
Mapping Relict Charcoal Hearths in New England Using Deep Convolutional Neural Networks and LiDAR Data

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
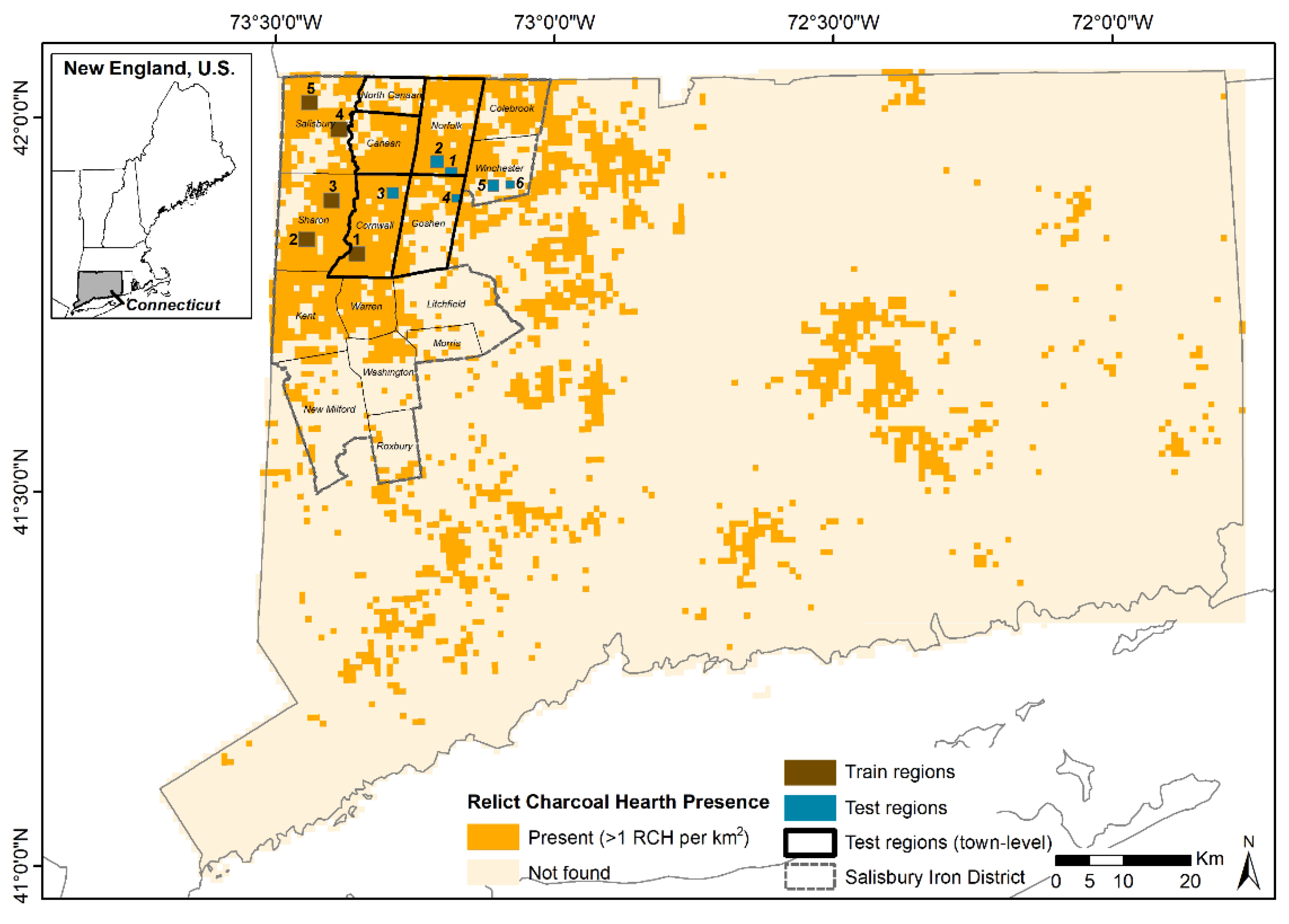
2.1. Study Area
2.2. Data Description
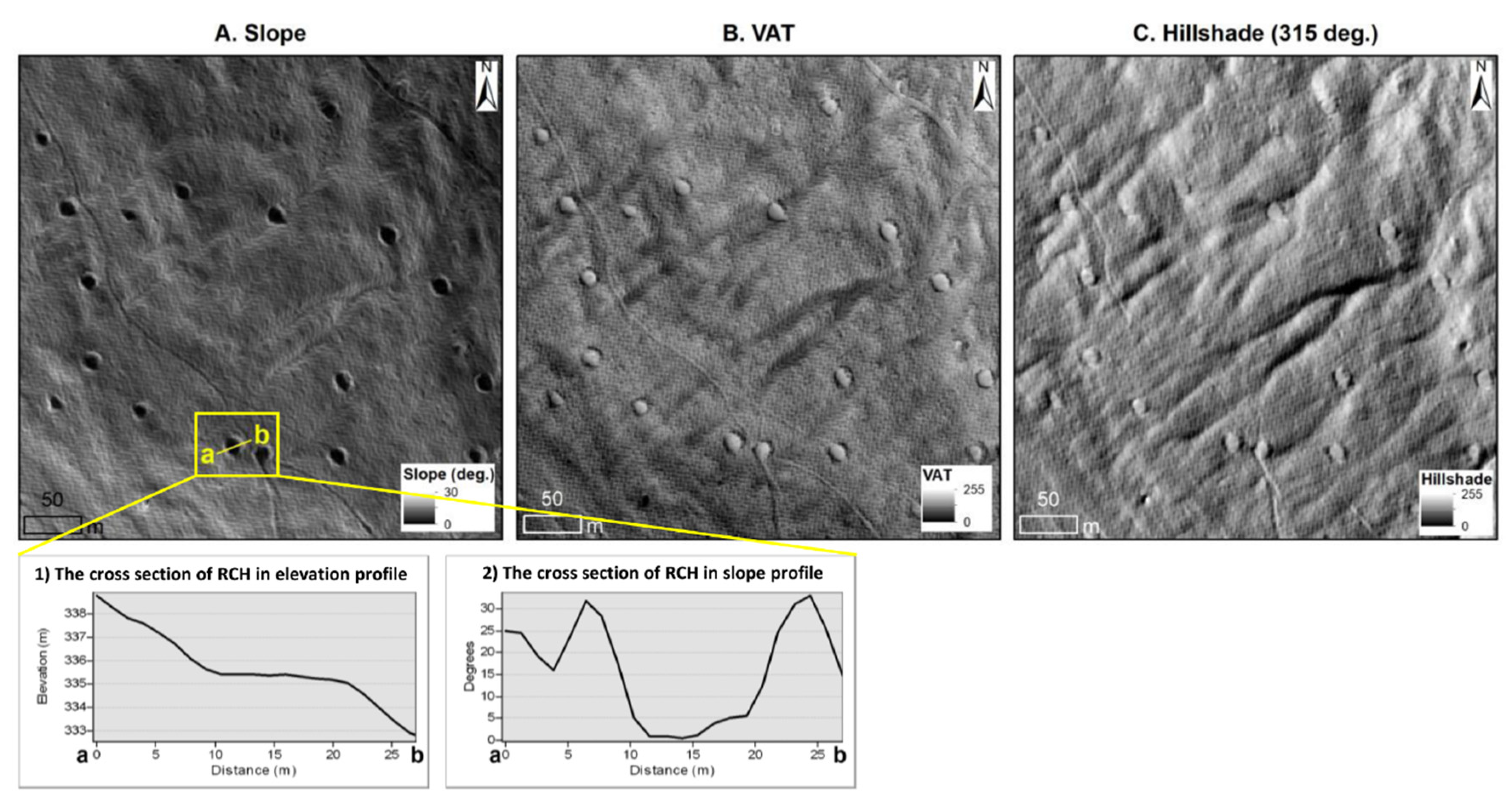
2.2.1. LiDAR Data and Derivatives
2.2.2. Reference Data
2.3. Methodology
2.3.1. Preparing Input Data for the U-Net Model
2.3.2. U-Net Model Training
2.3.3. Model Prediction
2.3.4. Post-Processing
2.3.5. Accuracy Assessment
3. Results and Discussion
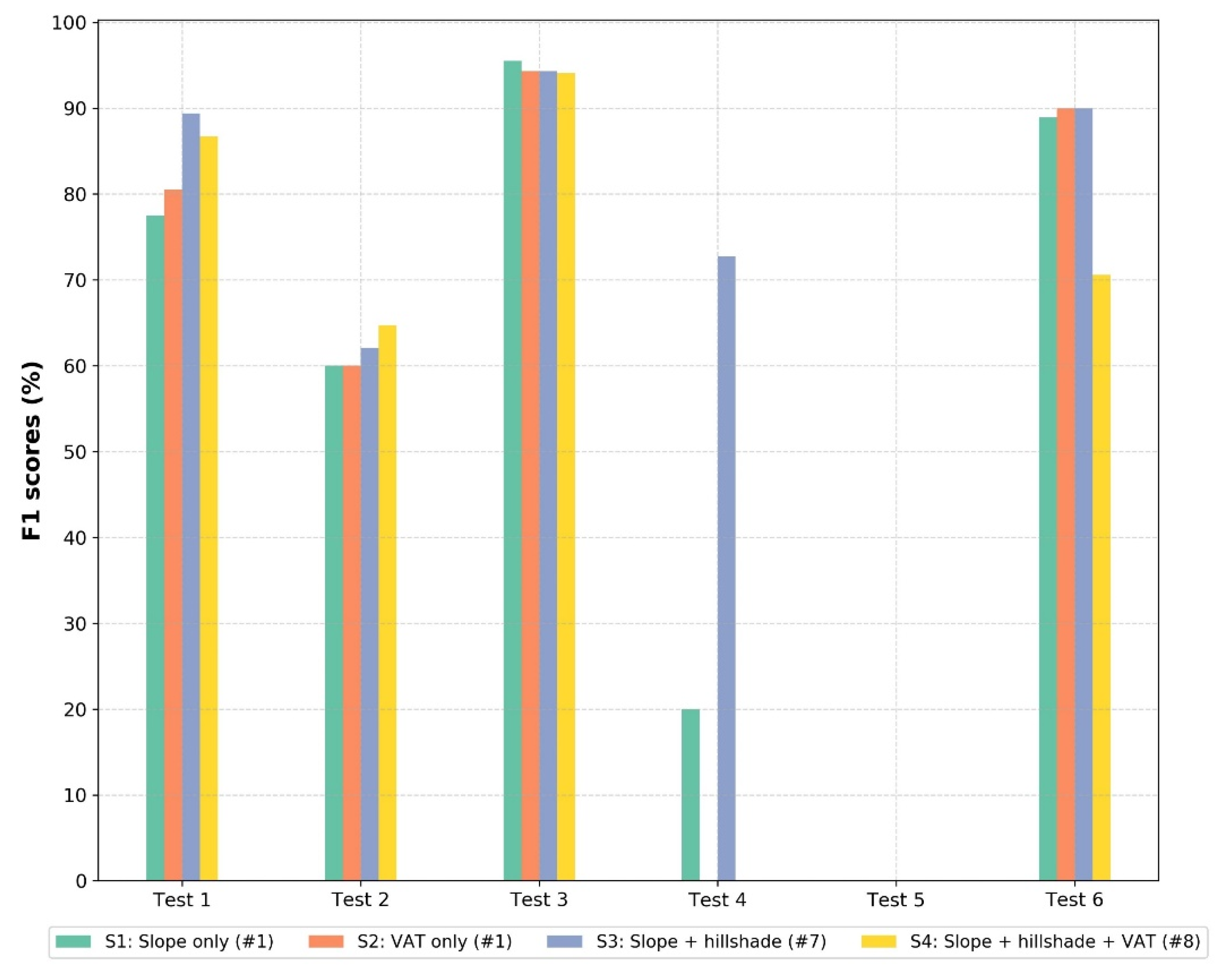
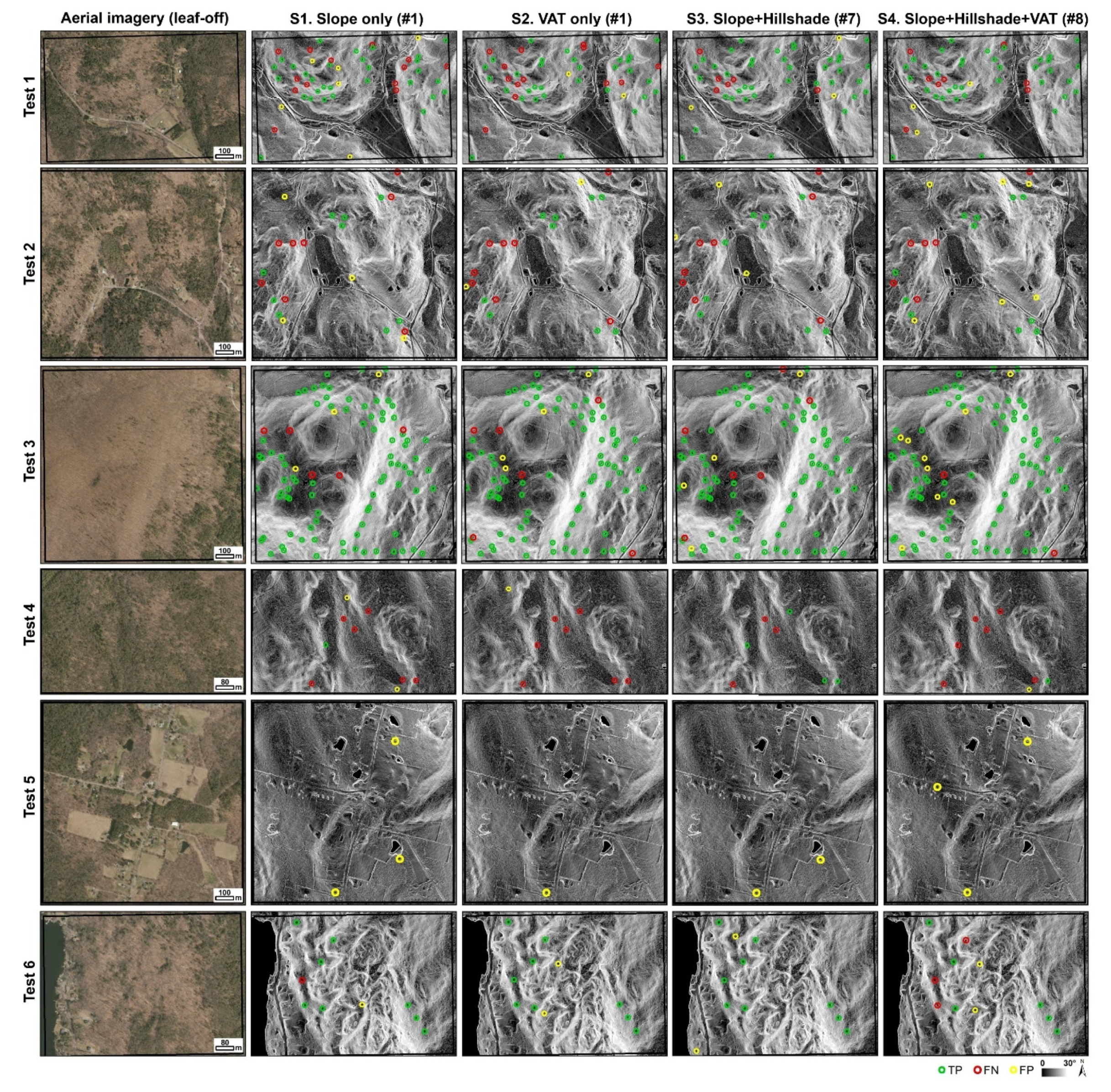
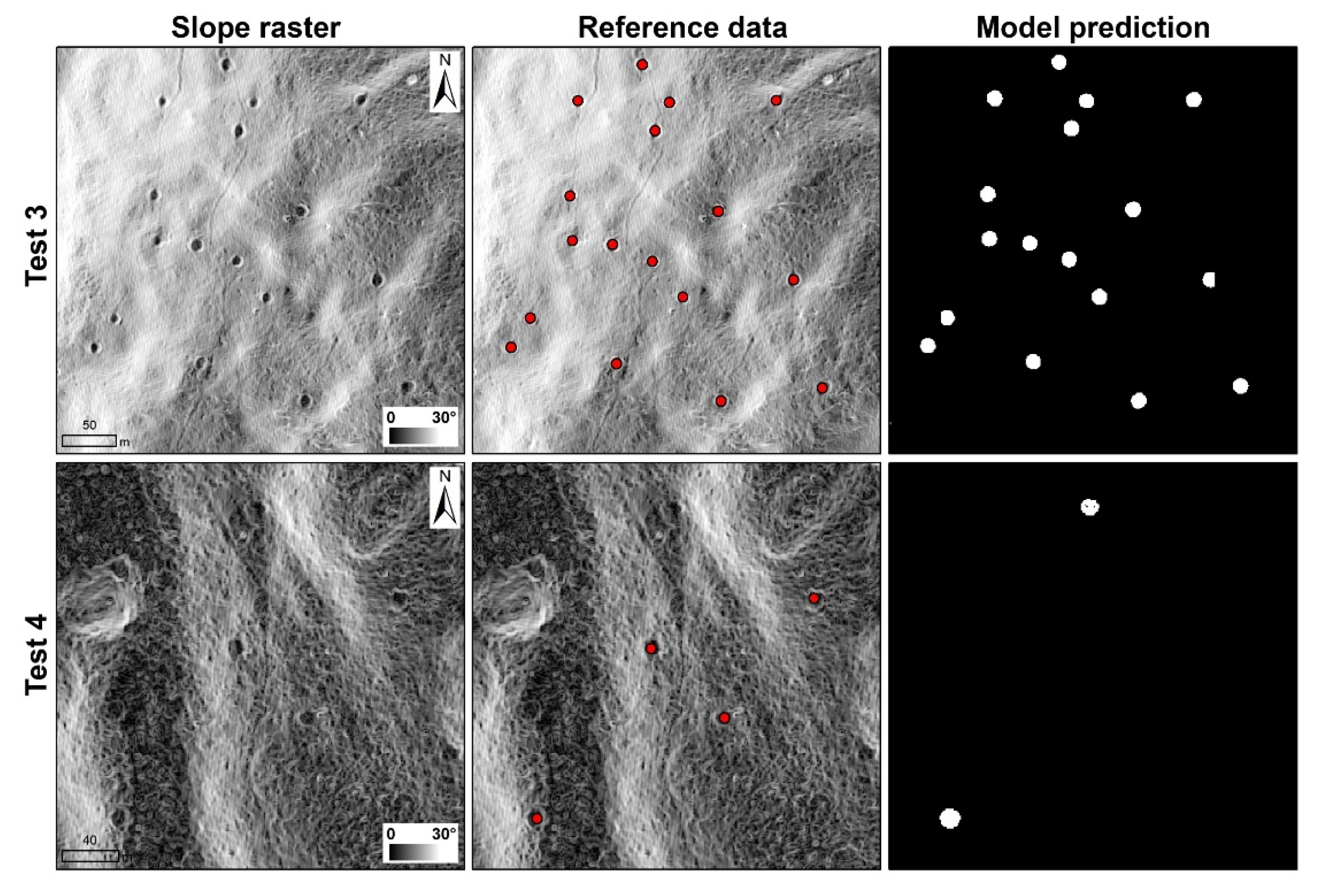
3.1. Results in the Six Test Regions
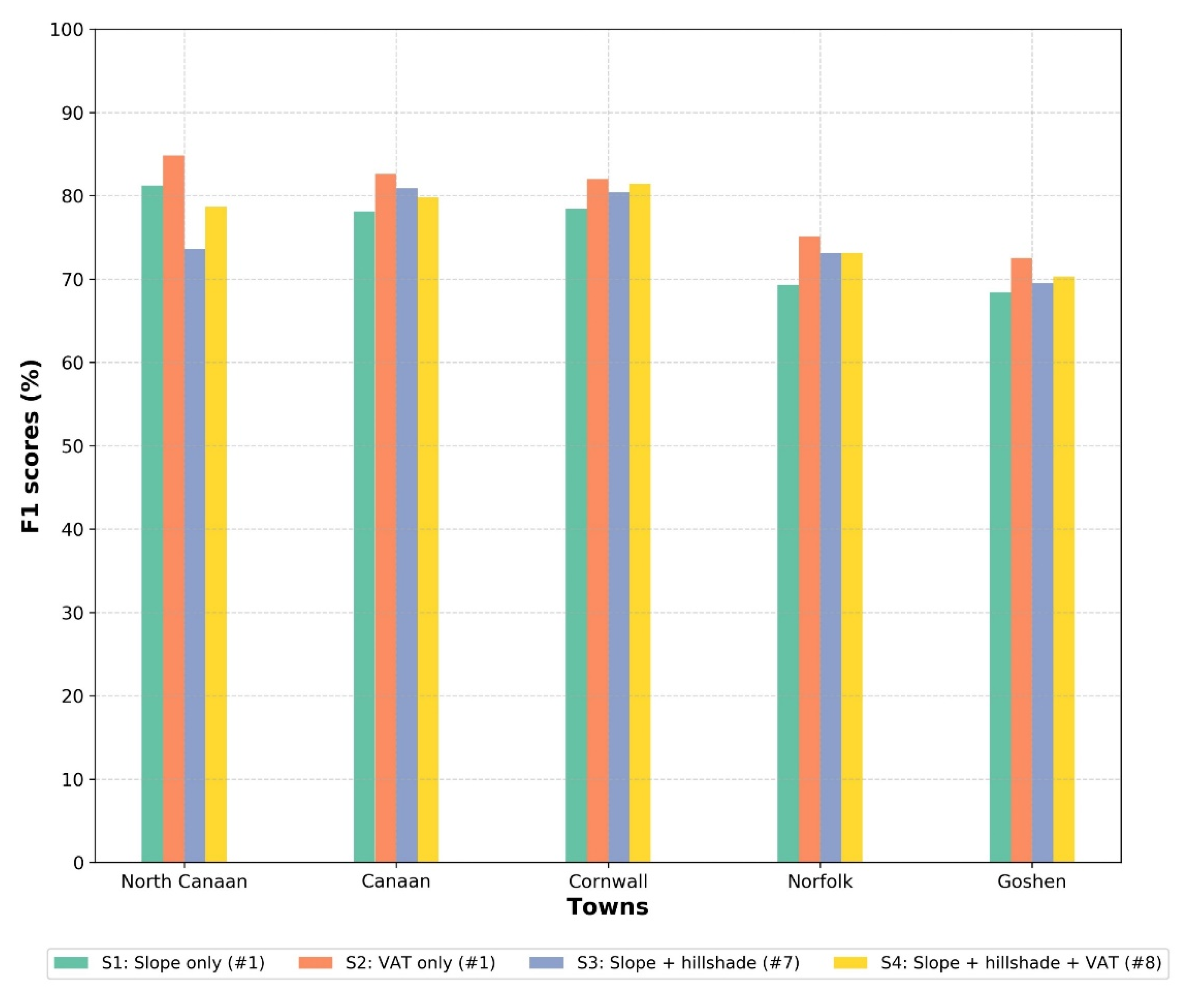
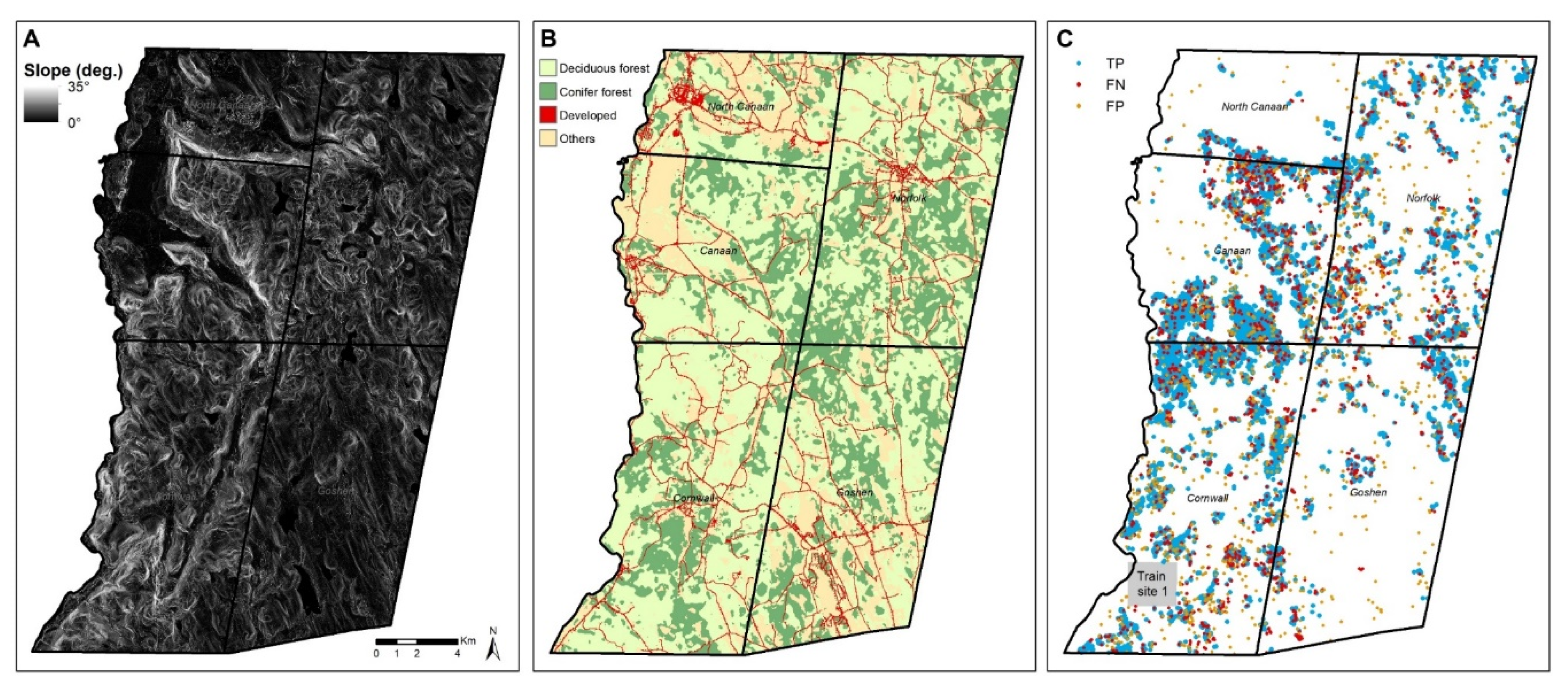
3.2. Results of Accuracy Assessment over Broad Region
3.3. Model Performance and Landscapes
3.4. Comparison of Model Performance to Previous Research
3.5. Reconstruction of Historic Land Use Using Widespread RCH Mapping
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
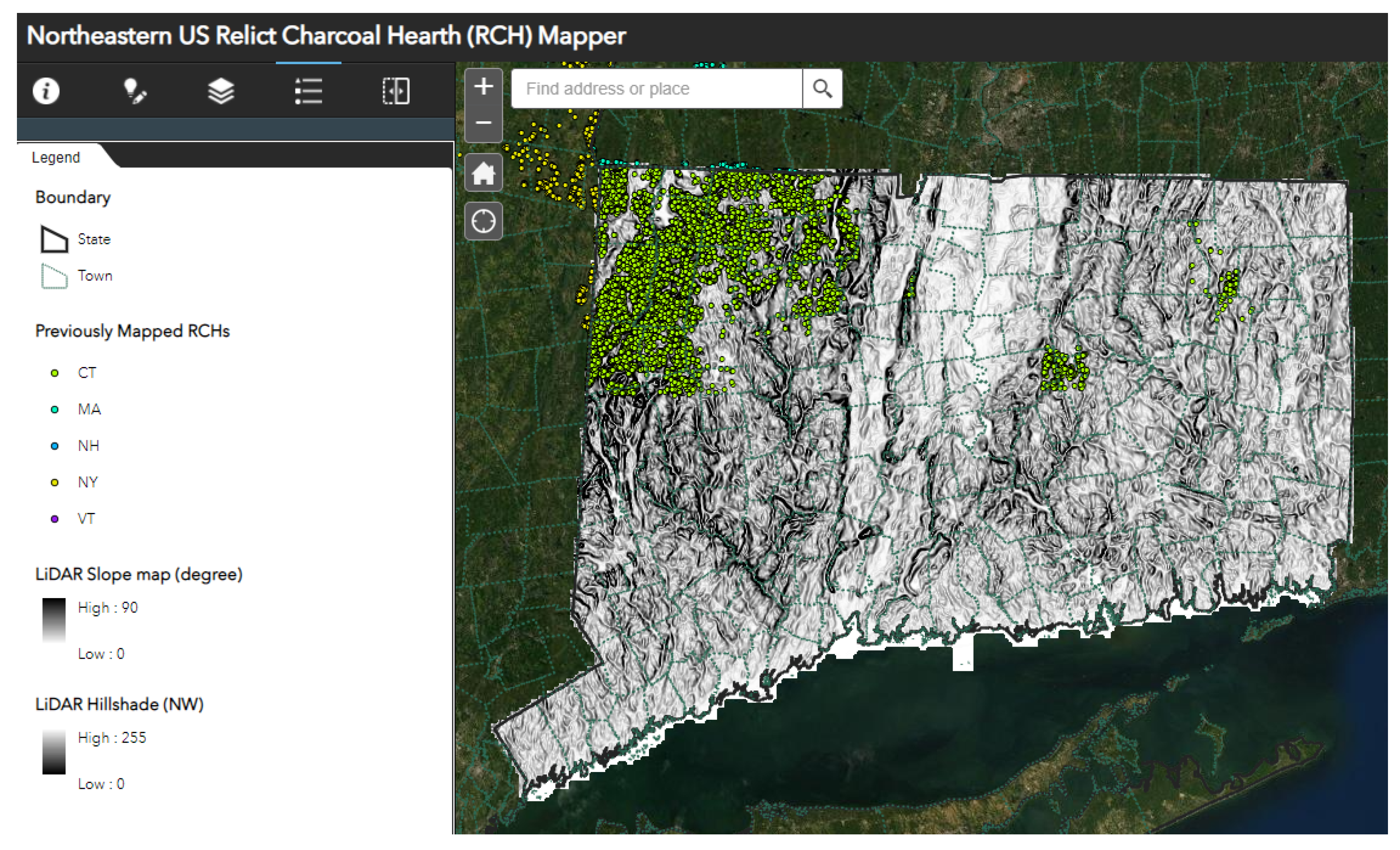
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Johnson, K.M.; Ouimet, W.B. Reconstructing Historical Forest Cover and Land Use Dynamics in the Northeastern United States Using Geospatial Analysis and Airborne LiDAR. Ann. Am. Assoc. Geogr. 2021, 111, 1656–1678. [Google Scholar] [CrossRef]
- Straka, T.J. Historic Charcoal Production in the US and Forest Depletion: Development of Production Parameters. Adv. Hist. Stud. 2014, 3, 104–114. [Google Scholar] [CrossRef] [Green Version]
- Raab, T.; Hirsch, F.; Ouimet, W.; Johnson, K.M.; Dethier, D.; Raab, A. Architecture of relict charcoal hearths in northwestern Connecticut, USA. Geoarchaeology 2017, 32, 502–510. [Google Scholar] [CrossRef]
- Johnson, K.M.; Ouimet, W.B. An observational and theoretical framework for interpreting the landscape palimpsest through airborne LiDAR. Appl. Geogr. 2018, 91, 32–44. [Google Scholar] [CrossRef]
- Kemper, J. American Charcoal Making in the Era of the Cold-Blast Furnace; Electronic Document; U.S. Department of the Interior, National Park Service: Washington, DC, USA, 1941.
- Gordon, R.B. A Landscape Transformed: The Ironmaking District of Salisbury; Oxford University Press: New York, NY, USA, 2000. [Google Scholar]
- Witharana, C.; Ouimet, W.B.; Johnson, K.M. Using LiDAR and GEOBIA for automated extraction of eighteenth–late nineteenth century relict charcoal hearths in southern New England. GIScience Remote Sens. 2018, 55, 183–204. [Google Scholar] [CrossRef]
- Johnson, K.M.; Ouimet, W.B. Rediscovering the lost archaeological landscape of southern New England using airborne light detection and ranging (LiDAR). J. Archaeol. Sci. 2014, 43, 9–20. [Google Scholar] [CrossRef]
- Trier, Ø.D.; Reksten, J.H.; Løseth, K. Automated mapping of cultural heritage in Norway from airborne lidar data using faster R-CNN. Int. J. Appl. Earth Obs. Geoinf. 2021, 95, 102241. [Google Scholar] [CrossRef]
- Gallwey, J.; Eyre, M.; Tonkins, M.; Coggan, J. Bringing Lunar LiDAR Back Down to Earth: Mapping Our Industrial Heritage through Deep Transfer Learning. Remote Sens. 2019, 11, 1994. [Google Scholar] [CrossRef] [Green Version]
- Verschoof-van der Vaart, W.B.; Lambers, K. Learning to Look at LiDAR: The Use of R-CNN in the Automated Detection of Archaeological Objects in LiDAR Data from the Netherlands. J. Comput. Appl. Archaeol. 2019, 2, 31–40. [Google Scholar] [CrossRef] [Green Version]
- Carter, B.P.; Blackadar, J.H.; Conner, W.L.A. When Computers Dream of Charcoal: Using Deep Learning, Open Tools, and Open Data to Identify Relict Charcoal Hearths in and around State Game Lands in Pennsylvania. Adv. Archaeol. Pract. 2021, 1–15. [Google Scholar] [CrossRef]
- Chase, A.F.; Chase, D.Z.; Fisher, C.T.; Leisz, S.J.; Weishampel, J.F. Geospatial revolution and remote sensing LiDAR in mesoamerican archaeology. Proc. Natl. Acad. Sci. USA 2012, 109, 12916–12921. [Google Scholar] [CrossRef] [Green Version]
- Bennett, R.; Welham, K.; Hill, R.A.; Ford, A. A comparison of visualization techniques for models created from airborne laser scanned data. Archaeol. Prospect. 2012, 19, 41–48. [Google Scholar] [CrossRef]
- Howey, M.C.L.; Sullivan, F.B.; Tallant, J.; Kopple, R.V.; Palace, M.W. Detecting precontact anthropogenic microtopographic features in a forested landscape with lidar: A case study from the Upper Great Lakes Region, AD 1000-1600. PLoS ONE 2016, 11, e0162062. [Google Scholar] [CrossRef] [PubMed]
- Hesse, R. LiDAR-derived local relief models-a new tool for archaeological prospection. Archaeol. Prospect. 2010, 17, 67–72. [Google Scholar] [CrossRef]
- Štular, B.; Kokalj, Ž.; Oštir, K.; Nuninger, L. Visualization of lidar-derived relief models for detection of archaeological features. J. Archaeol. Sci. 2012, 39, 3354–3360. [Google Scholar] [CrossRef]
- Iriarte, J.; Robinson, M.; de Souza, J.; Damasceno, A.; da Silva, F.; Nakahara, F.; Ranzi, A.; Aragao, L. Geometry by Design: Contribution of Lidar to the Understanding of Settlement Patterns of the Mound Villages in SW Amazonia. J. Comput. Appl. Archaeol. 2020, 3, 151–169. [Google Scholar] [CrossRef]
- Doneus, M. Openness as visualization technique for interpretative mapping of airborne lidar derived digital terrain models. Remote Sens. 2013, 5, 6427–6442. [Google Scholar] [CrossRef] [Green Version]
- Evans, D.H.; Fletcher, R.J.; Pottier, C.; Chevance, J.B.; Soutif, D.; Tan, B.S.; Im, S.; Ea, D.; Tin, T.; Kim, S.; et al. Uncovering archaeological landscapes at Angkor using lidar. Proc. Natl. Acad. Sci. USA 2013, 110, 12595–12600. [Google Scholar] [CrossRef] [Green Version]
- Schneider, A.; Takla, M.; Nicolay, A.; Raab, A.; Raab, T. A template-matching approach combining morphometric variables for automated mapping of charcoal kiln sites. Archaeol. Prospect. 2015, 22, 45–62. [Google Scholar] [CrossRef]
- Orengo, H.A.; Conesa, F.C.; Garcia-Molsosa, A.; Lobo, A.; Green, A.S.; Madella, M.; Petrie, C.A. Automated detection of archaeological mounds using machine-learning classification of multisensor and multitemporal satellite data. Proc. Natl. Acad. Sci. USA 2020, 117, 18240–18250. [Google Scholar] [CrossRef] [PubMed]
- Guyot, A.; Hubert-Moy, L.; Lorho, T. Detecting Neolithic burial mounds from LiDAR-derived elevation data using a multi-scale approach and machine learning techniques. Remote Sens. 2018, 10, 225. [Google Scholar] [CrossRef] [Green Version]
- Trier, Ø.D.; Cowley, D.C.; Waldeland, A.U. Using deep neural networks on airborne laser scanning data: Results from a case study of semi-automatic mapping of archaeological topography on Arran, Scotland. Archaeol. Prospect. 2019, 26, 165–175. [Google Scholar] [CrossRef]
- Guyot, A.; Lennon, M.; Hubert-moy, L. Combined Detection and Segmentation of Archeological Structures from LiDAR Data Using a Deep Learning Approach. J. Comput. Appl. Archaeol. 2021, 4, 1–19. [Google Scholar] [CrossRef]
- Davis, D.S.; Lundin, J. Locating Charcoal Production Sites in Sweden Using LiDAR, Hydrological Algorithms, and Deep Learning. Remote Sens. 2021, 13, 3680. [Google Scholar] [CrossRef]
- Gordon, R.B.; Raber, M. Industrial Heritage in Northwest Connecticut: A Guide to History and Archaeology; Connecticut Academy of Arts and Sciences: New Haven, CT, USA, 2000. [Google Scholar]
- Foster, D.R.; Donahue, B.; Kittredge, D.; Motzkin, G.; Hall, B.; Turner, B.; Chilton, E. New England’s Forest Landscape. Agrar. Landsc. Transit. 2008, 44–88. [Google Scholar]
- Anderson, E. Mapping Relict Charcoal Hearths in the Northeast US Using Deep Learning Convolutional Neural Networks and LIDAR Data; University of Connecticut: Storrs, CT, USA, 2019. [Google Scholar]
- Capitol Region Council of Governments (CRCoG). Connecticut Statewide LiDAR 2016 Bare Earth DEM. Available online: http://www.cteco.uconn.edu/metadata/dep/document/lidarDEM_2016_fgdc_plus.htm (accessed on 14 November 2021).
- Connecticut Environmental Conditions Online NRCS Northwest LiDAR 2011 Metadata. Available online: https://cteco.uconn.edu/data/lidar/docs/NWLidar/FGDC_CONNECTICUT_BARE_EARTH_LAS.xml (accessed on 14 November 2020).
- Doneus, M.; Briese, C.; Fera, M.; Janner, M. Archaeological prospection of forested areas using full-waveform airborne laser scanning. J. Archaeol. Sci. 2008, 35, 882–893. [Google Scholar] [CrossRef]
- Pfeifer, N.; Gorte, B.; Oude Elberink, S. Influences of vegetation on laser altimetry—Analysis and correction approaches. In Proceedings of the Natscan, Laser-Scanners for Forest and Landscape Assessment, Freiburg, Germany, 3–6 October 2004; Volume 36, pp. 283–287. [Google Scholar]
- Connecticut Environmental Conditions Online (CT ECO). Connecticut Statewide LiDAR 2016 Bare Earth DEM. Available online: https://cteco.uconn.edu/data/lidar/index.htm (accessed on 14 November 2020).
- Verbovšek, T.; Popit, T.; Kokalj, Ž. VAT method for visualization of mass movement features: An alternative to hillshaded DEM. Remote Sens. 2019, 11, 2946. [Google Scholar] [CrossRef]
- Kokalj, Ž.; Somrak, M. Why not a single image? Combining visualizations to facilitate fieldwork and on-screen mapping. Remote Sens. 2019, 11, 747. [Google Scholar] [CrossRef] [Green Version]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-view factor as a relief visualization technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef] [Green Version]
- Leonard, J.; Ouimet, W.B.; Dow, S. Evaluating User Interpretation and Error associated with Digitizing Stone Walls using airborne LiDAR. Geol. Soc. Am. Abstr. Programs 2021, 53. [Google Scholar] [CrossRef]
- Johnson, K.M.; Ives, T.H.; Ouimet, W.B.; Sportman, S.P. High-resolution airborne Light Detection and Ranging data, ethics and archaeology: Considerations from the northeastern United States. Archaeol. Prospect. 2021, 28, 293–303. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. Med. Image Comput. Comput. Interv. 2015, 9351, 234–241. [Google Scholar] [CrossRef] [Green Version]
- Mboga, N.; Grippa, T.; Georganos, S.; Vanhuysse, S.; Smets, B.; Dewitte, O.; Wolff, E.; Lennert, M. Fully convolutional networks for land cover classification from historical panchromatic aerial photographs. ISPRS J. Photogramm. Remote Sens. 2020, 167, 385–395. [Google Scholar] [CrossRef]
- Yan, S.; Xu, L.; Yu, G.; Yang, L.; Yun, W.; Zhu, D.; Ye, S.; Yao, X. Glacier classification from Sentinel-2 imagery using spatial-spectral attention convolutional model. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102445. [Google Scholar] [CrossRef]
- Peng, D.; Zhang, Y.; Guan, H. End-to-end change detection for high resolution satellite images using improved UNet++. Remote Sens. 2019, 11, 1382. [Google Scholar] [CrossRef] [Green Version]
- Waldner, F.; Diakogiannis, F.I. Deep learning on edge: Extracting field boundaries from satellite images with a convolutional neural network. Remote Sens. Environ. 2020, 245, 111741. [Google Scholar] [CrossRef]
- Stoian, A.; Poulain, V.; Inglada, J.; Poughon, V.; Derksen, D. Land cover maps production with high resolution satellite image time series and convolutional neural networks: Adaptations and limits for operational systems. Remote Sens. 2019, 11, 1986. [Google Scholar] [CrossRef] [Green Version]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the 32nd International Conference on Machine Learning, ICML 2015, Lille, France, 6–11 July 2015; Volume 1, pp. 448–456. [Google Scholar]
- Capitol Region Council of Governments (CRCoG). 2016 Aerial Imagery. Available online: http://cteco.uconn.edu/data/flight2016/index.htm (accessed on 14 November 2020).
- Center for Land Use Education & Research (CT CLEAR). 2015 Connecticut Land Cover. Available online: https://clear.uconn.edu/projects/landscape/download.htm#top (accessed on 14 November 2020).
- Johnson, K.M.; Ouimet, W.B.; Dow, S.; Haverfield, C. Estimating Historically Cleared and Forested Land in Massachusetts, USA, Using Airborne LiDAR and Archival Records. Remote Sens. 2021, 13, 4318. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Area (km2) | Landscape Type | RCH Count |
|---|---|---|---|
| Test 1 | 0.94 | >15° slopes with developed regions (e.g., sparse residential area) and stream/river bed running through the area | 44 |
| Test 2 | 1.59 | Developed region interspersed with >15° slopes | 17 |
| Test 3 | 1.17 | >15° slopes with deciduous landscape | 89 |
| Test 4 | 0.53 | <15° slopes with coniferous landscape | 7 |
| Test 5 | 1.13 | Smooth terrain and cleared field with no RCHs | 0 |
| Test 6 | 0.35 | >15° slopes with very rough terrain | 9 |
| Input Scenarios | Description | # of Rasters |
|---|---|---|
| Scenario 1 (S1) | Slope | 1 |
| Scenario 2 (S2) | VAT | 1 |
| Scenario 3 (S3) | Slope and hillshades (azimuth angle: 0, 45, 90, 180, 270, 315 deg.) | 7 |
| Scenario 4 (S4) | Slope, hillshades (azimuth angle: 0, 45, 90, 180, 270, 315 deg.), and VAT | 8 |
| Hyperparameter | Value/Type |
|---|---|
| Batch size | 16 |
| Optimizer | Adam |
| Learning rate | Initially starting from 0.001 |
| Loss function | Binary Cross Entropy |
| Epochs | Up to 30 (used early stopping callback) |
| Region | Input Scenario | True Positives | False Positives | False Negatives | Precision | Recall | F1 Score |
|---|---|---|---|---|---|---|---|
| Test 1 | S1 | 31 | 6 | 13 | 86.1% | 70.5% | 77.5% |
| S2 | 31 | 2 | 13 | 93.9% | 70.5% | 80.5% | |
| S3 | 38 | 3 | 6 | 92.7% | 86.4% | 89.4% | |
| S4 | 36 | 3 | 8 | 92.3% | 81.8% | 86.7% | |
| Test 2 | S1 | 9 | 4 | 8 | 69.2% | 52.9% | 60.0% |
| S2 | 9 | 2 | 8 | 81.8% | 52.9% | 64.3% | |
| S3 | 9 | 3 | 8 | 75.0% | 52.9% | 62.1% | |
| S4 | 11 | 6 | 6 | 64.7% | 64.7% | 64.7% | |
| Test 3 | S1 | 84 | 3 | 5 | 96.6% | 94.4% | 95.5% |
| S2 | 83 | 4 | 6 | 95.4% | 93.3% | 94.3% | |
| S3 | 83 | 4 | 6 | 95.4% | 93.3% | 94.3% | |
| S4 | 87 | 9 | 2 | 90.6% | 97.8% | 94.1% | |
| Test 4 | S1 | 1 | 2 | 6 | 33.3% | 14.3% | 20.0% |
| S2 | 0 | 1 | 7 | 0.0% | 0.0% | 0.0% | |
| S3 | 4 | 0 | 3 | 100.0% | 57.1% | 72.7% | |
| S4 | 0 | 2 | 6 | 0.0% | 0.0% | 0.0% | |
| Test 5 | S1 | 0 | 3 | 0 | 0.0% | N/A | N/A |
| S2 | 0 | 1 | 0 | 0.0% | N/A | N/A | |
| S3 | 0 | 2 | 0 | 0.0% | N/A | N/A | |
| S4 | 0 | 3 | 0 | 0.0% | N/A | N/A | |
| Test 6 | S1 | 8 | 1 | 1 | 88.9% | 88.9% | 88.9% |
| S2 | 9 | 2 | 0 | 81.8% | 100.0% | 90.0% | |
| S3 | 9 | 2 | 0 | 81.8% | 100.0% | 90.0% | |
| S4 | 6 | 2 | 3 | 75.0% | 66.7% | 70.6% |
| Town | Input Scenario | True Positives | False Positives | False Negatives | Precision | Recall | F1 Score |
|---|---|---|---|---|---|---|---|
| North Canaan | S1 | 235 | 41 | 68 | 85.14% | 77.56% | 81.2% |
| S2 | 243 | 28 | 54 | 89.67% | 81.82% | 85.6% | |
| S3 | 223 | 81 | 79 | 73.36% | 73.84% | 73.6% | |
| S4 | 234 | 60 | 67 | 79.59% | 77.74% | 78.7% | |
| Canaan | S1 | 1752 | 389 | 596 | 81.83% | 74.62% | 78.1% |
| S2 | 1950 | 287 | 536 | 87.17% | 78.44% | 82.6% | |
| S3 | 1876 | 271 | 613 | 87.38% | 75.37% | 80.9% | |
| S4 | 1876 | 340 | 610 | 84.66% | 75.46% | 79.8% | |
| Cornwall | S1 | 2107 | 508 | 651 | 80.57% | 76.40% | 78.4% |
| S2 | 2280 | 466 | 532 | 83.03% | 81.08% | 82.0% | |
| S3 | 2237 | 497 | 595 | 81.82% | 78.99% | 80.4% | |
| S4 | 2286 | 526 | 520 | 81.29% | 81.47% | 81.4% | |
| Norfolk | S1 | 1105 | 515 | 464 | 68.21% | 70.43% | 69.3% |
| S2 | 1235 | 352 | 466 | 77.82% | 72.60% | 75.1% | |
| S3 | 1206 | 382 | 505 | 75.94% | 70.49% | 73.1% | |
| S4 | 1202 | 389 | 497 | 75.55% | 70.75% | 73.1% | |
| Goshen | S1 | 530 | 281 | 209 | 65.35% | 71.72% | 68.4% |
| S2 | 537 | 172 | 236 | 75.74% | 69.47% | 72.5% | |
| S3 | 550 | 249 | 233 | 68.84% | 70.24% | 69.5% | |
| S4 | 547 | 239 | 223 | 69.59% | 71.04% | 70.3% |
| Landscape Condition | True Positive | False Positive | False Negative | Precision | Recall | F1 Score | |
|---|---|---|---|---|---|---|---|
| Land cover | Deciduous | 5013 | 775 | 1267 | 86.6% | 79.8% | 83.1% |
| Conifer | 1133 | 406 | 511 | 73.6% | 68.9% | 71.2% | |
| Other | 99 | 124 | 46 | 44.4% | 68.3% | 53.8% | |
| Slope | High (>15°) | 1293 | 188 | 290 | 87.3% | 81.7% | 84.4% |
| Low (>15°) | 4952 | 1117 | 1534 | 81.6% | 76.3% | 78.9% | |
| Land cover & slope | Deciduous & high slope | 1061 | 115 | 209 | 90.2% | 83.5% | 86.8% |
| Deciduous & low slope | 3952 | 660 | 1058 | 85.7% | 78.9% | 82.1% | |
| Conifer & high slope | 215 | 59 | 74 | 78.5% | 74.4% | 76.4% | |
| Conifer & low slope | 918 | 347 | 437 | 72.6% | 67.7% | 70.1% | |
| Other & high slope | 17 | 14 | 7 | 54.8% | 70.8% | 61.8% | |
| Other & low slope | 82 | 110 | 39 | 42.7% | 67.8% | 52.4% | |
| Author | RS Data | DL Method | Target Feature (Diameter) | Spatial Scale (km2) | Precision (%) | Recall (%) | F1 Score (%) |
|---|---|---|---|---|---|---|---|
| [10] | LiDAR SLRM, PO, NO | CNN (transfer learning) | historic mining pits (2~3 m) | 1 | 81 | 80 | 81 |
| 0.2 | 92 | 83 | 87 | ||||
| [11] | LiDAR SLRM | Faster R-CNN | barrows | 10.95 | 36–90 (avg.: 64) | 62–81 (avg.: 73) | 46–79 (avg.:67) |
| Celtic fields | 10.95 | 26–71 (avg.: 46) | 19–97 (avg.: 60) | 29–68 (avg.: 43) | |||
| [24] | LiDAR SLRM | ResNet | roundhouse (8~15 m) | 432 | 46 | 73 | 56 |
| small cairn (~10 m) | 432 | 18 | 20 | 19 | |||
| shieling hut (~20 m) | 432 | 12 | 26 | 17 | |||
| [9] | LiDAR HS and LRM | R-CNN | grave mounds (~77 m) | 16.58 | 84 | 70 | 76 |
| pitfall traps (4~7 m) | 16.58 | 86 | 80 | 83 | |||
| charcoal kilns (10~20 m) | 16.58 | 96 | 68 | 80 | |||
| grave mounds (~77 m) | 67 | 38 | 14 | 21 | |||
| charcoal kilns (10~20 m) | 937 | 62 | 90 | 73 | |||
| Our study | LiDAR SP, HS, and VAT | U-Net | charcoal hearth (7–12 m) | <1.5–493 | 75–100 | 53–100 | 62–94 (avg.: 82) |
| 76–90 | 70–82 | 73–86 (avg.: 80) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suh, J.W.; Anderson, E.; Ouimet, W.; Johnson, K.M.; Witharana, C. Mapping Relict Charcoal Hearths in New England Using Deep Convolutional Neural Networks and LiDAR Data. Remote Sens. 2021, 13, 4630. https://doi.org/10.3390/rs13224630
Suh JW, Anderson E, Ouimet W, Johnson KM, Witharana C. Mapping Relict Charcoal Hearths in New England Using Deep Convolutional Neural Networks and LiDAR Data. Remote Sensing. 2021; 13(22):4630. https://doi.org/10.3390/rs13224630
Chicago/Turabian StyleSuh, Ji Won, Eli Anderson, William Ouimet, Katharine M. Johnson, and Chandi Witharana. 2021. "Mapping Relict Charcoal Hearths in New England Using Deep Convolutional Neural Networks and LiDAR Data" Remote Sensing 13, no. 22: 4630. https://doi.org/10.3390/rs13224630
APA StyleSuh, J. W., Anderson, E., Ouimet, W., Johnson, K. M., & Witharana, C. (2021). Mapping Relict Charcoal Hearths in New England Using Deep Convolutional Neural Networks and LiDAR Data. Remote Sensing, 13(22), 4630. https://doi.org/10.3390/rs13224630