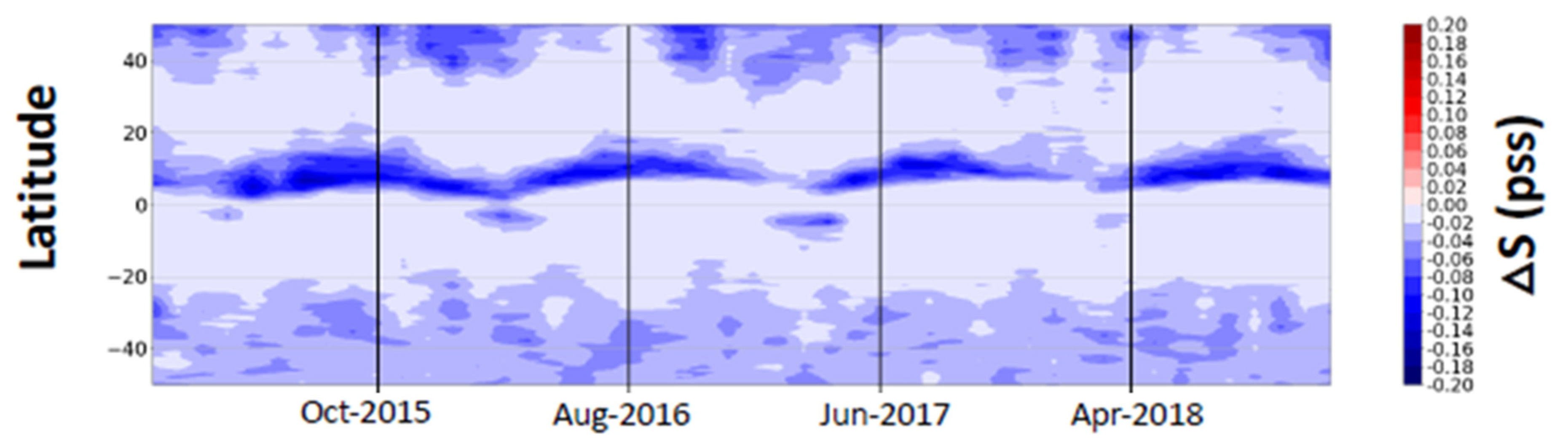
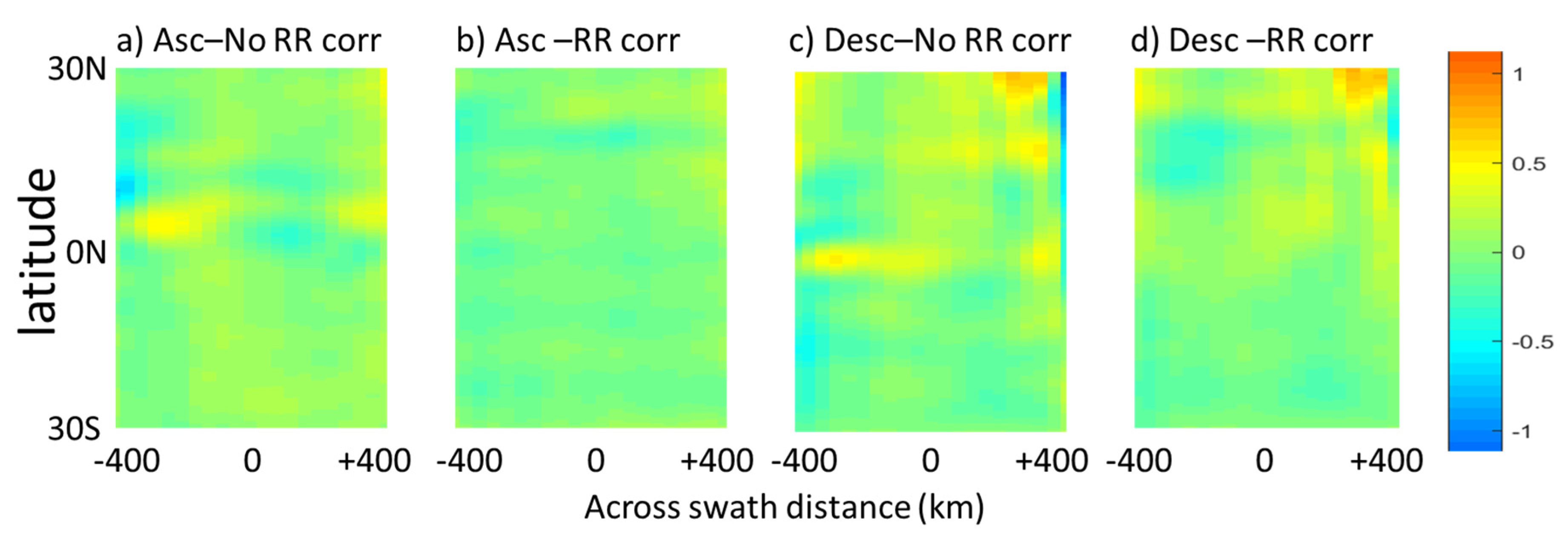
- Under rainy conditions, the satellite SSS retrieved at 1 cm depth from passive L-Band measurements differs from the bulk in situ SSS by several salinity units under moderate to high rain events. When averaged spatially and temporally, the satellite SSS in rainy latitudinal bands is still underestimated by 0.1 pss or even more. Attempts have been made to correct them. Using a simple ∆S-RR relationship, we show that the main systematic differences of SMOS versus bulk in situ salinities are corrected. Alternatively, based on the combined passive and active Aquarius observations, a SSS retrieval algorithm under rain conditions is developed that decreases the RMS difference with respect to Argo bulk salinity to about 0.7 pss.
- (4)
- Based on the Haiyang-2B C-, X-, and K- bands microwave radiometer, the high wind speed retrieval algorithm during tropical cyclones is developed, and the RMS between Haiyang-2B wind and the SMAP wind is 2.21 m/s with a maximum wind speed up to 50 m/s.
5. Overall Discussion
6. Main Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
| AC | Across-track |
| AL | Along-track |
| ASCAT | Advanced SCATterometer |
| BCF | Bézier Curve Fitting |
| BDE | Boundary Definition Error |
| CFOSAT | Chinese-French Oceanic SATellite |
| CTD | Conductivity, Temperature, and Depth |
| DD | Delay-Doppler |
| EO | Earth Observation |
| FF-SAR | Fully-Focussed SAR |
| GPM | Global Precipitation Measurement |
| IMERG | Integrated Multi-satellitE Retrievals for GPM |
| IRF | Interferometric Microwave Radiometer |
| IRF | Impulse Response Function |
| L1A | Level-1 A |
| L1B | Level-1 B |
| L1C | Level-1 C |
| L2 | Level-2 |
| L3 | Level-3 |
| L3OS | Level-3 Ocean Salinity |
| MAE | Mean Absolute Error |
| MICAP | Microwave Imager Combined Active and Passive |
| MIRAS | Microwave Imaging Radiometer using Aperture Synthesis |
| NTC | Non-Time-Critical |
| OIB | Operation Ice Bridge |
| PDRE | Propagated Drift Retrieval Error |
| RA | Radar Altimetry |
| RF | Random Forest |
| RMS | Root Mean Square |
| RMSE | Root Mean Square Error |
| RR | Rain Rate |
| SAR | Synthetic Aperture Radar |
| SIRAL | SAR Interferometric Radar Altimeter |
| SLA | Sea Level Anomaly |
| SLC | Single-Look Complex |
| SMAP | Soil Moisture Active Passive |
| SMOS | Soil Moisture and Ocean Salinity |
| SRAL | Sentinel-3 Ku/C Radar Altimeter |
| SSH | Sea Surface Height |
| SSS | Sea Surface Salinity |
| SST | Sea Surface Temperature |
| SSWS | Sea Surface Wind Speeds |
| SWH | Significant Wave Height |
| SWIM | Surface Waves Investigation and Monitoring instrument |
| TB | Brightness Temperature |
| WS | Wind Speed |
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-Project | Team | Member | Affiliation |
|---|---|---|---|
| P1 | Chinese | Dr. Meng Bao | First Institute of Oceanography (FIO) |
| Dr. Xi Zhang | First Institute of Oceanography (FIO) and Technology Innovation Centre for Ocean Telemetry | ||
| Dr. Bin Zou | National Satellite Ocean Application Service | ||
| Li-jian Shi | National Satellite Ocean Application Service | ||
| Chang-qing Ke | Nanjing University | ||
| Ning Wang | North China Marine Forecasting Centre | ||
| European | Prof. Wolfgang Dierking | Alfred Wegener Institute Helmholtz Centre for Polar and Marine Research and the Centre for Integrated Remote Sensing and Forecasting for Arctic Operations, The Arctic University of Norway | |
| Markku Similä | Finnish Meteorological Institute | ||
| Marko Mäkynen | Finnish Meteorological Institute | ||
| Juha Karvonen | Finnish Meteorological Institute | ||
| Rasmus Tonboe | Danish Meteorological Institute | ||
| P2 | Chinese | Dr. Yongjun Jia | National Satellite Ocean Application Service |
| Mr. Chenqing Fan | First Institute of Oceanography (FIO), Ministry of Natural Resources (MNR) | ||
| Dr. Wei Cui | First Institute of Oceanography (FIO), Ministry of Natural Resources (MNR) | ||
| Dr. Jungang Yang | First Institute of Oceanography (FIO), Ministry of Natural Resources (MNR) | ||
| European | Dr. Eduard Makhoul | isardSAT, S.L. | |
| Dr. Ferran Gibert | isardSAT, S.L. | ||
| Dr. Alba Granados | isardSAT, S.L. | ||
| P3 | Chinese | Prof. Xiaobin Yin | Ocean University of China, Qingdao |
| Dr. Yan Li | Piesat Information Technology Co., Ltd., Beijing | ||
| Dr. Kunsheng Xiang | Piesat Information Technology Co., Ltd., Beijing | ||
| Dr. Jin Wang | Qingdao University | ||
| European | Prof. Jacquelin Boutin | Sorbonne University, CNRS–IRD–MNHM and LOCEAN | |
| Dr. Alexandre Supply | LOCEAN | ||
| Dr. Jean-Luc Vergely | LOPS and ACRI-st |
Appendix C
- Karvonen, J.; Shi, L.; Cheng, B.; Similä, M.; Mäkynen, M.; Vihma, T. Bohai Sea Ice Parameter Estimation Based on Thermodynamic Ice Model and Earth Observation Data. Remote Sens. 2017, 9, 234.
- Yin, X.; Boutin, J.; Dinnat, E.; Song, Q.; Martin, A. Roughness and foam signature on SMOS MIRAS brightness temperatures. A semi theoretical approach. Remote Sens. 2016.
- Zeng, T.; Shi, L.; Mäkynen, M.; Cheng, B.; Zou, J.; Zhang, Z. Sea ice thickness analyses for the Bohai Sea using MODIS thermal infrared imagery. Acta Oceanol. Sin. 2016, 35, 96–104.
References
- Shen, X.; Similä, M.; Dierking, W.; Zhang, X.; Ke, C.; Liu, M.; Wang, M. A New Retracking Algorithm for Retrieving Sea Ice Freeboard from CryoSat-2 Radar Altimeter Data during Winter–Spring Transition. Remote Sens. 2019, 11, 1194. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Zhang, J.; Meng, J. Techniques for Sea Ice Characteristics Extraction and Sea Ice Monitoring Using Multi-Sensor Satellite Data in the Bohai Sea-Dragon 3 Programme Final Report (2012–2016). In Proceedings of the Dragon 3 Final Results and Dragon 4 Kick-Off Symposium, Wuhan, China, 4–8 July 2016. [Google Scholar]
- Garcia-Mondéjar, A.; Martínez, B.; Gao, Q.; Escorihuela, M.J.; García, P.; Yang, J.; Liao, J. Measuring the Lake Level Evolution in the Qinghai-Tibet Plateau with Radar Altimeters. In Proceedings of the Dragon 3 Final Results and Dragon 4 Kick-Off Symposium, Wuhan, China, 4–8 July 2016. [Google Scholar]
- Dierking, W.; Ji, Y.; Similä, M. The Dragon-2 Sea Ice Project: Overview and Status after Two Years. In Proceedings of the Dragon-2 Mid-Term Results Symposium 2008–2010, Guiling, China, 17–21 May 2010. [Google Scholar]
- Wingham, D.; Francis, C.; Baker, S.; Bouzinac, C.; Brockley, D.; Cullen, R.; de Chateau-Thierry, P.; Laxon, S.; Mallow, U.; Mavrocordatos, C.; et al. CryoSat: A mission to determine the fluctuations in Earth’s land and marine ice fields. Adv. Space Res. 2006, 37, 841–871. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The global monitoring for environment and security (GMES) sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Donlon, C.; Cullen, R.; Giulicchi, L.; Vuilleumier, P.; Richard Francis, C.; Kuschnerus, M.; Simpson, W.; Bouridah, A.; Caleno, M.; Bertoni, R.; et al. The Copernicus Sentinel-6 mission: Enhanced continuity of satellite sea level measurements from space. Remote Sens. Environ. 2021, 258, 112395. [Google Scholar] [CrossRef]
- Raney, R.K. The delay/Doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Makhoul, E.; Roca, M.; Ray, C.; Escolà, R.; Garcia-Mondéjar, A. Evaluation of the precision of different Delay-Doppler Processor (DDP) algorithms using CryoSat-2 data over open ocean. Adv. Space Res. 2018. [Google Scholar] [CrossRef]
- Egido, A.; Smith, W. Fully Focused SAR Altimetry: Theory and Applications. IEEE Trans. Geosci. Remote Sens. 2017, 1–15. [Google Scholar] [CrossRef]
- Guccione, P.; Scagliola, M.; Giudici, D. 2D Frequency Domain Fully Focused SAR Processing for High PRF Radar Altimeters. Remote Sens. 2018, 10, 1943. [Google Scholar] [CrossRef] [Green Version]
- Kleinherenbrink, M.; Naeije, M.; Slobbe, C.; Egido, A.; Smith, W. The performance of CryoSat-2 fully-focussed SAR for inland water-level estimation. Remote Sens. Environ. 2020, 237, 111589. [Google Scholar] [CrossRef]
- Reul, N.; Grodsky, S.A.; Arias, M.; Boutin, J.; Catany, R.; Chapron, B.; D’Amico, F.; Dinnat, E.; Donlon, C.; Fore, A.; et al. Sea surface salinity estimates from spaceborne L-band radiometers: An overview of the first decade of observation (2010–2019). Remote Sens. Environ. 2020, 242, 111769. [Google Scholar] [CrossRef]
- Boutin, J.; Chao, Y.; Asher, W.E.; Delcroix, T.; Drucker, R.; Drushka, K.; Kolodziejczyk, N.; Lee, T.; Reul, N.; Reverdin, G.; et al. Satellite and In Situ Salinity: Understanding Near-Surface Stratification and Subfootprint Variability. Bull. Am. Meteorol. Soc. 2016, 97, 1391–1407. [Google Scholar] [CrossRef] [Green Version]
- Reul, N.; Chapron, B.; Zabolotskikh, E.; Donlon, C.; Quilfen, Y.; Guimbard, S.; Piolle, J.F. A revised L-band radio-brightness sensitivity to extreme winds under tropical cyclones: The five year SMOS-storm database. Remote Sens. Environ. 2016, 180, 274–291. [Google Scholar] [CrossRef] [Green Version]
- Reul, N.; Tenerelli, J.; Chapron, B.; Vandemark, D.; Quilfen, Y.; Kerr, Y. SMOS satellite L-band radiometer: A new capability for ocean surface remote sensing in hurricanes. J. Geophys. Res. Oceans 2012, 117, C2. [Google Scholar] [CrossRef] [Green Version]
- ASCAT Wind Product User Manual, Ocean and Sea Ice SAF, EUMETSAT Advanced Retransmission Service, Version 1.16. 2 October 2019. Available online: https://scatterometer.knmi.nl/publications/pdf/ASCAT_Product_Manual.pdf (accessed on 1 July 2021).
- Torres, R.; Snoeij, P.M.; Davidson, M.; Bibby, D.; Lokas, S. The Sentinel-1 mission and its application capabilities. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 1703–1706. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS Mission: New Tool for Monitoring Key Elements ofthe Global Water Cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Wang, M.; Jiang, J. China’s high-resolution optical remotesensing satellites and their mapping applications. Geospat. Inf. Sci. 2021, 24, 85–94. [Google Scholar] [CrossRef]
- Sun, J.; Yu, W.; Deng, Y. The SAR Payload Design and Performance for the GF-3 Mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Xin, L.; Guo, Y.; Gao, D.; Kong, X.; Jia, X. Super-Resolution for GaoFen-4 Remote Sensing Images. IEEE Geosci. Remote Sens. Lett. 2018, 15, 28–32. [Google Scholar] [CrossRef]
- Bao, L.; Gao, P.; Peng, H.; Jia, Y.; Shum, C.K.; Lin, M.; Guo, Q. First accuracy assessment of the HY-2A altimeter sea surface height observations: Cross-calibration results. Adv. Space Res. 2015, 55, 90–105. [Google Scholar] [CrossRef]
- Ma, C.; Zhou, W.; Yin, X.; Yu, R.; Diao, N.; Wang, S. Comparisons between HY-2B SMR and GMI brightness temperature from 6 To 37 GHz over the ocean. In Proceedings of the IGARSS 2019—IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 8455–8458. [Google Scholar] [CrossRef]
- Hauser, D.; Tourain, C.; Lachiver, J.M. CFOSAT: A new mission in orbit to observe simultaneously wind and waves at the ocean surface. Space Res. Today 2019, 206, 15–21. [Google Scholar]
- Huffman, G.J. GPM IMERG Final Precipitation L3 Half Hourly 0.1 Degree x 0.1 Degree V05B; Goddard Earth Sciences Data and Information Services Center (GESDISC): Greenbelt, MD, USA, 2018. [Google Scholar] [CrossRef]
- Silva, J.; Parisot, P.; Vaze, P.; Zaouche, G. Jason-3 Mission Overview. Presentation in OSTST 2016. 2016. Available online: https://meetings.aviso.altimetry.fr/fileadmin/user_upload/tx_ausyclsseminar/files/OPEN_05_OSTST_2016_Jason-3_status_gzaouche_v1-0_9h55.pdf (accessed on 1 July 2021).
- Meissner, T.; Ricciardulli, L.; Wentz, F. Capability of the SMAP Mission to Measure Ocean Surface Winds in Storms. Bull. Am. Meteorol. Soc. 2017, 98, 1660–1677. [Google Scholar] [CrossRef]
- Gaillard, F.; Reynaud, T.; Thierry, V.; Kolodziejczyk, N.; von Schuckmann, K. In Situ–Based Reanalysis of the Global Ocean Temperature and Salinity with ISAS: Variability of the Heat Content and Steric Height. J. Clim. 2016, 29, 1305–1323. Available online: https://journals.ametsoc.org/view/journals/clim/29/4/jcli-d-15-0028.1.xml (accessed on 16 July 2021). [CrossRef]
- Kolodziejczyk, N.; Prigent-Mazella, A.; Gaillard, F. ISAS-15 temperature and salinity gridded fields. SEANOE 2017. [Google Scholar] [CrossRef]
- National Data Buoy Center (NDBC) Stennis Space Center. NDBC Web Data Guide. October 2015. Available online: https://www.ndbc.noaa.gov/docs/ndbc_web_data_guide.pdf (accessed on 1 July 2021).
- Shen, X.; Ke, C.Q.; Xie, H.; Li, M.; Xia, W. A comparison of Arctic sea ice freeboard products from Sentinel-3A and CryoSat-2 data. Int. J. Remote Sens. 2020, 41, 2789–2806. [Google Scholar] [CrossRef]
- Lohse, J.; Doulgeris, A.; Dierking, W. An Optimal Decision-Tree Design Strategy and Its Application to Sea Ice Classification from SAR Imagery. Remote Sens. 2019, 11, 1574. [Google Scholar] [CrossRef] [Green Version]
- Lohse, J.; Doulgeris, A.; Dierking, W. Mapping sea-ice types from Sentinel-1 considering the surface- type dependent effect of incidence angle. Ann. Glaciol. 2020, 1–11. [Google Scholar] [CrossRef]
- Griebel, J.; Dierking, W. Impact of sea ice drift retrieval errors, discretization and grid type on calculations of sea ice deformation. Remote Sens. 2018, 10, 393. [Google Scholar] [CrossRef] [Green Version]
- Dierking, W.; Stern, H.L.; Hutchings, J.K. Estimating statistical errors in retrievals of ice velocity and deformation parameters from satellite images and buoy arrays. Cryosphere 2020, 14, 2999–3016. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, Y.; Zhang, J.; Meng, J.; Li, X.; Li, X. An Algorithm for Sea Ice Drift Retrieval Based on Trend of Ice Drift Constraints from Sentinel-1 SAR Data. J. Coast. Res. 2020, 102, 113–126. [Google Scholar] [CrossRef]
- Wang, R.; Huang, D.; Zhang, X.; Wei, P. Combined pattern matching and feature tracking for Bohai Sea ice drift detection using Gaofen-4 imagery. Int. J. Remote Sens. 2020, 41, 7486–7508. [Google Scholar] [CrossRef]
- Liang, G.; Yang, J.; Wang, J. Accuracy Evaluation of CFOSAT SWIM L2 Products Based on NDBC Buoy and Jason-3 Altimeter Data. Remote Sens. 2021, 13, 887. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.; Cui, W.; Muñoz, M.; Makhoul, E. Primary Analysis of Oceanic Mesoscale Eddies Observation Abilities by Sentinel-3A SRAL. J. Geod. Geoinf. Sci. 2021, 4, 56–62. [Google Scholar] [CrossRef]
- Cui, W.; Wang, W.; Zhang, J.; Yang, J. Improvement of Sea Surface Height Measurements of HY-2A Satellite Altimeter Using Jason-2. Mar. Geod. 2018, 41, 632–648. [Google Scholar] [CrossRef]
- Le Traon, P.Y.; Nadal, F.; Ducet, N. An Improved Mapping Method of Multisatellite Altimeter Data. J. Atmos. Ocean. Technol. 1998, 15, 522–534. [Google Scholar] [CrossRef]
- Ray, C.; Martin-Puig, C.; Clarizia, M.P.; Ruffini, G.; Dinardo, S.; Gommenginger, C.; Benveniste, J. SAR altimeter backscattered waveform model. IEEE Trans. Geosci. Remote Sens. 2015, 53, 911–919. [Google Scholar] [CrossRef]
- Supply, A.; Boutin, J.; Reverdin, G.; Vergely, J.-L.; Bellenger, H. Variability of Satellite Sea Surface Salinity under Rainfall. In Satellite Precipitation Measurement. Advances in Global Change Research; Levizzani, V., Kidd, C., Kirschbaum, D., Kummerow, C., Nakamura, K., Turk, F., Eds.; Springer: Cham, Switzerland, 2020; Volume 69. [Google Scholar] [CrossRef]
- Mohamed, N.; Majid, A.A.; Piah, A.R.M. Data fitting by G1 rational cubic Bézier curves using harmony search. Egypt. Inform. J. 2015, 16, 175–185. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Zhang, J.; Jia, Y.; Fan, C.; Cui, W. Validation of Sentinel-3A/3B and Jason-3 Altimeter Wind Speeds and Significant Wave Heights Using Buoy and ASCAT Data. Remote Sens. 2020, 12, 2079. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.; Wang, C. Sentinel-3A SRAL Global Statistical Assessment and Cross-Calibration with Jason-3. Remote Sens. 2019, 11, 1573. [Google Scholar] [CrossRef] [Green Version]
- Jia, Y.; Yang, J.; Lin, M.; Zhang, Y.; Ma, C.; Fan, C. Global Assessments of the HY-2B Measurements and Cross-Calibrations with Jason-3. Remote Sens. 2020, 12, 2470. [Google Scholar] [CrossRef]
- Mulet, S.; Rio, M.-H.; Etienne, H.; Dibarboure, G.; Picot, N. The New CNES-CLS18 Mean Dynamic Topography. OceanPredict’19. Available online: https://www.godae.org/~godae-data/OP19/posters/P9-Poster_MDT18.pdf (accessed on 1 July 2021).
- Mertikas, S.; Tripolitsiotis, A.; Donlon, C.; Mavrocordatos, C.; Femenias, P.; Borde, F.; Frantzis, X.; Kokolakis, K.; Guinle, T.; Tziavos, I.; et al. The ESA Permanent Facility for Altimetry Calibration: Monitoring Performance of Radar Altimeters for Sentinel-3A, Sentinel-3B and Jason-3 Using Transponder and Sea-Surface Calibrations with FRM Standards. Remote Sens. 2020, 12, 2642. [Google Scholar] [CrossRef]
- Smith, W.; Scharroo, R. Waveform Aliasing in Satellite Radar Altimetry. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1671–1682. [Google Scholar] [CrossRef]
- Supply, A.; Boutin, J.; Vergely, J.-L.; Martin, N.; Hasson, A.; Reverdin, G.; Mallet, C.; Viltard, N. Precipitation Estimates from SMOS Sea-Surface Salinity. Q. J. R. Meteorol. Soc. 2018, 144, 103–119. [Google Scholar] [CrossRef] [Green Version]
- Reverdin, G.; Supply, A.; Drushka, K.; Thompson, E.J.; Asher, W.E.; Lourenço, A. Intense and Small Freshwater Pools from Rainfall Investigated During Spurs-2 on 9 November 2017 in the Eastern Tropical Pacific. J. Geophys. Res. Oceans 2020, 125. [Google Scholar] [CrossRef]
- Kyla, D.; William, E.A.; Andrew, T.J.; Elizabeth, J.T.; Suneil, I.; Clark, D. Capturing Fresh Layers with the Surface Salinity Profiler. Oceanography 2019, 32. [Google Scholar] [CrossRef]
- Supply, A.; Boutin, J.; Vergely, J.-L.; Kolodziejczyk, N.; Reverdin, G.; Reul, N.; Tarasenko, A. New insights into SMOS sea surface salinity retrievals in the Arctic Ocean. Remote Sens. Environ. 2020, 249, 112027. [Google Scholar] [CrossRef]











| Topic | Sub-Project | Project Leaders |
|---|---|---|
| New Satellite Data applied to Sea Ice Parameter Extraction and Sea Ice Monitoring (T1) | Techniques for Sea Ice Parameter Extraction and Sea Ice Monitoring Using New Satellite Data (P1—No. 32292_1) |
|
| New satellite altimeters validation and oceanic application (T2) | Data validation and oceanic application of new satellite altimeters and SWIM (P2—No. 32292_2) |
|
| Sea surface salinity estimates from active/passive microwave imagers (T3) | Sea surface salinity algorithm based on combined active/passive microwave imagers (P3—No. 32292_3) |
|
| Data Source | Platform | Instrument | Input Data Processing Level | References | Databank 1 | Applicable Sub-Project |
|---|---|---|---|---|---|---|
| European EO satellites | CryoSat-2 | SIRAL | L1B, L2 | [5] | https://science-pds.cryosat.esa.int | P1, P2 |
| MetOp-A/B | ASCAT | L2 | [17] | https://scatterometer.knmi.nl/home/ | P2 | |
| Sentinel-1 | SAR | L1 SLC | [18] | https://scihub.copernicus.eu/ | P1 | |
| Sentinel-3A/B | SRAL | L1A, L1B, L2 | [6] | https://scihub.copernicus.eu/ | P1, P2 | |
| SMOS | MIRAS | L1C, L3OS | [19] | https://smos-diss.eo.esa.int/oads/access/, https://www.catds.fr/Products/Available-products-from-CPDC | P3 | |
| Chinese EO satellites | Gaofen-1 | Optical | L2 | [20] | Restricted access | P1 |
| Gaofen-3 | SAR | SLC | [21] | Restricted access | P1 | |
| Gaofen-4 | Optical | L2 | [22] | Restricted access | P1 | |
| Haiyang-2A/B | Radar Altimeter Radiometer | L2 L2 | [23] [24] | https://osdds.nsoas.org.cn | P2 P3 | |
| Other satellite data | CFOSAT | SWIM | L1A, L2 | [25] | https://osdds.nsoas.org.cn | P2 |
| IMERG | GPM | L4 | [26] | https://gpm.nasa.gov/data/imerg | P3 | |
| Jason-2/-3 | Poseidon-3 | L2 | [27] | https://www.aviso.altimetry.fr/en/data/data-access.htmlftp | P2 | |
| SMAP | Radiometer | L3 | [28] | http://data.remss.com/smap/wind/L3/v01.0/daily/FINAL/ | P3 | |
| Other non-satellite data | Argo | CTD | -- | [29] | [30] | P3 |
| NDBC Buoys | -- | -- | [31] | https://www.ndbc.noaa.gov/ | P2 | |
| OIB | Laser and EMS | -- | https://nsidc.org/data/icebridge | https://nsidc.org/icebridge/portal/map | P1 |
| Data Source | Sea Surface Height (SSH) (cm) | Significant Wave Height (SWH) (m) | Wind Speed (WS) (m/s) | |||
|---|---|---|---|---|---|---|
| Bias | RMSE 1 | Bias | RMSE | Bias | RMSE | |
| Sentinel-3A | 2.96 | 4.67 | 0.02 | 0.27 | −0.12 | 1.11 |
| Sentinel-3B | - | - | 0.05 | 0.32 | −0.23 | 1.13 |
| Jason-3 | - | - | 0.05 | 0.23 | −0.50 | 1.29 |
| Haiyang-2B | −0.83 | 5.27 | - | - | - | - |
| CFOSAT SWIM | - | - | 0.14 | 0.39 | - | - |
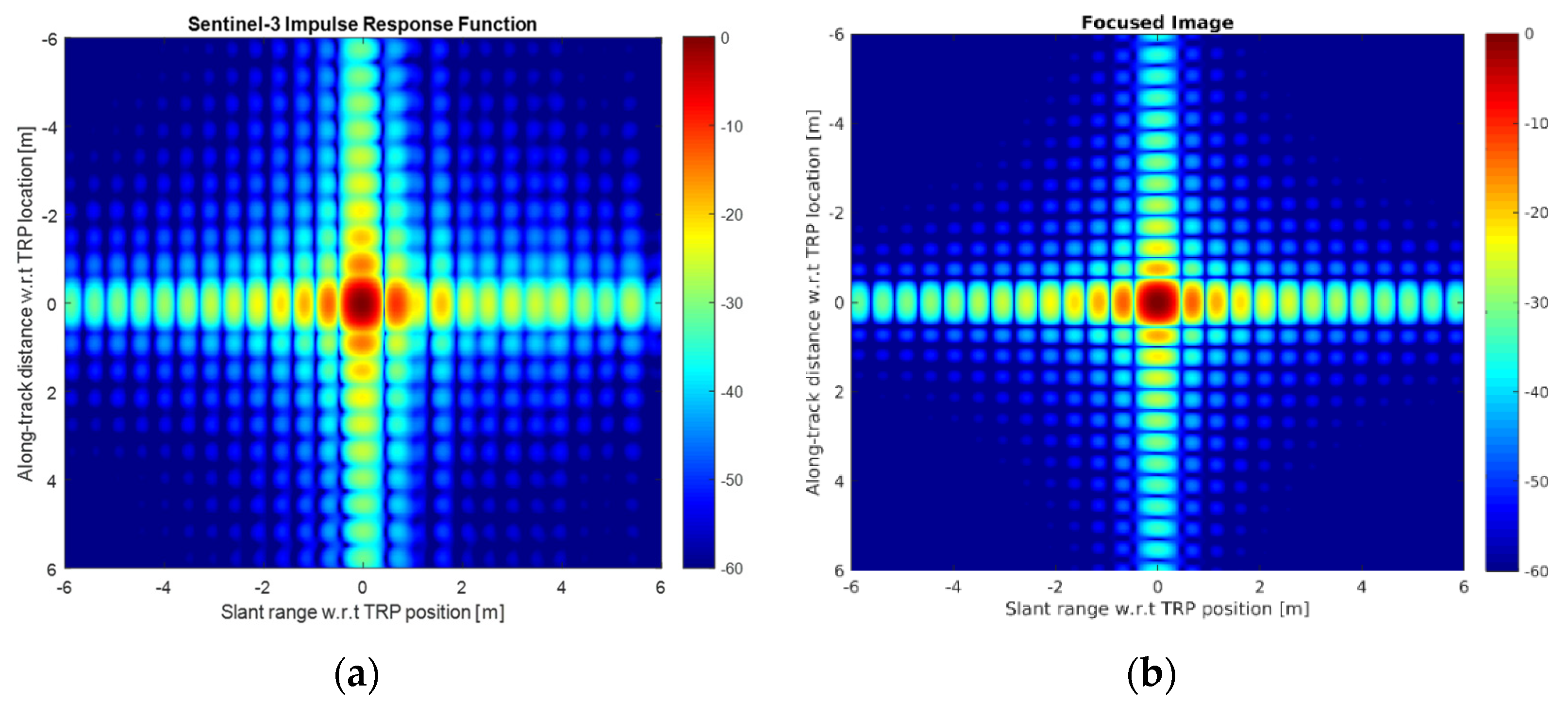
| Satellite (Instrument) | Data Source Type | Integration Time (s) | Theoretical Across-Track Resolution (m) | Theoretical Along-Track Resolution (m) | Measured Across Track Resolution (m) | Measured Along-Track Resolution (m) |
|---|---|---|---|---|---|---|
| Sentinel-3A (SRAL) | Real pass over Transponder | 1.95 | 0.415 | 0.54 | 0.411 | 0.576 |
| Sentinel-6 (Poseidon-4) | Simulated point target | 4.2 | 0.415 | 0.44 | 0.414 | 0.468 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gibert, F.; Boutin, J.; Dierking, W.; Granados, A.; Li, Y.; Makhoul, E.; Meng, J.; Supply, A.; Vendrell, E.; Vergely, J.-L.; et al. Results of the Dragon 4 Project on New Ocean Remote Sensing Data for Operational Applications. Remote Sens. 2021, 13, 2847. https://doi.org/10.3390/rs13142847
Gibert F, Boutin J, Dierking W, Granados A, Li Y, Makhoul E, Meng J, Supply A, Vendrell E, Vergely J-L, et al. Results of the Dragon 4 Project on New Ocean Remote Sensing Data for Operational Applications. Remote Sensing. 2021; 13(14):2847. https://doi.org/10.3390/rs13142847
Chicago/Turabian StyleGibert, Ferran, Jacqueline Boutin, Wolfgang Dierking, Alba Granados, Yan Li, Eduard Makhoul, Junmin Meng, Alexandre Supply, Ester Vendrell, Jean-Luc Vergely, and et al. 2021. "Results of the Dragon 4 Project on New Ocean Remote Sensing Data for Operational Applications" Remote Sensing 13, no. 14: 2847. https://doi.org/10.3390/rs13142847
APA StyleGibert, F., Boutin, J., Dierking, W., Granados, A., Li, Y., Makhoul, E., Meng, J., Supply, A., Vendrell, E., Vergely, J. -L., Wang, J., Yang, J., Xiang, K., Yin, X., & Zhang, X. (2021). Results of the Dragon 4 Project on New Ocean Remote Sensing Data for Operational Applications. Remote Sensing, 13(14), 2847. https://doi.org/10.3390/rs13142847