
Application of Geodetic Measuring Methods for Reliable Evaluation of Static Load Test Results of Foundation Piles



Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Site
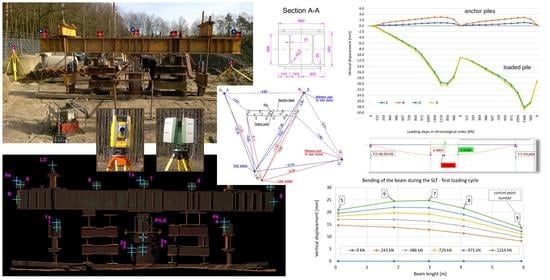
- five points (numbers 5–9) located on the reaction beam and materialized by geodetic prisms with a diameter of 62.5 mm and prism constant of −30 mm;
- two points (numbers 2 and 3) attached to the side surface of the loaded pile and materialized by geodetic prisms with a diameter of 25.4 mm and prism constant of −16.9 mm; and
- two points (numbers 1 and 4) attached to the left and right anchor piles, respectively, and materialized by geodetic prisms with a diameter of 25.4 mm and prism constant of −16.9 mm.
- three points (number 5 s, 7 s, and 9 s) located on the reaction beam and materialized by circular planar targets in blue and white colours with a diameter of 6 inches;
- two points (number 2 s and 3 s) attached to the side surface of the loaded pile and materialized by square planar targets in blue and white colours with a dimension of 3 × 3 inches; and
- two points (number 1 s and 4 s) attached to the left and right anchor piles, respectively, and materialized by square planar targets in blue and white colours with a dimension of 3 × 3 inches.
2.2. Geodetic Techniques for Displacement Control
- measurements of vertical displacements (1D) of buildings in the vicinity of deep excavations and vertical displacements of the pile and anchor piles under testing during the SLT;
- measurements of horizontal displacements (2D) of the deep excavation wall and the piles during lateral test loads;
- measurements of spatial displacements (3D) of the retaining structures and landslides; and
- measurements of deformation of engineering structures (tailing ponds, tunnels, and bridges) and the surrounding area.
2.3. Geotechnical Testing Procedure
2.4. Inverse Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- European Committee for Standardization. EN 1997-1 Eurocode 7: Geotechnical Design—Part 1: General Rules; European Committee for Standardization: Brusseles, Belgium, 2009. [Google Scholar]
- Fellenius, B.H. Basics of Foundation Design—A Textbook; Electronic. BiTech Publishers Ltd.: Richmond, BC, Canada, 2019. [Google Scholar]
- Matsumoto, T.; Matsuzawa, K.; Kitiyodom, P. A role of pile load test—Pile load test as element test for design of foundation system. In The Application of Stress-Wave Theory to Piles: Science, Technology and Practice, Proceedings of the 8th International Conference on the Application of Stress-Wave Theory to Piles, Lisbon, Portugal, 8–10 September 2008; ResearchGate: Berlin, Germany, 2008; pp. 8–10. [Google Scholar]
- Baca, M.; Muszyński, Z.; Rybak, J.; Żyrek, T. The application of geodetic methods for displacement control in the self-balanced pile capacity testing instrument. In Advances and Trends in Engineering Sciences and Technologies, Proceedings of the International Conference on Engineering Sciences and Technologies, Tatranská Štrba, Slovakia, 27–29 May 2015; Al Ali, M., Platko, P., Eds.; Leiden/CRC Press/Balkema: Tatranská Štrba, Slovakia, 2016; pp. 15–20. [Google Scholar] [CrossRef]
- Muszyński, Z.; Rybak, J. Some remarks on geodetic survey methods application in displacement measurements and capacity testing of injected and driven piles. In Proceedings of the 14th International Multidisciplinary Scientific Geo Conference (SGEM 2014), Surveying Geology and Mining Ecology Management, Albena, Bulgaria, 17–26 June 2014; Volume 2, pp. 451–458. [Google Scholar] [CrossRef]
- Tkaczyński, G. Personal communication. 2019. [Google Scholar]
- Polish Committee for Standardization (PKN). PN-B-02482:1955. Building Foundations—Load Bearing Capacity of Piles and Pile foundations—Guideline Determination; PKN: Warsaw, Poland, 1955. (In Polish) [Google Scholar]
- Cyclone, Version 9.3.1 64-bit; Leica Geosystems AG: Heerbrugg, Switzerland, 2018.
- Shults, R. Development and research of the methods for analysis of geodetic monitoring results for the subway tunnels. In Proceedings of the 4th Joint International Symposium on Deformation Monitoring (JISDM), Athens, Greece, 15–17 May 2019. [Google Scholar]
- Muszyński, Z.; Rybak, J. Evaluation of Terrestrial Laser Scanner Accuracy in the Control of Hydrotechnical Structures. Stud. Geotech. Mech. 2017, 39, 45–57. [Google Scholar] [CrossRef] [Green Version]
- Lõhmus, H.; Ellmann, A.; Märdla, S.; Idnurm, S. Terrestrial laser scanning for the monitoring of bridge load tests–two case studies. Surv. Rev. 2018, 50, 270–284. [Google Scholar] [CrossRef]
- Caroti, G.; Piemonte, A.; Squeglia, N.; Italia, L.P.; Italia, L.P. 100 Years of Geodetic Measurements in the Piazza del Duomo (Pisa, Italy): Reference Systems, Data Comparability and Geotechnical Monitoring. In Proceedings of the 4th Joint International Symposium on Deformation Monitoring (JISDM), Athens, Greece, 15–17 May 2019. [Google Scholar]
- Gumilar, I.; Fattah, A.; Abidin, H.Z.; Sadarviana, V.; Putri, N.S.E. Kristianto Landslide monitoring using terrestrial laser scanner and robotic total station in Rancabali, West Java (Indonesia). In AIP Conference Proceedings, Proceedings of the 6th International Symposium on Earth Hazard and Disaster Mitigation (ISEDM 2016), Bandung, Indonesia, 11–12 October, 2016; American Institute of Physics Inc.: Melville, NY, USA, 2017; Volume 1857. [Google Scholar]
- Artese, S.; Perrelli, M. Monitoring a landslide with high accuracy by total station: A DTM-based model to correct for the atmospheric effects. Geoscience 2018, 8, 46. [Google Scholar] [CrossRef] [Green Version]
- Ghorbani, E.; Khodaparast, M. Geodetic Accuracy in Observational Construction of an Excavation Stabilized by Top-Down Method: A Case Study. Geotech. Geol. Eng. 2019, 37, 4759–4775. [Google Scholar] [CrossRef]
- Muszyński, Z.; Rybak, J. Horizontal Displacement Control in Course of Lateral Loading of a Pile in a Slope. Proc. IOP Conf. Ser. Mater. Sci. Eng. 2017, 245, 032002. [Google Scholar] [CrossRef]
- Ehrhart, M.; Lienhart, W. Monitoring of Civil Engineering Structures using a State-of-the-art Image Assisted Total Station. J. Appl. Geod. 2015, 9, 174–182. [Google Scholar] [CrossRef]
- Lienhart, W.; Ehrhart, M.; Grick, M. High frequent total station measurements for the monitoring of bridge vibrations. J. Appl. Geod. 2017, 11, 1–8. [Google Scholar] [CrossRef]
- Wu, Y.; Qin, Y.; Wang, Z.; Jia, L. A UAV-based visual inspection method for rail surface defects. Appl. Sci. 2018, 8, 1028. [Google Scholar] [CrossRef] [Green Version]
- Honório, L.M.; Pinto, M.F.; Hillesheim, M.J.; De Araújo, F.C.; Santos, A.B.; Soares, D. Photogrammetric Process to Monitor Stress Fields Inside Structural Systems. Sensors 2021, 21, 4023. [Google Scholar] [CrossRef] [PubMed]
- Chu, X.; Zhou, Z.; Deng, G.; Duan, X.; Jiang, X. An Overall Deformation Monitoring Method of Structure Based on Tracking Deformation Contour. Appl. Sci. 2019, 9, 4532. [Google Scholar] [CrossRef] [Green Version]
- Yu Ganshkevich, A.; Shikhov, N.S.; Stoyantsov, N.M. Estimation of deformations of steel constructions of cranes based on photogrammetry. J. Phys. Conf. Ser. 2021, 1926, 012061. [Google Scholar] [CrossRef]
- Muszyński, Z.; Rybak, J.; Kaczor, P. Accuracy Assessment of Semi-Automatic Measuring Techniques Applied to Displacement Control in Self-Balanced Pile Capacity Testing Appliance. Sensors 2018, 18, 4067. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Bureick, J.; Yang, H.; Neumann, I. TLS-based composite structure deformation analysis validated with laser tracker. Compos. Struct. 2018, 202, 60–65. [Google Scholar] [CrossRef]
- Muszyński, Z. Assessment of suitability of terrestrial laser scanning for determining displacements of cofferdam during modernization works on the Rędzin sluice. In Proceedings of the 14th International Multidisciplinary Scientific Geo Conference (SGEM 2014), Surveying Geology and Mining Ecology Management, Albena, Bulgaria, 14–22 August 2014; Volume 2, pp. 81–88. [Google Scholar] [CrossRef]
- Erol, B. Evaluation of high-precision sensors in structural monitoring. Sensors 2010, 10, 10803–10827. [Google Scholar] [CrossRef] [Green Version]
- Stenz, U.; Hartmann, J.; Paffenholz, J.A.; Neumann, I. High-precision 3D object capturing with static and kinematic terrestrial laser scanning in industrial applications-approaches of quality assessment. Remote Sens. 2020, 12, 290. [Google Scholar] [CrossRef] [Green Version]
- Barbarella, M.; Fiani, M.; Lugli, A. Landslide monitoring using multitemporal terrestrial laser scanning for ground displacement analysis. Geomat. Nat. Hazards Risk 2015, 6, 398–418. [Google Scholar] [CrossRef]
- Seo, H. Long-term Monitoring of zigzag-shaped concrete panel in retaining structure using laser scanning and analysis of influencing factors. Opt. Lasers Eng. 2021, 139, 106498. [Google Scholar] [CrossRef]
- Oskouie, P.; Becerik-Gerber, B.; Soibelman, L. Automated measurement of highway retaining wall displacements using terrestrial laser scanners. Autom. Constr. 2016, 65, 86–101. [Google Scholar] [CrossRef]
- Seo, H.J.; Zhao, Y.; Wang, J. Monitoring of Retaining Structures on an Open Excavation Site with 3D Laser Scanning. In Proceedings of the International Conference on Smart Infrastructure and Construction 2019 (ICSIC), Cambridge, UK, 8–10 July 2019; ICE Publishing: London, UK, 2019; pp. 665–672. [Google Scholar]
- Seo, H. Tilt mapping for zigzag-shaped concrete panel in retaining structure using terrestrial laser scanning. J. Civ. Struct. Heal. Monit. 2021, 11, 851–865. [Google Scholar] [CrossRef]
- Lin, Y.-J.; Habib, A.; Bullock, D.; Prezzi, M. Application of High-Resolution Terrestrial Laser Scanning to Monitor the Performance of Mechanically Stabilized Earth Walls with Precast Concrete Panels. J. Perform. Constr. Facil. 2019, 33, 04019054. [Google Scholar] [CrossRef]
- Alba, M.; Fregonese, L.; Prandi, F.; Scaioni, M.; Valgoi, P. Structural monitoring of a large dam by terrestrial laser scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 6. [Google Scholar]
- Scaioni, M.; Marsella, M.; Crosetto, M.; Tornatore, V.; Wang, J. Geodetic and Remote-Sensing Sensors for Dam Deformation Monitoring. Sensors 2018, 18, 3682. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Armesto, J.; Ordóñez, C.; Alejano, L.; Arias, P. Terrestrial laser scanning used to determine the geometry of a granite boulder for stability analysis purposes. Geomorphology 2009, 106, 271–277. [Google Scholar] [CrossRef]
- Lam, S.Y.W. Application of terrestrial laser scanning methodology in geometric tolerances analysis of tunnel structures. Tunn. Undergr. Sp. Technol. 2006, 21, 410. [Google Scholar] [CrossRef]
- Nuttens, T.; De Wulf, A.; Deruyter, G.; Stal, C.; De Backer, H.; Schotte, H. Deformation monitoring with terrestrial laser scanning: Measurement and processing optimization through experience. In Proceedings of the 12th International Multidisciplinary Scientific GeoConference and EXPO—Modern Management of Mine Producing, Geology and Environmental Protection (SGEM 2012), Albena, Bulgaria, 17–23 June 2012; pp. 707–714. [Google Scholar]
- Wang, W.; Zhao, W.; Huang, L.; Vimarlund, V.; Wang, Z. Applications of terrestrial laser scanning for tunnels: A review. J. Traffic Transp. Eng. 2014, 1, 325–337. [Google Scholar] [CrossRef] [Green Version]
- Lindenbergh, R.C.; Uchański, Ł.; Bucksch, A.; Van Gosliga, R.; Uchański, L.; Bucksch, A.; Van Gosliga, R. Structural monitoring of tunnels using terrestrial laser scanning. Reports Geod. 2009, 2, 231–239. [Google Scholar]
- Van Gosliga, R.; Lindenbergh, R.; Pfeifer, N. Deformation analysis of a bored tunnel by means of terrestrial laser scanning. In Proceedings of the ISPRS Commission V Symposium “Image Engineering and Vision Metrology”, Dresden, Germany, 25–27 September 2006; Volume XXXVI, pp. 167–172. [Google Scholar]
- Nuttens, T.; Wulf, A.D.E.; Bral, L.; Wit, B.D.E.; Carlier, L.; Ryck, M.D.E.; Stal, C.; Constales, D.; Backer, H.D.E.; Nuttens, T.; et al. High Resolution Terrestrial Laser Scanning for Tunnel Deformation Measurements. In Proceedings of the FIG Working Week 2010, Sydney, Australia, 11–16 April 2010; pp. 11–16. [Google Scholar]
- Xie, X.; Lu, X. Development of a 3D modeling algorithm for tunnel deformation monitoring based on terrestrial laser scanning. Undergr. Sp. 2017, 2, 16–29. [Google Scholar] [CrossRef]
- Jiang, Q.; Zhong, S.; Pan, P.Z.; Shi, Y.; Guo, H.; Kou, Y. Observe the temporal evolution of deep tunnel’s 3D deformation by 3D laser scanning in the Jinchuan No. 2 Mine. Tunn. Undergr. Sp. Technol. 2020, 97, 103237. [Google Scholar] [CrossRef]
- Sadowski, Ł.; Czarnecki, S.; Hoła, J. Evaluation of the height 3D roughness parameters of concrete substrate and the adhesion to epoxy resin. Int. J. Adhes. Adhes. 2016, 67, 3–13. [Google Scholar] [CrossRef]
- Hoła, J.; Sadowski, Ł.; Reiner, J.; Stankiewicz, M. Concrete surface roughness testing using nondestructive three-dimensional optical method. In Proceedings of the NDE for Safety/Defektoskopie 2012, Seč u Chrudimi, Czech Republic, 30 October–1 November 2012; pp. 101–106. [Google Scholar]
- Siewczyńska, M. Method for determining the parameters of surface roughness by usage of a 3D scanner. Arch. Civ. Mech. Eng. 2012, 12, 83–89. [Google Scholar] [CrossRef]
- Muszyński, Z.; Wyjadłowski, M. Assessment of the Shear Strength of Pile-to-Soil Interfaces Based on Pile Surface Topography Using Laser Scanning. Sensors 2019, 19, 1012. [Google Scholar] [CrossRef] [Green Version]
- Seo, H. Monitoring of CFA pile test using three dimensional laser scanning and distributed fiber optic sensors. Opt. Lasers Eng. 2020, 130, 106089. [Google Scholar] [CrossRef]
- PKN. PN-B-02482:1983. Building Foundations—Capacity of Piles and Pile Foundations; PKN: Warsaw, Poland, 1983. [Google Scholar]
- Terzaghi, K.; Peck, R.B. Soil Mechanics in Engineering Practice; John Wiley & Sons: New York, NY, USA, 1948. [Google Scholar]
- Peck, R.B. Advantages and Limitations of the Observational Method in Applied Soil Mechanics. Géotechnique 1969, 19, 171–187. [Google Scholar] [CrossRef] [Green Version]
- Machelski, C. The Use of the Collocation Algorithm for Estimating the Deformations of Soil-Shell Objects Made of Corrugated Sheets. Stud. Geotech. Mech. 2020, 42, 319–329. [Google Scholar] [CrossRef]
- Autodesk Robot Structural Analysis Professional 2022, Version 35.0.0.8241 (x64); Autodesk: San Rafael, CA, USA, 2021.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Soil | γ | φ | c |
|---|---|---|---|---|
| [kN/m3] | [deg] | [kPa] | ||
| 1 | - | 18.5 | 29.8 | 1 |
| 2 | FSa | 16.6 | 30.5 | 1 |
| 3 | MSa | 17.7 | 36.0 | 1 |
| 4 | Or | 16.7 | 18.0 | 5 |
| 5 | siCl | 19.1 | 19.2 | 16 |
| 6 | MSa | 17.7 | 34.7 | 1 |
| 7 | MSa | 17.7 | 32.7 | 1 |
| 8 | MSa | 17.7 | 36.2 | 1 |
| Number | Start Time [hh:mm] | Stop Time [hh:mm] | Pressure [bar] | Force [kN] |
|---|---|---|---|---|
| 1 | 12:43 | 12:48 | 0 | 0 |
| 2 | 12:52 | 12:56 | 50 | 121 |
| 3 | 13:01 | 13:56 | 100 | 243 |
| 4 | 13:10 | 13:15 | 150 | 364 |
| 5 | 13:19 | 13:24 | 200 | 486 |
| 6 | 13:28 | 13:33 | 250 | 607 |
| 7 | 13:37 | 13:42 | 300 | 729 |
| 8 | 13:45 | 13:50 | 350 | 850 |
| 9 | 13:53 | 13:58 | 400 | 971 |
| 10 | 14:03 | 14:08 | 450 | 1093 |
| 11 | 14:13 | 14:18 | 480 | 1166 |
| 12 | 14:22 | 14:27 | 500 | 1214 |
| 13 | 14:31 | 14:36 | 350 | 850 |
| 14 | 14:39 | 14:44 | 200 | 486 |
| 15 | 14:47 | 14:52 | 0 | 0 |
| 16 | 15:17 | 15:22 | 50 | 121 |
| 17 | 15:26 | 15:31 | 100 | 243 |
| 18 | 15:38 | 15:43 | 150 | 364 |
| 19 | 15:49 | 15:54 | 200 | 486 |
| 20 | 15:59 | 16:04 | 250 | 607 |
| 21 | 16:09 | 16:14 | 300 | 729 |
| 22 | 16:20 | 16:25 | 350 | 850 |
| 23 | 16:31 | 16:36 | 400 | 971 |
| 24 | 16:42 | 16:47 | 450 | 1093 |
| 25 | 16:55 | 17:00 | 480 | 1166 |
| 26 | 17:10 | 17:15 | 240 | 583 |
| 27 | 17:19 | 17:24 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muszyński, Z.; Rybak, J. Application of Geodetic Measuring Methods for Reliable Evaluation of Static Load Test Results of Foundation Piles. Remote Sens. 2021, 13, 3082. https://doi.org/10.3390/rs13163082
Muszyński Z, Rybak J. Application of Geodetic Measuring Methods for Reliable Evaluation of Static Load Test Results of Foundation Piles. Remote Sensing. 2021; 13(16):3082. https://doi.org/10.3390/rs13163082
Chicago/Turabian StyleMuszyński, Zbigniew, and Jarosław Rybak. 2021. "Application of Geodetic Measuring Methods for Reliable Evaluation of Static Load Test Results of Foundation Piles" Remote Sensing 13, no. 16: 3082. https://doi.org/10.3390/rs13163082
APA StyleMuszyński, Z., & Rybak, J. (2021). Application of Geodetic Measuring Methods for Reliable Evaluation of Static Load Test Results of Foundation Piles. Remote Sensing, 13(16), 3082. https://doi.org/10.3390/rs13163082