
Flight Experiment Validation of Altitude Measurement Performance of MOSIR on Tianwen-1 Orbiter

 , ,
, ,  , , ,
, , ,  ,
,
Abstract
:
1. Introduction
- To make the passive low-frequency observation in the transfer of the spacecraft into the Mars orbit;
- To obtain the subsurface stratigraphy of Mars, especially the distribution of water and water ice;
- To probe the Martian large-scale altimetry;
- To measure the total electron content of the ionosphere.
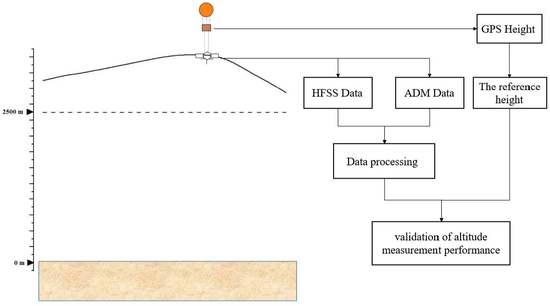
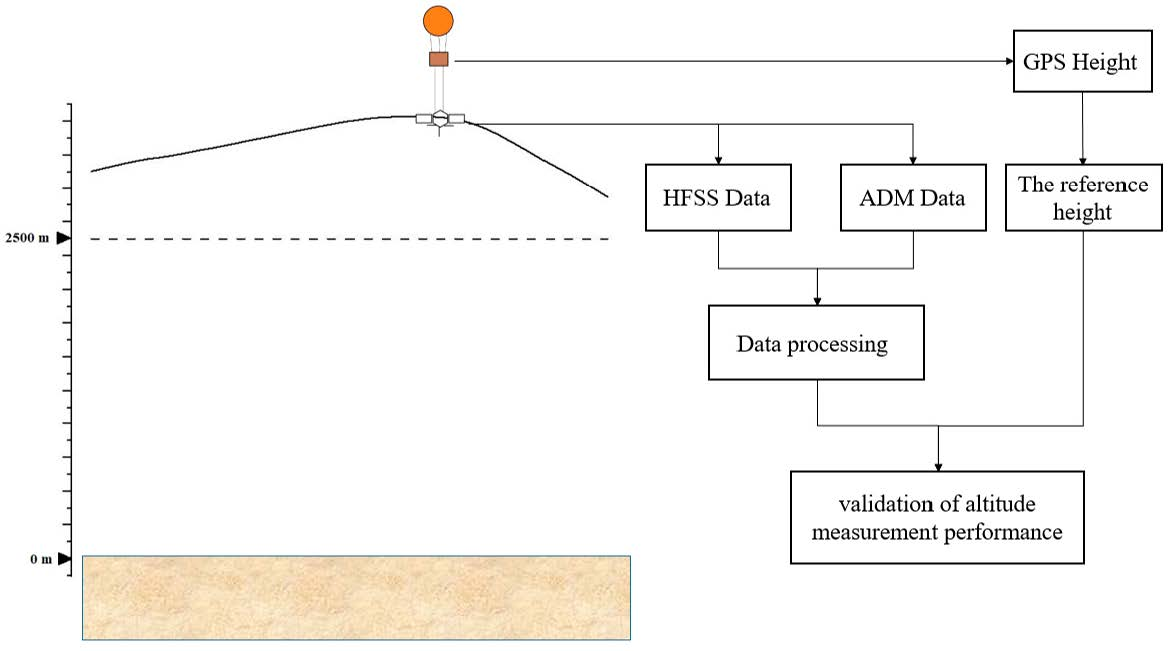
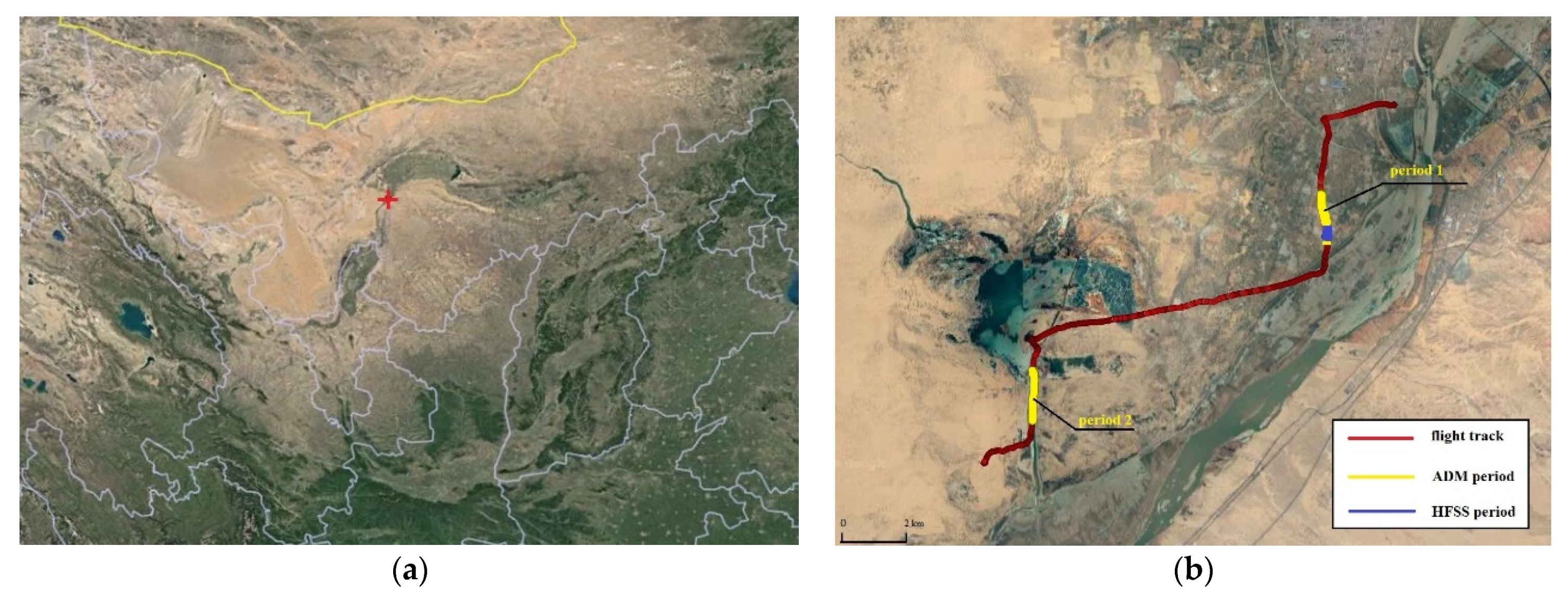
2. The Condition of the Flight Experiment
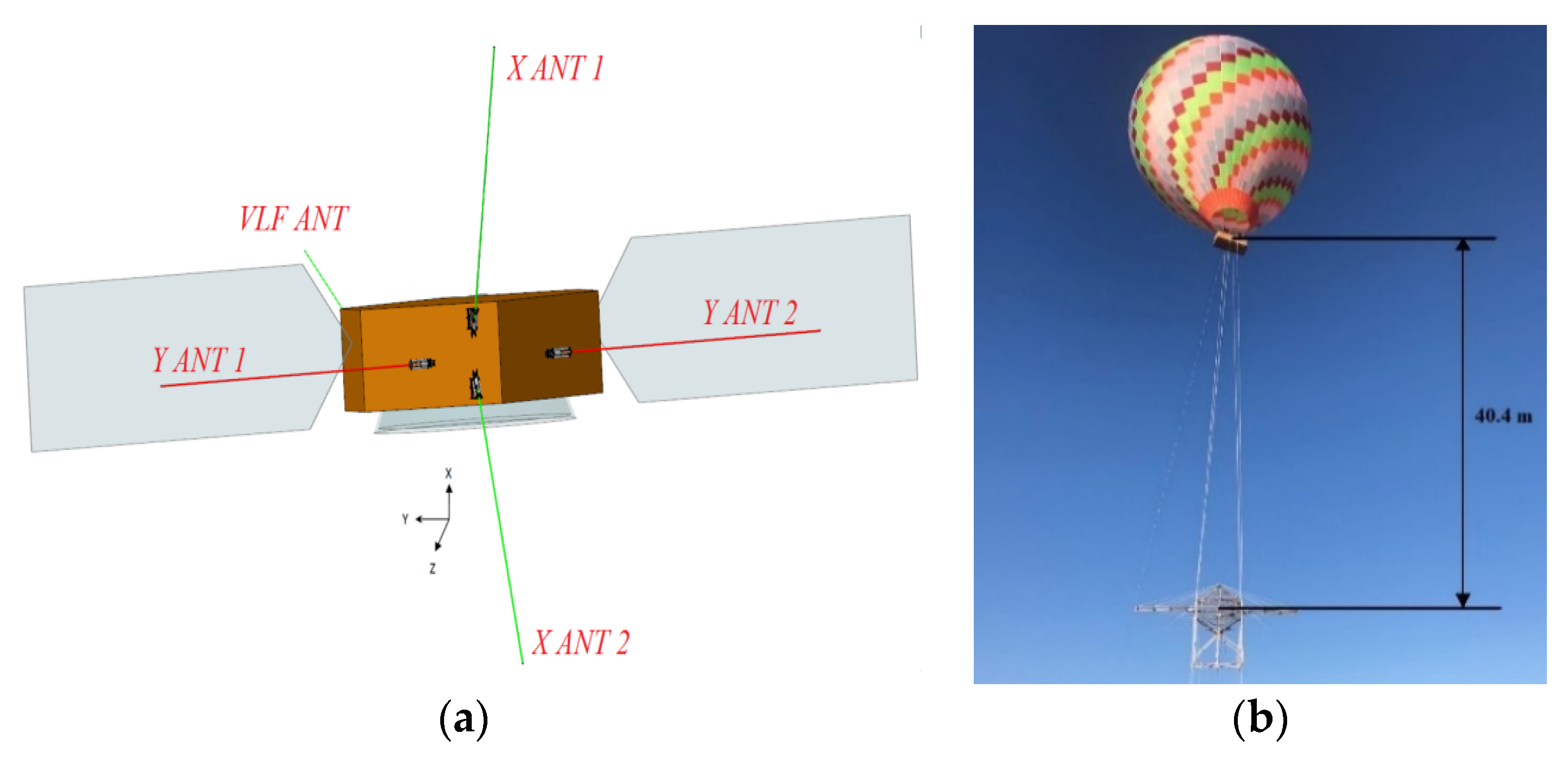
2.1. Experimental Condition
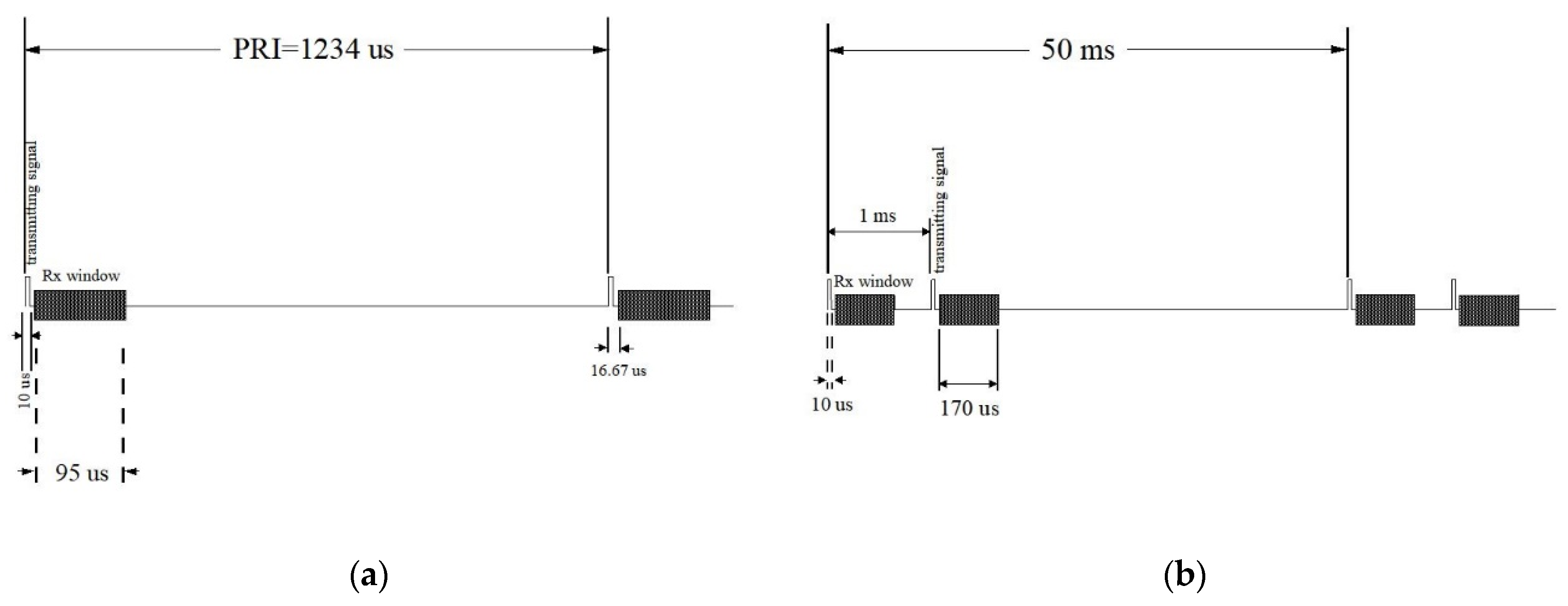
2.2. Radar Settings
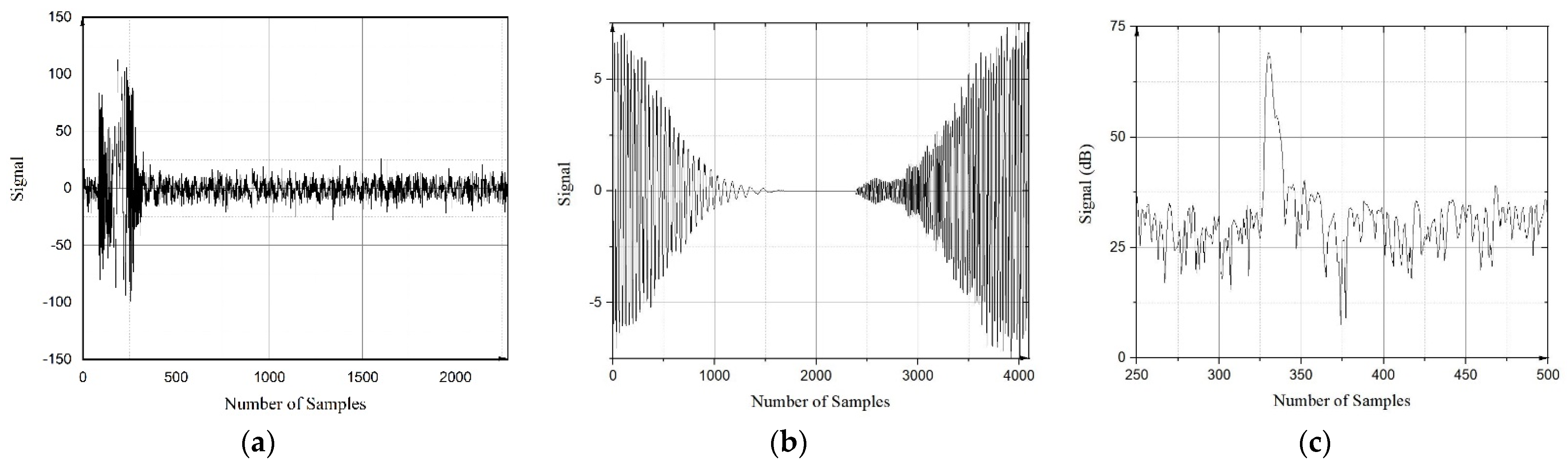
3. Data Processing of the MOSIR Ground Experiment
- The receiving echo:
- The matched filter:
- The output of the matched filter:
- Time-domain output:
- Ground calibration that obtains characteristics of transmitting and receiving antennas;
- Internal loop calibration that obtains characteristics of the Tx/Rx channels;
- The far-field test that measures the whole system response.
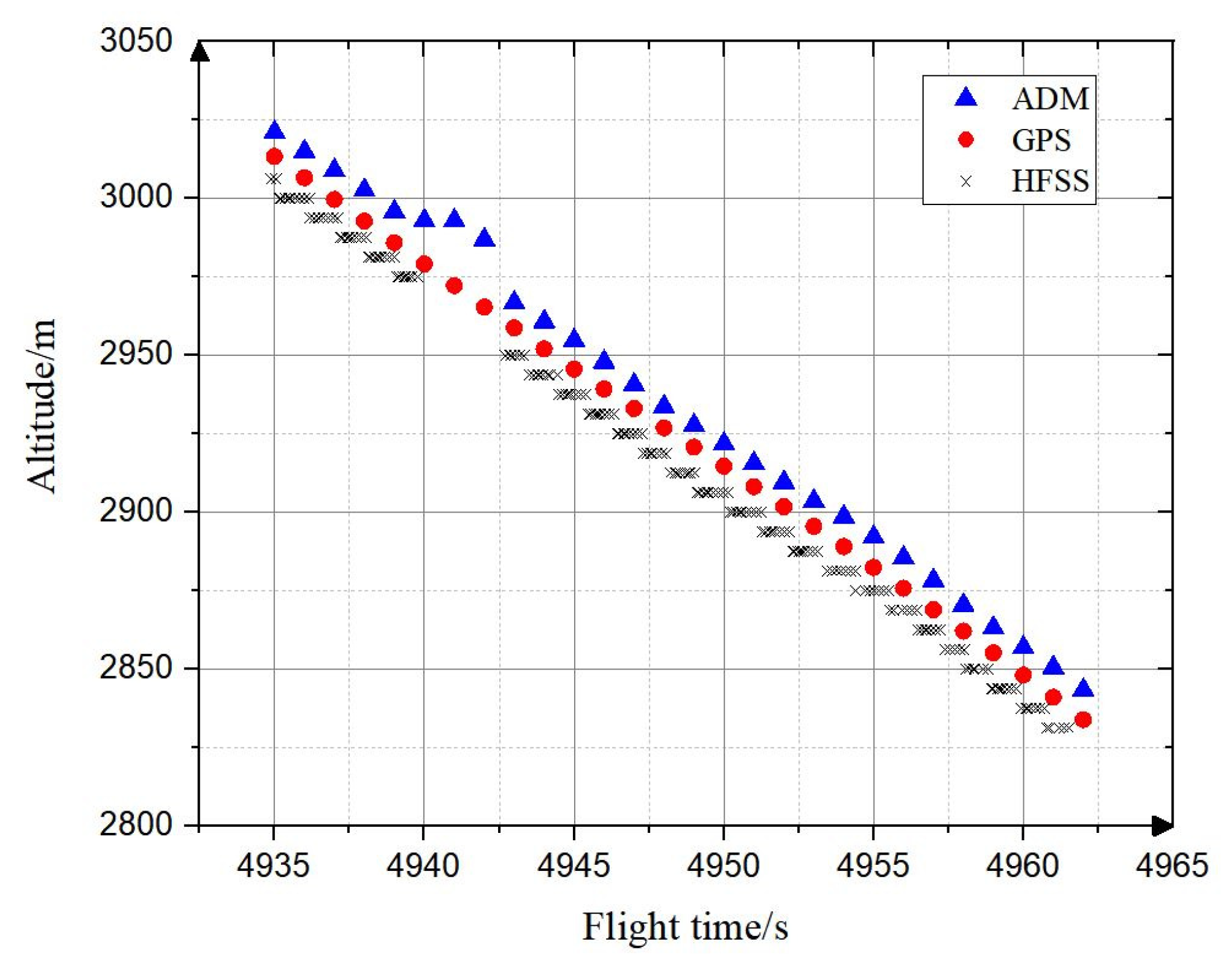
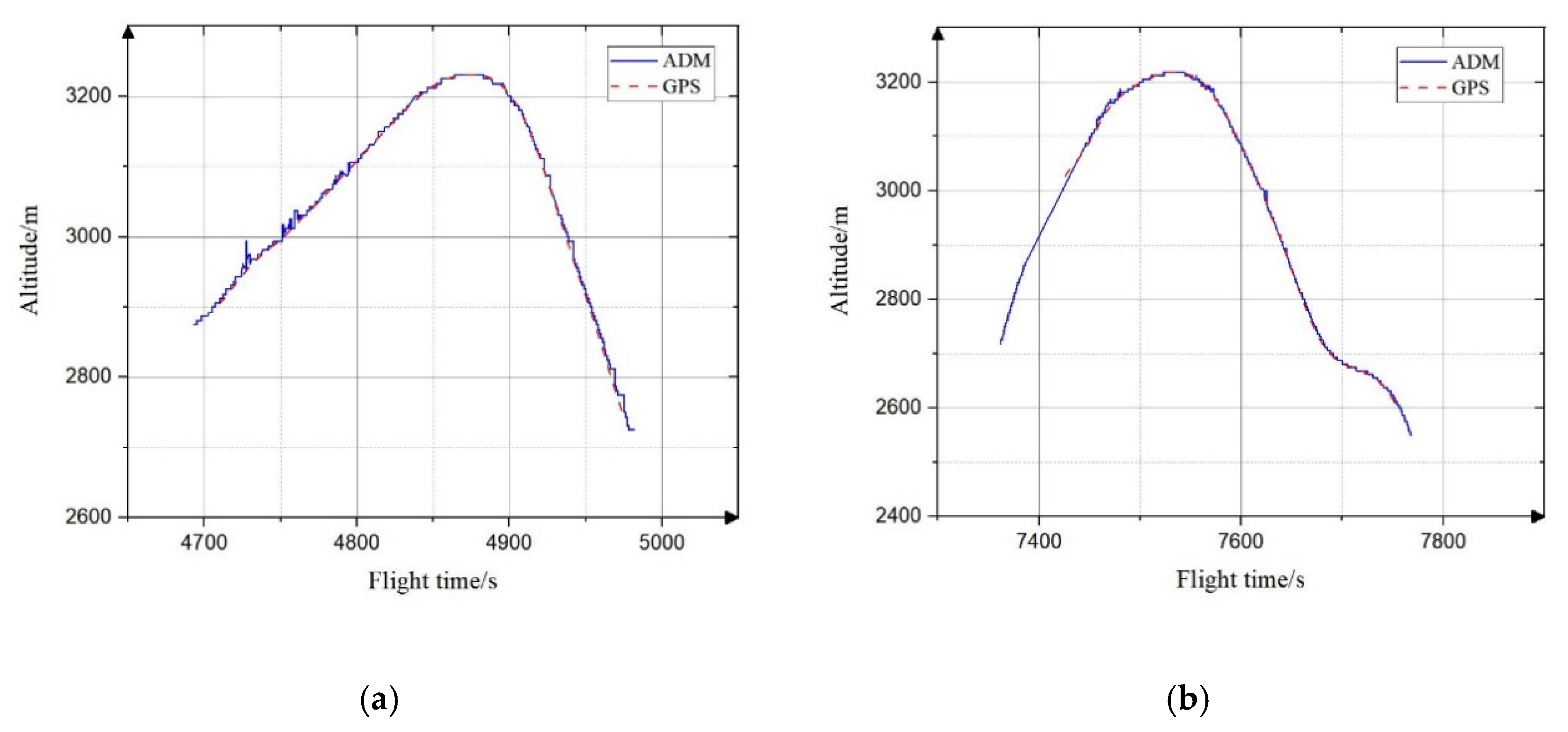
4. Results
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Porcello, L.J.; Jordan, R.L.; Zelenka, J.S.; Adams, G.F.; Phillips, R.J.; Brown, W.E.; Ward, S.H.; Jackson, P.L. The Apollo lunar sounder radar system. Proc. IEEE 1974, 62, 769–783. [Google Scholar] [CrossRef]
- Zou, Y.; Zhu, Y.; Bai, Y.; Wang, L.; Jia, Y.; Shen, W.; Fan, Y.; Liu, Y.; Wang, C.; Zhang, A.; et al. Scientific objectives and payloads of Tianwen-1, China’s first Mars exploration mission. Adv. Space Res. 2021, 67, 812–823. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Geng, Y.; Cao, J.; Zhang, T.; Fang, G.; Yang, J.; Shu, R.; Zou, Y.; Lin, Y. Scientific Objectives and Payload Configuration of China’s First Mars Exploration Mission. J. Deep Space Explor. 2018, 5, 406–413. [Google Scholar] [CrossRef]
- Wan, W.X.; Wang, C.; Li, C.L.; Wei, Y. China’s first mission to Mars. Nat. Astron. 2020, 4, 721. [Google Scholar] [CrossRef]
- Fan, M.; Lyu, P.; Su, Y.; Du, K.; Zhang, Q.; Zhang, Z.; Dai, S.; Hong, T. The Mars Orbiter Subsurface Investigation Radar (MOSIR) on China’s Tianwen-1 Mission. Space Sci. Rev. 2021, 217, 8. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2008; ISBN 9780080951843. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital processing of synthetic aperture radar data. Artech House 2005, 1, 108–110. [Google Scholar]
- Seu, R.; Phillips, R.J.; Biccari, D.; Orosei, R.; Masdea, A.; Picardi, G.; Safaeinili, A.; Campbell, B.A.; Plaut, J.J.; Marinangeli, L.; et al. SHARAD sounding radar on the Mars Reconnaissance Orbiter. J. Geophys. Res. E Planets 2007, 112, E5. [Google Scholar] [CrossRef]
- Jordan, R.; Picardi, G.; Plaut, J.; Wheeler, K.; Kirchner, D.; Safaeinili, A.; Johnson, W.; Seu, R.; Calabrese, D.; Zampolini, E.; et al. The Mars express MARSIS sounder instrument. Planet. Space Sci. 2009, 57, 1975–1986. [Google Scholar] [CrossRef]
- Orosei, R.; Jordan, R.L.; Morgan, D.D.; Cartacci, M.; Cicchetti, A.; Duru, F.; Gurnett, D.A.; Heggy, E.; Kirchner, D.L.; Noschese, R.; et al. Mars Advanced Radar for Subsurface and Ionospheric Sounding (MARSIS) after nine years of operation: A summary. Planet. Space Sci. 2015, 112, 98–114. [Google Scholar] [CrossRef]
- Croci, R.; Seu, R.; Flamini, E.; Russo, E. The shallow RADar (SHARAD) Onboard the NASA MRO mission. Proc. IEEE 2011, 99, 794–807. [Google Scholar] [CrossRef]
- Seu, R.; Biccari, D.; Orosei, R.; Lorenzoni, L.V.; Phillips, R.J.; Marinangeli, L.; Picardi, G.; Masdea, A.; Zampolini, E. SHARAD: The MRO 2005 shallow radar. Planet. Space Sci. 2004, 52, 157–166. [Google Scholar] [CrossRef]
- Picardi, G.; Biccari, D.; Seu, R.; Marinangeli, L.; Johnson, W.T.K.; Jordan, R.L.; Plaut, J.; Safaenili, A.; Gurnett, D.A.; Ori, G.G.; et al. Performance and surface scattering models for the Mars Advanced Radar for Subsurface and Ionosphere Sounding (MARSIS). Planet. Space Sci. 2004, 52, 149–156. [Google Scholar] [CrossRef]
- Orosei, R.; Lauro, S.E.; Pettinelli, E.; Cicchetti, A.; Coradini, M.; Cosciotti, B.; Di Paolo, F.; Flamini, E.; Mattei, E.; Pajola, M.; et al. Radar evidence of subglacial liquid water on Mars. Science 2018, 361, 490–493. [Google Scholar] [CrossRef] [Green Version]
- Lauro, S.E.; Pettinelli, E.; Caprarelli, G.; Guallini, L.; Rossi, A.P.; Mattei, E.; Cosciotti, B.; Cicchetti, A.; Soldovieri, F.; Cartacci, M.; et al. Multiple subglacial water bodies below the south pole of Mars unveiled by new MARSIS data. Nat. Astron. 2021, 5, 63–70. [Google Scholar] [CrossRef]
- Stuurman, C.M.; Osinski, G.R.; Holt, J.W.; Levy, J.S.; Brothers, T.C.; Kerrigan, M.; Campbell, B.A. SHARAD detection and characterization of subsurface water ice deposits in Utopia Planitia, Mars. Geophys. Res. Lett. 2016, 43, 9484–9491. [Google Scholar] [CrossRef] [Green Version]
- Holt, J.W.; Safaeinili, A.; Plaut, J.J.; Head, J.W.; Phillips, R.J.; Seu, R.; Kempf, S.D.; Choudhary, P.; Young, D.A.; Putzig, N.E.; et al. Radar sounding evidence for buried glaciers in the southern mid-latitudes of Mars. Science 2008, 322, 1235–1238. [Google Scholar] [CrossRef] [Green Version]
- Plaut, J.J.; Safaeinili, A.; Holt, J.W.; Phillips, R.J.; Head, J.W.; Seu, R.; Putzig, N.E.; Frigeri, A. Radar evidence for ice in lobate debris aprons in the mid-northern latitudes of Mars. Geophys. Res. Lett. 2009, 36, 5–8. [Google Scholar] [CrossRef] [Green Version]
- Fois, F.; Croci, R.; Seu, R.; Picardi, G.; Flamini, E. Performance results of the SHARAD instrument. Int. Geosci. Remote Sens. Symp. 2007, 119–124. [Google Scholar] [CrossRef]
- Pirrotta, S.; Flamini, E. SoRa first flight. Summer 2009. Mem. Soc. Astron. Ital. Suppl. 2011, 16, 145. [Google Scholar]
- Watters, T.R.; Campbell, B.; Carter, L.; Leuschen, C.J.; Plaut, J.J.; Picardi, G.; Orosei, R.; Safaeinili, A.; Clifford, S.M.; Farrell, W.M.; et al. Radar sounding of the medusae fossae formation mars: Equatorial ice or dry, low-density deposits? Science 2007, 318, 1125–1128. [Google Scholar] [CrossRef] [Green Version]
- Campbell, B.; Carter, L.; Phillips, R.; Plaut, J.; Putzig, N.; Safaeinili, A.; Seu, R.; Biccari, D.; Egan, A.; Orosei, R. SHARAD radar sounding of the Vastitas Borealis Formation in Amazonis Planitia. J. Geophys. Res. E Planets 2008, 113, E12. [Google Scholar] [CrossRef] [Green Version]
- Cartacci, M.; Amata, E.; Cicchetti, A.; Noschese, R.; Giuppi, S.; Langlais, B.; Frigeri, A.; Orosei, R.; Picardi, G. Mars ionosphere total electron content analysis from MARSIS subsurface data. Icarus 2013, 223, 423–437. [Google Scholar] [CrossRef]
- Rahman, H. Pulse Compression Radar. Fundam. Princ. Radar 2019, 2, 131–154. [Google Scholar] [CrossRef]
- Fois, F.; Mecozzi, R.; Iorio, M.; Calabrese, D.; Bombaci, O.; Catallo, C.; Croce, A.; Croci, R.; Guelfi, M.; Zampolini, E. Comparison between MARSIS & SHARAD results. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 2134–2139. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Central frequency | 40 MHz |
| Frequency bandwidth | 20 MHz |
| Transmitted power | 3 W |
| Pulse length | 10 μs |
| data time window | 95 μs (HFSS), 170 μs (ADM) |
| Operational altitude | 2500 m–3300 m |
| Total mass | 26 kg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, T.; Su, Y.; Fan, M.; Dai, S.; Lv, P.; Ding, C.; Zhang, Z.; Wang, R.; Liu, C.; Du, W.; et al. Flight Experiment Validation of Altitude Measurement Performance of MOSIR on Tianwen-1 Orbiter. Remote Sens. 2021, 13, 5049. https://doi.org/10.3390/rs13245049
Hong T, Su Y, Fan M, Dai S, Lv P, Ding C, Zhang Z, Wang R, Liu C, Du W, et al. Flight Experiment Validation of Altitude Measurement Performance of MOSIR on Tianwen-1 Orbiter. Remote Sensing. 2021; 13(24):5049. https://doi.org/10.3390/rs13245049
Chicago/Turabian StyleHong, Tiansheng, Yan Su, Mingyi Fan, Shun Dai, Peng Lv, Chunyu Ding, Zongyu Zhang, Ruigang Wang, Chendi Liu, Wei Du, and et al. 2021. "Flight Experiment Validation of Altitude Measurement Performance of MOSIR on Tianwen-1 Orbiter" Remote Sensing 13, no. 24: 5049. https://doi.org/10.3390/rs13245049
APA StyleHong, T., Su, Y., Fan, M., Dai, S., Lv, P., Ding, C., Zhang, Z., Wang, R., Liu, C., Du, W., Liu, S., & Li, C. (2021). Flight Experiment Validation of Altitude Measurement Performance of MOSIR on Tianwen-1 Orbiter. Remote Sensing, 13(24), 5049. https://doi.org/10.3390/rs13245049