
Compressed Sensing Imaging with Compensation of Motion Errors for MIMO Radar


Abstract
:1. Introduction
- (1)
- We analyzed the essential relationship between the motion errors of array and CS imaging. The proposed method takes effect on estimating the MIMO array motion errors as well as reconstructing images, which is without any approximations.
- (2)
- The optimization problem is solved by a BCD method, which cycles through steps of target reconstruction and MIMO array motion errors estimation and compensation. The motion errors of transmitters and receivers can be estimated by gradient-based optimization algorithms.
- (3)
- Based on the accurate estimation of the motion errors, we can achieve super-resolution imaging. Compared with optical sensors, in special circumstances, such as smoke scenes, it has a better environmental perception ability.
2. Materials and Methods
2.1. MIMO Radar Imaging Model
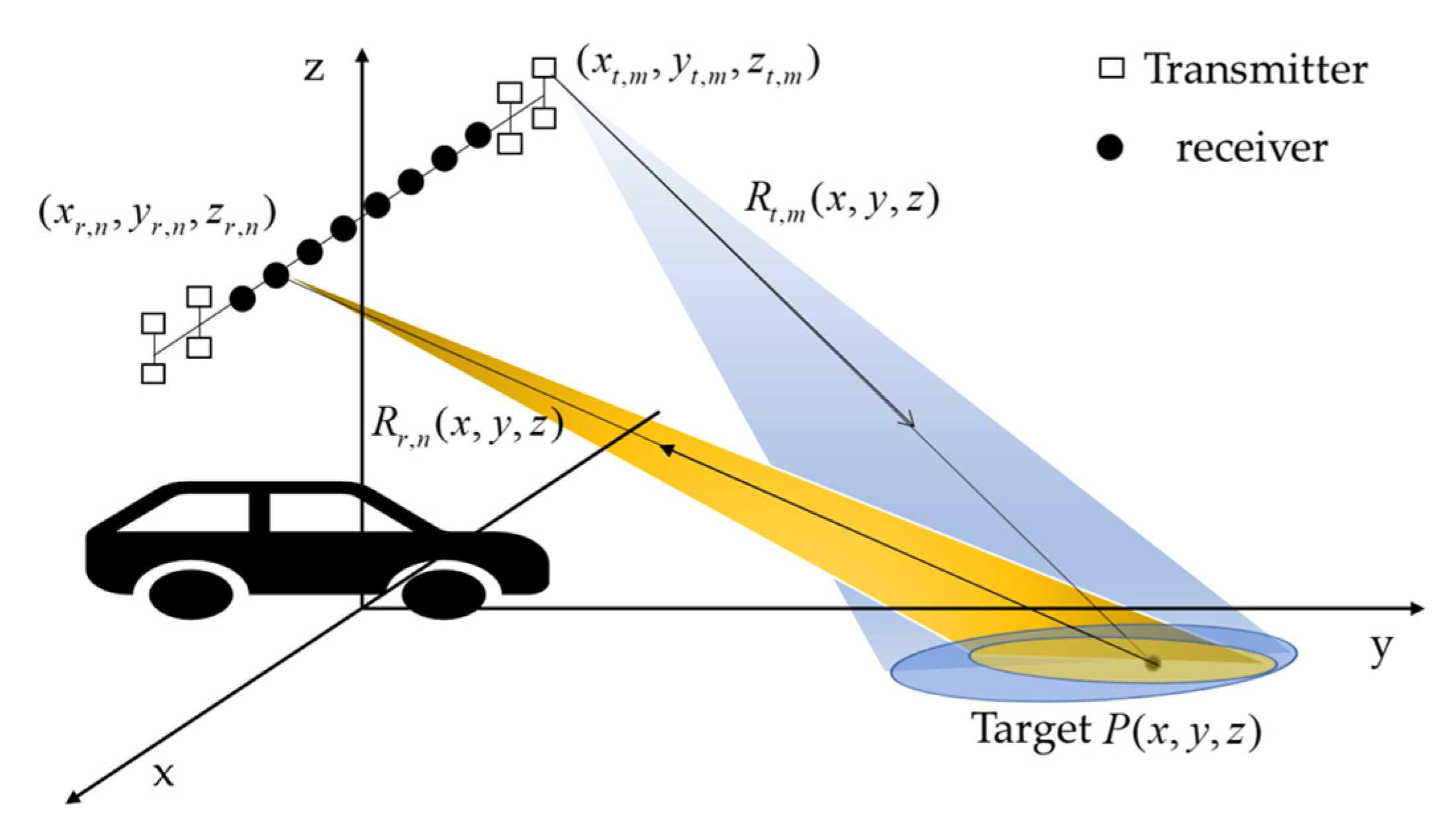
2.1.1. Geometry Model
2.1.2. Signal Model
2.2. CS Imaging with Motion Errors Compensation
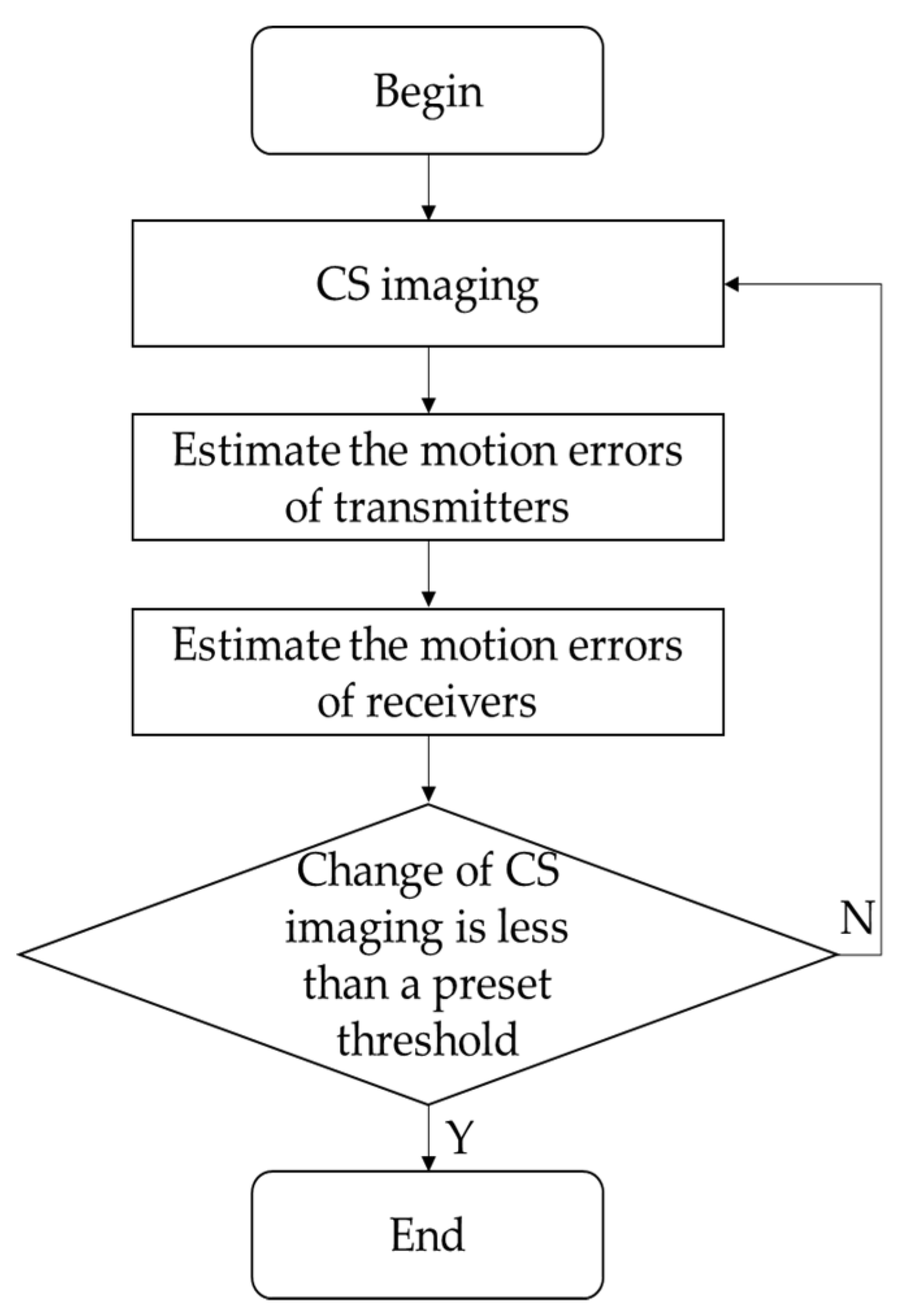
| Algorithm 1 Compressed Sensing Imaging with Compensation of Motion Errors for MIMO Radar |
| Initialize:
, and return to step 1. is smaller than the presupposed threshold. |
2.2.1. Target Reconstruction
2.2.2. MIMO Array Motion Errors Estimation
2.2.3. Computational Complexity
3. Results
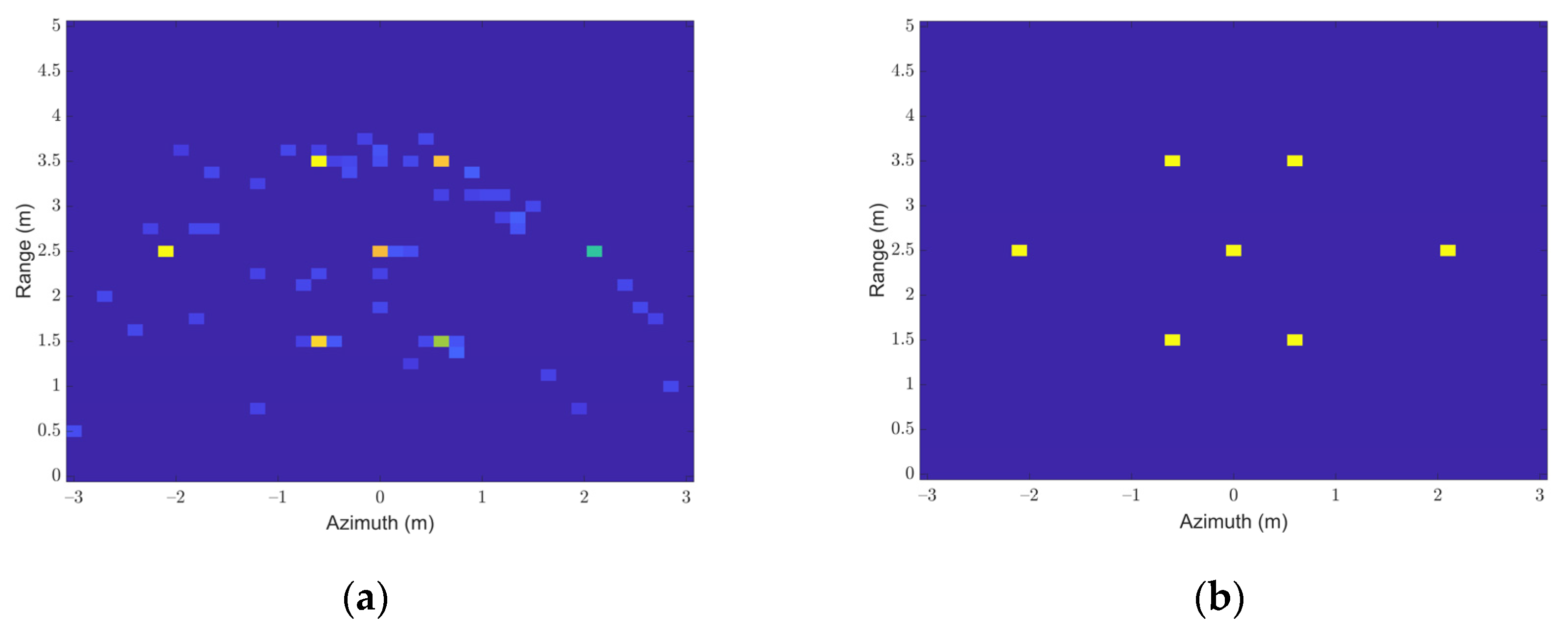
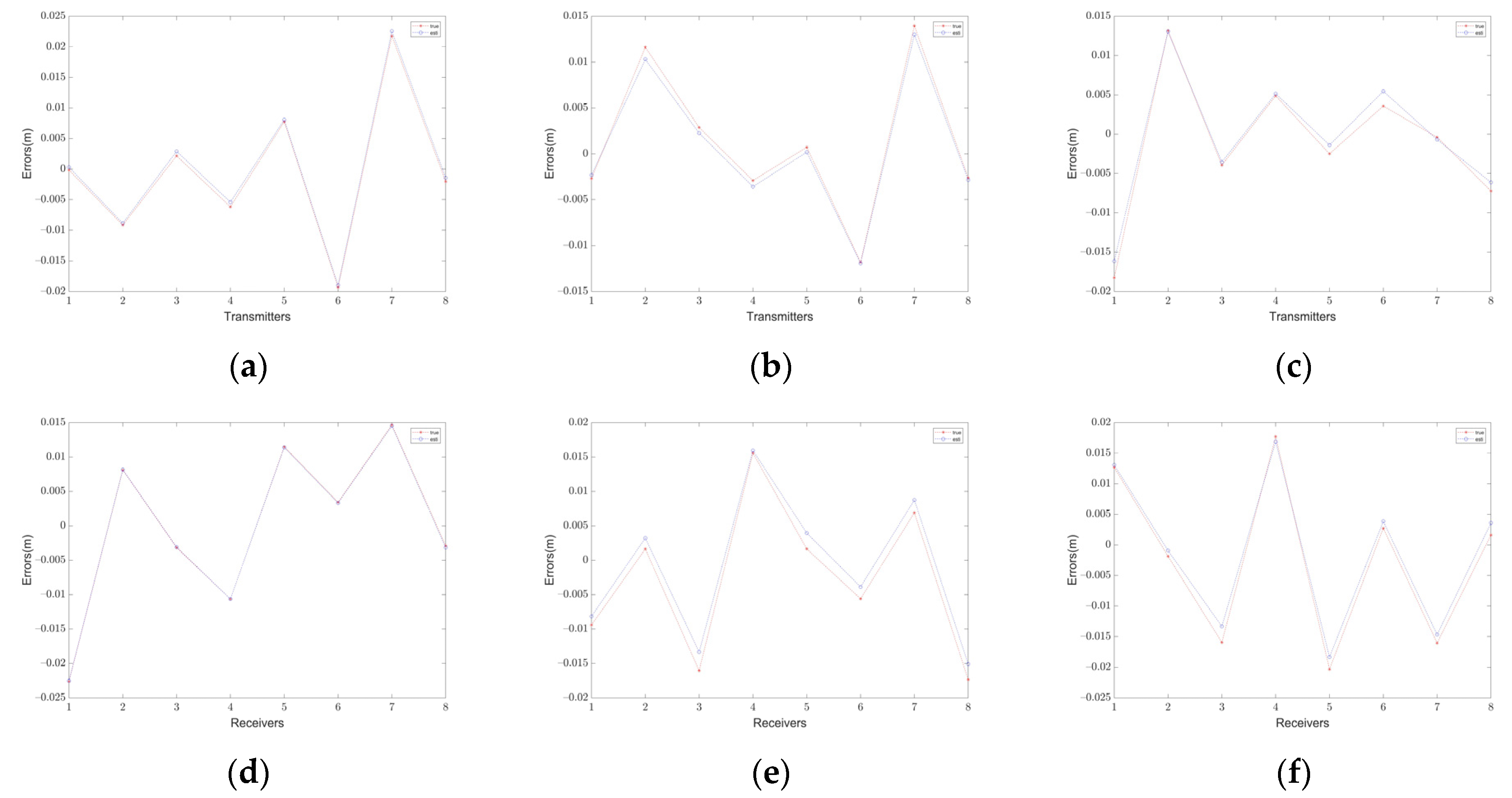
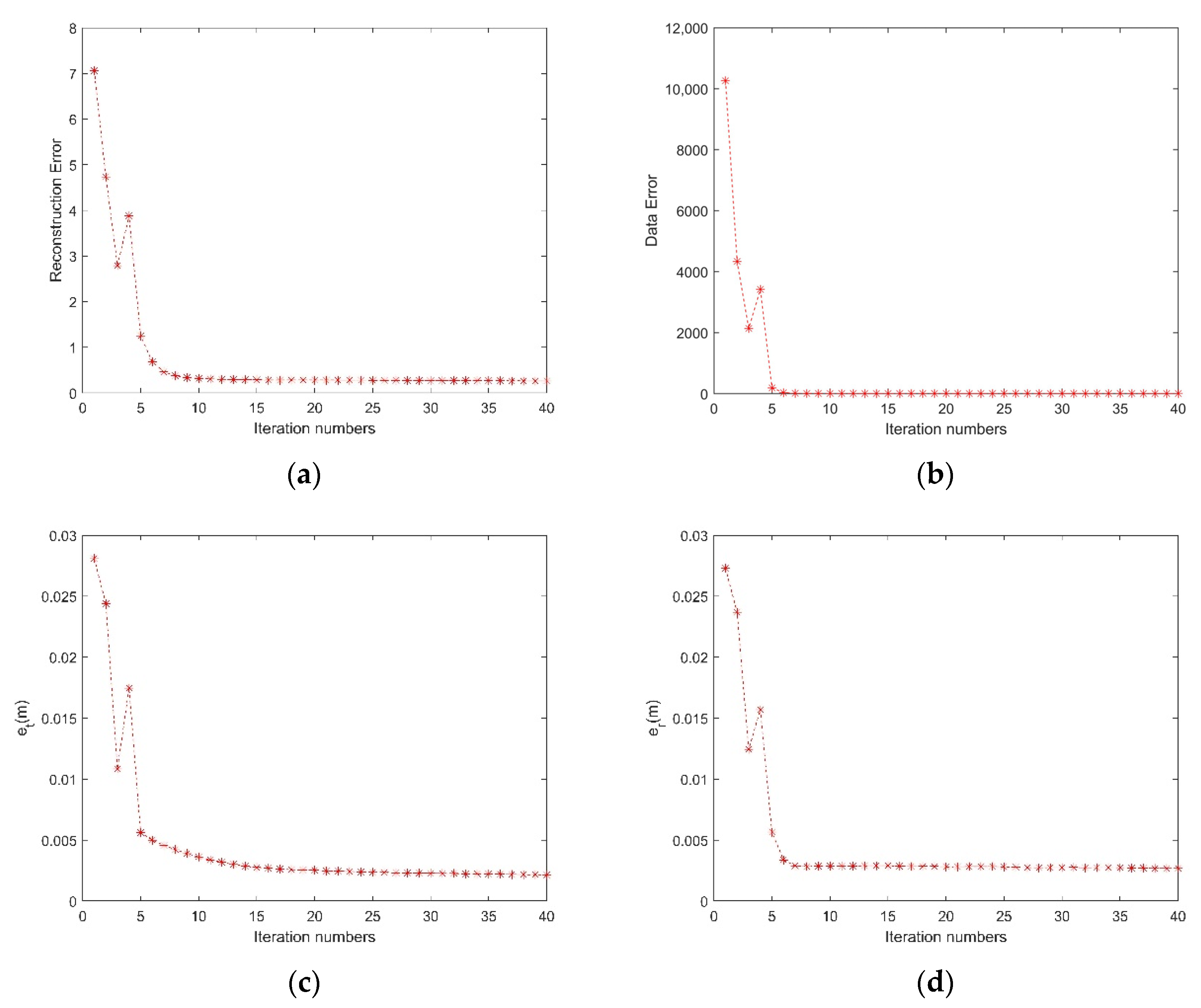
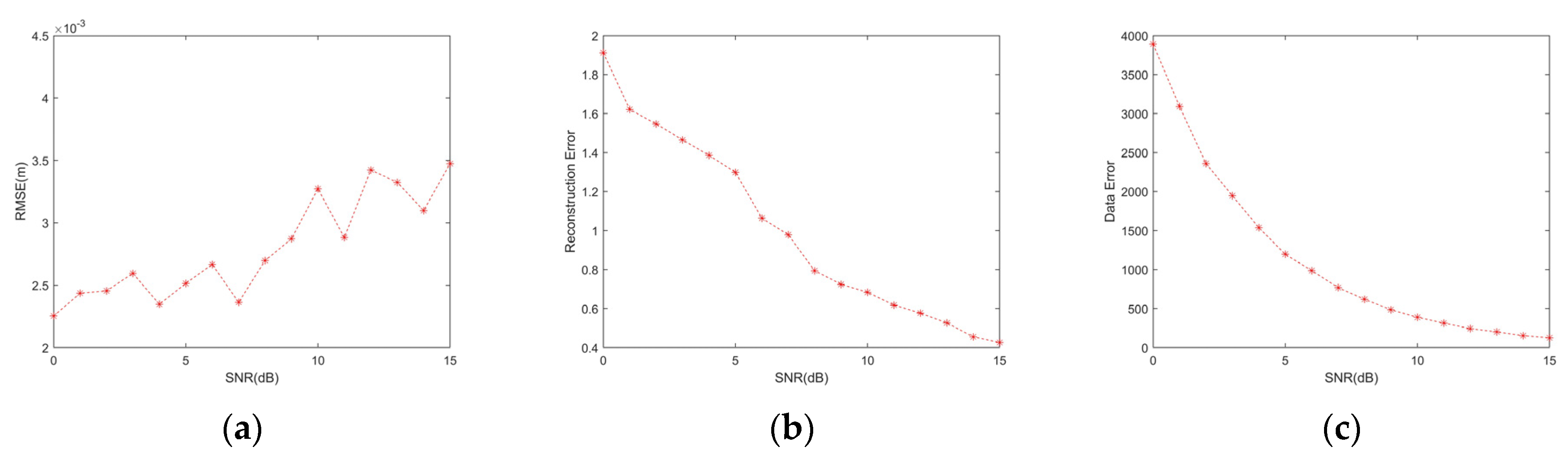
3.1. Simulation
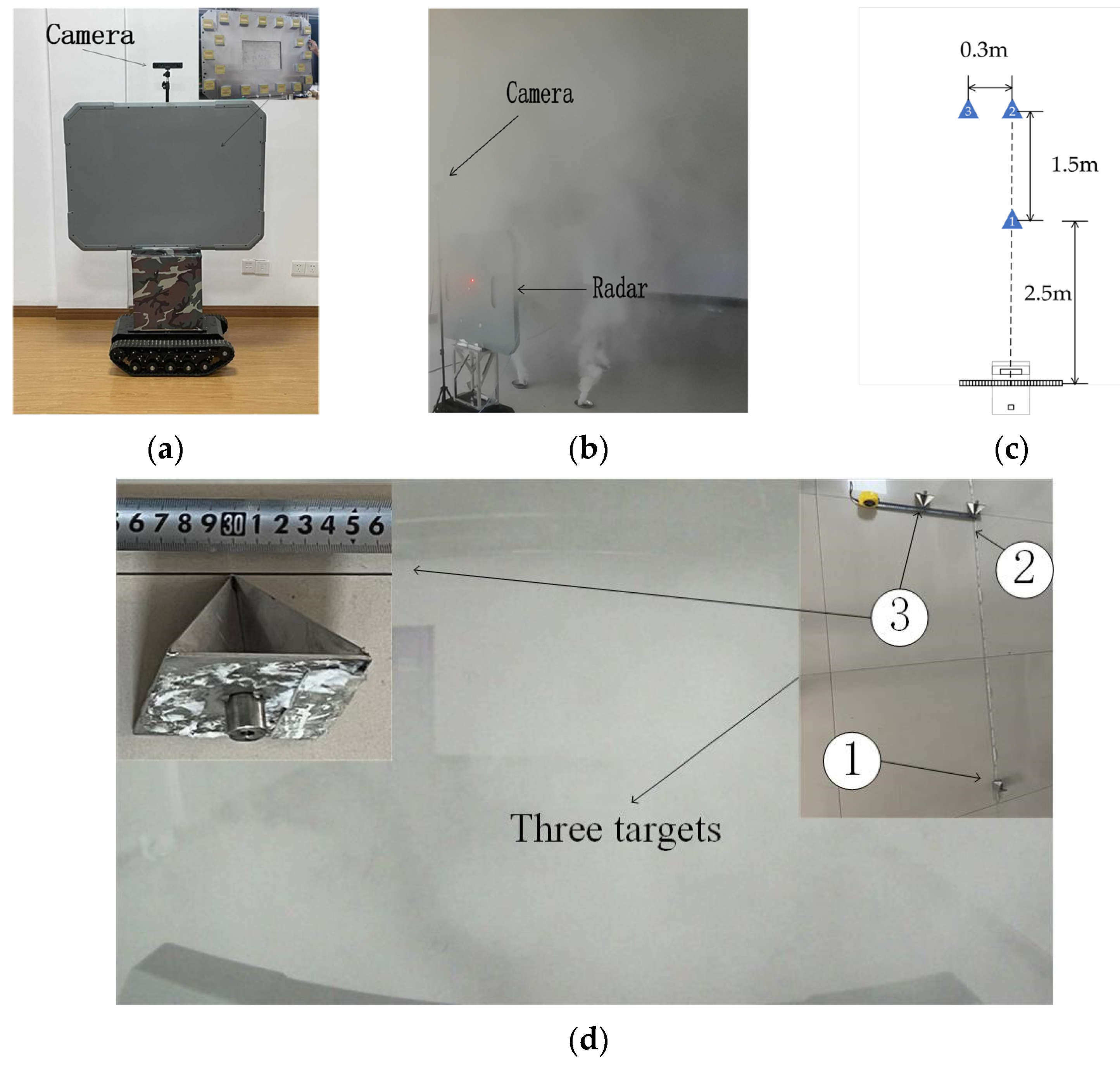
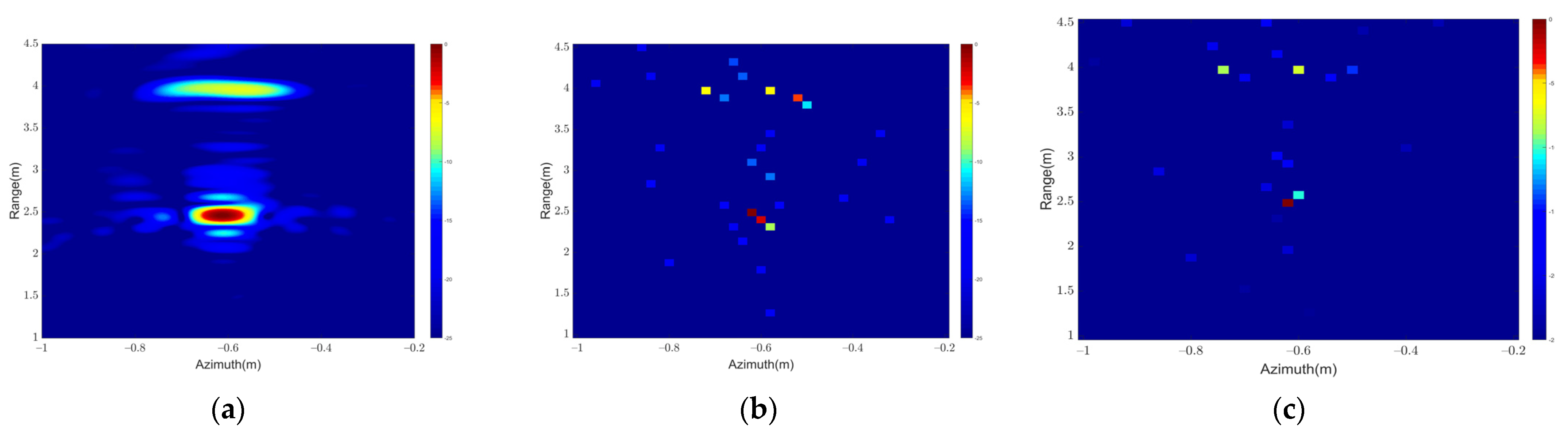
3.2. Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BCD | Block coordinate descent |
| BP | Back projection |
| CS | Compressed sensing |
| GPS | Global positioning system |
| INS | Inertial measurement units |
| ISAR | Inverse synthetic aperture radar |
| MIMO | Multiple-input multiple-output |
| Nadam | Nesterov-accelerated adaptive moment |
| OMP | Orthogonal matching pursuit |
| RCS | Radar cross section |
| RMSE | Root mean square error |
| SAR | Synthetic aperture radar |
| SNR | Signal noise ratio |
| UGV | Unmanned ground vehicles |
Appendix A
References
- Czapla, T.; Wrona, J. Technology development of military applications of unmanned ground vehicles. Stud. Comput. Intell. 2013, 481, 293–309. [Google Scholar] [CrossRef]
- Bekkerman, I.; Tabrikian, J. Target detection and localization using MIMO radars and sonars. IEEE Trans. Signal Process. 2006, 54, 3873–3883. [Google Scholar] [CrossRef]
- Fischer, C.; Younis, M.; Wiesbeck, W. Multistatic GPR data acquisition and imaging. Int. Geosci. Remote Sens. Symp. 2002, 1, 328–330. [Google Scholar] [CrossRef]
- Bradley, M.R.; Witten, T.R.; Duncan, M.; McCummins, R. Mine detection with a forward-looking ground-penetrating synthetic aperture radar. In Detection and Remediation Technologies for Mines and Minelike Targets VIII; International Society for Optics and Photonics: Bellingham, WA, USA, 2003; Volume 5089, p. 334. [Google Scholar] [CrossRef]
- Ressler, M.; Nguyen, L.; Koenig, F.; Wong, D.; Smith, G. The Army Research Laboratory (ARL) synchronous impulse reconstruction (SIRE) forward-looking radar. Unmanned Syst. Technol. IX 2007, 6561, 656105. [Google Scholar] [CrossRef]
- Counts, T.; Gurbuz, A.C.; Scott, W.R.; McClellan, J.H.; Kim, K. Multistatic ground-penetrating radar experiments. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2544–2553. [Google Scholar] [CrossRef]
- Jin, T.; Lou, J.; Zhou, Z. Extraction of landmine features using a forward-looking ground-penetrating radar with MIMO array. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4135–4144. [Google Scholar] [CrossRef]
- Bilik, I.; Longman, O.; Villeval, S.; Tabrikian, J. The Rise of Radar for Autonomous Vehicles: Signal processing solutions and future research directions. IEEE Signal Process. Mag. 2019, 36, 20–31. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhou, X.; Xu, X.; Qin, Y.; Wang, H. Radar Coincidence Imaging with Stochastic Frequency Modulated Array. IEEE J. Sel. Top. Signal Process. 2017, 11, 414–427. [Google Scholar] [CrossRef]
- Ciuonzo, D. On time-reversal imaging by statistical testing. IEEE Signal Process. Lett. 2017, 24, 1024–1028. [Google Scholar] [CrossRef] [Green Version]
- Ciuonzo, D.; Romano, G.; Solimene, R. Performance analysis of time-reversal MUSIC. IEEE Trans. Signal Process. 2015, 63, 2650–2662. [Google Scholar] [CrossRef]
- Devaney, A.J. Time reversal imaging of obscured targets from multistatic data. IEEE Trans. Antennas Propag. 2005, 53, 1600–1610. [Google Scholar] [CrossRef]
- Zhu, R.; Zhou, J.; Cheng, B.; Fu, Q.; Jiang, G. Sequential Frequency-Domain Imaging Algorithm for Near-Field MIMO-SAR with Arbitrary Scanning Paths. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2967–2975. [Google Scholar] [CrossRef]
- Gini, F.; Lombardini, F.; Montanari, M. Layover solution in multibaseline SAR interferometry. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1344–1356. [Google Scholar] [CrossRef]
- Chen, C.; Xiaoling, Z. A new super-resolution 3D-SAR imaging method based on MUSIC algorithm. In Proceedings of the 2011 IEEE RadarCon (RADAR), Kansas City, MO, USA, 23–27 May 2011; pp. 525–529. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Li, H.; Jin, T.; Dai, Y.P. Segmented random sparse MIMO-SAR 3-D imaging based on compressed sensing. In Proceedings of the IET International Radar Conference (IET IRC 2020), Online, 4–6 November 2020; pp. 317–322. [Google Scholar] [CrossRef]
- Suksmono, A.B.; Bharata, E.; Lestari, A.A.; Yarovoy, A.G.; Ligthart, L.P. Compressive stepped-frequency continuous-wave ground-penetrating radar. IEEE Geosci. Remote Sens. Lett. 2010, 7, 665–669. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Tomographic SAR inversion by L1-norm regularization—The compressive sensing approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3839–3846. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Qiao, Z.J.; Xing, M.; Li, Y.; Bao, Z. High-resolution ISAR imaging with sparse stepped-frequency waveforms. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4630–4651. [Google Scholar] [CrossRef]
- Singh, K.B.; Arat, M.A.; Taheri, S. Literature review and fundamental approaches for vehicle and tire state estimation*. Veh. Syst. Dyn. 2019, 57, 1643–1665. [Google Scholar] [CrossRef]
- Guo, H.; Cao, D.; Chen, H.; Lv, C.; Wang, H.; Yang, S. Vehicle dynamic state estimation: State of the art schemes and perspectives. IEEE/CAA J. Autom. Sin. 2018, 5, 418–431. [Google Scholar] [CrossRef]
- Wahl, D.E.; Eichel, P.H.; Ghiglia, D.C.; Jakowatz, C.V. Phase Gradient Autofocus—A Robust Tool for High Resolution SAR Phase Correction. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 827–835. [Google Scholar] [CrossRef] [Green Version]
- Kolman, J. PACE: An autofocus algorithm for SAR. In Proceedings of the IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 310–314. [Google Scholar] [CrossRef]
- Yang, J.; Huang, X.; Jin, T.; Xue, G.; Zhou, Z. An interpolated phase adjustment by contrast enhancement algorithm for SAR. IEEE Geosci. Remote Sens. Lett. 2011, 8, 211–215. [Google Scholar] [CrossRef]
- Xi, L.I. Autofocusing of ISAR images based on entropy minimization. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1240–1252. [Google Scholar] [CrossRef]
- Ye, W.; Yeo, T.S. Weighted least-squares estimation of phase errors for SAR/ISAR autofocus. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2487–2494. [Google Scholar] [CrossRef] [Green Version]
- Cho, H.J.; Munson, D.C. Overcoming polar-format issues in multichannel SAR autofocus. In Proceedings of the 2008 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008; pp. 523–527. [Google Scholar] [CrossRef]
- Liu, K.H.; Munson, D.C. Fourier-domain multichannel autofocus for synthetic aperture radar. IEEE Trans. Image Process. 2011, 20, 3544–3552. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, M.P.; Ammar, S.B. Second order motion compensation for squinted spotlight synthetic aperture radar. In Proceedings of the 2013 Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Tsukuba, Japan, 23–27 September 2013; pp. 202–205. [Google Scholar]
- Kelly, S.I.; Yaghoobi, M.; Davies, M.E. Auto-focus for Compressively Sampled SAR. In Proceedings of the Keynote Speak of 1st International Workshop on Compressed Sensing Applied to Radar (CoSeRa 2012), Bonn, Germany, 14–16 May 2012. [Google Scholar]
- Du, X.; Duan, C.; Hu, W. Sparse representation based autofocusing technique for ISAR images. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1826–1835. [Google Scholar] [CrossRef]
- Ender, J.H.G. Autofocusing ISAR images via sparse representation. In Proceedings of the 9th European Conference on Synthetic Aperture Radar, Nuremberg, Germany, 23–26 April 2012; pp. 203–206. [Google Scholar]
- Yang, J.; Huang, X.; Thompson, J.; Jin, T.; Zhou, Z. Compressed sensing radar imaging with compensation of observation position error. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4608–4620. [Google Scholar] [CrossRef]
- Pu, W.; Wu, J.; Wang, X.; Huang, Y.; Zha, Y.; Yang, J. Joint Sparsity-Based Imaging and Motion Error Estimation for BFSAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1393–1408. [Google Scholar] [CrossRef]
- Mansour, H.; Liu, D.; Kamilov, U.S.; Boufounos, P.T. Sparse Blind Deconvolution for Distributed Radar Autofocus Imaging. IEEE Trans. Comput. Imaging 2018, 4, 537–551. [Google Scholar] [CrossRef] [Green Version]
- Tropp, J.; Gilbert, A. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory. 2007, 53, 4655–4666. [Google Scholar] [CrossRef] [Green Version]
- Dozat, T. Incorporating Nesterov Momentum into Adam. In Proceedings of the 4th International Conference on Learning Representations, Workshop Track, San Juan, Puerto Rico, 2–4 May 2016; pp. 1–4. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Details | References |
|---|---|---|
| Phase errors | Estimating a substituted collection of phase errors in the measured signal | [24,25,26,27,28,29,30,31] |
| Motion errors | Estimating the motion errors in SAR structure | [32] |
| Estimating the motion errors in bistatic-SAR | [33] | |
| Supposing the transmitter and receiver are affected by the same motion error | [34] | |
| Estimating the motion errors the transmitters and receivers of MIMO array | Our method |
| Terms | Value |
|---|---|
| Number of targets | |
| Complexity of OMP | |
| Complexity in step1 | |
| Iterations in step 2 | |
| Complexity of Nadam | |
| Complexity in step 2 | |
| Complexity in step 3 | |
| Computation complexity |
| Parameters | Value |
|---|---|
| Center Frequency | 3 GHz |
| Bandwidth | 2.048 GHz |
| Frequency Interval | 4 MHz |
| Number of Frequencies | 512 |
| Number of Transmitters | 8 |
| Number of Receivers | 8 |
| Selected Frequencies | 64 |
| Scene Azimuth Points | 40 |
| Scene Range Points | 40 |
| Parameters | Value |
|---|---|
| Center Frequency | 2.3 GHz |
| Bandwidth | 1.024 GHz |
| Frequency Interval | 4 MHz |
| Number of Frequencies | 256 |
| Number of Transmitters | 10 |
| Number of Receivers | 10 |
| Selected Frequencies | 64 |
| Scene Azimuth Points | 40 |
| Scene Range Points | 40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Li, S.; Li, Z.; Dai, Y.; Jin, T. Compressed Sensing Imaging with Compensation of Motion Errors for MIMO Radar. Remote Sens. 2021, 13, 4909. https://doi.org/10.3390/rs13234909
Li H, Li S, Li Z, Dai Y, Jin T. Compressed Sensing Imaging with Compensation of Motion Errors for MIMO Radar. Remote Sensing. 2021; 13(23):4909. https://doi.org/10.3390/rs13234909
Chicago/Turabian StyleLi, Haoran, Shuangxun Li, Zhi Li, Yongpeng Dai, and Tian Jin. 2021. "Compressed Sensing Imaging with Compensation of Motion Errors for MIMO Radar" Remote Sensing 13, no. 23: 4909. https://doi.org/10.3390/rs13234909
APA StyleLi, H., Li, S., Li, Z., Dai, Y., & Jin, T. (2021). Compressed Sensing Imaging with Compensation of Motion Errors for MIMO Radar. Remote Sensing, 13(23), 4909. https://doi.org/10.3390/rs13234909