Author Contributions
Conceptualization, X.L. and H.Z.; methodology, X.L. and H.Z.; software, X.L.; validation, H.Z. and K.Z.; formal analysis, H.Z.; investigation, H.Z. and K.Z.; resources, Y.Y. and Y.Q.; data curation, H.Z.; writing—original draft preparation, H.Z.; writing—review and editing, K.Z. and H.Z.; visualization, H.Z.; supervision, W.Z.; project administration, X.L.; funding acquisition, X.L. All authors have read and agreed to the published version of the manuscript.
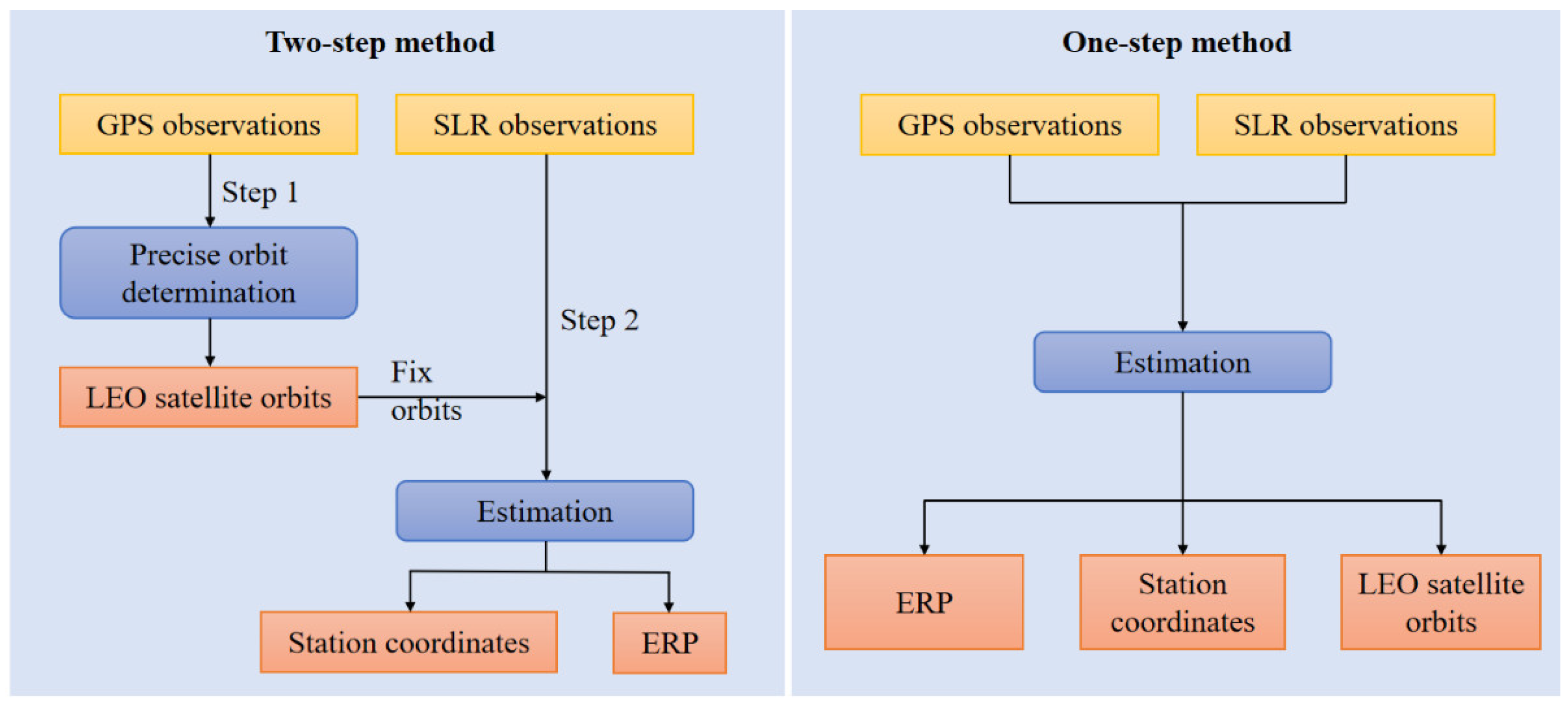
Figure 1.
Flowchart of two-step method and one-step method.
Figure 1.
Flowchart of two-step method and one-step method.
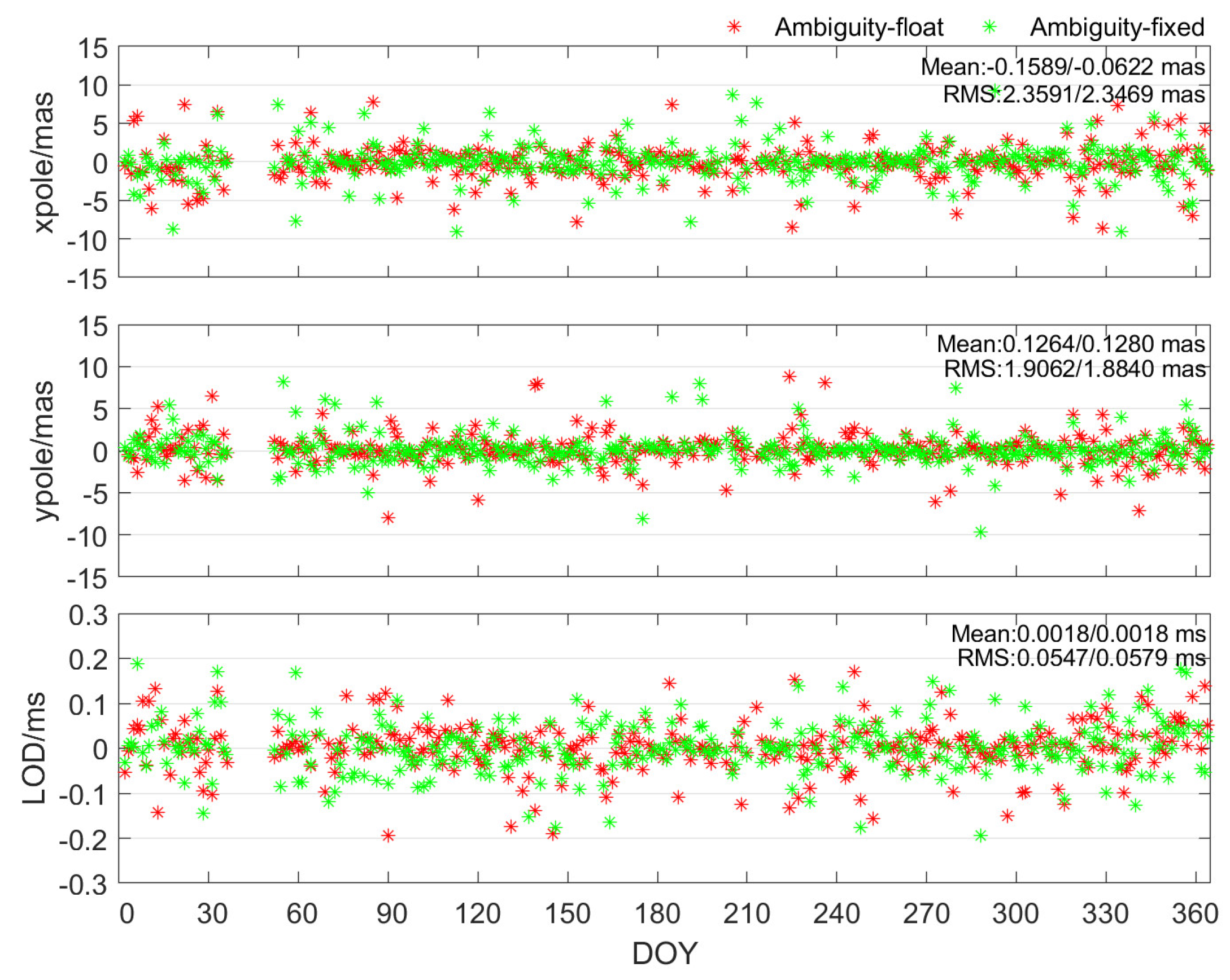
Figure 2.
Time series of pole coordinates and the length-of-day differences with respect to finals2000A.data series for the GRACE-D solutions based on the ambiguity-float orbit and ambiguity-fixed orbit. Values in the top right corner indicate the mean and RMS of differences for these two schemes.
Figure 2.
Time series of pole coordinates and the length-of-day differences with respect to finals2000A.data series for the GRACE-D solutions based on the ambiguity-float orbit and ambiguity-fixed orbit. Values in the top right corner indicate the mean and RMS of differences for these two schemes.
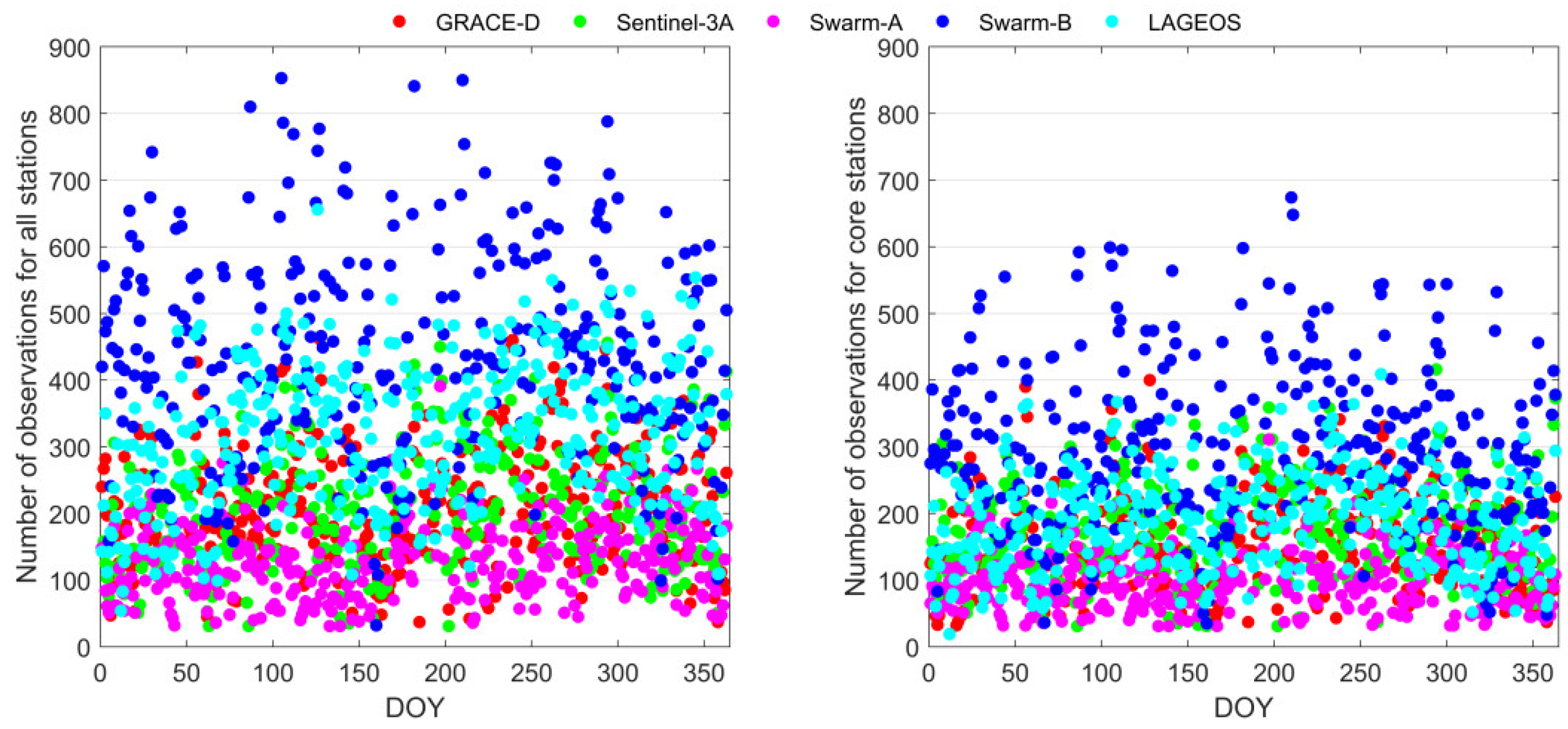
Figure 3.
Number of observations in 3-day solution for GRACE-D, Sentinel-3A, Swarm-A, Swarm-B, and LAGEOS (LAGEOS-1 + LAGEOS-2) collected by all stations (left) and core stations (right).
Figure 3.
Number of observations in 3-day solution for GRACE-D, Sentinel-3A, Swarm-A, Swarm-B, and LAGEOS (LAGEOS-1 + LAGEOS-2) collected by all stations (left) and core stations (right).
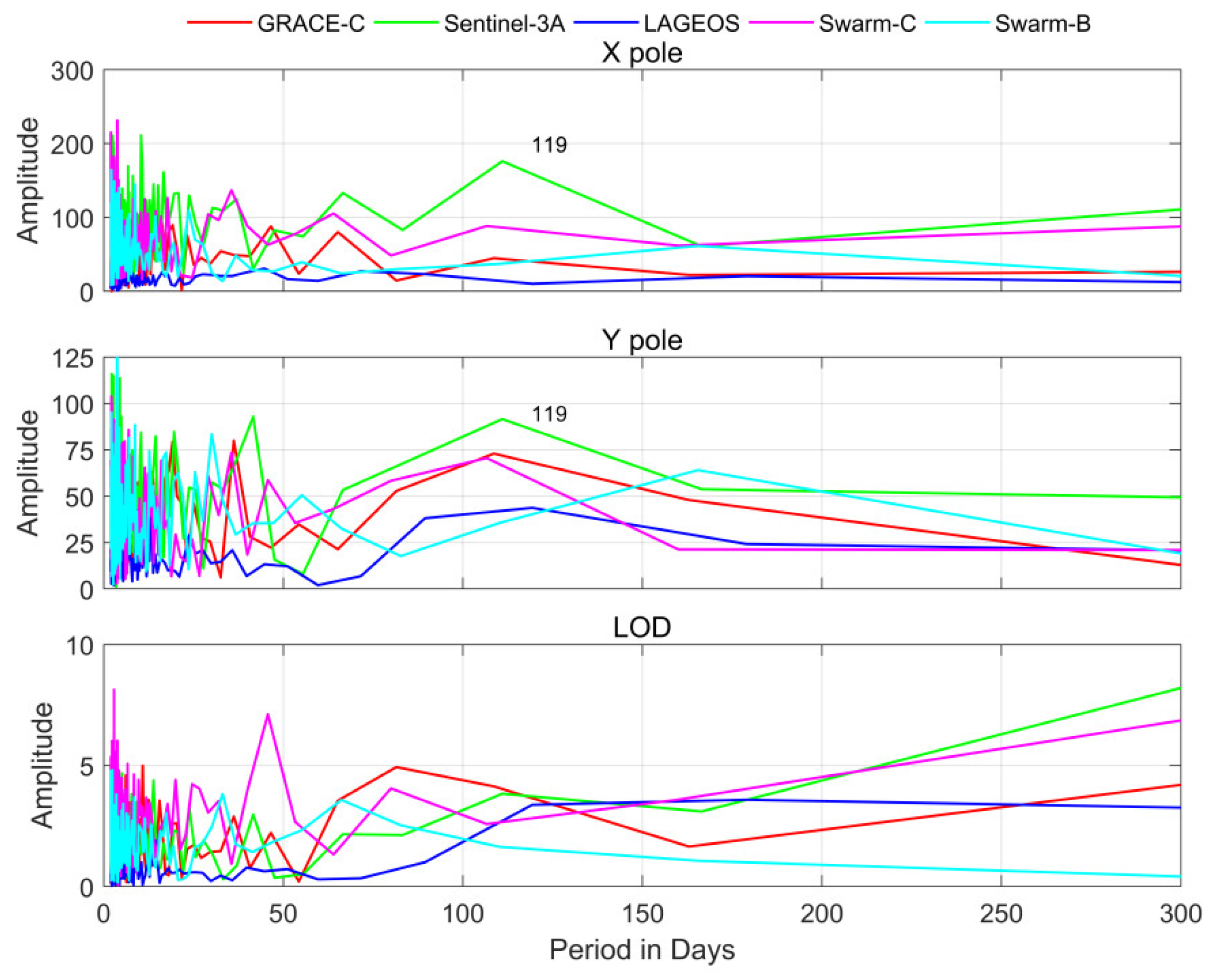
Figure 4.
Spectral analysis for GRACE-C, Sentinel-3A, LAGEOS (LAGEOS-1 and LAGEOS-2), Swarm-C and Swarm-B solutions.
Figure 4.
Spectral analysis for GRACE-C, Sentinel-3A, LAGEOS (LAGEOS-1 and LAGEOS-2), Swarm-C and Swarm-B solutions.
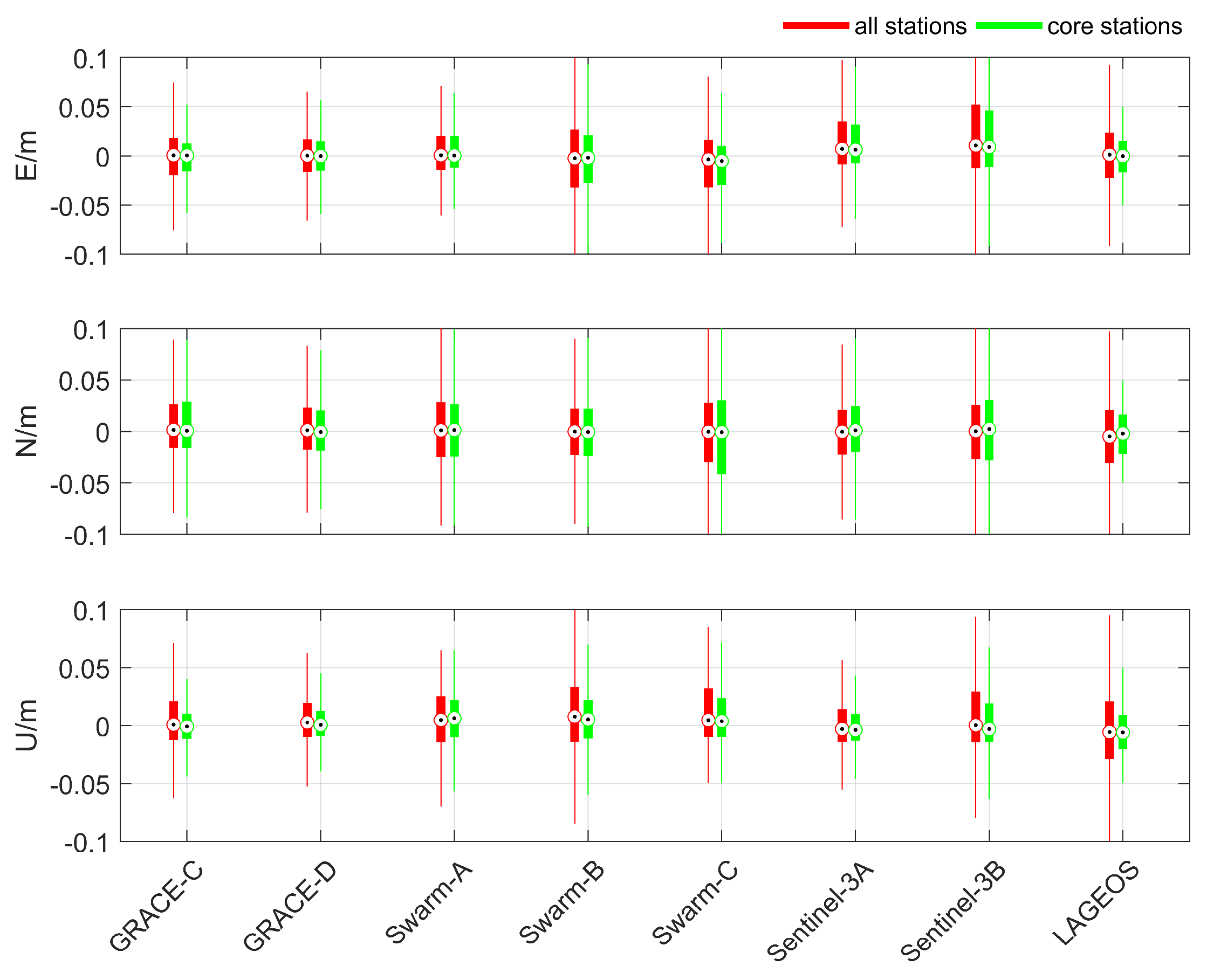
Figure 5.
Differences of all SLR station and core station coordinates w.r.t. SLRF2014.
Figure 5.
Differences of all SLR station and core station coordinates w.r.t. SLRF2014.
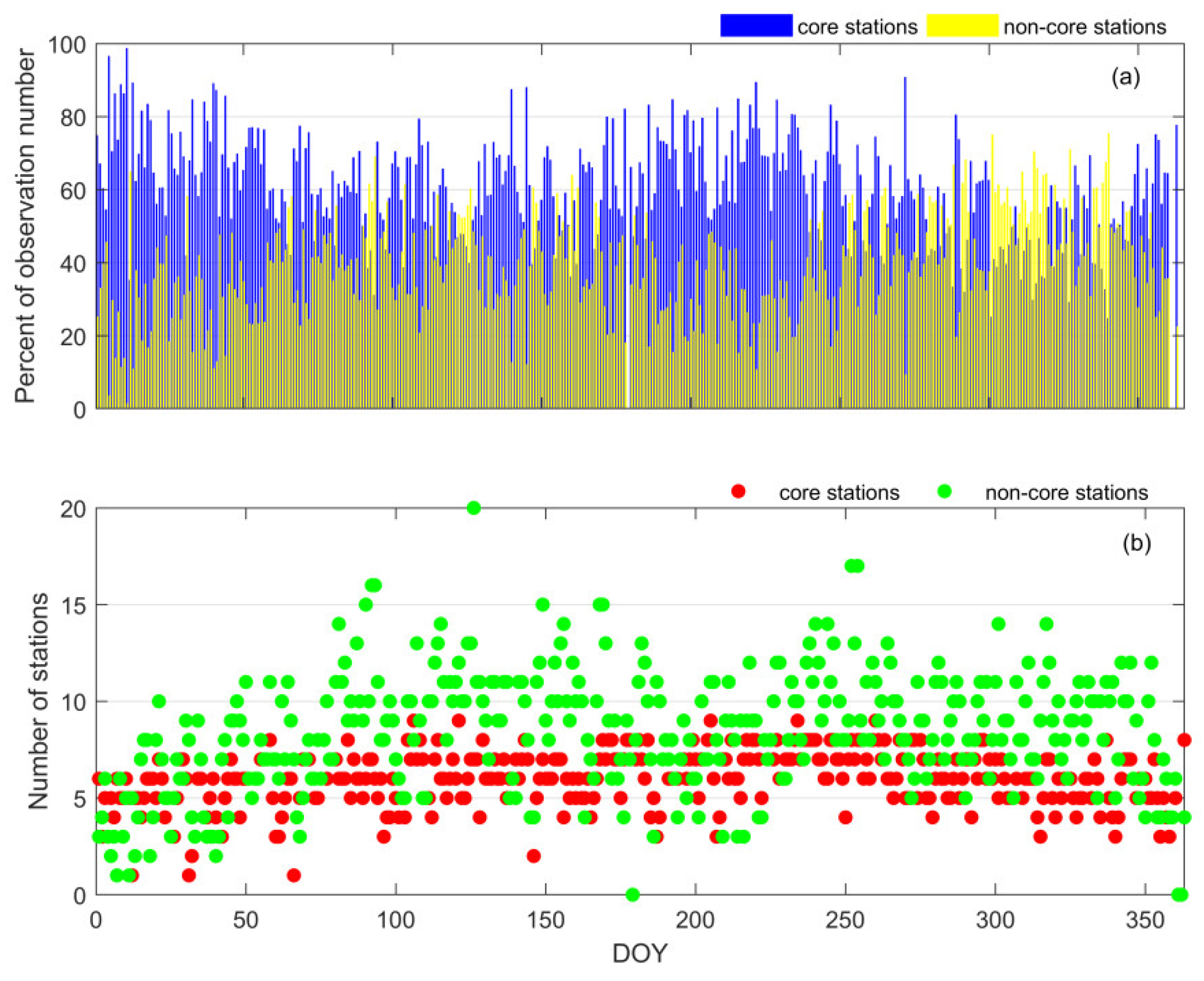
Figure 6.
(a) Percentage of observations to LAGEOS satellites from core stations and non-core stations; (b) number of core stations and non-core stations in 3-day solutions.
Figure 6.
(a) Percentage of observations to LAGEOS satellites from core stations and non-core stations; (b) number of core stations and non-core stations in 3-day solutions.
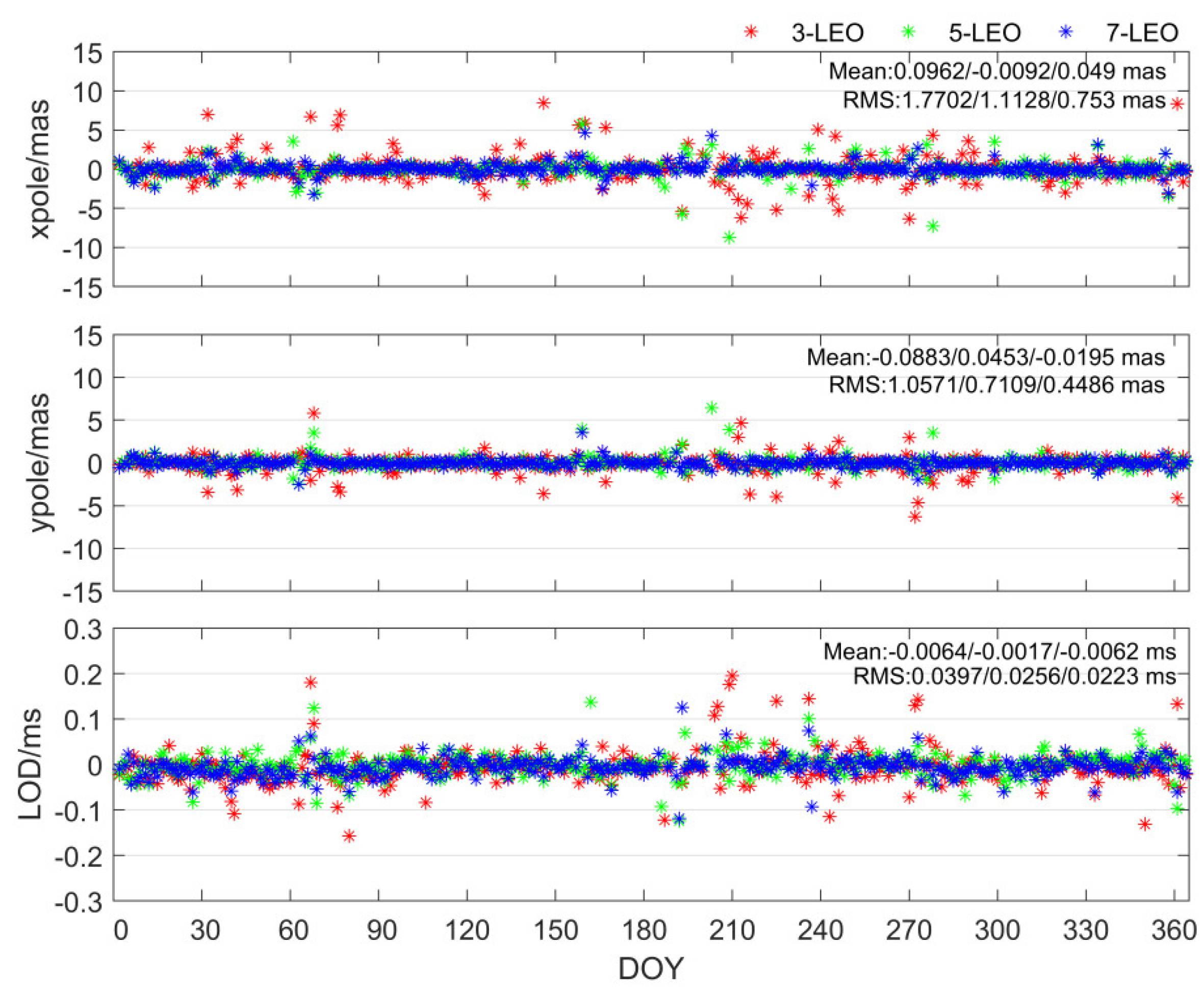
Figure 7.
Time series of pole coordinates and the length-of-day differences with respect to finals2000A.data series for the 3-LEO, 5-LEO and 7-LEO solutions. Values in the top right corner indicate the mean and RMS of differences for these three schemes.
Figure 7.
Time series of pole coordinates and the length-of-day differences with respect to finals2000A.data series for the 3-LEO, 5-LEO and 7-LEO solutions. Values in the top right corner indicate the mean and RMS of differences for these three schemes.
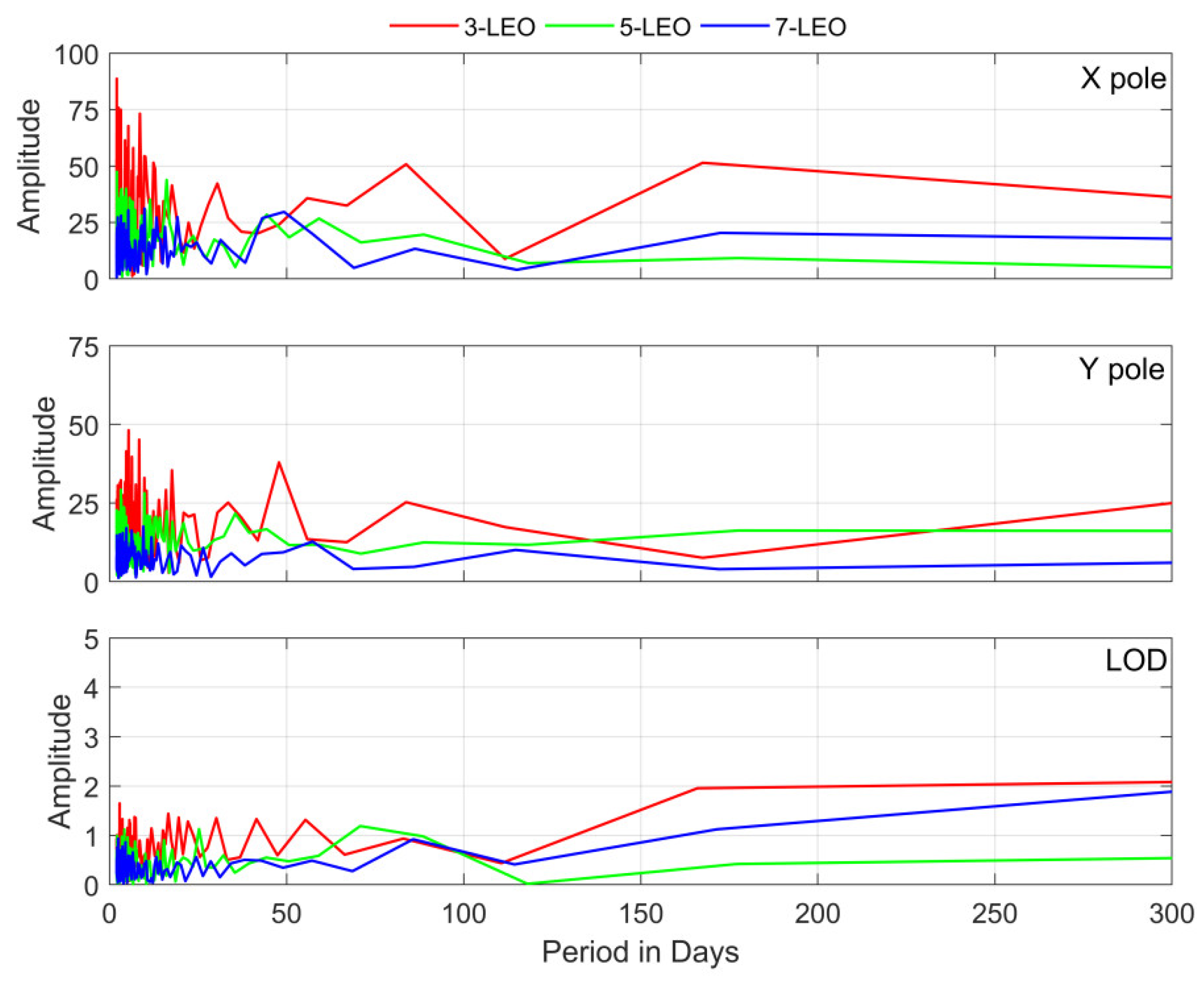
Figure 8.
Spectral analysis for the 3-LEO, 5-LEO and 7-LEO solutions.
Figure 8.
Spectral analysis for the 3-LEO, 5-LEO and 7-LEO solutions.
Figure 9.
Differences in all estimated SLR station coordinates w.r.t. SLRF2014 for the 3-LEO, 5-LEO and 7-LEO solutions.
Figure 9.
Differences in all estimated SLR station coordinates w.r.t. SLRF2014 for the 3-LEO, 5-LEO and 7-LEO solutions.
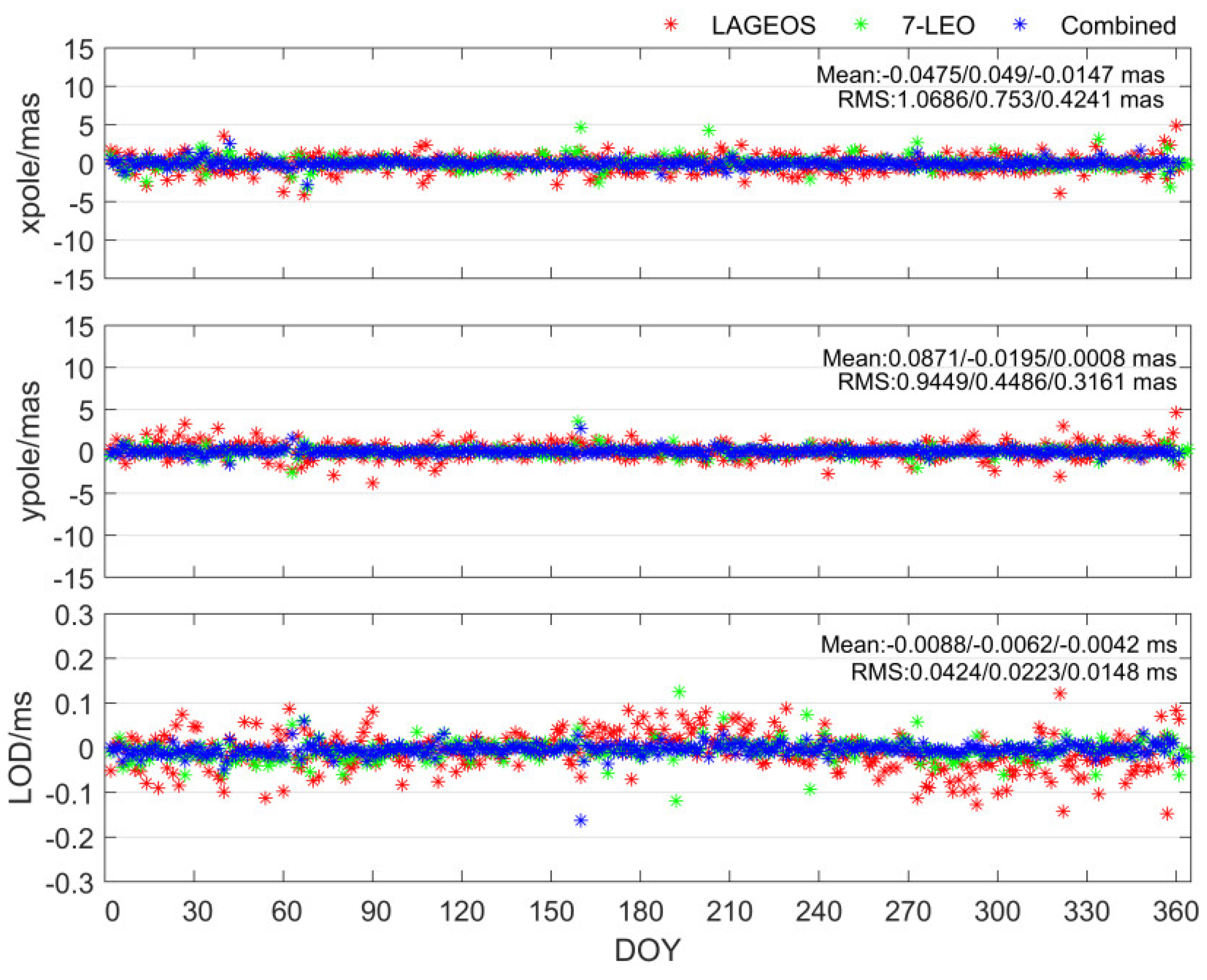
Figure 10.
Time series of pole coordinates and the length-of-day differences with respect to finals2000A.data series for the LAGEOS solution, 7-LEO solution and combined solution. Values in the top right corner indicate the mean and RMS of differences for these three schemes.
Figure 10.
Time series of pole coordinates and the length-of-day differences with respect to finals2000A.data series for the LAGEOS solution, 7-LEO solution and combined solution. Values in the top right corner indicate the mean and RMS of differences for these three schemes.
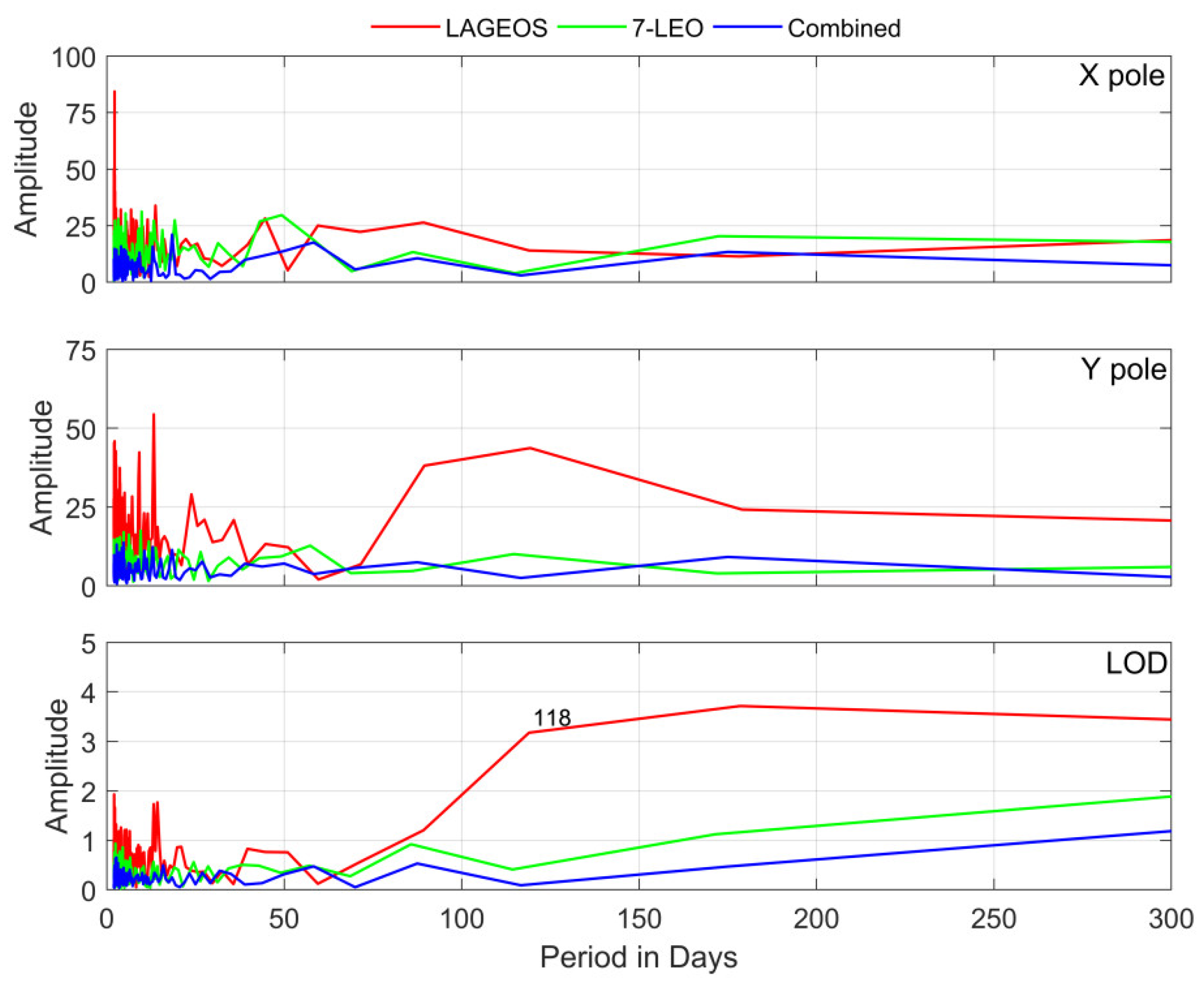
Figure 11.
Spectral analysis for the LAGEOS solution, the 7-LEO solution and the combined solution.
Figure 11.
Spectral analysis for the LAGEOS solution, the 7-LEO solution and the combined solution.
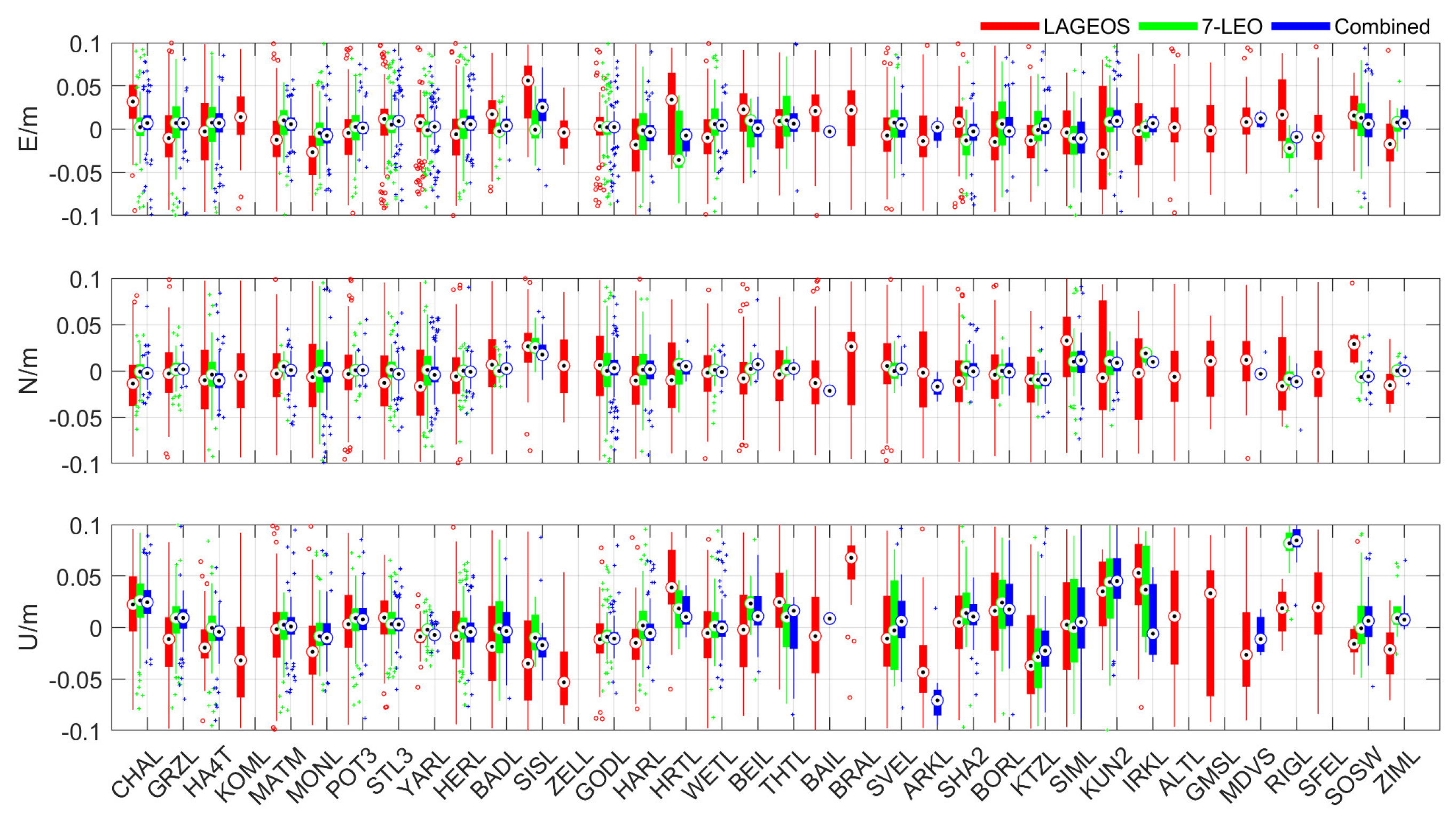
Figure 12.
Differences in all estimated SLR station coordinates w.r.t. SLRF2014 for the LAGEOS solution, the 7-LEO solution and the combined solution.
Figure 12.
Differences in all estimated SLR station coordinates w.r.t. SLRF2014 for the LAGEOS solution, the 7-LEO solution and the combined solution.
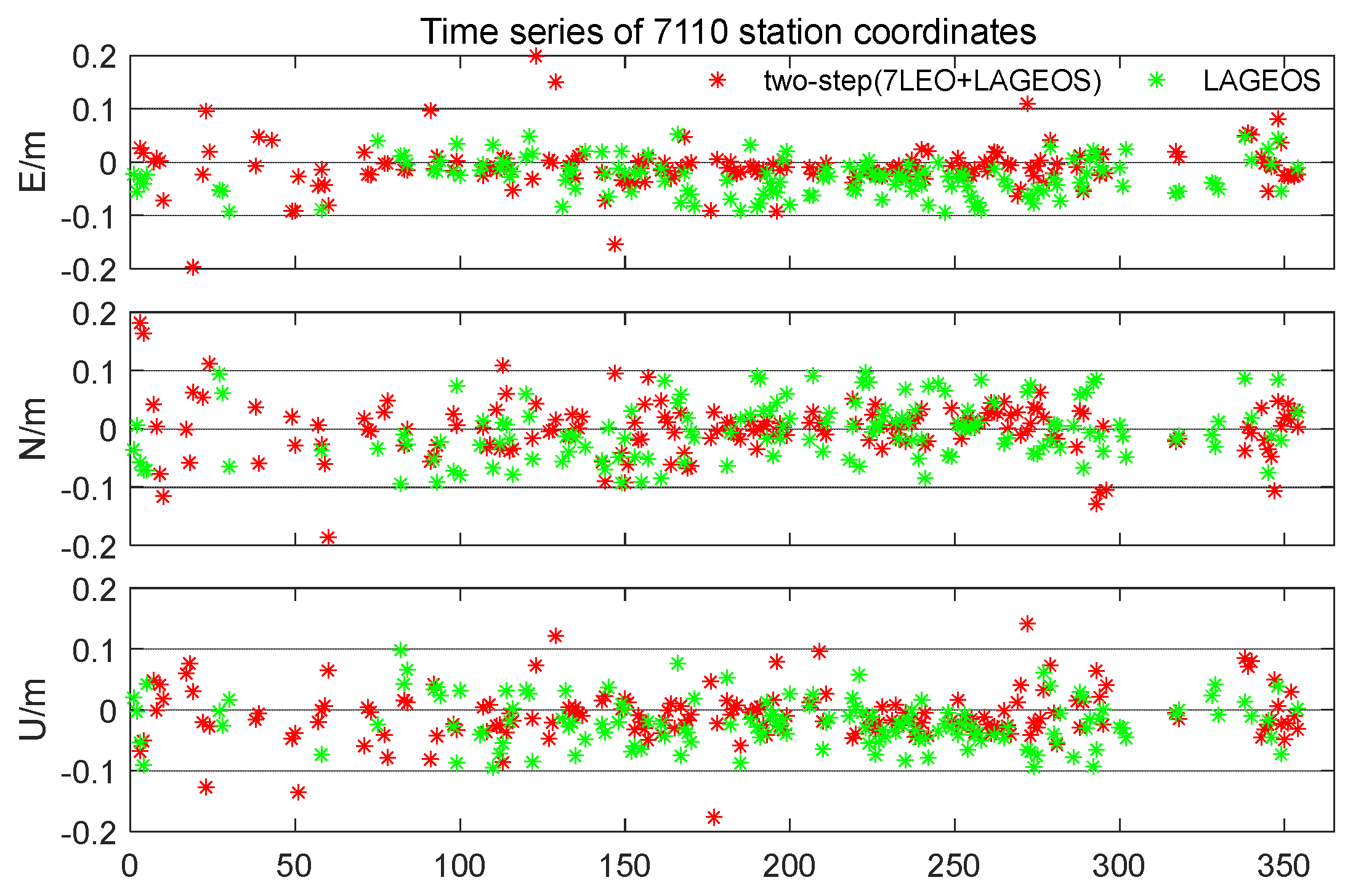
Figure 13.
Time series of station coordinate of a station in Monument Peak (7110) from LAGEOS solutions and the combination solutions.
Figure 13.
Time series of station coordinate of a station in Monument Peak (7110) from LAGEOS solutions and the combination solutions.
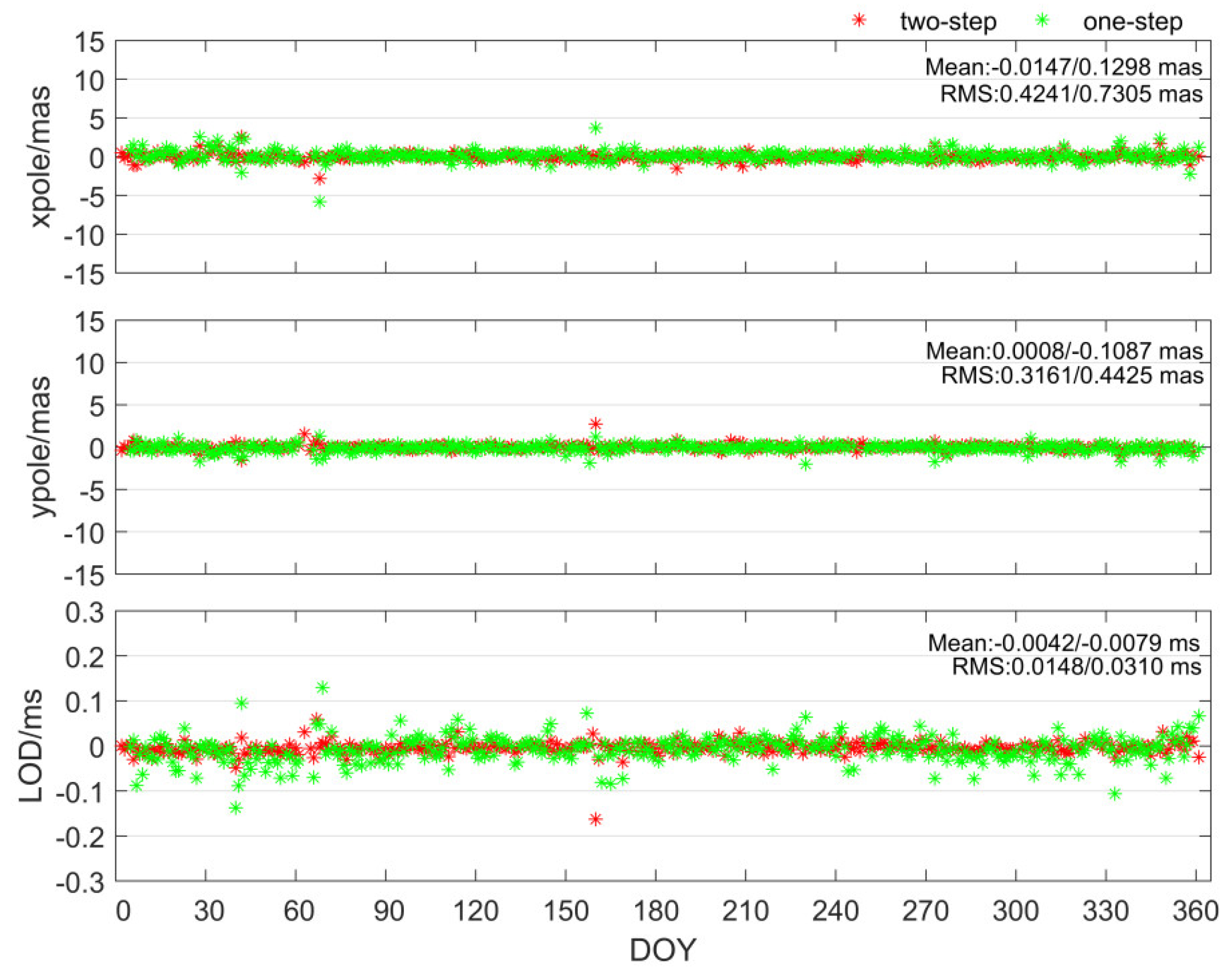
Figure 14.
Time series of pole coordinates and the length-of-day differences with respect to finals2000A.data series for the two-step solution and one-step solution. Values in the top right corner indicate the mean and RMS of differences for these two methods.
Figure 14.
Time series of pole coordinates and the length-of-day differences with respect to finals2000A.data series for the two-step solution and one-step solution. Values in the top right corner indicate the mean and RMS of differences for these two methods.
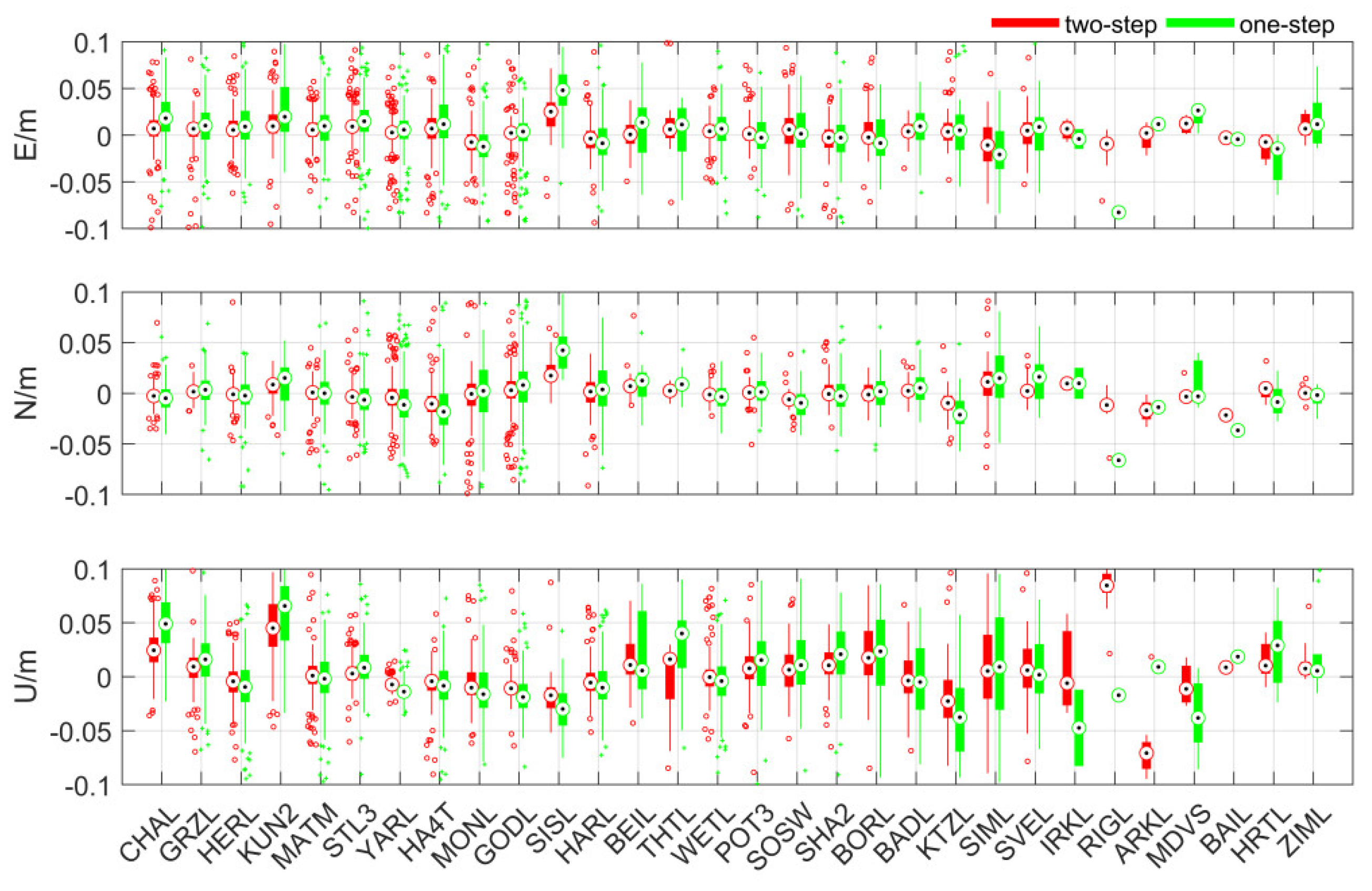
Figure 15.
Differences in all estimated SLR station coordinates w.r.t. SLRF2014 for the two-step solution and one-step solution.
Figure 15.
Differences in all estimated SLR station coordinates w.r.t. SLRF2014 for the two-step solution and one-step solution.
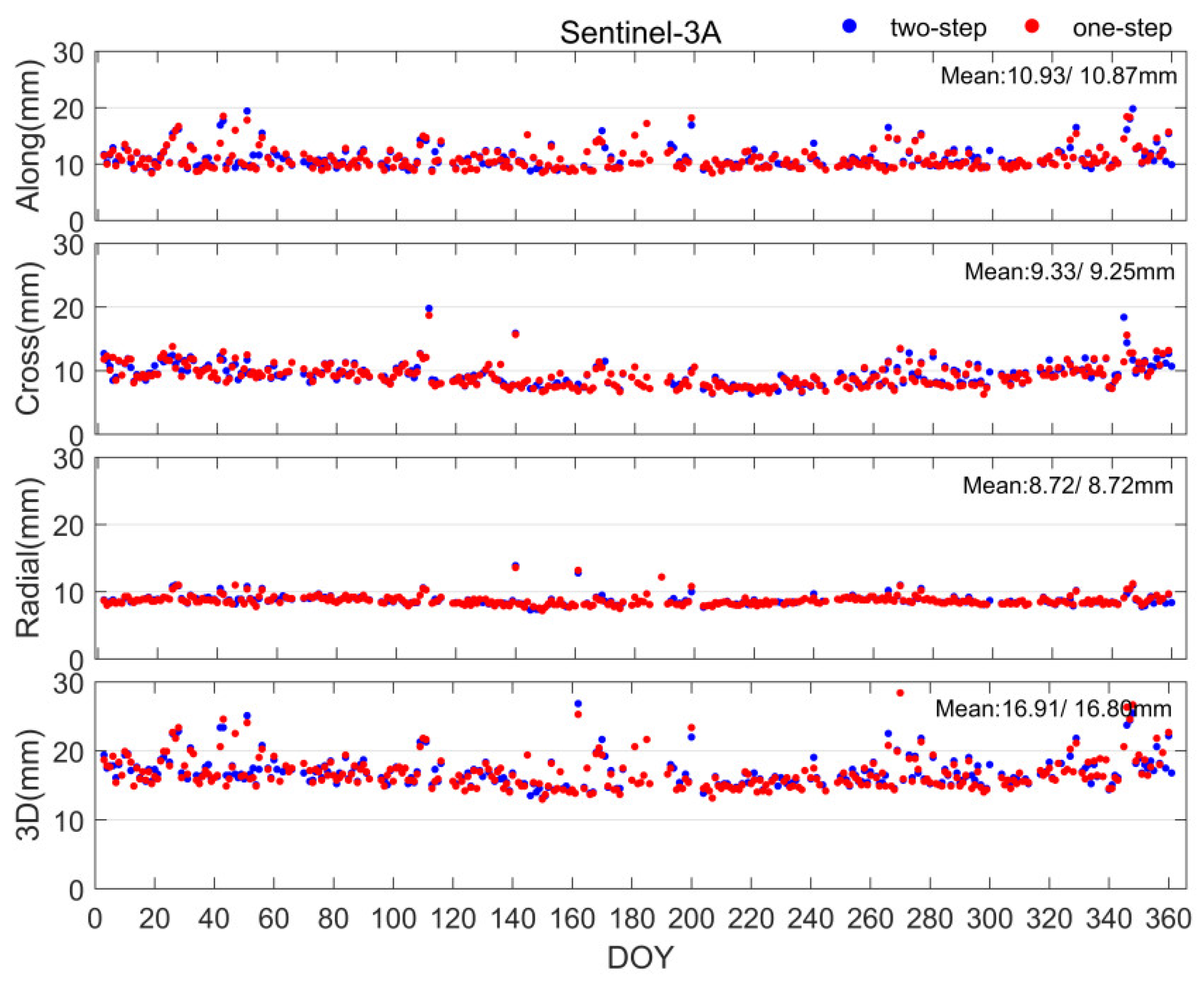
Figure 16.
Average RMS of Sentinel-3A orbit difference with respect to the CNES product for the two-step solution and one-step solution. Values in the top right corner indicate the mean of RMS for the whole processing period.
Figure 16.
Average RMS of Sentinel-3A orbit difference with respect to the CNES product for the two-step solution and one-step solution. Values in the top right corner indicate the mean of RMS for the whole processing period.
Table 1.
Overview of LEO mission used in this study.
Table 1.
Overview of LEO mission used in this study.
| Satellite | Perigee Altitude/km | Inclination/deg | LRR | GPS Receiver |
|---|
| Sentinel-3A | 814 | 98.65 | 7-prism | RUAG |
| Sentinel-3B | 814 | 98.65 | 7-prism | RUAG |
| Swarm-A | 462 | 87.35 | 4-prism | RUAG |
| Swarm-B | 511 | 87.35 | 4-prism | RUAG |
| Swarm-C | 462 | 87.35 | 4-prism | RUAG |
| GRACE-C | 500 | 89.00 | 4-prism | TriG |
| GRACE-D | 500 | 89.00 | 4-prism | TriG |
| LAGEOS-1 | 5860 | 109.90 | 426 corner cubes | ---- |
| LAGEOS-2 | 5620 | 52.67 | 426 corner cubes | ---- |
Table 2.
Force model for the POD of LEO satellites.
Table 2.
Force model for the POD of LEO satellites.
| Dynamics Model |
| Earth gravity | EGM08 (120 × 120) |
| N-body | JPL DE405 [26] |
| Ocean tide | FES 2004 (30 × 30) [27] |
| Relativity | IERS 2010 [28] |
| Solid tide and pole tide | IERS 2010 |
| Earth radiation pressure | Not considered |
| Solar radiation pressure | Box-wing model for LEO satellites [29] |
| Atmospheric density | NRLMSISE00 [30] |
| Estimated Parameters |
| Satellite initial state | Position and velocity at initial epoch |
| Atmospheric drag | GRACE-FO and Swarm: one constant scale parameter per 90 min
Sentinel-3: one constant scale parameter per 100 min |
| Empirical accelerations | GRACE-FO and Swarm: piecewise periodic accelerations in cross-track and along-track directions per 90 min
Sentinel-3: piecewise periodic accelerations in cross-track and along-track directions per 100 min |
| Receiver clock error | Each epoch as white noise |
Table 3.
Parameter estimated related with SLR observations for LAGEOS and LEO satellites in two-step method.
Table 3.
Parameter estimated related with SLR observations for LAGEOS and LEO satellites in two-step method.
| Parameter | LAGEOS-1/2 | LEO |
|---|
| SLR station coordinate | One set for three-day arc | One set for three-day arc |
| Range bias | Estimated for selected sites | Estimated for all sites |
| Earth rotation parameters | PWL daily | PWL daily |
| Satellite orbits | | |
| Satellite initial state | Position and velocity at initial epoch | --- |
| Atmospheric drag | One constant scale parameter the whole arc | --- |
| Empirical accelerations | One constant and two periodic accelerations in the cross-track and along-track directions | --- |
Table 4.
Average RMS of orbit difference with respect to the external orbit products of seven LEO satellites (GRACE-C/D, Swarm-A/B/C, Sentinel-3A/B).
Table 4.
Average RMS of orbit difference with respect to the external orbit products of seven LEO satellites (GRACE-C/D, Swarm-A/B/C, Sentinel-3A/B).
| Satellite | Orbit Type | Along (mm) | Cross (mm) | Radial (mm) | Product Source | Solution Type |
|---|
| GRACE-C | Ambiguity-float | 12.4 | 9.9 | 8.0 | National Aeronautics and Space Administration (NASA) JPL [39] | Ambiguity-fixed orbit |
| Ambiguity-fixed | 7.3 | 8.6 | 6.6 |
| GRACE-D | Ambiguity-float | 13.4 | 10.5 | 7.4 |
| Ambiguity-fixed | 8.2 | 9.2 | 5.9 |
| Swarm-A | Ambiguity-float | 15.3 | 14.3 | 7.1 | European Space Agency (ESA) [40] | Ambiguity-float orbit |
| Ambiguity-fixed | 11.5 | 13.3 | 6.0 |
| Swarm-B | Ambiguity-float | 16.2 | 14.7 | 7.4 |
| Ambiguity-fixed | 12.6 | 13.4 | 6.0 |
| Swarm-C | Ambiguity-float | 15.9 | 14.7 | 7.3 |
| Ambiguity-fixed | 12.0 | 13.8 | 6.0 |
| Sentinel-3A | Ambiguity-float | 13.7 | 8.8 | 9.6 | CNES [25] | Ambiguity-fixed orbit |
| Ambiguity-fixed | 10.9 | 9.3 | 8.7 |
| Sentinel-3B | Ambiguity-float | 15.2 | 9.3 | 10.3 |
| Ambiguity-fixed | 12.1 | 9.6 | 9.1 |
Table 5.
Mean bias and STD of SLR residuals for the ambiguity-float solutions and ambiguity-fixed solutions.
Table 5.
Mean bias and STD of SLR residuals for the ambiguity-float solutions and ambiguity-fixed solutions.
| Satellite | SLR Residuals (mm) |
|---|
| Ambiguity-Float | Ambiguity-Fixed |
|---|
| Mean | STD | Mean | STD |
|---|
| GRACE-C | 2.2 | 14.6 | 1.3 | 11.8 |
| GRACE-D | 3.0 | 15.9 | 3.2 | 12.8 |
| Swarm-A | −0.4 | 20.9 | 0.5 | 19.5 |
| Swarm-B | 1.0 | 21.7 | 1.2 | 20.5 |
| Swarm-C | 1.0 | 21.5 | 1.0 | 20.1 |
| Sentinel-3A | 1.2 | 18.0 | 1.5 | 16.9 |
| Sentinel-3B | 2.6 | 20.4 | 2.2 | 19.1 |
Table 6.
Coordinate differences of SLR stations w.r.t. SLRF2014 for the GRACE-D solutions based on the ambiguity-float orbit and ambiguity-fixed orbit.
Table 6.
Coordinate differences of SLR stations w.r.t. SLRF2014 for the GRACE-D solutions based on the ambiguity-float orbit and ambiguity-fixed orbit.
| Station | Orbit Type | E (mm) | N (mm) | U (mm) |
|---|
| Median | IQR | Median | IQR | Median | IQR |
|---|
| All stations | Ambiguity-float | 1.4 | 20.2 | 0.0 | 23.9 | 1.6 | 16.9 |
| Ambiguity-fixed | −0.2 | 16.6 | 1.0 | 20.5 | 2.6 | 14.7 |
| Core stations | Ambiguity-float | 1.2 | 17.7 | −3.2 | 23.0 | −0.6 | 12.5 |
| Ambiguity-fixed | −0.1 | 14.9 | −0.6 | 19.6 | −0.5 | 10.8 |
Table 7.
Mean biases and RMS values of pole coordinates and the length-of-day in seven single-LEO satellite solutions and LAGEOS satellite solution w.r.t the finals2000A.data series.
Table 7.
Mean biases and RMS values of pole coordinates and the length-of-day in seven single-LEO satellite solutions and LAGEOS satellite solution w.r.t the finals2000A.data series.
| Satellite | X Pole (ms) | Y Pole (ms) | LOD (ms) |
|---|
| Mean | RMS | Mean | RMS | Mean | RMS |
|---|
| GRACE-C | −0.1694 | 2.0062 | 0.0043 | 1.8425 | −0.0050 | 0.0650 |
| GRACE-D | −0.0622 | 2.3469 | 0.1280 | 1.8840 | 0.0018 | 00579 |
| SWARM-A | −0.0343 | 2.9698 | −0.0413 | 2.1253 | −0.0048 | 0.0770 |
| SWARM-B | −0.0492 | 1.9286 | 0.0619 | 1.6634 | 0.0039 | 0.0673 |
| SWARM-C | −0.0932 | 2.8565 | −0.0519 | 1.9805 | 0.0139 | 0.0719 |
| SENTINEL-3A | 0.0636 | 2.7018 | −0.0757 | 2.1211 | −0.0178 | 0.0675 |
| SENTINEL-3B | −0.0137 | 3.1221 | −0.0012 | 2.1866 | −0.0287 | 0.0829 |
| LAGEOS | −0.0475 | 1.0686 | 0.0871 | 0.9449 | −0.0088 | 0.0424 |
Table 8.
Differences in estimated SLR station coordinates w.r.t. SLRF2014 in seven single-LEO satellite solution and LAGEOS satellite solution decomposed into E, N, U components.
Table 8.
Differences in estimated SLR station coordinates w.r.t. SLRF2014 in seven single-LEO satellite solution and LAGEOS satellite solution decomposed into E, N, U components.
| Station | Satellite | E (mm) | N (mm) | U (mm) |
|---|
| Median | IQR | Median | IQR | Median | IQR |
|---|
| All stations | GRACE-C | 0.6 | 19.0 | 1.3 | 21.2 | 0.7 | 16.8 |
| GRACE-D | −0.2 | 16.6 | 1.0 | 20.5 | 2.6 | 14.7 |
| SWARM-A | 0.6 | 17.3 | 0.9 | 26.7 | 4.8 | 19.8 |
| SWARM-B | −2.4 | 29.4 | −0.1 | 22.6 | 7.7 | 23.7 |
| SWARM-C | −3.6 | 24.0 | −0.3 | 28.9 | 4.6 | 21.1 |
| SENTINEL-3A | 7.1 | 21.8 | −0.3 | 21.8 | −3.0 | 14.1 |
| SENTINEL-3B | 10.5 | 32.4 | −0.1 | 26.5 | −0.2 | 21.8 |
| LAGEOS | 1.2 | 23.1 | −4.9 | 25.6 | −5.6 | 24.9 |
| Core stations | GRACE-C | 0.4 | 14.2 | 0.5 | 21.1 | −1.0 | 11.1 |
| GRACE-D | −0.1 | 14.9 | −0.6 | 19.6 | −0.5 | 10.8 |
| SWARM-A | −0.3 | 16.9 | −0.8 | 23.9 | 5.1 | 16.7 |
| SWARM-B | −1.5 | 24.8 | −0.8 | 22.1 | 5.0 | 16.8 |
| SWARM-C | −6.6 | 18.8 | 1.7 | 30.2 | 2.2 | 15.3 |
| SENTINEL-3A | 6.2 | 16.3 | 0.9 | 20.5 | −3.9 | 10.7 |
| SENTINEL-3B | 9.0 | 27.4 | 2.2 | 27.3 | −3.0 | 16.7 |
| LAGEOS | 0.2 | 14.4 | −1.6 | 19.0 | −4.3 | 14.5 |
Table 9.
Differences in estimated SLR station coordinates w.r.t. SLRF2014 for the 3-LEO, 5-LEO and 7-LEO solutions with core stations and non-core stations decomposed into the east, north, and up components (in mm).
Table 9.
Differences in estimated SLR station coordinates w.r.t. SLRF2014 for the 3-LEO, 5-LEO and 7-LEO solutions with core stations and non-core stations decomposed into the east, north, and up components (in mm).
| Station | Solution | E (mm) | N (mm) | U (mm) |
|---|
| Median | IQR | Median | IQR | Median | IQR |
|---|
| Core stations | 3LEO | 1.9 | 14.8 | 2.5 | 15.6 | −1.7 | 9.8 |
| 5LEO | 1.3 | 17.7 | −0.8 | 11.4 | −0.2 | 12.0 |
| 7LEO | −3.4 | 15.0 | 0.4 | 10.6 | 2.8 | 11.3 |
| Non-core stations | 3LEO | −1.5 | 22.7 | 1.3 | 18.7 | 14.3 | 30.5 |
| 5LEO | 1.5 | 23.4 | −0.6 | 15.2 | 12.1 | 24.3 |
| 7LEO | −1.1 | 19.6 | 0.2 | 13.6 | 12.9 | 25.6 |
Table 10.
Differences in estimated SLR station coordinates w.r.t. SLRF2014 for the LAGEOS solution, the 7-LEO solution and the combined solution. The statistical data are classified into all SLR stations and core stations decomposed into the east, north, and up components (in mm).
Table 10.
Differences in estimated SLR station coordinates w.r.t. SLRF2014 for the LAGEOS solution, the 7-LEO solution and the combined solution. The statistical data are classified into all SLR stations and core stations decomposed into the east, north, and up components (in mm).
| Station | Solution | E (mm) | N (mm) | U (mm) |
|---|
| Median | IQR | Median | IQR | Median | IQR |
|---|
| All stations | LAGEOS | 1.2 | 23.1 | −4.9 | 25.6 | −5.6 | 24.9 |
| 7LEO | 1.9 | 16.4 | 0.3 | 11.5 | 1.9 | 17.1 |
| 7LEO + LAGEOS | 3.9 | 9.7 | −0.9 | 7.8 | 0.1 | 13.5 |
| Core stations | LAGEOS | 0.2 | 14.4 | −1.6 | 19.0 | −4.3 | 14.5 |
| 7LEO | 3.0 | 15.0 | 0.4 | 10.6 | −0.4 | 11.3 |
| 7LEO + LAGEOS | 4.5 | 8.1 | −1.2 | 7.0 | −3.0 | 8.7 |
Table 11.
Differences in estimated SLR station coordinates w.r.t. SLRF2014 using two-step method and one-step method classified into all SLR stations and core stations (in mm).
Table 11.
Differences in estimated SLR station coordinates w.r.t. SLRF2014 using two-step method and one-step method classified into all SLR stations and core stations (in mm).
| Station | Solution | E (mm) | N (mm) | U (mm) |
|---|
| Median | IQR | Median | IQR | Median | IQR |
|---|
| All stations | Two-step | 3.9 | 9.7 | −0.9 | 7.8 | 0.1 | 13.5 |
| One-step | 0.3 | 15.9 | −0.8 | 14.4 | 1.0 | 20.1 |
| Core stations | Two-step | 4.5 | 8.1 | −1.2 | 7.0 | −3.0 | 8.7 |
| One-step | 0.8 | 12.6 | −1.9 | 12.7 | −1.6 | 11.6 |



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}