
Optimization of Landsat Chl-a Retrieval Algorithms in Freshwater Lakes through Classification of Optical Water Types


Abstract
:
1. Introduction
2. Materials and Methods
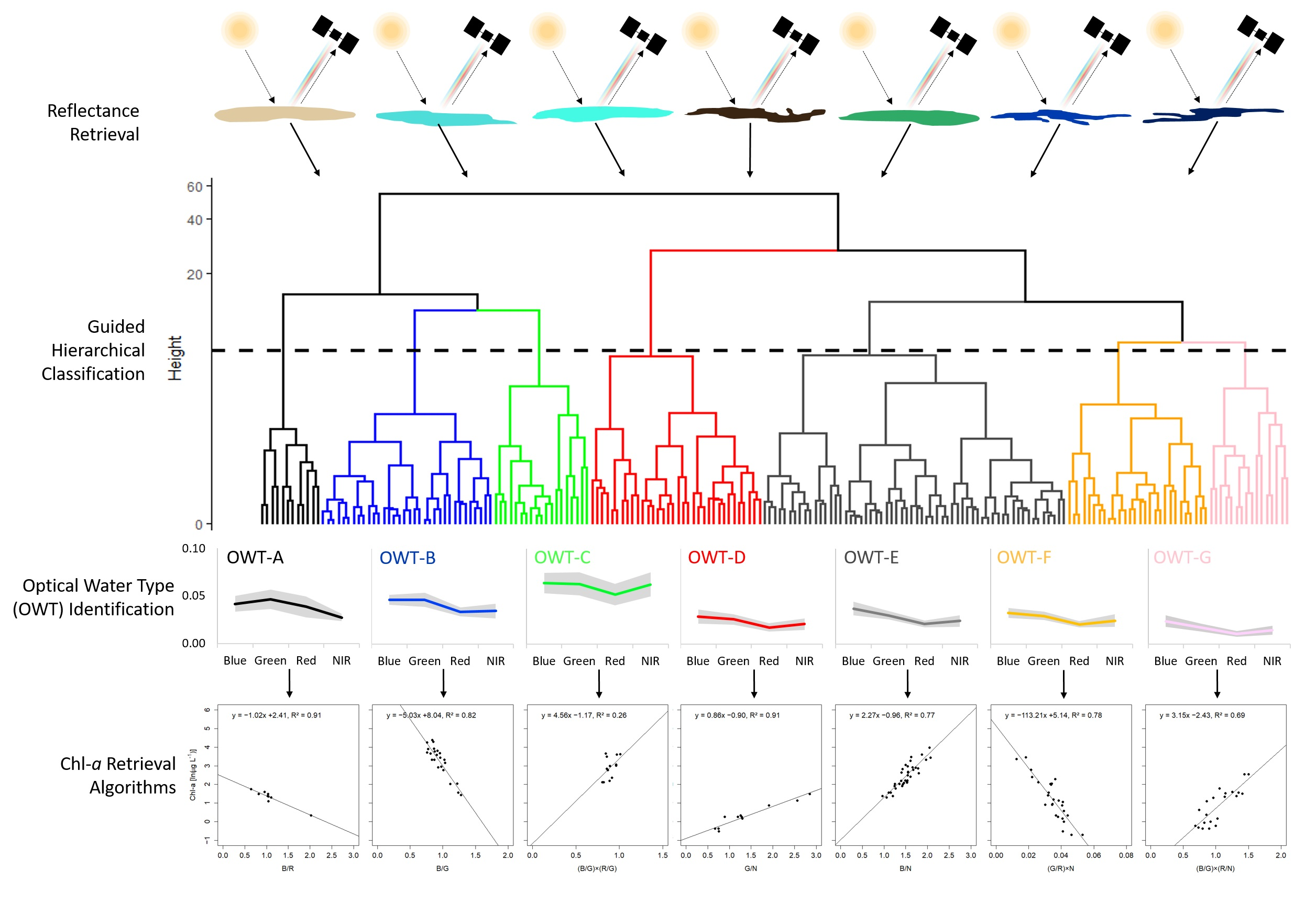
2.1. Ground-Based Dataset
2.2. Landsat Image Acquisition, Processing, and Analysis
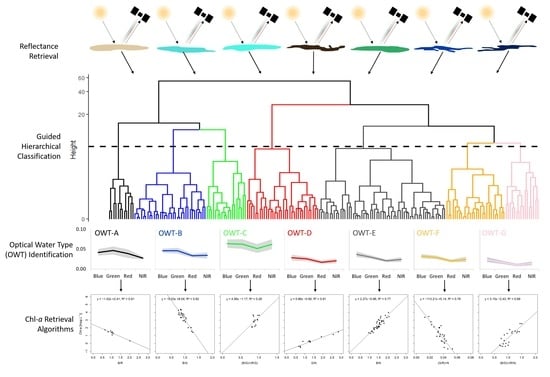
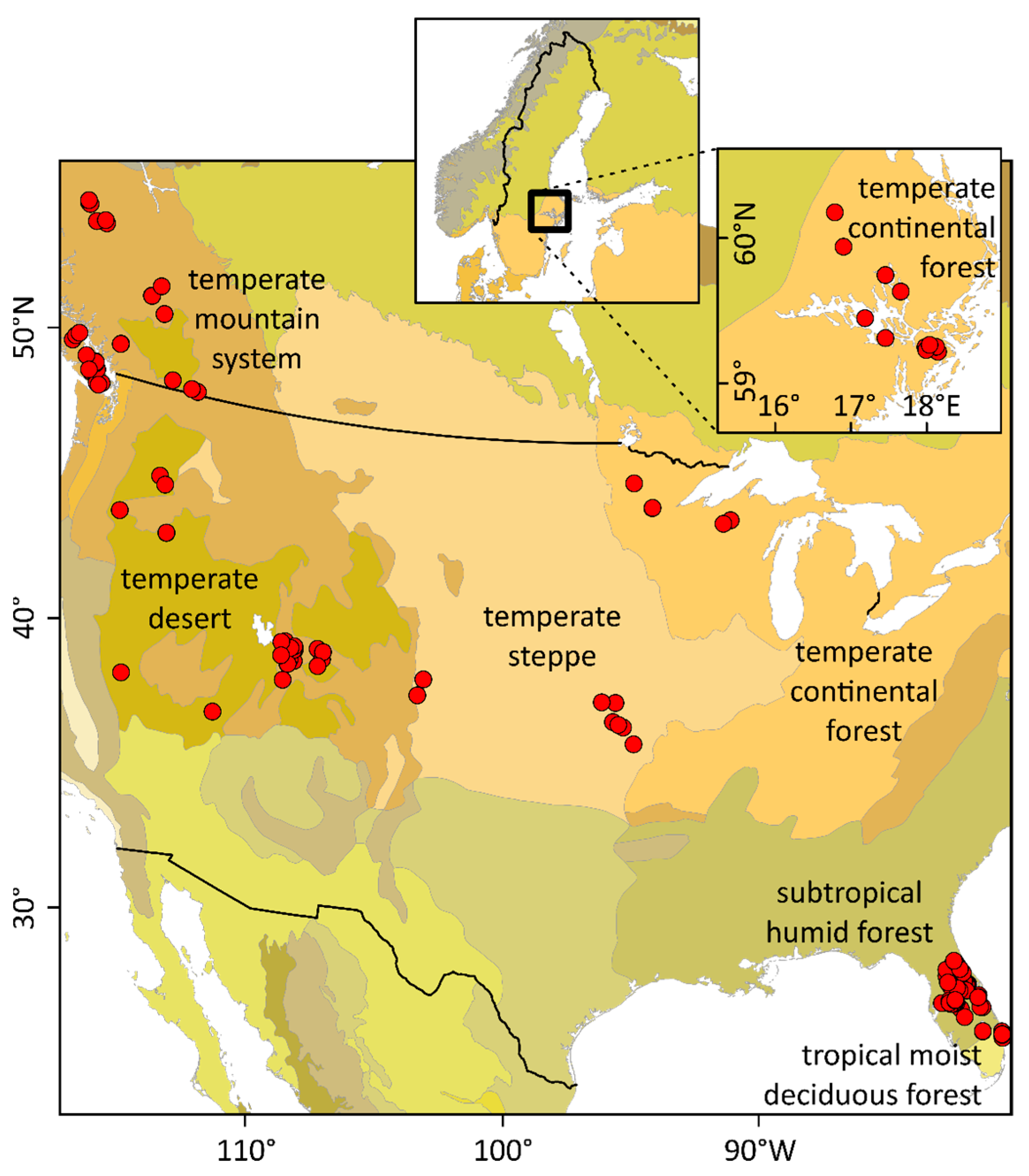
2.3. Identification of OWTs
2.4. Development of Chl-a Retrieval Algorithms
3. Results
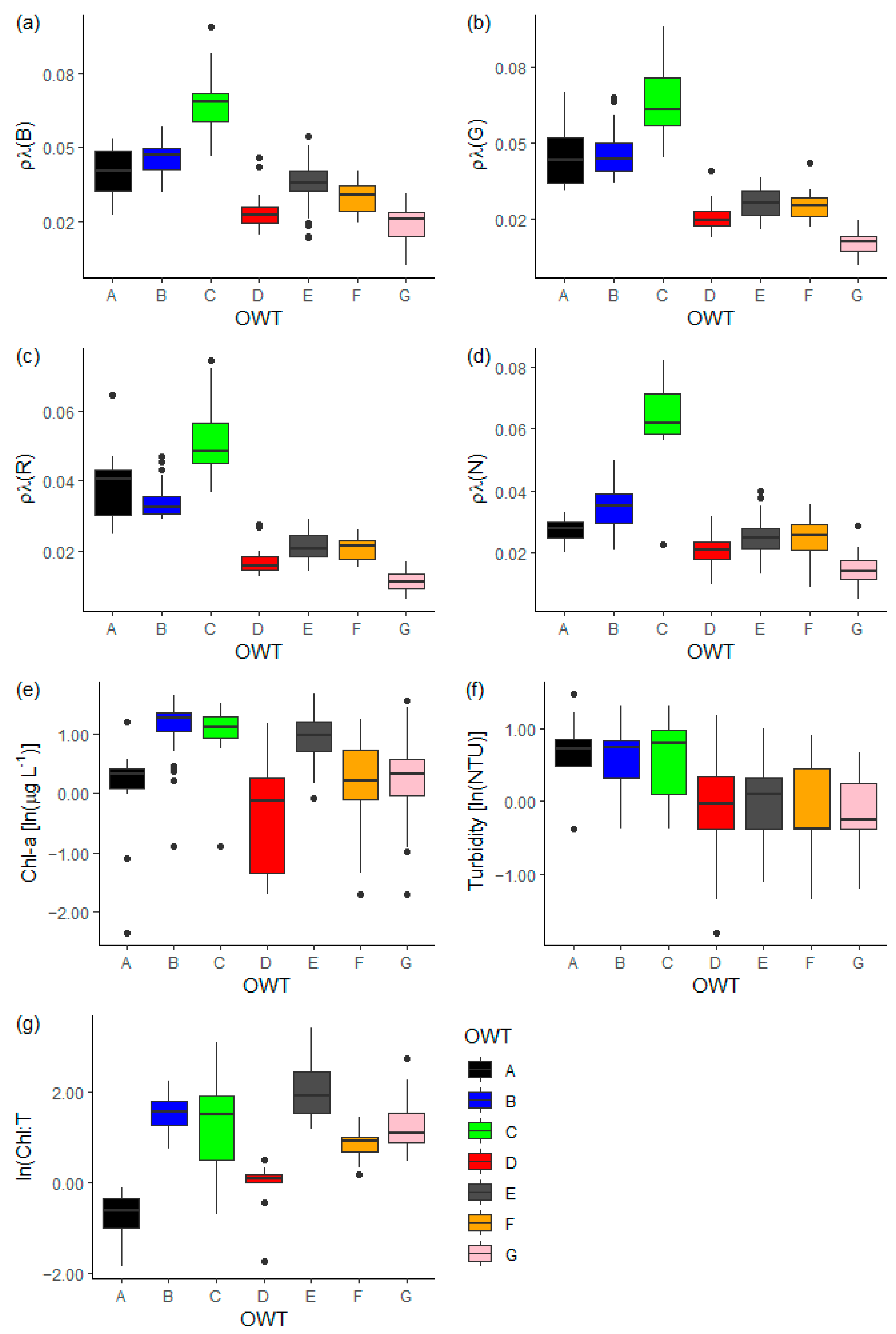
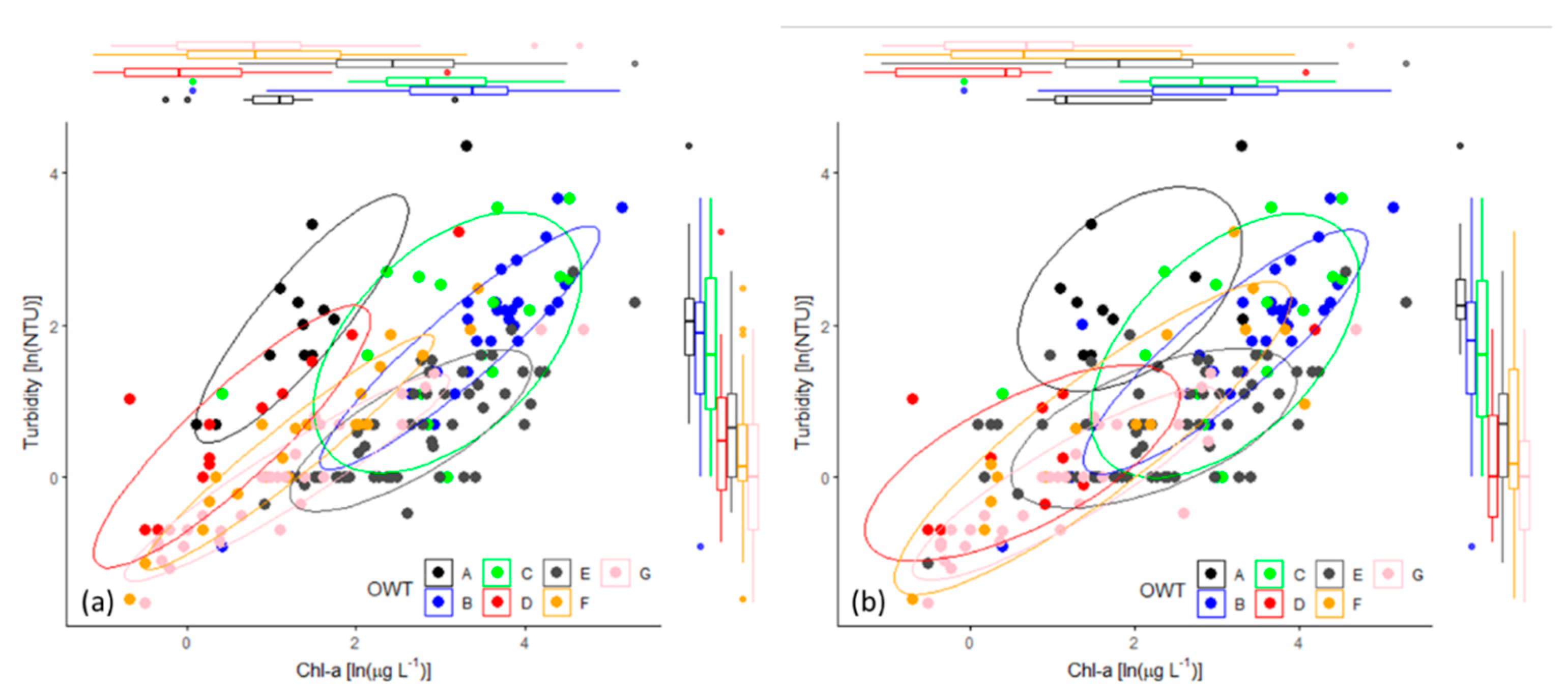
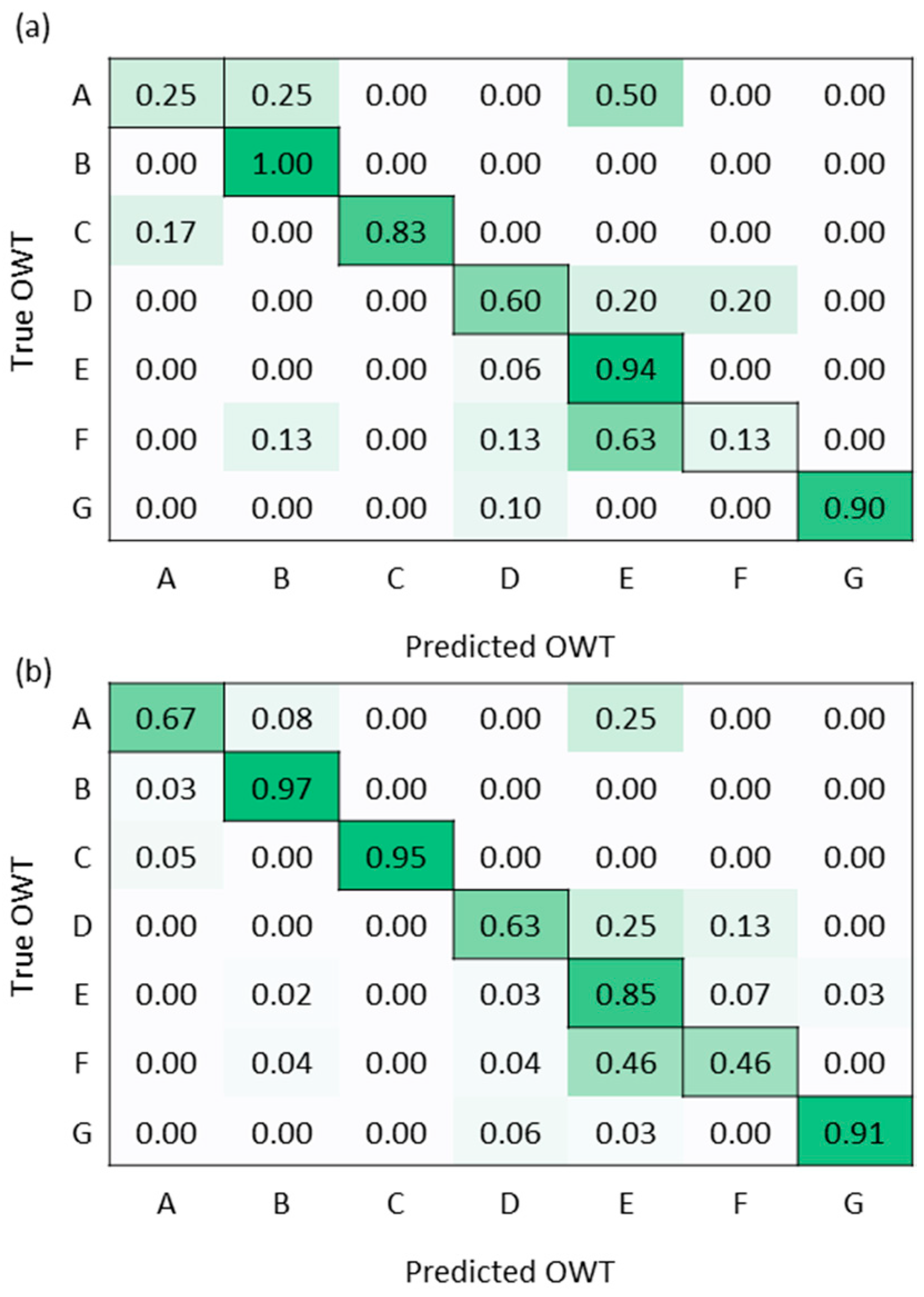
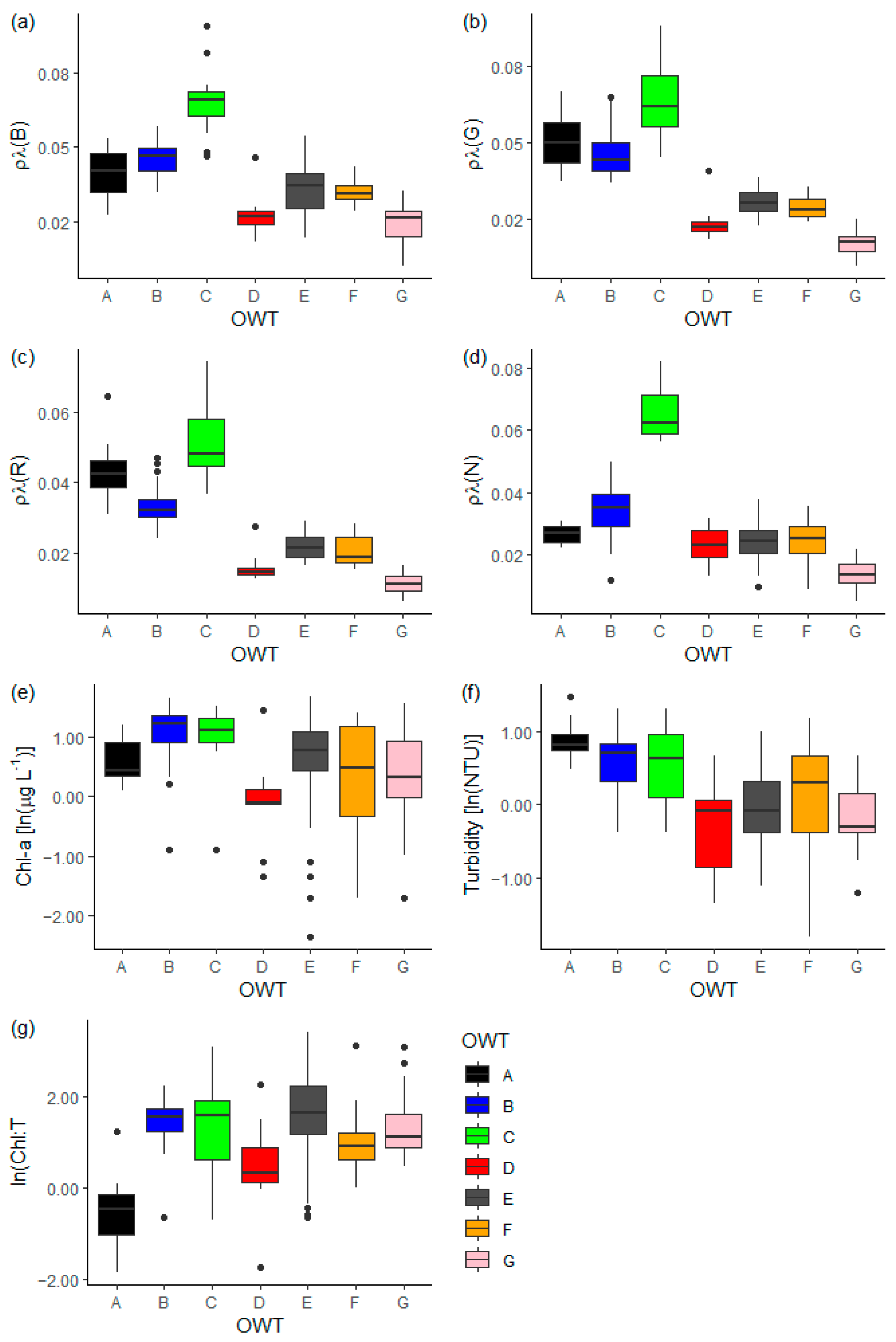
3.1. Identification of OWTs
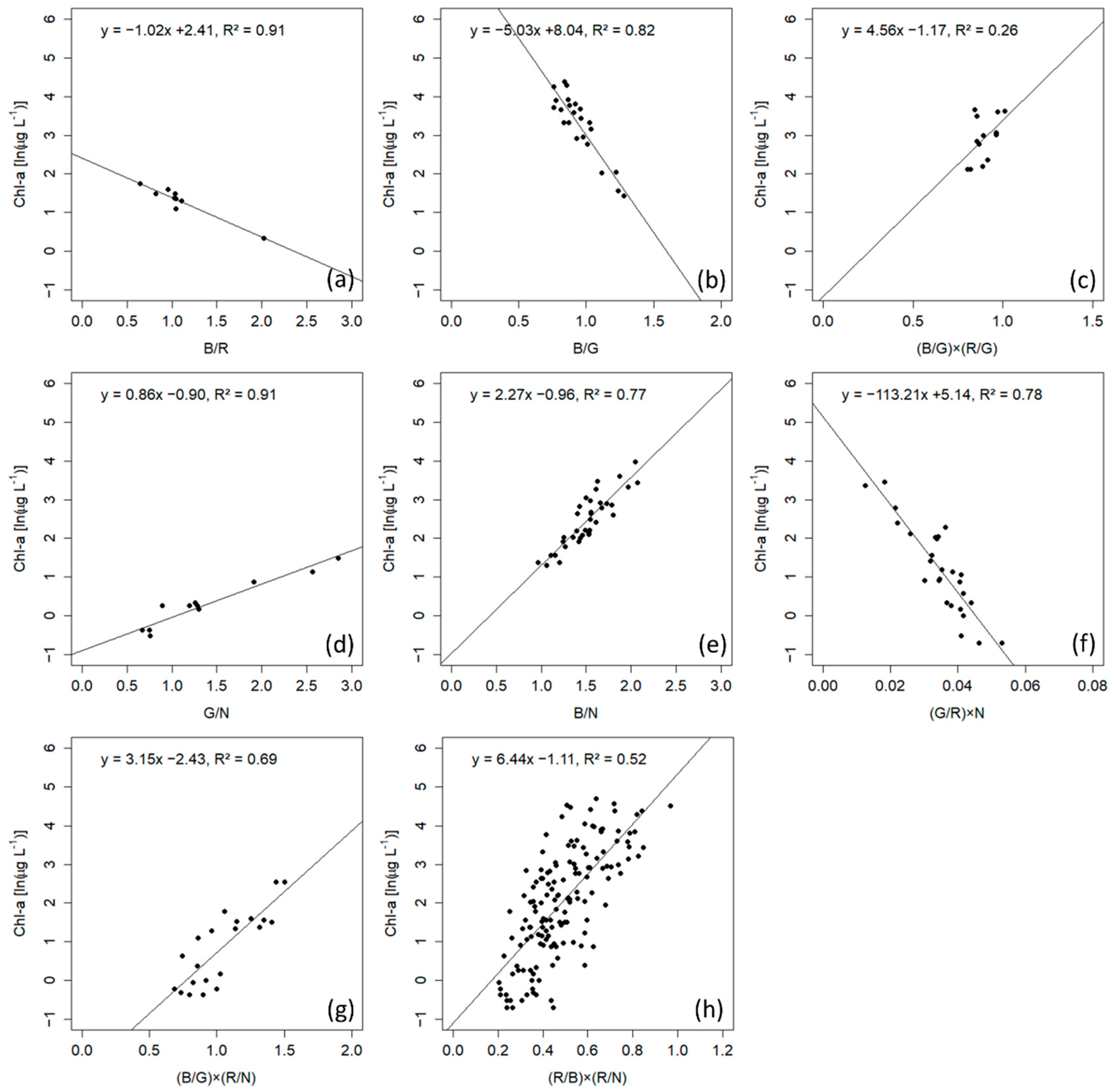
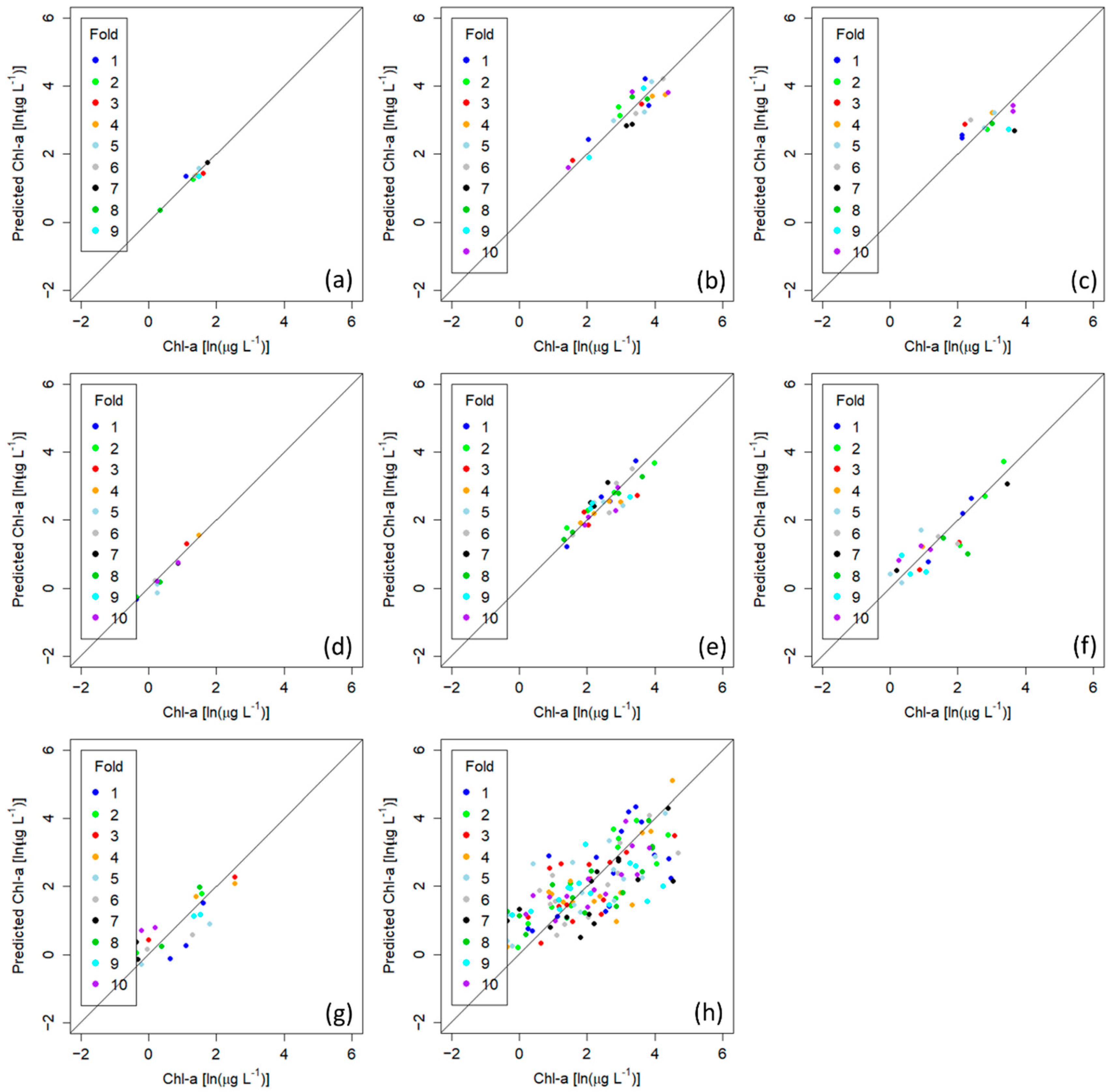
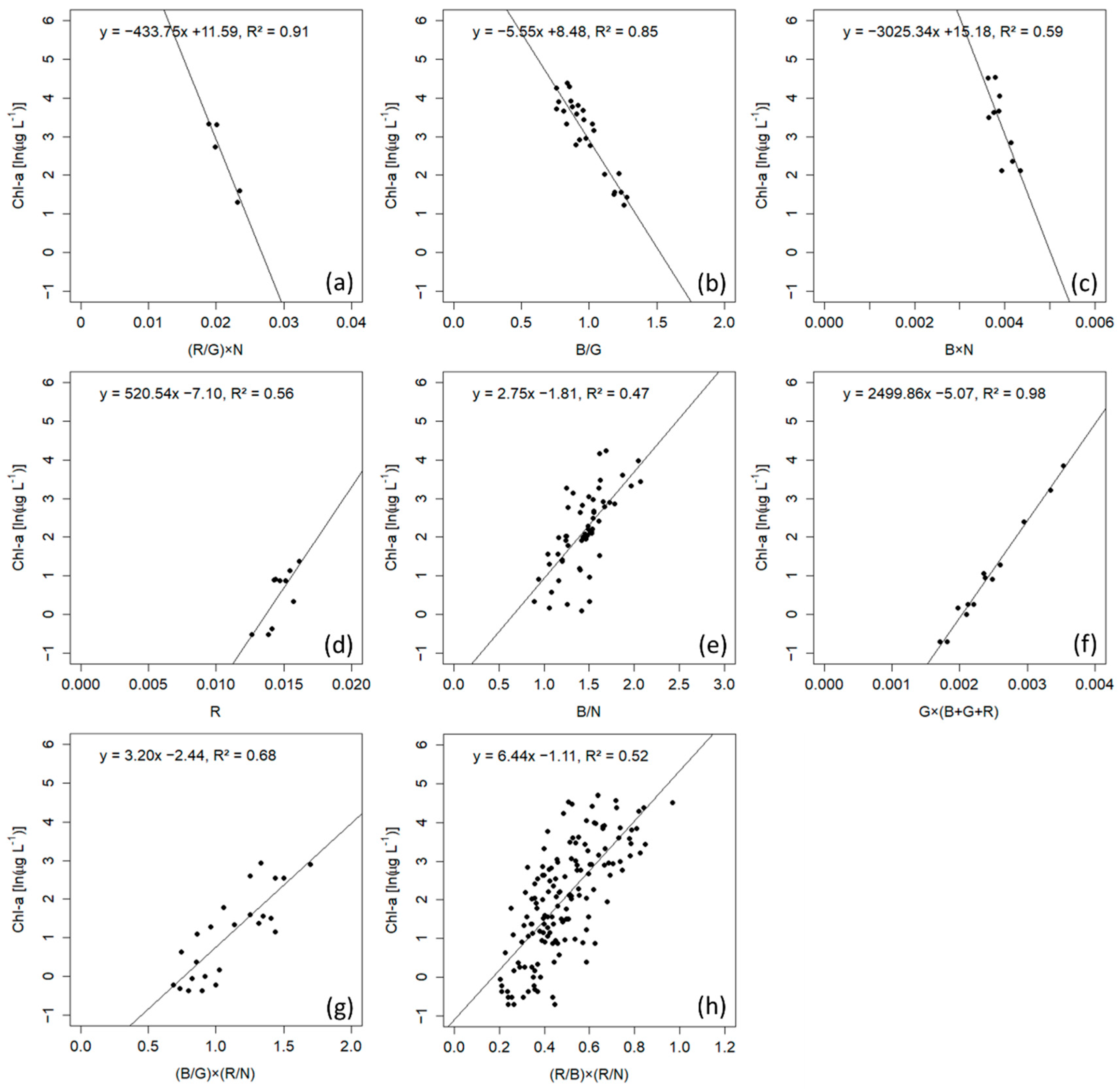
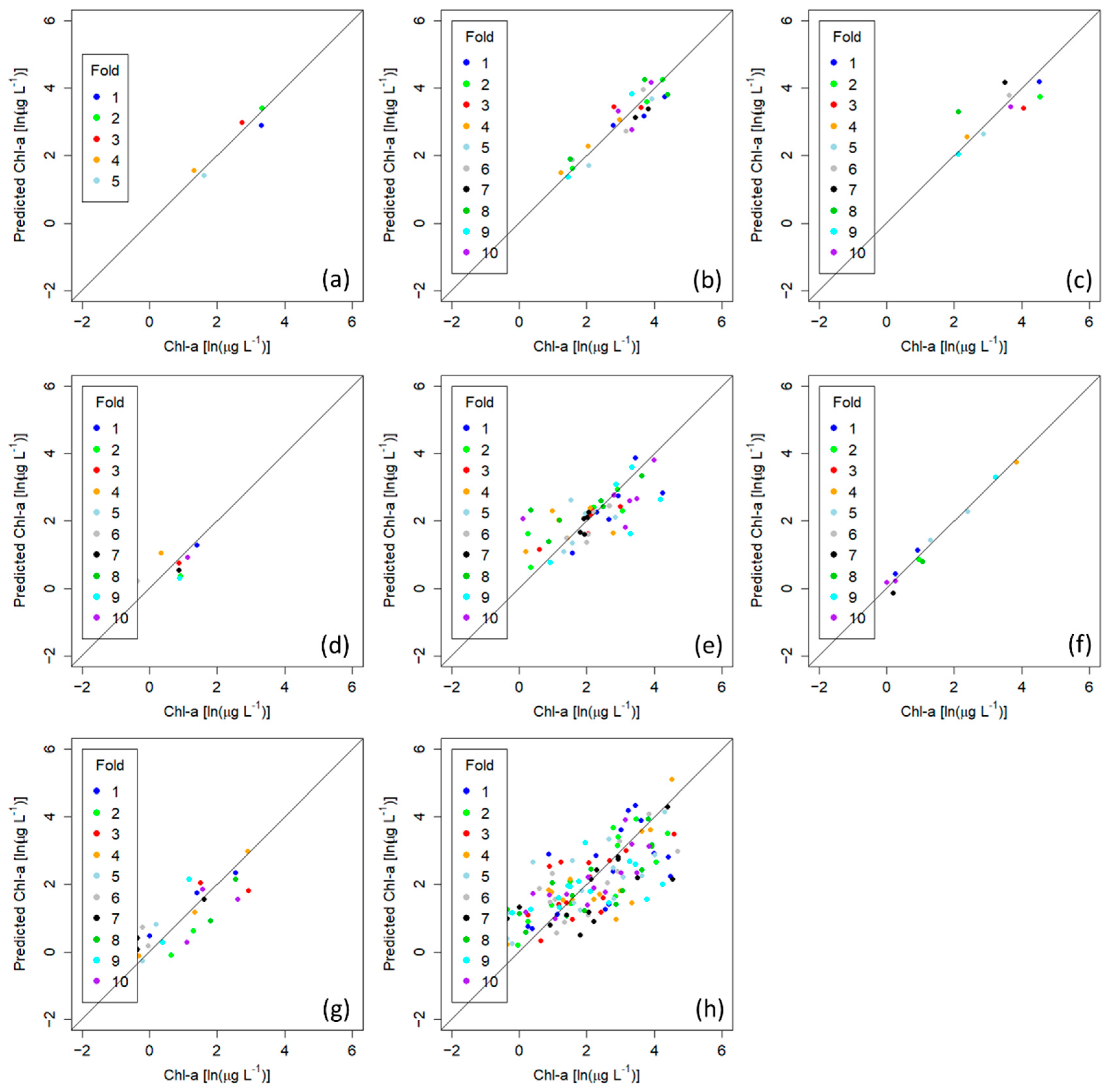
3.2. OWT Chl-a Retrieval Performance
4. Discussion
4.1. Identifying OWTs
4.2. OWT Chl-a Retrieval Performance
4.3. Comparison of Global Algorithms to OWTs
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Anderson, D. HABs in a changing world: A perspective on harmful algal blooms, their impacts, and research and management in a dynamic era of climactic and environmental change. In Harmful Algae 2012: Proceedings of the 15th International Conference on Harmful Algae: 2012, CECO, Changwon, Gyeongnam, Korea; Kim, H.-G., Reguera, B., Hallegraeff, G.M., Chang Kyu Lee, M., Eds.; NIH Public Access: Bethesda, MD, USA, 2012; Volume 2012, p. 3. [Google Scholar]
- Pick, F.R. Blooming algae: A Canadian perspective on the rise of toxic cyanobacteria. Can. J. Fish Aquat. Sci. 2016, 73, 1149–1158. [Google Scholar] [CrossRef] [Green Version]
- Winter, J.G.; DeSellas, A.M.; Fletcher, R.; Heintsch, L.; Morley, A.; Nakamoto, L.; Utsumi, K. Algal blooms in Ontario, Canada: Increases in reports since 1994. Lake Reserv. Manag. 2011, 27, 107–114. [Google Scholar] [CrossRef] [Green Version]
- Reid, A.J.; Carlson, A.K.; Creed, I.F.; Eliason, E.J.; Gell, P.A.; Johnson, P.T.; Kidd, K.A.; MacCormack, T.J.; Olden, J.D.; Ormerod, S.J.; et al. Emerging threats and persistent conservation challenges for freshwater biodiversity. Biol. Rev. 2019, 94, 849–873. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Biggs, J.; von Fumetti, S.; Kelly-Quinn, M. The importance of small waterbodies for biodiversity and ecosystem services: Implications for policy makers. Hydrobiologia 2017, 793, 3–39. [Google Scholar] [CrossRef]
- Adrian, R.; O’Reilly, C.M.; Zagarese, H.; Baines, S.B.; Hessen, D.O.; Keller, W.; Livingstone, D.M.; Sommaruga, R.; Straile, D.; Van Donk, E.; et al. Lakes as sentinels of climate change. Limnol. Oceanogr. 2009, 54, 2283–2297. [Google Scholar] [CrossRef]
- Vinnå, L.R.; Medhaug, I.; Schmid, M.; Bouffard, D. The vulnerability of lakes to climate change along an altitudinal gradient. Commun. Earth Env. 2021, 2, 1–10. [Google Scholar] [CrossRef]
- Suthers, I.M.; Rissik, D.S.; Richardson, A. Plankton: A Guide to Their Ecology and Monitoring for Water Quality, 2nd ed.; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2019. [Google Scholar]
- Matthews, M.W. A current review of empirical procedures of remote sensing in inland and near-coastal transitional waters. Int. J. Remote Sens. 2011, 32, 6855–6899. [Google Scholar] [CrossRef]
- Ogashawara, I.; Mishra, D.R.; Gitelson, A.A. Remote Sensing of Inland Waters: Background and Current State-of-the-Art. In Bio-Optical Modeling and Remote Sensing of Inland Waters; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar] [CrossRef]
- Gower, J.F.R.; Borstad, G.A. On the potential of MODIS and MERIS for imaging chlorophyll fluorescence from space. Int. J. Remote Sens. 2004, 25, 1459–1464. [Google Scholar] [CrossRef]
- Schott, J.R.; Gerace, A.; Woodcock, C.E.; Wang, S.; Zhu, Z.; Wynne, R.H.; Blinn, C.E. The impact of improved signal-to-noise ratios on algorithm performance: Case studies for Landsat class instruments. Remote Sens. Environ. 2016, 185, 37–45. [Google Scholar] [CrossRef] [Green Version]
- Boland, D.H.P. Trophic classification of lakes using Landsat-1 (ERTS-1) multispectral scanner data. U.S. In Environmental Protection Agency, Assessment and Criteria Development Division Corvallis Environmental Research Laboratory; National Technical Information Service (NTIS): Springfield, VA, USA, 1975. [Google Scholar]
- Almanza, E.; Melack, J.M. Chlorophyll differences in Mono Lake (California) observable on Landsat imagery. Hydrobiologia 1985, 122, 13–17. [Google Scholar] [CrossRef]
- Ritchie, J.C.; Cooper, C.M.; Schiebe, F.R. The relationship of MSS and TM digital data with suspended sediments, chlorophyll, and temperature in Moon Lake, Mississippi. Remote Sens. Environ. 1990, 33, 137–148. [Google Scholar] [CrossRef]
- Mayo, M.; Gitelson, A.; Yacobi, Y.Z.; Ben-Avraham, Z. Chlorophyll distribution in lake Kinneret determined from Landsat Thematic Mapper data. Int. J. Remote Sens. 1995, 16, 175–182. [Google Scholar] [CrossRef]
- Brivio, P.A.; Giardino, C.; Zilioli, E. Determination of chlorophyll concentration changes in Lake Garda using an image-based radiative transfer code for Landsat TM images. Int. J. Remote Sens. 2001, 22, 487–502. [Google Scholar] [CrossRef]
- Duan, H.; Zhang, Y.; Zhang, B.; Song, K.; Wang, Z. Assessment of chlorophyll-a concentration and trophic state for Lake Chagan using Landsat TM and field spectral data. Environ. Monit. Assess. 2007, 129, 295–308. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Wen, Z.; Xiao, Z. Spectral geometric triangle properties of chlorophyll-a inversion in Taihu Lake based on TM data. J. Water Resour. Prot. 2011, 3, 67–75. [Google Scholar] [CrossRef] [Green Version]
- Theologou, I.; Patelaki, M.; Karantzalos, K. Can single empirical algorithms accurately predict inland shallow water quality status from high resolution, multi-sensor, multi-temporal satellite data? Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 1511. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Huang, M.; Bai, K.; Li, X. An Optimal Two Bands Ratio Model to Monitor Chlorophyll-a in Urban Lake Using Landsat 8 Data. In E3S Web of Conferences; EDP Sciences: Les Ulis, France, 2020; Volume 143, p. 02003. [Google Scholar]
- Paltsev, A.; Creed, I.F. Are Northern Lakes in Relatively Intact Temperate Forests Showing Signs of Increasing Phytoplankton Biomass? Ecosystems 2021, 1–29. [Google Scholar] [CrossRef]
- Carder, K.L.; Chen, F.R.; Cannizzaro, J.P.; Campbell, J.W.; Mitchell, B.G. Performance of the MODIS semi-analytical ocean color algorithm for chlorophyll-a. Adv. Space Res. 2004, 33, 1152–1159. [Google Scholar] [CrossRef]
- O’Reilly, J.E.; Maritorena, S.; Mitchell, B.G.; Siegel, D.A.; Carder, K.L.; Garver, S.A.; Kahru, M.; McClain, C. Ocean color chlorophyll algorithms for SeaWiFS. J. Geophys. Res.-Oceans. 1998, 103, 24937–24953. [Google Scholar] [CrossRef] [Green Version]
- Salem, S.I.; Higa, H.; Kim, H.; Kobayashi, H.; Oki, K.; Oki, T. Assessment of chlorophyll-a algorithms considering different trophic statuses and optimal bands. Sensors 2017, 17, 1746. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sudheer, K.P.; Chaubey, I.; Garg, V. Lake water quality assessment from Landsat thematic mapper data using neural network: An approach to optimal band combination selection. J. Am. Water Resour. Assoc. 2006, 42, 1683–1695. [Google Scholar] [CrossRef]
- Han, L.; Jordan, K. Estimating and mapping chlorophyll a concentration in Pensacola Bay, Florida using Landsat ETM data. Int. J. Remote Sens. 2005, 26, 5245–5254. [Google Scholar] [CrossRef]
- Sass, G.; Creed, I.F.; Bayley, S.E.; Devito, K.J. Understanding variation in trophic status of lakes on the Boreal Plain: A 20 year retrospective using Landsat TM imagery. Remote Sens. Environ. 2007, 109, 127–141. [Google Scholar] [CrossRef]
- Brezonik, P.; Menken, K.D.; Bauer, M. Landsat-based remote sensing of lake water quality characteristics, including chlorophyll and colored dissolved organic matter (CDOM). Lake Reserv. Manag. 2005, 21, 373–382. [Google Scholar] [CrossRef]
- Ha, N.; Thao, N.; Koike, K.; Nhuan, M. Selecting the best band ratio to estimate chlorophyll-a concentration in a tropical freshwater lake using sentinel 2A images from a case study of Lake Ba Be (Northern Vietnam). ISPRS Int. J. Geo.-Inf. 2017, 6, 290. [Google Scholar] [CrossRef]
- Moses, W.J.; Gitelson, A.A.; Berdnikov, S.; Povazhnyy, V. Estimation of chlorophyll-a concentration in case II waters using MODIS and MERIS data—successes and challenges. Environ. Res. Lett. 2009, 4, 045005. [Google Scholar] [CrossRef] [Green Version]
- Olmanson, L.G.; Brezonik, P.L.; Finlay, J.C.; Bauer, M.E. Comparison of Landsat 8 and Landsat 7 for regional measurements of CDOM and water clarity in lakes. Remote Sens. Environ. 2016, 185, 119–128. [Google Scholar] [CrossRef]
- Schalles, J.F. Optical remote sensing techniques to estimate phytoplankton chlorophyll a concentrations in coastal. In Remote Sensing of Aquatic Coastal Ecosystem Processes; Richardson, L., LeDrew, E., Eds.; Springer: Dordrecht, The Netherlands, 2006; pp. 27–79. [Google Scholar]
- Gitelson, A.A.; Schalles, J.F.; Hladik, C.M. Remote chlorophyll-a retrieval in turbid, productive estuaries: Chesapeake Bay case study. Remote Sens. Environ. 2007, 109, 464–472. [Google Scholar] [CrossRef]
- Dall’Olmo, G.; Gitelson, A.A.; Rundquist, D.C. Towards a unified approach for remote estimation of chlorophyll-a in both terrestrial vegetation and turbid productive waters. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef] [Green Version]
- Han, L.; Rundquist, D.C.; Liu, L.L.; Fraser, R.N.; Schalles, J.F. The spectral responses of algal chlorophyll in water with varying levels of suspended sediment. Int. J. Remote Sens. 1994, 15, 3707–3718. [Google Scholar] [CrossRef]
- Singh, K.; Ghosh, M.; Sharma, S.R.; Kumar, P. Blue-red-NIR model for chlorophyll-α retrieval in hypersaline-alkaline water using Landsat ETM+ sensor. IEEE J. Sel. Top. Appl. 2014, 7, 3553–3559. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef] [PubMed]
- Gitelson, A.A.; Gao, B.C.; Li, R.R.; Berdnikov, S.; Saprygin, V. Estimation of chlorophyll-a concentration in productive turbid waters using a Hyperspectral Imager for the Coastal Ocean—the Azov Sea case study. Environ. Res. Lett. 2011, 6, 024023. [Google Scholar] [CrossRef]
- Keith, D.; Rover, J.; Green, J.; Zalewsky, B.; Charpentier, M.; Thursby, G.; Bishop, J. Monitoring algal blooms in drinking water reservoirs using the Landsat-8 operational land imager. Int. J. Remote Sens. 2018, 39, 2818–2846. [Google Scholar] [CrossRef] [PubMed]
- Lin, S.; Qi, J.; Jones, J.R.; Stevenson, R.J. Effects of sediments and coloured dissolved organic matter on remote sensing of chlorophyll-a using Landsat TM/ETM+ over turbid waters. Int. J. Remote Sens. 2018, 39, 1421–1440. [Google Scholar] [CrossRef]
- Lymburner, L.; Botha, E.; Hestir, E.; Anstee, J.; Sagar, S.; Dekker, A.; Malthus, T. Landsat 8: Providing continuity and increased precision for measuring multi-decadal time series of total suspended matter. Remote Sens. Environ. 2016, 185, 108–118. [Google Scholar] [CrossRef]
- Ma, J.; Song, K.; Wen, Z.; Zhao, Y.; Shang, Y.; Fang, C.; Du, J. Spatial distribution of diffuse attenuation of photosynthetic active radiation and its main regulating factors in Inland Waters of Northeast China. Remote Sens. 2016, 8, 964. [Google Scholar] [CrossRef] [Green Version]
- Moore, T.S.; Campbell, J.W.; Feng, H. A fuzzy logic classification scheme for selecting and blending satellite ocean color algorithms. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1764–1776. [Google Scholar] [CrossRef]
- Moore, T.S.; Campbell, J.W.; Dowell, M.D. A class-based approach to characterizing and mapping the uncertainty of the MODIS ocean chlorophyll product. Remote Sens. Environ. 2009, 113, 2424–2430. [Google Scholar] [CrossRef]
- Jackson, T.; Sathyendranath, S.; Mélin, F. An improved optical classification scheme for the Ocean Colour Essential Climate Variable and its applications. Remote Sens. Environ. 2017, 203, 152–161. [Google Scholar] [CrossRef]
- Spyrakos, E.; O’Donnell, R.; Hunter, P.D.; Miller, C.; Scott, M.; Simis, S.G.H.; Tyler, A.N. Optical types of inland and coastal waters. Limnol. Oceanogr. 2018, 63, 846–870. [Google Scholar] [CrossRef] [Green Version]
- Moore, T.S.; Dowell, M.D.; Bradt, S.; Verdu, A.R. An optical water type framework for selecting and blending retrievals from bio-optical algorithms in lakes and coastal waters. Remote Sens. Environ. 2014, 143, 97–111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tarabalka, Y.; Chanussot, J.; Benediktsson, J.A. Segmentation and classification of hyperspectral images using watershed transformation. Pattern Recognit. 2010, 43, 2367–2379. [Google Scholar] [CrossRef] [Green Version]
- Olmanson, L.G.; Bauer, M.E.; Brezonik, P.L. A 20-year landsat water clarity census of Minnesota’s 10,000 lakes. Remote Sens. Environ. 2008, 112, 4086–4097. [Google Scholar] [CrossRef]
- Siegel, D.A.; Wang, M.; Maritorena, S.; Robinson, W. Atmospheric correction of satellite ocean color imagery: The black pixel assumption. Appl. Opt. 2000, 39, 3582. [Google Scholar] [CrossRef]
- Ilori, C.O.; Pahlevan, N.; Knudby, A. Analyzing performances of different atmospheric correction techniques for Landsat 8: Application for coastal remote sensing. Remote Sens. 2019, 11, 469. [Google Scholar] [CrossRef] [Green Version]
- Bi, S.; Li, Y.; Wang, Q.; Lyu, H.; Liu, G.; Zheng, Z.; Du, C.; Mu, M.; Xu, J.; Lei, S.; et al. Inland water atmospheric correction based on turbidity classification using OLCI and SLSTR synergistic observations. Remote Sens. 2018, 10, 1002. [Google Scholar] [CrossRef] [Green Version]
- Matthews, M.W.; Bernard, S.; Robertson, L. An algorithm for detecting trophic status (chlorophyll-a), cyanobacterial-dominance, surface scums and floating vegetation in inland and coastal waters. Remote Sens. Environ. 2012, 124, 637–652. [Google Scholar] [CrossRef]
- Matthews, M.W.; Odermatt, D. Improved algorithm for routine monitoring of cyanobacteria and eutrophication in inland and near-coastal waters. Remote Sens. Environ. 2015, 156, 374–382. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, R.; Duan, H.; Loiselle, S.; Zhang, M.; Xu, J. A novel MODIS algorithm to estimate chlorophyll a concentration in eutrophic turbid lakes. Ecol. Indic. 2016, 69, 138–151. [Google Scholar] [CrossRef]
- Tao, M.; Duan, H.; Cao, Z.; Loiselle, S.A.; Ma, R. A Hybrid EOF Algorithm to Improve MODIS Cyanobacteria Phycocyanin Data Quality in a Highly Turbid Lake: Bloom and Nonbloom Condition. IEEE J. Sel. Top. Appl. 2017, 10, 4430–4444. [Google Scholar] [CrossRef]
- Pahlevan, N.; Smith, B.; Schalles, J.; Binding, C.; Cao, Z.; Ma, R.; Alikas, K.; Kangro, K.; Gurlin, D.; Hà, N.; et al. Seamless retrievals of chlorophyll-a from Sentinel-2 (MSI) and Sentinel-3 (OLCI) in inland and coastal waters: A machine-learning approach. Remote Sens. Environ. 2020, 240, 111604. [Google Scholar] [CrossRef]
- Chander, G.; Markham, B. Revised Landsat-5 TM radiometric calibration procedures and post calibration dynamic ranges. IEEE Trans. Geosci. Remote 2003, 41, 2674–2677. [Google Scholar] [CrossRef] [Green Version]
- Gilabert, M.A.; Conese, C.; Maselli, F. An atmospheric correction method for the automatic retrieval of surface reflectances from TM images. Int. J. Remote Sens. 1994, 15, 2065–2086. [Google Scholar] [CrossRef]
- Chandrasekhar, S. Radiative Transfer; Dover Publications: New York, NY, USA, 1960. [Google Scholar]
- Vermote, E.; Tanré, D.; Deuzé, J.L.; Herman, M.; Morcrette, J.J.; Kotchenova, S.Y. Second Simulation of a Satellite Signal in the Solar Spectrum-Vector (6SV); 6s User Guide Version 3; Laboratoire d’Optique Atmosphérique: Villeneuve d’Ascq, France, 2006; pp. 1–55. [Google Scholar]
- Young, A.T. Revised depolarization corrections for atmospheric extinction. Appl. Opt. 1980, 19, 3427. [Google Scholar] [CrossRef]
- Bucholtz, A. Rayleigh-scattering calculations for the terrestrial atmosphere. Appl. Opt. 1995, 34, 2765. [Google Scholar] [CrossRef]
- Bodhaine, B.A.; Wood, N.B.; Dutton, E.G.; Slusser, J.R. On Rayleigh optical depth calculations. J. Atmos. Ocean. Technol. 1999, 16, 1854–1861. [Google Scholar] [CrossRef]
- Hansen, J.E.; Travis, L.D. Light scattering in planetary atmospheres. Space Sci. Rev. 1974, 16, 527–610. [Google Scholar] [CrossRef]
- Sturm, B. The atmospheric correction of remotely sensed data and the quantitative determination of suspended matter in marine water surface layers. In Remote Sensing in Meteorology, Oceanography and Hydrology; Cracknell, A.P., Ed.; Ellis Horwood Limited: Chichester, UK, 1981; Chapter 11. [Google Scholar]
- Jorge, D.; Barbosa, C.; De Carvalho, L.; Affonso, A.G.; Lobo, F.; Novo, E. SNR (signal-to-noise ratio) impact on water constituent retrieval from simulated images of optically complex amazon lakes. Remote Sens. 2017, 9, 644. [Google Scholar] [CrossRef] [Green Version]
- Jones, J.W. Efficient wetland surface water detection and monitoring via Landsat: Comparison with in situ data from the Everglades Depth Estimation Network. Remote Sens. 2015, 7, 12503–12538. [Google Scholar] [CrossRef] [Green Version]
- DeVries, B.; Huang, C.; Lang, M.; Jones, J.; Huang, W.; Creed, I.; Carroll, M. Automated quantification of surface water inundation in wetlands using optical satellite imagery. Remote Sens. 2017, 9, 807. [Google Scholar] [CrossRef] [Green Version]
- Hou, Z.; Xu, Q.; Nuutinen, T.; Tokola, T. Remote Sensing of Environment Extraction of remote sensing-based forest management units in tropical forests. Remote Sens. Environ. 2013, 130, 1–10. [Google Scholar] [CrossRef]
- Song, Y.; Qu, J. Real time segmentation of remote sensing images with a combination of clustering and Bayesian approaches. J. Real Time Image Process. 2020, 18, 1541–1554. [Google Scholar] [CrossRef]
- da Silva, E.F.F.; de Moraes Novo, E.M.L.; de Lucia Lobo, F.; Barbosa, C.C.F.; Noernberg, M.A.; da Silva Rotta, L.H.; Cairo, C.T.; Maciel, D.A.; Júnior, R.F. Optical water types found in Brazilian waters. Limnology 2021, 22, 57–68. [Google Scholar] [CrossRef]
- Kuhn, M.; Wing, J.; Weston, S.; Williams, A.; Keefer, C.; Engelhardt, A.; Cooper, T.; Mayer, Z.; Kenkel, B.; Team, R.C.; et al. Package ‘caret’. R J. 2021, 223. Available online: https://github.com/topepo/caret/ (accessed on 3 November 2021).
- Kassambara, A.; Mundt, F. Package ‘factoextra’. Extract and Visualize the Results of Multivariate Data Analyses. 2020. Available online: http://www.sthda.com/english/rpkgs/factoextra (accessed on 3 November 2021).
- Mahto, A. Package ‘splitstackshape’. 2019. Available online: https://github.com/topepo/caret/ (accessed on 3 November 2021).
- Ripley, B.; Venables, B.; Bates, D.M.; Hornik, K.; Gebhardt, A.; Firth, D.; Ripley, M.B. Package ‘mass’. Cran R 2013, 538, 113–120. Available online: http://www.stats.ox.ac.uk/pub/MASS4/ (accessed on 3 November 2021).
- Hothorn, T.; Zeileis, A.; Farebrother, R.W.; Cummins, C.; Millo, G.; Mitchell, D.; Zeileis, M.A. Package ‘lmtest’. Testing linear regression models. Cran R 2002, 2, 7–10. Available online: https://CRAN.R-project.org/package=lmtest (accessed on 3 November 2021).
- Hamner, B.; Frasco, M.; LeDell, E. Metrics: Evaluation Metrics for Machine Learning. 2018. Available online: https://github.com/mfrasco/Metrics (accessed on 3 November 2021).
- Yan, Y. MLmetrics: Machine Learning Evaluation Metrics. 2016. Available online: http://github.com/yanyachen/MLmetrics/issues (accessed on 3 November 2021).
- Sun, D.; Li, Y.; Wang, Q.; Lv, H.; Le, C.; Huang, C.; Gong, S. Partitioning particulate scattering and absorption into contributions of phytoplankton and non-algal particles in winter in Lake Taihu (China). Hydrobiologia 2010, 644, 337–349. [Google Scholar] [CrossRef]
- Watanabe, S.; Vincent, W.F.; Reuter, J.; Hook, S.J.; Schladow, S.G. A quantitative blueness index for oligotrophic waters: Application to Lake Tahoe, California-Nevada. Limnol. Oceanogr. 2016, 14, 100–109. [Google Scholar] [CrossRef]
- Kuhn, C.; de Matos Valerio, A.; Ward, N.; Loken, L.; Sawakuchi, H.O.; Kampel, M.; Butman, D. Performance of Landsat-8 and Sentinel-2 surface reflectance products for river remote sensing retrievals of chlorophyll-a and turbidity. Remote Sens. Environ. 2019, 224, 104–118. [Google Scholar] [CrossRef] [Green Version]
- Olmanson, L.G.; Brezonik, P.L.; Bauer, M.E. Evaluation of medium to low resolution satellite imagery for regional lake water quality assessments. Water Resour. Res. 2011, 47, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Han, L. Spectral reflectance with varying suspended sediment concentrations in clear and algae-laden waters. Photogramm. Eng. Remote Sens. 1997, 63, 701–705. [Google Scholar]
- Pahlevan, N.; Balasubramanian, S.V.; Sarkar, S.; Franz, B.A. Toward long-term aquatic science products from heritage Landsat missions. Remote Sens. 2018, 10, 1337. [Google Scholar] [CrossRef] [Green Version]
- Uudeberg, K.; Ansko, I.; Põru, G.; Ansper, A.; Reinart, A. Using optical water types to monitor changes in optically complex inland and coastal waters. Remote Sens. 2019, 11, 2297. [Google Scholar] [CrossRef] [Green Version]
- Mascarenhas, V.; Keck, T. Marine Optics and Ocean Color Remote Sensing. In YOUMARES 8–Oceans across Boundaries: Learning from Each Other; Springer: Cham, Switzerland, 2019; pp. 41–54. [Google Scholar]
- Slonecker, E.T.; Jones, D.K.; Pellerin, B.A. The new Landsat 8 potential for remote sensing of colored dissolved organic matter (CDOM). Mar. Pollut. Bull. 2016, 107, 518–527. [Google Scholar] [CrossRef]
- Simis, S.G.H.; Peters, S.W.M.; Gons, H.J. Remote sensing of the cyanobacterial pigment phycocyanin in turbid inland water. Limnol. Oceanogr. 2005, 50, 237–245. [Google Scholar] [CrossRef]
- Dörnhöfer, K.; Göritz, A.; Gege, P.; Pflug, B.; Oppelt, N. Water constituents and water depth retrieval from Sentinel-2A—A first evaluation in an oligotrophic lake. Remote Sens. 2016, 8, 941. [Google Scholar] [CrossRef] [Green Version]
- Maier, P.M.; Keller, S.; Hinz, S. Deep Learning with WASI Simulation Data for Estimating Chlorophyll a Concentration of Inland Water Bodies. Remote Sens. 2021, 13, 718. [Google Scholar] [CrossRef]
- Manuel, A.; Blanco, A.C.; Tamondong, A.M.; Jalbuena, R.; Cabrera, O.; Gege, P. Optmization of Bio-Optical Model Parameters for Turbid Lake Water Quality Estimation Using Landsat 8 and WASI-2D. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 42, 67–72. [Google Scholar] [CrossRef] [Green Version]
- Ioannou, I.; Zhou, J.; Gilerson, A.; Gross, B.; Moshary, F.; Ahmed, S. New algorithm for MODIS chlorophyll fluorescence height retrieval: Performance and comparison with the current product. In Remote Sensing of the Ocean, Sea Ice, and Large Water Regions 2009; International Society for Optics and Photonics: Bellingham, WA, USA, 2009; Volume 7473, p. 747309. [Google Scholar]
- Gholizadeh, M.H.; Melesse, A.M.; Reddi, L. A comprehensive review on water quality parameters estimation using remote sensing techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef] [Green Version]
- Qi, L.; Hu, C.; Duan, H.; Barnes, B.B.; Ma, R. An EOF-based algorithm to estimate chlorophyll a concentrations in Taihu Lake from MODIS land-band measurements: Implications for near real-time applications and forecasting models. Remote Sens. 2014, 6, 10694–10715. [Google Scholar] [CrossRef] [Green Version]
- Mansaray, A.S.; Dzialowski, A.R.; Martin, M.E.; Wagner, K.L.; Gholizadeh, H.; Stoodley, S.H. Comparing PlanetScope to Landsat-8 and Sentinel-2 for Sensing Water Quality in Reservoirs in Agricultural Watersheds. Remote Sens. 2021, 13, 1847. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L. Novel spectra-derived features for empirical retrieval of water quality parameters: Demonstrations for OLI, MSI, and OLCI Sensors. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10285–10300. [Google Scholar] [CrossRef]
- Liu, H.; Lee, S.H.; Chahl, J.S. Transformation of a high-dimensional color space for material classification. J. Opt. Soc. Am. 2017, 34, 523–532. [Google Scholar] [CrossRef]
- Hieronymi, M.; Müller, D.; Doerffer, R. The OLCI Neural Network Swarm (ONNS): A bio-geo-optical algorithm for open ocean and coastal waters. Front. Mar. Sci. 2017, 4, 140. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chl-a (μg L−1) | Turbidity (NTU) | Chl:T | Mean Lake ρλ | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| OWT | Min | Med | Max | Min | Med | Max | Min | Med | Max | B | G | R | N | n | |
| Hierarchical Clustering | Ah | 1.1 | 4.0 | 27.2 | 2.0 | 7.8 | 78.0 | 0.2 | 0.5 | 0.9 | 0.042 | 0.046 | 0.039 | 0.027 | 12 |
| Bh | 1.5 | 33.6 | 171.0 | 0.4 | 6.7 | 39.0 | 2.1 | 4.8 | 9.3 | 0.046 | 0.046 | 0.034 | 0.035 | 34 | |
| Ch | 1.5 | 20.2 | 92.3 | 1.0 | 5.0 | 39.0 | 0.5 | 4.5 | 21.5 | 0.064 | 0.063 | 0.052 | 0.063 | 19 | |
| Dh | 0.5 | 1.3 | 24.9 | 0.4 | 1.7 | 25.0 | 0.2 | 1.1 | 1.7 | 0.029 | 0.026 | 0.017 | 0.021 | 16 | |
| Eh | 2.5 | 13.7 | 200.0 | 0.6 | 1.9 | 15.0 | 3.2 | 6.7 | 30.2 | 0.037 | 0.030 | 0.021 | 0.024 | 60 | |
| Fh | 0.5 | 3.0 | 31.4 | 0.2 | 1.2 | 12.0 | 1.2 | 2.5 | 4.2 | 0.033 | 0.030 | 0.021 | 0.025 | 28 | |
| Gh | 0.6 | 3.0 | 108.5 | 0.2 | 1.0 | 7.0 | 1.6 | 3.0 | 15.5 | 0.024 | 0.017 | 0.011 | 0.015 | 34 | |
| QDA | Aq | 3.0 | 4.7 | 27.7 | 5.0 | 9.5 | 78.0 | 0.2 | 0.6 | 3.5 | 0.042 | 0.051 | 0.043 | 0.027 | 10 |
| Bq | 1.5 | 29.3 | 171.0 | 0.4 | 6.0 | 39.0 | 0.5 | 4.8 | 9.3 | 0.046 | 0.046 | 0.034 | 0.034 | 36 | |
| Cq | 1.5 | 20.9 | 92.3 | 1.0 | 5.0 | 39.0 | 0.5 | 4.9 | 21.5 | 0.065 | 0.064 | 0.052 | 0.065 | 18 | |
| Dq | 0.5 | 2.4 | 66.0 | 0.4 | 1.0 | 7.0 | 0.2 | 1.4 | 9.4 | 0.027 | 0.024 | 0.016 | 0.023 | 15 | |
| Eq | 0.6 | 8.4 | 200.0 | 0.3 | 2.0 | 15.0 | 0.5 | 5.1 | 30.2 | 0.036 | 0.031 | 0.022 | 0.024 | 72 | |
| Fq | 0.5 | 2.9 | 58.7 | 0.2 | 1.2 | 25.0 | 1.0 | 2.5 | 22.6 | 0.035 | 0.029 | 0.021 | 0.025 | 19 | |
| Gq | 0.6 | 3.0 | 108.5 | 0.2 | 1.0 | 7.0 | 1.6 | 3.0 | 21.7 | 0.025 | 0.017 | 0.011 | 0.014 | 33 | |
| OWT-Chl:T + Ref | B | G | R | N | OWT-QDA | B | G | R | N |
|---|---|---|---|---|---|---|---|---|---|
| Ah | 7 | 5 | 5 | 4 | Aq | 3 | 6 | 8 | 10 |
| Bh | 8 | 7 | 6 | 8 | Bq | 8 | 8 | 8 | 6 |
| Ch | 8 | 10 | 6 | 2 | Cq | 10 | 8 | 3 | 3 |
| Dh | 4 | 7 | 5 | 10 | Dq | 5 | 8 | 7 | 5 |
| Eh | 7 | 4 | 8 | 9 | Eq | 10 | 4 | 8 | 7 |
| Fh | 3 | 3 | 8 | 10 | Fq | 6 | 6 | 10 | 8 |
| Gh | 5 | 4 | 6 | 10 | Gq | 4 | 3 | 8 | 10 |
| OWT | Algorithm | r2 | Adj. r2 | p | CV | NM | n | RMSE (μg L−1) | RMSLE (μg L−1) | NRMSE | MAE (μg L−1) | MAPE (%) | Bias |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| OWT-Ah | (B/R) | 0.91 | 0.90 | ■ | ■ | ■ | 9 | NA | NA | NA | NA | 6.37% | −0.02 |
| OWT-Bh | (B/G) | 0.82 | 0.81 | ■ | ■ | ■ | 23 | 11.74 | 0.31 | 0.55 | 10.16 | 9.41% | −2.27 |
| OWT-Ch | (B/G) × (R/G) | 0.26 | 0.19 | □ | ■ | ■ | 13 | 8.43 | 0.41 | 0.73 | 8.33 | 15.02% | −2.54 |
| OWT-Dh | (G/N) | 0.91 | 0.91 | ■ | ■ | ■ | 13 | 0.24 | 0.08 | 0.21 | 0.23 | 33.28% | 0.04 |
| OWT-Eh | (B/N) | 0.77 | 0.77 | ■ | ■ | ■ | 36 | 5.83 | 0.29 | 0.54 | 4.27 | 11.21% | −0.63 |
| OWT-Fh | (G/R) × N | 0.78 | 0.77 | ■ | ■ | ■ | 27 | 3.00 | 0.38 | 0.38 | 2.27 | 39.89% | −0.51 |
| OWT-Gh | (B/G) × (R/N) | 0.69 | 0.68 | ■ | ■ | ■ | 21 | 1.61 | 0.33 | 0.46 | 1.35 | 109.99% | −0.26 |
| OWT-Aq | (R/G) × N | 0.91 | 0.87 | ■ | ■ | ■ | 5 | NA | NA | NA | NA | 11.10% | −0.39 |
| OWT-Bq | (B/G) | 0.85 | 0.84 | ■ | ■ | ■ | 26 | 11.83 | 0.34 | 0.53 | 10.07 | 11.72% | −1.55 |
| OWT-Cq | (B*N) | 0.59 | 0.54 | ■ | ■ | ■ | 10 | 17.45 | 0.43 | 0.55 | 17.45 | 14.45% | −5.39 |
| OWT-Dq | R | 0.56 | 0.50 | ■ | ■ | ■ | 10 | 0.66 | 0.23 | 0.57 | 0.66 | 70.61% | −0.15 |
| OWT-Eq | (B/N) | 0.47 | 0.46 | ■ | ■ | ■ | 56 | 8.93 | 0.58 | 0.61 | 6.40 | 21.44% | −2.75 |
| OWT-Fq | G × (B + G + R) | 0.98 | 0.98 | ■ | ■ | ■ | 13 | 0.88 | 0.10 | 0.07 | 0.87 | 33.60% | −0.29 |
| OWT-Gq | (B/G) × (R/N) | 0.68 | 0.67 | ■ | ■ | ■ | 24 | 2.84 | 0.43 | 0.51 | 2.40 | 103.92% | −1.16 |
| Global | (R/B) × (R/N) | 0.52 | 0.51 | ■ | ■ | ■ | 147 | 19.66 | 0.81 | 0.85 | 11.22 | 34.11% | −4.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dallosch, M.A.; Creed, I.F. Optimization of Landsat Chl-a Retrieval Algorithms in Freshwater Lakes through Classification of Optical Water Types. Remote Sens. 2021, 13, 4607. https://doi.org/10.3390/rs13224607
Dallosch MA, Creed IF. Optimization of Landsat Chl-a Retrieval Algorithms in Freshwater Lakes through Classification of Optical Water Types. Remote Sensing. 2021; 13(22):4607. https://doi.org/10.3390/rs13224607
Chicago/Turabian StyleDallosch, Michael A., and Irena F. Creed. 2021. "Optimization of Landsat Chl-a Retrieval Algorithms in Freshwater Lakes through Classification of Optical Water Types" Remote Sensing 13, no. 22: 4607. https://doi.org/10.3390/rs13224607
APA StyleDallosch, M. A., & Creed, I. F. (2021). Optimization of Landsat Chl-a Retrieval Algorithms in Freshwater Lakes through Classification of Optical Water Types. Remote Sensing, 13(22), 4607. https://doi.org/10.3390/rs13224607