
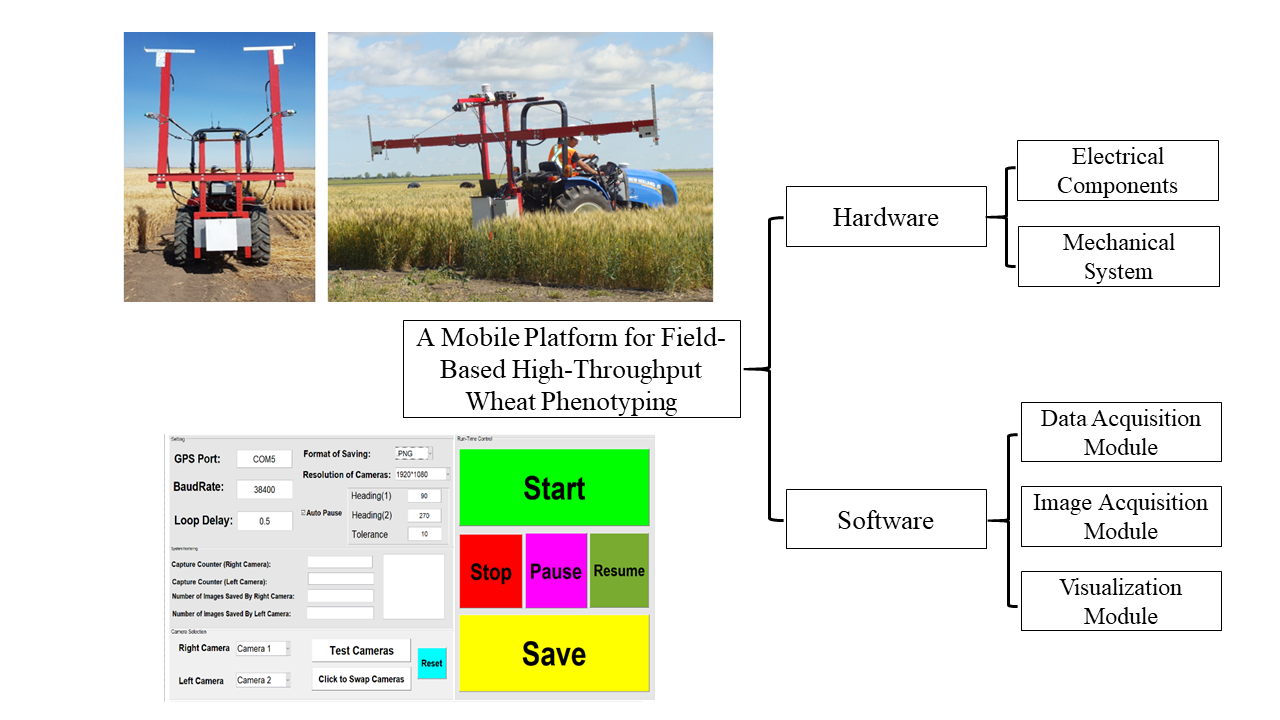
Development of a Mobile Platform for Field-Based High-Throughput Wheat Phenotyping



Abstract
:
1. Introduction
- Attachability to the existing agricultural vehicles, such as a 6-feet Tractor or Swather*.
- Ability to utilize for phenotyping of different crops, such as wheat, canola and peas*. Moreover, it is able to monitor various traits of target crop, simultaneously.
- Capability to collect and compare crop temperature with ambient temperature for each instant.
- Geo-referencing collected data to the plot level using a GPS receiver of the vehicle (RTK or RTX)*. Other developed platforms do not tag data to plot level at collection time.
- Relatively fast sampling rates for recording data (250 ms) and capturing pictures (500 ms)*. Similar platforms sampling rate is around 750 ms.
- Performing data collection for different stages of growth without any effects on the canopies.
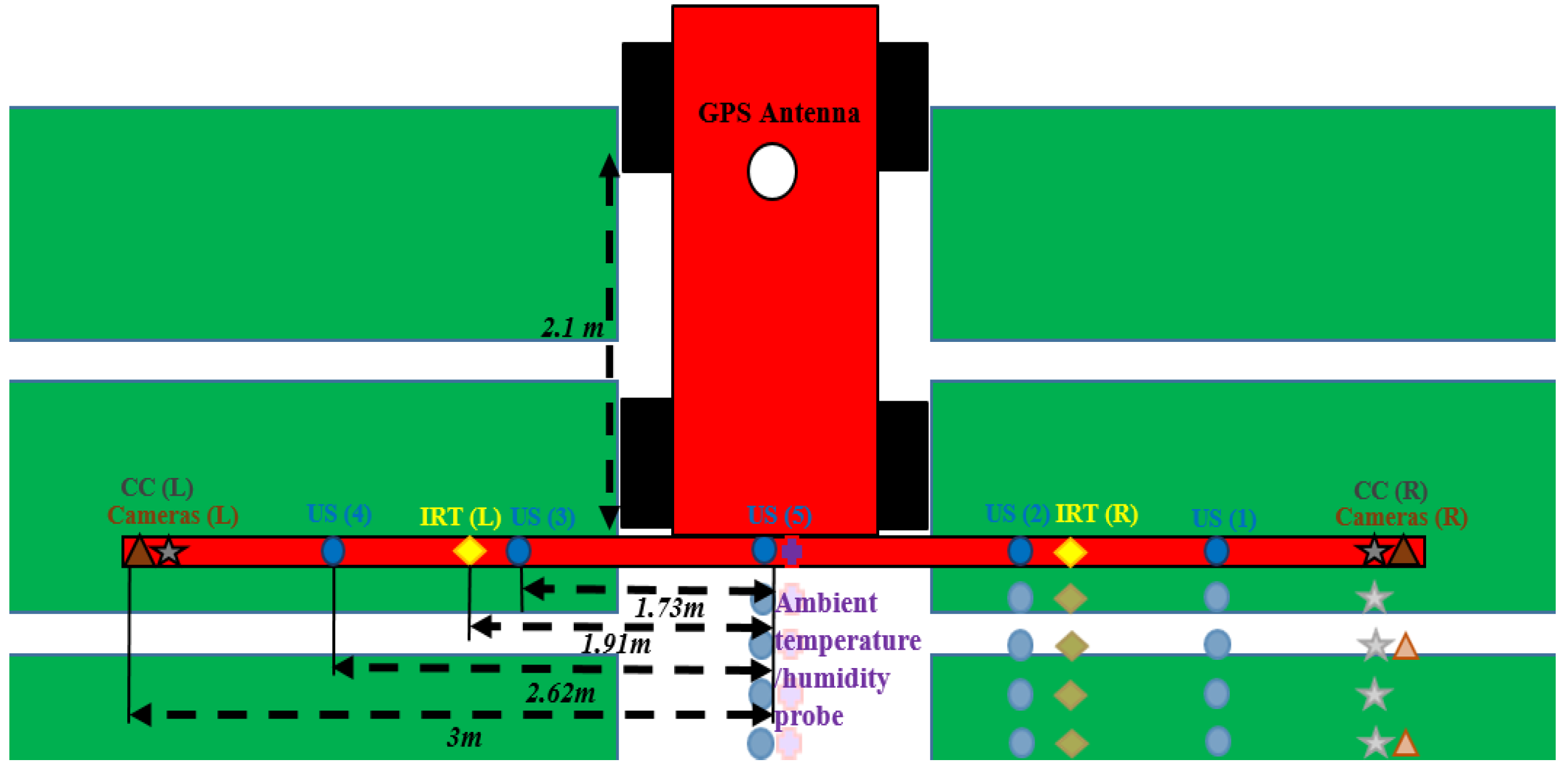
- Ability to collect up to 10 records per plot with dimensions of 1.2 × 3.6 m.
- Ability to adjust sensor’s location/height based on crop’s stages of growth.
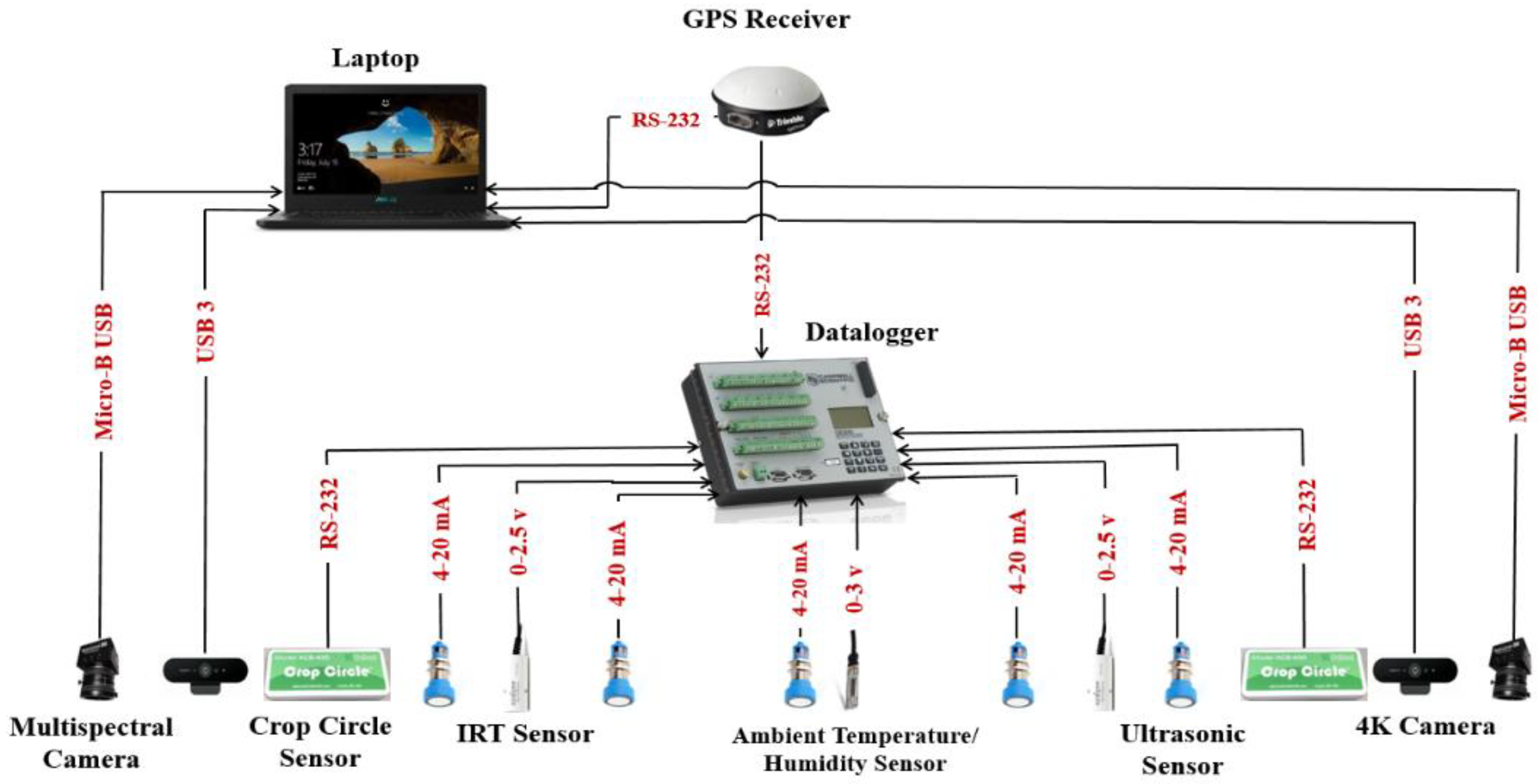
2. Materials and Methods
2.1. Electrical Components
2.1.1. NDVI Measurement by Crop Circle Sensor
2.1.2. Temperature and Humidity Measurement by Infra-Red Thermometer and Weather Station
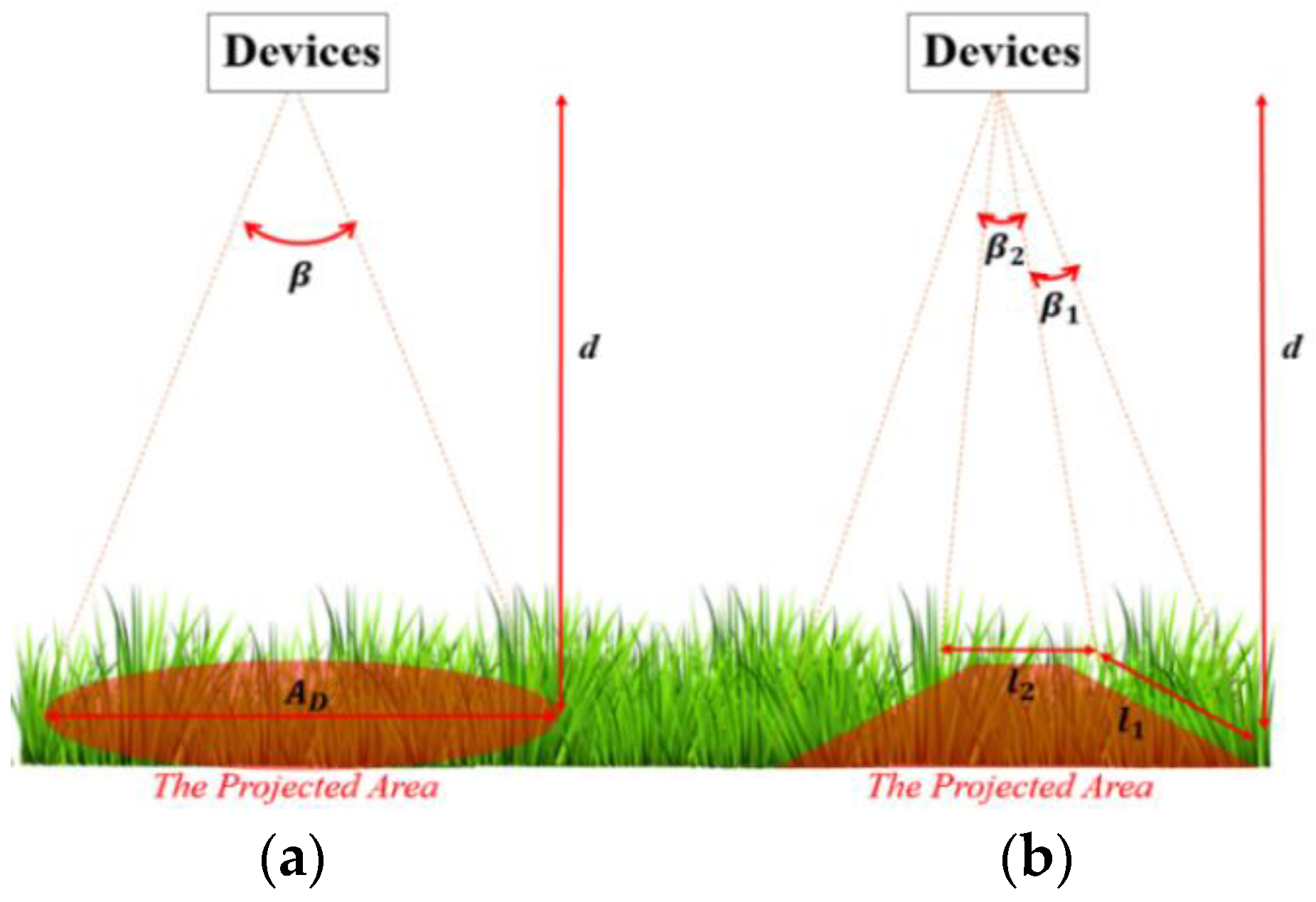
2.1.3. Height Measurement by Ultrasonic Sensor
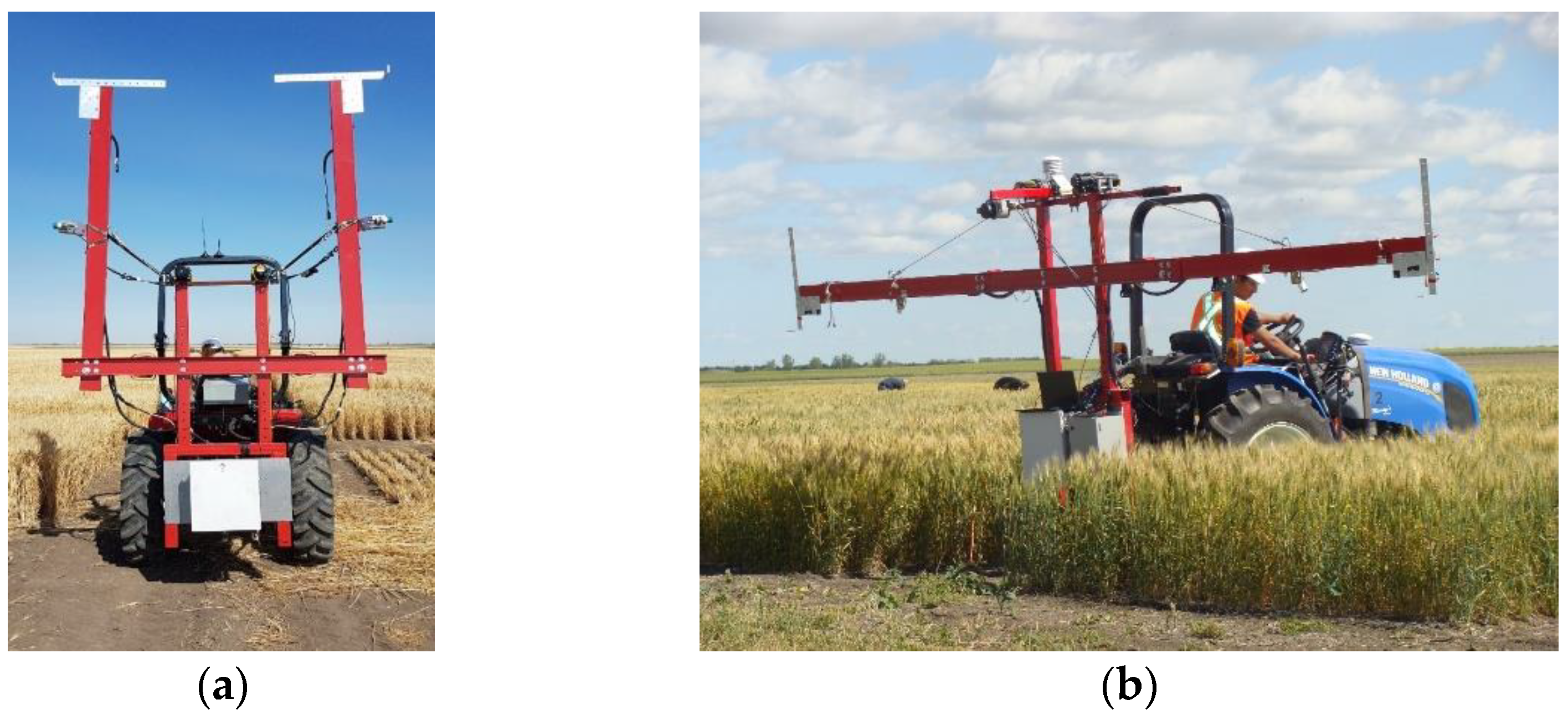
2.2. Mechanical System
2.3. Software Development
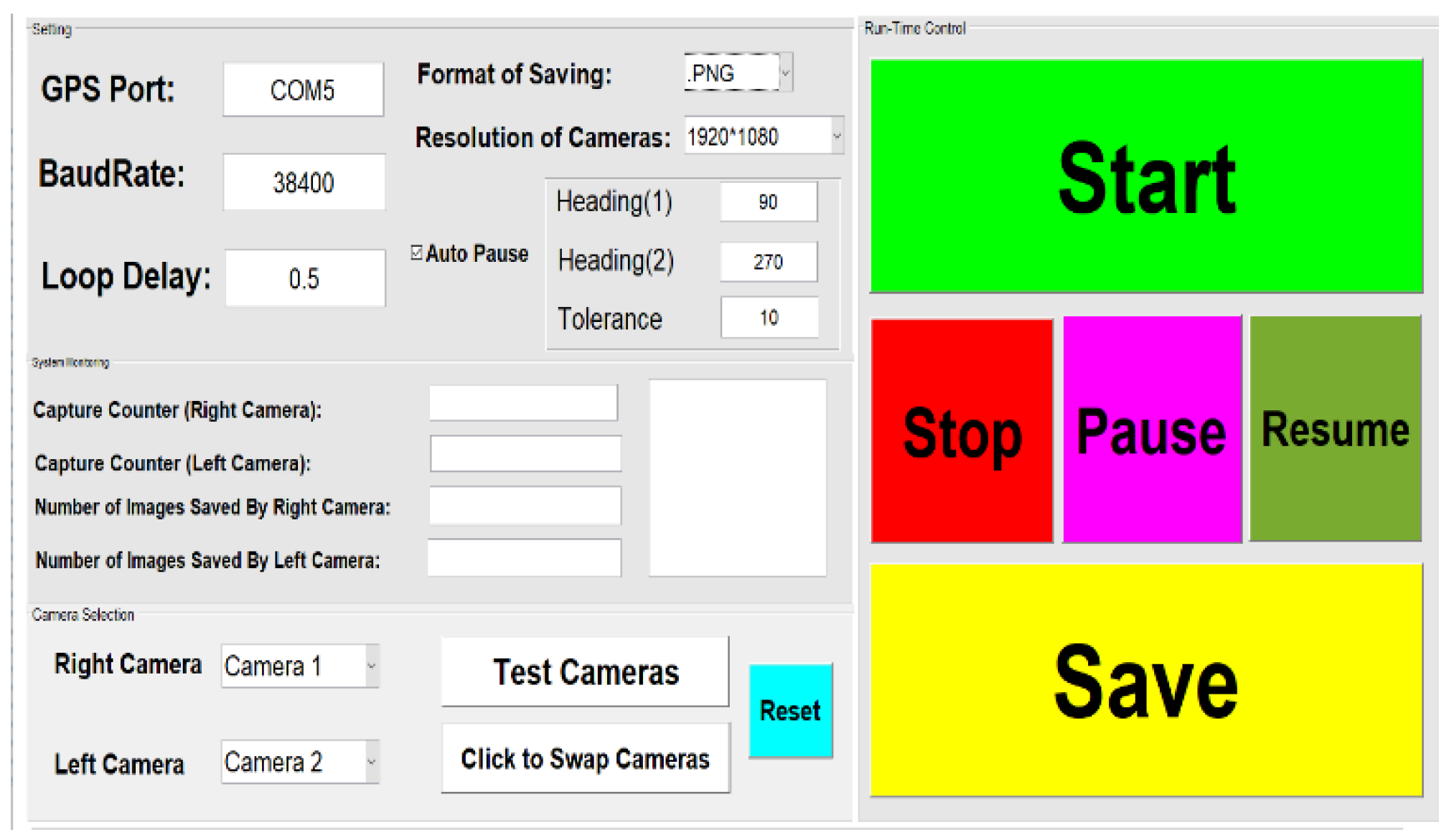
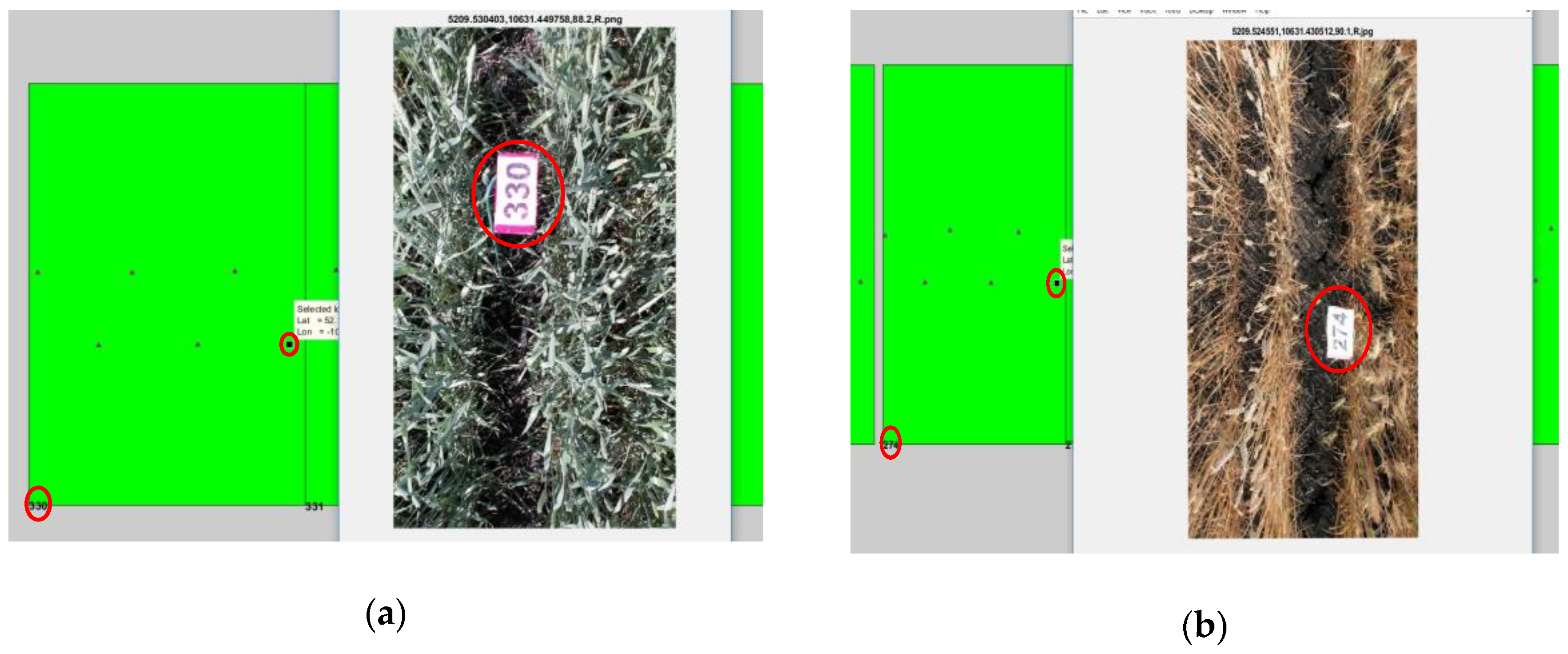
2.3.1. Image Acquisition Module
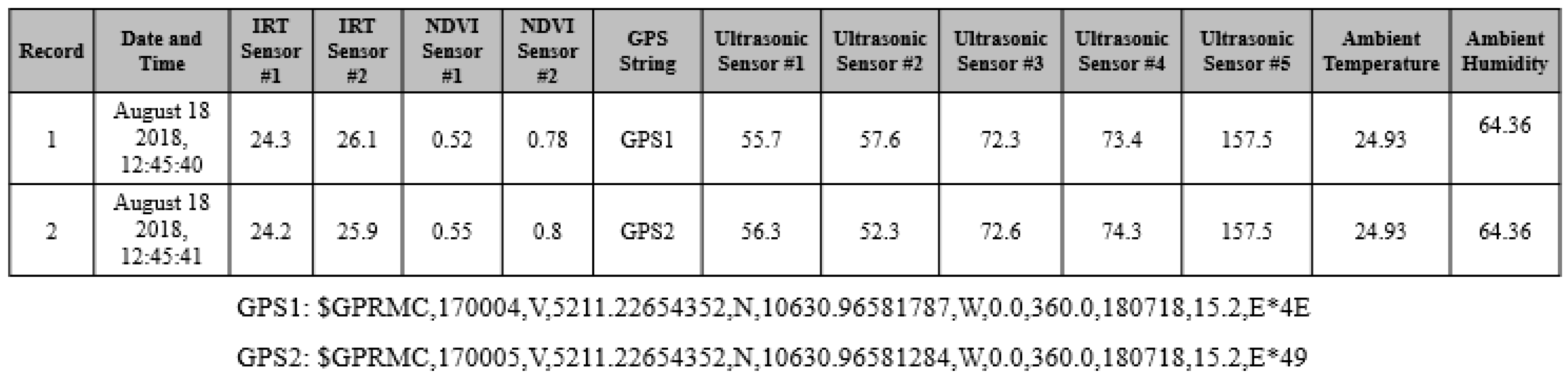
2.3.2. Data Acquisition Module
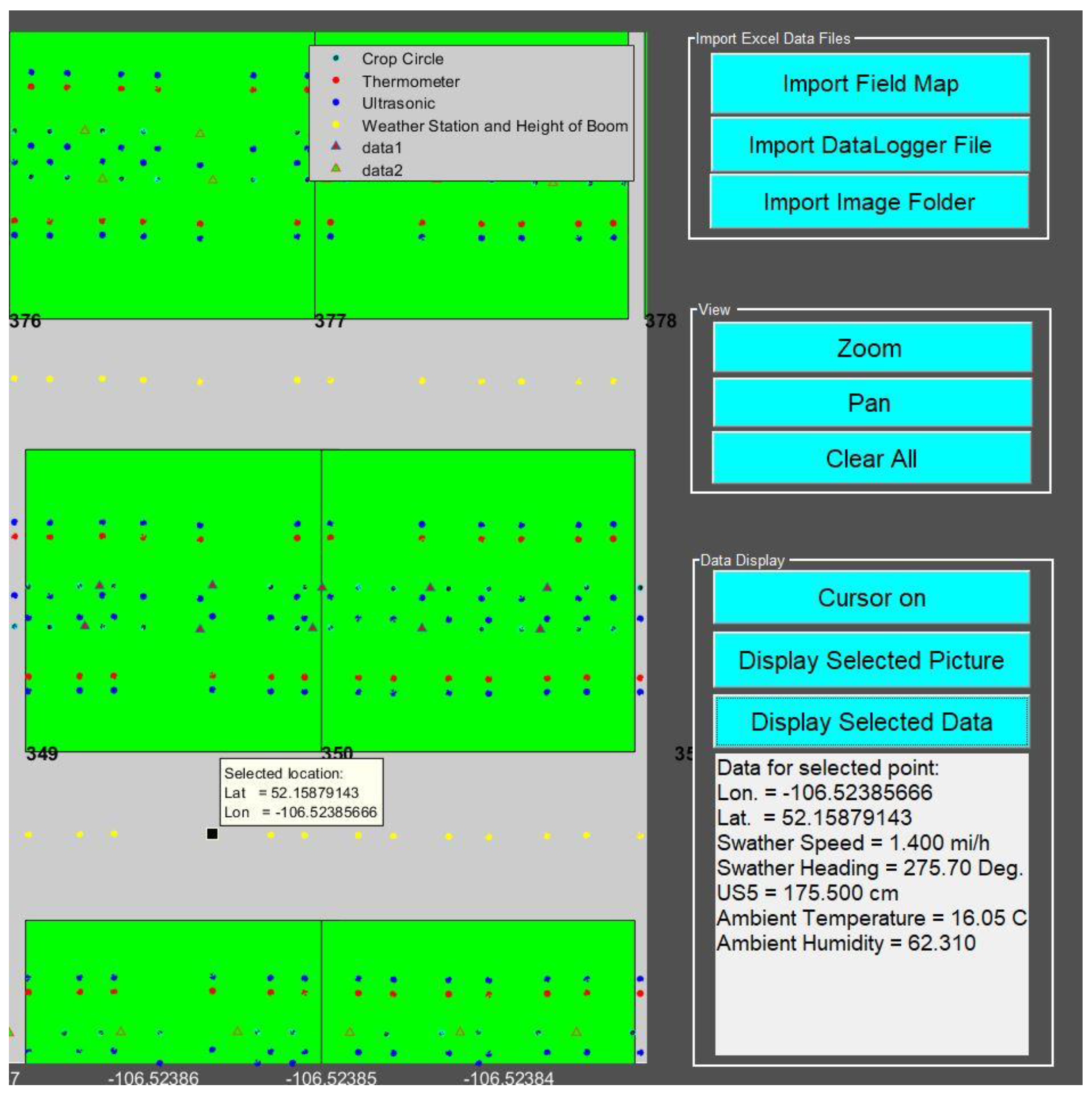
2.3.3. Visualization Module
3. Results
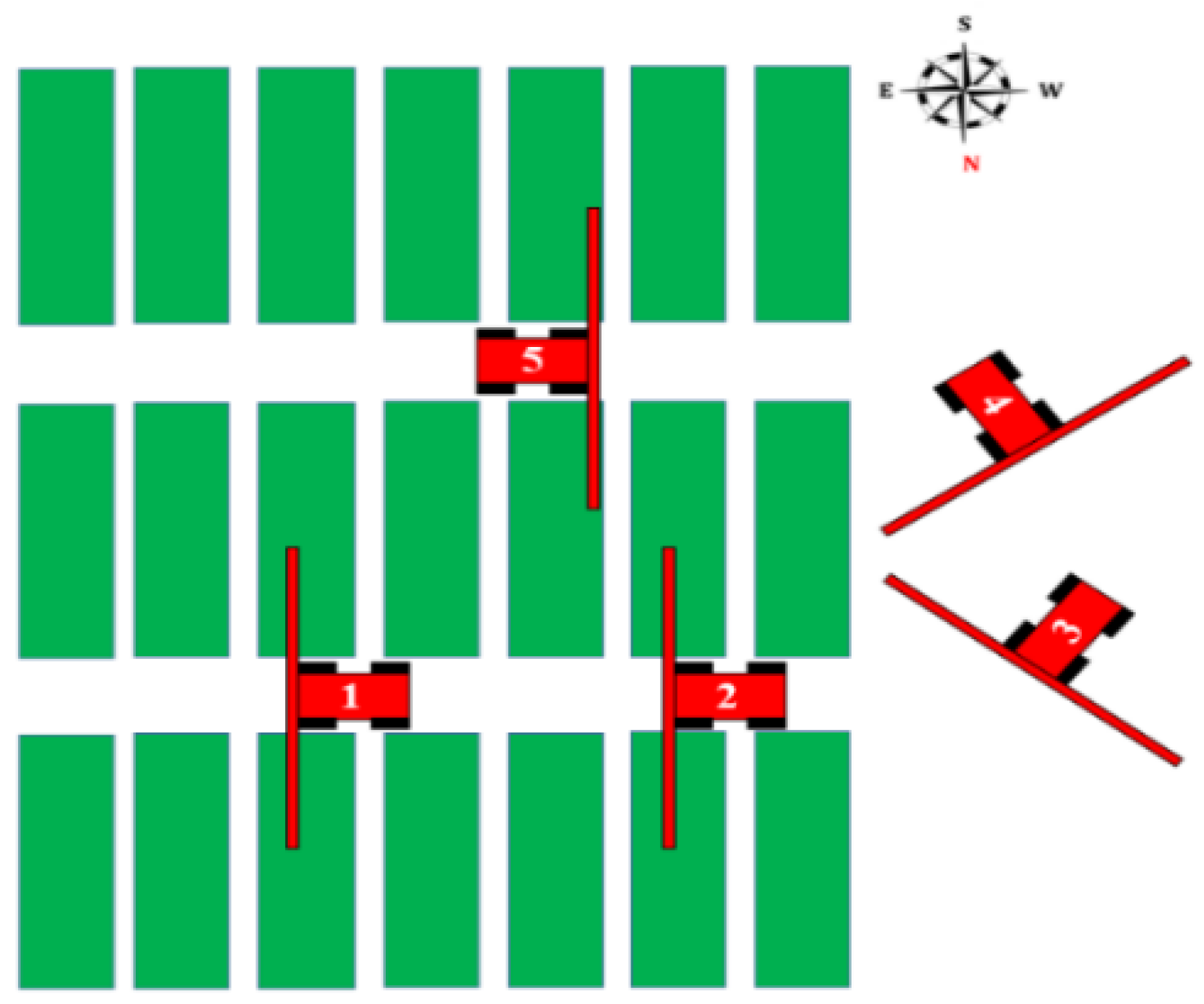
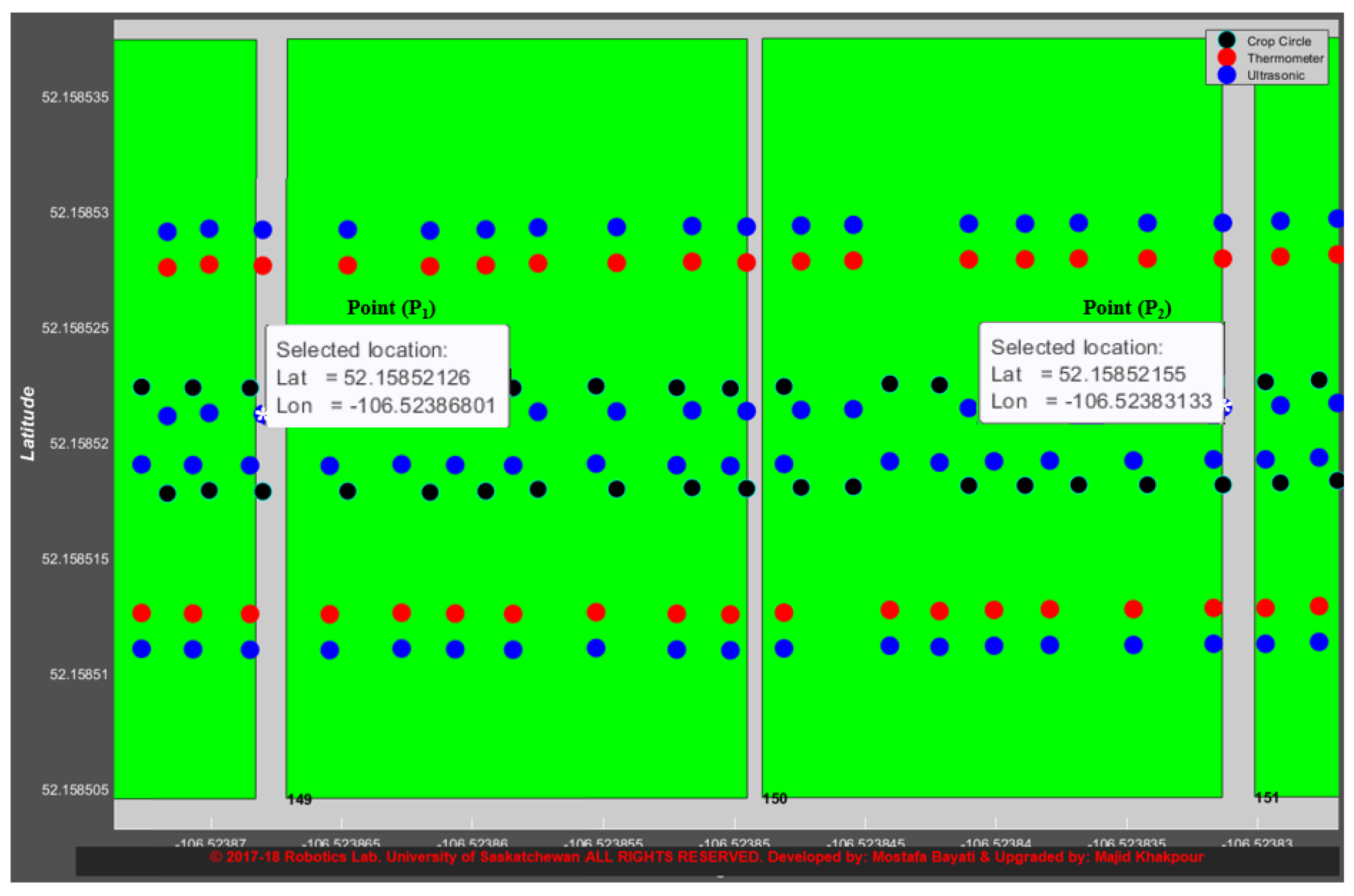
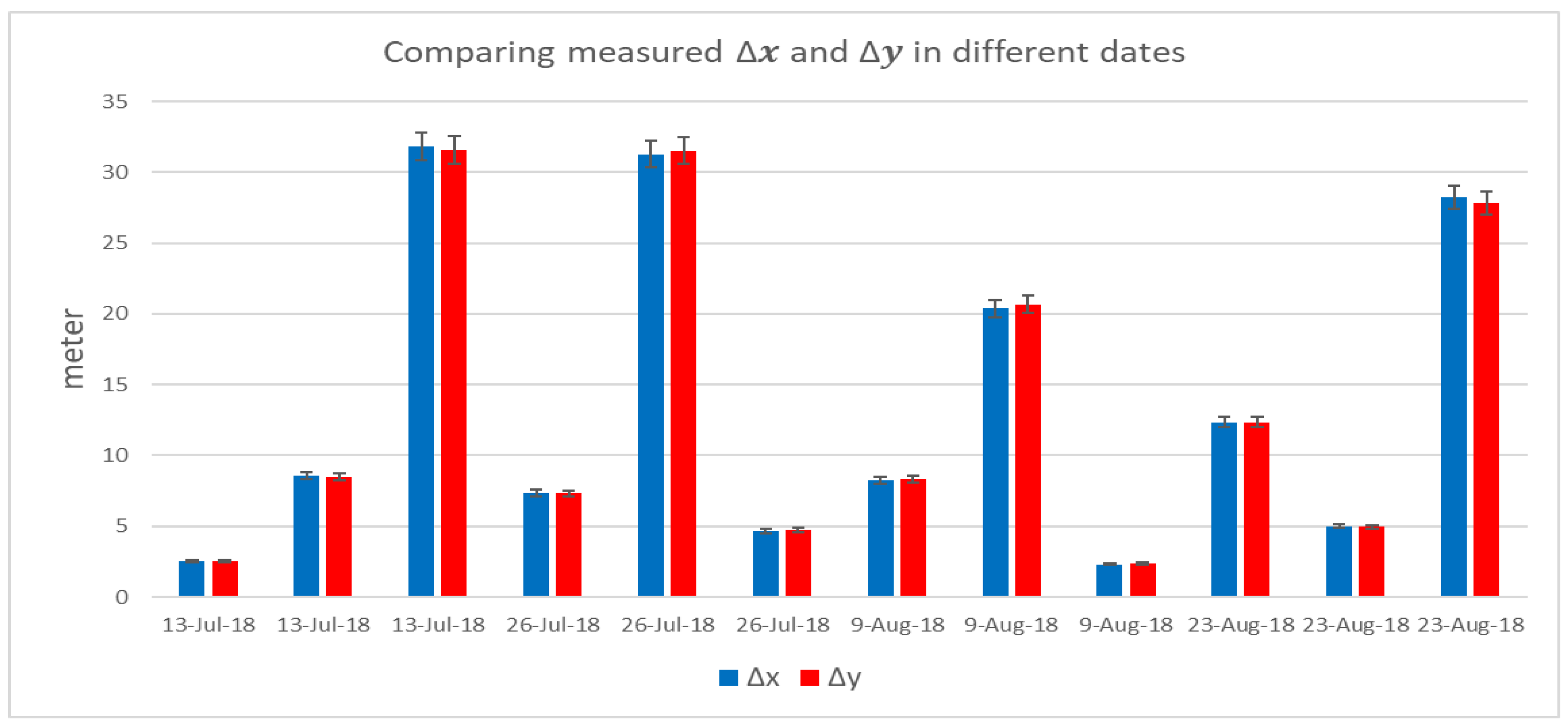
3.1. Verifying the Validity of Geo-Referenced Data
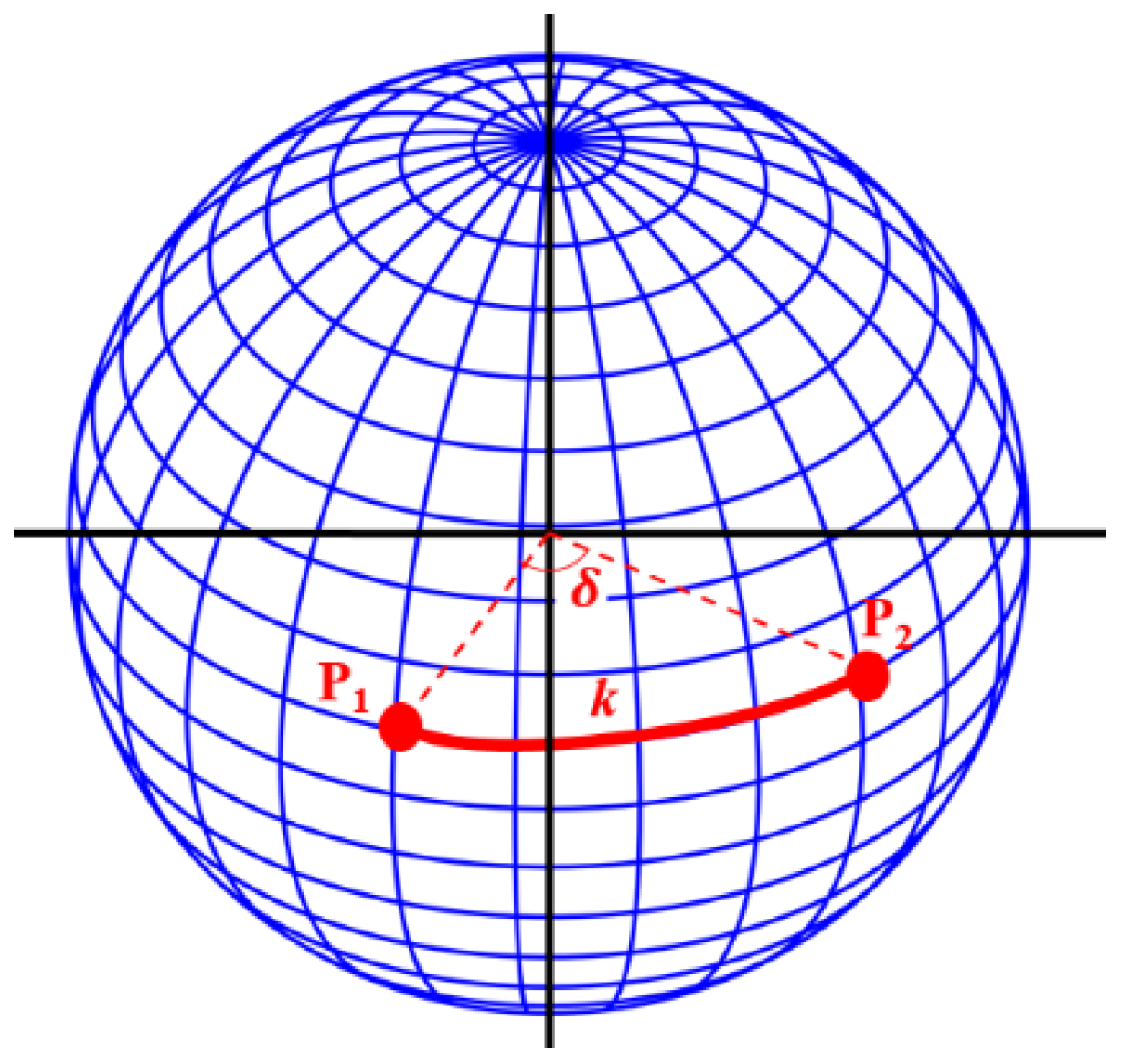
3.2. Analyzing Delay in the Process of Geo-Referencing
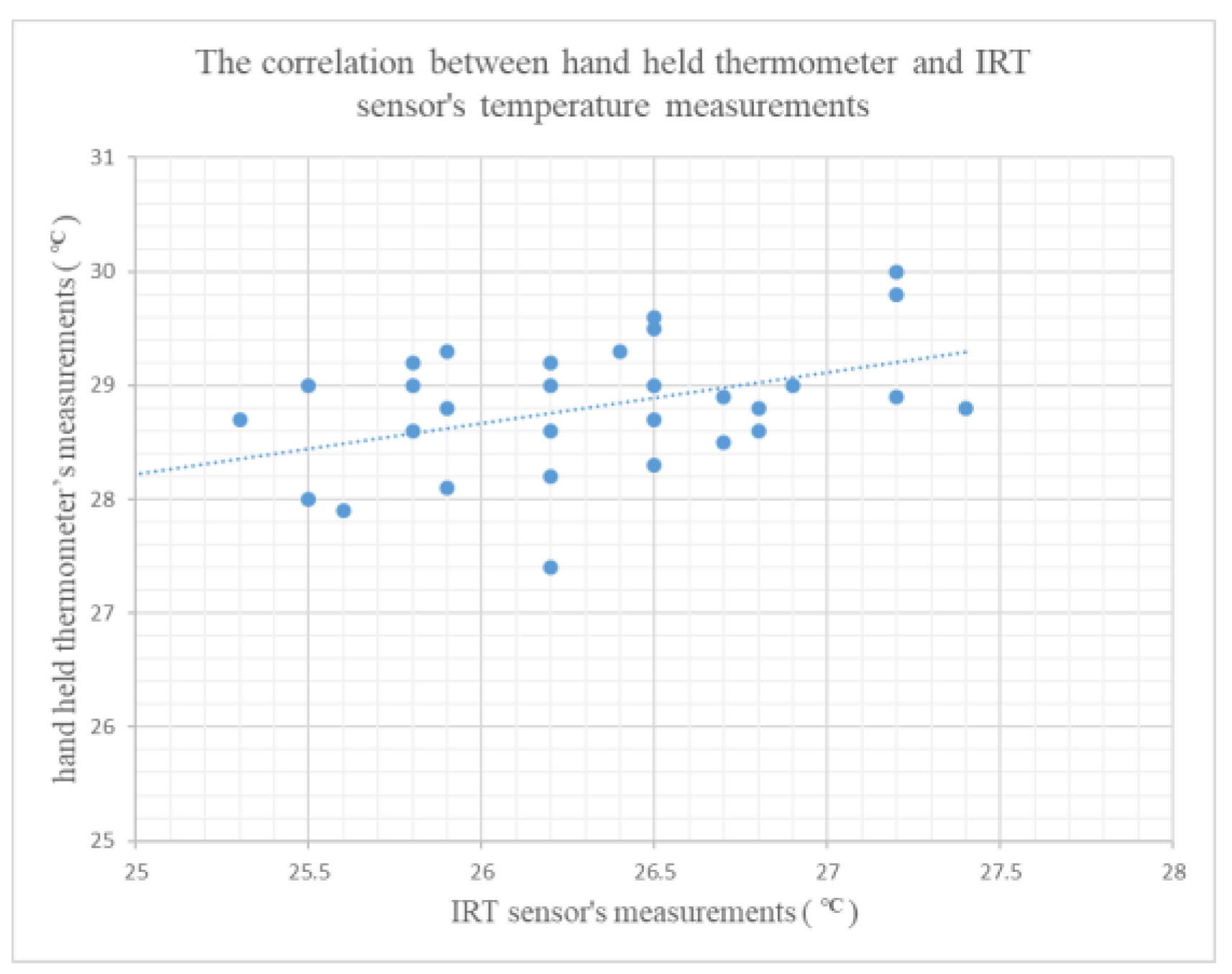
3.3. Accuracy of Crops Temperature Measurement
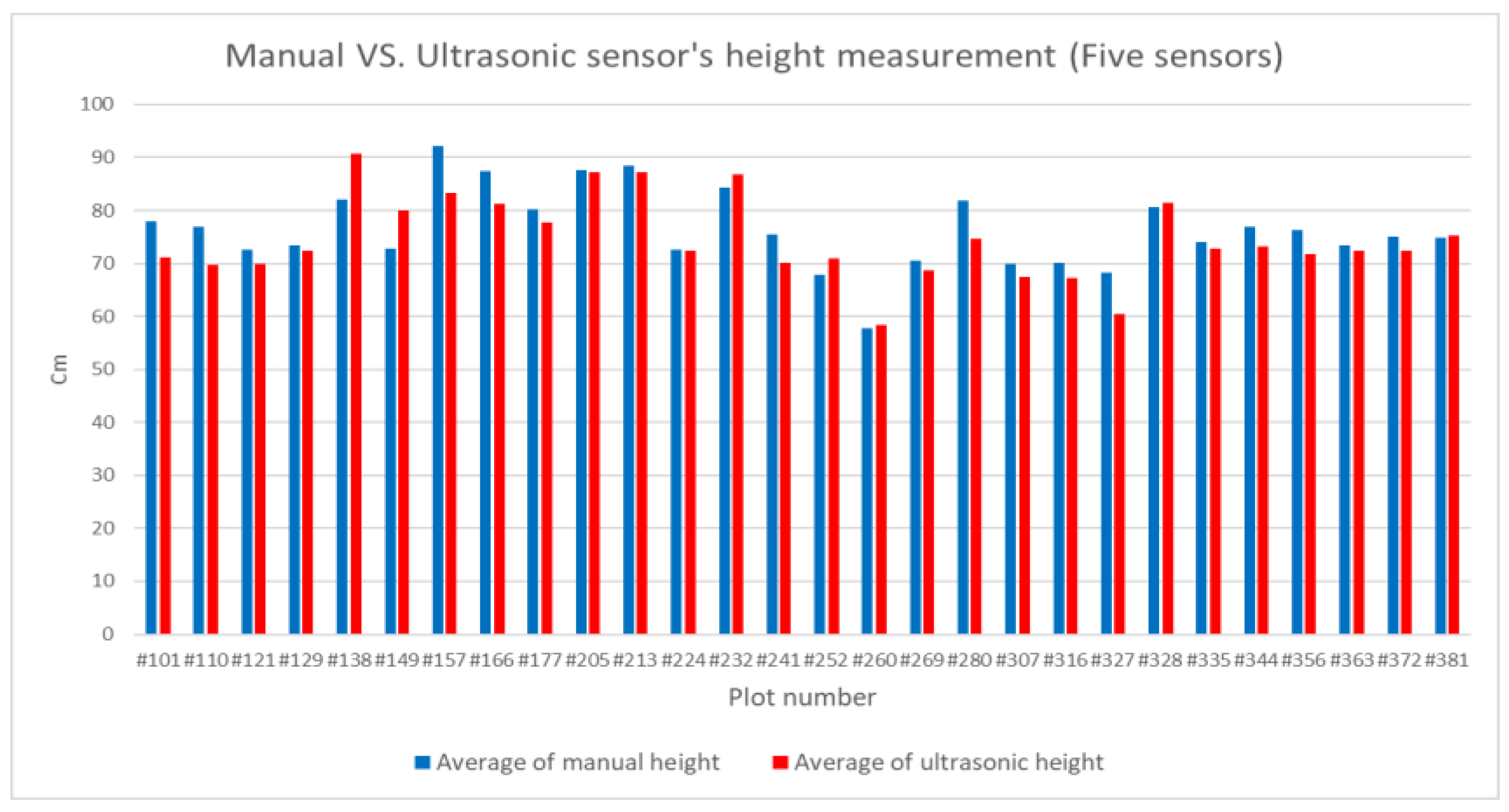
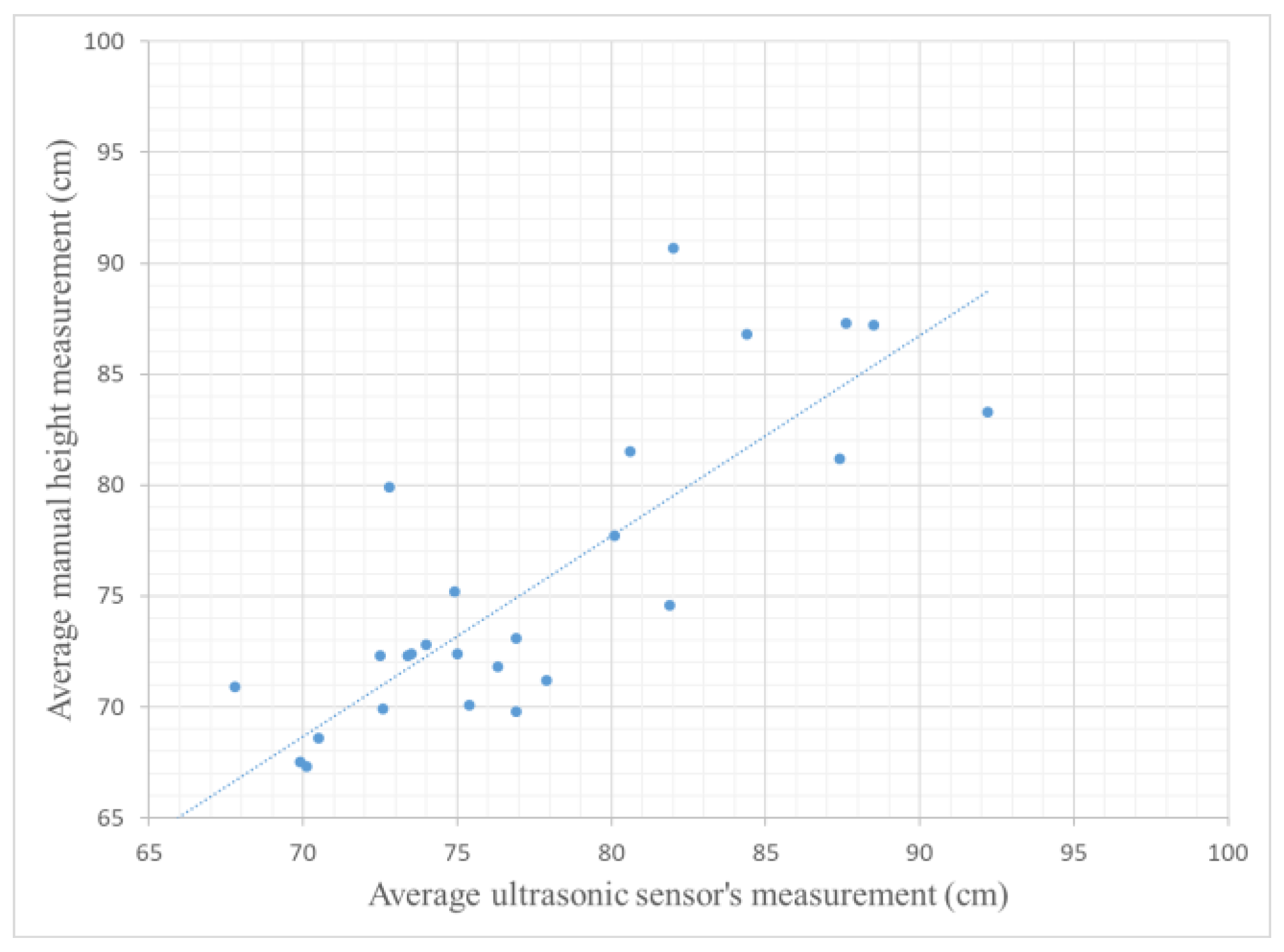
3.4. Accuracy of Crops Height Measurement
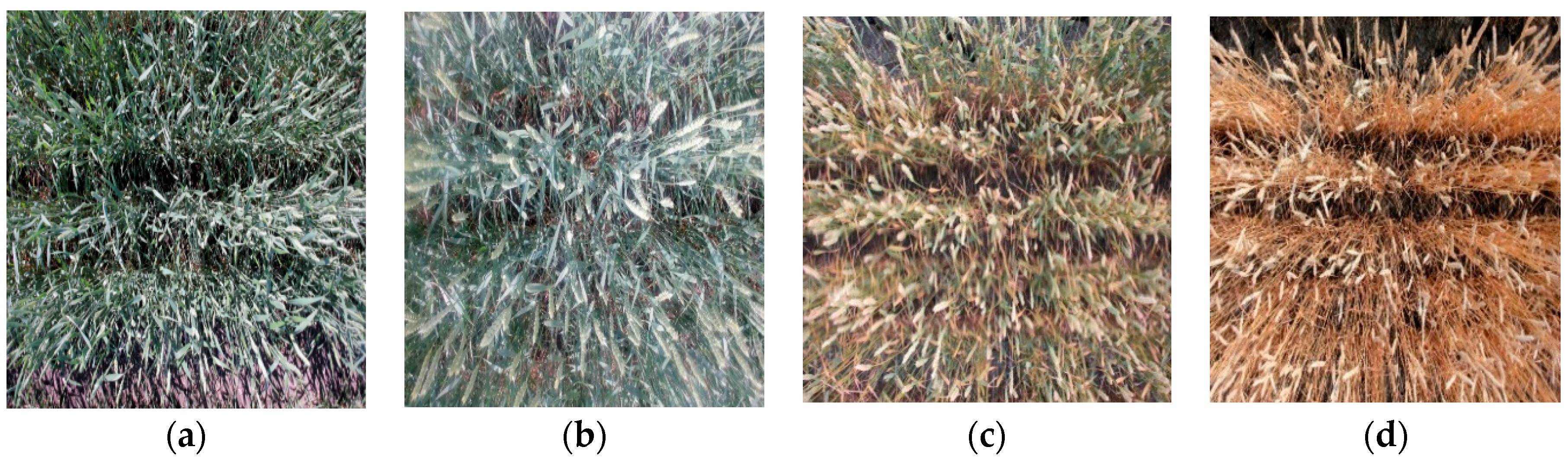
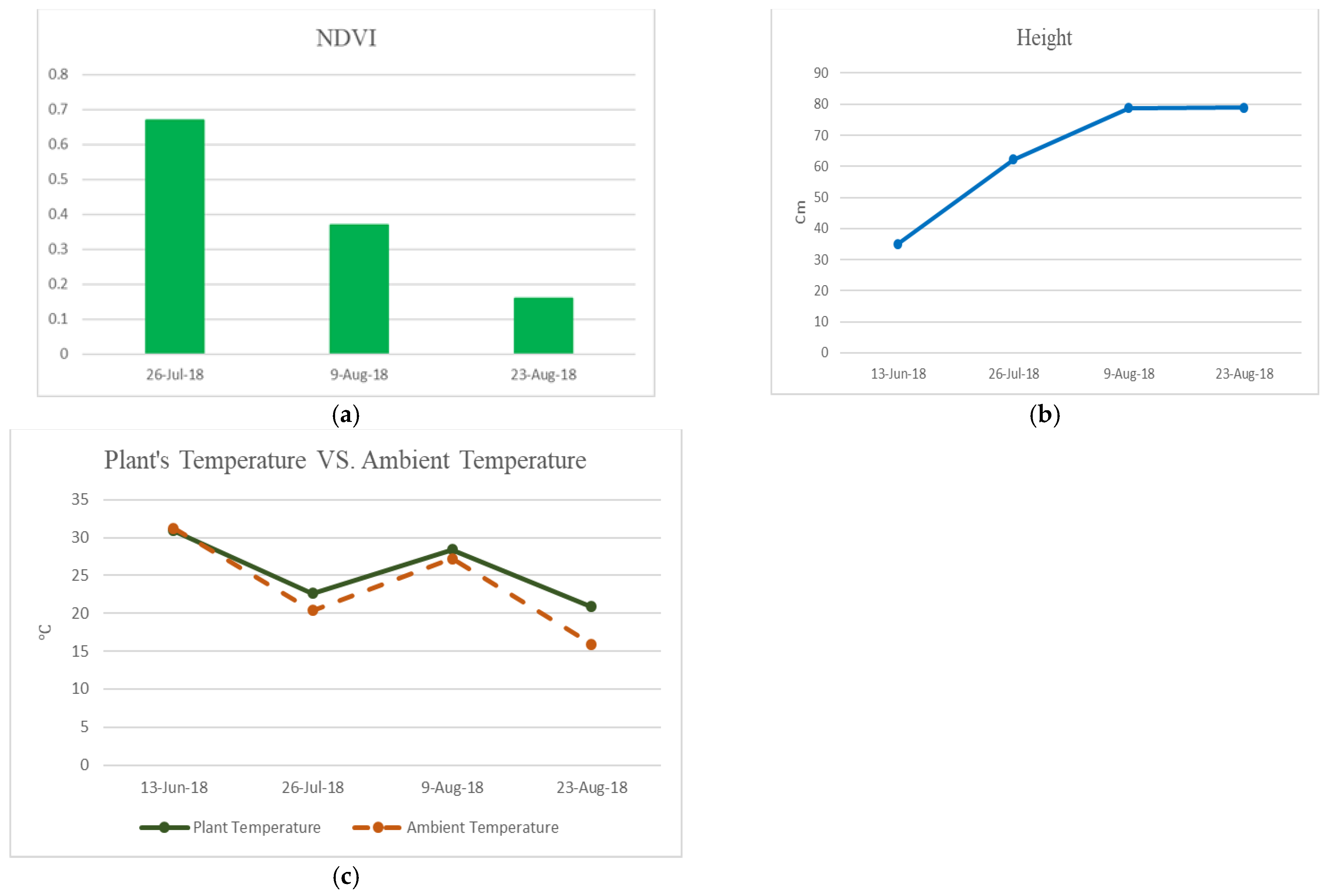
3.5. Analyzing Growth of Wheat Plots
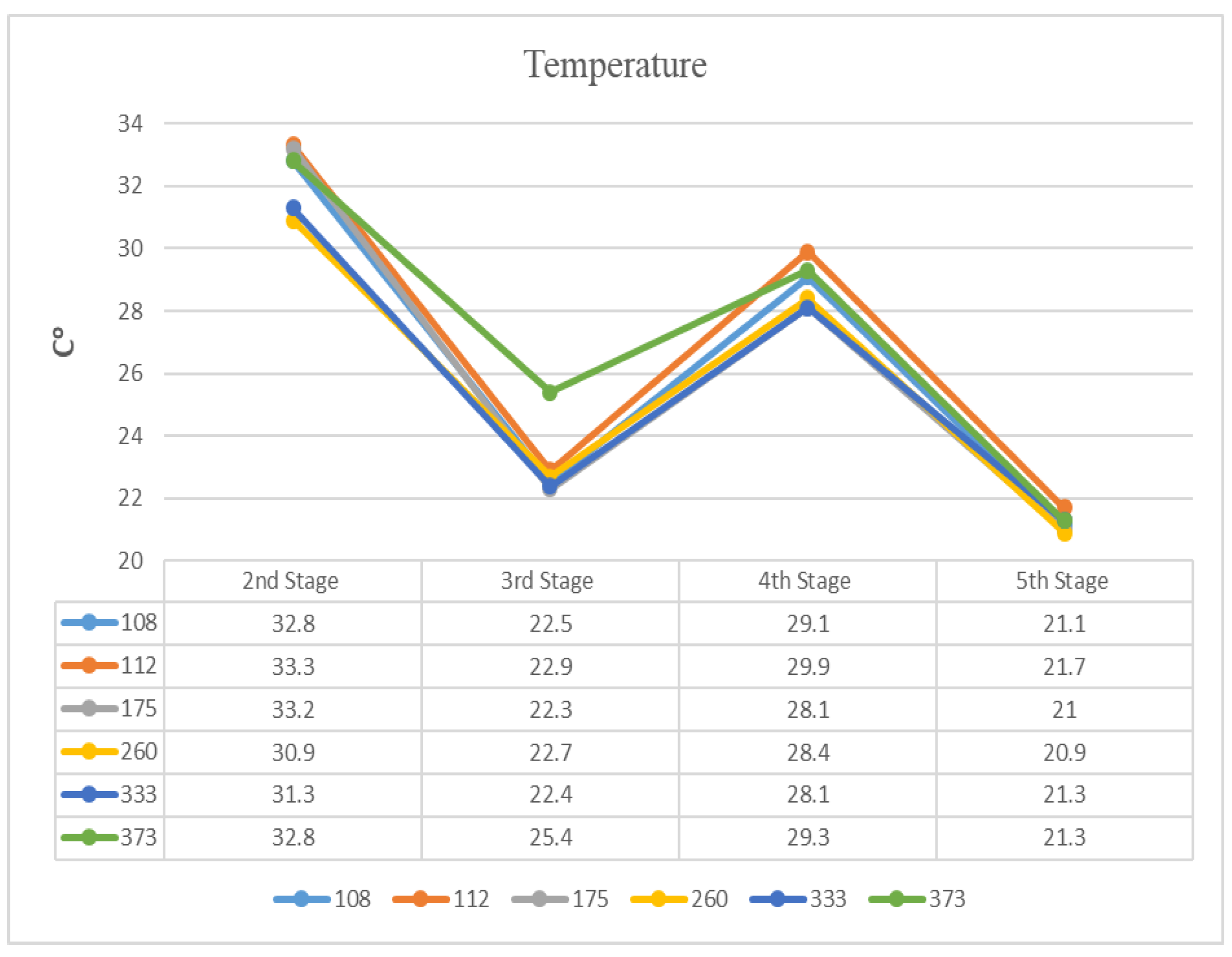
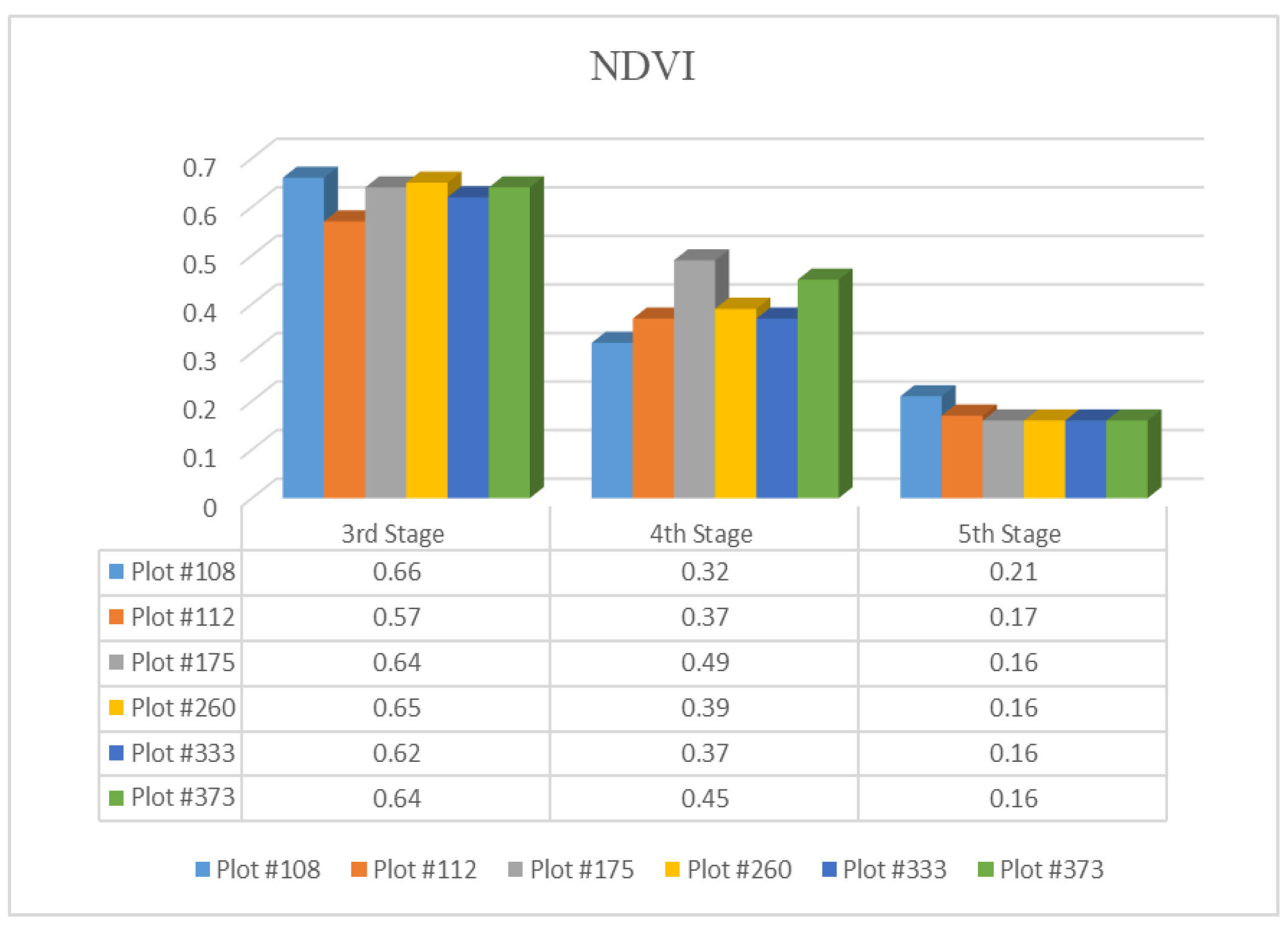
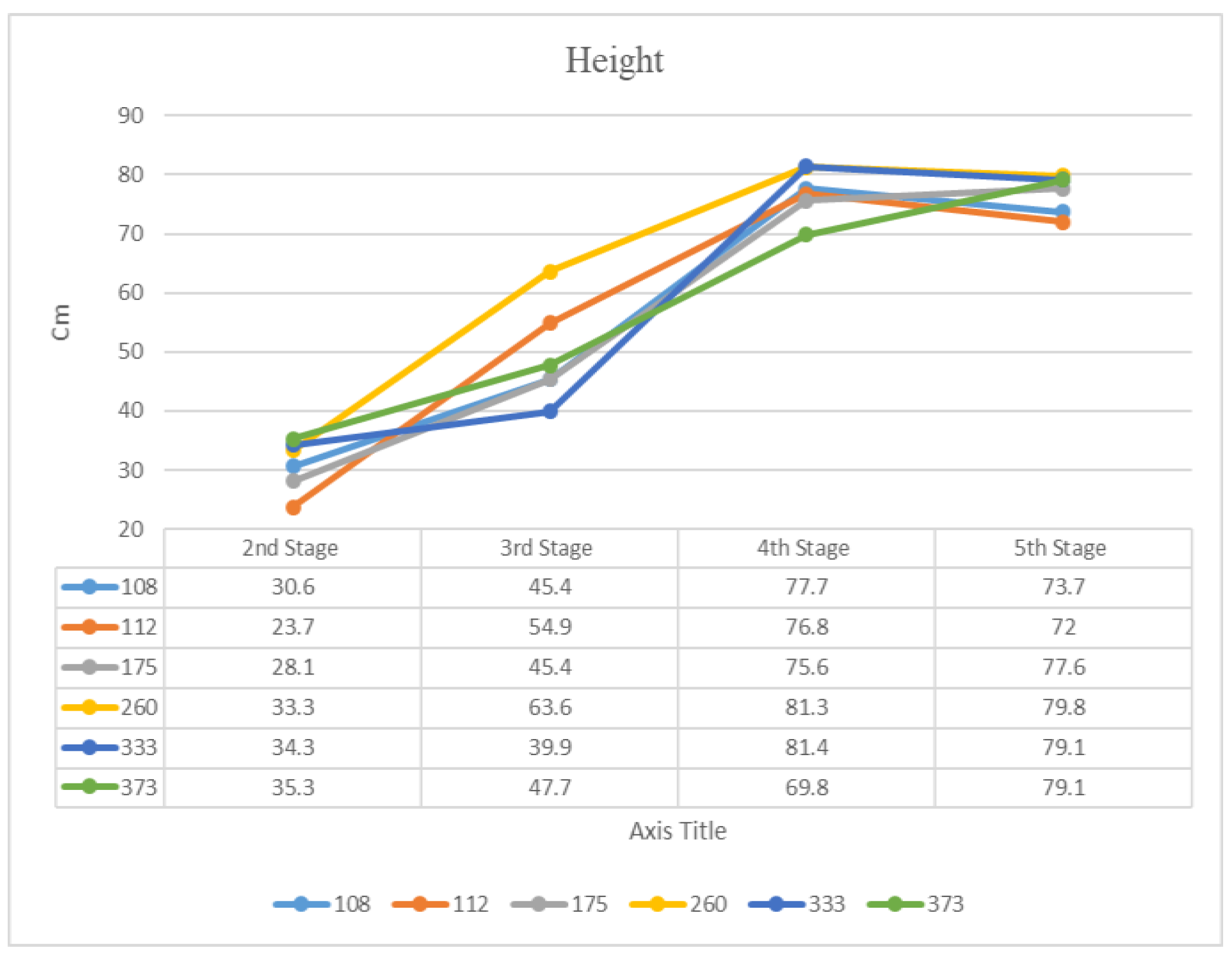
3.6. Comparing Traits of Different Genotypes of Wheat Plots
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- State of Food Security and Nutrition in the World 2019, Safeguarding against Economic Slowdowns and Downturns. Available online: https://www.unicef.org/media/55921/file/SOFI-2019-full-report.pdf (accessed on 12 April 2021).
- FAO. How to Feed the World in 2050, Insights from an Expert Meet; FAO: Quebec City, QC, Canada, 2009; Available online: http://www.fao.org/wsfs/forum2050/wsfs-forum/en/ (accessed on 12 April 2021).
- Furbank, R.T.; Tester, M. Phenomics—Technologies to relieve the phenotyping bottleneck. Trends Plant Sci. 2011, 16, 635–644. [Google Scholar] [CrossRef] [PubMed]
- Cobb, J.N.; Declerck, G.; Greenberg, A.; Clark, R.; McCouch, S. Next-generation phenotyping: Requirements and strategies for enhancing our understanding of genotype–phenotype relationships and its relevance to crop improvement. Theor. Appl. Genet. 2013, 126, 867–887. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tisné, S.; Serrand, Y.; Bach, L.; Gilbault, E.; Ben Ameur, R.; Balasse, H.; Voisin, R.; Bouchez, D.; Durand-Tardif, M.; Guerche, P.; et al. Phenoscope: An automated large-scale phenotyping platform offering high spatial homogeneity. Plant J. 2013, 74, 534–544. [Google Scholar] [CrossRef] [PubMed]
- Montes, J.; Technow, F.; Dhillon, B.; Mauch, F.; Melchinger, A. High-throughput non-destructive biomass determination during early plant development in maize under field conditions. Field Crop. Res. 2011, 121, 268–273. [Google Scholar] [CrossRef]
- Fernandez, M.G.S.; Bao, Y.; Tang, L.; Schnable, P.S. A High-Throughput, Field-Based Phenotyping Technology for Tall Biomass Crops. Plant Physiol. 2017, 174, 2008–2022. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rischbeck, P.; Elsayed, S.; Mistele, B.; Barmeier, G.; Heil, K.; Schmidhalter, U. Data fusion of spectral, thermal and canopy height parameters for improved yield prediction of drought stressed spring barley. Eur. J. Agron. 2016, 78, 44–59. [Google Scholar] [CrossRef]
- Barker, J.; Zhang, N.; Sharon, J.; Steeves, R.; Wang, X.; Wei, Y.; Poland, J. Development of a field-based high-throughput mobile phenotyping platform. Comput. Electron. Agric. 2016, 122, 74–85. [Google Scholar] [CrossRef] [Green Version]
- Bai, G.; Ge, Y.; Hussain, W.; Baenziger, P.S.; Graef, G. A multi-sensor system for high throughput field phenotyping in soybean and wheat breeding. Comput. Electron. Agric. 2016, 128, 181–192. [Google Scholar] [CrossRef] [Green Version]
- Bayati, M.; Fotouhi, R. A Mobile Robotic Platform for Crop Monitoring. Adv. Robot. Autom. 2018, 7, 186. [Google Scholar] [CrossRef]
- Crippen, R. Calculating the vegetation index faster. Remote. Sens. Environ. 1990, 34, 71–73. [Google Scholar] [CrossRef]
- Carballido, J.; Perez-Ruiz, M.; Emmi, L.; Agüera, J. Comparison of positional accuracy between rtk and rtx gnss based on the autonomous agricultural vehicles under field conditions. Appl. Eng. Agric. 2014, 30, 361–366. [Google Scholar]
- Bayati, M. Development of a Field-Based Platform for Plant Phenotyping. Master’s Thesis, University of Saskatchewan, Saskatoon, SK, Canada, 2017. [Google Scholar]
- Blogspot. Using Automator to get the absolute path of the selected file or folder in Finder in OS X 10.8.4. Available online: http://notinthemanual.blogspot.com/2008/07/convert-nmea-latitude-longitude-to.html (accessed on 18 May 2020).
- Calculator Soup. Decimal Degrees to Degrees Minutes Seconds. Available online: https://www.calculatorsoup.com/calculators/conversions/convert-decimal-degrees-to-degrees-minutes-seconds.php (accessed on 18 May 2020).
- Anisya; Swara, G.Y. Implementation of Haversine Formula and Best First Search Method in Searching of Tsunami Evacuation Route. Proc. IOP Conf. Ser. Earth Environ. Sci. 2017, 97, 012004. [Google Scholar] [CrossRef]
- Gogtay, N.J.; Thatte, U.M. Principles of Correlation Analysis. J. Assoc. Phys. India 2017, 65, 78–81. [Google Scholar]
- Smarandache, F. Alternatives to Pearson’s and Spearman’s Correlation Coefficients. SSRN Electron. J. 2016, 3 (Suppl. S09), 47–53. [Google Scholar] [CrossRef] [Green Version]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Type | Response Time (s) | Output Signal | Beam Angle | The Projected Area (m2) | |
|---|---|---|---|---|---|
| Sensor to Canopy Range 0.8 (m) | Sensor to Canopy Range 1.3 (m) | ||||
| Ultrasonic Senor | 0.25 | Analog (4–20 mA) | = 8° | 0.11 | 0.18 |
| Infra-Red Thermometer | 0.60 | 20 µv per °C | = 28° | 0.39 | 0.64 |
| Crop Circle | 0.05 | Digital (string) | = 30° = 14° | 0.021 1 | 0.056 |
| No. | Resolution | Format | Size of Each Picture (Average) | Number of Captured Images | Size of Captured Images | Required Time for Saving Images on the Hard Drive |
|---|---|---|---|---|---|---|
| Test 1 | 1920 × 1080 | .png | 4 MB | 1658 | 6.55 GB | 16:00 |
| Test 2 | 1920 × 1080 | .jpg | 600 KB | 1656 | 885 MB | 1:30 |
| Test 3 | 1280 × 720 | .png | 2.2 MB | 1640 | 3.13 GB | 6:00 |
| No. | Mode of Image Acquisition Program | Format | Number of Captured Images |
|---|---|---|---|
| Test 1 | With auto-pause feature | .png | 1900 |
| Test 2 | Without auto-pause feature | .png | 2400 |
| Date | − | − | |||||
|---|---|---|---|---|---|---|---|
| 13 July 2018 | 52.15852155 −106.52383133 | 52.15852126 −106.52386801 | 3.50 | 2.50 | 2.50 | 0.00 | 0.0% |
| 13 July 2018 | 52.15862831 −106.52383374 | 52.15862686 −106.52395788 | 12.00 | 8.58 | 8.47 | 0.11 | 1.3% |
| 13 July 2018 | 52.15882397 −106.52377929 | 52.15882307 −106.52424218 | 44.50 | 31.82 | 31.58 | 0.24 | 0.76% |
| 26 July 2018 | 52.15887304 −106.5240459 | 52.15887342 −106.52415305 | 10.25 | 7.33 | 7.31 | 0.02 | 0.27% |
| 26 July 2018 | 52.15862818 −106.52378024 | 52.15862758 −106.52424228 | 43.75 | 31.28 | 31.52 | −0.24 | 0.76% |
| 26 July 2018 | 52.15852801 −106.52375944 | 52.15852804 −106.52382901 | 6.50 | 4.65 | 4.75 | −0.10 | 2.1% |
| 9 August 2018 | 52.15887256 −106.52378121 | 52.15887294 −106.52390315 | 11.50 | 8.22 | 8.32 | −0.10 | 1.2% |
| 9 August 2018 | 52.15872534 −106.52377851 | 52.15872504 −106.52408141 | 28.50 | 20.38 | 20.66 | −0.28 | 1.4% |
| 9 August 2018 | 52.15847832 −106.52379675 | 52.15847827 −106.52383171 | 3.25 | 2.32 | 2.38 | −0.06 | 2.6% |
| 23 August 2018 | 52.15857626 −106.52379588 | 52.15857759 −106.52397491 | 17.25 | 12.33 | 12.34 | −0.01 | 0.08% |
| 23 August 2018 | 52.15867586 −106.52393973 | 52.158677611 −106.52386733 | 7.00 | 5.01 | 4.94 | 0.06 | 1.2% |
| 23 August 2018 | 52.15887199 −106.5238358 | 52.15887221 −106.52424361 | 39.50 | 28.24 | 27.82 | 0.42 | 1.5% |
| R | Plot Number | Manual Temperature Measurement (°C) | Average of Manual Temp (°C) | Average of IRT Temp (°C) | Diff | %Diff | |||
|---|---|---|---|---|---|---|---|---|---|
| Temp 1 | Temp 2 | Temp 3 | Temp 4 | ||||||
| 1 | 131 | 27.5 | 26 | 27.4 | 25.3 | 26.5 | 28.3 | −1.7 | −6% |
| 2 | 134 | 27.4 | 27.2 | 27.7 | 27.4 | 27.4 | 28.8 | −1.3 | −5% |
| 3 | 138 | 27.7 | 27.7 | 27.0 | 26.7 | 27.2 | 28.9 | −1.6 | −6% |
| 4 | 147 | 27.2 | 25.5 | 26.8 | 25.6 | 26.2 | 29.0 | −2.7 | −10% |
| 5 | 150 | 28.2 | 25.8 | 27.2 | 26.5 | 26.9 | 29.0 | −2.0 | −7% |
| 6 | 156 | 26.8 | 27.2 | 26.5 | 25.8 | 26.5 | 29.0 | −2.4 | −9% |
| 7 | 165 | 25.8 | 26 | 25.1 | 25.3 | 25.5 | 28.0 | −2.4 | −9% |
| 8 | 173 | 26.0 | 25.8 | 25.3 | 25.3 | 25.6 | 27.9 | −2.3 | −9% |
| 9 | 176 | 27.0 | 26.8 | 26.7 | 27.0 | 26.8 | 28.8 | −1.9 | −7% |
| 10 | 179 | 27.0 | 26.8 | 27.7 | 27.4 | 27.2 | 30.0 | −2.7 | −9% |
| 11 | 202 | 26.0 | 27.0 | 26.2 | 26.8 | 26.5 | 29.5 | −3.0 | −11% |
| 12 | 212 | 26.2 | 26.3 | 26.5 | 26.0 | 26.2 | 27.4 | −1.1 | −4% |
| 13 | 215 | 26.3 | 26.0 | 26.5 | 26.0 | 26.2 | 28.6 | −2.4 | −9% |
| 14 | 220 | 25.8 | 26.0 | 26.2 | 25.8 | 25.9 | 28.8 | −2.8 | −10% |
| 15 | 224 | 26.0 | 26.3 | 26.8 | 26.0 | 26.2 | 29.2 | −2.9 | −11% |
| 16 | 229 | 25.5 | 25.6 | 25.3 | 27.0 | 25.8 | 28.6 | −2.7 | −10% |
| 17 | 232 | 24.7 | 25.1 | 24.2 | 24.8 | 24.7 | 27.5 | −2.8 | −11% |
| 18 | 237 | 24.1 | 24.4 | 23.5 | 23.3 | 23.8 | 27.6 | −3.7 | −15% |
| 19 | 246 | 26.5 | 25.0 | 26.6 | 25.3 | 25.8 | 29.2 | −3.3 | −12% |
| 20 | 251 | 25 | 23.5 | 24.4 | 24.8 | 24.4 | 28.3 | −3.8 | −15% |
| 21 | 259 | 27.7 | 26.3 | 27.5 | 26.0 | 26.8 | 28.6 | −1.8 | −6% |
| 22 | 268 | 27.5 | 26.2 | 27.0 | 27.0 | 26.7 | 28.9 | −2.1 | −7% |
| 23 | 271 | 26.5 | 26.2 | 27.0 | 26.5 | 26.5 | 28.7 | −2.1 | −7% |
| 24 | 274 | 27.0 | 27.4 | 27.2 | 27.5 | 27.2 | 29.8 | −2.5 | −9% |
| 25 | 277 | 26.5 | 26.3 | 26.2 | 26.0 | 26.2 | 28.2 | −1.9 | −8% |
| 26 | 304 | 25.7 | 26.5 | 23.5 | 23.0 | 24.6 | 28.2 | −3.5 | −13% |
| 27 | 307 | 25.3 | 25.0 | 23.9 | 24.1 | 24.5 | 27.8 | −3.2 | −12% |
| 28 | 313 | 26.5 | 25.8 | 26.2 | 25.1 | 25.9 | 29.3 | −3.4 | −12% |
| 29 | 320 | 25.8 | 25.0 | 25.5 | 27.0 | 25.8 | 29.0 | −3.1 | −12% |
| 30 | 325 | 25.5 | 25.0 | 25.5 | 25.3 | 25.3 | 28.7 | −3.3 | −12% |
| 31 | 330 | 26.8 | 26.7 | 26.8 | 26.5 | 26.7 | 28.5 | −1.8 | −7% |
| 32 | 333 | 26.0 | 26.2 | 25.8 | 25.8 | 25.9 | 28.1 | −2.1 | −8% |
| 33 | 338 | 26.7 | 26.5 | 26.5 | 26.3 | 26.5 | 29.6 | −3.1 | −11% |
| 34 | 345 | 26.5 | 26.0 | 26.7 | 26.8 | 26.4 | 29.3 | −2.8 | −11% |
| 35 | 352 | 25.6 | 25.5 | 25.1 | 25.8 | 25.5 | 29.0 | −3.5 | −13% |
| 36 | 358 | 26.0 | 25.5 | 25.3 | 25.1 | 25.4 | 28.6 | −3.1 | −12% |
| 37 | 365 | 25.8 | 25.1 | 25.3 | 25.6 | 25.4 | 28.8 | −3.3 | −12% |
| 38 | 373 | 26.2 | 26.8 | 25.8 | 27.5 | 26.5 | 29.3 | −2.7 | −10% |
| 39 | 377 | 27.0 | 25.5 | 25.6 | 25.6 | 25.9 | 28.9 | −2.9 | −11% |
| 40 | 380 | 26.1 | 24.8 | 25.0 | 24.4 | 25.0 | 28.5 | −3.4 | −13% |
| Date | NDVI | Height (cm) | Canopy Temp (°C) | Ambient Temp (°C) | Ambient Humidity (%) |
|---|---|---|---|---|---|
| 13 June 2018 | N/A | 35.1 | 30.9 | 31.2 | 56.2 |
| 26 July 2018 | 0.67 | 62.2 | 22.6 | 20.4 | 48.5 |
| 9 August 2018 | 0.37 | 78.8 | 28.4 | 27.2 | 41.8 |
| 23 August 2018 | 0.16 | 78.9 | 20.9 | 15.9 | 63.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khak Pour, M.; Fotouhi, R.; Hucl, P.; Zhang, Q. Development of a Mobile Platform for Field-Based High-Throughput Wheat Phenotyping. Remote Sens. 2021, 13, 1560. https://doi.org/10.3390/rs13081560
Khak Pour M, Fotouhi R, Hucl P, Zhang Q. Development of a Mobile Platform for Field-Based High-Throughput Wheat Phenotyping. Remote Sensing. 2021; 13(8):1560. https://doi.org/10.3390/rs13081560
Chicago/Turabian StyleKhak Pour, Majid, Reza Fotouhi, Pierre Hucl, and Qianwei Zhang. 2021. "Development of a Mobile Platform for Field-Based High-Throughput Wheat Phenotyping" Remote Sensing 13, no. 8: 1560. https://doi.org/10.3390/rs13081560
APA StyleKhak Pour, M., Fotouhi, R., Hucl, P., & Zhang, Q. (2021). Development of a Mobile Platform for Field-Based High-Throughput Wheat Phenotyping. Remote Sensing, 13(8), 1560. https://doi.org/10.3390/rs13081560