
A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices




Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. GPR Equipment for Transport Infrastructures Surveying
2.1. GPR with Horn Antennas
2.2. GPR with Dipole Antennas
2.3. GPR with Antennas Array Multi-Channel
3. Overview on GPR in Roads and Airports
3.1. Roads
3.2. Airports
4. Overview on GPR in Railways
4.1. Ballasted Railways (Superstructure and Substructure)
4.2. Ballastless Railways
5. Overview on GPR in Retaining Walls
- Gravity retaining walls, which are massive and require a significant gravity load to be stable under the soil horizontal pressures. These structures can be built with concrete, masonry, stone or precast concrete boxes filled with coarse material structures.
- Cantilever retaining walls that are usually built using concrete and reinforced with prestress concrete. These walls are composed of the stem and a base slab as a foundation. This is the most usual type.
- Anchored retaining walls, composed of the stem and cables anchored with concrete in the ground.
- Piled retaining walls, built with adjacent piles, making a wall.
6. Overview on GPR in Bridges
6.1. Stone Masonry Arch Bridges
6.2. Concrete Bridges
7. Overview on GPR in Tunneling
- Identification of depth and presence of insulation material [208].
8. Discussion Table on Limitations and Best Practices
8.1. Roads and Airports
8.1.1. Soil Subgrade Assessment and the Detection of Bedrock
- Analysis of new road alignments, studying the ground materials and the depth to the bedrock and to the water table, reaching in some cases a depth of about 5 m.
8.1.2. Pavement Layer Thickness Analysis
8.1.3. Damage Assessment: Detection of Voids and Cracks
8.1.4. Damage Assessment: Debonding
8.1.5. Damage Assessment: Moisture
8.1.6. Quality Control of New Structures: Asphalt Air Void Content and Segregation
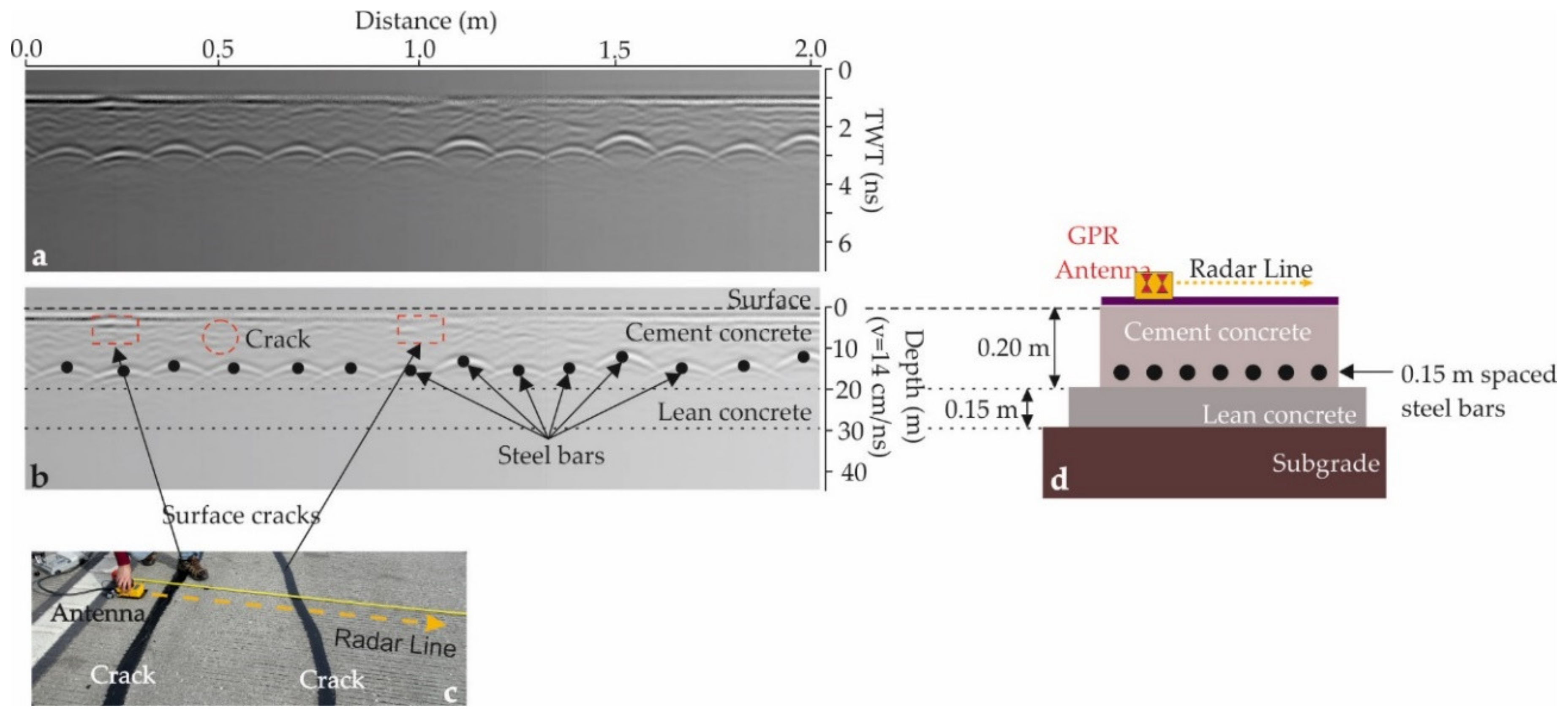
8.1.7. Rebar Detection and Corrosion
8.1.8. Recent Developments and Applications
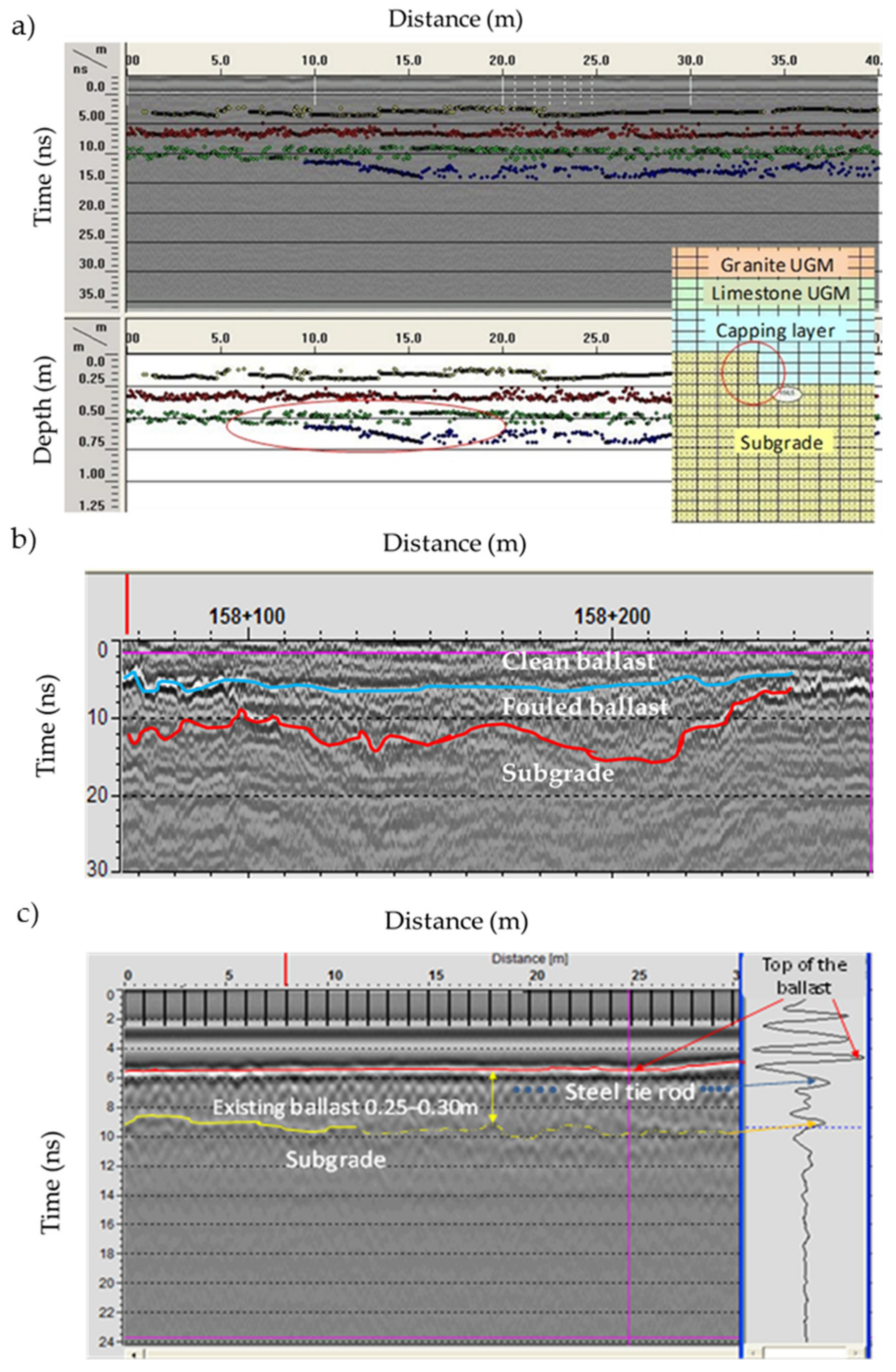
8.2. Railways Inspection
- Measuring below clay or very clayish layers.
- The presence of steel sleepers in railways [287].
- The gradual increase in fouling in depth that make the interface between the ballast and soil undetectable.
- The rail presence that, as a metal, can result in a constant reflection, masking in most cases the information at the depth corresponding to the distance between the antenna and the rail (e.g., if the lateral antennas are too close to the rail, the measurement in depth becomes very difficult as the rail reflection is strong and in many cases a ringing effect appears).
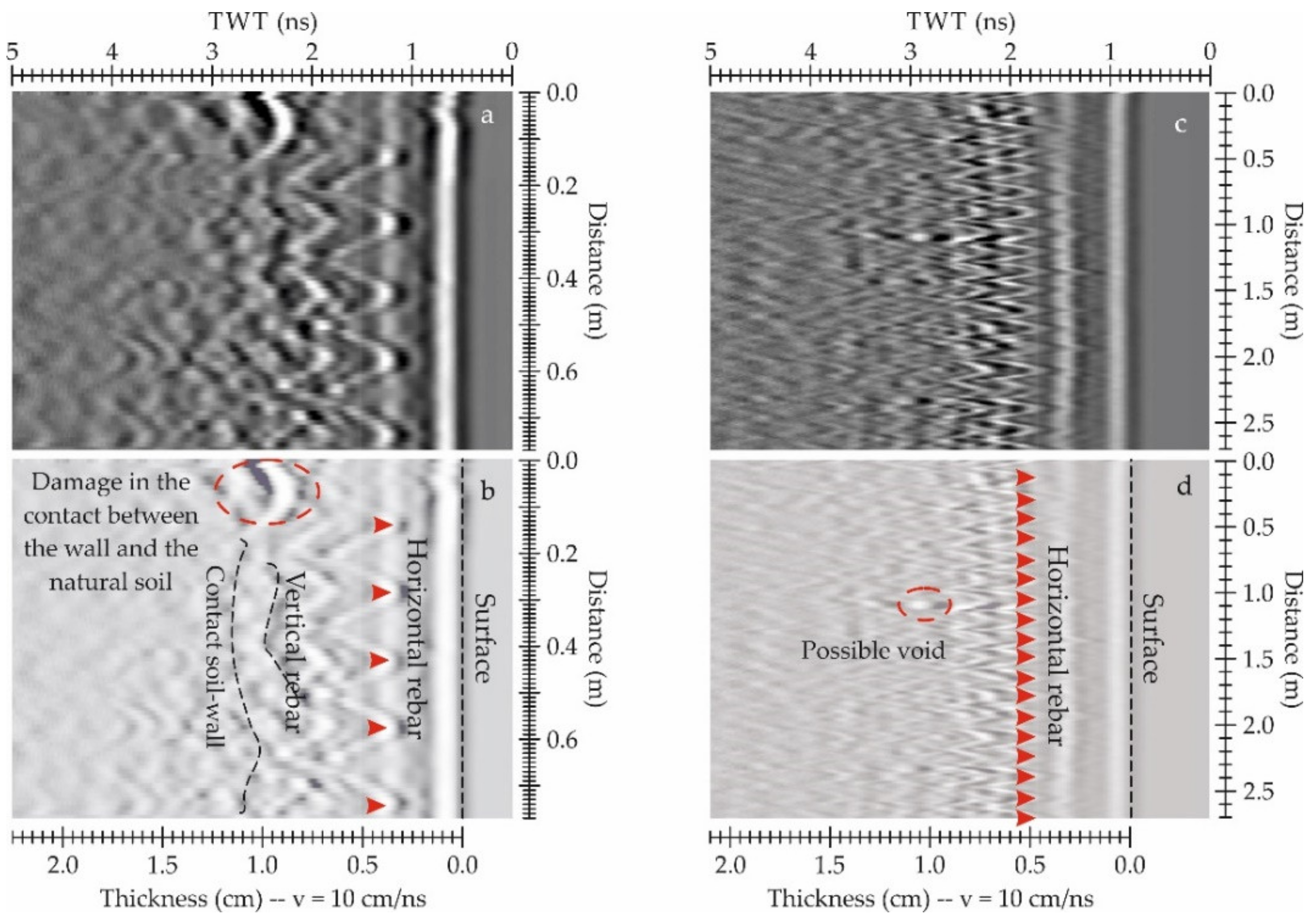
8.3. Retaining Walls
8.4. Bridges Health Assessment
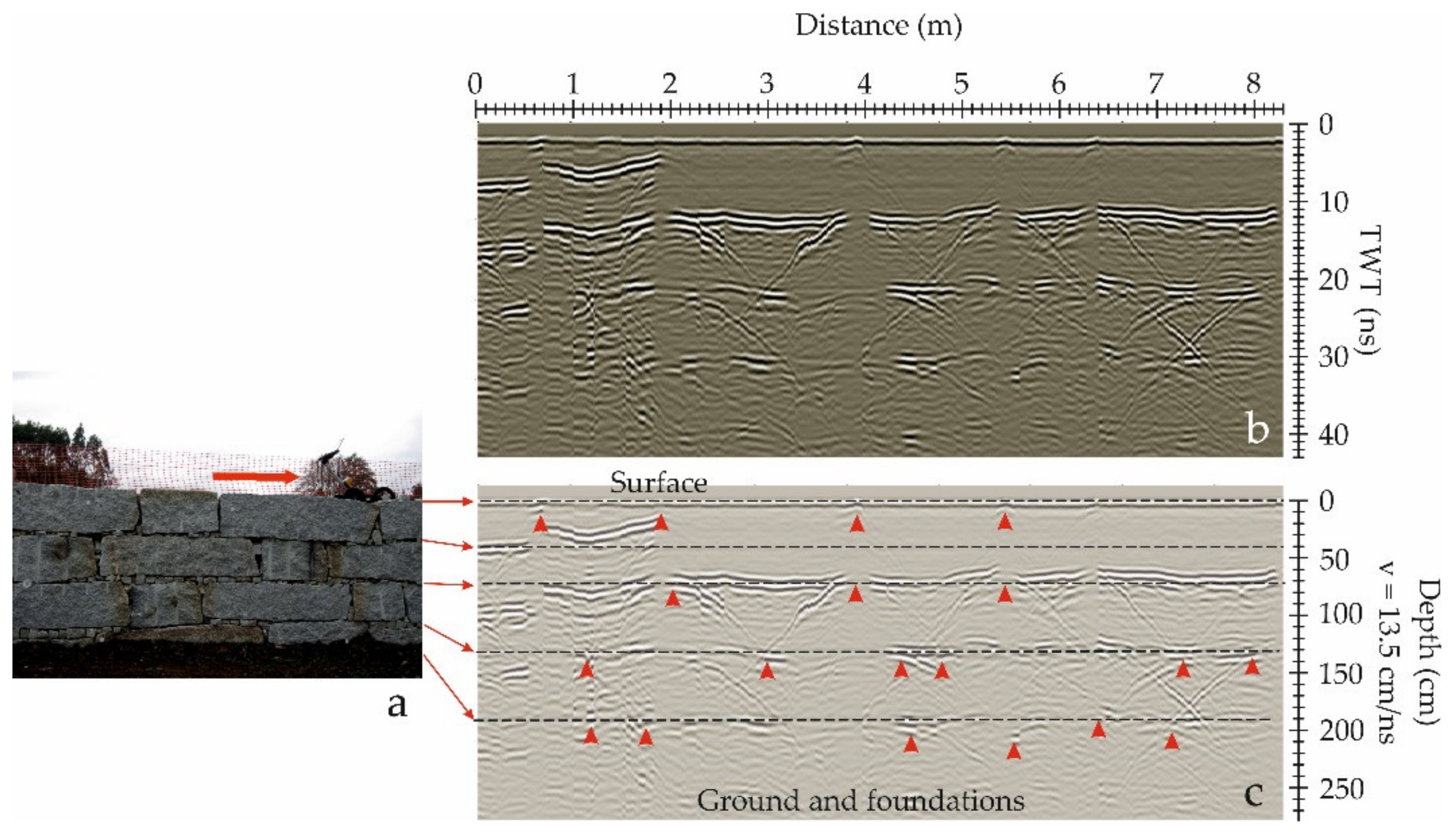
8.4.1. Stone Masonry Arch Bridges
8.4.2. Concrete Bridges
8.5. Tunneling Inspection
9. Final Remarks and Future Perspectives
- GEOFIT [352] aims to develop a compact GPR for mapping the underground with an accurate positioning measurement device (e.g., GNSS). Regarding the processing, a retrofitting approach is studied, namely to search for meaningful features in the GPR data. For this purpose, based on the library of patterns of interest developed in this project, the pattern that best fits in the GPR image is found. In this way, a higher level of automation will be achieved through automatic recognition of objects and patterns. An additional objective of GEOFIT is to integrate models of retrofitted buildings and construction sites (as-built BIM) with models of the underground situation.
- Asset4Rail [353] aims “to developing a set of cost efficient and cutting-edge asset-specific measuring and monitoring devices… The information collected by such devices will then be processed to generate relevant maintenance infrastructure-related information to support asset management decision.” One of the main outputs expected from the project is to develop a new product for the NDT inspection of tunnel lining based on GPR, LiDAR and thermal cameras, as well as to develop and validate the drone inspection of tunnels and bridges. Additionally, a future trend is to integrate the monitoring data into BIM models, mainly for tunnels and bridges, enabling maintenance decisions function. “The resulting integrated BIM environment will contain all current capabilities - a 3D BIM model carrying geometry, design information, quantities etc., together with relevant linked documents, 5D costs, 6D maintenance plans and similar – as well as a new capability for sensory readings, both real-time and historical, enabling this data to be displayed side-by-side with all other relevant asset and maintenance information, 3D model data and properties.”
- IM-SAFE [354] aims to support the European Commission (EC) and the European Committee for Standardization (CEN) to prepare a new standard in monitoring for optimal maintenance and safety of transport infrastructure based on consolidated and accepted knowledge and experience in the EU and worldwide. Aligned with the topic of this article, IM-SAFE includes the review of surveying technologies used in the condition evaluation and diagnosis of bridges and tunnels (satellite imaging, LiDAR, NDT active and passive testing technologies (such as GPR among others)). Moreover, procedures will be adopted for determining damage detection indicators and actions on structures in risk and safety analysis based on condition survey data, as well as procedures for data quality assurance and digitalization (use of BIM, predictive twin and other digital innovations).
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Annan, P. GPR Principles, Procedures & Applications; Sensors and Software Inc.: Mississauga, ON, Canada, 2003; p. 278. [Google Scholar]
- Daniels, D.J. Ground Penetrating Radar; The institution of Electrical Engineers: London, UK, 2004; p. 726. [Google Scholar]
- Jol, H.M. Ground Penetrating Radar: Theory and Applications; Elsevier Science: Amsterdam, The Netherlands, 2009; p. 544. [Google Scholar]
- ASTM International. ASTM D6432-19, Standard Guide for Using the Surface Ground Penetrating Radar Method for Subsurface Investigation; ASTM International: West Conshohocken, PA, USA, 2019; Available online: www.astm.org (accessed on 11 February 2021). [CrossRef]
- Department for Transport, Highway Agency. DMRB 3.1.7.: Design Manual for Roads and Bridges, Advice Notes on the Non-Destructive Testing of Highway Structures—Advice Note 3.5 BA 86/2006: Ground Penetrating Radar (GPR), UK; Department for Transport, Highway Agency: Birmingham, UK, 2006; ISBN 0115527788. [Google Scholar]
- Highway Agency. DMRB 7.3.2.: Design Manual for Roads and Bridges, Data for Pavement Assessment—Annex 6 HD 29/2008: Ground-Penetrating Radar (GPR), UK; Highway Agency: Birmingham, UK, 2008. [Google Scholar]
- European GPR Association. GS1601: The European GPR Association Guidelines for Pavement Structural Surveys; European GPR Association, 2016. [Google Scholar]
- Comitato Elettrotecnico Italiano. CEI 306-8: Impiego del Radar per Introspezione del Suolo per Prospezioni ad Opera di Posa di Servizi ed Infrastrutture Sotterranee; Comitato Elettrotecnico Italiano: Milano, MI, USA, 2004. [Google Scholar]
- Morey, R.M. Continuous subsurface profiling by impulse radar. In Proceedings of the Conference on Subsurface Exploration for Underground Excavation and Heavy Construction, Henniken, NH, United States, 11–16 August 1974; American Society of Civil Engineers: Reston, VA, USA, 1974; pp. 213–232. [Google Scholar]
- Morey, R.M. Detection of subsurface cavities by ground penetrating radar. Highw. Geol. Symp. 1976, 27, 28–30. [Google Scholar]
- Caldecott, R.; Poirier, M.; Scofea, D.; Svoboda, D.E.; Terzuoli, A.J. Underground mapping of utility lines using impulse radar. Inst. Electr. Eng. Proc. F Commun. Radar Signal Process. 1988, 135, 343–361. [Google Scholar] [CrossRef]
- Osumi, N.; Ueno, K. Detection of buried plant. Inst. Electr. Eng. Proc. F Commun. Radar Signal Process. 1988, 135, 330–342. [Google Scholar] [CrossRef]
- Hironaka, M.C.; Hitchcock, R.D.; Forrest, J.B. Detection of Voids Underground and Under Pavements; Report No. CEL-TN-1449; Naval Civil Engineering Laboratory: Port Hueneme, CA, USA, 1976. [Google Scholar]
- Kovacs, A.; Morey, R.M. Detection of Cavities under Concrete Pavement; Report No. CRREL 83-18; Cold Regions Research and Engineering Laboratory, Department of the Army: Hanover, Germany, 1983. [Google Scholar]
- Benedetto, A.; Pajewski, L. Civil Engineering Applications of Ground Penetrating Radar; Springer Transactions in Civil and Environmental Engineering; Springer International: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Wai-Lok Lai, W.; Dérobert, X.; Annan, P. A Review of Ground Penetrating Radar Application in Civil Engineering: A 30-Year Journey from Locating and Testing to Imaging and Diagnosis. NDT E Int. 2018, 96, 58–78. [Google Scholar] [CrossRef]
- Pajewski, L.; Fontul, S.; Solla, M. Ground-penetrating radar for the evaluation and monitoring of transport infrastructures. In Innovation in Near-Surface Geophysics. Instrumentation, Application, and Data Processing Methods; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar] [CrossRef]
- FORMAT poject “Fully Optimised Road Maintenance”. In Assessment of High Speed Monitoring Prototype Equipment; Deliverable Report D12; 2004.
- Hopman, V.; Beuving, E. Repeatability, reproducibility and accuracy of GPR measurements. In Proceedings of the 6th International Conference on BCRRA, Lisbon, Portugal, 24–26 June 2002; Branco, C., Ed.; Balkema: Lisbon, Portugal, 2002. [Google Scholar]
- Highways Agency. Pavement Design and Maintenance. Pavement Maintenance Assessment. Structural Assessment Methods; DMRB Volume 7 Section 3 Part 2 (HD 29/94); The Stationary Office: London, UK, 2001. [Google Scholar]
- Lorenzo, H.; Rial, F.I.; Pereira, M.; Solla, M. A full non-metallic trailer for GPR road surveys. J. Appl. Geophys. 2011, 75, 490–497. [Google Scholar] [CrossRef]
- Plati, C.; Loizos, A. Using ground-penetrating radar for assessing the structural needs of asphalt pavements. Nondestruct. Test. Eval. 2012, 27, 273–284. [Google Scholar] [CrossRef]
- AASHTO. Part 2. Chapter 5. Evaluation of Existing Pavements for Rehabilitation. In National Cooperative Highway Research Program 1-37A: Guide for Mechanistic-Empirical Design of New and Rehabilitated Pavement Structures; AASHTO: Washington, DC, USA, 2004. [Google Scholar]
- Maser, K.; Scullion, T.; Briggs, R.C. Use of Radar Technology for Pavement Layer Evaluation; Research Report 0930-SF; Research Study Number 2-18-88-930; Texas Transportation Institute, Texas University: Austin, TX, USA, 1991. [Google Scholar]
- Al-Qadi, I.L.; Hazim, O.A.; Su, W.; Riad, S.M. Dielectric properties of Portland cement concrete at low radio frequencies. J. Mater. Civ. Eng. 1995, 7, 192–198. [Google Scholar] [CrossRef]
- Tannous, B.S. Investigation of Electrical Properties of Earth Materials by Ground Penetrating Radar. Retrospective Theses and Dissertations. Master’s Thesis, University of Central Florida, Oviedo, FL, USA, 1987; p. 5082. Available online: https://stars.library.ucf.edu/rtd/5082 (accessed on 11 February 2021).
- Robert, A. Dielectric permittivity of concrete between 50 MHz and 1 GHz and GPR measurements for building materials evaluation. J. Appl. Geophys. 1998, 40, 89–94. [Google Scholar] [CrossRef]
- Saarenketo, T. Using ground-penetrating radar and dielectric probe measurements in pavement density quality control. Transp. Res. Rec. 1997, 1575, 34–41. [Google Scholar] [CrossRef]
- Maser, K.R. Ground Penetrating Radar Surveys to Characterize Pavement Layer Thickness Variations at GPS Sites (No. SHRP-P-397); Strategic Highway Research Program, National Research Council: Washington, DC, USA, 1994.
- Gordon, M.O.; Broughton, K.; Hardy, M.S.A. The assessment of the value of GPR imaging of flexible pavements. NDT E Int. 1998, 31, 429–438. [Google Scholar] [CrossRef]
- Maser, K.R.; Scullion, T. Automated Pavement Subsurface Profiling Using Radar: Case Studies of Four Experimental Field Sites; Transportation Research Record 1344; Texas Transportation Institute, Texas A&M University: Bryan, TX, USA, 1992. [Google Scholar]
- Maser, K.R. Condition assessment of transportation infrastructure using ground-penetrating radar. J. Infrastruct. Syst. 1996, 2, 94–101. [Google Scholar] [CrossRef]
- Hugenschmidt, J.; Partl, M.N.; De Witte, H. GPR inspection of a mountain motorway in Switzerland. J. Appl. Geophys. 1998, 40, 95–104. [Google Scholar] [CrossRef]
- Grote, K.; Hubbard, S.; Harvey, J.; Rubin, Y. Evaluation of infiltration in layered pavements using surface GPR reflection techniques. J. Appl. Geophys. 2005, 57, 129–153. [Google Scholar] [CrossRef]
- Benedetto, A. Water content evaluation in unsaturated soil using GPR signal analysis in the frequency domain. J. Appl. Geophys. 2010, 71, 26–35. [Google Scholar] [CrossRef]
- Loizos, A.; Plati, C. Accuracy of pavement thicknesses estimation using different ground penetrating radar analysis approaches. NDT E Int. 2007, 40, 147–157. [Google Scholar] [CrossRef]
- Varela-González, M.; Solla, M.; Martínez-Sánchez, J.; Arias, P. A semi-automatic processing and visualisation tool for ground-penetrating radar pavement thickness data. Autom. Constr. 2014, 45, 42–49. [Google Scholar] [CrossRef]
- Lahouar, S.; Al-Qadi, I.L. Automatic detection of multiple pavement layers from GPR data. NDT E Int. 2008, 41, 69–81. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, S.; Al-Qadi, I.L. Continuous real-time monitoring of flexible pavement layer density and thickness using ground penetrating radar. NDT E Int. 2018, 100, 48–54. [Google Scholar] [CrossRef]
- Solla, M.; Lagüela, S.; González-Jorge, H.; Arias, P. Approach to identify cracking in asphalt pavement using GPR and infrared thermographic methods: Preliminary findings. NDT E Int. 2014, 62, 55–65. [Google Scholar] [CrossRef]
- Rasol, M.A.; Pérez-Gracia, V.; Fernandes, F.M.; Pais, J.C.; Santos-Assunçao, S.; Santos, C.; Sossa, V. GPR laboratory tests and numerical models to characterize cracks in cement concrete specimens, exemplifying damage in rigid pavement. Measurement 2020, 158, 107662. [Google Scholar] [CrossRef]
- Rasol, M.A.; Pérez-Gracia, V.; Solla, M.; Pais, J.C.; Fernandes, F.M.; Santos, C. An experimental and numerical approach to combine Ground Penetrating Radar and computational modelling for the identification of early cracking in cement concrete pavements. NDT E Int. 2020, 115, 102293. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Ortuani, B.; Giudici, M.; Mele, M. Mapping the spatial variation of soil moisture at the large scale using GPR for pavement applications. Near Surf. Geophys. 2015, 13, 269–278. [Google Scholar] [CrossRef]
- Fernandes, F.M.; Fernandes, A.; Pais, J. Assessment of the density and moisture content of asphalt mixtures of road pavements. Constr. Build. Mater. 2017, 154, 1216–1225. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, X.; Li, W.; Zhang, S.; Jia, Y. Automatic detection of moisture damages in asphalt pavements from GPR data with deep CNN and IRS method. Autom. Constr. 2020, 113, 103119. [Google Scholar] [CrossRef]
- Zhao, S.; Al-Qadi, I. Pavement drainage pipe condition assessment by GPR image reconstruction using FDTD modeling. Constr. Build. Mater. 2017, 154, 1283–1293. [Google Scholar] [CrossRef]
- Pedret-Rodes, J.; Martínez-Reguero, A.; Pérez-Gracia, V. GPR Spectra for Monitoring Asphalt Pavements. Remote Sens. 2020, 12, 1749. [Google Scholar] [CrossRef]
- Rodés, J.P.; Perez-Gracia, V.; Martínez-Reguero, A. Evaluation of the GPR frequency spectra in asphalt pavement assessment. Constr. Build. Mater. 2015, 96, 181–188. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Deng, Z.; Han, F.; Xia, Y.; Liu, Q.H.; Sato, M. Time-frequency analysis of air-coupled GPR data for identification of delamination between pavement layers. Constr. Build. Mater. 2017, 154, 1207–1215. [Google Scholar] [CrossRef]
- ASTM. Standard Test Method for Determining the Thickness of Bound Pavement Layers Using Short-Pulse Radar; Non-destructive testing of pavement structures; ASTM D4748; ASTM: West Conshohocken, PA, USA, 2004. [Google Scholar]
- Saarenketo, T. Recommendations for guidelines for the use of GPR in asphalt air voids content measurement. Mara Nord Project; Europeiska Unionen: Brussels, Belgium, 2012. [Google Scholar]
- Pajewski, L.; Vrtunski, M.; Bugarinovic, Ž.; Ristic, A.; Govedarica, M.; Van der Wielen, A.; Grégoire, C.; Van Geem, C.; Dérobert, X.; Borecky, V.; et al. GPR system performance compliance according to COST Action TU1208 guidelines. Ground Penetrating Radar 2018, 1, 104–122. [Google Scholar] [CrossRef]
- ASTM. ASTM D6087-08(2015)e1. In Standard Test Method for Evaluating Asphalt-Covered Concrete Bridge Decks Using Ground Penetrating Radar; ASTM International: West Conshohocken, PA, USA, 2015; Available online: www.astm.org (accessed on 11 February 2021). [CrossRef]
- Silva, L.A.; Borges, W.R.; Cunha, L.S.; Branco, M.G.C.; Farias, M.M. Use of GPR to identify metal bars and layer thickness in a rigid pavement. Geotech. Geophys. Site Charact. 2013, 4, 1341–1346. [Google Scholar]
- Al-Qadi, I.L.; Lahouar, S. Measuring rebar cover depth in rigid pavements with ground-penetrating radar. Transp. Res. Rec. 2005, 1907, 80–85. [Google Scholar] [CrossRef]
- Rasol, M.A.; Pérez-Gracia, V.; Fernandes, F.M.; Pais, J.C.; Solla, M.; Santos, C. NDT assessment of rigid pavement damages with ground penetrating radar: Laboratory and field tests. Int. J. Pavement Eng. 2020, 1–16. [Google Scholar] [CrossRef]
- Alani, A.M.; Lantini, L. Recent Advances in Tree Root Mapping and Assessment Using Non-destructive Testing Methods: A Focus on Ground Penetrating Radar. Surv. Geophys. 2020, 41, 605–646. [Google Scholar] [CrossRef]
- Vafidis, A.; Economou, N.; Dimitriadis, K. Time varying zero-phase filtering of GPR data for imaging pavement layers. In Proceedings of the 73rd EAGE Conference and Exhibition Incorporating SPE EUROPEC 2011 (pp. cp-238), Vienna, Austria, 23–27 May 2011; European Association of Geoscientists & Engineers: Houten, The Netherlands, 2011. [Google Scholar] [CrossRef]
- Grégoire, C.; Van Geem, C. Use of radar in road investigation BRRC experience. In Proceedings of the 7th International Workshop on Advanced Ground Penetrating Radar, Nantes, France, 2–5 July 2013; IEEE: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Lahouar, S. Measuring layer thicknesses with GPR–Theory to practice. Constr. Build. Mater. 2005, 19, 763–772. [Google Scholar] [CrossRef]
- Le Bastard, C.; Baltazart, V.; Wang, Y.; Saillard, J. Thin-pavement thickness estimation using GPR with high-resolution and superresolution methods. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2511–2519. [Google Scholar] [CrossRef]
- Loulizi, A.; Al-Qadi, I.L.; Lahouar, S. Optimization of ground-penetrating radar data to predict layer thicknesses in flexible pavements. J. Transp. Eng. 2003, 129, 93–99. [Google Scholar] [CrossRef]
- Liu, H.; Sato, M. In situ measurement of pavement thickness and dielectric permittivity by GPR using an antenna array. NDT E Int. 2014, 64, 65–71. [Google Scholar] [CrossRef]
- Stryk, J. Road diagnostics-ground penetrating radar possibilities. Intersectii/Intersect. 2008, 5, 48–57. [Google Scholar]
- Diamanti, N.; Redman, D. Field observations and numerical models of GPR response from vertical pavement cracks. J. Appl. Geophys. 2012, 81, 106–116. [Google Scholar] [CrossRef]
- Krysiński, L.; Sudyka, J. GPR abilities in investigation of the pavement transversal cracks. J. Appl. Geophys. 2013, 97, 27–36. [Google Scholar] [CrossRef]
- Fernandes, F.M.; Pais, J.C. Laboratory observation of cracks in road pavements with GPR. Constr. Build. Mater. 2017, 154, 1130–1138. [Google Scholar] [CrossRef]
- Torbaghan, M.E.; Li, W.; Metje, N.; Burrow, M.; Chapman, D.N.; Rogers, C.D. Automated detection of cracks in roads using ground penetrating radar. J. Appl. Geophys. 2020, 179, 104118. [Google Scholar] [CrossRef]
- Saarenketo, T.; Scullion, T. Road evaluation with ground penetrating radar. J. Appl. Geophys. 2000, 43, 119–138. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Lahouar, S.; Loulizi, A. Successful application of ground-penetrating radar for quality assurance-quality control of new pavements. Transp. Res. Rec. 2003, 1861, 86–97. [Google Scholar] [CrossRef]
- Saarenketo, T. Measuring Electromagnetic Properties of Asphalt for Pavement Quality Control and Defect Mapping; Roadscanners: Ravaniemi, Finland, 2009. [Google Scholar]
- Poikajärvi, J.; Peisa, K.; Herronen, T.; Aursand, P.O.; Maijala, P.; Narbro, A. GPR in road investigations–equipment tests and quality assurance of new asphalt pavement. Nondestruct. Test. Eval. 2012, 27, 293–303. [Google Scholar] [CrossRef]
- Grote, K.; Hubbard, S.; Rubin, Y. GPR monitoring of volumetric water content in soils applied to highway construction and maintenance. Lead. Edge 2002, 21, 482–504. [Google Scholar] [CrossRef] [Green Version]
- Plati, C.; Loizos, A. Estimation of in-situ density and moisture content in HMA pavements based on GPR trace reflection amplitude using different frequencies. J. Appl. Geophys. 2013, 97, 3–10. [Google Scholar] [CrossRef]
- Fontul, S. Structural Evaluation of Flexible Pavements Using Non-Destructive Tests. Ph.D. Thesis, University of Coimbra, Coimbra, Portugal, 2004. [Google Scholar]
- Song, X.; Wu, R.; Liu, J. Underground diseases identification of airport runway using GPR. In Proceedings of the Progress in Electromagnetics Research, Xi’an, China, 22–26 March 2010; Volume 93. [Google Scholar]
- Graczyk, M.; Krysinski, L.; Topczewski, Ł.; Sudyka, J. The use of three-dimensional analysis of GPR data in evaluation of operational safety of airfield pavements. Transp. Res. Procedia 2016, 14, 3704–3712. [Google Scholar] [CrossRef] [Green Version]
- Ni, J.C.; Cheng, W.C. Trial grouting under rigid pavement: A case history in Magong Airport, Penghu. J. Test. Eval. 2012, 40, 107–118. [Google Scholar] [CrossRef]
- Doler, D.; Kovačič, B. Improved decision-making geo-information system for continuous monitoring of deformations on airport infrastructure. Isprs Int. J. Geo-Inf. 2019, 8, 1. [Google Scholar] [CrossRef] [Green Version]
- Marecos, V.; Fontul, S.; Antunes, M.L.; Solla, M. Assessment of a concrete pre-stressed runway pavement with ground penetrating radar. In Proceedings of the 8th International Workshop on Advanced Ground Penetrating Radar (IWAGPR), Florence, Italy, 7–10 July 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Yi, L.; Zou, L.; Sato, M. Practical approach for high-resolution airport pavement inspection with the Yakumo multistatic array ground-penetrating radar system. Sensors 2018, 18, 2684. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Borges, W.R.; da Silva, L.A.; da Cunha, L.S.; Branco, R.M.G.C.; de Farias, M.M. GPR Applied to Rigid Pavement from Santos Dumont Airport, RJ. Braz. J. Geophys. 2014, 32, 225–234. [Google Scholar] [CrossRef] [Green Version]
- Mocnik, A.; Dossi, M.; Forte, E.; Zambrini, R.; Zamariolo, A.; Pipan, M. Ground Penetrating Radar applications for roads and airport pavements investigations. Geophysics 2015, 56, 951–960. [Google Scholar]
- Fontul, S.; Antunes, M.L.; Fortunato, E.; Oliveira, M. Practical application of GPR in transport infrastructure survey. In Proceedings of the International Conference on Advanced Characterisation of Pavement and Soil Engineering Materials, Athens, Greece, 20–22 June 2007. [Google Scholar]
- Zou, L.; Yi, L.; Sato, M. On the use of lateral wave for the interlayer debonding detecting in an asphalt airport pavement using a multistatic GPR system. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4215–4224. [Google Scholar] [CrossRef] [Green Version]
- Kadioglu, S. Research of the sea-filled airport OGU in the Black Sea, Turkey, using ground penetrating radar method. Constr. Build. Mater. 2018, 158, 1123–1133. [Google Scholar] [CrossRef]
- Jørgensen, A.S.; Andreasen, F. Mapping of permafrost surface using ground-penetrating radar at Kangerlussuaq Airport, western Greenland. Cold Reg. Sci. Technol. 2007, 48, 64–72. [Google Scholar] [CrossRef]
- Yannan, L.; Zhaoran, X. Study on the Application of GPR in the Void Detection of Airport Pavement. J. Henan Sci. Technol. 2015, 13, 38. [Google Scholar]
- Sussman, T. Application of Ground-Penetrating Radar to Railway Track Substructure Maintenance Management. Ph.D. Thesis, University of Massachusetts Amherst, Amherst, MA, USA, 1999. [Google Scholar]
- Basye, C.; Wilk, S.; Gao, Y. Ground Penetrating Radar (GPR) Technology Evaluation and Implementation; Federal Railroad Administration, Office of Research, Development and Technology: Washington, DC, USA, 2020; p. 20590.
- Kathage, A.; Niessen, J.; White, G.; Bell, N. Fast Inspection of Railway Ballast By Means of Impulse GPR Equipped with Horn Antennas. Railway Engineering-2005, The Eighth International Conference. Available online: https://www.ndt.net/article/v10n09/kathage/kathage.htm (accessed on 11 February 2021).
- Manacorda, G.; Morandi, D.; Sarri, A.; Staccone, G. A customized GPR system for railroad tracks verification. In Proceedings of the SPIE—The International Society for Optical Engineering, Santa Barbara, CA, USA, 12 April 2002. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Xie, W.; Jones, D.L.; Roberts, R. Development of a time–frequency approach to quantify railroad ballast fouling condition using ultrawide band ground-penetrating radar data. Int. J. Pavement Eng. 2010, 11, 269–279. [Google Scholar] [CrossRef]
- Khakiev, Z.; Shapovalov, V.L.; Kruglikov, A.; Yavna, V. GPR determination of physical parameters of railway structural layers. J. Appl. Geophys. 2014, 106, 139–145. [Google Scholar] [CrossRef]
- Fontul, S.; Fortunato, E.; De Chiara, F.; Burrinha, R.; Marco Baldeiras, M. Railways Track Characterization Using Ground Penetrating Radar. Advances in Transportation Geotechnics 3. The 3rd International Conference on Transportation Geotechnics (ICTG 2016). Procedia Eng. 2016, 143, 1193–1200. [Google Scholar] [CrossRef] [Green Version]
- Plati, C.; Loizos, A.; Papavasiliou, V. Inspection of railroad ballast using geophysical method. Int. J. Pavement Eng. 2010, 11, 309–317. [Google Scholar] [CrossRef]
- Hyslip, J.P.; Smith, S.S.; Olhoeft, G.R.; Selig, E.T. Assessment of Railway Track Substructure Condition Using Ground Penetrating Radar. In Proceedings of the Annual Conference of AREMA, Chicago, IL, USA, 5–7 October 2003. [Google Scholar]
- Xiao, J.; Liu, L. Permafrost Subgrade Condition Assessment Using Extrapolation by Deterministic Deconvolution on Multifrequency GPR Data Acquired Along the Qinghai-Tibet Railway. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 83–90. [Google Scholar] [CrossRef]
- Saarenketo, T.; Silvast, M.; Noukka, J. Using GPR on Railways to Identify Frost Susceptible Areas. Proceedings of 6th International Conference on Railway Engineering, London, UK, 3 April–1 May 2003; p. 11. [Google Scholar]
- Vorster, D.J.; Gräbe, P.J. The use of ground-penetrating radar to develop a track substructure characterisation model. J. S. Afr. Inst. Civ. Eng. 2013, 55, 69–78. [Google Scholar]
- Leng, Z.; Al-Qadi, I.L. Railroad Ballast Evaluation Using Ground-Penetrating Radar: Laboratory Investigation and Field Validation. Transp. Res. Rec. J. Transp. Res. Board 2010, 2159, 110–117. [Google Scholar] [CrossRef] [Green Version]
- De Chiara, F. Improving of Railway Track Diagnosis Using Ground Penetrating Radar. Ph.D. Thesis, Sapienza University of Rome, Rome, Italy, 2014. [Google Scholar]
- De Bold, R.; O’connor, G.; Morrissey, J.P.; Forde, M. Benchmarking large scale GPR experiments on railway ballast. Constr. Build. Mater. 2015, 92, 31–42. [Google Scholar] [CrossRef] [Green Version]
- Roberts, R.; Schutz, A.; Al-Qadi, I.L.; Tutumluer, E.; Boyle, J. Characterizing Railroad Ballast Using GPR: Recent Experiences in the United States. In Proceedings of the 2007 4th International Workshop on Advanced Ground Penetrating Radar, IWAGPR, Naples, Italy, 27–29 June 2007. [Google Scholar] [CrossRef]
- Fernandes, F.; Pereira, M.; Gomes Correia, A.; Lourenço, P.; Caldeira, L. Assessment of layer thickness and uniformity in railway embankments with ground penetrating radar. In Adv. Transp. Geotech.; Ellis, E., Thom, N., Yu, H.-S., Dawson, A., McDowell, G., Eds.; CRC Press: Boca Raton, FL, USA, 2008; pp. 571–575. [Google Scholar]
- Bianchini Ciampoli, L.; Calvi, A.; D’Amico, F. Railway Ballast Monitoring by GPR: A Test Site Investigation. Remote Sens. 2019, 11, 2381. [Google Scholar] [CrossRef] [Green Version]
- Benedetto, F.; Tosti, F.; Alani, A.M. An Entropy-Based Analysis of GPR Data for the Assessment of Railway Ballast Conditions. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3900–3908. [Google Scholar] [CrossRef]
- Solla, M.; Fontul, S. Non-destructive tests for railway evaluation: Detection of fouling and joint interpretation of GPR data and track geometric parameters. Ground Penetrating Radar 2018, 1, 75–103. [Google Scholar] [CrossRef]
- Tosti, F.; Bianchini Ciampoli, L.; Calvi, A.; Alani, A.M.; Benedetto, A. An investigation into the railway ballast dielectric properties using different GPR antennas and frequency systems. NDT E Int. 2018, 93, 131–140. [Google Scholar] [CrossRef]
- Su, L.J.; Indraratna, B.; Rujikiatkamjorn, C. Non-destructive assessment of rail track condition using ground penetrating radar. In Proceedings of the 13th International Conference of the International Association for Computer Methods and Advances in Geomechanics, Melbourne, Australia, 9–11 May 2011; Khalili, N., Oeser, M., Eds.; Centre for Infrastructure Engineering and Safety: Sydney, Australia, 2011; pp. 478–482. [Google Scholar]
- Ciampoli, L.B.; Artagan, S.S.; Tosti, F.; Gagliardi, V.; Alani, A.M.; Benedetto, A. A comparative investigation of the effects of concrete sleepers on the GPR signal for the assessment of railway ballast. In Proceedings of the 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Colla, C.; Krause, M.; Maierhofer, C.; Hohberger, J.J.; Simmer, H. Combination of NDT techniques for site investigation of non-ballasted railway tracks. NDT E Int. 2002, 35, 95–105. [Google Scholar] [CrossRef]
- Huang, J.; Su, Q.; Liu, T.; Wang, W. Behavior and Control of the Ballastless Track-Subgrade Vibration Induced by High-Speed Trains Moving on the Subgrade Bed with Mud Pumping. Hindawishock Vib. 2019, 2019, 1–14. [Google Scholar] [CrossRef]
- Brutus, O.; Tauber, G. Guide to Asset Management of Earth Retaining Structures; US Department of Transportation, Federal Highway Administration, Office of Asset Management: Washington, DC, USA, 2009; pp. 1–120.
- Huston, D.R.; Pelczarski, N.V.; Esser, B. Inspection of bridge columns and retaining walls with electromagnetic waves. In Proceedings of the Smart Structures and Materials, Smart Systems for Bridges, Structures, and Highways, Newport Beach, CA, USA, 30 July 2001; International Society for Optics and Photonics: Bellingham, WA, USA, 2001; Volume 4330, pp. 66–76. [Google Scholar]
- Hugenschmidt, J.; Kalogeropoulos, A. The inspection of retaining walls using GPR. J. Appl. Geophys. 2009, 67, 335–344. [Google Scholar] [CrossRef]
- Hugenschmidt, J.; Kalogeropoulos, A.; Soldovieri, F.; Prisco, G. Processing strategies for high-resolution GPR concrete inspections. NDT E Int. 2010, 43, 334–342. [Google Scholar] [CrossRef]
- Beben, D.; Anigacz, W.; Ukleja, J. Diagnosis of bedrock course and retaining wall using GPR. NDT E Int. 2013, 59, 77–85. [Google Scholar] [CrossRef]
- Ukleja, J.; Bęben, D.; Anigacz, W. Determination of the railway retaining wall dimensions and its foundation in difficult terrain and utility. Agh J. Min. Geoengin. 2012, 36, 299–308. [Google Scholar]
- Solla, M.; González-Jorge, H.; Álvarez, M.X.; Arias, P. Application of non-destructive geomatic techniques and FDTD modeling to metrical analysis of stone blocks in a masonry wall. Constr. Build. Mater. 2012, 36, 14–19. [Google Scholar] [CrossRef]
- Santos-Assunçao, S.; Dimitriadis, K.; Konstantakis, Y.; Perez-Gracia, V.; Anagnostopoulou, E.; Gonzalez-Drigo, R. Ground-penetrating radar evaluation of the ancient Mycenaean monument Tholos Acharnon tomb. Near Surf. Geophys. 2016, 14, 197–205. [Google Scholar] [CrossRef] [Green Version]
- McCann, D.M.; Forde, M.C. Review of NDT methods in the assessment of concrete and masonry structures. NDT E Int. 2001, 34, 71–84. [Google Scholar] [CrossRef]
- Bhandari, N.M.; Kumar, P. Structural health monitoring and assessment of masonry arch bridges. Proceedings of National Conference on Advances in Bridge Engineering (ABE), Roorkee, India, 24–25 March 2006; pp. 115–132. [Google Scholar]
- Orbán, Z.; Gutermann, M. Assessment of masonry arch railway bridges using nondestructive in-situ testing methods. Eng. Struct. 2009, 31, 2287–2298. [Google Scholar] [CrossRef]
- Rehman, S.K.U.; Ibrahim, Z.; Memon, S.A.; Jameel, M. Nondestructive test methods for concrete bridges: A review. Constr. Build. Mater. 2016, 107, 58–86. [Google Scholar] [CrossRef] [Green Version]
- Dabous, S.A.; Feroz, S. Condition Monitoring of Bridge Infrastructure Using Non-Contact Testing Technologies: A Comprehensive Review. Autom. Constr. 2020, 116, 103224. [Google Scholar] [CrossRef]
- Ural, A.; Oruç, S.; Dogangün, A.; Tulik, O.I. Turkish historical arch bridges and their deteriorations and failures. Eng. Fail. Anal. 2008, 15, 43–53. [Google Scholar] [CrossRef]
- Solla, M.; Lorenzo, H.; Novo, A.; Rial, F.I. Ground-penetrating Radar Assessment of the Medieval Arch Bridge of San Antón, Galicia, Spain. Archaeol. Prospect. 2010, 17, 223–232. [Google Scholar] [CrossRef]
- Solla, M.; Lorenzo, H.; Rial, F.I.; Novo, A. GPR evaluation of the Roman masonry arch bridge of Lugo (Spain). NDT E Int. 2011, 44, 8–12. [Google Scholar] [CrossRef]
- Solla, M.; Riveiro, B.; Lorenzo, H.; Armesto, J. Ancient Stone bridge surveying by ground-penetrating radar and numerical modeling methods. J. Bridge Eng. 2014, 19, 110–119. [Google Scholar] [CrossRef]
- Solla, M.; Lorenzo, H.; Riveiro, B.; Rial, F.I. Non-destructive methodologies in the assessment of the masonry arch bridge of Traba, Spain. Eng. Fail. Anal. 2011, 18, 828–835. [Google Scholar] [CrossRef]
- Alani, A.M.; Tosti, F.; Banks, K.; Biancini-Ciampoli, L.; Benedetto, A. Non-destructive assessment of a historic masonry arch bridge using ground penetrating radar and 3D laser scanner. In Proceedings of the IMEKO International Conference on Metrology for Archaeology and Cultural Heritage, Lecce, Italy, 23–25 October 2017. [Google Scholar]
- Solla, M.; Asorey-Cacheda, R.; Núñez-Nieto, X.; Conde-Carnero, B. Evaluation of historical bridges through recreation of GPR models with the FDTD algorithm. NDT E Int. 2016, 77, 19–27. [Google Scholar] [CrossRef]
- Trela, C.; Wöstmann, J.; Kruschwitz, S. Contribution of radar measurements to the inspection and condition assessment of railway bridges—Case study at a historic masonry arch bridge in Oleśnica/Poland. Wit Trans. Built Environ. 2008, 97, 535–544. [Google Scholar] [CrossRef] [Green Version]
- Fauchard, C.; Antoine, R.; Bretar, F.; Lacogne, J.; Fargier, Y.; Maisonnave, C.; Guilbert, V.; Marjerie, P.; Thérain, P.F.; Dupont, J.P.; et al. Assessment of an ancient bridge combining geophysical and advanced photogrammetric methods: Application to the Pont De Coq, France. J. Appl. Geophys. 2013, 98, 100–112. [Google Scholar] [CrossRef]
- Bergamo, O.; Campione, G.; Donadello, S.; Russo, G. In-situ NDT testing procedure as an integral part of failure analysis of historical masonry arch bridges. Eng. Fail. Anal. 2015, 57, 31–55. [Google Scholar] [CrossRef]
- Solla, M.; Lorenzo, H.; Rial, F.I.; Novo, A. Ground-penetrating radar for the structural evaluation of masonry bridges: Results and interpretational tools. Constr. Build. Mater. 2012, 29, 458–465. [Google Scholar] [CrossRef]
- Kalogeropoulos, A.; Brühwiler, E. High-resolution 3D condition survey of a masonry arch bridge using Ground Penetrating Radar. In Proceedings of the First Middle East Conference on Smart Monitoring, Assessment and Rehabilitation of Civil Structures, Dubai, United Arab Emirates, 8–10 February 2011. [Google Scholar]
- Arias, P.; Armesto, J.; Di-Capua, D.; González–Drigo, R.; Lorenzo, H.; Pérez-Gracia, V. Digital photogrammetry, GPR and computational analysis of structural damages in a mediaeval bridge. Eng. Fail. Anal. 2007, 14, 1444–1457. [Google Scholar] [CrossRef]
- Pérez-Gracia, V.; Di Capua, D.; Caselles, O.; Rial, F.; Lorenzo, H.; González-Drigo, R.; Armesto, J. Characterization of a Romanesque bridge in Galicia (Spain). Int. J. Archit. Herit. 2011, 5, 251–263. [Google Scholar] [CrossRef]
- Sánchez-Aparicio, L.J.; Bautista-De Castro, A.; Conde, B.; Carrasco, P.; Ramos, L.F. Non-destructive means and methods for structural diagnosis of masonry arch bridges. Autom. Constr. 2019, 104, 360–382. [Google Scholar] [CrossRef]
- Lubowiecka, I.; Arias, P.; Riveiro, B.; Solla, M. Multidisciplinary approach to the assessment of historic structures based on the case of a masonry bridge in Galicia (Spain). Comput. Struct. 2011, 89, 1615–1627. [Google Scholar] [CrossRef]
- Stavroulaki, M.E.; Riveiro, B.; Drosopoulos, G.A.; Solla, M.; Koutsianitis, P.; Stavroulakis, G.E. Modelling and strength evaluation of masonry bridges using terrestrial photogrammetry and finite elements. Adv. Eng. Softw. 2016, 101, 136–148. [Google Scholar] [CrossRef]
- Solla, M.; Lorenzo, H.; Novo, A.; Caamaño, J.C. Structural analysis of the Roman Bibei Bridge (Spain) based on GPR data and numerical modelling. Autom. Constr. 2012, 22, 334–339. [Google Scholar] [CrossRef]
- Arêde, A.; Costa, C.; Gomes, A.T.; Menezes, J.E.; Silva, R.; Morais, M.; Gonçalves, R. Experimental characterization of the mechanical behaviour of components and materials of stone masonry railway bridges. Constr. Build. Mater. 2017, 153, 663–681. [Google Scholar] [CrossRef]
- Lubowiecka, I.; Armesto, J.; Arias, P.; Lorenzo, H. Historic bridge modelling using laser scanning, ground penetrating radar and finite element methods in the context of structural dynamics. Eng. Struct. 2009, 31, 2667–2676. [Google Scholar] [CrossRef]
- Costa, C.; Ribeiro, D.; Jorge, P.; Silva, R.; Arêde, A.; Calçada, R. Calibration of the numerical model of a stone masonry railway bridge based on experimentally identified modal parameters. Eng. Struct. 2016, 123, 354–371. [Google Scholar] [CrossRef]
- Russo, S. Integrated assessment of monumental structures through ambient vibrations and ND tests: The case of rialto bridge. J. Cult. Herit. 2016, 19, 402–414. [Google Scholar] [CrossRef]
- Conde, B.; Ramos, L.F.; Oliveira, D.V.; Riveiro, B.; Solla, M. Structural assessment of masonry arch bridges by combination of non-destructive testing techniques and three-dimensional numerical modelling: Application to Vilanova bridge. Eng. Struct. 2017, 148, 621–638. [Google Scholar] [CrossRef]
- Cortés-Pérez, J.P.C.; de Sanjosé Blasco, J.J.; Atkinson, A.D.; del Río Pérez, L.M. Assessment of the structural integrity of the Roman bridge of Alcántara (Spain) using TLS and GPR. Remote Sens. 2018, 10, 387. [Google Scholar] [CrossRef] [Green Version]
- Bautista-De Castro, A.; Sánchez-Aparicio, L.J.; Carrasco-García, P.; Ramos, L.F.; González-Aguilera, D. A multidisciplinary approach to calibrating advanced numerical simulations of masonry arch bridges. Mech. Syst. Signal Process. 2019, 129, 337–365. [Google Scholar] [CrossRef]
- Saarenketo, T.; Maijala, P.; Leppäl¨, A. Recommendations for Guidelines for the Use of GPR in Bridge Deck Surveys; Publications of Mara Nord Project. 18p. 2011. Available online: http://maranord.ramk.fi (accessed on 11 February 2021).
- Hugenschmidt, J. Concrete bridge inspection with a mobile GPR system. Constr. Build. Mater. 2002, 16, 147–154. [Google Scholar] [CrossRef]
- Hugenschmidt, J.; Mastrangelo, R. GPR inspection of concrete bridges. Cem. Concr. Compos. 2006, 28, 384–392. [Google Scholar] [CrossRef]
- Hasan, M.I.; Yazdani, N. Ground penetrating radar utilization in exploring inadequate concrete covers in a new bridge deck. Case Stud. Constr. Mater. 2014, 1, 104–114. [Google Scholar] [CrossRef] [Green Version]
- Beben, D.; Mordak, A.; Anigacz, W. Identification of viaduct beam paremeters using the Ground Penetrating Radar (GPR) technique. NDT E Int. 2012, 49, 18–26. [Google Scholar] [CrossRef]
- Simi, A.; Manacorda, G.; Benedetto, A. Bridge deck survey with high resolution Ground Penetrating Radar. In Proceedings of the 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012. [Google Scholar] [CrossRef]
- Alani, A.M.; Aboutalebi, M.; Kilic, G. Applications of ground penetrating radar (GPR) in bridge deck monitoring and assessment. J. Appl. Geophys. 2013, 97, 45–54. [Google Scholar] [CrossRef]
- Varela-Ortiz, W.; Lugo-Cintrón, C.Y.; Velázquez, G.I.; Stanton, T.R. Load testing and GPR assessment for concrete bridges on military installations. Constr. Build. Mater. 2013, 38, 1255–1269. [Google Scholar] [CrossRef] [Green Version]
- Dinh, K.; Gucunski, N.; Zayed, T. Automated visualization of concrete bridge deck condition from GPR data. NDT E Int. 2019, 102, 120–128. [Google Scholar] [CrossRef]
- Janků, M.; Cikrle, P.; Grošek, J.; Anton, O.; Stryk, J. Comparison of infrared thermography, ground-penetrating radar and ultrasonic pulse echo for detecting delaminations in concrete bridges. Constr. Build. Mater. 2019, 225, 1098–1111. [Google Scholar] [CrossRef]
- Rathod, H.; Debeck, S.; Gupta, R.; Chow, B. Applicability of GPR and a rebar detector to obtain rebar information of existing concrete structures. Case Stud. Constr. Mater. 2019, 11, e00240. [Google Scholar] [CrossRef]
- Sławski, Ł.; Kosno, Ł.; Świt, G. Evaluation of Precast Pre-post-tensioned Concrete Bridge Beams with the Use of GPR Method. Procedia Eng. 2016, 156, 443–450. [Google Scholar] [CrossRef] [Green Version]
- Barnes, C.L.; Trottier, J.F.; Forgeron, D. Improved concrete bridge deck evaluation using GPR by accounting for signal depth-amplitude effects. NDT E Int. 2008, 41, 427–433. [Google Scholar] [CrossRef]
- Benedetto, A. A three dimensional approach for tracking cracks in bridges using GPR. J. Appl. Geophys. 2013, 97, 37–44. [Google Scholar] [CrossRef]
- Varnavina, A.V.; Khamzin, A.K.; Sneed, L.H.; Torgashov, E.V.; Anderson, N.L.; Maerz, N.H.; Boyko, K.J. Concrete bridge deck assessment: Relationship between GPR data and concrete removal depth measurements collected after hydrodemolition. Constr. Build. Mater. 2015, 99, 26–38. [Google Scholar] [CrossRef]
- Varnavina, A.V.; Khamzin, A.K.; Torgashov, E.V.; Sneed, L.H.; Goodwin, B.T.; Anderson, N.L. Data acquisition and processing parameters for concrete bridge deck condition assessment using ground-coupled ground penetrating radar: Some considerations. J. Appl. Geophys. 2015, 114, 123–133. [Google Scholar] [CrossRef]
- Abouhamad, M.; Dawood, T.; Jabri, A.; Alsharqawi, M.; Zayed, T. Corrosiveness mapping of bridge decks using image-based analysis of GPR data. Autom. Constr. 2017, 80, 104–117. [Google Scholar] [CrossRef]
- Dabous, S.A.; Yaghi, S.; Alkass, S.; Moselhi, O. Concrete bridge deck condition assessment using IR Thermography and Ground Penetrating Radar technologies. Autom. Constr. 2017, 81, 340–354. [Google Scholar] [CrossRef]
- Diamanti, N.; Annan, P.; Redman, J.D. Concrete bridge deck deterioration assessment using ground penetrating radar (GPR). J. Environ. Eng. Geophys. 2017, 22, 121–132. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Kim, J.; Duong, T. Method for attenuation assessment of GPR data from concrete bridge decks. NDT E Int. 2017, 92, 50–58. [Google Scholar] [CrossRef]
- Varnavina, A.V.; Sneed, L.H.; Khamzin, A.K.; Torgashov, E.V.; Anderson, N.L. An attempt to describe a relationship between concrete deterioration quantities and bridge deck condition assessment techniques. J. Appl. Geophys. 2017, 142, 38–48. [Google Scholar] [CrossRef]
- Ghodoosi, F.; Bagchi, A.; Zayed, T.; Hosseini, M.R. Method for developing and updating deterioration models for concrete bridge decks using GPR data. Autom. Constr. 2018, 91, 133–141. [Google Scholar] [CrossRef]
- Sun, H.; Pashoutani, S.; Zhu, J. Nondestructive Evaluation of Concrete Bridge Decks with Automated Acoustic Scanning System and Ground Penetrating Radar. Sens. (Basel) 2018, 18, 1955. [Google Scholar] [CrossRef] [Green Version]
- Rhee, J.-Y.; Choi, J.-J.; Kee, S.-H. Evaluation of the Depth of Deteriorations in Concrete Bridge Decks with Asphalt Overlays Using Air-Coupled GPR: A Case Study from a Pilot Bridge on Korean Expressway. Int. J. Concr. Struct. Mater. 2019, 13, 23. [Google Scholar] [CrossRef] [Green Version]
- Agred, K.; Klysz, G.; Balayssac, J.P. Location of reinforcement and moisture assessment in reinforced concrete with a double receiver GPR antenna. Constr. Build. Mater. 2018, 188, 1119–1127. [Google Scholar] [CrossRef]
- Wang, Z.W.; Zhou, M.; Slabaugh, G.G.; Zhai, J.; Fang, T. Automatic Detection of Bridge Deck Condition From Ground Penetrating Radar Images. IEEE Trans. Autom. Sci. Eng. 2011, 8, 633–640. [Google Scholar] [CrossRef]
- Kaur, P.; Dana, K.J.; Romero, F.A.; Gucunski, N. Automated GPR rebar analysis for robotic bridge deck evaluation. IEEE Trans. Cybern. 2016, 46, 2265–2276. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Duong, T.H. An algorithm for automatic localization and detection of rebars from GPR data of concrete bridge decks. Autom. Constr. 2018, 89, 292–298. [Google Scholar] [CrossRef]
- Dinh, K.; Gucunski, N.; Duong, T.H. Migration-based automated rebar picking for condition assessment of concrete bridge decks with ground penetrating radar. NDT E Int. 2018, 98, 45–54. [Google Scholar] [CrossRef]
- Asadi, P.; Gindy, M.; Álvarez, M.; Asadi, A. A computer vision based rebar detection chain for automatic processing of concrete bridge deck GPR data. Autom. Constr. 2020, 112, 103106. [Google Scholar] [CrossRef]
- Ma, X.; Liu, H.; Wang, M.L.; Birken, R. Automatic detection of steel rebar in bridge decks from ground penetrating radar data. J. Appl. Geophys. 2018, 158, 93–102. [Google Scholar] [CrossRef]
- Alani, A.M.; Aboutalebi, M.; Kilic, G. Integrated health assessment strategy using NDT for reinforced concrete bridges. NDT E Int. 2014, 61, 80–94. [Google Scholar] [CrossRef]
- ITA/AITES. Settlements induced by tunneling in Soft Ground. Tunn. Undergr. Space Technol. 2007, 22, 119–149. [Google Scholar] [CrossRef]
- ASTM. ASTM D6429-99(2011)e1. In Standard Guide for Selecting Surface Geophysical Methods (Withdrawn 2020); ASTM International: West Conshohocken, PA, USA, 2011. [Google Scholar] [CrossRef]
- Abraham, O.; Dérobert, X. Non-destructive testing of fired tunnel walls: The Mont-Blanc Tunnel case study. NDT E Int. 2003, 36, 411–418. Available online: www.astm.org (accessed on 11 February 2021). [CrossRef]
- Xie, X.; Liu, Y.; Huang, H.; Du, J.; Zhang, F.; Liu, L. Evaluation of grout behind the lining of shield tunnels using ground-penetrating radar in the Shanghai Metro Line, China. J. Geophys. Eng. 2007, 4, 253–261. [Google Scholar] [CrossRef]
- Parkinson, G.; Ékes, C. Ground Penetrating Radar Evaluation of Concrete Tunnel Linings. In Proceedings of the 12th International Conference on Ground Penetrating Radar (GPR), Birmingham, UK, 16–19 June 2008. [Google Scholar]
- Zhang, F.; Xie, X.; Huang, H. Application of ground penetrating radar in grouting evaluation for shield tunnel construction. Tunn. Undergr. Space Technol. 2010, 25, 99–107. [Google Scholar] [CrossRef]
- Li, C.; Li, M.-J.; Zhao, Y.-G.; Liu, H.; Wan, Z.; Xu, J.-C.; Xu, X.-P.; Chen, Y.; Wang, B. Layer recognition and thickness evaluation of tunnel lining based on ground penetrating radar measurements. J. Appl. Geophys. 2011, 73, 45–48. [Google Scholar] [CrossRef]
- Liu, X.; Sun, Q.; Liu, P. The application of Ground Penetrating Radar in detection of the water delivery tunnel lining. In Proceedings of the International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 24–26 June 2011. [Google Scholar] [CrossRef]
- Yu, H.; Ouyang, Y.; Chen, H. Application of Ground Penetrating Radar to Inspect the Metro Tunnel. In Proceedings of the 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012. [Google Scholar] [CrossRef]
- Xie, X.; Zeng, C. Non-destructive evaluation of shield tunnel condition using GPR and 3D laser scanning. In Proceedings of the 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012. [Google Scholar] [CrossRef]
- Xiong, X.; Zhou, Q.; Zhou, J.; Ma, Y.; Wang, K. Application of GPR Technique and Research on high-speed railway tunnel. In Proceedings of the 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012. [Google Scholar] [CrossRef]
- Lei, X.; Hui-lin, Z.; Zhen, S.; Si-hao, T.; Guo-qing, L.; Jian, Z. GPR evaluation of the Damaoshan highway tunnel: A case study. NDT E Int. 2013, 59, 68–76. [Google Scholar] [CrossRef]
- Yu, Q.-M.; Zhou, H.-L.; Wang, Y.-H.; Duan, R.-X. Quality monitoring of metro grouting behind segment using ground penetrating radar. Constr. Build. Mater. 2016, 110, 189–200. [Google Scholar] [CrossRef]
- Zan, Y.W.; Su, G.F.; Li, Z.L. A Train-mounted GPR System for Fast and Efficient Monitoring of Tunnel Health Conditions. In Proceedings of the 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016. [Google Scholar] [CrossRef]
- Xiongyao, X.; Li, Z.; Biao, Z. Real-time detection technology of synchronous grouting for shield tunnel and analysis of grouting effect. In Proceedings of the 17th International Conference on Ground Penetrating Radar (GPR), Rapperswill, Switzerland, 18–21 June 2018. [Google Scholar] [CrossRef]
- Cao, Y.; Liu, Q.; Tao, L. Application of Ground Penetrating Radar for Detecting Grouting Quality in Highway Tunnel. In Proceedings of the 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 24–26 May 2019. [Google Scholar] [CrossRef]
- Tang, S.; Bai, X. Study on Application of GPR to Quality Detection of Tunnel Lining. Appl. Mech. Mater. 2013, 333–335, 1611–1616. [Google Scholar] [CrossRef]
- Kilic, G.; Eren, L. Neural network based inspection of voids and karst conduits in hydro–electric power station tunnels using GPR. J. Appl. Geophys. 2018, 151, 194–204. [Google Scholar] [CrossRef]
- Cardarelli, E.; Marrone, C.; Orlando, L. Evaluation of tunnel stability using integrated geophysical methods. J. Appl. Geophys. 2003, 52, 93–102. [Google Scholar] [CrossRef]
- Arosio, D.; Munda, S.; Zanzi, L.; Longoni, L.; Papini, M. GPR investigations to assess the state of damage of a concrete water tunnel. J. Environ. Eng. Geophys. 2012, 17, 159–169. [Google Scholar] [CrossRef]
- Prego, F.J.; Solla, M.; Núñez-Nieto, X.; Arias, P. Assessing the Applicability of Ground-Penetrating Radar to Quality Control in Tunneling Construction. J. Constr. Eng. Manag. 2016, 142, 06015006. [Google Scholar] [CrossRef]
- Ismail, M.A.; Abas, A.A.; Arifin, M.H.; Ismail, M.N.; Othman, N.A.; Setu, A.; Ahmad, M.R.; Shah, M.K.; Amin, S.; Sarah, T. Integrity inspection of main access tunnel using ground penetrating radar. In Proceedings of the IOP Conference Series: Materials Science and Engineering 271, Global Congress on Construction, Material and Structural Engineering (GCoMSE), Johor Bahru, Malaysia, 28–29 August 2017. [Google Scholar] [CrossRef] [Green Version]
- Zan, Y.; Li, Z.; Su, G.; Zhang, X. An innovative vehicle-mounted GPR technique for fast and efficient monitoring of tunnel lining structural conditions. Case Stud. Nondestruct. Test. Eval. 2016, 6, 63–69. [Google Scholar] [CrossRef] [Green Version]
- Alani, A.M.; Banks, K. Applications of Ground Penetrating Radar in the Medway Tunnel-Inspection of Structural Joints. In Proceedings of the 15th International Conference on Ground Penetrating Radar (GPR), Brussels, Belgium, 30 June–4 July 2014. [Google Scholar] [CrossRef]
- Alani, A.M.; Tosti, F. GPR applications in structural detailing of a major tunnel using different frequency antenna systems. Constr. Build. Mater. 2018, 158, 1111–1122. [Google Scholar] [CrossRef]
- Stryk, J.; Matula, R.; Pospíšil, K.; Dérobert, X.; Simonin, J.M.; Alani, A.M. Comparative measurements of ground penetrating radars used for road and bridge diagnostics in the Czech Republic and France. Constr. Build. Mater. 2017, 154, 1199–1206. [Google Scholar] [CrossRef]
- ME91/16: Methodologies for the Use of Ground-Penetrating Radar in Pavement Condition Surveys; Belgian Road 445 Research Centre: Brussels, Belgium, 2016.
- Solla, M.; González-Jorge, H.; Lorenzo, H.; Arias, P. Uncertainty evaluation of the 1 GHz GPR antenna for the estimation of concrete asphalt thickness. Measurement 2013, 46, 3032–3040. [Google Scholar] [CrossRef]
- Li, X.T.; Wang, D.Y.; Zhang, X.N. A high-accuracy calibration method for thickness measurements of asphalt pavement using ground penetrating radar. SATC 2006, 2006, 305–312. [Google Scholar]
- Fauchard, C.; Dérobert, X.; Cariou, J.; Côte, P. GPR performances for thickness calibration on road test sites. NDT E Int. 2003, 36, 67–75. [Google Scholar] [CrossRef]
- Hu, J.; Vennapusa, P.K.; White, D.J.; Beresnev, I. Pavement thickness and stabilised foundation layer assessment using ground-coupled GPR. Nondestruct. Test. Eval. 2016, 31, 267–287. [Google Scholar] [CrossRef]
- Zhao, S.; Al-Qadi, I.L. Development of an analytic approach utilizing the extended common midpoint method to estimate asphalt pavement thickness with 3-D ground-penetrating radar. NDT E Int. 2016, 78, 29–36. [Google Scholar] [CrossRef]
- Lahouar, S.; Al-Qadi, I.L.; Loulizi, A.; Clark, T.M.; Lee, D.T. Approach to determining in situ dielectric constant of pavements: Development and implementation at interstate 81 in Virginia. Transp. Res. Rec. 2002, 1806, 81–87. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Lahouar, S. Use of GPR for thickness measurement and quality control of flexible pavements. J. Assoc. Asph. Paving Technol. 2004, 73, 501–528. [Google Scholar]
- Al-Qadi, I.L.; Lahouar, S.; Loulizi, A. Ground-Penetrating Radar Calibration at the Virginia Smart Road and Signal Analysis to Improve Prediction of Flexible Pavement Layer Thicknesses; Virginia Center for Transportation Innovation and Research: Charlottesville, VA, USA, 2005. [Google Scholar]
- Diamanti, N.; Annan, A.P. Air-launched and ground-coupled GPR data. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; IEEE: New York, NY, USA, 2017; pp. 1694–1698. [Google Scholar] [CrossRef]
- Dong, Z.; Ye, S.; Gao, Y.; Fang, G.; Zhang, X.; Xue, Z.; Zhang, T. Rapid detection methods for asphalt pavement thicknesses and defects by a vehicle-mounted ground penetrating radar (GPR) system. Sensors 2016, 16, 2067. [Google Scholar] [CrossRef] [Green Version]
- Hoegh, K.; Khazanovich, L.; Dai, S.; Yu, T. Evaluating asphalt concrete air void variation via GPR antenna array data. Case Stud. Nondestruct. Test. Eval. 2015, 3, 27–33. [Google Scholar] [CrossRef] [Green Version]
- Dérobert, X.; Fauchard, C.; Côte, P.; Le Brusq, E.; Guillanton, E.; Dauvignac, J.Y.; Pichot, C. Step-frequency radar applied on thin road layers. J. Appl. Geophys. 2001, 47, 317–325. [Google Scholar] [CrossRef]
- Marecos, V.; Solla, M.; Fontul, S.; Antunes, V. Assessing the pavement subgrade by combining different non-destructive methods. Constr. Build. Mater. 2017, 135, 76–85. [Google Scholar] [CrossRef] [Green Version]
- Diallo, M.C.; Cheng, L.Z.; Rosa, E.; Gunther, C.; Chouteau, M. Integrated GPR and ERT data interpretation for bedrock identification at Cléricy, Québec, Canada. Eng. Geol. 2019, 248, 230–241. [Google Scholar] [CrossRef]
- Colagrande, S.; Ranalli, D.; Tallini, M. Ground penetrating radar assessment of flexible road pavement degradation. Int. J. Geophys. 2011, 2011, 989135. [Google Scholar] [CrossRef] [Green Version]
- Plati, C.; Loizos, A.; Gkyrtis, K. Integration of non-destructive testing methods to assess asphalt pavement thickness. NDT E Int. 2020, 115, 102292. [Google Scholar] [CrossRef]
- Scullion, T.; Saarenketo, T. Integrating ground penetrating radar and falling weight deflectometer technologies in pavement evaluation. In Nondestructive Testing of Pavements and Backcalculation of Moduli; ASTM International: West Conshohocken, PA, USA, 2000; Volume 3. [Google Scholar] [CrossRef]
- Marecos, V.; Fontul, S.; de Lurdes Antunes, M.; Solla, M. Evaluation of a highway pavement using non-destructive tests: Falling weight deflectometer and ground penetrating radar. Constr. Build. Mater. 2017, 154, 1164–1172. [Google Scholar] [CrossRef]
- Evans, R.D.; Frost, M.; Stonecliffe-Jones, M.; Dixon, N. A review of pavement assessment using ground penetrating radar (GPR). In Proceedings of the 12th International Conference on Ground Penetrating Radar, Birmingham, UK, 16–19 June 2008. [Google Scholar]
- Marecos, V.; Fontul, S.; Solla, M.; de Lurdes Antunes, M. Evaluation of the feasibility of Common Mid-Point approach for air-coupled GPR applied to road pavement assessment. Measurement 2018, 128, 295–305. [Google Scholar] [CrossRef]
- Maser, K.R. Measurement of as-built conditions using ground penetrating radar. In Proceedings of the Structural Materials Technology: An NDT Conference, San Diego, CA, USA, 20–23 February 1996; pp. 61–67. [Google Scholar]
- Al-Qadi, I.L.; Lahouar, S.; Jiang, K.; MeGhee, K.K.; Mokarem, D. Validation of ground penetration radar accuracy for estimating pavement layer thicknesses. In Proceedings of the Transportation Research Board 84th Annual Meeting, Washington, DC, USA, 9–13 January 2005. [Google Scholar]
- Schmidtgen, B.D.; Milne, T.I.; Saarenketo, T. Road management data assimilation and quality control of asphalt and bituminous pavements using GPR. In Proceedings of the 10th Conference on Asphalt Pavements for Southern Africa [CAPSA11], KwaZulu-Natal, South Africa, 11–14 September 2011. [Google Scholar]
- Benedetto, A.; Benedetto, F.; Tosti, F. GPR applications for geotechnical stability of transportation infrastructures. Nondestruct. Test. Eval. 2012, 27, 253–262. [Google Scholar] [CrossRef]
- Lagüela, S.; Solla, M.; Puente, I.; Prego, F.J. Joint use of GPR, IRT and TLS techniques for the integral damage detection in paving. Constr. Build. Mater. 2018, 174, 749–760. [Google Scholar] [CrossRef]
- Le Bastard, C.; Pan, J.; Wang, Y.; Sun, M.; Todkar, S.S.; Baltazart, V.; Pinel, N.; Ihamouten, A.; Derobert, X.; Bourlier, C. A Linear Prediction and Support Vector Regression-Based Debonding Detection Method Using Step-Frequency Ground Penetrating Radar. IEEE Geosci. Remote Sens. Lett. 2018, 16, 367–371. [Google Scholar] [CrossRef]
- Todkar, S.S.; Le Bastard, C.; Baltazart, V.; Ihamouten, A.; Dérobert, X. Performance assessment of SVM-based classification techniques for the detection of artificial debondings within pavement structures from stepped-frequency A-scan radar data. NDT E Int. 2019, 107, 102128. [Google Scholar] [CrossRef]
- Ercoli, M.; Di Matteo, L.; Pauselli, C.; Mancinelli, P.; Frapiccini, S.; Talegalli, L.; Cannata, A. Integrated GPR and laboratory water content measures of sandy soils: From laboratory to field scale. Constr. Build. Mater. 2018, 159, 734–744. [Google Scholar] [CrossRef]
- Venmans, A.A.; van de Ven, R.; Kollen, J. Rapid and non-intrusive measurements of moisture in road constructions using passive microwave radiometry and GPR–full scale test. Procedia Eng. 2016, 143, 1244–1251. [Google Scholar] [CrossRef] [Green Version]
- Bianchini Ciampoli, L.; Tosti, F.; Economou, N.; Benedetto, F. Signal processing of GPR data for road surveys. Geosciences 2019, 9, 96. [Google Scholar] [CrossRef] [Green Version]
- Puente, I.; Solla, M.; González-Jorge, H.; Arias, P. Validation of mobile LiDAR surveying for measuring pavement layer thicknesses and volumes. NDT E Int. 2013, 60, 70–76. [Google Scholar] [CrossRef]
- Khamzin, A.K.; Varnavina, A.V.; Torgashov, E.V.; Anderson, N.L.; Sneed, L.H. Utilization of air-launched ground penetrating radar (GPR) for pavement condition assessment. Constr. Build. Mater. 2017, 141, 130–139. [Google Scholar] [CrossRef]
- Shangguan, P.; Al-Qadi, I.L. Calibration of FDTD simulation of GPR signal for asphalt pavement compaction monitoring. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1538–1548. [Google Scholar] [CrossRef]
- Bala, D.C.; Garg, R.D.; Jain, S.S. Rebar detection using GPR: An emerging non-destructive QC approach. International Journal of Engineering Research and Applications (IJERA) 2011, 1, 2111–2117. [Google Scholar]
- Zhou, F.; Chen, Z.; Liu, H.; Cui, J.; Spencer, B.F.; Fang, G. Simultaneous estimation of rebar diameter and cover thickness by a GPR-EMI dual sensor. Sensors 2018, 18, 2969. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, N.; Kim, K.; An, Y.K.; Lee, H.J.; Lee, J.J. Deep learning-based underground object detection for urban road pavement. Int. J. Pavement Eng. 2018, 1–13. [Google Scholar] [CrossRef]
- Solla, M.; Lagüela, S.; Fernández, N.; Garrido, I. Assessing Rebar Corrosion through the Combination of Nondestructive GPR and IRT Methodologies. Remote Sens. 2019, 11, 1705. [Google Scholar] [CrossRef] [Green Version]
- Sossa, V.; Pérez-Gracia, V.; González-Drigo, R.; A Rasol, M. Lab Non Destructive Test to Analyze the Effect of Corrosion on Ground Penetrating Radar Scans. Remote Sens. 2019, 11, 2814. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.; Lai, W.W.L.; Wilsch, G.; Helmerich, R.; Helmerich, R.; Günther, T.; Wiggenhauser, H. Periodic mapping of reinforcement corrosion in intrusive chloride contaminated concrete with GPR. Constr. Build. Mater. 2014, 66, 671–684. [Google Scholar] [CrossRef]
- Baltrušaitis, A.; Vaitkus, A.; Smirnovs, J. Asphalt Layer Density and Air Voids Content: GPR and Laboratory Testing Data Reliance. Balt. J. Road Bridge Eng. 2020, 15, 93–110. [Google Scholar] [CrossRef]
- Zhong, Y.; Wang, Y.; Zhang, B.; Li, X.; Li, S.; Zhong, Y.; Hao, M.; Gao, Y. Prediction Model of Asphalt Content of Asphalt Mixture Based on Dielectric Properties. Adv. Civ. Eng. 2020, 2020, 1–10. [Google Scholar] [CrossRef]
- Gao, J.; Yuan, D.; Tong, Z.; Yang, J.; Yu, D. Autonomous pavement distress detection using ground penetrating radar and region-based deep learning. Measurement 2020, 164, 108077. [Google Scholar] [CrossRef]
- Tong, Z.; Gao, J.; Yuan, D. Advances of deep learning applications in ground-penetrating radar: A survey. Constr. Build. Mater. 2020, 258, 120371. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Warren, C. A machine learning-based fast-forward solver for ground penetrating radar with application to full-waveform inversion. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4417–4426. [Google Scholar] [CrossRef] [Green Version]
- Tong, Z.; Yuan, D.; Gao, J.; Wei, Y.; Dou, H. Pavement-distress detection using ground-penetrating radar and network in networks. Constr. Build. Mater. 2020, 233, 117352. [Google Scholar] [CrossRef]
- Ozkaya, U.; Seyfi, L. Deep dictionary learning application in GPR B-scan images. Signalimage Video Process. 2018, 12, 1567–1575. [Google Scholar] [CrossRef]
- Tong, Z.; Gao, J.; Zhang, H. Recognition, location, measurement, and 3D reconstruction of concealed cracks using convolutional neural networks. Constr. Build. Mater. 2017, 146, 775–787. [Google Scholar] [CrossRef]
- Kim, N.; Kim, S.; An, Y.K.; Lee, J.J. A novel 3D GPR image arrangement for deep learning-based underground object classification. Int. J. Pavement Eng. 2019, 1–12. [Google Scholar] [CrossRef]
- Muller, W. A comparison of TSD, FWD and GPR field measurements. In Proceedings of the International Symposium Non-Destructive Testing in Civil Engineering (NDT-CE), Berlin, Germany, 15–17 September 2015. [Google Scholar]
- Maser, K.; Schmalzer, P.; Gerber, A.; Poorbaugh, J. Implementation of the Traffic Speed Deflectometer (TSD) for Network Level Pavement Management; Infrasense. Pavement Evaluation: Woburn, MA, USA, 2019. [Google Scholar]
- Maser, K.; Schmalzer, P.; Shaw, W.; Carmichael, A. Integration of Traffic Speed Deflectometer and Ground-Penetrating Radar for Network-Level Roadway Structure Evaluation. Transp. Res. Rec. 2017, 2639, 55–63. [Google Scholar] [CrossRef]
- Katicha, S.; Shrestha, S.; Flintsch, G.; Diefenderfer, B. Network Level Pavement Structural Testing with the Traffic Speed Deflectometer; Final Report VTRC 21–R4; Virginia Transportation Research Council: Charlottesville, VA, USA, 2020. [Google Scholar]
- Lenngren, C.; Bergström, J.; Ersson, B. Using Ground Penetrating Radar for Assessing Highway Pavement Thickness. In Proceedings of the SPIE—The International Society for Optical Engineering, San Diego, CA, USA, 6 July 2020. [Google Scholar] [CrossRef]
- Yuan, C.; Cai, H. Spatial reasoning mechanism to enable automated adaptive trajectory planning in ground penetrating radar survey. Autom. Constr. 2020, 114, 103157. [Google Scholar] [CrossRef]
- Miccinesi, L.; Pieraccini, M. A GPR Able to Detect Its Own Position Using Fixed Corner Reflectors on Surface. IEEE Trans. Geosci. Remote Sens. 2020, 1–8. [Google Scholar] [CrossRef]
- Šarlah, N.; Podobnikar, T.; Mongus, D.; Ambrožič, T.; Mušič, B. Kinematic GPR-TPS Model for Infrastructure Asset Identification with High 3D Georeference Accuracy Developed in a Real Urban Test Field. Remote Sens. 2019, 11, 1457. [Google Scholar] [CrossRef] [Green Version]
- Gabryś, M.; Ortyl, Ł. Georeferencing of Multi-Channel GPR—Accuracy and Efficiency of Mapping of Underground Utility Networks. Remote Sens. 2020, 12, 2945. [Google Scholar] [CrossRef]
- Wu, Y.; Shen, F.; Xu, D. Ground-penetrating radar-based underground environmental perception radar for robotic system. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420921642. [Google Scholar] [CrossRef]
- Eskandari Torbaghan, M.; Kaddouh, B.; Abdellatif, M.; Metje, N.; Liu, J.; Jackson, R.; Rogeres, C.D.; Chapman, D.N.; Fuentes, R.; Miodownik, M.; et al. Robotic and autonomous systems for road asset management: A position paper. Proc. Inst. Civ. Eng.-Smart Infrastruct. Constr. 2020, 172, 83–93. [Google Scholar] [CrossRef]
- Rodriguez-Vaqueiro, Y.; Vázquez-Cabo, J.; Gonzalez-Valdes, B.; Pino, A.; Álvarez, Y.; Garcia-Fernandez, M.; Las-Heras, F.; Arboleya, A. Array of Antennas for a GPR system onboard a UAV. In Proceedings of the 2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting, Atlanta, GA, USA, 7–12 July 2019; IEEE: New York, NY, USA, 2019; pp. 821–822. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, X.; Sun, M.; Zhao, Q. Object-based and supervised detection of potholes and cracks from the pavement images acquired by UAV. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 209–217. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Fernandez, M.; Alvarez-Lopez, Y.; Las Heras, F.; Gonzalez-Valdes, B.; Rodriguez-Vaqueiro, Y.; Pino, A.; Arboleya-Arboleya, A. GPR system onboard a uav for non-invasive detection of buried objects. In Proceedings of the 2018 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Boston, MA, USA, 8–13 July 2018; IEEE: New York, NY, USA, 2018; pp. 1967–1968. [Google Scholar]
- EN 13848-5: 2017. In Railway Applications-Track-Track Geometry Quality—Part 5: Geometric Quality Levels—Plain Line, Switches and Crossings; BSI: London, UK, 2017.
- Esveld, C. Modern Railway Track; MRT-Productions: Zaltbommel, The Netherlands, 2001. [Google Scholar]
- Fortunato, E. Renovação de Plataformas Ferroviárias. Estudos Relativos à Capacidade de Carga. Ph.D. Thesis, University of Porto, Porto, Portugal, 2005. (In Portuguese). [Google Scholar]
- Saarenketo, T. Electrical Properties of Road Materials and Subgrade Soils and the Use of Ground Penetrating Radar in Traffic Infrastructure Surveys. Ph.D. Thesis, Faculty of Science, University of Oulu, Oulu, Finland, 2006. [Google Scholar]
- Loizos, A.; Silvast, M.; Dimitrellou, S. Railway trackbed assessment using the GPR technique. Adv. Charact. Pavement Soil Eng. Mater. 2007, 1, 1817–1826. [Google Scholar]
- De Chiara, F.; Fontul, S.; Fortunato, E. GPR Laboratory Tests for Railways Materials Dielectric Properties Assessment. Remote Sens. 2014, 6, 9712–9728. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Lu, Q.; Li, H.; Wang, Y. Estimation of Moisture Content in Railway Subgrade by Ground Penetrating Radar. Remote Sens. 2020, 12, 2912. [Google Scholar] [CrossRef]
- Shao, W.; Bouzerdoum, A.; Phung, S.L.; Su, L.; Indraratna, B. Automatic Classification of Ground-Penetrating-Radar Signals for Railway-Ballast Assessment. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3961–3972. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Xie, W.; Roberts, R. Scattering Analysis of Railroad Ballast Using Ground Penetrating Radar. J. Nondestruct. Test. Eval. 2008, 41, 441–447. [Google Scholar] [CrossRef]
- Xie, W.; Al-Qadi, I.L.; Jones, D.L.; Roberts, R. Development of a Time-Frequency Approach to Quantify Railroad Ballast Fouling Condition Using UWB GPR Data. In Proceedings of the 87th TRB Annual Meetings, Paper No. 08-1846, Washington, DC, USA, 13–17 January 2008. [Google Scholar]
- Fontul, S.; Paixão, A.; Solla, M.; Pajewski, L. Railway Track Condition Assessment at Network Level by Frequency Domain Analysis of GPR Data. Remote Sens. 2018, 10, 559. [Google Scholar] [CrossRef] [Green Version]
- Al-Qadi, I.; Xie, W.; Roberts, R. Optimization of antenna configuration in multiple-frequency ground penetrating radar system for railroad substructure assessment. NDT E Int. 2010, 43, 20–28. [Google Scholar] [CrossRef]
- Anbazhagan, P.; Su, L.; Indraratna, B.; Rujikiatkamjorn, C. Model track studies on fouled ballast using ground penetrating radar and multichannel analysis of surface wave. J. Appl. Geophys. 2011, 74, 175–184. [Google Scholar] [CrossRef]
- Fortunato, E.; Fontul, S.; Paixão, A.; Cruz, N.; Cruz, J.; Asseiceiro, F. Reabilitação de uma Linha Férrea de Mercadorias—Aspetos Geotécnicos da via (Rehabilitation of a Freight Railway Line—Geotechnical Aspects of the Track). Jornal Geotecnia Nº 131, July 2014; Sociedade Portuguesa de Geotecnia; pp. 95–112. Available online: https://spgeotecnia.pt/uploads/jgeot201413106.pdf (accessed on 11 February 2021). (In Portuguese).
- Roadscanners. GPR Survey on Railway Sections between Montevideo—Paso de los Toros in Uruguay; Project Report; Roadscanners: Rovaniemi, Finland, 2017; (consulted on October 2020). [Google Scholar]
- Riveiro, B.; Solla, M. (Eds.) Non-Destructive Techniques for the Evaluation of Structures and Infrastructure; CRC Press: London, UK, 2016; ISBN 9781138028104. [Google Scholar]
- Zarembski, A.; Yurlov, D.; Palese, J.; Attoh-Okine, N. Relationship between Track Geometry Defects and Measured Track Subsurface Condition; Federal Railroad Administration Report DOT/FRA/ORD-20/07; Federal Railroad Administration: Washington, DC, USA, 2020.
- Smekal, A.; Berggren, E.G.; Silvast, M. Monitoring and substructure condition assessment of existing railway lines for upgrading to higher axle loads and speeds. In Proceedings of the 7th World Congress on Railway Research, Montreal, QC, Canada, 5–7 June 2006. [Google Scholar]
- Brough, M.; Stirling, A.; Ghataora, G.; Madelin, K. Evaluation of railway trackbed and formation: A case study. NDT E Int. 2003, 36, 145–156. [Google Scholar] [CrossRef]
- Lamas-Lopez, F.; Cui, Y.J.; Calon, N.; Costa d’Aguiar, S. Geotechnical auscultation of a French conventional railway track-bed for maintenance purposes. Soils Found 2016, 56, 225–240. [Google Scholar] [CrossRef]
- Zarembski, A.M.; Grissom, G.T.; Euston, T.L. On the Use of Ballast Inspection Technology for the Management of Track Substructure. Transp. Infrastruct. Geotech. 2014, 1, 83–109. [Google Scholar] [CrossRef] [Green Version]
- Hu, F.; Leijen, F.J.v.; Chang, L.; Wu, J.; Hanssen, R.F. Monitoring Deformation along Railway Systems Combining Multi-Temporal InSAR and LiDAR Data. Remote Sens. 2019, 11, 2298. [Google Scholar] [CrossRef] [Green Version]
- Jung, J.; Kim, D.-J.; Palanisamy Vadivel, S.K.; Yun, S.-H. Long-term deflection monitoring for bridges using X and C band time-series SAR interferometry. Remote Sens. 2019, 11, 1258. [Google Scholar] [CrossRef] [Green Version]
- Bianchini Ciampoli, L.; Gagliardi, V.; Ferrante, C.; Calvi, A.; D’Amico, F.; Tosti, F. Displacement monitoring in airport runways by persistent scatterers SAR Interferometry. Remote Sens. 2020, 12, 3564. [Google Scholar] [CrossRef]
- Bianchini Ciampoli, L.; Gagliardi, V.; Clementini, C.; Latini, D.; Del Frate, F.; Benedetto, A. Transport infrastructure monitoring by InSAR and GPR data fusion. Surv. Geophys. 2020, 41, 371–394. [Google Scholar] [CrossRef]
- D’Amico, F.; Gagliardi, V.; Bianchini Ciampoli, L.; Tosti, F. Integration of InSAR and GPR techniques for monitoring transition areas in railway bridges. NDT E Int. 2020, 115, 102291. [Google Scholar] [CrossRef]
- TRACKSCAN—A Practical, Portable and Robust Scanning System Using Infrastructure Inspection Radar (IIR) for the Investigation of Rail Track Substructure, Ballast and Tunnel Infrastructure. H20202 Project Grant agreement ID: 700138. Cordis. 2016. Available online: https://cordis.europa.eu/project/id/700138/reporting (accessed on 11 February 2021).
- Railview. Ground Penetrating Radar for the Rail Industry. 2020. Available online: https://www.railview.co.uk/sevices (accessed on 11 February 2021).
- DESTination RAIL Decision Support Tool for Rail Infrastructure Managers. Project Reference: 636285. Available online: http://www.destinationrail.eu/ (accessed on 11 February 2021).
- Hugenschmidt, J.; Mastrangelo, R. The inspection of large retaining walls using GPR. In Proceedings of the 2007 4th International Workshop on Advanced Ground Penetrating Radar, Napoli, Italy, 27–29 June 2007; IEEE: New York, NY, USA, 2007; pp. 267–271. [Google Scholar]
- Lualdi, M.; Zanzi, L.; Binda, L. Acquisition and processing requirements for high quality 3D reconstructions from GPR investigations. In Proceedings of the Proceedings, International Symposium Non-Destructive Testing in Civil Engineering (NDT-CE), Berlin, Germany, 16–19 September 2003. [Google Scholar]
- Soldovieri, F.; Persico, R.; Utsi, E.; Utsi, V. The application of inverse scattering techniques with ground penetrating radar to the problem of rebar location in concrete. NDT E Int. 2006, 39, 602–607. [Google Scholar] [CrossRef]
- Soldovieri, F.; Hugenschmidt, J.; Persico, R.; Leone, G. A linear inverse scattering algorithm for realistic GPR applications. Near Surf. Geophys. 2007, 5, 29–42. [Google Scholar] [CrossRef]
- Li, S.; Feng, X.T.; Li, Z.; Zhang, C.; Chen, B. Evolution of fractures in the excavation damaged zone of a deeply buried tunnel during TBM construction. Int. J. Rock Mech. Min. Sci. 2012, 55, 125–138. [Google Scholar] [CrossRef]
- Liu, L.; Shi, Z.; Peng, M.; Tsoflias, G.P. Investigation of Geological Anomalies at Pile Foundation Location in Urban Karst Areas Using Single Borehole Radar. Geosciences 2020, 10, 232. [Google Scholar] [CrossRef]
- Kavanagh, J.; Bowers, K.H.; Brady, K.C. The Use of Ground Penetrating Radar in the Investigation of Masonry Retaining Walls; Traffic and Transport Resource Centre, Transport Research Laboratory: Hong Kong, China, 1999. [Google Scholar]
- Athanasopoulos Zekkos, A.; Lynch, J.; Zekkos, D.; Grizi, A.; Admassu, K.; Benhamida, B.; Spino, R.J.; Mikolajczyk, M. Asset Management for Retaining Walls; Technical Report; University of Michigan: Ann Arbor, MI, USA; Volume 1001, pp. 42125–48109.
- Wiggenhauser, H.; Behrens, M.; Moser, D.; Moryson, R.M.; Pudovikov, S.; Herrmann, H.G. Non-destructive assessment of retaining wall of former coal mine plant: Zerstörungsfreie Prüfung der Stützmauer einer ehemaligen Kohlegrube. Mauerwerk 2018, 22, 175–186. [Google Scholar] [CrossRef]
- Santos-Assunçao, S.; Perez-Gracia, V.; Salinas, V.; Caselles, O.; Gonzalez-Drigo, R.; Pujades, L.G.; Lantada, N. GPR backscattering intensity analysis applied to detect paleochannels and infilled streams for seismic nanozonation in urban environments. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 167–177. [Google Scholar] [CrossRef] [Green Version]
- Salinas Naval, V.; Santos-Assunçao, S.; Pérez-Gracia, V. GPR clutter amplitude processing to detect shallow geological targets. Remote Sens. 2018, 10, 88. [Google Scholar] [CrossRef] [Green Version]
- Bao, Y.; Ghasr, M.T.; Ying, K.; Chen, G.; Zoughi, R. Microwave Synthetic Aperture Radar Imaging for Nondestructive Evaluation of Mechanically Stabilized Earth Walls. Mater. Eval. 2017, 75, 177–184. [Google Scholar]
- RILEM TC 127-MS: Non Destructive Tests for Masonry Materials and Structures. Materials and Structures/Matériaux et Constructions, Volume 34, pp. 134–143. April 2001. Available online: www.rilem.org (accessed on 11 February 2021).
- Diamanti, N.; Giannopoulos, A.; Forde, M. Numerical modelling and experimental verification of GPR to investigate ring separation in brick masonry arch bridges. NDT E Int. 2008, 41, 354–363. [Google Scholar] [CrossRef]
- Diamanti, N.; Giannopoulos, A. Employing ADI-FDTD subgrids for GPR numerical modelling and their application to study ring separation in brick masonry arch bridges. Near Surf. Geophys. 2011, 9, 245–256. [Google Scholar] [CrossRef]
- Solla, M.; Lagüela, S.; Riveiro, B.; Lorenzo, H. Non-destructive testing for the analysis of moisture in the masonry arch bridge of Lubians (Spain). Struct. Control Health Monit. 2013, 20, 1366–1376. [Google Scholar] [CrossRef]
- Biscarini, C.; Catapano, I.; Cavalagli, N.; Ludeno, G.; Pepe, F.A.; Ubertini, F. UAV photogrammetry, infrared thermography and GPR for enhancing structural and material degradation evaluation of the Roman masonry bridge of Ponte Lucano in Italy. NDT E Int. 2020, 115, 102287. [Google Scholar] [CrossRef]
- Alani, A.M.; Tosti, F.; Bianchini Ciampoli, L.; Gagliardi, V.; Benedetto, A. An integrated investigative approach in health monitoring of masonry arch bridges using GPR and InSAR technologies. NDT E Int. 2020, 115, 102288. [Google Scholar] [CrossRef]
- Puente, I.; Solla, M.; González-Jorge, H.; Arias, P. NDT documentation and evaluation of the Roman bridge of Lugo using GPR and mobile and static LiDAR. J. Perform. Constr. Facil. 2015, 29, 06014004. [Google Scholar] [CrossRef]
- Stryk, J.; Alani, A.M.; Matula, R.; Pospisil, K. Innovative Inspection Procedures for Effective GPR Surveying of Critical Transport Infrastructures (Pavements, Bridges and Tunnels). In Civil Engineering Applications of Ground Penetrating Radar; Springer Transactions in Civil and Environmental Engineering: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- SHRP 2- report S2-R06A-RR-1. In Nondestructive Testing to Identify Concrete Bridge Deck Deterioration; Transportation Research Board: Washington, DC, USA, 2013; Available online: www.TRB.org/SHRP2 (accessed on 11 February 2021).
- BASt-Report B55. Examination of GPR in Combination with Magnetic Techniques for the Determination of Moisture and Salinity of Concrete Bridge Decks with Asphalt Cover; Federal Highway Research Institute; Bundesanstalt für Straßenwesen. 2007. Available online: www.bast.de (accessed on 11 February 2021).
- Document B10—Recommendation for Nondestructive Testing of Civil Engineering Structures by GPR; German Society for Non-Destructive Testing (DGZfP): Berlin, Germany, 2008.
- AASHTO R 37-04. Standard Practice for Application of Ground Penetrating Radar (GPR) to Highways; American Association of State and Highway Transportation Officials: Washington, DC, USA, 2004.
- ACI 228.2R-98 (Reapproved 2004). Nondestructive Test Methods for Evaluation of Concrete in Structures; American Concrete Institute: Farmington Hills, MI, USA, 1998.
- NCHRP Research Report 848. In Inspection Guidelines for Bridge Post-Tensioning and Stay Cable Systems Using NDE Methods; TRB’s National Cooperative Highway Research Program: Washington, DC, USA, 2017. [CrossRef]
- Lalagüe, A.; Lebens, M.A.; Hoff, I.; Grøv, E. Detection of rockfall on a tunnel concrete lining with ground-penetrating radar (GPR). Rock Mech. Rock Eng. 2016, 49, 2811–2823. [Google Scholar] [CrossRef]
- Balaguer, C.; Montero, R.; Victores, J.G.; Martínez, S.; Jardón, A. Towards fully automated tunnel inspection: A survey and future trends. In Proceedings of the 31st International Symposium on Automation and Robotics in Construction and Mining (ISARC 2014), Sydney, Australia, 9–11 July 2014. [Google Scholar] [CrossRef]
- Xie, X.Y.; Chen, Y.F.; Zhou, B. Data processing of backfill grouting detected by GPR in shield tunnel and research on equipment of GPR antenna. In Proceedings of the 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016. [Google Scholar] [CrossRef]
- SHRP-2 Report S2-R06G-RR-1. In Mapping Voids, Debonding, Delaminations, Moisture, and Other Defects behind or within Tunnel Linings; Transportation Research Board: Washington, DC, USA, 2014; Available online: www.TRB.org/SHRP2 (accessed on 11 February 2021).
- Lyu, Y.; Wang, H.; Gong, J. GPR detection of tunnel lining cavities and reverse-time migration imaging. Appl. Geophys. 2020, 17, 1–7. [Google Scholar] [CrossRef]
- Karlovšek, J.; Scheuermann, A.; Willimas, D.J. Investigation of voids and cavities in Bored Tunnels using GPR. In Proceedings of the 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012. [Google Scholar] [CrossRef]
- Garcia-Fernandez, M.; Alvarez-Lopez, Y.; Las Heras, F. Autonomous airborne 3D SAR imaging system for subsurface sensing: UWB-GPR on board a UAV for landmine and IED detection. Remote Sens. 2019, 11, 2357. [Google Scholar] [CrossRef] [Green Version]
- Wu, K.; Rodriguez, G.A.; Zajc, M.; Jacquemin, E.; Clément, M.; De Coster, A.; Lambot, S. A new drone-borne GPR for soil moisture mapping. Remote Sens. Environ. 2019, 235, 111456. [Google Scholar] [CrossRef]
- Šipoš, D.; Gleich, D. A Lightweight and Low-Power UAV-Borne Ground Penetrating Radar Design for Landmine Detection. Sensors 2020, 20, 2234. [Google Scholar] [CrossRef] [Green Version]
- Howlader, M.O.F.; Sattar, T.P.; Dudley, S. Development of a Wall Climbing Robotic Ground Penetrating Radar System for Inspection of Vertical Concrete Structures. Int. J. Mech. Mechatron. Eng. 2016, 10, 1382–1388. [Google Scholar]
- Yangí, L.; Yang, G.; Liu, Z.; Chang, Y.; Jiang, B.; Awad, Y.; Xiao, J. Wall-climbing robot for visual and GPR inspection. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; IEEE: New York, NY, USA, 2018; pp. 1004–1009. [Google Scholar] [CrossRef]
- Bertolino, M.; Tanzi, T.J. Towards 3D Simulation for Disaster Intervention Robot Behaviour Assessment. Adv. Radio Sci. 2020, 18, 23–32. [Google Scholar] [CrossRef]
- Gibb, S.; La, H.M.; Le, T.; Nguyen, L.; Schmid, R.; Pham, H. Nondestructive evaluation sensor fusion with autonomous robotic system for civil infrastructure inspection. J. Field Robot. 2018, 35, 988–1004. [Google Scholar] [CrossRef]
- Pochanin, G.; Varianytsia-Roshchupkina, L.; Ruban, V.; Pochanina, I.; Falorni, P.; Borgioli, G.; Capineri, L.; Bechtel, T. Design and simulation of a “single transmitter-four receiver” impulse GPR for detection of buried landmines. In Proceedings of the 2017 9th International Workshop on Advanced Ground Penetrating Radar (IWAGPR), Edinburgh, UK, 28–30 June 2017; IEEE: New York, NY, USA, 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Travassos, X.L.; Avila, S.L.; Ida, N. Artificial Neural Networks and Machine Learning techniques applied to Ground Penetrating Radar: A review. Appl. Comput. Inform. 2020. [Google Scholar] [CrossRef]
- Liu, T.; Su, Y.; Huang, C. Inversion of Ground Penetrating Radar Data Based on Neural Networks. Remote Sens. 2018, 10, 730. [Google Scholar] [CrossRef] [Green Version]
- Kang, M.-S.; An, Y.-K. Frequency–Wavenumber Analysis of Deep Learning-based Super Resolution 3D GPR Images. Remote Sens. 2020, 12, 3056. [Google Scholar] [CrossRef]
- Liu, B.; Ren, Y.; Liu, H.; Xu, H.; Wang, Z.; Cohn, A.; Jiang, P. GPRInvNet: Deep Learning-Based Ground Penetrating Radar Data Inversion for Tunnel Lining; Cornell University: Ithaca, NY, USA, 2020. [Google Scholar]
- Asadi, P.; Gindy, M.; Alvarez, M. A Machine Learning Based Approach for Automatic Rebar Detection and Quantification of Deterioration in Concrete Bridge Deck Ground Penetrating Radar B-scan Images. Ksce J. Civ. Eng. 2019, 23, 2618–2627. [Google Scholar] [CrossRef]
- Zhang, Y.; Venkatachalam, A.; Xia, T. Ground-penetrating radar railroad ballast inspection with an unsupervised algorithm to boost the region of interest detection efficiency. J. Appl. Remote Sens. 2015, 9, 1–19. [Google Scholar] [CrossRef]
- Xu, X.; Lei, Y.; Yang, F. Railway Subgrade Defect Automatic Recognition Method Based on Improved Faster R-CNN. Sci. Program. 2018, 2018, 4832972. [Google Scholar] [CrossRef] [Green Version]
- Deshpande, J. Geographical Information System & Building Information Modelling; ADCC Infocad IT Services: Dubai, United Arab Emirates, 2020. [Google Scholar]
- Solla, M.; Gonçalves, L.M.S.; Gonçalves, G.; Francisco, C.; Puente, I.; Providência, P.; Gaspar, F.; Rodrigues, H. A Building Information Modeling Approach to Integrate Geomatic Data for the Documentation and Preservation of Cultural Heritage. Remote Sens. 2020, 12, 4028. [Google Scholar] [CrossRef]
- Šarlah, N.; Podobnikar, T.; Ambrožič, T.; Mušič, B. Application of Kinematic GPR-TPS Model with High 3D Georeference Accuracy for Underground Utility Infrastructure Mapping: A Case Study from Urban Sites in Celje, Slovenia. Remote Sens. 2020, 12, 1228. [Google Scholar] [CrossRef] [Green Version]
- GEOFIT “Deployment of Novel GEOthermal Systems, Technologies and Tools for Energy Efficient Building retroFITting” Project (Grant Agreement ID 792210) (May 2018–April 2022). Available online: https://cordis.europa.eu/project/id/792210 (accessed on 24 December 2020).
- Assets4Rail “Measuring, Monitoring and Data Handling for Railway Assets; Bridges, Tunnels, Tracks and Safety Systems” Project (Grant Agreement ID 826250) (December 2018–May 2021). Available online: https://cordis.europa.eu/project/id/826250 (accessed on 24 December 2020).
- IM-SAFE “Harmonised Transport Infrastructure Monitoring in Europe for Optimal Maintenance and Safety” Project (Grant Agreement ID 958171). (November 2020–April 2023). Available online: https://cordis.europa.eu/project/id/958171/pl (accessed on 30 November 2020).










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Solla, M.; Pérez-Gracia, V.; Fontul, S. A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sens. 2021, 13, 672. https://doi.org/10.3390/rs13040672
Solla M, Pérez-Gracia V, Fontul S. A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sensing. 2021; 13(4):672. https://doi.org/10.3390/rs13040672
Chicago/Turabian StyleSolla, Mercedes, Vega Pérez-Gracia, and Simona Fontul. 2021. "A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices" Remote Sensing 13, no. 4: 672. https://doi.org/10.3390/rs13040672
APA StyleSolla, M., Pérez-Gracia, V., & Fontul, S. (2021). A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sensing, 13(4), 672. https://doi.org/10.3390/rs13040672