
A Novel Framework of Integrating UV and NIR Atmospheric Correction Algorithms for Coastal Ocean Color Remote Sensing

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. NASA-STD AC Algorithm
2.2. UV AC Algorithm
2.3. UV-NIR Jointed AC Algorithm
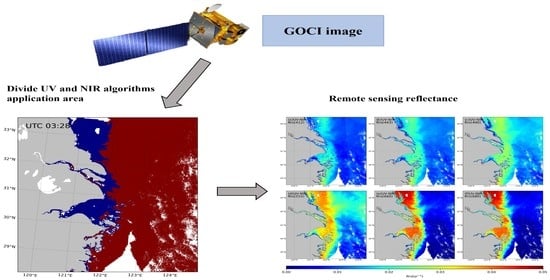
- (a)
- We use the GOCI Rayleigh scattering lookup table to perform Rayleigh scattering correction on the apparent reflectance of the TOA and obtain the Rayleigh scattering corrected reflectance for the 412-, 443-, 490-, 555-, 660-, 680-, 745-, and 865-nm bands.
- (b)
- According to the reflectance of 412- and 865-nm Rayleigh scattering correction, the applicable area of the AC algorithm is divided. The pixels of are the area of using the UV AC (412 nm) algorithm; the pixels of are the area of using the NIR AC algorithm.
- (c)
- The UV and NASA-STD AC algorithms are applied to the applicable areas of the UV and NIR AC algorithms obtained in step 2 to obtain the remote sensing reflectance ().
- (d)
- We utilize the UV AC (412 nm) algorithm for the pixels that have failed to use the NASA-STD AC algorithm and identify the pixels with the same remote sensing reflectance of the UV algorithm and NIR remote sensing reflectance; we use the UV AC (412 nm) remote sensing reflectance results on the shore side, and NASA-STD AC remote sensing reflectance results on the far shore side are accepted.
- (e)
- Finally, we integrate the remote sensing reflectance results of the UV algorithm application area, the NIR algorithm application area, and the transition area to obtain the whole AC result.
2.4. Simulated, GOCI and In-Suit Data
2.4.1. Simulated Top of Atmospheric (TOA) Reflectance
2.4.2. GOCI and In-Suit Data
2.5. Performance Assessment
3. Results
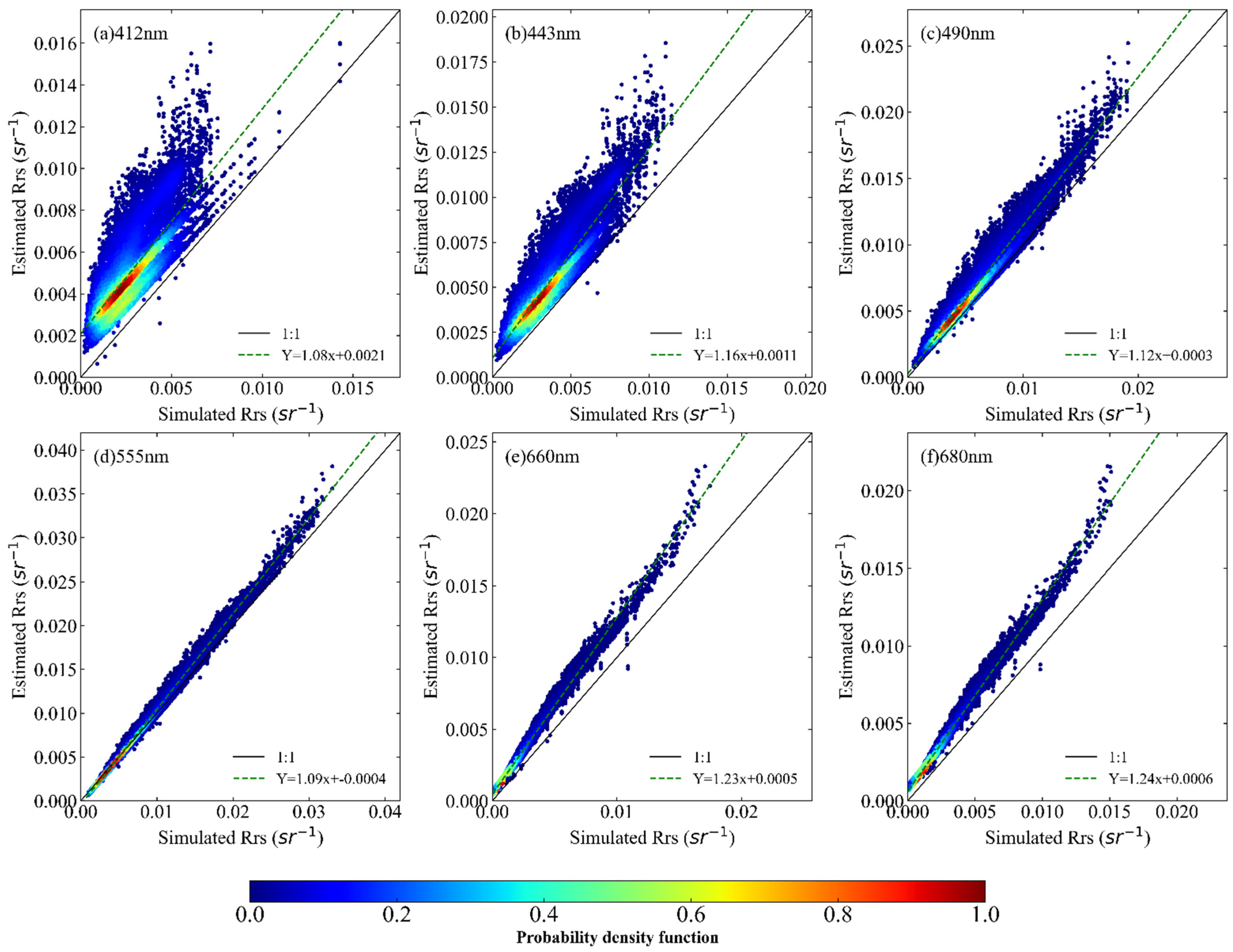
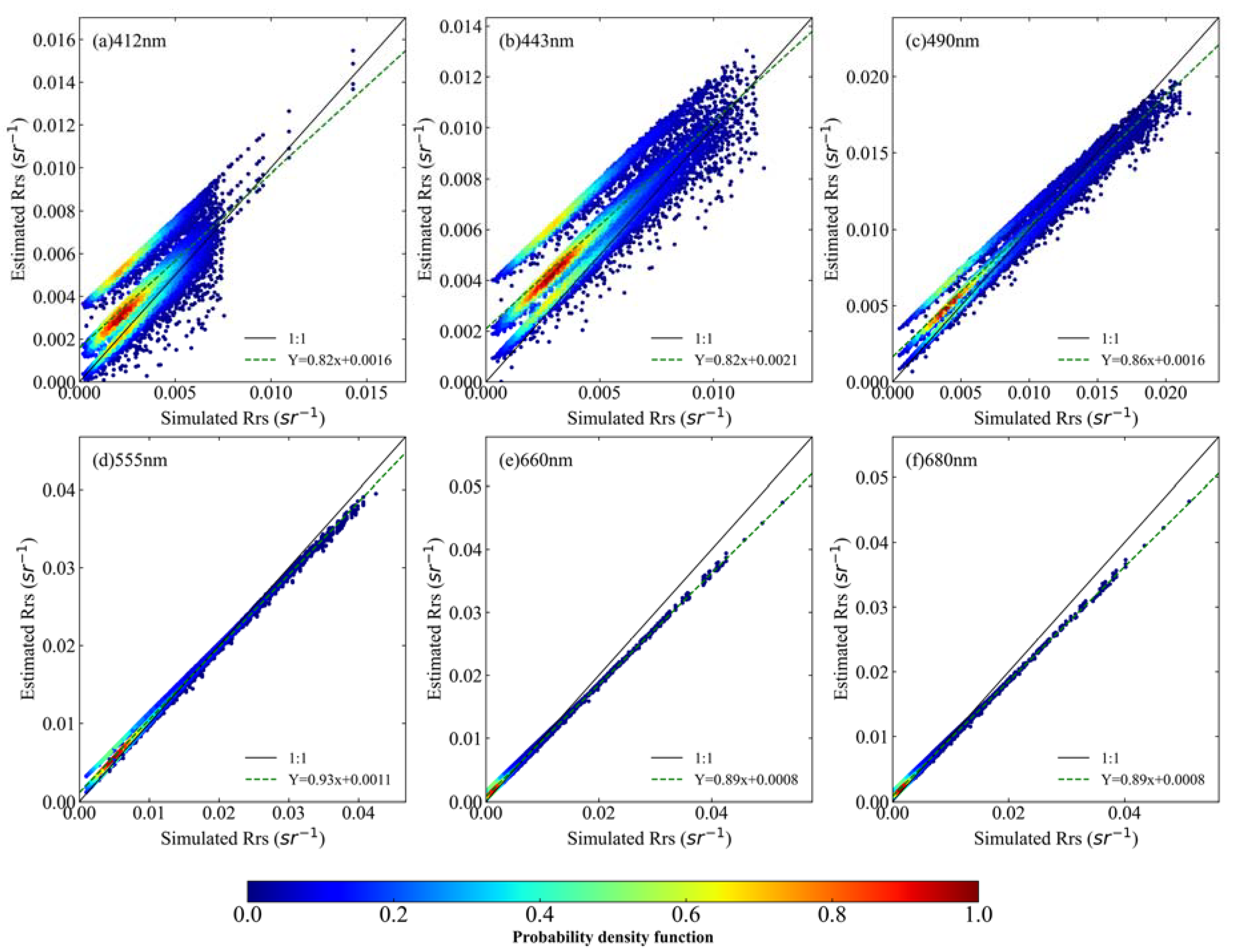
3.1. Evaluation of NIR Algorithms Using Simulated Data
3.2. AC Algorithm Applicable Area Division
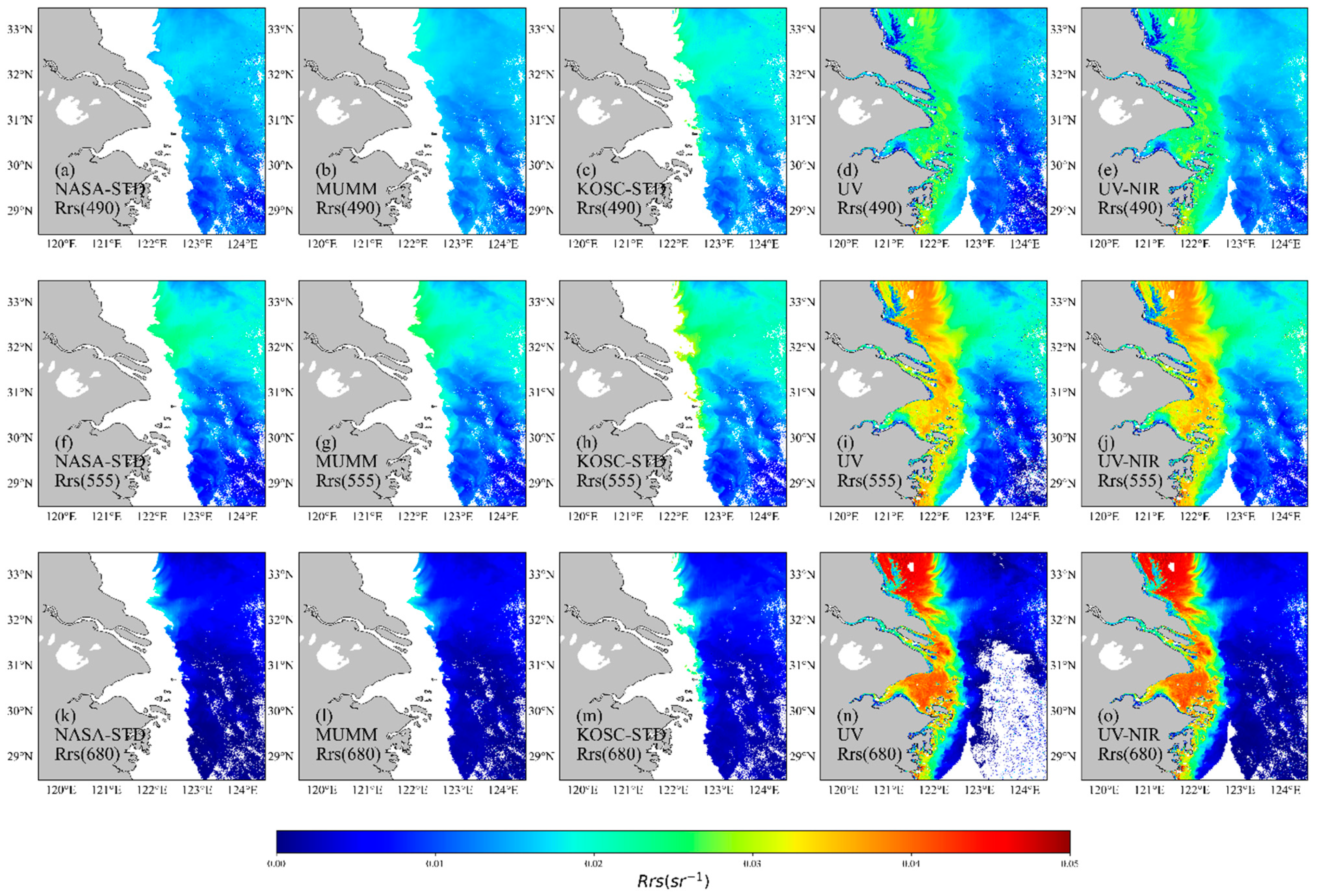
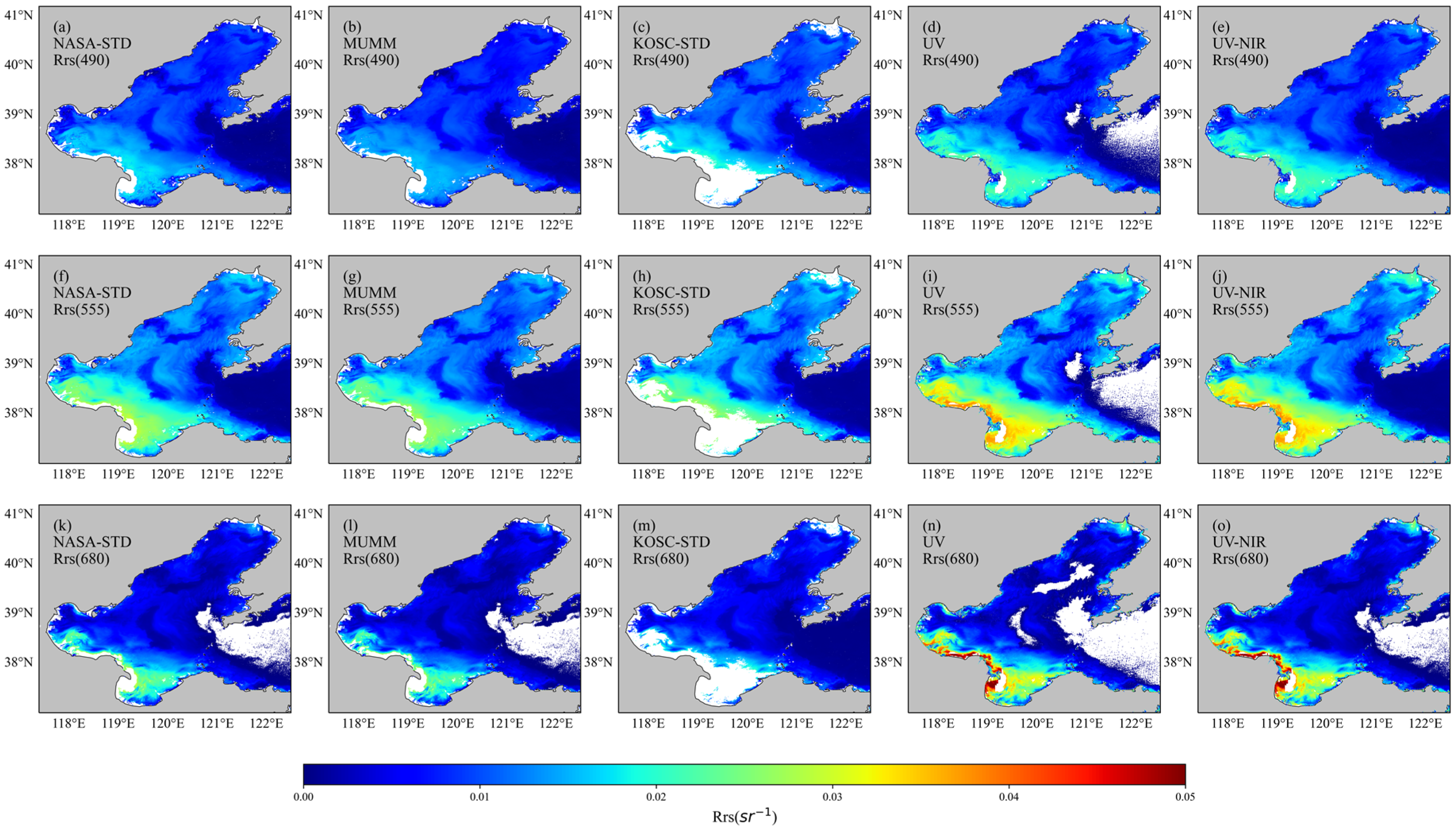
3.3. Comparison of AC Results
3.4. Algorithm Performance Evaluation Using Satellite Image
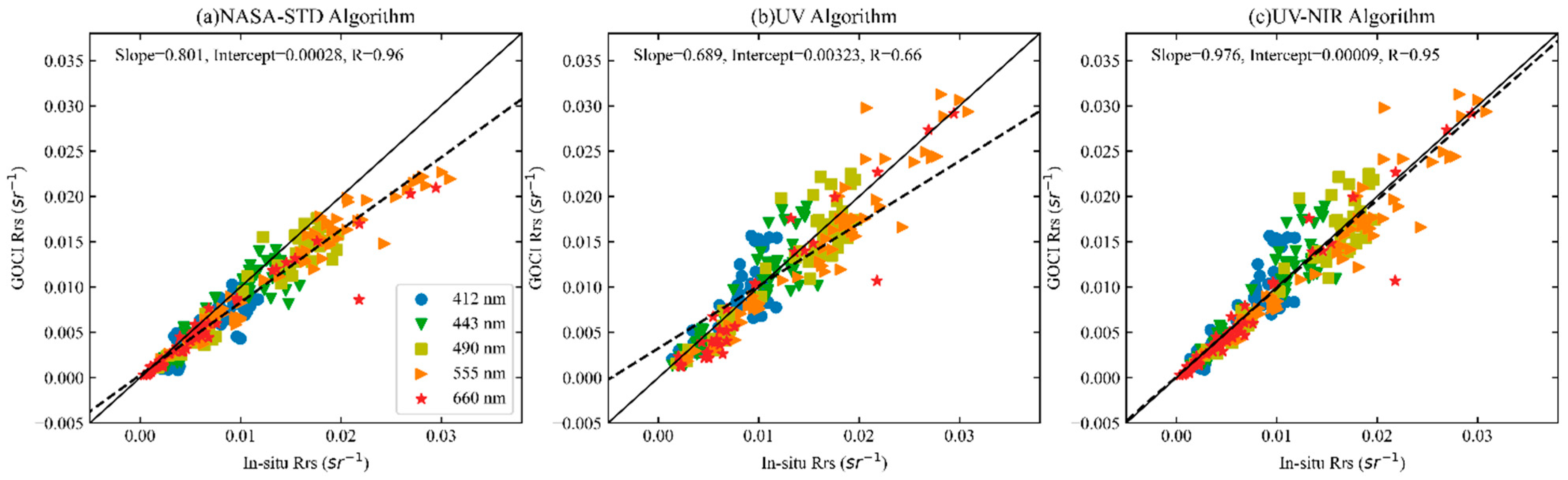
3.5. Evaluation of UV-NIR AC Using In-Situ Data
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Choi, J.-K.; Park, Y.J.; Ahn, J.H.; Lim, H.-S.; Eom, J.; Ryu, J.-H. GOCI, the World’s First Geostationary Ocean Color Observation Satellite, for the Monitoring of Temporal Variability in Coastal Water Turbidity. J. Geophys. Res. Ocean. 2012, 117, C09004. [Google Scholar] [CrossRef]
- He, X.; Bai, Y.; Pan, D.; Huang, N.; Dong, X.; Chen, J.; Chen, C.-T.A.; Cui, Q. Using Geostationary Satellite Ocean Color Data to Map the Diurnal Dynamics of Suspended Particulate Matter in Coastal Waters. Remote Sens. Environ. 2013, 133, 225–239. [Google Scholar] [CrossRef]
- Doxaran, D.; Lamquin, N.; Park, Y.-J.; Mazeran, C.; Ryu, J.-H.; Wang, M.; Poteau, A. Retrieval of the Seawater Reflectance for Suspended Solids Monitoring in the East China Sea Using MODIS, MERIS and GOCI Satellite Data. Remote Sens. Environ. 2014, 146, 36–48. [Google Scholar] [CrossRef]
- Chau, P.M.; Wang, C.-K.; Huang, A.-T. The Spatial-Temporal Distribution of GOCI-Derived Suspended Sediment in Taiwan Coastal Water Induced by Typhoon Soudelor. Remote Sens. 2021, 13, 194. [Google Scholar] [CrossRef]
- Du, Y.; Lin, H.; He, S.; Wang, D.; Wang, Y.P.; Zhang, J. Tide-Induced Variability and Mechanisms of Surface Suspended Sediment in the Zhoushan Archipelago along the Southeastern Coast of China Based on GOCI Data. Remote Sens. 2021, 13, 929. [Google Scholar] [CrossRef]
- Lou, X.; Hu, C. Diurnal Changes of a Harmful Algal Bloom in the East China Sea: Observations from GOCI. Remote Sens. Environ. 2014, 140, 562–572. [Google Scholar] [CrossRef]
- Lee, M.-S.; Park, K.-A.; Micheli, F. Derivation of Red Tide Index and Density Using Geostationary Ocean Color Imager (GOCI) Data. Remote Sens. 2021, 13, 298. [Google Scholar] [CrossRef]
- Hu, Z.; Wang, D.P.; Pan, D.; He, X.; Miyazawa, Y.; Bai, Y.; Wang, D.; Gong, F. Mapping Surface Tidal Currents and Changjiang Plume in the East China Sea from Geostationary Ocean Color Imager. J. Geophys. Res. Ocean. 2016, 121, 1563–1572. [Google Scholar] [CrossRef] [Green Version]
- Park, K.-A.; Lee, M.-S.; Park, J.-E.; Ullman, D.; Cornillon, P.C.; Park, Y.-J. Surface Currents from Hourly Variations of Suspended Particulate Matter from Geostationary Ocean Color Imager Data. Int. J. Remote Sens. 2018, 39, 1929–1949. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Chen, J.; Cao, Z.; Shen, Y. Improving Surface Current Estimation From Geostationary Ocean Color Imager Using Tidal Ellipse and Angular Limitation. J. Geophys. Res. Ocean. 2019, 124, 4322–4333. [Google Scholar] [CrossRef]
- Wang, M.; Shi, W.; Jiang, L. Atmospheric Correction Using Near-Infrared Bands for Satellite Ocean Color Data Processing in the Turbid Western Pacific Region. Opt. Express 2012, 20, 741. [Google Scholar] [CrossRef]
- Gordon, H.R.; Wang, M. Retrieval of Water-Leaving Radiance and Aerosol Optical Thickness over the Oceans with SeaWiFS: A Preliminary Algorithm. Appl. Opt. 1994, 33, 443. [Google Scholar] [CrossRef] [PubMed]
- Gordon, H.R.; Wang, M. Surface-Roughness Considerations for Atmospheric Correction of Ocean Color Sensors 1: The Rayleigh-Scattering Component. Appl. Opt. 1992, 31, 4247. [Google Scholar] [CrossRef] [PubMed]
- Wang, M. The Rayleigh Lookup Tables for the SeaWiFS Data Processing: Accounting for the Effects of Ocean Surface Roughness. Int. J. Remote Sens. 2002, 23, 2693–2702. [Google Scholar] [CrossRef]
- Shanmugam, V.; Shanmugam, P.; He, X. New Algorithm for Computation of the Rayleigh-Scattering Radiance for Remote Sensing of Water Color from Space. Opt. Express 2019, 27, 30116. [Google Scholar] [CrossRef]
- Liu, G.; Li, Y.; Lyu, H.; Wang, S.; Du, C.; Huang, C. An Improved Land Target-Based Atmospheric Correction Method for Lake Taihu. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 793–803. [Google Scholar] [CrossRef]
- Wang, M.; Jiang, L. Atmospheric Correction Using the Information From the Short Blue Band. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6224–6237. [Google Scholar] [CrossRef]
- Pan, Y.; Shen, F.; Verhoef, W. An Improved Spectral Optimization Algorithm for Atmospheric Correction over Turbid Coastal Waters: A Case Study from the Changjiang (Yangtze) Estuary and the Adjacent Coast. Remote Sens. Environ. 2017, 191, 197–214. [Google Scholar] [CrossRef] [Green Version]
- Gordon, H.R. Removal of Atmospheric Effects from Satellite Imagery of the Oceans. Appl. Opt. 1978, 17, 1631. [Google Scholar] [CrossRef]
- Shettle, E.; Fenn, R. Models for the Aerosols of the Lower Atmosphere and the Effects of Humidity Variations on Their Optical Properties. Environ. Res. 1979, 94, 504. [Google Scholar]
- Ahmad, Z.; Franz, B.A.; McClain, C.R.; Kwiatkowska, E.J.; Werdell, J.; Shettle, E.P.; Holben, B.N. New Aerosol Models for the Retrieval of Aerosol Optical Thickness and Normalized Water-Leaving Radiances from the SeaWiFS and MODIS Sensors over Coastal Regions and Open Oceans. Appl. Opt. 2010, 49, 5545. [Google Scholar] [CrossRef]
- Mobley, C.D.; Werdell, J.; Franz, B.; Ahmad, Z.; Bailey, S. Atmospheric Correction for Satellite Ocean Color Radiometry. Tech. Rep. 2016, 85. [Google Scholar] [CrossRef]
- Bailey, S.W.; Franz, B.A.; Werdell, P.J. Estimation of Near-Infrared Water-Leaving Reflectance for Satellite Ocean Color Data Processing. Opt. Express 2010, 18, 7521. [Google Scholar] [CrossRef] [PubMed]
- Ahn, J.-H.; Park, Y.-J. Estimating Water Reflectance at Near-Infrared Wavelengths for Turbid Water Atmospheric Correction: A Preliminary Study for GOCI-II. Remote Sens. 2020, 12, 3791. [Google Scholar] [CrossRef]
- Xue, C.; Chen, S.; Lee, Z.; Hu, L.; Shi, X.; Lin, M.; Liu, J.; Ma, C.; Song, Q.; Zhang, T. Iterative Near-Infrared Atmospheric Correction Scheme for Global Coastal Waters. ISPRS J. Photogramm. Remote Sens. 2021, 179, 92–107. [Google Scholar] [CrossRef]
- Pahlevan, N.; Roger, J.-C.; Ahmad, Z. Revisiting Short-Wave-Infrared (SWIR) Bands for Atmospheric Correction in Coastal Waters. Opt. Express 2017, 25, 6015. [Google Scholar] [CrossRef] [PubMed]
- Goyens, C.; Jamet, C.; Schroeder, T. Evaluation of Four Atmospheric Correction Algorithms for MODIS-Aqua Images over Contrasted Coastal Waters. Remote Sens. Environ. 2013, 131, 63–75. [Google Scholar] [CrossRef]
- Wang, M.; Wei, S. The NIR-SWIR Combined Atmospheric Correction Approach for MODIS Ocean Color Data Processing. Opt. Express 2007, 15, 15722–15733. [Google Scholar] [CrossRef] [Green Version]
- Shi, W.; Wang, M. An Assessment of the Black Ocean Pixel Assumption for MODIS SWIR Bands. Remote Sens. Environ. 2009, 11, 1587–1597. [Google Scholar] [CrossRef]
- He, X.; Bai, Y.; Pan, D.; Tang, J.; Wang, D. Atmospheric Correction of Satellite Ocean Color Imagery Using the Ultraviolet Wavelength for Highly Turbid Waters. Opt. Express 2012, 20, 20754. [Google Scholar] [CrossRef]
- Ahn, J.-H.; Park, Y.-J.; Ryu, J.-H.; Lee, B.; Oh, I.S. Development of Atmospheric Correction Algorithm for Geostationary Ocean Color Imager (GOCI). Ocean Sci. J. 2012, 47, 247–259. [Google Scholar] [CrossRef]
- Ruddick, K.G.; Ovidio, F.; Rijkeboer, M. Atmospheric Correction of SeaWiFS Imagery for Turbid Coastal and Inland Waters. Appl. Opt. 2000, 39, 897–912. [Google Scholar] [CrossRef] [Green Version]
- Gordon, H.R.; Brown, J.W.; Evans, R.H. Exact Rayleigh Scattering Calculations for Use with the Nimbus-7 Coastal Zone Color Scanner. Appl. Opt. 1988, 27, 862. [Google Scholar] [CrossRef]
- O’Reilly, J.E.; Maritorena, S.; O’Brien, M.C.; Siegel, D.A.; Toole, D.; Menzies, D.; Smith, R.C.; Mueller, J.L.; Mitchell, B.G.; Kahru, M. SeaWiFS Postlaunch Calibration and Validation Analyses. NASA Tech. Memo.—SeaWIFS Postlaunch Tech. Rep. Ser. 2000, 55, 1–64. [Google Scholar]
- Lee, Z.; Carder, K.L.; Arnone, R.A. Deriving Inherent Optical Properties from Water Color: A Multiband Quasi-Analytical Algorithm for Optically Deep Waters. Appl. Opt. 2002, 41, 5755. [Google Scholar] [CrossRef] [PubMed]
- Kotchenova, S.Y.; Vermote, E.F.; Matarrese, R.; Klemm, F.J., Jr. Validation of a Vector Version of the 6S Radiative Transfer Code for Atmospheric Correction of Satellite Data Part I: Path Radiance. Appl. Opt. 2006, 45, 6762. [Google Scholar] [CrossRef] [Green Version]
- Kotchenova, S.Y.; Vermote, E.F. Validation of a Vector Version of the 6S Radiative Transfer Code for Atmospheric Correction of Satellite Data Part II Homogeneous Lambertian and Anisotropic Surfaces. Appl. Opt. 2007, 46, 4455. [Google Scholar] [CrossRef] [Green Version]
- Wilson, R.T. Py6S: A Python Interface to the 6S Radiative Transfer Model. Comput. Geosci. 2013, 51, 166–171. [Google Scholar] [CrossRef] [Green Version]
- Nechad, B.; Ruddick, K.; Schroeder, T.; Oubelkheir, K.; Blondeau-Patissier, D.; Cherukuru, N.; Brando, V.; Dekker, A.; Clementson, L.; Banks, A.C.; et al. CoastColour Round Robin Data Sets: A Database to Evaluate the Performance of Algorithms for the Retrieval of Water Quality Parameters in Coastal Waters. Earth Syst. Sci. Data 2015, 7, 319–348. [Google Scholar] [CrossRef] [Green Version]
- Zibordi, G.; Mélin, F.; Berthon, J.F.; Holben, B.; Slutsker, I.; Giles, D.; D’Alimonte, D.; Vandemark, D.; Feng, H.; Schuster, G. AERONET-OC: A Network for the Validation of Ocean Color Primary Products. J. Atmos. Ocean. Technol. 2009, 26, 1634–1651. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Atmospheric Profile | Midlatitude Summer |
| Aerosol Model | Continental, Marine |
| Aerosol Optical Thickness (at 550 nm) | 0.1, 0.2 |
| Target Altitude | Sea Level |
| Sensor Altitude | Sensor Satellite Level |
| Stations | Lat (°N) | Lon (°E) | Time-Window | Data Period | Number of Match-Ups |
|---|---|---|---|---|---|
| Gageocho | 33.94 | 125.59 | ±0.5 h | October 2011–May 2012 | 10 |
| Ieodo | 32.12 | 125.18 | ±0.5 h | December 2013–February 2018 | 20 |
| Socheongcho | 37.42 | 124.73 | ±0.5 h | May 2016–May 2019 | 8 |
| Dongou | 27.68 | 121.70 | ±0.5 h | January 2020–October 2020 | 25 |
| Muping | 37.68 | 121.35 | ±0.5 h | September 2020–September 2020 | 6 |
| Algorithm | APD | RMSE | Bias | Slope | Intercept | N | ||
|---|---|---|---|---|---|---|---|---|
| KOSC | 412 nm | 109.95 | 0.0026 | 0.0023 | 0.61 | 1.08 | 0.0021 | 16808 |
| 443 nm | 55.77 | 0.0020 | 0.0016 | 0.82 | 1.16 | 0.0011 | 16807 | |
| 490 nm | 18.67 | 0.0012 | 0.0009 | 0.96 | 1.12 | 0.0003 | 16817 | |
| 555 nm | 5.39 | 0.0007 | 0.0003 | 0.99 | 1.09 | 0.0004 | 16824 | |
| 660 nm | 68.32 | 0.0011 | 0.0009 | 0.99 | 1.23 | 0.0005 | 16826 | |
| 680 nm | 72.36 | 0.00132 | 0.0011 | 0.99 | 1.24 | 0.0006 | 16824 | |
| MUMM | 412 nm | 59.47 | 0.0015 | 0.0010 | 0.54 | 0.82 | 0.0016 | 19778 |
| 443 nm | 51.24 | 0.0017 | 0.0013 | 0.74 | 0.82 | 0.0021 | 19783 | |
| 490 nm | 20.94 | 0.0011 | 0.0006 | 0.94 | 0.86 | 0.0016 | 19783 | |
| 555 nm | 13.52 | 0.0008 | 0.0004 | 0.99 | 0.93 | 0.0011 | 19783 | |
| 660 nm | 62.40 | 0.0008 | 0.0003 | 0.99 | 0.89 | 0.0008 | 19783 | |
| 680 nm | 48.23 | 0.0007 | 0.0004 | 0.99 | 0.89 | 0.0008 | 19783 | |
| NASA-STD | 412 nm | 40.16 | 0.0013 | −0.0005 | 0.61 | 1.08 | 0.0008 | 17888 |
| 443 nm | 20.27 | 0.0010 | −0.0002 | 0.85 | 1.16 | 0.0007 | 19300 | |
| 490 nm | 12.14 | 0.0008 | −0.0003 | 0.96 | 1.07 | 0.0008 | 19424 | |
| 555 nm | 7.27 | 0.0006 | −0.0002 | 1.0 | 1.04 | 0.0006 | 19440 | |
| 660 nm | 11.54 | 0.0003 | −0.0004 | 0.99 | 1.05 | 0.0002 | 19408 | |
| 680 nm | 7.17 | 0.0003 | 0.00006 | 0.99 | 1.07 | 0.0002 | 19441 |
| AC Algorithm | APD | RMSE | Bias | Slope | Intercept | N | ||
|---|---|---|---|---|---|---|---|---|
| NASA-STD | 412 | 26.75 | 0.0020 | −0.0014 | 0.77 | 0.84 | −0.0002 | 49 |
| 443 | 19.01 | 0.0020 | −0.0011 | 0.85 | 0.85 | 0.0002 | 57 | |
| 490 | 18.35 | 0.0025 | −0.0019 | 0.91 | 0.86 | −0.0002 | 59 | |
| 555 | 18.78 | 0.0036 | −0.0029 | 0.94 | 0.78 | 0.0004 | 59 | |
| 660 | 21.88 | 0.0025 | −0.0012 | 0.93 | 0.72 | 0.0004 | 58 | |
| UV | 412 | 21.68 | 0.0023 | 0.0006 | 0.71 | 1.10 | −0.00006 | 53 |
| 443 | 17.64 | 0.0023 | 0.0003 | 0.80 | 1.04 | −0.0001 | 54 | |
| 490 | 15.41 | 0.0023 | −0.0004 | 0.86 | 1.04 | −0.0010 | 58 | |
| 555 | 17.94 | 0.0028 | −0.0015 | 0.91 | 1.03 | −0.0021 | 55 | |
| 660 | 25.93 | 0.0026 | −0.0009 | 0.89 | 1.01 | −0.0001 | 32 | |
| UV-NIR | 412 | 23.37 | 0.0022 | 0.0006 | 0.76 | 1.13 | −0.0003 | 59 |
| 443 | 16.89 | 0.0021 | 0.0004 | 0.84 | 1.06 | −0.0001 | 59 | |
| 490 | 12.95 | 0.0021 | −0.0002 | 0.87 | 1.03 | −0.0021 | 59 | |
| 555 | 13.86 | 0.0025 | −0.0012 | 0.92 | 0.99 | −0.0011 | 59 | |
| 660 | 19.53 | 0.0017 | −0.0003 | 0.93 | 0.97 | −0.0002 | 59 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, F.; Chen, J.; Mao, Z.; Han, B.; Song, Q.; Xu, Y.; Zhu, Q. A Novel Framework of Integrating UV and NIR Atmospheric Correction Algorithms for Coastal Ocean Color Remote Sensing. Remote Sens. 2021, 13, 4206. https://doi.org/10.3390/rs13214206
Qiao F, Chen J, Mao Z, Han B, Song Q, Xu Y, Zhu Q. A Novel Framework of Integrating UV and NIR Atmospheric Correction Algorithms for Coastal Ocean Color Remote Sensing. Remote Sensing. 2021; 13(21):4206. https://doi.org/10.3390/rs13214206
Chicago/Turabian StyleQiao, Feng, Jianyu Chen, Zhihua Mao, Bing Han, Qingjun Song, Yuying Xu, and Qiankun Zhu. 2021. "A Novel Framework of Integrating UV and NIR Atmospheric Correction Algorithms for Coastal Ocean Color Remote Sensing" Remote Sensing 13, no. 21: 4206. https://doi.org/10.3390/rs13214206
APA StyleQiao, F., Chen, J., Mao, Z., Han, B., Song, Q., Xu, Y., & Zhu, Q. (2021). A Novel Framework of Integrating UV and NIR Atmospheric Correction Algorithms for Coastal Ocean Color Remote Sensing. Remote Sensing, 13(21), 4206. https://doi.org/10.3390/rs13214206