
Dual-Satellite Alternate Switching Ranging/INS Integrated Navigation Algorithm for Broadband LEO Constellation Independent of Altimeter and Continuous Observation


Abstract
:
1. Introduction
2. Algorithm Principle
2.1. Standard INS+LEO-Dual Satellite (INS+LEO 2-Satellite) Integrated Navigation Algorithm
2.2. INS+LEO2-Satellite Alternate Switching Ranging Integrated Navigation Algorithm
2.2.1. Algorithm Principle
2.2.2. Algorithm Flow
3. Analysis of Dual-Satellite Alternate Switching Ranging/INS Integrated Navigation Algorithm for Broadband LEO Constellations
3.1. State Equation
3.1.1. The State Equation of INS
3.1.2. The State Equation of GNSS
3.2. Observation Equation
3.3. Error and Noise Model
3.3.1. GNSS Environmental Error Model
- (1)
- Ionospheric and tropospheric error models
- (2)
- Multipath and NLOS error model
3.3.2. Noise Model
3.3.3. Error model of Inertial Navigation System
- (1)
- Gyro error model
- (2)
- Accelerometer error model
4. Simulation Analysis
4.1. Parameter Settings
- (1)
- Parameters of SpaceX LEO Constellation System
- (2)
- IMU model parameters
- (3)
- Environmental interference parameter setting
4.2. Simulation and Result Analysis
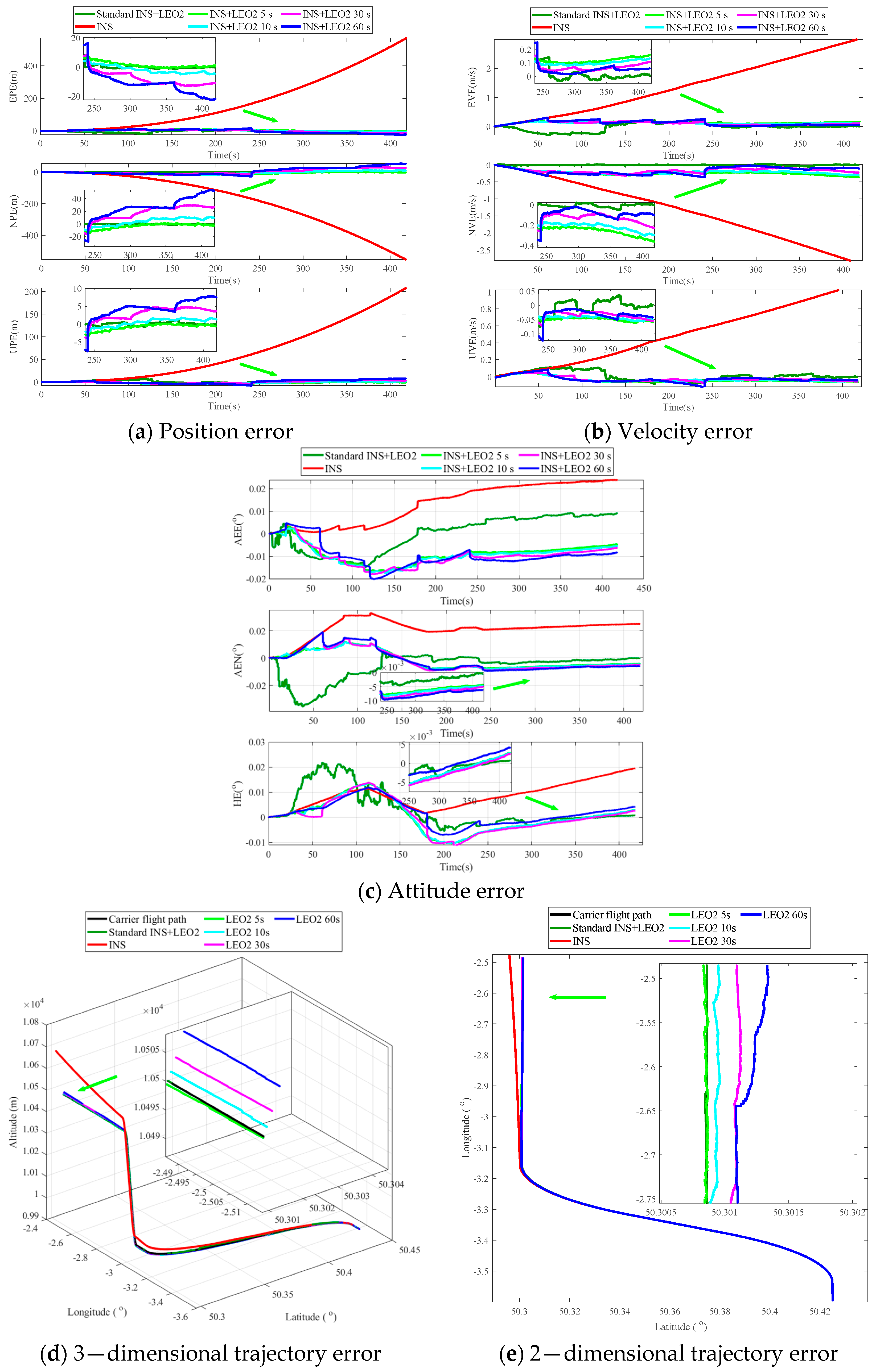
4.2.1. Standard INS+LEO2-Satellite Integrated Navigation Algorithm
4.2.2. INS+LEO2-Satellite Alternate Switching Ranging Integrated Navigation Algorithm
- (1)
- Same orbits surface
- (2)
- Adjacent orbits surface
4.3. Algorithm Comparison
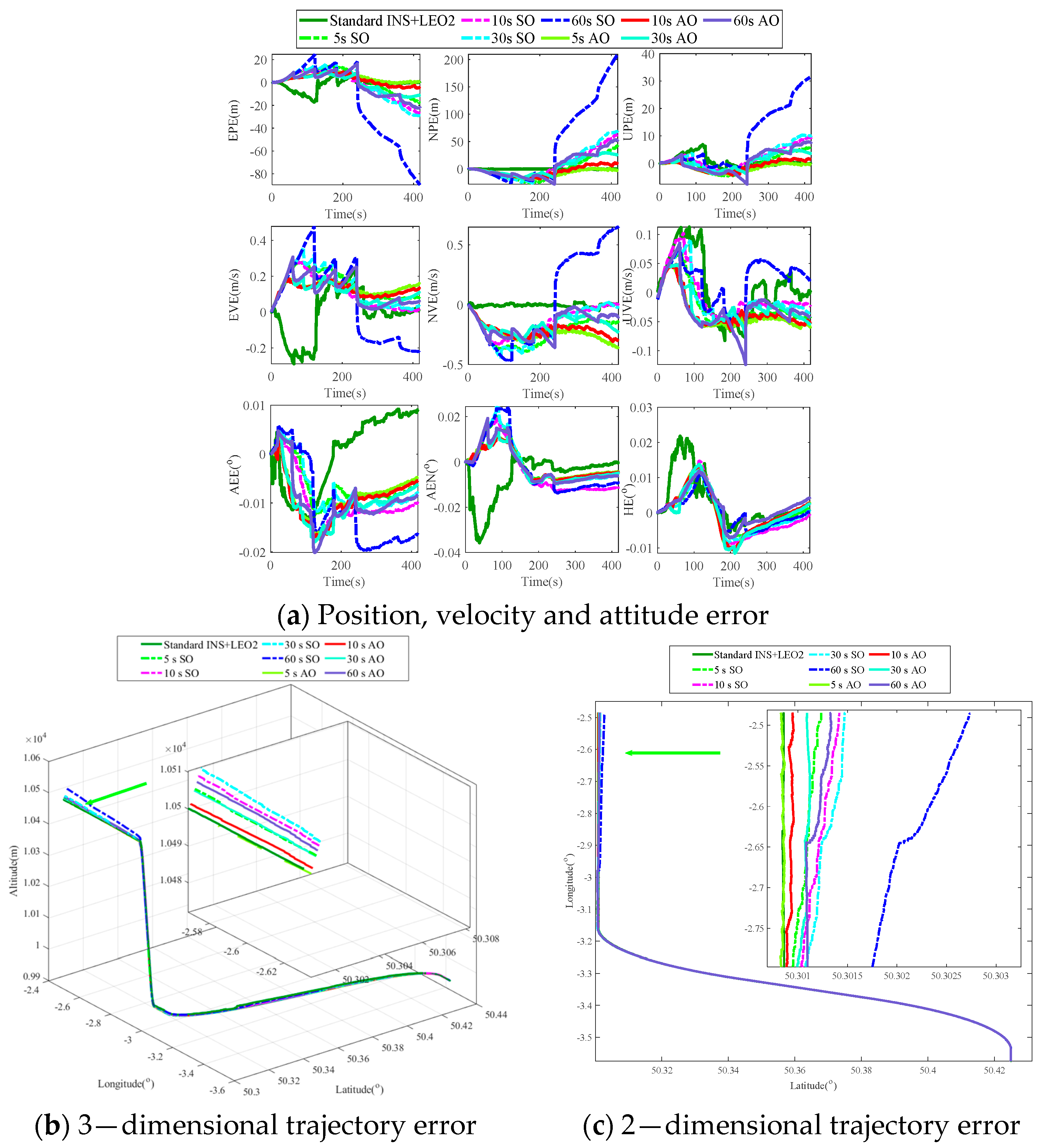
4.3.1. Comparison of INS+LEO2-Satellite Alternate Switching Ranging Algorithm Navigation and Positioning in the Same Orbit and Adjacent Orbits
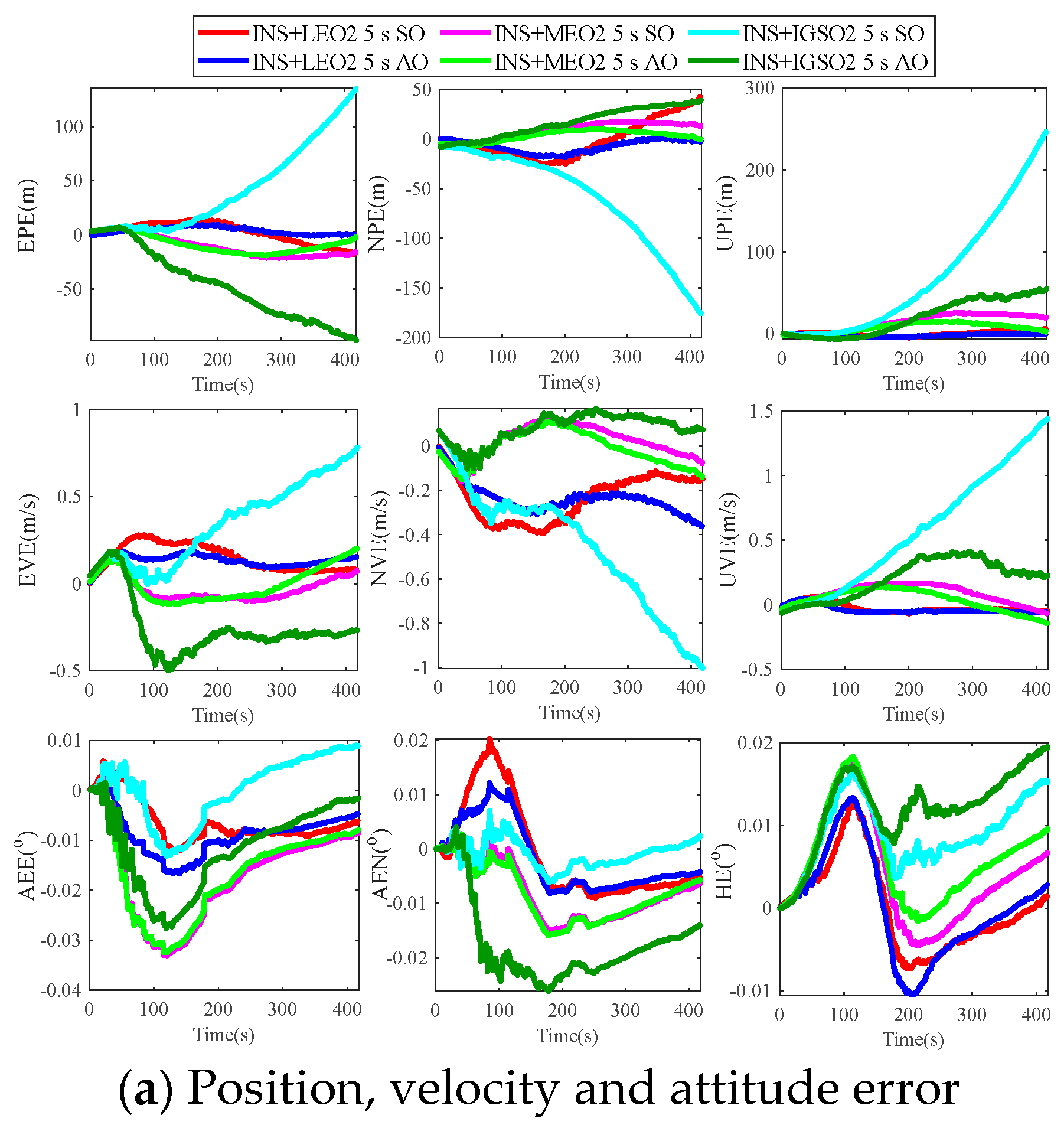
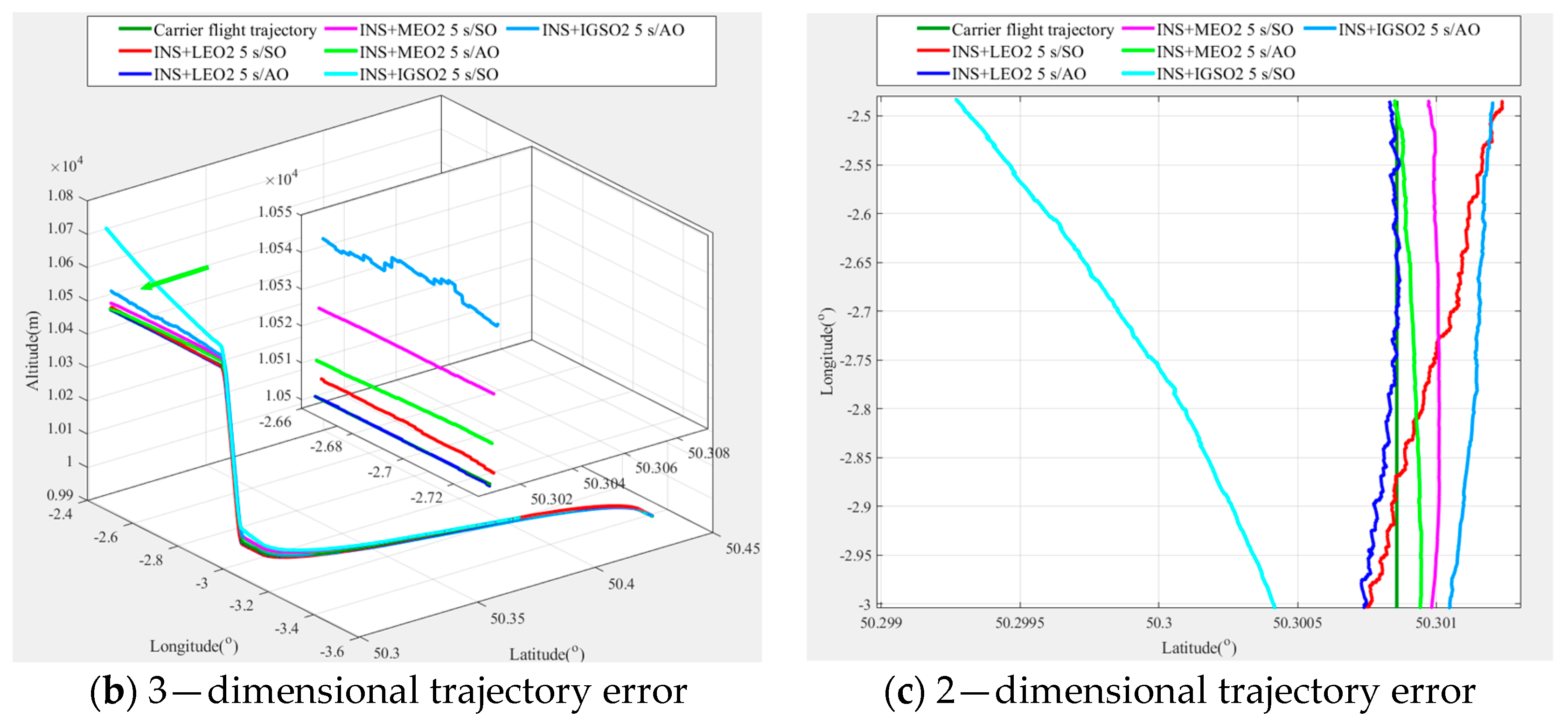
4.3.2. Comparison of Integrated Navigation and Positioning Algorithm with MEO and IGSO Constellation
5. Robustness Analysis
5.1. Analysis of Positioning Error under Different MSR
5.2. Analysis of Navigation and Positioning Errors under Different Noise Intensities
5.3. Comparisons with Other Algorithms
6. Discussion, Conclusions and Future Work
6.1. Discussion
- (1)
- When the LEO constellation is applied to TCN technology, switching is inevitable, but a certain anti-interference ability can be obtained through switching, and at the same time, it can provide optimization space for bandwidth resources, which can save bandwidth overhead to a certain extent.
- (2)
- As the switching time increases, the error of the algorithm also increases, therefore, in the design of engineering application, we should set the switching time according to the actual needs. The shorter the switching time, the better the algorithm performance, but frequent switching will increase the processing pressure and power consumption of the integrated system, while with a longer switching time, the algorithm performance is relatively poor, though it can take into account the development of other services, such as communications services.
- (3)
- The switching algorithm based on adjacent orbits is better than the algorithm based on the same orbit, therefore, in actual of engineering applications, satellites in adjacent orbits should be selected as much as possible to increase the geometric characteristics of the satellites and help improve positioning accuracy.
- (4)
- Compared with the high-orbit constellations such as MEO and IGSO, the performance of the alternate switching algorithm based on the LEO constellation is higher, and as the LEO satellites are essentially communication satellites which can eliminate the clock difference between the satellite and the user terminal through the FD system, they are therefore more suitable for ICN design.
- (5)
- Since LEO satellites are closer to the earth, the relative path loss is less and the signal propagation time delay is shorter. Multipath signal interference is therefore relatively weaker, and the signal interference from noise will be relatively reduced. Compared with the traditional MEO constellation and IGSO constellation algorithms, the switching algorithm based on the LEO constellation therefore has better anti-jamming performance and stronger algorithm robustness, and is more suitable for location service solutions in harsh and challenging environments.
- (6)
- From the experimental results, we also found that the impact of multipath and NLOS on navigation and positioning performance is more serious than noise interference, therefore, in actual engineering, more energy should be expended on the suppression of multipath and NLOS interference.
6.2. Conclusion and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, Y.; Tao, A.; Jan, S. Combined Algorithm for Satellite Selection for Open-sky and Constrained Environments. In Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 3680–3693. [Google Scholar]
- Qu, Y. Research on deep-integrated technology of satellite and inertial navigation. In Proceedings of the Seventh International Conference on Information Science & Technology, Da Nang, Vietnam, 16–19 April 2017; pp. 422–428. [Google Scholar]
- Morales-Ferre, R.; Lohan, E.S.; Falco, G.; Falletti, E. GDOP-based analysis of suitability of LEO constellations for future satel-lite-based positioning. In Proceedings of the 2020 IEEE International Conference on Wireless for Space and Extreme Environments (WiSEE), Vicenza, Italy, 12–14 October 2020; pp. 1–6. [Google Scholar]
- Ruggieri, M. Satellite Navigation and Communications: An Integrated Vision. Wirel. Pers. Commun. 2006, 37, 261–269. [Google Scholar] [CrossRef]
- Ruggieri, M. Next Generation of Wired and Wireless Networks: The NavCom Integration. In Proceedings of the 7th Strategic Workshop—Future Convergence of Wired and Wireless Network, Nibe, Denmark, 16–18 September 2005; pp. 79–88. [Google Scholar]
- Xia, J.; Deng, Z.; Gao, L. The Research on Integrated Communication Networks and Satellite Navigation Positioning Tech-nology. In Proceedings of the International Conference on Computer Sciences & Automation Engineering, Sanya, China, 14–15 November 2015; pp. 69–73. [Google Scholar]
- Qiao, Y.; Zhao, Y.; Zhao, J. Feasible Analysis of the Combination of Inertia Navigation. Aerospace Shanghai 2003, 4, 34–37. [Google Scholar]
- Luo, J.; Yuan, J. Integrated scheme analysis and performance evaluation of INS/Twin-Star integrated navigation System. GNSS World China 2005, 2, 41–46. [Google Scholar]
- Yen, S.-W.; van Graas, F.; de Haag, M.U. Positioning with two satellites and known receiver clock, barometric pressure and radar elevation. GPS Solut. 2016, 20, 885–899. [Google Scholar] [CrossRef]
- Wang, X.; Zhong, X.; Kou, J. Study on Method of MEMS-INS/GPS Double Star Integrated Positioning. Modern Navig. 2015, 6, 487–491. [Google Scholar]
- Gai, E. The century of inertial navigation technology. In Proceedings of the 2000 IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 18–25 March 2000; pp. 59–60. [Google Scholar]
- Lin, X. A Position Solution Method for Double-Star Position System. Geomat. Inf. Sci. Wuhan Univ. 2009, 34, 564–567. [Google Scholar]
- Sun, G.; Shen, S.; Ding, Z.M.; Zheng, Y.G.; Li, R. An Integration Method for Passive RDSS and DNS. Acta Aeronaut. Astronaut. Sin. 2006, 27, 682–686. [Google Scholar]
- Li, Z.; Zhang, H.; Wang, W. A positioning method with two satellites by relative position constraint. Acta Aeronaut. Astronaut. Sin. 2017, 38, 171–185. [Google Scholar]
- Hatano, H.; Kitani, T.; Fujii, M.; Ito, A.; Watanabe, Y.; Onishi, H.; Aoki, T. Positioning Method by Two GNSS Satellites and Distance Sensor in Urban Area. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2015, 98, 275–283. [Google Scholar] [CrossRef]
- Kubrak, D.; Macabiau, C.; Monnerat, M.; Boucheret, M.L. Vehicular navigation using a tight integration of aided-GPS and low-cost MEMS sensors. ION NTM 2006. In Proceedings of the National Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 18–20 January 2006; pp. 149–158. [Google Scholar]
- Zhou, Q.; Zhang, H.; Li, Y.; Li, Z. An Adaptive Low-Cost GNSS/MEMS-IMU Tightly-Coupled Integration System with Aiding Measurement in a GNSS Signal-Challenged Environment. Sensors 2015, 15, 23953–23982. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, J. Two satellites positioning algorithm based on AGPS system with two clock bias. In Proceedings of the 2010 2nd International Conference on Computer Engineering and Technology (ICCET), Chengdu, China, 16–18 April 2010; pp. V2-416–V2-419. [Google Scholar]
- Ye, L.; Yang, Y.; Jing, X.; Ma, J.; Deng, L.; Li, H. Single-Satellite Integrated Navigation Algorithm Based on Broadband LEO Constellation Communication Links. Remote Sens. 2021, 13, 703. [Google Scholar] [CrossRef]
- Pirník, R.; Hruboš, M.; Nemec, D.; Mravec, T.; Božek, P. Integration of Inertial Sensor Data into Control of the Mobile Platform. In Proceedings of the 2015 Federated Conference on Software Development and Object Technologies. SDOT 2015. Advances in Intelligent Systems and Computing; Janech, J., Kostolny, J., Gratkowski, T., Eds.; Springer: Cham, Switzerland, 2015; Volume 511, pp. 271–282. [Google Scholar] [CrossRef]
- Ibrahim, I.N.; Pavol, B.; Al Akkad, M.A.; Karam, A. Navigation control and stability investigation of a hexacopter equipped with an aerial manipulater. In Proceedings of the 2017 21st International Conference on Process Control (PC), Strbske Pleso, Slovakia, 6–9 June 2017; pp. 204–209. [Google Scholar] [CrossRef]
- Pivarčiová, E.; Božek, P.; Turygin, Y.; Zajačko, I.; Shchenyatsky, A.; Vaclav, S.; Císar, M.; Gemela, B. Analysis of control and correction options of mobile robot trajectory by an inertial navigation system. Int. J. Adv. Robot. Syst. 2018, 15, 1–15. [Google Scholar] [CrossRef]
- Qin, Y.; Zhang, H.; Wang, S. Kalman Filter and Integrated Navigation Principle, 3rd ed.; Northwestern Polytechnical University Press: Xi’an, China, 2015; ISBN 9787561243503. [Google Scholar]
- Falletti, E.; Rao, M.; Savasta, S. The Kalman Filter and Its Applications in GNSS and INS; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2011; ISBN 9781118104750. [Google Scholar]
- Wu, Y.; Hu, X.; Wu, M.; Hu, D. Strapdown inertial navigation using dual quaternion algebra: Error analysis. Aerosp. Electron. Syst. IEEE Trans. 2006, 42, 259–266. [Google Scholar]
- Wang, C.; Bo, Y.; Jiang, C. A New Efficient Filter Model for GPS/SINS Ultra-Tight Integration System. Math. Probl. Eng. 2020, 1–9. [Google Scholar] [CrossRef]
- Hu, G.; Gao, S.; Zhong, Y. A derivative UKF for tightly coupled INS/GPS integrated navigation. ISA Trans. 2015, 56, 135–144. [Google Scholar] [CrossRef] [PubMed]
- Badshah, K. Research on SINS/GPS and SINS/CNS Integrated Navigation Systems; Northwestern Polytechnical University: Xi’an, China, 2016. [Google Scholar]
- Groves, P.D. Principles of GNSS, inertial, and multisensor integrated navigation systems. Ind. Robot 2013, 67, 191–192. [Google Scholar]
- Chang, G.; Xu, T.; Yao, Y.; Wang, H.; Zeng, H. Ionospheric delay prediction based on online polynomial modeling for real-time cycle slip repair of undifferenced triple-frequency GNSS signals. Measurement 2019, 146, 289–297. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Fitchburg, MA, USA, 2008; 503p, ISBN 978-1-58053-255-6. [Google Scholar]
- Son, S.-U.; Kim, H.; Joo, J.; Choi, J.W. Multipath Effects on High-Frequency Coherent Acoustic Communications in Shallow Water. Jpn. J. Appl. Phys. 2013, 52, 07HG03. [Google Scholar] [CrossRef]
- Artyushenko, V.M.; Volovach, V.I.; Osipov, O.V. Mathematical models of probability density of signal and additive noise under influence of mul-tiplicative noise. Paдuomexнuka 2016, 12, 29–36. [Google Scholar]
- Ye, L.; Fan, Z.; Zhang, H.; Liu, Y.; Wu, W.; Hu, Y. Analysis of GNSS Signal Code Tracking Accuracy Under Gauss Interference. Comput. Sci. 2020, 47, 245–251. [Google Scholar]
- Ye, L. Simulation Generate and Performance Analyse on BDS-3 B1C Signal; University of Chinese Academy of Sciences: Beijing, China, 2019. [Google Scholar]
- Martin, R.K.; King, A.S.; Pennington, J.R.; Thomas, R.W.; Lenahan, R.; Lawyer, C. Modeling and Mitigating Noise and Nuisance Parameters in Received Signal Strength Positioning. IEEE Trans. Signal Process. 2012, 60, 5451–5463. [Google Scholar] [CrossRef]
- Reid, T.G.; Neish, A.M.; Walter, T.; Enge, P.K. Leveraging Commercial Broadband LEO Constellations for Navigation. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 2300–2314. [Google Scholar]
- Ren, C.; Huang, H.; Yang, X. The impact of altitude angle and signal strength combined model on precise point positioning. Sci. Surv. Mapp. 2016, 41, 24–27. [Google Scholar]
- Wang, W.; Zhang, H.; Wu, P. Discontinuous Pseudo Range Constrained Inertial/Double Satellites Integrated Positioning. Electron. Opt. Control 2016, 23, 6–9, 22. [Google Scholar]
- Qi, H.; Xia, S.; Chen, Y.; Dai, J. Passive Positioning Algorithm Based on Beidou Double-Star. Int. Symp. Syst. Control Aerosp. Astronaut. 2006, 26, 579–582. [Google Scholar] [CrossRef]
- Hsu, W.-H.; Jan, S.-S. Assessment of using Doppler shift of LEO satellites to aid GPS positioning. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1155–1161. [Google Scholar]
- Ning, X.; Zhang, J.; Gui, M.; Fang, J. A Fast Calibration Method of the Star Sensor Installation Error Based on Observability Analysis for the Tightly Coupled SINS/CNS-Integrated Navigation System. IEEE Sens. J. 2018, 18, 6794–6803. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbital Parameter Type | Value | Error Parameter Type | Value |
|---|---|---|---|
| Period (min) | About 120 | Number of surfaces | 32 |
| Height (km) Radius (km) Inclination (°) | 1150 7521 53 | Number of satellites per orbit Total number of satellites | 50 1600 |
| Parameter Type | Accelerometer | Gyro | Cost Level |
|---|---|---|---|
| Quantization noise (m/s2) | 1 × 10−4 | 1 × 10−4 | Low |
| Scale factor (ppm) | 100~500 | 100~500 | Low |
| Cross-coupling error (ppm) | 100~500 | 100~500 | Low |
| Orbital Parameter Type | Value | Error Parameter Type | Value |
|---|---|---|---|
| Signal spatial error (m) | 0.01 | Range rate tracking error (m/s) | 0.002 |
| Signal ionospheric delay (m) | 0.02 | Distance noise (m) | 0.5 |
| Signal tropospheric delay (m) | 0.002 | Range rate noise (m/s) | 0.05 |
| Code tracking error (m) | 0.1 | MSR | 0.55 |
| Error Index | Algorithm | Mean | Std |
|---|---|---|---|
| Longitude (°) | INS+LEO2 5 s/Same orbits surface | −1.1203 × 10−5 | 1.7047 × 10−4 |
| INS+LEO2 10 s/Same orbits surface | 6.2366 × 10−5 | 2.1058 × 10−4 | |
| INS+LEO2 30 s/Same orbits surface | −6.4679 × 10−5 | 2.5468 × 10−4 | |
| INS+LEO2 60 s/Same orbits surface | 3.9182 × 10−4 | 6.4647 × 10−4 | |
| INS | −1.5333 × 10−3 | 1.4192 × 10−3 | |
| Latitude (°) | INS+LEO2 5 s/Same orbits surface | 1.1128 × 10−5 | 1.3245 × 10−4 |
| INS+LEO2 10 s/Same orbits surface | −1.6601 × 10−5 | 1.6117 × 10−4 | |
| INS+LEO2 30 s/Same orbits surface | −2.1445 × 10−5 | 1.9511 × 10−4 | |
| INS+LEO2 60 s/Same orbits surface | −2.3428 × 10−4 | 4.7607 × 10−4 | |
| INS | 2.3666 × 10−3 | 2.2320 × 10−3 | |
| Altitude (m) | INS+LEO2 5 s/Same orbits surface | 0.1765 | 3.0525 |
| INS+LEO2 10 s/Same orbits surface | 1.8892 | 3.4736 | |
| INS+LEO2 30 s/Same orbits surface | 1.9771 | 4.2247 | |
| INS+LEO2 60 s/Same orbits surface | 8.8348 | 10.9232 | |
| INS | 78.8923 | 74.5186 |
| Error Index | Algorithm | Mean | Std |
|---|---|---|---|
| Longitude (°) | INS+LEO2 5 s/Adjacent orbits surface | −0.6539 × 10−5 | 5.6238 × 10−5 |
| INS+LEO2 10 s/Adjacent orbits surface | −0.8937 × 10−5 | 7.9074 × 10−5 | |
| INS+LEO2 30 s/Adjacent orbits surface | 2.8691 × 10−5 | 13.7119 × 10−5 | |
| INS+LEO2 60 s/Adjacent orbits surface | 5.1428 × 10−5 | 19.7866 × 10−5 | |
| Latitude (°) | INS+LEO2 5 s/Adjacent orbits surface | −0.0539 × 10−4 | 4.4523 × 10−5 |
| INS+LEO2 10 s/Adjacent orbits surface | −0.1351 × 10−4 | 6.0644 × 10−5 | |
| INS+LEO2 30 s/Adjacent orbits surface | −0.8194 × 10−4 | 10.3322 × 10−5 | |
| INS+LEO2 60 s/Adjacent orbits surface | −1.8018 × 10−4 | 14.9197 × 10−5 | |
| Altitude (m) | INS+LEO2 5 s/Adjacent orbits surface | −0.0543 | 0.5229 |
| INS+LEO2 10 s/Adjacent orbits surface | 0.4595 | 1.8593 | |
| INS+LEO2 30 s/Adjacent orbits surface | 0.8353 | 2.7946 | |
| INS+LEO2 60 s/Adjacent orbits surface | 0.8935 | 3.9934 |
| Error Index | Algorithm | Mean | Std |
|---|---|---|---|
| Longitude (°) | Algorithm [9] | / | / |
| Algorithm [10] | / | / | |
| Algorithm [12] | / | / | |
| Algorithm [16] | / | / | |
| Algorithm [17] | / | / | |
| Algorithm [39] | 1.6753 × 10−4 | 1.3200 × 10−5 | |
| Algorithm [40] | 2.4564 × 10−4 | 1.5700 × 10−2 | |
| Algorithm [41] | 8.2270 × 10−3 | 1.1150 × 10−3 | |
| Algorithm [42] | 2.7791 × 10−5 | / | |
| INS+LEO2 5 s/AO | −0.6539 × 10−5 | 5.6238 × 10−5 | |
| INS+LEO2 60 s/AO | 5.1428 × 10−5 | 19.7866 × 10−5 | |
| Latitude (°) | Algorithm [9] | / | / |
| Algorithm [10] | / | / | |
| Algorithm [12] | / | / | |
| Algorithm [16] | / | / | |
| Algorithm [17] | / | / | |
| Algorithm [39] | 1.6000 × 10−3 | 3.5382 × 10−4 | |
| Algorithm [40] | 1.7986 × 10−4 | 1.3400 × 10−2 | |
| Algorithm [41] | 1.0253 × 10−1 | 3.7700 × 10−4 | |
| Algorithm [42] | 2.0918 × 10−5 | / | |
| INS+LEO2 5 s/AO | −0.0539 × 10−4 | 4.4523 × 10−5 | |
| INS+LEO2 60 s/AO | −1.8018 × 10−4 | 14.9197 × 10−5 | |
| Altitude (m) | Algorithm [9] | / | 4.0000 |
| Algorithm [10] | / | 7.4762 | |
| Algorithm [12] | / | 9.8869 | |
| Algorithm [16] | / | 5.0000 | |
| Algorithm [17] | / | 4.3991 | |
| Algorithm [39] | 34.6000 | 6.0518 | |
| Algorithm [40] | 35.9300 | 14.1989 | |
| Algorithm [41] | −0.7636 | 15.1179 | |
| Algorithm [42] | / | / | |
| INS+LEO2 5 s/AO | −0.0543 | 0.5229 | |
| INS+LEO2 60 s/AO | 0.8935 | 3.9934 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, L.; Yang, Y.; Jing, X.; Li, H.; Yang, H.; Xia, Y. Dual-Satellite Alternate Switching Ranging/INS Integrated Navigation Algorithm for Broadband LEO Constellation Independent of Altimeter and Continuous Observation. Remote Sens. 2021, 13, 3312. https://doi.org/10.3390/rs13163312
Ye L, Yang Y, Jing X, Li H, Yang H, Xia Y. Dual-Satellite Alternate Switching Ranging/INS Integrated Navigation Algorithm for Broadband LEO Constellation Independent of Altimeter and Continuous Observation. Remote Sensing. 2021; 13(16):3312. https://doi.org/10.3390/rs13163312
Chicago/Turabian StyleYe, Lvyang, Yikang Yang, Xiaolun Jing, Hengnian Li, Haifeng Yang, and Yunxia Xia. 2021. "Dual-Satellite Alternate Switching Ranging/INS Integrated Navigation Algorithm for Broadband LEO Constellation Independent of Altimeter and Continuous Observation" Remote Sensing 13, no. 16: 3312. https://doi.org/10.3390/rs13163312
APA StyleYe, L., Yang, Y., Jing, X., Li, H., Yang, H., & Xia, Y. (2021). Dual-Satellite Alternate Switching Ranging/INS Integrated Navigation Algorithm for Broadband LEO Constellation Independent of Altimeter and Continuous Observation. Remote Sensing, 13(16), 3312. https://doi.org/10.3390/rs13163312