
Knowledge-Aided Ground Moving Target Relocation for Airborne Dual-Channel Wide-Area Radar by Exploiting the Antenna Pattern Information




Abstract
:1. Introduction
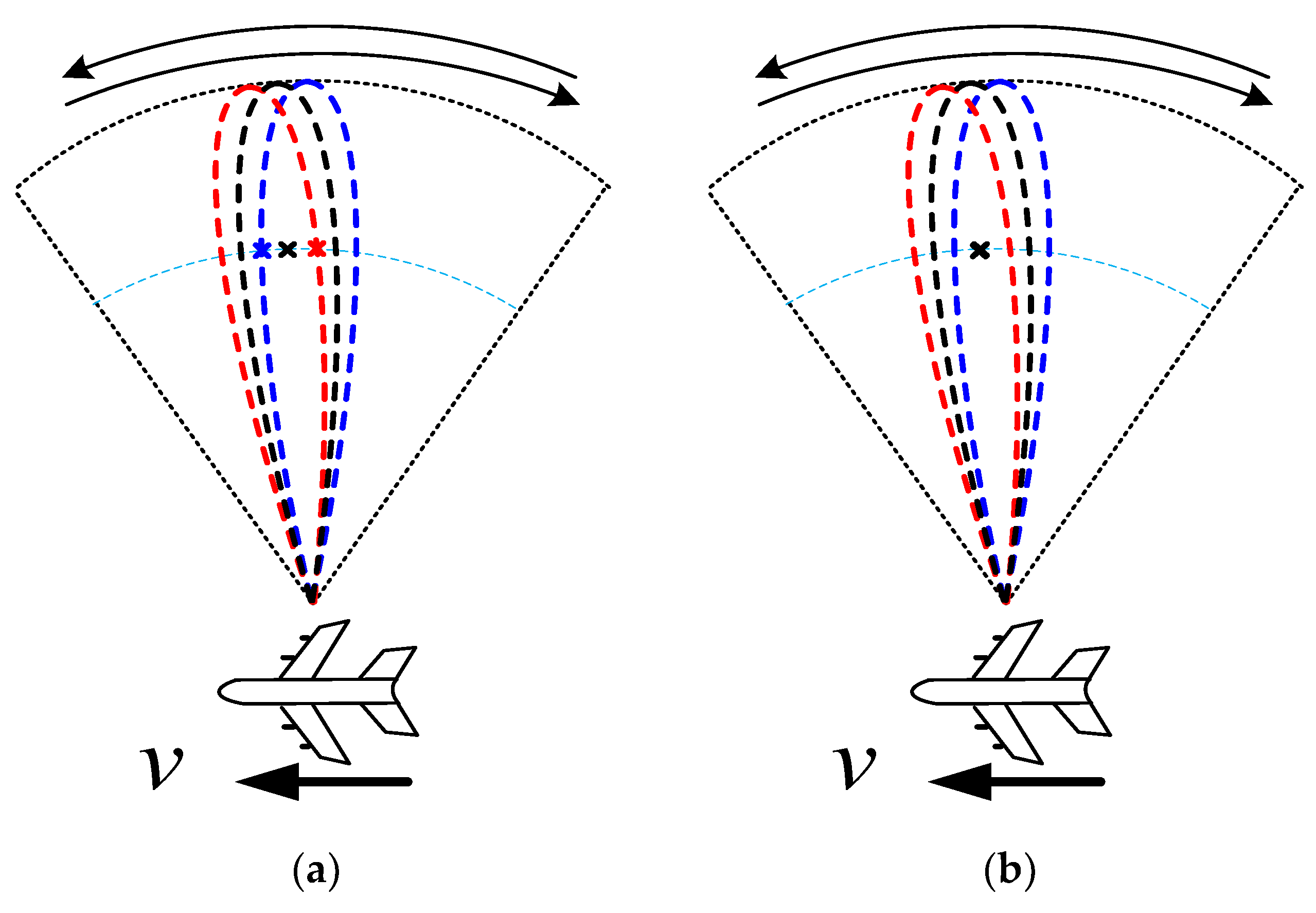
2. Target Relocation Model
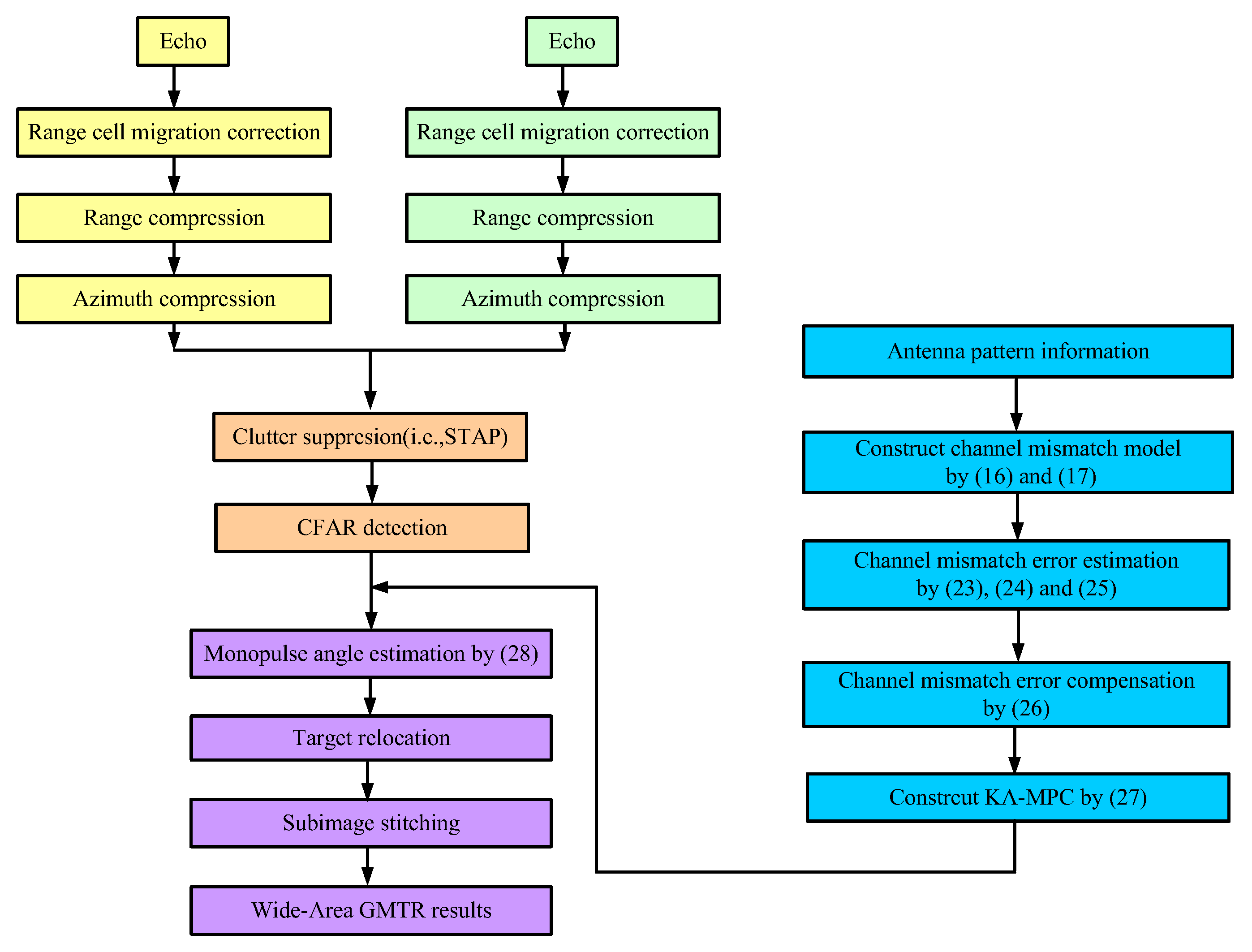
3. Knowledge-Aided Target Relocation by Exploiting the Antenna Pattern Information
3.1. Channel Mismatch Model
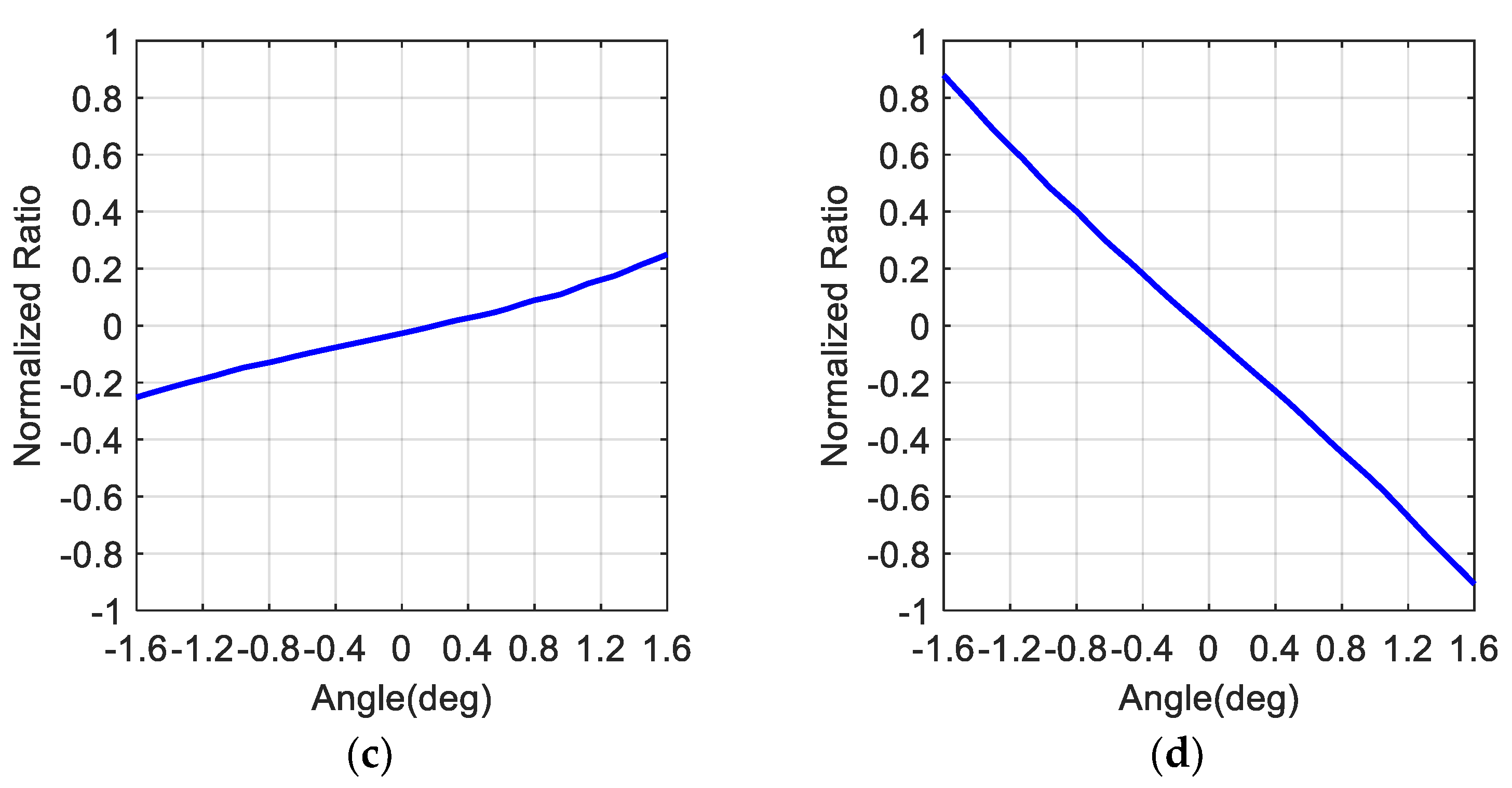
3.2. Target Relocation by Exploiting the Antenna Pattern Information
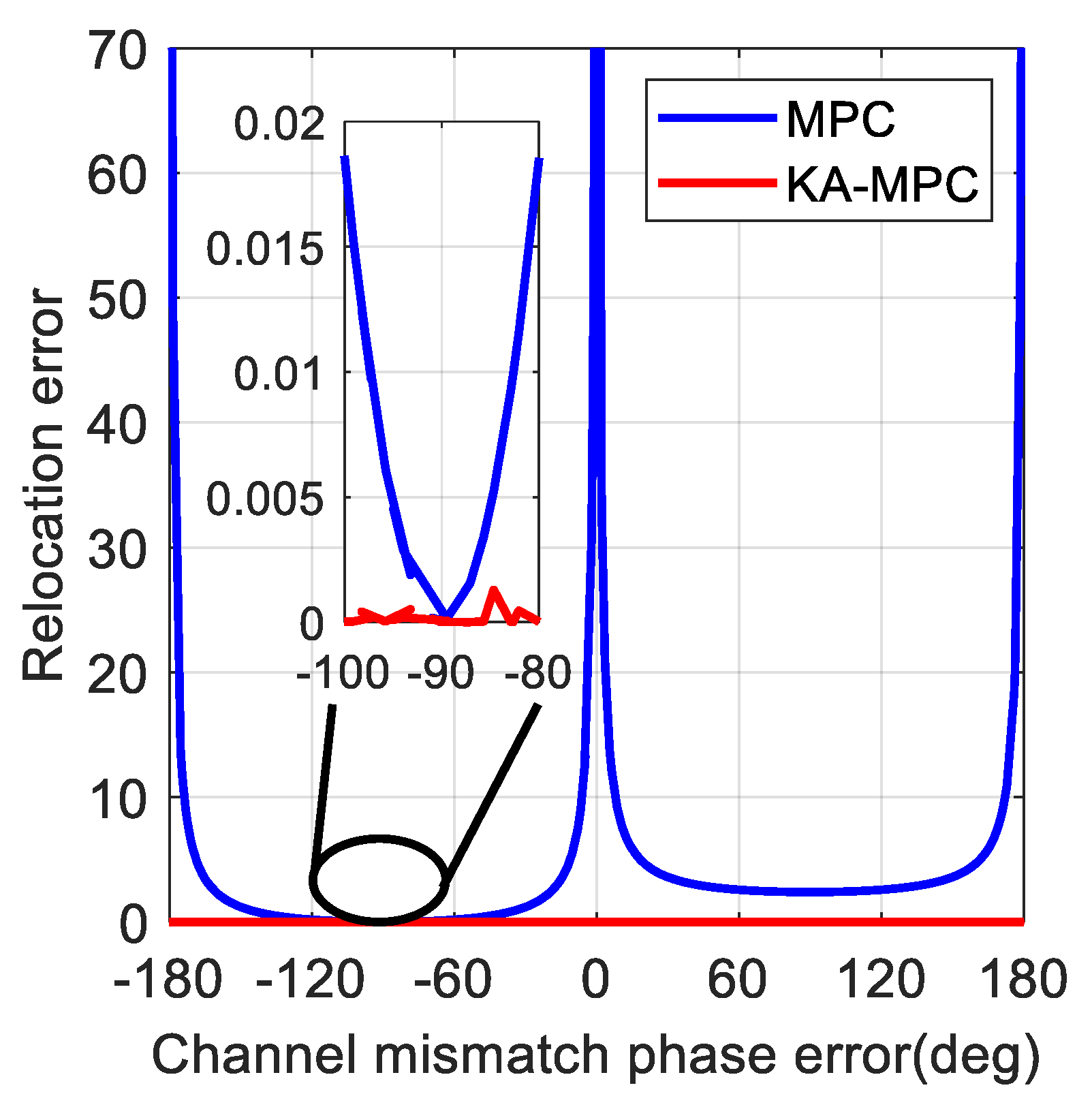
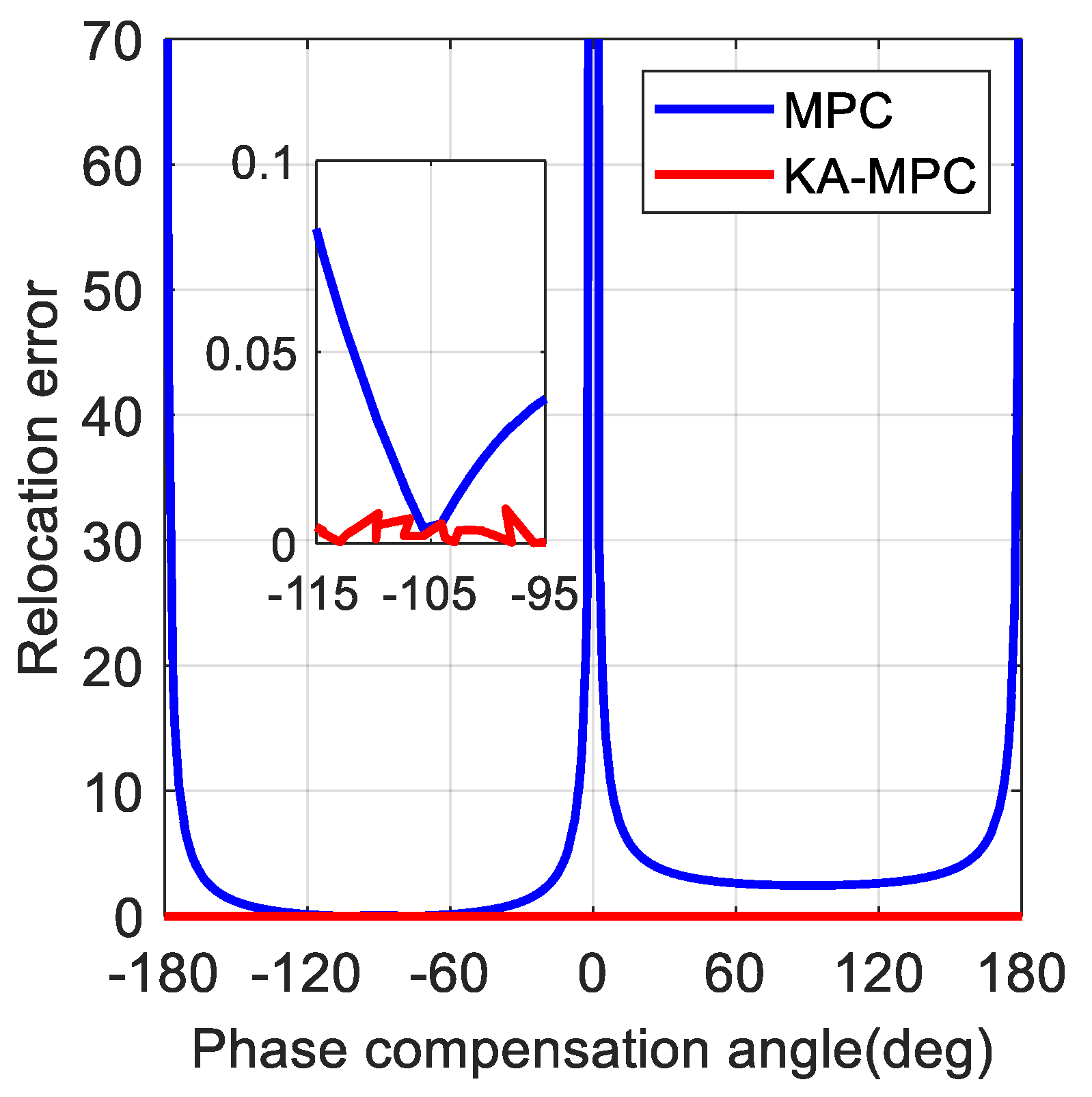
3.3. Performance of Target Relocation
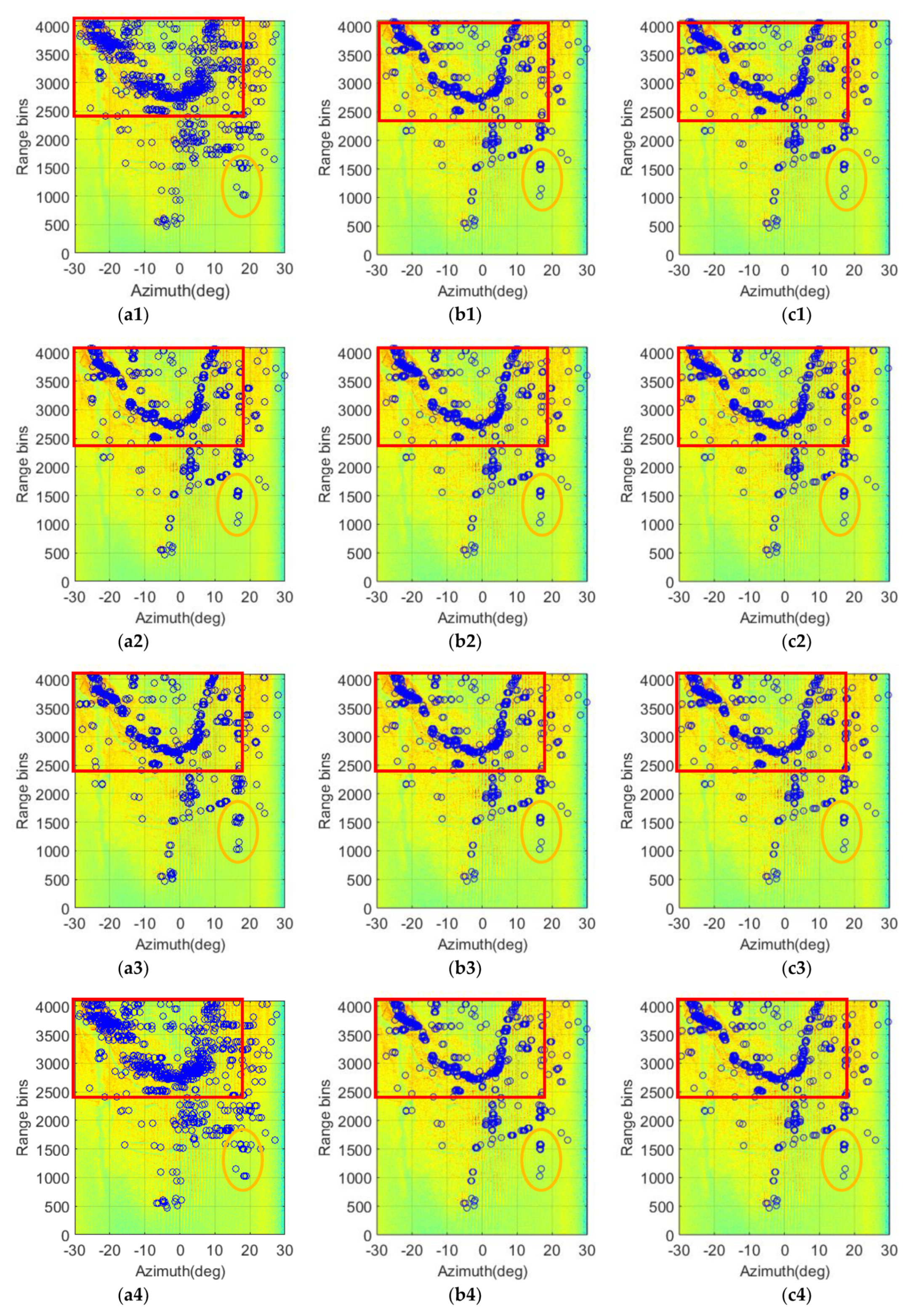
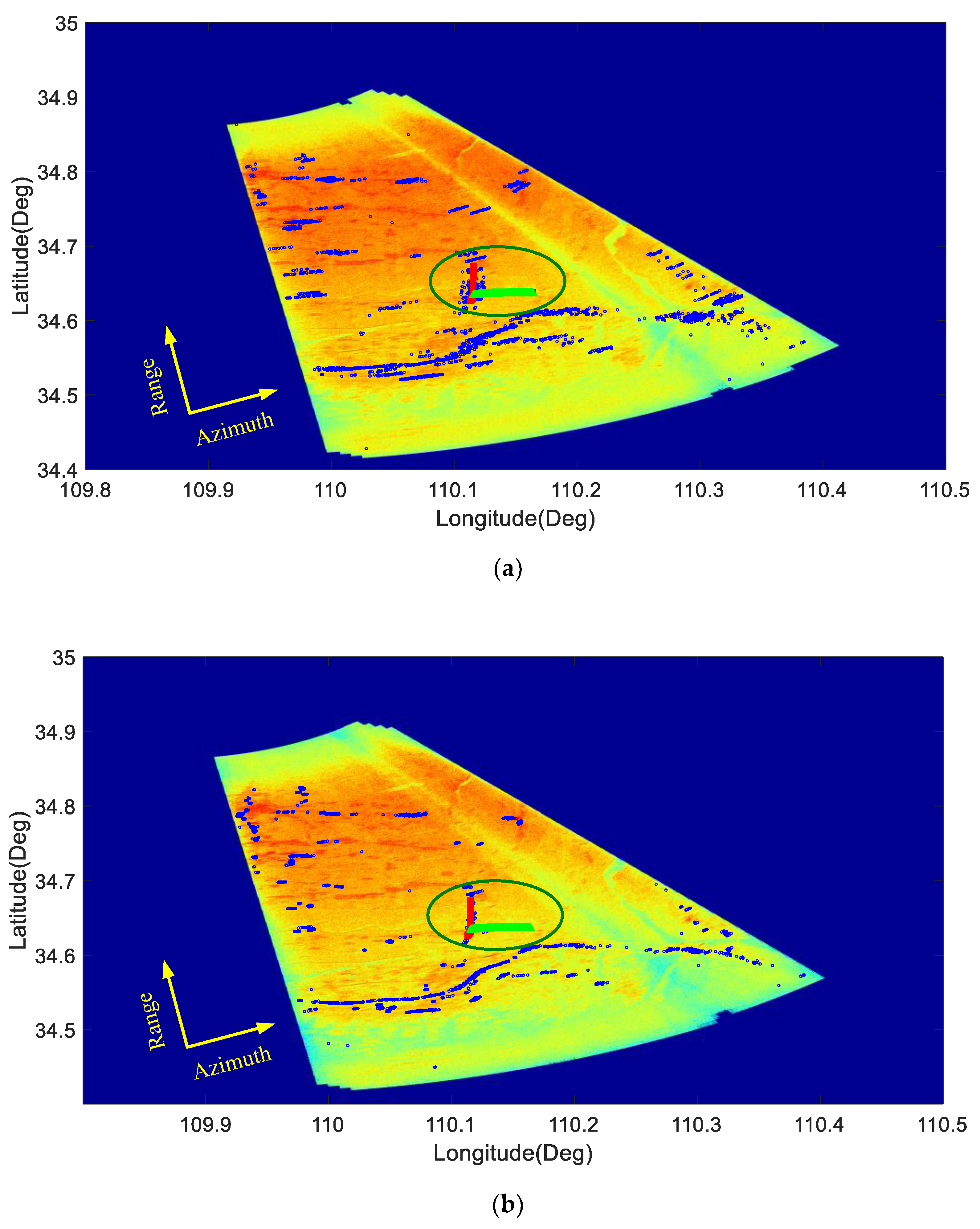
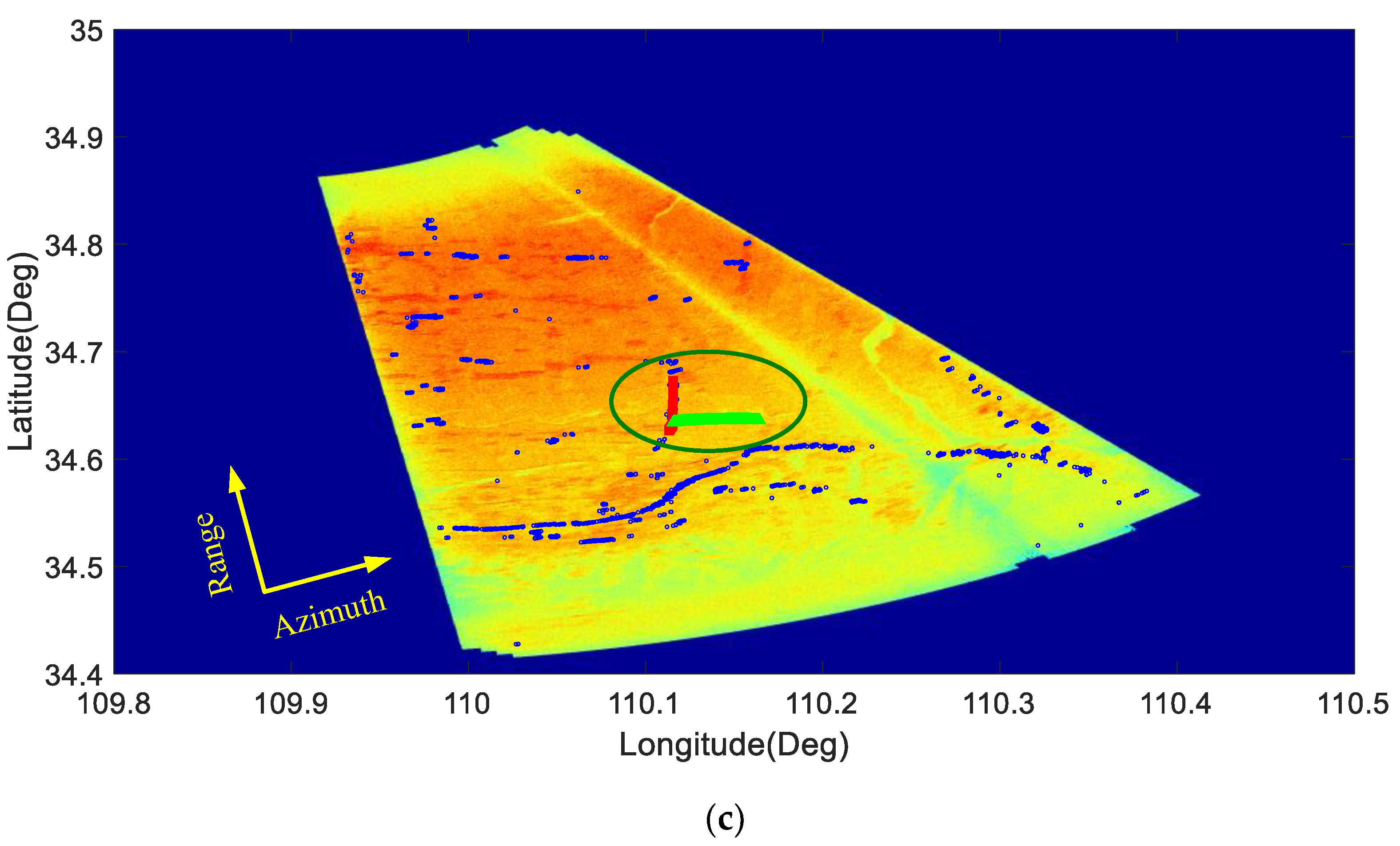
4. Real Data Results
4.1. Experimental Results I
4.2. Experimental Results II
4.3. Experimental Results III
4.4. Experimental Results IV
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Skolnik, M.I. Radar Handbook, 4th ed.; McGraw-Hill: New York, NY, USA, 2008; pp. 23.1–23.36. [Google Scholar]
- Richards, M.A. Fundamentals of Radar Signal Processing; McGraw-Hill: New York, NY, USA, 2005. [Google Scholar]
- Entzminger, J.N.; Fowler, C.A.; Kenneally, W.J. JointSTARS and GMTI: Past, present and future. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 748–761. [Google Scholar] [CrossRef]
- Ender, J.H.G.; Brenner, A.R. PAMIR-a wideband phased array SAR/ MTI system. IEE Proc.-Radar Sonar Navig. 2003, 150, 165–172. [Google Scholar] [CrossRef] [Green Version]
- Brenner, A.; Ender, J. Demonstration of advanced reconnaissance techniques with the airborne SAR/GMTI sensor PAMIR. IEE Proc.-Radar Sonar Navig. 2006, 153, 152–162. [Google Scholar] [CrossRef] [Green Version]
- Cerutti-Maori, D.; Klare, J.; Brenner, A.R.; Ender, J.H. Wide-area traffc monitoring with the SAR/GMTI system PAMIR. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3019–3030. [Google Scholar] [CrossRef]
- Tanelli, S.; Durden, S.L.; Johnson, M.P. Airborne Demonstration of DPCA for Velocity Measurements of Distributed Targets. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1415–1419. [Google Scholar] [CrossRef]
- Ward, J. Space-Time Adaptive Processing for Airborne Radar; MIT Lincoln Lab: Lexington, MA, USA, 1994. [Google Scholar]
- Wang, H.; Cai, L. On adaptive spatial-temporal processing for airborne surveillance radar systems. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 660–670. [Google Scholar] [CrossRef]
- Adve, R.S.; Hale, T.B.; Wicks, M.C. Practical joint domain localised adaptive processing in homogeneous and nonhomogeneous environments. Part 1: Homogeneous environments. IEE Proc.-Radar Sonar Navig. 2000, 147, 57–65. [Google Scholar] [CrossRef]
- Adve, R.S.; Hale, T.B.; Wicks, M.C. Practical joint domain localised adaptive processing in homogeneous and nonhomogeneous environments. Part 2: Nonhomogeneous environments. IEE Proc.-Radar Sonar Navig. 2000, 147, 66–74. [Google Scholar] [CrossRef] [Green Version]
- Tong, Y.L.; Wang, T.; Wu, J.X. Improving EFA-STAP performance using persymmetric covariance matrix estimation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 924–936. [Google Scholar] [CrossRef]
- Brown, R.D.; Schneible, R.A.; Wicks, M.C.; Wang, H.; Zhang, Y. STAP for clutter suppression with sum and difference beams. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 634–646. [Google Scholar] [CrossRef]
- Yang, Z.; de Lamare, R.C.; Li, X. L1-regularized STAP algorithms with a generalized sidelobe canceler architecture for airborne radar. IEEE Trans. Signal Process. 2012, 60, 674–686. [Google Scholar] [CrossRef]
- Fa, R.; de Lamare, R.C.; Wang, L. Reduced-Rank STAP schemes for airborne radar based on switched joint interpolation, decimation and filtering algorithm. IEEE Trans. Signal Process. 2010, 58, 4182–4194. [Google Scholar] [CrossRef] [Green Version]
- Sen, S. Low-Rank Matrix Decomposition and Spatio-Temporal Sparse Recovery for STAP Radar. IEEE J. Sel. Top. Signal Process. 2015, 9, 1510–1523. [Google Scholar] [CrossRef]
- Duan, K.Q.; Xu, H.; Yuan, H.D.; Xie, H.T.; Wang, Y.L. Reduced-DOF Three-Dimensional STAP via Subarray Synthesis for Nonsidelooking Planar Array Airborne Radar. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3311–3325. [Google Scholar] [CrossRef]
- Steiner, M.; Gerlach, K. Fast converging adaptive processor or a structured covariance matrix. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 1115–1126. [Google Scholar] [CrossRef]
- Abramovich, Y.I.; Besson, O. Regularized covariance matrix estimation in complex elliptically symmetric distributions using the expected likelihood approach—Part 1: The over-sampled case. IEEE Trans. Signal Process. 2013, 61, 5807–5818. [Google Scholar] [CrossRef] [Green Version]
- Aubry, A.; de Maio, A.; Pallotta, L. A Geometric Approach to Covariance Matrix Estimation and its Applications to Radar Problems. IEEE Trans. Signal Process. 2017, 66, 907–922. [Google Scholar] [CrossRef] [Green Version]
- De Maio, A.; Pallotta, L.; Li, J.; Stoica, P. Loading Factor Estimation Under Affine Constraints on the Covariance Eigenvalues with Application to Radar Target Detection. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 1269–1283. [Google Scholar] [CrossRef]
- Guerci, J.R.; Baranoski, E.J. Knowledge-aided adaptive radar at DARPA: An overview. IEEE Signal Process. Mag. 2006, 23, 41–50. [Google Scholar] [CrossRef]
- Bergin, J.S.; Teixeira, C.M.; Techau, P.M.; Guerci, J.R. Improved clutter mitigation performance using knowledge-aided space-time adaptive processing. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 997–1009. [Google Scholar] [CrossRef]
- Guerci, J.R. Cognitive radar: A knowledge-aided fully adaptive approach. In Proceedings of the IEEE National Conference on Radar, Arlington, VA, USA, 10–14 May 2010; pp. 1365–1370. [Google Scholar] [CrossRef]
- Sun, G.C.; Xing, M.D.; Xia, X.-G.; Wu, Y.R.; Bao, Z. Robust Ground Moving-Target Imaging Using Deramp–Keystone Processing. IEEE Trans. Geosci. Remote Sens. 2012, 51, 966–982. [Google Scholar] [CrossRef]
- Guo, L.; Deng, W.; Yao, D.; Yang, Q.; Ye, L.; Zhang, X. A Knowledge-Based Auxiliary Channel STAP for Target Detection in Shipborne HFSWR. Remote Sens. 2021, 13, 621. [Google Scholar] [CrossRef]
- Li, G.; Xia, X.-G.; Peng, Y.N. Doppler keystone transform: An approach suitable for parallel implementation of SAR moving target imaging. IEEE Geosci. Remote Sens. Lett. 2008, 5, 573–577. [Google Scholar] [CrossRef]
- Wang, W.; An, D.X.; Luo, Y.X.; Zhou, Z. M The Fundamental Trajectory Reconstruction Results of Ground Moving Target from Single-Channel CSAR Geometry. IEEE Trans. Geosci. Remote Sens. 2018, 1–11. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Y. An airborne SAR moving target imaging and motion parameters estimation algorithm with azi-muth-dechirping and the second-order keystone transform applied. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 3967–3976. [Google Scholar] [CrossRef]
- Zheng, J.; Zhu, K.; Niu, Z.; Liu, H.; Liu, Q.H. Generalized Dechirp-Keystone Transform for Radar High-Speed Maneuvering Target Detection and Localization. Remote Sens. 2021, 13, 3367. [Google Scholar] [CrossRef]
- Zhang, X.; Liao, G.; Zhu, S.; Zeng, C.; Shu, Y. Geometry-Information-Aided Efficient Radial Velocity Estimation for Moving Target Imaging and Location Based on Radon Transform. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1105–1117. [Google Scholar] [CrossRef]
- Ender, J.H.G.; Gierull, C.H.; Cerutti-Maori, D. Improved Space-Based Moving Target Indication via Alternate Transmission and Receiver Switching. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3960–3974. [Google Scholar] [CrossRef]
- Budillon, A.; Pascazio, V.; Schirinzi, G. Estimation of Radial Velocity of Moving Targets by Along-Track Interferometric SAR Systems. IEEE Geosci. Remote Sens. Lett. 2008, 5, 349–353. [Google Scholar] [CrossRef]
- Chapin, E.; Chen, C.W. Airborne along-track interferometry for GMTI. IEEE Aerosp. Electron. Syst. Mag. 2009, 24, 13–18. [Google Scholar] [CrossRef]
- Romeiser, R.; Suchandt, S.; Runge, H.; Steinbrecher, U.; Grunler, S. First analysis of TerraSAR-X along-track InSAR-derived current fields. IEEE Trans. Geosci. Remote Sens. 2010, 48, 820–829. [Google Scholar] [CrossRef]
- Deming, R.W.; MacIntosh, S.; Best, M. Three-channel processing for improved geo-location performance in SAR-based GMTI interferometry. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XIX. International Society for Optics and Photonics, Baltimore, MD, USA, 7 May 2012; p. 8394. [Google Scholar] [CrossRef]
- Tian, M.; Yang, Z.W.; Duan, C.D.; Liao, G.S.; Liu, Y.J.; Wang, C.H.; Huang, P.H. A Method for Active Marine Target Detection Based on Complex Interferometric Dissimilarity in Dual-Channel ATI-SAR Systems. IEEE Trans. Geosci. Remote Sens. 2020, 58, 251–267. [Google Scholar] [CrossRef]
- Tao, R.; Li, Y.-L.; Wang, Y. Short-Time Fractional Fourier Transform and Its Applications. IEEE Trans. Signal Process. 2010, 58, 2568–2580. [Google Scholar] [CrossRef]
- Djurovic, I.; Stankovic, L. Robust Wigner distribution with application to the instantaneous frequency estimation. IEEE Trans. Signal Process. 2001, 49, 2985–2993. [Google Scholar] [CrossRef]
- Huang, P.H.; Xia, X.-G.; Gao, Y.S.; Liu, X.Z.; Liao, G.S.; Jiang, X. Ground moving target refocusing in SAR imagery based on RFRT-FrFT. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5476–5492. [Google Scholar] [CrossRef]
- Zhu, S.Q.; Liao, G.S.; Qu, Y.; Zhou, Z.G.; Liu, X.Y. Ground Moving Targets Imaging Algorithm for Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2010, 49, 462–477. [Google Scholar] [CrossRef]
- Li, Z.Y.; Wu, J.J.; Huang, Y.L.; Sun, Z.C.; Yang, J.Y. Ground-moving target imaging and velocity estimation based on mis-matched compression for bistatic forward-looking SAR. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3277–3291. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Liu, B.; Zhang, S.; Nie, L.; Bi, G. A New Motion Parameter Estimation and Relocation Scheme for Airborne Three-Channel CSSAR-GMTI Systems. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4107–4120. [Google Scholar] [CrossRef]
- Yang, J.Y.; Qiu, X.L.; Shang, M.Y.; Zhong, L.H.; Ding, C.B. A Method of Marine Moving Targets Detection in Multi-Channel ScanSAR System. Remote Sens. 2020, 12, 3792. [Google Scholar] [CrossRef]
- Bergin, J.; Guerci, J.; Kirk, D.; Rangaswamy, M. Site-specific performance gain of optimal MIMO radar in heterogeneous clutter. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1156–1161. [Google Scholar] [CrossRef]
- Bergin, J.; Guerci, J.R. Book review of “MIMO radar: Theory and application”. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 51–53. [Google Scholar] [CrossRef]
- Ender, J.H.G. The airborne experimental multi-channel SAR-system AER-II. In Proceedings of the EUSAR’96: European Conference on Synthetic Aperture Radar, Königswinter, Germany, 26–28 March 1996; pp. 49–52. [Google Scholar]
- Yan, H.; Wang, R.Y.; Gao, C.G.; Liu, Y.B.; Zheng, M.J.; Deng, Y.K. Channel balancing algorithm in multichannel wide-area surveillance systems. IET Radar Sonar Navig. 2014, 8, 27–36. [Google Scholar] [CrossRef]
- Hu, R.; Liu, B.; Wang, T.; Liu, D.; Bao, Z. A Knowledge-Based Target Relocation Method for Wide-Area GMTI Mode. IEEE Geosci. Remote Sens. Lett. 2013, 11, 748–752. [Google Scholar] [CrossRef]
- Chen, H.; Lu, Y.; Liu, J.; Yi, X.; Sun, H.; Mu, H.; Wang, Z.; Li, M. Efficient knowledge-aided target relocation algorithm for airborne radar. J. Eng. 2019, 2019, 7589–7592. [Google Scholar] [CrossRef]
- Mosca, E. Angle Estimation in Amplitude Comparison Monopulse Systems. IEEE Trans. Aerosp. Electron. Syst. 1969, AES-5, 205–212. [Google Scholar] [CrossRef]
- Sherman, S.M. Monopulse Principles and Techniques; Artech House: Norwood, MA, USA, 1984. [Google Scholar]
- Paine, A.S. Minimum variance monopulse technique for an adaptive phased array radar. IEE Proc.-Radar Sonar Navig. 1998, 145, 374–380. [Google Scholar] [CrossRef]
- Farina, A.; Gabatel, G.; Sanzullo, R. Estimation of target direction by pseudo-monopulse algorithm. Signal Process. 2000, 80, 295–310. [Google Scholar] [CrossRef]
- Farina, A.; Gini, F.; Greco, M. DOA estimation by exploiting the amplitude modulation induced by antenna scanning. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1276–1286. [Google Scholar] [CrossRef]
- Sedehi, M.; Colone, F.; Lombardo, P. Exploiting the joint distribution of amplitude and monopulse ratio for chi-square fluctu-ating targets for target DOA estimation. In Proceedings of the 7th European Radar Conference, Paris, France, 30 September–1 October 2010; pp. 304–307. [Google Scholar]
- Nickel, U. Performance analysis of space–time-adaptive monopulse. Signal Process. 2004, 84, 1561–1579. [Google Scholar] [CrossRef]
- Nickel, U. Overview of generalized monopulse estimation. IEEE Aerosp. Electron. Syst. Mag. 2006, 21, 27–56. [Google Scholar] [CrossRef]
- Chen, H.; Li, M.; Lu, Y.; Wu, Y.A. DBS image stitching algorithm based on affine transformation. In Proceedings of the IET International Radar Conference 2013, Xi’an, China, 14–16 April 2013. [Google Scholar] [CrossRef]
- Chen, H.; Li, M.; Wang, Z.; Lu, Y.; Cao, R.; Zhang, P.; Zuo, L.; Wu, Y. Cross-Range Resolution Enhancement for DBS Imaging in a Scan Mode Using Aperture-Extrapolated Sparse Representation. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1459–1463. [Google Scholar] [CrossRef]
- Guan, J.; Peng, Y.-N.; He, Y.; Meng, X.-W. Three types of distributed CFAR detection based on local test statistic. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 278–288. [Google Scholar] [CrossRef]
- Ghosh, R.; Vajpeyi, A.; Akula, A.; Shaw, V.; Kumar, S.; Sardana, H.K. Performance Evaluation of a Real-Time Seismic Detection System Based on CFAR Detectors. IEEE Sens. J. 2020, 20, 3678–3686. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Band width | 50 MHz | Time width | 62.5 us |
| Platform | 50 m/s | Meanslant range | 10 km |
| Range numbers | 4096 | Scanning area | −30~30° |
| Pitching angle | 10° | Beam width | 3° |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Band width | 18 MHz | Time width | 50 us |
| Platform | 70 m/s | Pulse Number | 128 |
| Range numbers | 8192 | Scanning area | 140~170° |
| Pitching angle | 5° | Beam width | 1.2° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Wang, Z.; Gao, W.; Sun, H.; Lu, Y.; Li, Y. Knowledge-Aided Ground Moving Target Relocation for Airborne Dual-Channel Wide-Area Radar by Exploiting the Antenna Pattern Information. Remote Sens. 2021, 13, 4724. https://doi.org/10.3390/rs13224724
Chen H, Wang Z, Gao W, Sun H, Lu Y, Li Y. Knowledge-Aided Ground Moving Target Relocation for Airborne Dual-Channel Wide-Area Radar by Exploiting the Antenna Pattern Information. Remote Sensing. 2021; 13(22):4724. https://doi.org/10.3390/rs13224724
Chicago/Turabian StyleChen, Hongmeng, Zeyu Wang, Wenquan Gao, Hanwei Sun, Yaobing Lu, and Yachao Li. 2021. "Knowledge-Aided Ground Moving Target Relocation for Airborne Dual-Channel Wide-Area Radar by Exploiting the Antenna Pattern Information" Remote Sensing 13, no. 22: 4724. https://doi.org/10.3390/rs13224724
APA StyleChen, H., Wang, Z., Gao, W., Sun, H., Lu, Y., & Li, Y. (2021). Knowledge-Aided Ground Moving Target Relocation for Airborne Dual-Channel Wide-Area Radar by Exploiting the Antenna Pattern Information. Remote Sensing, 13(22), 4724. https://doi.org/10.3390/rs13224724