
Multiple RFI Sources Location Method Combining Two-Dimensional ESPRIT DOA Estimation and Particle Swarm Optimization for Spaceborne SAR


Abstract
:
1. Introduction
2. Geometry and Signal Model
2.1. Geometry Model
- All the channels are independent and isotropic.
- The distance between adjacent channels is not more than half the wavelength of the RFI signal.
2.2. Signal Model
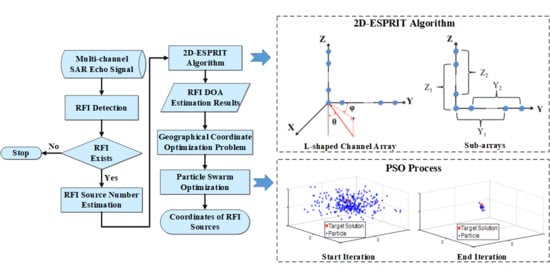
3. Multiple RFI Sources Geolocation Method
3.1. RFI Detection
3.2. RFI Source Number Estimation
3.3. RFI DOA Estimation
- Step 1: In accordance with Equation (21) to get , , , and .
- Step 2: Construct with Equation (27), and perform singular value decomposition on it to get the signal subspace .
- Step 3: Calculate and with Equations (32) and (36).
- Step 4: Perform singular value decomposition on and to get and , and .
- Step 5: Perform pair-matching procedure with Equation (40).
- Step 6: Obtain and with Equations (34) and (38).
3.4. RFI Sources Geolocation Estimation
4. Simulation Experiments and Results
4.1. System Establishment and Parameter Setting
- Case 1. A single RFI source.
- Case 2. Multiple RFI sources of the same interference type.
- Case 3. Multiple RFI sources of mixed types.
4.2. Simulation Experiments and Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Natsuaki, R.; Motohka, T.; Watanabe, M.; Shimada, M.; Suzuki, S. An Autocorrelation-Based Radio Frequency Interference Detection and Removal Method in Azimuth-Frequency Domain for SAR Image. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1–16. [Google Scholar] [CrossRef]
- Tao, M.; Zhou, F.; Zhang, Z. Wideband Interference Mitigation in High-Resolution Airborne Synthetic Aperture Radar Data. IEEE Trans. Geosci. Remote Sens. 2015, 54, 74–87. [Google Scholar] [CrossRef]
- Yang, Z.; Du, W.; Liu, Z.; Liao, G. WBI Suppression for SAR Using Iterative Adaptive Method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 9, 1008–1014. [Google Scholar] [CrossRef]
- Tao, M.; Zhou, F.; Liu, J.; Liu, Y.; Zhang, Z.; Bao, Z. Narrow-Band Interference Mitigation for SAR Using Independent Subspace Analysis. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5289–5301. [Google Scholar]
- Zhou, F.; Tao, M. Research on Methods for Narrow-Band Interference Suppression in Synthetic Aperture Radar Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 8, 3476–3485. [Google Scholar] [CrossRef]
- Zhou, F.; Tao, M.; Bai, X.; Liu, J. Narrow-Band Interference Suppression for SAR Based on Independent Component Analysis. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4952–4960. [Google Scholar] [CrossRef]
- Meyer, F.J.; Nicoll, J.B.; Doulgeris, A.P. Correction and Characterization of Radio Frequency Interference Signatures in L-Band Synthetic Aperture Radar Data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4961–4972. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Xing, M.; Guo, R.; Zhang, L.; Bao, Z. Interference suppression algorithm for SAR based on time–frequency transform. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3765–3779. [Google Scholar] [CrossRef]
- Rosenberg, L.; Gray, D.A. Constrained Fast-Time STAP for Interference Suppression in Multichannel SAR. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1792–1805. [Google Scholar] [CrossRef]
- Bollian, T.; Osmanoglu, B.; Rincon, R.; Lee, S.K.; Fatoyinbo, T. Adaptive Antenna Pattern Notching of Interference in Synthetic Aperture Radar Data Using Digital Beamforming. Remote Sens. 2019, 11, 1346. [Google Scholar] [CrossRef] [Green Version]
- Bollian, T.; Osmanoglu, B.; Rincon, R.F.; Lee, S.K.; Fatoyinbo, T.E. Detection and Geolocation of P-Band Radio Frequency Interference Using EcoSAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1–9. [Google Scholar] [CrossRef]
- Li, J.; Hu, F.; He, F.; Wu, L. High-Resolution RFI Localization Using Covariance Matrix Augmentation in Synthetic Aperture Interferometric Radiometry. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1186–1198. [Google Scholar] [CrossRef]
- Hu, F.; Wu, L.; Li, J.; Peng, X.; Zhu, D.; Cheng, Y. RFI localization in synthetic aperture interferometric radiometers based on sparse Bayesian inference. Int. J. Remote Sens. 2017, 38, 5502–5523. [Google Scholar] [CrossRef]
- Gu, J.F.; Zhu, W.P.; Swamy, M.N.S. Joint 2-D DOA estimation via sparse L-shaped array. IEEE Trans. Signal Process. 2015, 63, 1171–1182. [Google Scholar] [CrossRef]
- Dong, Y.Y.; Dong, C.X.; Liu, W.; Chen, H.; Zhao, G.Q. 2-D DOA estimation for L-shaped array with array aperture and snapshots extension techniques. IEEE Signal Process. Lett. 2017, 24, 495–499. [Google Scholar] [CrossRef]
- Tao, M.; Su, J.; Huang, Y.; Wang, L. Mitigation of Radio Frequency Interference in Synthetic Aperture Radar Data: Current Status and Future Trends. Remote Sens. 2019, 11, 2438. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Li, J.; Sun, B.; Chen, J.; Li, C.; Li, W.; Xu, L. Single RFI Localization Based on Conjugate Cross-Correlation of Dual-Channel SAR Signals. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar]
- Liang, J.; Liu, D. Joint Elevation and Azimuth Direction Finding Using L-Shaped Array. IEEE Trans. Antennas Propag. 2010, 58, 2136–2141. [Google Scholar] [CrossRef]
- Yu, J.; Li, J.; Sun, B.; Chen, J.; Li, C. Multiclass Radio Frequency Interference Detection and Suppression for SAR Based on the Single Shot MultiBox Detector. Sensors 2018, 18, 4034. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Junfei, Y.; Jingwen, L.; Bing, S.; Yuming, J. Barrage Jamming Detection and Classification Based on Convolutional Neural Network for Synthetic Aperture Radar. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Meyer, F.J.; Nicoll, J.B.; Doulgeris, A.P. Characterization and extent of randomly-changing radio frequency interference in ALOS PALSAR data. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 2448–2451. [Google Scholar]
- Wax, M.; Kailath, T. Detection of signals by information theoretic criteria. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 387–392. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.O.; Adalı, T.; Calhoun, V.D. Estimating the number of independent components for functional magnetic resonance imaging data. Hum. Brain Mapp. 2007, 28, 1251–1266. [Google Scholar] [CrossRef] [PubMed]
- Tayem, N.; Majeed, K.; Hussain, A.A. Two-Dimensional DOA Estimation Using Cross-Correlation Matrix with L-Shaped Array. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1077–1080. [Google Scholar] [CrossRef]
- Cheng, Q.; Zhao, Y.; Yang, J. Improvement of 2-D DOA estimation based on L-shaped array. In Proceedings of the ISAPE2012, Xi’an, China, 22–26 October 2012. [Google Scholar]
- Yang, X.; Zheng, Z.; Ko, C.C.; Zhong, L. Low-complexity 2D parameter estimation of coherently distributed noncircular signals using modified propagator. Multidimens. Syst. Signal Process. 2017, 28, 407–426. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm—Explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef] [Green Version]
- Suganthan, P.N. Particle swarm optimiser with neighbourhood operator. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99, Washington, DC, USA, 6–9 July 1999; pp. 1958–1962. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Pulse Width (μs) | 5 |
| Bandwidth (MHz) | 90 |
| Sampling Frequency (MHz) | 100 |
| Pulse Repetition Frequency (Hz) | 1000 |
| Receive Window Width (μs) | 20 |
| Average Orbit Height (km) | 500 |
| Average Speed (km/s) | 7.61 |
| Wavelength (m) | 0.30 |
| Distance between adjacent channel (m) | 0.15 |
| Number of channels | 19 |
| Signal-to-Noise Ratio (dB) | −15 |
| Type of RFI | Parameters | Range | Distribution |
|---|---|---|---|
| RFNI | Frequency (KHz) | Uniform | |
| Pulse Width (μs) | Uniform | ||
| Amplitude(dB) | Uniform | ||
| Phase | Uniform | ||
| NBLFMI | Bandwidth (MHz) | Uniform | |
| Pulse Width (μs) | Uniform | ||
| Amplitude (dB) | Uniform | ||
| Phase | Uniform | ||
| WBLFMI | Bandwidth (MHz) | Uniform | |
| Pulse Width (μs) | Uniform | ||
| Amplitude (dB) | Uniform | ||
| Phase | Uniform |
| Case | Type of RFI | |
|---|---|---|
| Case 1 | RFNI | 28.83 |
| NBLFMI | 27.82 | |
| WBLFMI | 27.03 | |
| Case 2 | RFNI | 25.66 |
| NBLFMI | 23.65 | |
| WBLFMI | 19.84 | |
| Case 3 | Mixed RFI | 21.92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Li, J.; Sun, B.; Jiang, Y.; Xu, L. Multiple RFI Sources Location Method Combining Two-Dimensional ESPRIT DOA Estimation and Particle Swarm Optimization for Spaceborne SAR. Remote Sens. 2021, 13, 1207. https://doi.org/10.3390/rs13061207
Yu J, Li J, Sun B, Jiang Y, Xu L. Multiple RFI Sources Location Method Combining Two-Dimensional ESPRIT DOA Estimation and Particle Swarm Optimization for Spaceborne SAR. Remote Sensing. 2021; 13(6):1207. https://doi.org/10.3390/rs13061207
Chicago/Turabian StyleYu, Junfei, Jingwen Li, Bing Sun, Yuming Jiang, and Liying Xu. 2021. "Multiple RFI Sources Location Method Combining Two-Dimensional ESPRIT DOA Estimation and Particle Swarm Optimization for Spaceborne SAR" Remote Sensing 13, no. 6: 1207. https://doi.org/10.3390/rs13061207
APA StyleYu, J., Li, J., Sun, B., Jiang, Y., & Xu, L. (2021). Multiple RFI Sources Location Method Combining Two-Dimensional ESPRIT DOA Estimation and Particle Swarm Optimization for Spaceborne SAR. Remote Sensing, 13(6), 1207. https://doi.org/10.3390/rs13061207