
Fog Measurements with IR Whole Sky Imager and Doppler Lidar, Combined with In Situ Instruments


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Instrumentation and Derived Parameters
2.1. In Situ Measurement Sensors
2.1.1. Droplets Size Distribution
2.1.2. Visibility Range and Meteorological Data
2.2. Remote Sensing Techniques
2.2.1. Thermal IR and Visible WSI
- Normalized temperature image—obtained by division of the effective temperature in each pixel within the field of view (FOV) by the closed sensor cover (hatch) temperature and additional correction by the two black bodies in the FOV in which their temperatures are measured continuously. The obtained valid values range between 0 to 1 (except for the sun and the moon).
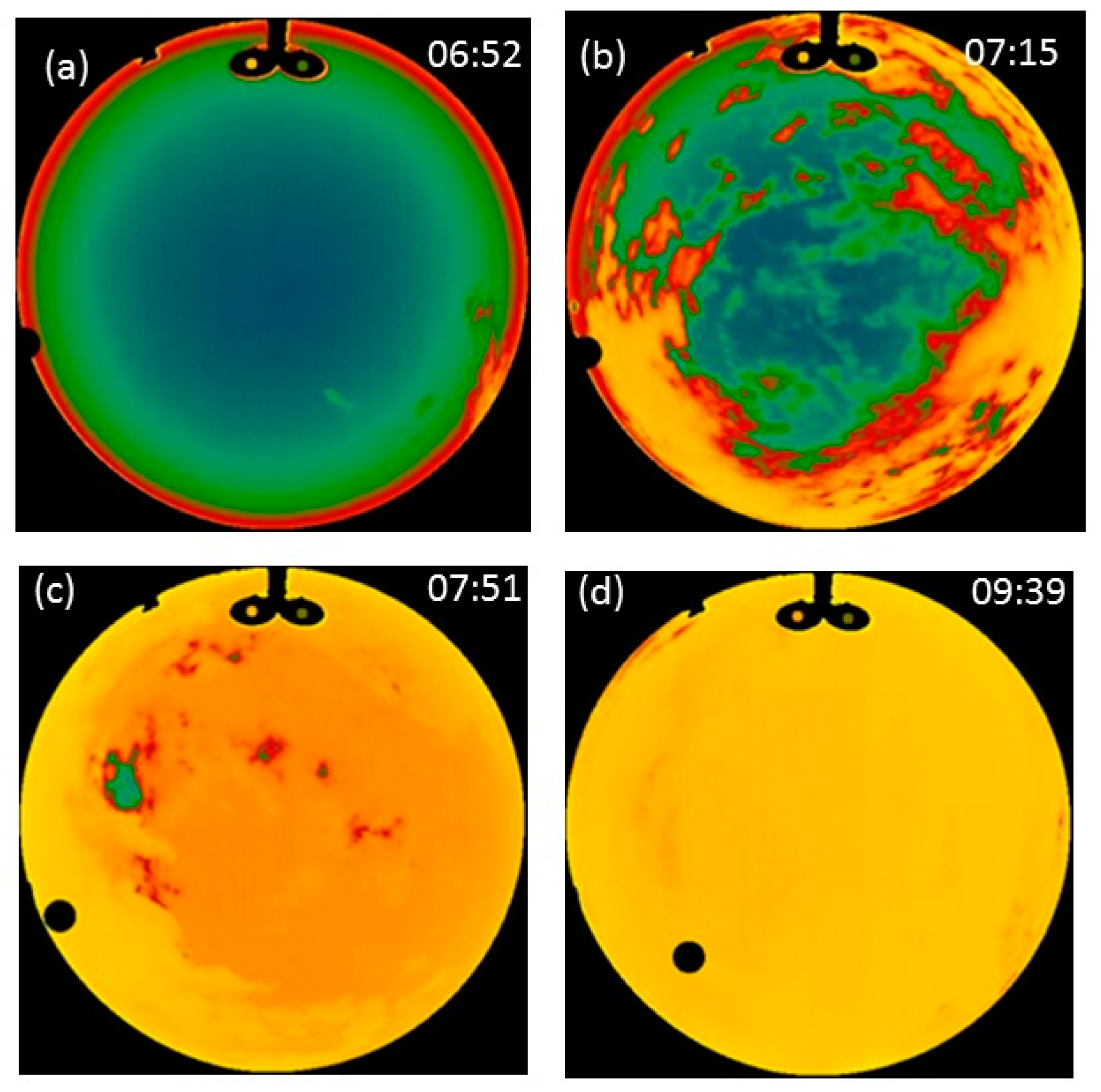
- Brightness temperature images of the whole sky. These values are always smaller than the corresponding air temperatures. So far at our location, the minimal zenith brightness temperature we measured was 198 K. These images are also available in processed jpeg format for quick visualization and qualitative analysis.
- Clear sky subtracted image. Each pixel has a value that reflects its difference from the clear sky estimation. We used as thresholds the following values: under 0.05—clear sky, 0.05–0.1—thin clouds, above 0.1—thick clouds.
- Total thick and thin cloud sky cover for each whole sky image, which is the fraction of the sky hemisphere that is covered by this cloud type. It is calculated according to the following formulation:
2.2.2. Doppler Wind Lidar
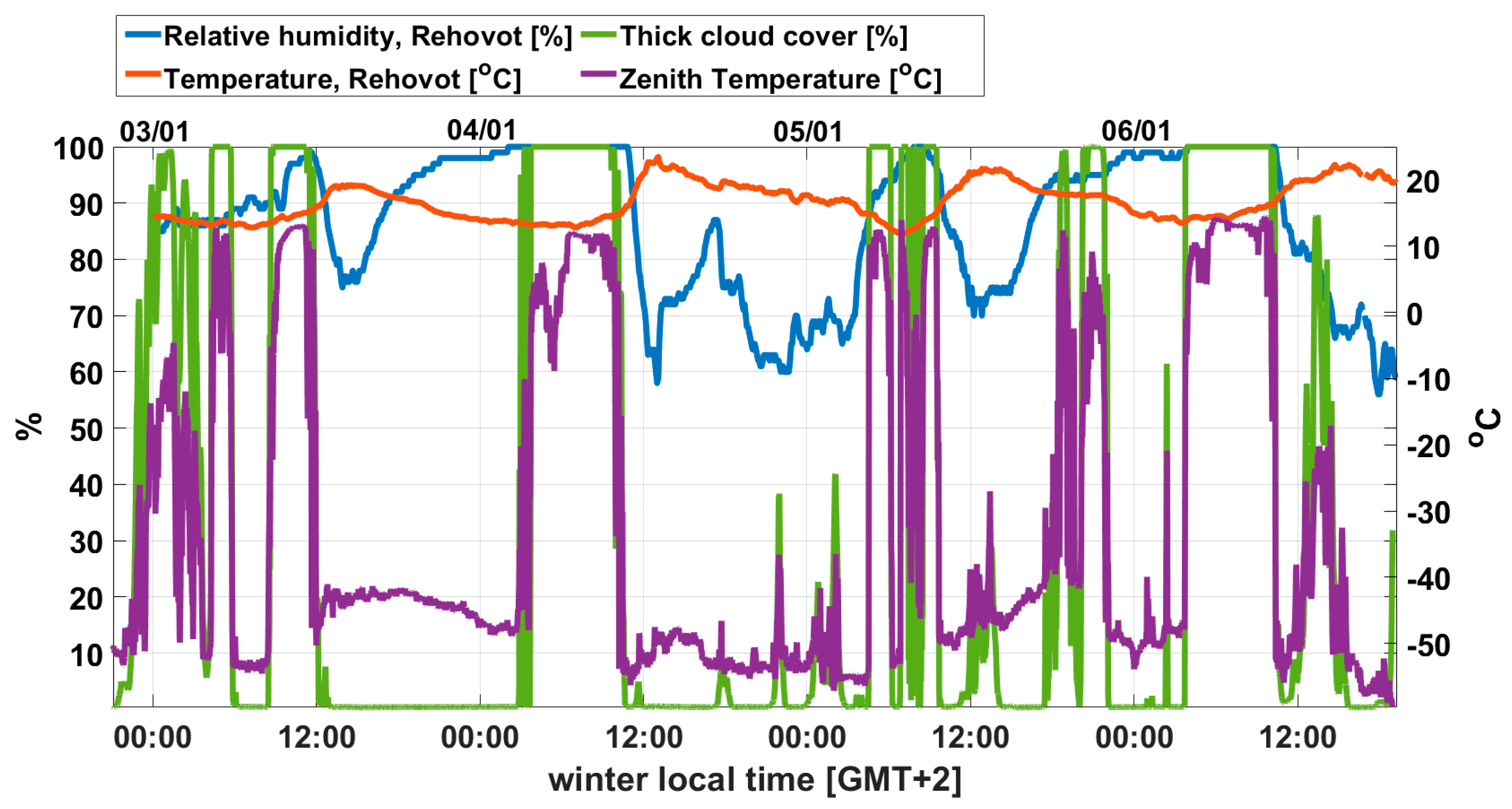
3. Results: Meteorological Parameters and Their Reflection on the Remotely Sensed Products
3.1. WSI
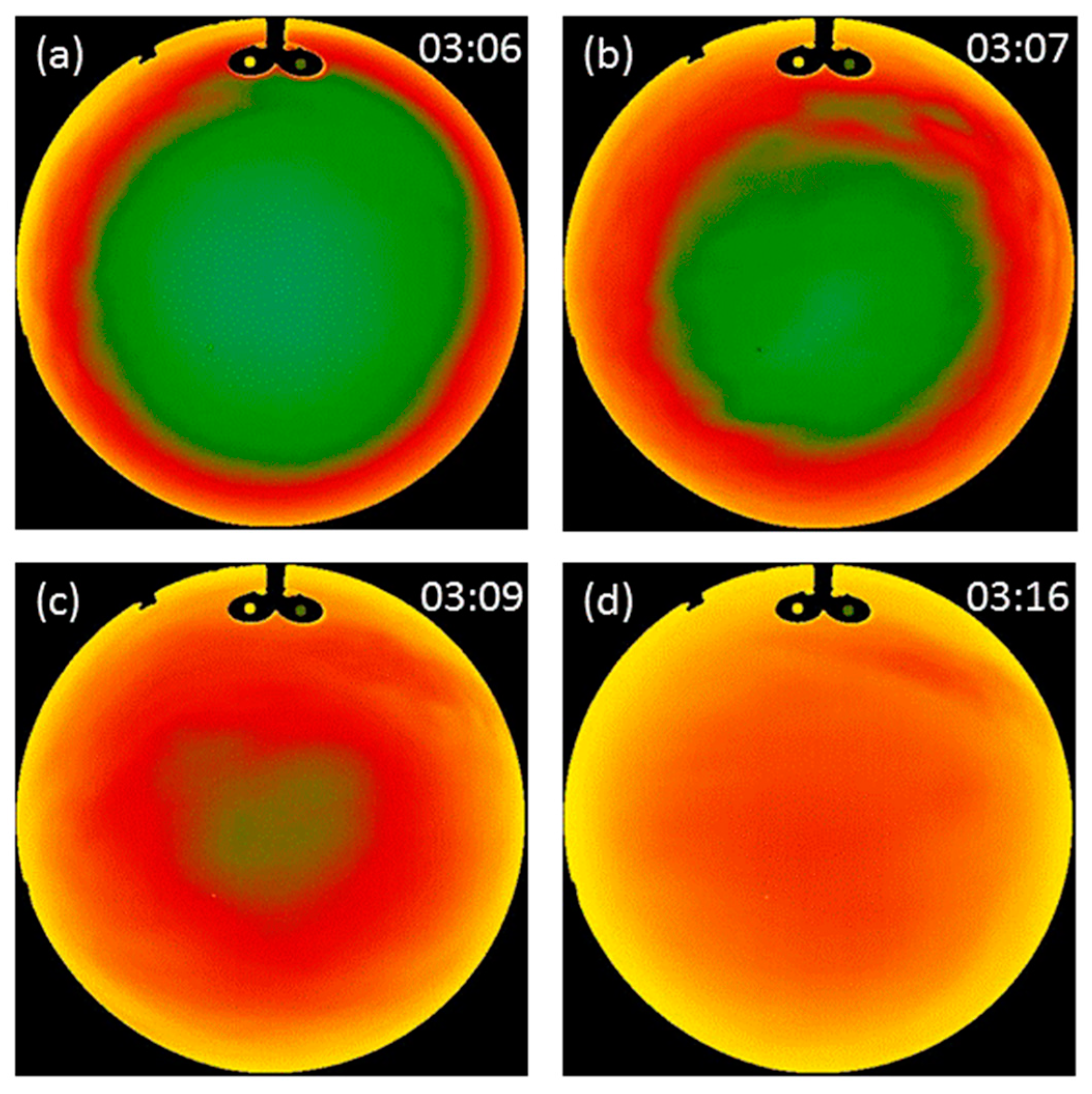
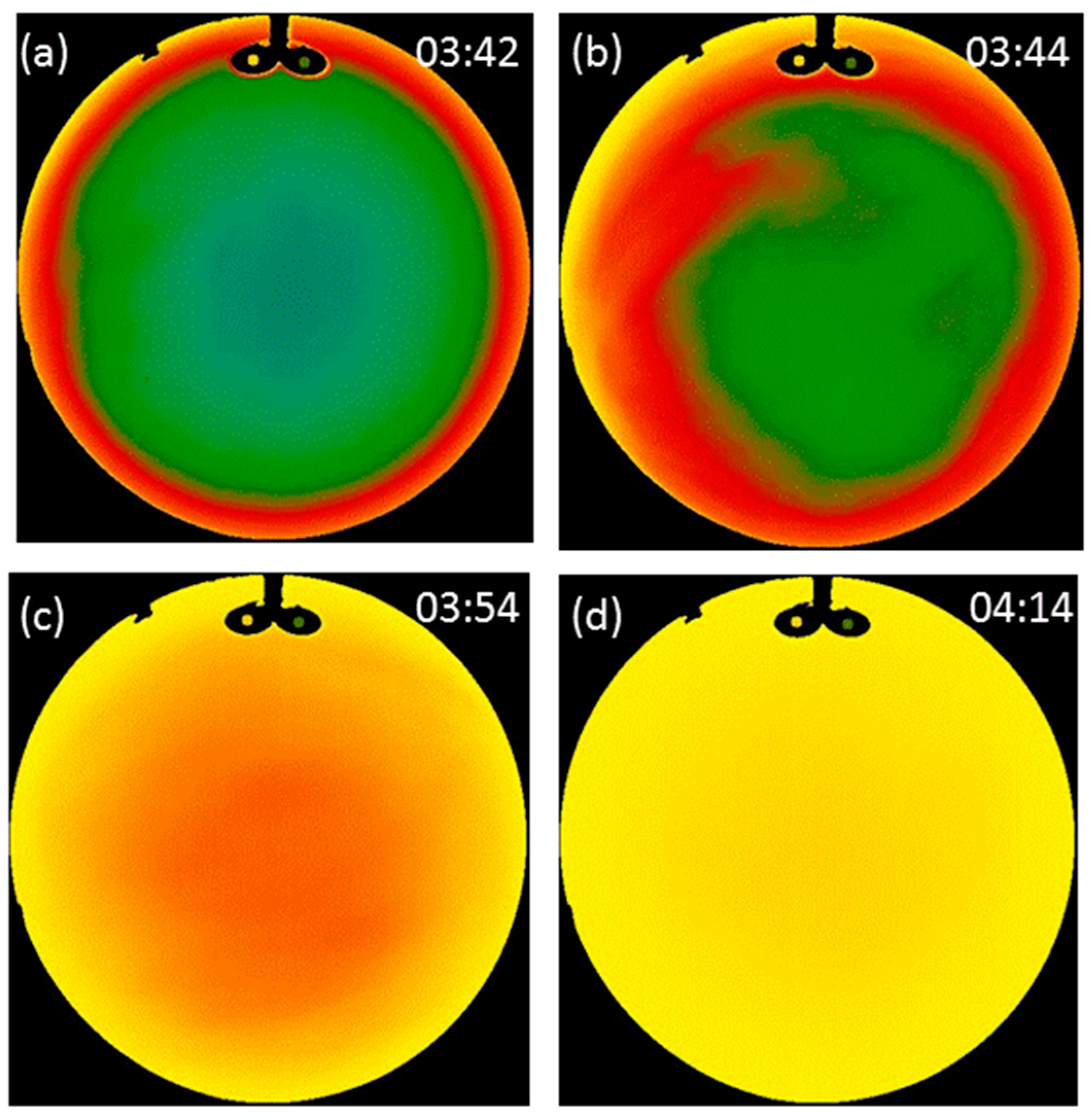
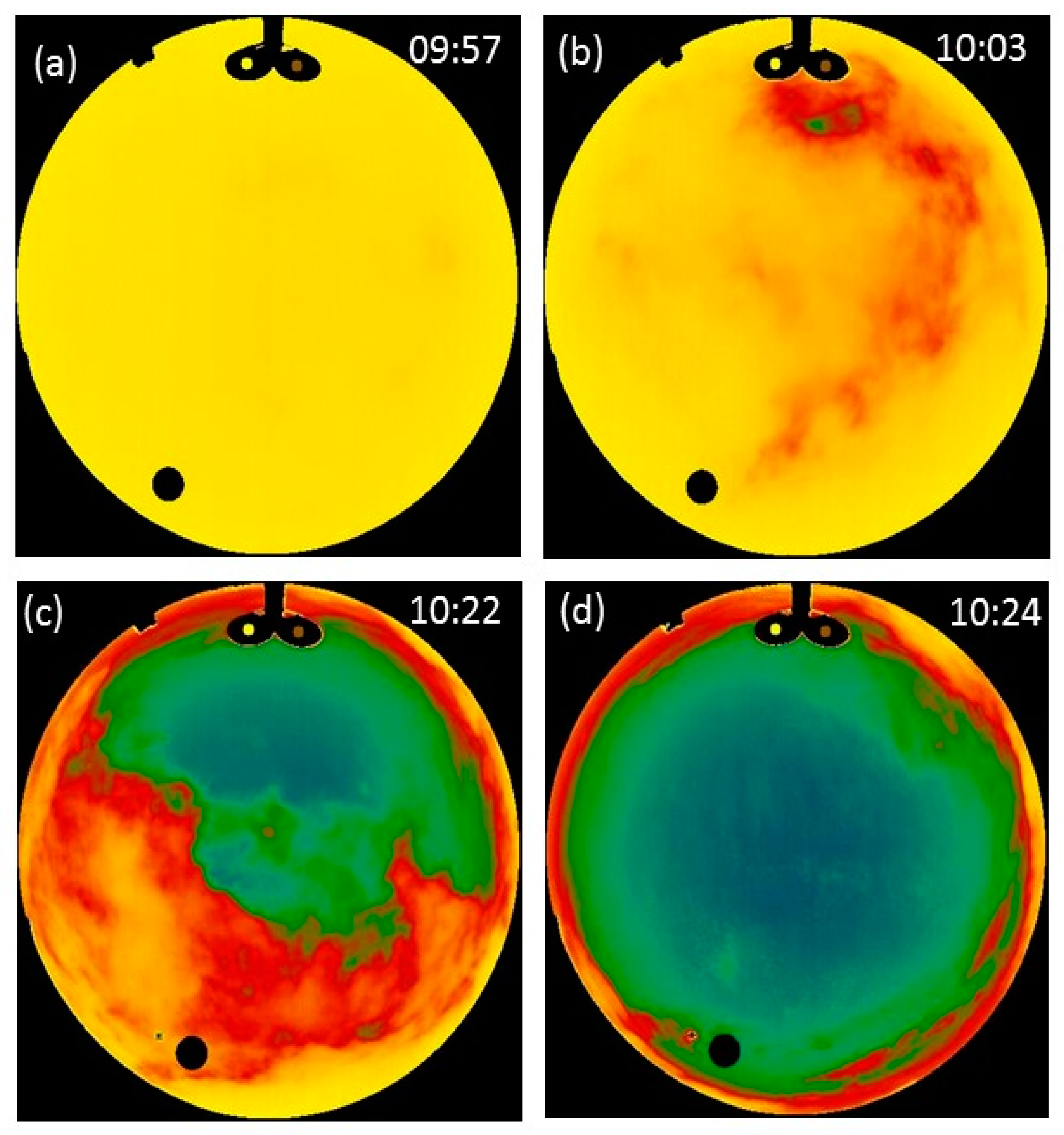
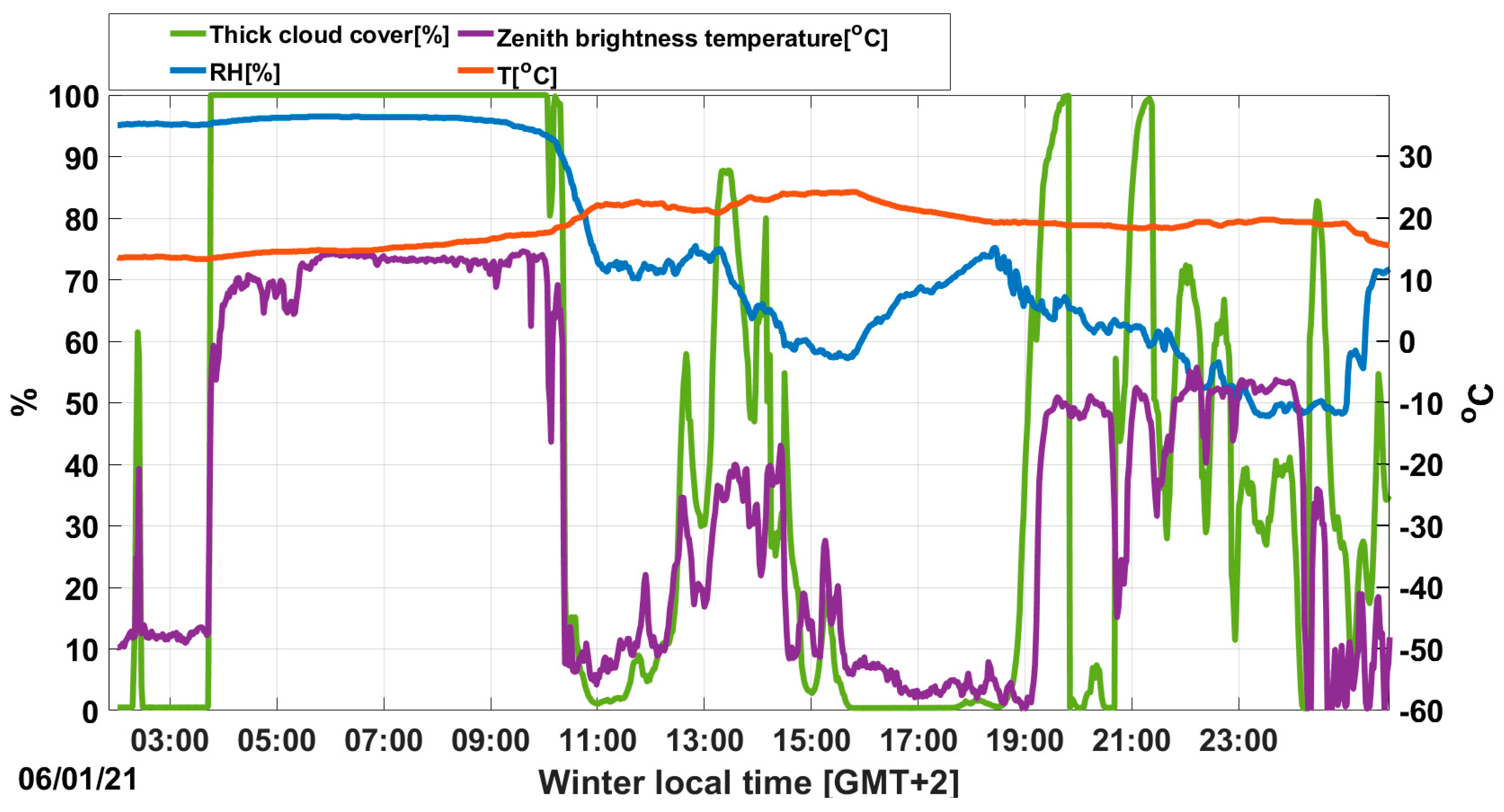
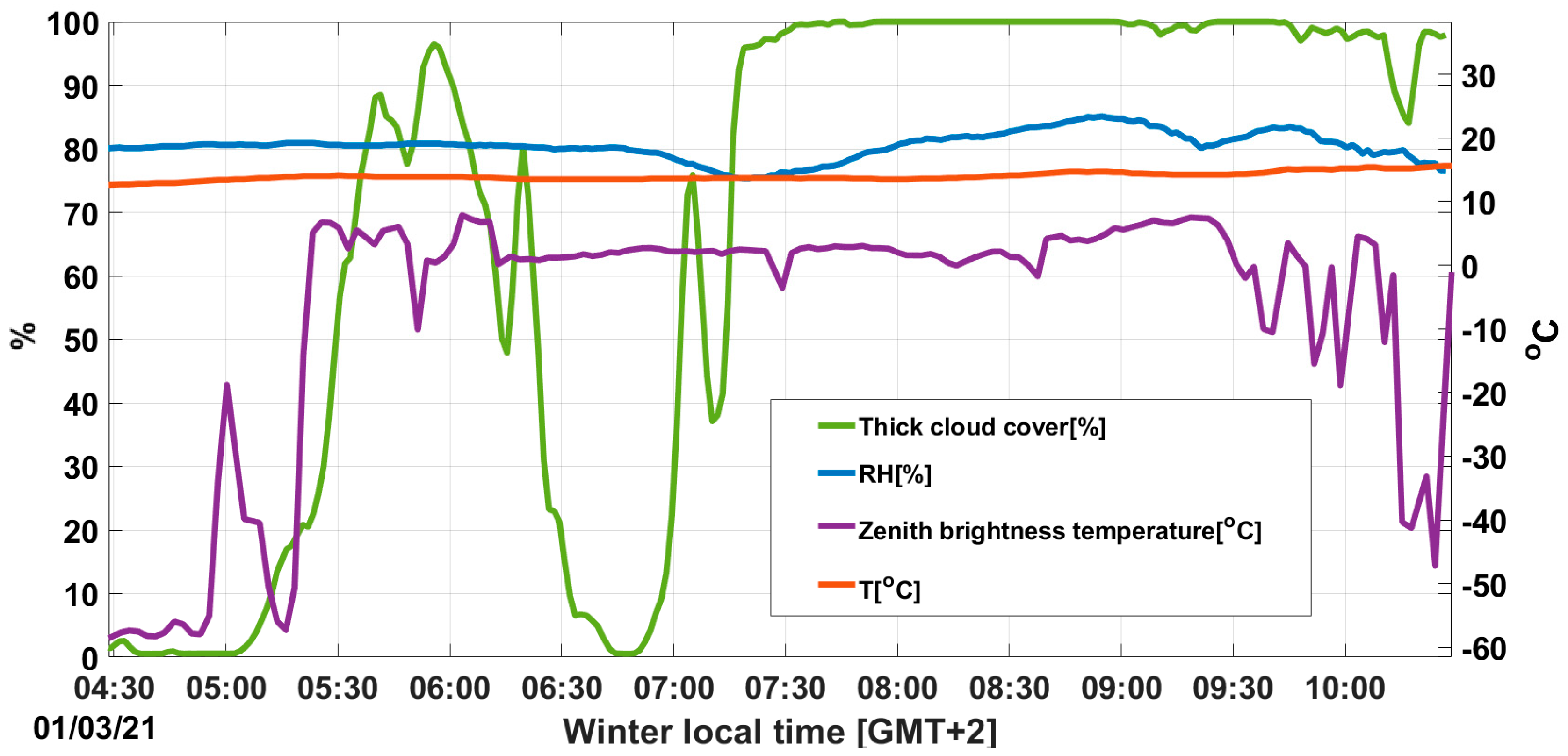
3.1.1. Comparison of the Buildup and Dissipation of a Cloudy and Foggy Sky with WSI
3.1.2. Comparison of Radiative and Convective Fog Seen on WSI
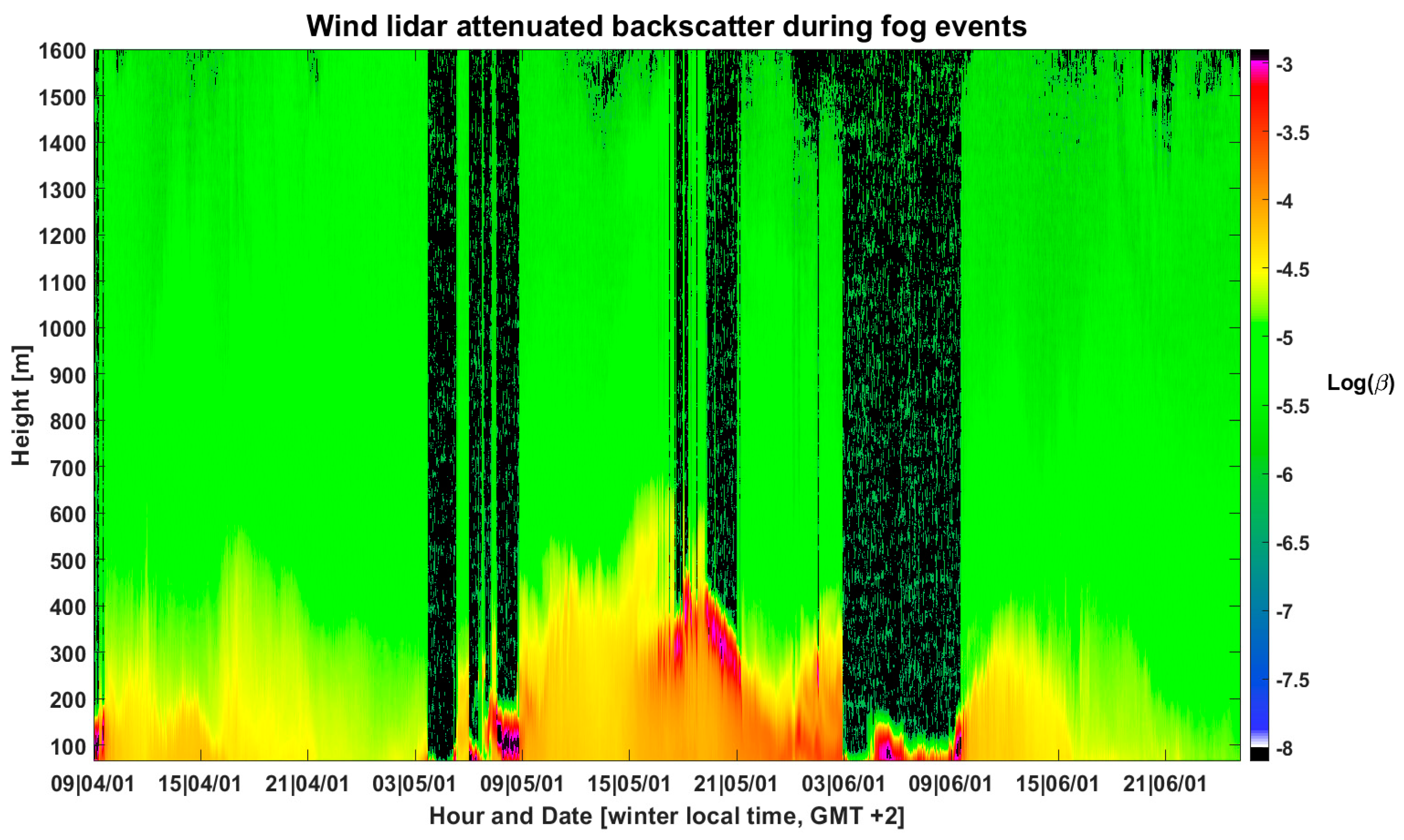
3.2. StreamLine Doppler Lidar
4. Discussion and Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Radiative Transfer Equation of Cloud Observation in the LWIR
References
- World Meteorological Organization: Fog. Available online: https://www.wmocloudatlas.org/fog.html#sthash.11lruLve.dpuf (accessed on 25 April 2021).
- Goldreich, Y. The Climate of Israel: Observation, Research and Application; Springer Science & Business Media: Berlin, Germany, 2012; p. 129. [Google Scholar]
- Levi, W.M. Fog in Israel. Isr. J. Earth Sci. 1967, 16, 7–21. [Google Scholar]
- Alpert, P.; Osetinsky, I.; Ziv, B.; Shafir, H. Semi-objective classification for daily synoptic systems: Application to the Eastern Mediterranean climate change. Int. J. Climatol. 2004, 24, 1001–1011. [Google Scholar] [CrossRef]
- Special Review of the Rare Fog Event Published by The Israel Meteorological Service (IMS). Available online: https://ims.gov.il/sites/default/files/2021-01/%D7%A8%D7%A6%D7%A3%20%D7%99%D7%9E%D7%99%20%D7%A2%D7%A8%D7%A4%D7%9C%20%D7%99%D7%A0%D7%95%D7%90%D7%A8%202021.pdf (accessed on 28 April 2021). (In Hebrew)
- Heavy Fog in the Morning. Available online: https://www.ynet.co.il/news/article/r1LLtT0Tv (accessed on 3 January 2021).
- Cloud Observations with Sky InSight™ All-Sky Imager. Available online: https://reuniwatt.com/en/247-all-sky-observation-sky-insight (accessed on 21 August 2021).
- Rösner, B.; Egli, S.; Thies, B.; Beyer, T.; Callies, D.; Pauscher, L.; Bendix, J. Fog and Low Stratus Obstruction of Wind Lidar Observations in Germany—A Remote Sensing-Based Data Set for Wind Energy Planning. Energies 2020, 13, 3859. [Google Scholar] [CrossRef]
- Gultepe, I.; Fernando, H.J.S.; Pardyjak, E.R.; Hoch, S.W.; Silver, Z.; Creegan, E.; Leo, L.S.; Pu, Z.; De Wekker, S.F.J.; Hang, C. An overview of the MATERHORN fog project: Observations and predictability. Pure Appl. Geophys. 2016, 173, 2983–3010. [Google Scholar] [CrossRef]
- Bohren, F.; Huffman, D.R. Absorption and scattering by a sphere. In Absorption and Scattering of Light by Small Particles; Wiley: New York, NY, USA, 1998; Chapter 4; pp. 82–129. [Google Scholar]
- Mätzler, C. MATLAB Functions for Mie Scattering and Absorption, v.2. IAP Res., Bern, Schweiz, Rep. 8 no. 1, Jun. 2002. Available online: https://omlc.org/software/mie/maetzlermie/Maetzler2002.pdf (accessed on 1 February 2021).
- D’Almeida, G.A.; Koepke, P.; Shettle, E.P. A Global Aerosol model. In Atmospheric Aerosols: Global Climatology and Radiative Characteristics; A Deepak Pub: Hampton, VA, USA, 1991; Chapter 4, Section 4.5; pp. 56–60. [Google Scholar]
- Available online: https://meteo.moag.gov.il/home/map? TargetIds = 11 (accessed on 10 January 2021).
- Available online: https://ims.data.gov.il (accessed on 10 January 2021).
- Shaw, J.A.; Nugent, P.; Pust, N.J.; Thurairajah, B.; Mizutani, K. Radiometric cloud imaging with an uncooled microbolometer thermal infrared camera. Opt. Express 2005, 13, 5807–5817. [Google Scholar] [CrossRef] [PubMed]
- Sebag, J.; Andrewa, J.; Klebe, D.; Blatherwick, R.D. LSST All-Sky IR Camera Cloud Monitoring Test Results. In Proceedings of the SPIE 7733, Groundbased and Airborne Telescopes III, San Diego, CA, USA, 5–6 August 2010; Volume 773348. [Google Scholar]
- Klebe, D.; Blatherwick, R.D.; Morris, V.R. Ground-based All-Sky Mid-Infrared and Visible Imagery for Purposes of Characterizing Cloud Properties. Atmos. Meas. Tech. 2014, 7, 637–645. [Google Scholar] [CrossRef] [Green Version]
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; van den Bosch, J. MODTRAN6: A major upgrade of the MODTRAN radiative transfer code. In Proceedings of the SPIE 9088, Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XX, 90880H, Baltimore, MD, USA, 5–9 May 2014. [Google Scholar] [CrossRef]
- Pearson, G.; Davies, F.; Collier, C. An analysis of the performance of the UFAM pulsed Doppler lidar for observing the boundary layer. J. Atmos. Ocean. Technol. 2009, 26, 240–250. [Google Scholar] [CrossRef]
- Klett, J.D. Stable analytical inversion solution for processing lidar returns. Appl. Opt. 1981, 20, 211–220. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shaw, J.A.; Nugent, P.W. Physics principles in radiometric infrared imaging of clouds in the atmosphere. Eur. J. Phys. 2013, 34, S111–S121. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ronen, A.; Tzadok, T.; Rostkier-Edelstein, D.; Agassi, E. Fog Measurements with IR Whole Sky Imager and Doppler Lidar, Combined with In Situ Instruments. Remote Sens. 2021, 13, 3320. https://doi.org/10.3390/rs13163320
Ronen A, Tzadok T, Rostkier-Edelstein D, Agassi E. Fog Measurements with IR Whole Sky Imager and Doppler Lidar, Combined with In Situ Instruments. Remote Sensing. 2021; 13(16):3320. https://doi.org/10.3390/rs13163320
Chicago/Turabian StyleRonen, Ayala, Tamir Tzadok, Dorita Rostkier-Edelstein, and Eyal Agassi. 2021. "Fog Measurements with IR Whole Sky Imager and Doppler Lidar, Combined with In Situ Instruments" Remote Sensing 13, no. 16: 3320. https://doi.org/10.3390/rs13163320
APA StyleRonen, A., Tzadok, T., Rostkier-Edelstein, D., & Agassi, E. (2021). Fog Measurements with IR Whole Sky Imager and Doppler Lidar, Combined with In Situ Instruments. Remote Sensing, 13(16), 3320. https://doi.org/10.3390/rs13163320