
Deep Learning for SAR Ship Detection: Past, Present and Future



Abstract
:
1. Introduction
2. Related Work
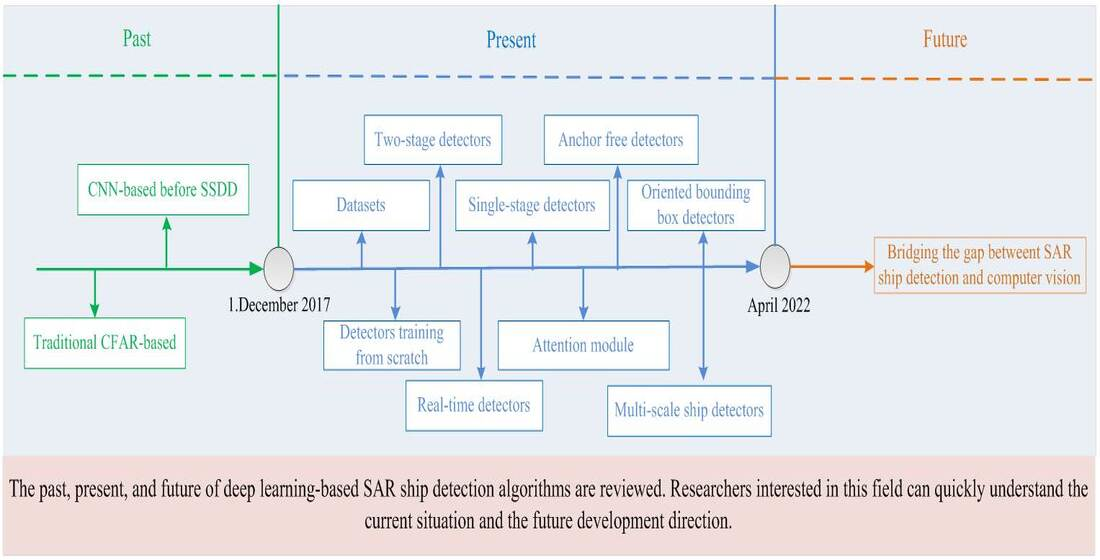
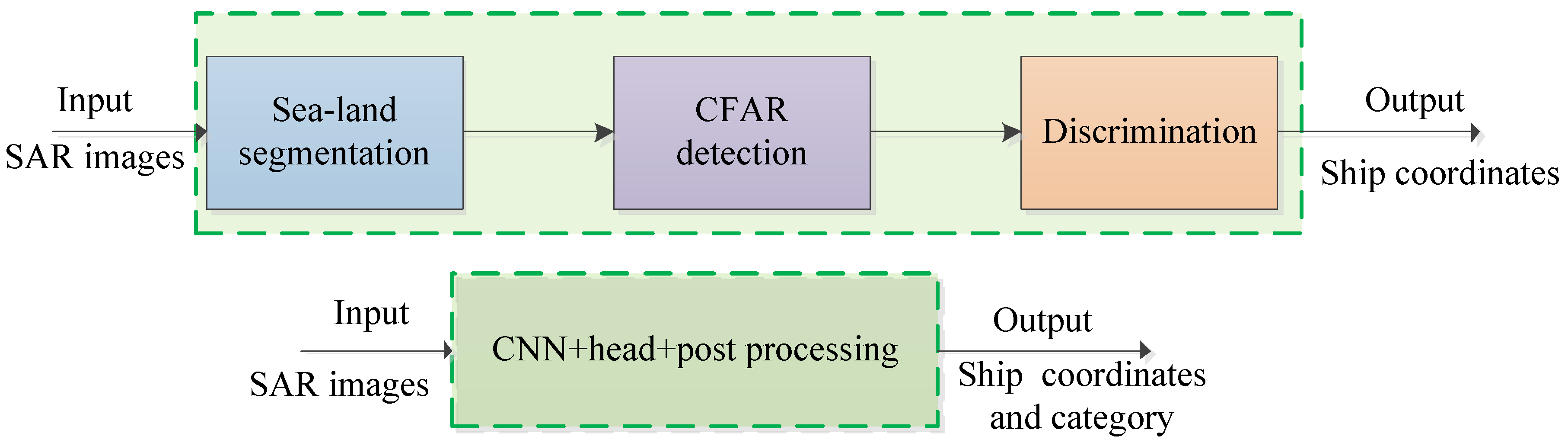
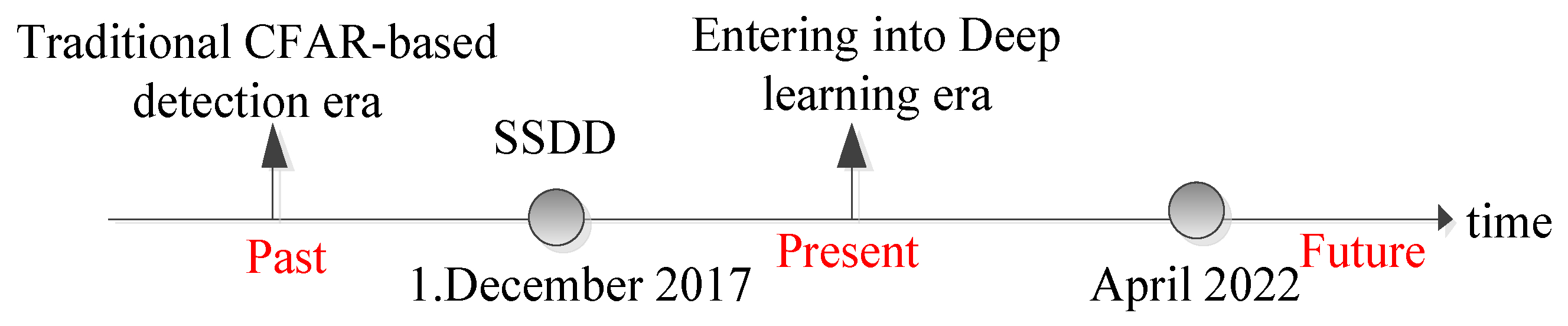
3. Past—The Traditional SAR Ship Detection Algorithms
4. Present—The Deep Learning-Based SAR Detection Algorithms
4.1. The General Overview of the 177 Papers
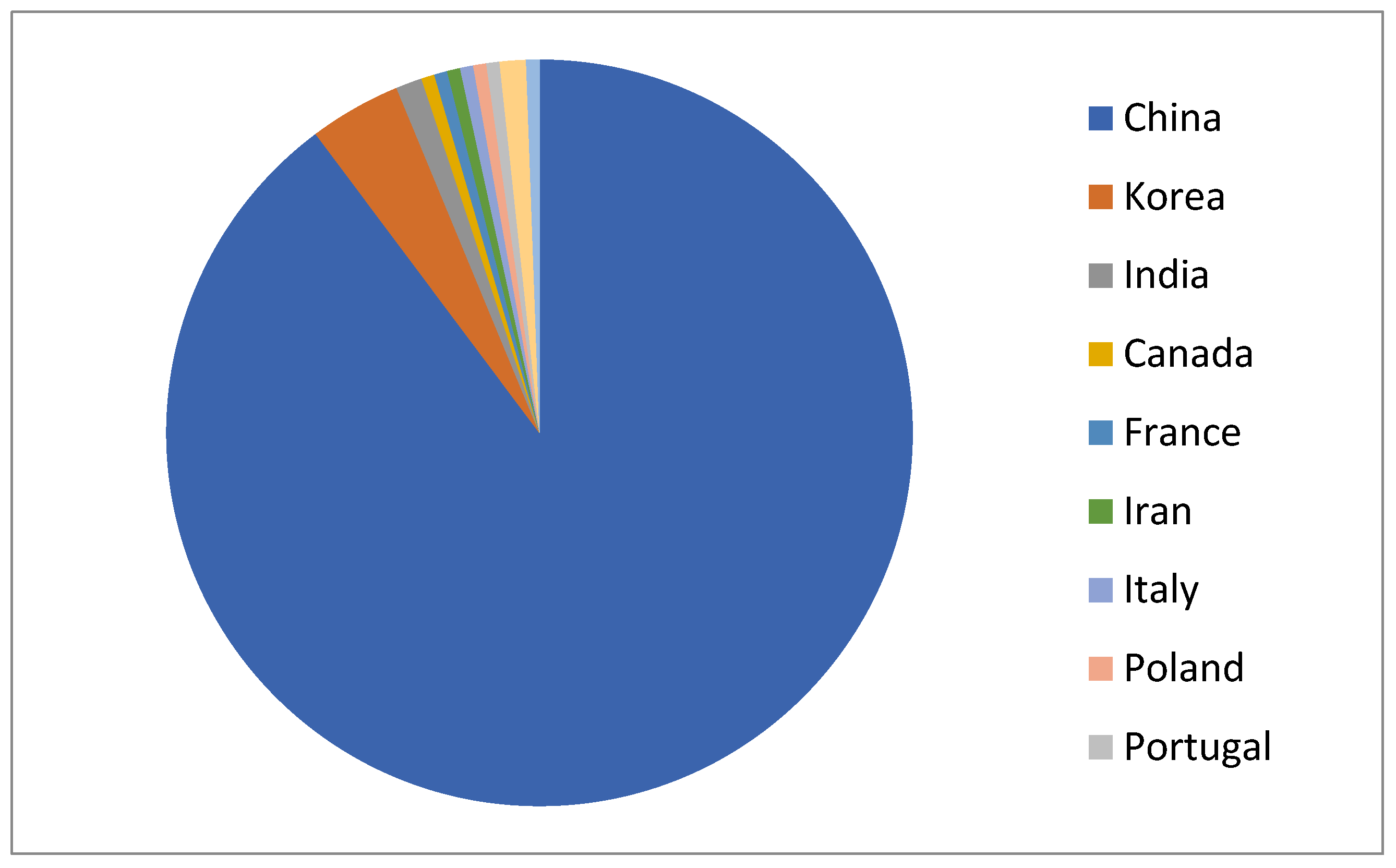
4.1.1. The Countries
4.1.2. Journal or Conference
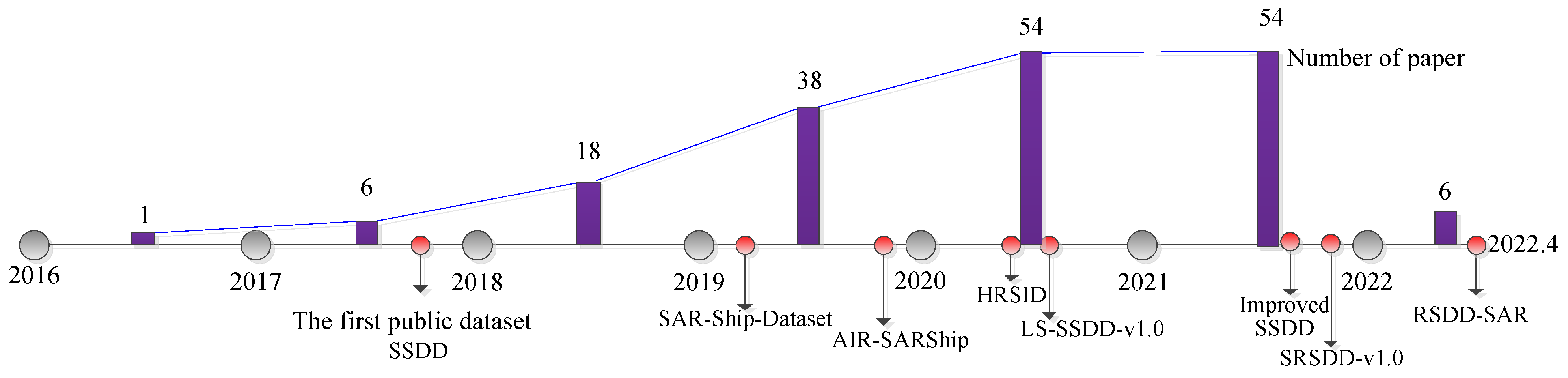
4.1.3. Timeline of the 177 Papers
4.1.4. The Datasets and Satellites That Are Used
4.1.5. Deep Learning Framework
4.1.6. Performance Evolution

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Date | AP | Time | No. | Date | AP | Time |
|---|---|---|---|---|---|---|---|
| 11 | 1 December 2017 | 78.8% | 173 ms | 104 | 14 October 2020 | 92.6% 56.5% | 7.39 ms |
| 15 | 9 March 2019 | 91.3% | 96 ms | 111 | 16 November 2020 | 91.84% | |
| 39 | 2 April 2019 | 89.76% | 10.938 ms | 115 | 2 December 2020 | 89.79% | |
| 40 | 21 May 2019 | 90.16% | 21 ms | 116 | 3 December 2020 | 90.7% | 13.6 ms 74 FPS |
| 43 | 24 July 2017 | 79.78% | 28.4 ms | 117 | 4 December 2020 | 88.33% | 15 FPS |
| 51 | 23 September 2019 | 80.12% | 9.28 ms | 118 | 7 December 2020 | 94.6% | 3.9 ms 258 FPS |
| 54 | 24 October 2019 | 94.13% | 9.03 ms 111 FPS | 121 | 28 December 2020 | 95.1% | 33 ms |
| 55 | 24 October 2019 | 90.04% | 87 ms | 131 | 12 February 2021 | 95.7% 63.4% | |
| 56 | 14 November 2019 | 94.7% | 132 | 17 February 2021 | 93.78% | 202 FPS | |
| 62 | 14 November 2019 | 83.4% | 134 | 27 February 2021 | 80.45% | ||
| 63 | 14 November 2019 | 90.44% | 96.04ms | 149 | 17 March 2021 | 94.41% | 31 FPS |
| 68 | December 2019 | 96.93% | 8.72 ms | 146 | 23 March 2021 | 95.52% | |
| 69 | 2 January 2020 | 97.9% 64.6% | 103 ms | 148 | 31 March 2021 | 92.09% | |
| 74 | 19 March 2020 | 96.4% 67.4% | 106.4 ms | 151 | 13 May 2021 | 88.08% | 12.25 ms |
| 78 | 30 March 2020 | 94.2% 59.5% | 0.93 M | 154 | 9 June 2021 | 98.4% | |
| 81 | 3 April 2020 | 94% | 157 | 30 June 2021 | 61.4% | 45 FPS | |
| 82 | 16 April 2020 | 90.08% 68.1% | 158 | 1 July 2021 | 96.8% 62.7% | 438 ms | |
| 84 | 22 April 2020 | 97.07% | 233 FPS | 160 | 13 July 2021 | 97.2% 61.5% | |
| 90 | 25 May 2020 | 93.96% | 161 | 14 July 2021 | 95.29% | 11 FPS | |
| 93 | 24 June 2020 | 94.72% | 63.2 ms | 170 | 6 December 2021 | 97.8% 64.9% | |
| 96 | 21 July 2020 | 96.08% | 4.51 ms 222 FPS | 171 | 10 December 2021 | 82.2% | 5.2 ms |
| 98 | 21 August 2020 | 81.17% | 24 ms | 173 | 22 December 2021 | 97.4% | 42.5 FPS |
| 99 | 21 August 2020 | 83.4% | 174 | 6 February 2022 | 95.6% 61.1% | ||
| 100 | 31 August 2020 | 90.57% | 17.2 ms | 175 | 25 February 2022 | 97.8 % | 17.5 FPS |
| 102 | 6 October 2020 | 86.3% | 176 | 25 February 2022 | 95.03% | 47 FPS | |
| 103 | 14 October 2020 | 95.6% 61.5% | 177 | 19 March 2022 | 97.0% |
| No. | Date | AP | Time |
|---|---|---|---|
| 20 | 29 August 2018 | 84.2% | 40 FPS |
| 41 | 26 June 2019 | 81.36% | |
| 83 | 20 April 2020 | 90.11% | 62.77 ms |
| 124 | 8 January 2021 | 94.46% |
| No. | Date | AP | Time | No. | Date | AP | Time |
|---|---|---|---|---|---|---|---|
| 38 | 29 March 2019 | 89.07% | 138 | 17 February 2021 | 92.4% | ||
| 89 | 20 May 2020 | 94.7% | 18 ms | 157 | 19 May 2021 | 93.46% | 339 FPS |
| 113 | 30 November 2020 | 91.89% | 12.05 FPS | 158 | 8 June 2021 | 95.52% | |
| 114 | 30 November 2020 | 91.07% | 163 | 1 July 2021 | 95.8% | ||
| 123 | 5 January 2021 | 90.25% | 22 ms | 166 | 14 July 2021 | 94.39% | |
| 133 | 17 February 2021 | 93.9% | 178 | 22 December 2021 | 96.1 | 60.4 FPS | |
| 136 | 17 February 2021 | 95.1% | 179 | 6 February 2022 | 95.1 |
| No. | Date | AP | Time | Version |
|---|---|---|---|---|
| 65 | 1 December 2019 | 88.01% | 24 FPS | 1.0 |
| 97 | 13 August 2020 | 86.99% | 1.0 | |
| 130 | 8 February 2021 | 80.9% | 1.0 | |
| 171 | 1 December 2021 | 92.49% | 5.22 ms | 2.0 |
| No. | Date | AP | No. | Date | AP |
|---|---|---|---|---|---|
| 94 | 29 June 2020 | 89.3% 69.4% | 168 | 6 August 2021 | 89.2% 68%% |
| 110 | 10 November 2020 | not given 84.4% | 174 | 14 February 2022 | 91.4% 66.4% |
| 120 | 23 December 2020 | 91.99% 68.5% | 175 | 6 December 2021 | 94.4% 72% |
| 131 | 12 February 2021 | 92.4% 69.5% | 178 | 22 December 2021 | 88.3% |
| 165 | 13 July 2021 | 90.7% 69.4% |
| No. | Date | AP |
|---|---|---|
| 101 | 15 September 2020 | 75.3% |
| 168 | 6 August 2021 | 71.7% |
| 180 | 25 February 2022 | 75.5% |
| No. | Date | AP50 | Time | Datasets |
|---|---|---|---|---|
| 108 | 30 October 2020 | 81.13% | 35.5 ms | SSDD + SAR-Ship-Dataset |
| 125 | 27 January 2021 | 71.4% | 2920 ms | SAR-Ship-Dataset +AIRSAR-Ship-1.0 |
| 167 | 26 July 2021 | 95.1% | HRSID + SSDD + IEEE 2020 Gaofen Challenge |
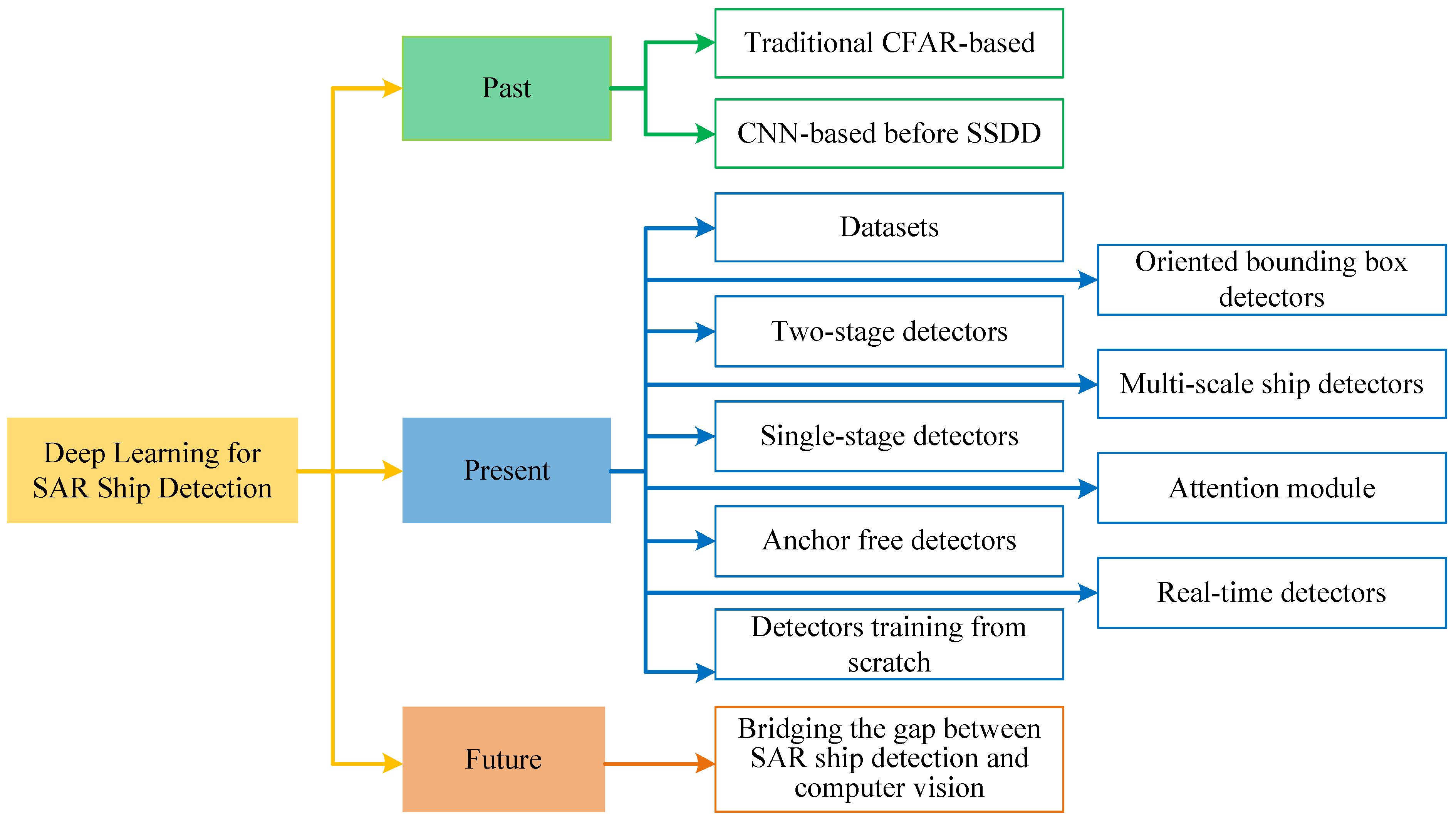
4.2. The Algorithm Taxonomy of the 177 Papers
4.3. The Public Datasets
4.3.1. Overview
4.3.2. SSDD, SSDD+ and Official-SSDD
4.3.3. SAR-Ship-Dataset
4.3.4. AIR-SARShip
4.3.5. HRSID
4.3.6. LS-SSDD-v1.0
4.3.7. SRSDD-v1.0
4.3.8. RSDD-SAR
4.4. Two-Stage Detectors
4.4.1. Backbone Network
4.4.2. RPN
4.4.3. Loss Function
4.4.4. Anchor and NMS
4.4.5. Others
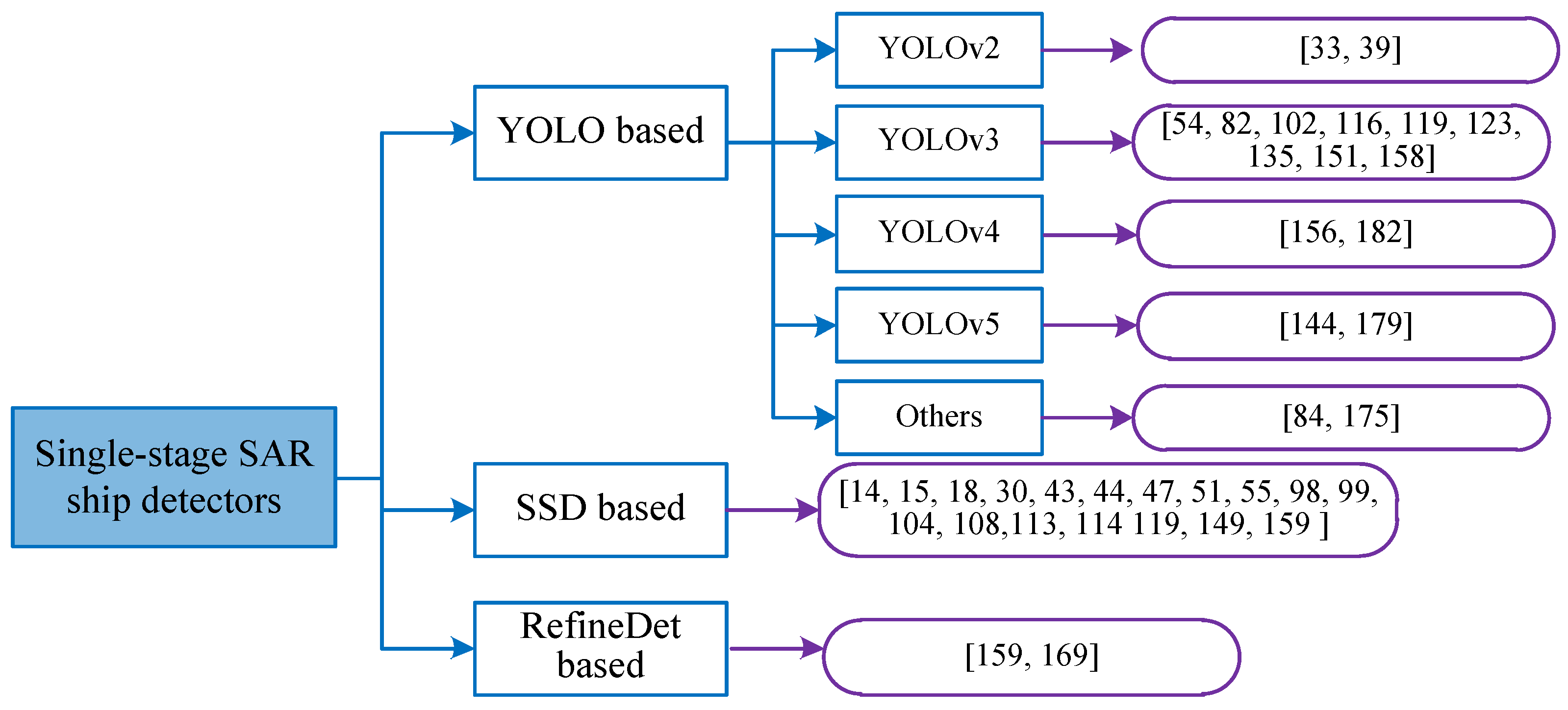
4.5. Single-Stage Detectors
4.5.1. YOLO and SSD Series in Computer Vision
4.5.2. SAR Ship Detection Based on YOLO Series
4.5.3. SAR Ship Detection Based on SSD Series
4.5.4. Others
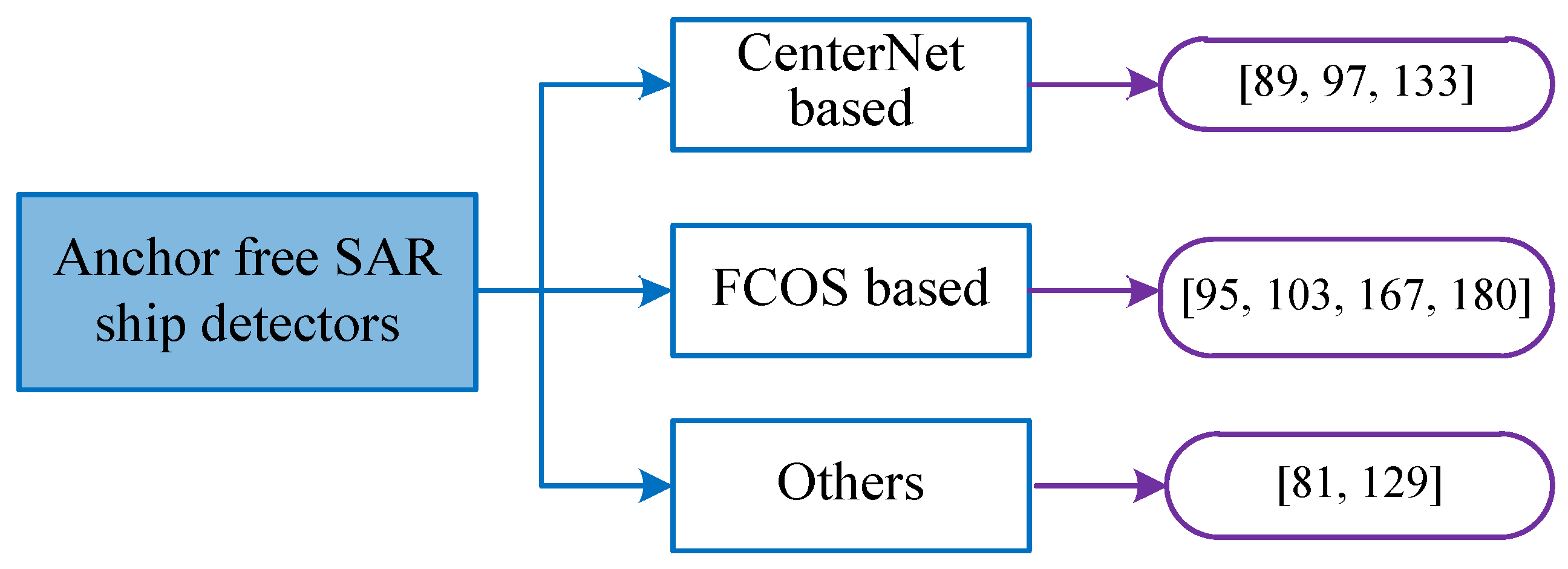
4.6. Anchor Free Detectors
4.6.1. Development of Anchor Free Detection Algorithm in Computer Vision
4.6.2. Development of Anchor-Free SAR Ship Detection Algorithm
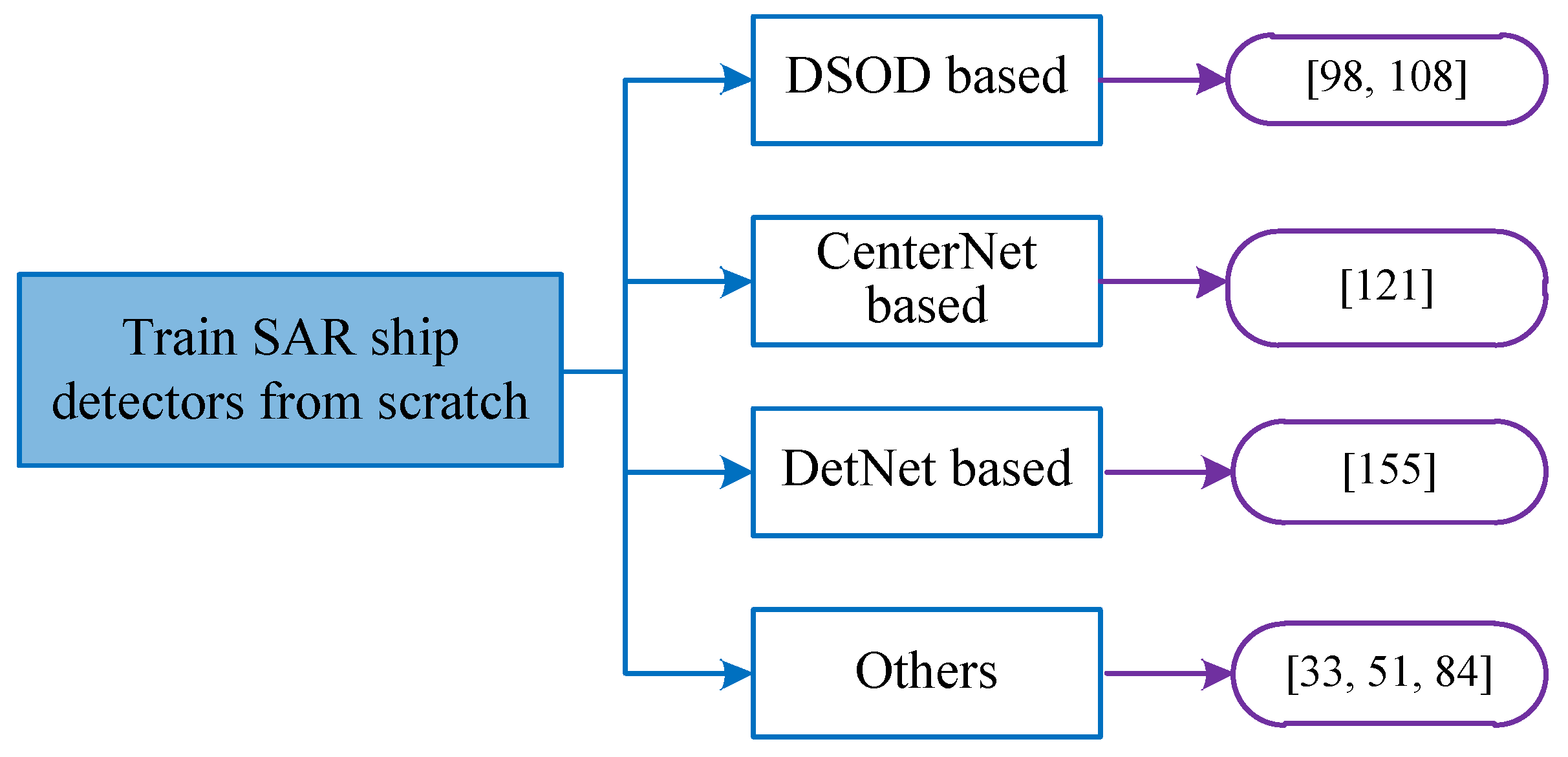
4.7. Detectors Trained from Scratch
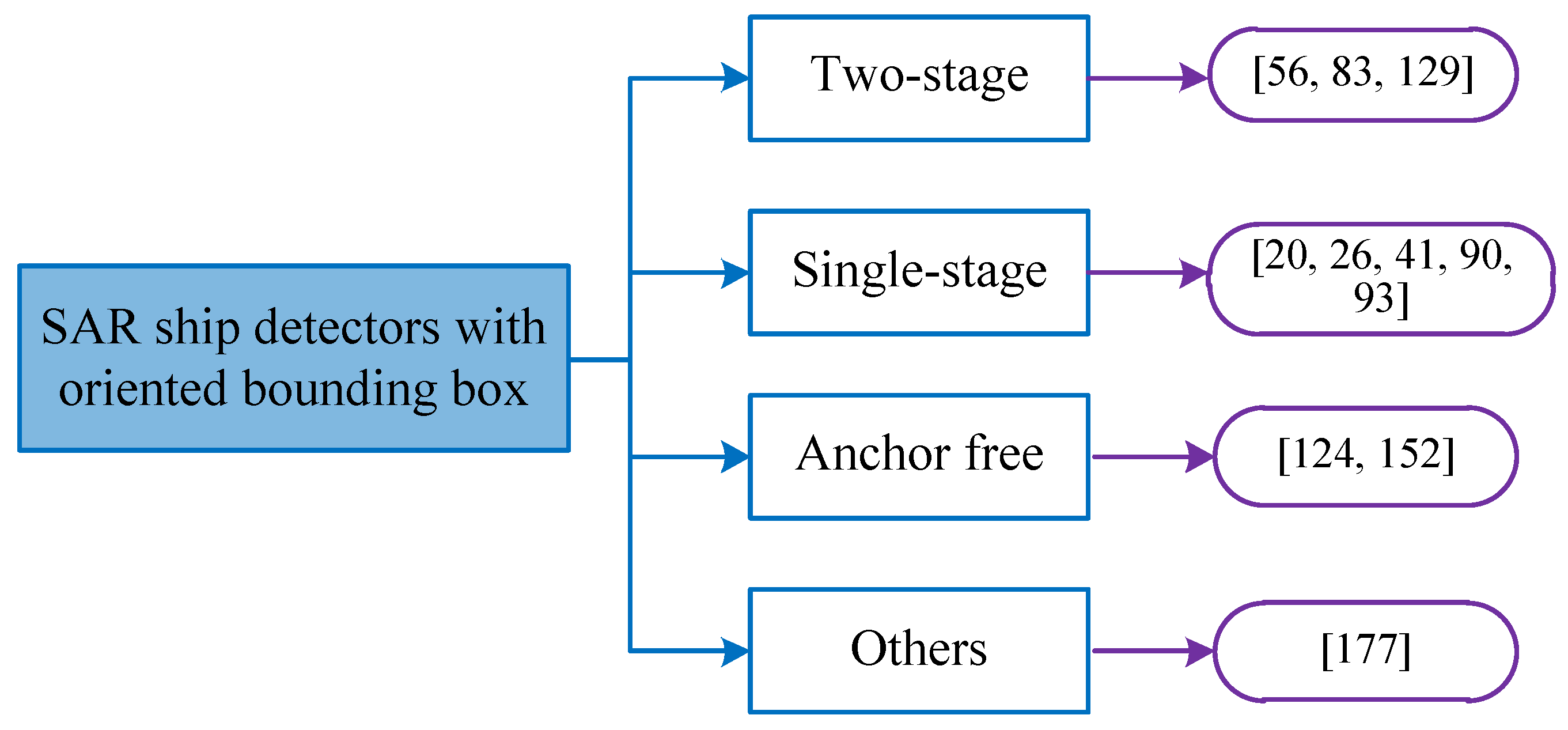
4.8. Detectors with Oriented Bounding Box
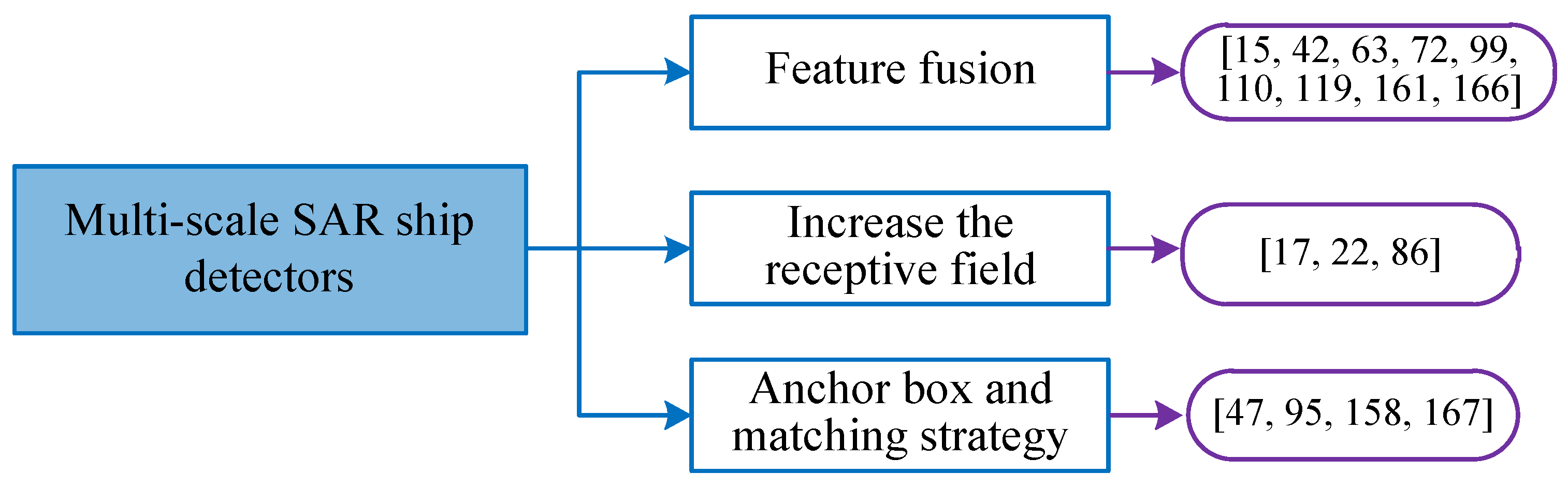
4.9. Multi-Scale Ship Detectors
4.10. Attention Module
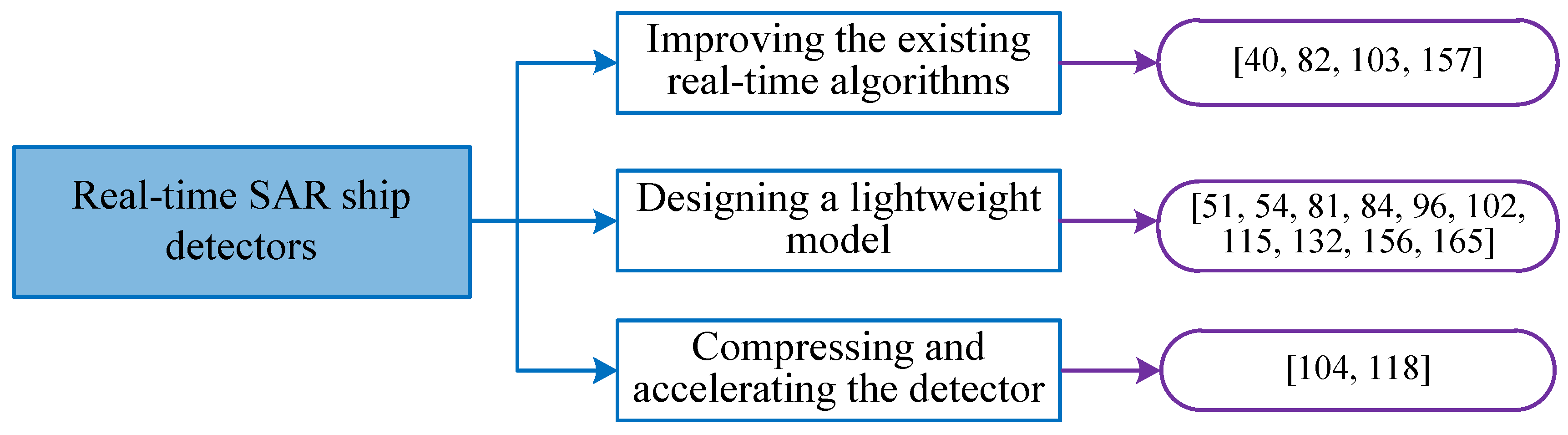
4.11. Real-Time Detectors
4.11.1. Improving the Existing Real-Time Algorithms
4.11.2. Designing a Lightweight Model
4.11.3. Compressing and Accelerating the Detector
4.11.4. Summary
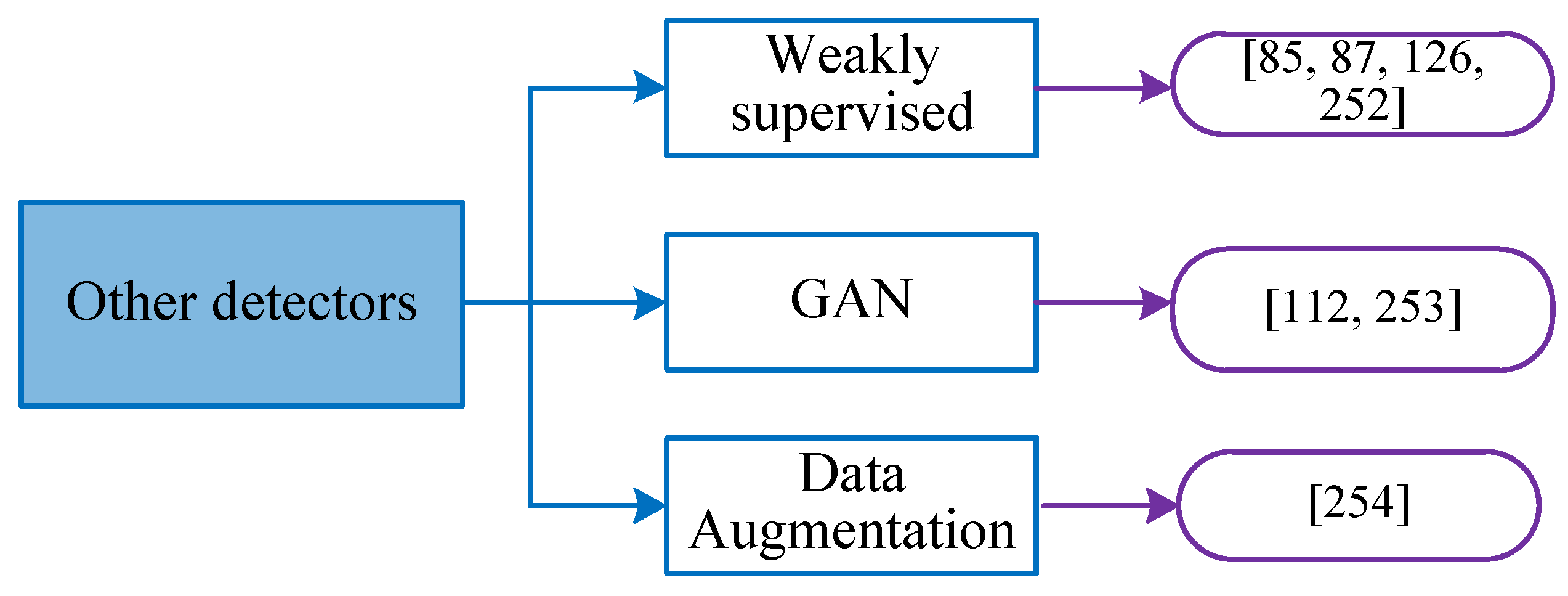
4.12. Other Detectors
4.12.1. Weakly Supervised
4.12.2. GAN
4.12.3. Data Augmentation
4.13. Problems
5. Future—The Direction of the Deep Learning-Based SAR Ship Detectors
5.1. Anchor Free Detector Deserves Special Attention
5.2. Train Detector from Scratch Deserves More Attention
5.3. Many Other Works Need to Be Used for Oriented Bounding Box Detector
5.4. Small Ship Detection Is an Eternal Topic
5.5. Real-Time Detection Is the Key to Application
5.6. Transformer Is the Future Trend
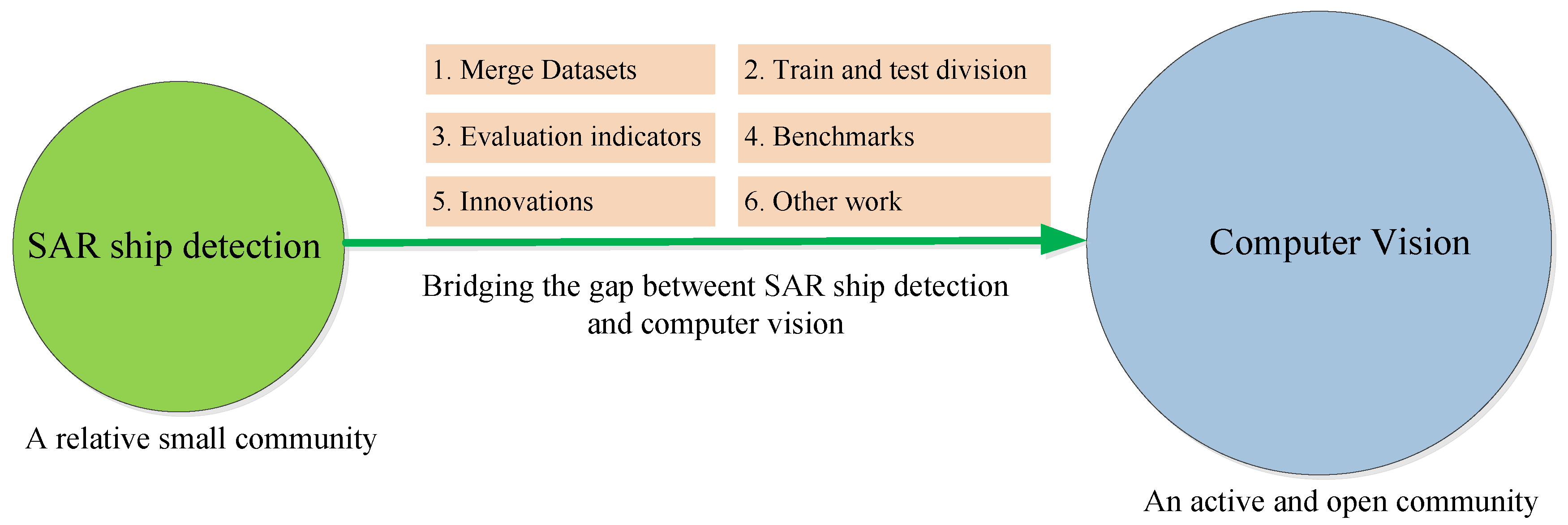
5.7. Bridging the Gap between SAR Ship Detection and Computer Vision
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Reigber, A.; Scheiber, R.; Jager, M.; Prats-Iraola, P.; Hajnsek, I.; Jagdhuber, T.; Papathanassiou, K.P.; Nannini, M.; Aguilera, E.; Baumgartner, S.; et al. Very-high-resolution airborne synthetic aperture radar imaging: Signal processing and applications. Proc. IEEE 2013, 101, 759–783. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Hong, W.; Wu, Y.; Fan, P. An efficient and flexible statistical model based on generalized Gamma distribution for amplitude SAR images. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2711–2722. [Google Scholar] [CrossRef]
- Achim, A.; Kuruoglu, E.E.; Zerubia, J. SAR image filtering based on the heavy-tailed Rayleigh model. IEEE Trans. Image Process. 2006, 15, 2686–2693. [Google Scholar] [CrossRef] [Green Version]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Schwegmann, C.P.; Kleynhans, W.; Salmon, B.P.; Mdakane, L.W.; Meyer, R.G.V. Very deep learning for ship discrimination in Synthetic Aperture Radar imagery. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 104–107. [Google Scholar] [CrossRef]
- Miao, K.; Leng, X.; Zhao, L.; Ji, K. A modified faster R-CNN based on CFAR algorithm for SAR ship detection. In Proceedings of the 2017 International Workshop on Remote Sensing with Intelligent Processing (RSIP), Shanghai, China, 18–21 May 2017. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, M.H.; Xu, P.; Guo, Z. SAR ship detection using sea-land segmentation-based convolutional neural network. In Proceedings of the 2017 International Workshop on Remote Sensing with Intelligent Processing (RSIP), Shanghai, China, 18–21 May 2017. [Google Scholar] [CrossRef]
- Kang, M.; Ji, K.; Leng, X.; Lin, Z. Contextual Region-Based Convolutional Neural Network with Multilayer Fusion for SAR Ship Detection. Remote Sens. 2017, 9, 860. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Chao, W.; Hong, Z. Combining single shot multibox detector with transfer learning for ship detection using Sentinel-1 images. In Proceedings of the 2017 SAR in Big Data Era: Models, Methods and Applications (BIGSARDATA), Singapore, 19–22 November 2017. [Google Scholar]
- Li, J.; Qu, C.; Shao, J. Ship detection in SAR images based on an improved faster R-CNN. In Proceedings of the Sar in Big Data Era: Models, Methods & Applications, Beijing, China, 13–14 November 2017. [Google Scholar] [CrossRef]
- Cozzolino, D.; Martino, G.D.; Poggi, G.; Verdoliva, L. A fully convolutional neural network for low-complexity single-stage ship detection in Sentinel-1 SAR images. In Proceedings of the Geoscience & Remote Sensing Symposium, Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar] [CrossRef]
- An, Q.; Pan, Z.; You, H. Ship Detection in Gaofen-3 SAR Images Based on Sea Clutter Distribution Analysis and Deep Convolutional Neural Network. Sensors 2018, 18, 334. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, C.; Zhang, H.; Zhang, C.; Fu, Q. Combing Single Shot Multibox Detector with transfer learning for ship detection using Chinese Gaofen-3 images. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium-Fall (PIERS-FALL), Singapore, 19–22 November 2017. [Google Scholar] [CrossRef]
- Chen, S.Q.; Zhan, R.H.; Zhang, J. Robust single stage detector based on two-stage regression for SAR ship detection. In Proceedings of the 2nd International Conference on Innovation in Artificial Intelligence, Shanghai China, 9–12 March 2018; pp. 169–174. [Google Scholar] [CrossRef]
- Jiao, J.; Zhang, Y.; Sun, H.; Yang, X.; Gao, X.; Hong, W.; Fu, K.; Sun, X.; Wen, H. A Densely Connected End-to-End Neural Network for Multiscale and Multiscene SAR Ship Detection. IEEE Access 2018, 6, 20881–20892. [Google Scholar] [CrossRef]
- Deng, Z.; Sun, H.; Zhou, S.; Zhao, J.; Lei, L.; Zou, H. Multi-scale object detection in remote sensing imagery with convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2018, 145, 3–22. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.; Zhang, H. Combing a Single Shot Multibox Detector with transfer learning for ship detection using sentinel-1 SAR images. Remote Sens. Lett. 2019, 9, 780–788. [Google Scholar] [CrossRef]
- Wang, R.; Li, J.; Duan, Y.; Cao, H.; Zhao, Y. Study on the Combined Application of CFAR and Deep Learning in Ship Detection. J. Indian Soc. Remote Sens. 2018, 46, 1413–1421. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Lu, C.; Jiang, W. Simultaneous Ship Detection and Orientation Estimation in SAR Images Based on Attention Module and Angle Regression. Sensors 2018, 18, 2851. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Zhang, Z.; Yu, W.; Truong, T. A Cascade Coupled Convolutional Neural Network Guided Visual Attention Method for Ship Detection from SAR Images. IEEE Access 2018, 6, 50693–50708. [Google Scholar] [CrossRef]
- Zhao, J.; Guo, W.; Zhang, Z.; Yu, W. A coupled convolutional neural network for small and densely clustered ship detection in SAR images. Sci. China Inf. Sci. 2019, 62, 42301. [Google Scholar] [CrossRef] [Green Version]
- Khan, H.M.; Cai, Y. Ship detection in SAR Image using YOLOv2. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018. [Google Scholar] [CrossRef]
- Sharifzadeh, F.; Akbarizadeh, G.; Kavian, Y.S. Ship Classification in SAR Images Using a New Hybrid CNN–MLP Classifier. J. Indian Soc. Remote Sens. 2018, 47, 551–562. [Google Scholar] [CrossRef]
- Zhou, F.; Fan, W.; Sheng, Q.; Tao, M. Ship Detection Based on Deep Convolutional Neural Networks for Polsar Images. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar] [CrossRef]
- Lei, L.; Chen, G.; Pan, Z.; Lei, B.; An, Q. Inshore Ship Detection in Sar Images Based on Deep Neural Networks. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar] [CrossRef]
- Wang, Y.; Chao, W.; Hong, Z. Ship Discrimination with Deep Convolutional Neural Networks in Sar Images. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar] [CrossRef]
- Schwegma, N.C.P.; Kleynhans, W.; Salmon, B.P.; Mdakane, L.W.; Meyer, R.G.V. Synthetic Aperture Radar Ship Detection Using Capsule Networks. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar] [CrossRef]
- Lin, Z.; Ji, K.; Leng, X.; Kuang, G. Squeeze and Excitation Rank Faster R-CNN for Ship Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2019, 16, 751–755. [Google Scholar] [CrossRef]
- Ma, M.; Chen, J.; Liu, W.; Yang, W. Ship Classification and Detection Based on CNN Using GF-3 SAR Images. Remote Sens. 2018, 10, 2043. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.W.; Tao, C.S.; Wang, X.S.; Xiao, S.P. Polarimetric SAR Targets Detection and Classification with Deep Convolutional Neural Network. In Proceedings of the 2018 Progress in Electromagnetics Research Symposium (PIERS-Toyama), Toyama, Japan, 1–4 August 2018. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, T.; Zhang, H. Land contained sea area ship detection using spaceborne image. Pattern Recognit. Lett. 2019, 130, 125–131. [Google Scholar] [CrossRef]
- Deng, Z.; Sun, H.; Zhou, S.; Zhao, J. Learning Deep Ship Detector in SAR Images from Scratch. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4021–4039. [Google Scholar] [CrossRef]
- Gui, Y.; Li, X.; Xue, L. A Multilayer Fusion Light-Head Detector for SAR Ship Detection. Sensors 2019, 19, 1124. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. Automatic Ship Detection Based on RetinaNet Using Multi-Resolution Gaofen-3 Imagery. Remote Sens. 2019, 11, 531. [Google Scholar] [CrossRef] [Green Version]
- Liu, N.; Cao, Z.; Cui, Z.; Pi, Y.; Dang, S. Multi-Scale Proposal Generation for Ship Detection in SAR Images. Remote Sens. 2019, 11, 526. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Zheng, T.; Lei, P.; Bai, X. A Hierarchical Convolution Neural Network (CNN)-Based Ship Target Detection Method in Spaceborne SAR Imagery. Remote Sens. 2019, 11, 620. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S.L. A SAR Dataset of Ship Detection for Deep Learning under Complex Backgrounds. Remote Sens. 2019, 11, 765. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.L.; Anagaw, A.; Chang, L.; Wang, Y.C.; Hsiao, C.Y.; Lee, W.H. Ship detection based on YOLOv2 for SAR imagery. Remote Sens. 2019, 11, 786. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Zhang, X. High-Speed Ship Detection in SAR Images Based on a Grid Convolutional Neural Network. Remote Sens. 2019, 11, 1206. [Google Scholar] [CrossRef] [Green Version]
- An, Q.; Pan, Z.; Liu, L.; You, H. DRBox-v2: An Improved Detector with Rotatable Boxes for Target Detection in SAR Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8333–8349. [Google Scholar] [CrossRef]
- Cui, Z.; Li, Q.; Cao, Z.; Liu, N. Dense Attention Pyramid Networks for Multi-Scale Ship Detection in SAR Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8983–8997. [Google Scholar] [CrossRef]
- Chen, C.; Hu, C.; He, C.; Pei, H.; Pang, H.; Zhao, T. SAR ship detection under complex background based on attention mechanism. In Chinese Conference on Image and Graphics Technologies; Springer: Singapore, 2019; pp. 565–578. [Google Scholar]
- Chen, C.; He, C.; Hu, C.; Pei, H.; Jiao, L. A Deep Neural Network Based on an Attention Mechanism for SAR Ship Detection in Multiscale and Complex Scenarios. IEEE Access 2019, 7, 104848–104863. [Google Scholar] [CrossRef]
- Guo, Q.; Wang, H.; Kang, L.; Li, Z.; Xu, F. Aircraft Target Detection from Spaceborne SAR Image. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Gui, Y.; Li, X.; Xue, L.; Lv, J. A scale transfer convolution network for small ship detection in SAR images. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 24–26 May 2019. [Google Scholar] [CrossRef]
- Li, Y.; Chen, J.; Ke, M.; Li, L.; Ding, Z.; Wang, Y. Small targets recognition in SAR ship image based on improved SSD. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019. [Google Scholar] [CrossRef]
- Ai, J.; Tian, R.; Luo, Q.; Jin, J.; Tang, B. Multi-Scale Rotation-Invariant Haar-Like Feature Integrated CNN-Based Ship Detection Algorithm of Multiple-Target Environment in SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10070–10087. [Google Scholar] [CrossRef]
- Fan, Q.; Chen, F.; Cheng, M.; Lou, S.; Xiao, R.; Zhang, B.; Wang, C.; Li, J. Ship Detection Using a Fully Convolutional Network with Compact Polarimetric SAR Images. Remote Sens. 2019, 11, 2171. [Google Scholar] [CrossRef] [Green Version]
- Ayhan, N.; Sen, N. Ship detection in synthetic aperture radar (SAR) images by deep learning. In Proceedings of the Artificial Intelligence and Machine Learning in Defense Applications, Strasbourg, France, 19 September 2019. [Google Scholar]
- Zhang, X.; Wang, H.; Xu, C.; Lv, Y.; Fu, C.; Xiao, H.; He, Y. Lightweight Feature Optimizing Network for Ship Detection in SAR Image. IEEE Access 2019, 7, 141662–141678. [Google Scholar] [CrossRef]
- Yang, T.; Zhu, J.; Liu, J. SAR Image Target Detection and Recognition based on Deep Network. In Proceedings of the 2019 SAR in Big Data Era (BIGSARDATA), Beijing, China, 5–6 August 2019. [Google Scholar] [CrossRef]
- Hong, S.J.; Baek, W.K.; Jung, H.S. Ship Detection from X-Band SAR Images Using M2Det Deep Learning Model. Appl. Sci. 2020, 10, 7751. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Shi, J.; Wei, S. Depthwise Separable Convolution Neural Network for High-Speed SAR Ship Detection. Remote Sens. 2019, 11, 2483. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Zhan, R.; Zhang, J. Regional attention-based single shot detector for SAR ship detection. J. Eng. 2019, 2019, 7381–7384. [Google Scholar] [CrossRef]
- Chen, C.; He, C.; Hu, C.; Pei, H.; Jiao, L. MSARN: A Deep Neural Network Based on an Adaptive Recalibration Mechanism for Multiscale and Arbitrary-oriented SAR Ship Detection. IEEE Access 2019, 7, 159262–159283. [Google Scholar] [CrossRef]
- Yue, B.; Zhao, W.; Han, S. SAR Ship Detection Method Based on Convolutional Neural Network and Multi-layer Feature Fusion. In The International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Wang, Z.; Yang, W.; Chen, J.; Li, C. A Level Set Based Method for Land Masking in Ship Detection Using SAR Images. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Hou, X.; Ao, W.; Xu, F. End-to-end Automatic Ship Detection and Recognition in High-Resolution Gaofen-3 Spaceborne SAR Images. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Wang, R.; Xu, F.; Pei, J.; Wang, C.; Huang, Y.; Yang, J.; Wu, J. An Improved Faster R-CNN Based on MSER Decision Criterion for SAR Image Ship Detection in Harbor. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Li, Y.; Ding, Z.; Zhang, C.; Wang, Y.; Chen, J. SAR Ship Detection Based on Resnet and Transfer Learning. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Li, Q.; Min, R.; Cui, Z.; Pi, Y.; Xu, Z. Multiscale Ship Detection Based on Dense Attention Pyramid Network in Sar Images. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Liu, N.; Cui, Z.; Cao, Z.; Pi, Y.; Lan, H. Scale-Transferrable Pyramid Network for Multi-Scale Ship Detection in Sar Images. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar] [CrossRef]
- Gao, F.; Shi, W.; Wang, J.; Yang, E.; Zhou, H. Enhanced Feature Extraction for Ship Detection from Multi-Resolution and Multi-Scene Synthetic Aperture Radar (SAR) Images. Remote Sens. 2019, 11, 2694. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Wang, Z.; Sun, Y.; Diao, W.; Zhang, Y.; Fu, K. AIR-SARShip-1.0: High-resolution SAR ship detection dataset. J. Radars 2019, 8, 852–862. [Google Scholar]
- Fan, W.; Zhou, F.; Bai, X.; Tao, M.; Tian, T. Ship Detection Using Deep Convolutional Neural Networks for PolSAR Images. Remote Sens. 2019, 11, 2862. [Google Scholar] [CrossRef] [Green Version]
- Dechesne, C.; Lefèvre, S.; Vadaine, R.; Hajduch, G.; Fablet, R. Ship Identification and Characterization in Sentinel-1 SAR Images with Multi-Task Deep Learning. Remote Sens. 2019, 11, 2997. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Zhang, T.; Shi, J.; Wei, S. High-speed and High-accurate SAR ship detection based on a depthwise separable convolution neural network. J. Radars 2019, 8, 841–851. [Google Scholar]
- Wei, S.; Su, H.; Ming, J.; Wang, C.; Yan, M.; Kumar, D.; Shi, J.; Zhang, X. Precise and Robust Ship Detection for High-Resolution SAR Imagery Based on HR-SDNet. Remote Sens. 2020, 12, 167. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Li, Y.; Zhou, H.; Liu, B.; Liu, P. Detection of Small Ship Objects Using Anchor Boxes Cluster and Feature Pyramid Network Model for SAR Imagery. J. Mar. Sci. Eng. 2020, 8, 112. [Google Scholar] [CrossRef] [Green Version]
- Milios, A.; Bereta, K.; Chatzikokolakis, K.; Zissisx, D.; Matwin, S. Automatic fusion of satellite imagery and AIS data for vessel detection. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–5. [Google Scholar]
- Jin, K.; Chen, Y.; Xu, B.; Yin, J.; Yang, J. A Patch-to-Pixel Convolutional Neural Network for Small Ship Detection with PolSAR Images. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6623–6638. [Google Scholar] [CrossRef]
- Hou, X.; Ao, W.; Song, Q.; Lai, J.; Wang, H.; Xu, F. FUSAR-Ship: Building a high-resolution SAR-AIS matchup dataset of Gaofen-3 for ship detection and recognition. Sci. China Inf. Sci. 2020, 63, 140303. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Wei, S.; Liu, S.; Liang, J.; Wang, C.; Shi, J.; Zhang, X. HQ-ISNet: High-Quality Instance Segmentation for Remote Sensing Imagery. Remote Sens. 2020, 12, 989. [Google Scholar] [CrossRef] [Green Version]
- Tanveer, H.; Balz, T.; Mohamdi, B. Using convolutional neural network (CNN) approach for ship detection in Sentinel-1 SAR imagery. In Proceedings of the 2019 6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Xiamen, China, 26–29 November 2019. [Google Scholar] [CrossRef]
- Wang, J.; Chen, J.; Wang, P.; Zhao, C.; Pan, X.; Gao, A. An Algorithm for Azimuth Ambiguities Detection in SAR Images Using Faster-RCNN. In Proceedings of the 2019 6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Xiamen, China, 26–29 November 2019. [Google Scholar] [CrossRef]
- Zheng, T.; Wang, J.; Lei, P. Deep learning based target detection method with multi-features in SAR imagery. In Proceedings of the 2019 6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Xiamen, China, 26–29 November 2019. [Google Scholar] [CrossRef]
- Su, H.; Wei, S.; Wang, M.; Zhou, L.; Shi, J.; Zhang, X. Ship Detection Based on RetinaNet-Plus for High-Resolution SAR Imagery. In Proceedings of the 2019 6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Xiamen, China, 26–29 November 2019. [Google Scholar] [CrossRef]
- Wang, C.; Pei, J.; Wang, R.; Huang, Y.; Yang, J. A new ship detection and classification method of spaceborne SAR images under complex scene. In Proceedings of the 2019 6th Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Xiamen, China, 26–29 November 2019. [Google Scholar] [CrossRef]
- Xiao, Q.; Cheng, Y.; Xiao, M.; Zhang, J.; Shi, H.; Niu, L.; Ge, C.; Lang, H. Improved region convolutional neural network for ship detection in multiresolution synthetic aperture radar images. Concurr. Comput. Pract. Exp. 2020, 32, 5820. [Google Scholar] [CrossRef]
- Mao, Y.; Yang, Y.; Ma, Z.; Li, M.; Su, H.; Zhang, J. Efficient Low-Cost Ship Detection for SAR Imagery Based on Simplified U-Net. IEEE Access 2020, 8, 69742–69753. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Shi, J.; Wei, S. High-Speed Ship Detection in SAR Images by Improved Yolov3. In Proceedings of the 2019 16th International Computer Conference on Wavelet Active Media Technology and Information Processing, Chengdu, China, 14–15 December 2019; pp. 149–152. [Google Scholar] [CrossRef]
- Pan, Z.; Yang, R.; Zhang, A.Z. MSR2N: Multi-Stage Rotational Region Based Network for Arbitrary-Oriented Ship Detection in SAR Images. Sensors 2020, 20, 2340. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Zhang, X. ShipDeNet-20: An Only 20 Convolution Layers and <1-MB Lightweight SAR Ship Detector. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1234–1238. [Google Scholar] [CrossRef]
- Gu, F.; Zhang, H.; Wang, C.; Zhang, B. Weakly supervised ship detection from SAR images based on a three-component CNN-CAM-CRF model. J. Appl. Remote Sens. 2020, 14, 026506. [Google Scholar] [CrossRef]
- Dai, W.; Mao, Y.; Yuan, R.; Liu, Y.; Pu, X.; Li, C. A Novel Detector Based on Convolution Neural Networks for Multiscale SAR Ship Detection in Complex Background. Sensors 2020, 20, 2547. [Google Scholar] [CrossRef]
- Zhou, Y.; Cai, Z.; Zhu, Y.; Yan, J. Automatic ship detection in SAR Image based on Multi-scale Faster R-CNN. J. Phys. Conf. Ser. 2020, 1550, 042006. [Google Scholar] [CrossRef]
- Kang, K.M. Automated Procurement of Training Data for Machine Learning Algorithm on Ship Detection Using AIS Information. Remote Sens. 2020, 12, 1443. [Google Scholar] [CrossRef]
- Cui, Z.; Wang, X.; Liu, N.; Cao, Z.; Yang, J. Ship Detection in Large-Scale SAR Images Via Spatial Shuffle-Group Enhance Attention. IEEE Trans. Geosci. Remote Sens. 2020, 59, 379–391. [Google Scholar] [CrossRef]
- Yang, R.; Wang, G.; Pan, Z.; Lu, H.; Zhang, H.; Jia, X. A Novel False Alarm Suppression Method for CNN-Based SAR Ship Detector. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1401–1405. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, L.; Xiong, B.; Kuang, G. Attention Receptive Pyramid Network for Ship Detection in SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2738–2756. [Google Scholar] [CrossRef]
- Han, L.; Zheng, T.; Ye, W.; Ran, D. Analysis of Detection Preference to CNN Based SAR Ship Detectors. In Proceedings of the 2020 Information Communication Technologies Conference (ICTC), Nanjing, China, 29–31 May 2020. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, J.; Zhan, R. R2FA-Det: Delving into High-Quality Rotatable Boxes for Ship Detection in SAR Images. Remote Sens. 2020, 12, 2031. [Google Scholar] [CrossRef]
- Wei, S.; Zeng, X.; Qu, Q.; Wang, M.; Su, H.; Shi, J. HRSID: A High-Resolution SAR Images Dataset for Ship Detection and Instance Segmentation. IEEE Access 2020, 8, 2031. [Google Scholar] [CrossRef]
- Fu, J.; Sun, X.; Wang, Z.; Fu, K. An Anchor-Free Method Based on Feature Balancing and Refinement Network for Multiscale Ship Detection in SAR Images. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1331–1344. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Shi, J.; Wei, S. HyperLi-Net: A hyper-light deep learning network for high-accurate and high-speed ship detection from synthetic aperture radar imagery. ISPRS J. Photogramm. Remote Sens. 2020, 167, 123–153. [Google Scholar] [CrossRef]
- Zhou, H. Anchor-free Convolutional Network with Dense Attention Feature Aggregation for Ship Detection in SAR Images. Remote Sens. 2020, 12, 2649. [Google Scholar]
- Han, L.; Zhao, X.; Ye, W.; Ran, D. Asymmetric and square convolutional neural network for SAR ship detection from scratch. In Proceedings of the 2020 5th International Conference on Biomedical Signal and Image Processing, Suzhou, China, 21–23 August 2020; pp. 80–85. [Google Scholar]
- Han, L.; Ye, W.; Li, J.; Ran, D. Small ship detection in SAR images based on modified SSD. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019. [Google Scholar] [CrossRef]
- Han, L.; Ran, D.; Ye, W.; Yang, W.; Wu, X. Multi-size Convolution and Learning Deep Network for SAR Ship Detection from Scratch. IEEE Access 2020, 8, 158996–159016. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Ke, X.; Zhan, X.; Shi, J.; Wei, S.; Pan, D.; Li, J.; Su, H.; Zhou, Y. LS-SSDD-v1.0: A Deep Learning Dataset Dedicated to Small Ship Detection from Large-Scale Sentinel-1 SAR Images. Remote Sens. 2020, 12, 2997. [Google Scholar] [CrossRef]
- Zhou, L.; Wei, S.; Cui, Z.; Fang, J.; Yang, X.; Ding, W. Lira-YOLO: A lightweight model for ship detection in radar images. J. Syst. Eng. Electron. 2020, 31, 950–956. [Google Scholar] [CrossRef]
- Mao, Y.; Li, X.; Li, Z.; Li, M.; Chen, S. An Anchor-free SAR Ship Detector with Only 1.17M Parameters. In Proceedings of the ICASIT 2020: 2020 International Conference on Aviation Safety and Information Technology, Weihai, China, 14–16 October 2020. [Google Scholar]
- Mao, Y.; Li, X.; Li, Z.; Li, M.; Chen, S. Network slimming method for SAR ship detection based on knowlegde distillation. In Proceedings of the 2020 International Conference on Aviation Safety and Information Technology, Weihai, China, 14–16 October 2020; pp. 177–181. [Google Scholar]
- Stefanowicz, J.; Ali, I.; Andersson, S. Current trends in ship detection in single polarization synthetic aperture radar imagery. In Proceedings of the Proc. SPIE 11581, Photonics Applications in Astronomy, Communications, Industry, and High Energy Physics Experiments, Wilga, Poland, 14 October 2020; p. 1158109. [Google Scholar]
- Li, K.; Luan, S.; Zhou, D. An Optical-to-SAR Transformation Method for SAR Ship Image Augmentation. In Proceedings of the 2020 IEEE 3rd International Conference on Information Communication and Signal Processing (ICICSP), Shanghai, China, 12–15 September 2020. [Google Scholar] [CrossRef]
- Xu, C.; Yin, C.; Wang, D.; Han, W. Fast ship detection combining visual saliency and a cascade CNN in SAR images. IET Radar Sonar Navig. 2020, 14, 1879–1887. [Google Scholar] [CrossRef]
- Han, L.; Ran, D.; Ye, W.; Wu, X. Asymmetric convolution-based neural network for SAR ship detection from scratch. In Proceedings of the 2020 9th International Conference on Computing and Pattern Recognition, Xiamen China, 30 October–1 November 2020; pp. 90–95. [Google Scholar]
- Idicula, S.M.; Paul, B. Real time SAR Ship Detection using novel SarNeDe method. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 2198–2201. [Google Scholar] [CrossRef]
- Hu, W.; Tian, Z.; Chen, S.; Zhan, R.; Zhang, J. Dense feature pyramid network for ship detection in SAR images. In Proceedings of the Third International Conference on Image, Video Processing and Artificial Intelligence, Shanghai, China, 23–24 October 2020. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Shi, J.; Wei, S.; Wang, J.; Li, J.; Su, H.; Zhou, Y. Balance Scene Learning Mechanism for Offshore and Inshore Ship Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2020, 19, 4004905. [Google Scholar] [CrossRef]
- Zou, L.; Zhang, H.; Wang, C.; Wu, F. MW-ACGAN: Generating Multiscale High-Resolution SAR Images for Ship Detection. Sensors 2020, 20, 6673. [Google Scholar] [CrossRef]
- Zhang, G.; Li, Z.; Li, X.; Yin, C.; Shi, Z. A Novel Salient Feature Fusion Method for Ship Detection in Synthetic Aperture Radar Images. IEEE Access 2020, 8, 215904–215914. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, J.; Xu, Y. SAR Ship Target Detection for SSDv2 under Complex Backgrounds. In Proceedings of the 2020 International Conference on Computer Vision, Image and Deep Learning (CVIDL), Chongqing, China, 10–12 July 2020. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, S.; Wang, W.Q. A Lightweight Faster R-CNN for Ship Detection in SAR Images. IEEE Geosci. Remote Sens. Lett. 2020, 19, 4006105. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, G.; Zhou, H.; Lu, C. Rapid Ship Detection in SAR Images Based on YOLOv3. In Proceedings of the 2020 5th International Conference on Communication, Image and Signal Processing (CCISP), Chengdu, China, 13–15 November 2020. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Shi, J.; Wei, S.; Wang, J.; Li, J. Balanced Feature Pyramid Network for Ship Detection in Synthetic Aperture Radar Images. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020. [Google Scholar] [CrossRef]
- Chen, S.; Zhan, R.; Wang, W.; Zhang, J. Learning Slimming SAR Ship Object Detector Through Network Pruning and Knowledge Distillation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 1267–1282. [Google Scholar] [CrossRef]
- Wang, J.; Lin, Y.; Guo, J.; Zhuang, L. SSS-YOLO: Towards more accurate detection for small ships in SAR image. Remote Sens. Lett. 2021, 12, 93–102. [Google Scholar] [CrossRef]
- Yang, R.; Wang, R.; Deng, Y.; Jia, X.; Zhang, H. Rethinking the Random Cropping Data Augmentation Method Used in the Training of CNN-based SAR Image Ship Detector. Remote Sens. 2020, 13, 34. [Google Scholar] [CrossRef]
- Guo, H.; Yang, X.; Wang, N.; Gao, X. A CenterNet++ model for ship detection in SAR images. Pattern Recognit. 2021, 112, 107787. [Google Scholar] [CrossRef]
- Wang, C.; Su, W.; Gu, H. Two-stage ship detection in synthetic aperture radar images based on attention mechanism and extended pooling. J. Appl. Remote Sens. 2020, 14, 044522. [Google Scholar] [CrossRef]
- Chaudhary, Y.; Mehta, M.; Goel, N.; Bhardwaj, P.; Gupta, D.; Khanna, A. YOLOv3 Remote Sensing SAR Ship Image DetectionM. In Data Analytics and Management; Springer: Singapore, 2021; pp. 519–531. [Google Scholar]
- Yang, R.; Pan, Z.; Jia, X.; Zhang, L.; Deng, Y. A Novel CNN-Based Detector for Ship Detection Based on Rotatable Bounding Box in SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1938–1958. [Google Scholar] [CrossRef]
- Liu, C.; Zhu, W. An improved algorithm for ship detection in SAR images based on CNN. In Proceedings of the Twelfth International Conference on Graphics and Image Processing, Xi’an, China, 13–15 November 2021. [Google Scholar]
- Wang, J.; Wen, Z.; Lu, Y.; Wang, X.; Pan, Q. Weakly Supervised SAR Ship Segmentation Based on Variational Gaussian G (A) (0) Mixture Model A Learning. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020. [Google Scholar]
- Mao, Y.; Li, X.; Su, H.; Zhou, Y.; Li, J. Ship Detection for SAR Imagery Based on Deep Learning: A Benchmark. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020. [Google Scholar] [CrossRef]
- Zhao, K.; Zhou, Y.; Chen, X. A Dense Connection Based SAR Ship Detection network. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020. [Google Scholar] [CrossRef]
- An, Q.; Pan, Z.; You, H.; Hu, Y. Transitive Transfer Learning Based Anchor Free Rotatable Detector for SAR Target Detection With Few Samples. IEEE Access 2021, 9, 24011–24025. [Google Scholar] [CrossRef]
- Zhang, P.; Luo, H.; Ju, M.; He, M.; Chang, Z.; Hui, B. Brain-Inspired Fast Saliency-Based Filtering Algorithm for Ship Detection in High-Resolution SAR Images. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5201709. [Google Scholar] [CrossRef]
- Wang, R.; Shao, S.; An, M.; Li, J.; Wang, S.; Xu, X. Soft Thresholding Attention Network for Adaptive Feature Denoising in SAR Ship Detection. IEEE Access 2021, 9, 29090–29105. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Shi, J.; Wei, S. Shipdenet-18: An Only 1 Mb With Only 18 Convolution Layers Light-Weight Deep Learning Network for Sar Ship Detection. In Proceedings of the IGARSS 2020–2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Wang, X.; Cui, Z.; Cao, Z.; Dang, S. Dense Docked Ship Detection via Spatial Group-Wise Enhance Attention in SAR Images. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Hou, S.; Ma, X.; Wang, X.; Fu, Z.; Wang, J.; Wang, H. SAR Image Ship Detection Based on Scene Interpretation. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Jiang, S.; Zhu, M.; He, Y.; Zheng, Z.; Zhou, F.; Zhou, G. Ship Detection with Sar Based on Yolo. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Zhu, C.; Zhao, D.; Liu, Z.; Mao, Y. Hierarchical Attention for Ship Detection in SAR Images. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Hou, Z.; Cui, Z.; Cao, Z.; Liu, N. An Integrated Method of Ship Detection and Recognition in Sar Images based on Deep Learning. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Wang, X.; Cui, Z.; Cao, Z.; Tian, Y. Ship Detection in Large Scale Sar Images Based on Bias Classification. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Shao, P.; Lu, X.; Huang, P.; Xu, W.; Dong, Y. Impact Analysis of Radio Frequency Interference on SAR Image Ship Detection Based on Deep Learning. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Li, J.; Guo, C.; Gou, S.; Wang, M.; Chen, J. Ship Segmentation on High-Resolution Sar Image by a 3D Dilated Multiscale U-Net. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Ferreira, N.; Silveira, M. Ship Detection in SAR Images Using Convolutional Variational Autoencoders. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar]
- Lee, S.J.; Chang, J.Y.; Lee, K.J.; Oh, K.Y. Data Augmentation for Ship Detection using Kompsat-5 Images and Deep Learning Model. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Song, J.; Kim, D.J. Fine Acquisition of Vessel Training Data for Machine Learning from Sentinel-1 SAR Images Accompanied by AIS Imformation. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar] [CrossRef]
- Tang, G.; Zhuge, Y.; Claramunt, C.; Men, S. N-YOLO: A SAR Ship Detection Using Noise-Classifying and Complete-Target Extraction. Remote Sens. 2021, 13, 871. [Google Scholar] [CrossRef]
- Raj, J.A.; Idicula, S.M.; Paul, B. A novel Ship detection method from SAR image with reduced false alarm. J. Phys. Conf. Ser. 2021, 1817, 012010. [Google Scholar] [CrossRef]
- Jiang, K.; Cao, Y. SAR Image Ship Detection Based on Deep Learning. In Proceedings of the 2020 International Conference on Computer Engineering and Intelligent Control (ICCEIC), Chongqing, China, 6–8 November 2020. [Google Scholar] [CrossRef]
- Li, D.; Liang, Q.; Liu, H.; Liu, Q.; Liu, H.; Liao, G. A Novel Multidimensional Domain Deep Learning Network for SAR Ship Detection. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5203213. [Google Scholar] [CrossRef]
- Geng, X.; Shi, L.; Yang, J.; Li, P.; Zhao, L.; Sun, W.; Zhao, J. Ship Detection and Feature Visualization Analysis Based on Lightweight CNN in VH and VV Polarization Images. Remote Sens. 2021, 13, 1184. [Google Scholar] [CrossRef]
- Jin, L.; Liu, G. An Approach on Image Processing of Deep Learning Based on Improved SSD. Symmetry 2021, 13, 495. [Google Scholar] [CrossRef]
- Ren, Y.; Li, X.; Xu, H. A Deep Learning Model to Extract Ship Size from Sentinel-1 SAR Images. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5203414. [Google Scholar] [CrossRef]
- Chen, Y.; Duan, T.; Wang, C.; Zhang, Y.; Huang, M. End-to-End Ship Detection in SAR Images for Complex Scenes Based on Deep CNNs. J. Sens. 2021, 2021, 8893182. [Google Scholar] [CrossRef]
- He, Y.; Gao, F.; Wang, J.; Hussain, A.; Yang, E.; Zhou, H. Learning Polar Encodings for Arbitrary-Oriented Ship Detection in SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3846–3859. [Google Scholar] [CrossRef]
- Tian, L.; Cao, Y.; He, B.; Zhang, Y.; He, C.; Li, D. Image Enhancement Driven by Object Characteristics and Dense Feature Reuse Network for Ship Target Detection in Remote Sensing Imagery. Remote Sens. 2021, 13, 1327. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, W.; Zhu, B. SAR image nearshore ship target detection in complex environment. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 1964–1968. [Google Scholar] [CrossRef]
- Zhao, K.; Zhou, Y.; Chen, X.; Wang, B.; Zhang, Y. Ship detection from scratch in Synthetic Aperture Radar (SAR) images. Int. J. Remote Sens. 2021, 42, 5010–5024. [Google Scholar] [CrossRef]
- Ma, Z. High-Speed Lightweight Ship Detection Algorithm Based on YOLO-V4 for Three-Channels RGB SAR Image. Remote Sens. 2021, 13, 1909. [Google Scholar] [CrossRef]
- Zhong, R. On-Board Real-Time Ship Detection in HISEA-1 SAR Images Based on CFAR and Lightweight Deep Learning. Remote Sens. 2021, 13, 1995. [Google Scholar] [CrossRef]
- Hong, Z.; Yang, T.; Tong, X.; Zhang, Y.; Jiang, S.; Zhou, R.; Han, Y.; Wang, J.; Yang, S.; Liu, S. Multi-Scale Ship Detection from SAR and Optical Imagery via A More Accurate YOLOv3. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6083–6101. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, G.; Li, S.; Liu, S.; Wang, S. An Effective Ship Detection Method Based on RefineDet in SAR Images. In Proceedings of the 2021 International Conference on Communications, Information System and Computer Engineering (CISCE), Beijing, China, 14–16 May 2021. [Google Scholar] [CrossRef]
- Shin, S.; Kim, Y.; Hwang, I.; Kim, J.; Kim, S. Coupling Denoising to Detection for SAR Imagery. Appl. Sci. 2021, 11, 5569. [Google Scholar] [CrossRef]
- Hu, H. TWC-Net: A SAR Ship Detection Using Two-Way Convolution and Multiscale Feature Mapping. Remote Sens. 2021, 13, 2558. [Google Scholar] [CrossRef]
- Sun, W.; Huang, X. Semantic attention-based network for inshore SAR ship detection. In Proceedings of the SPIE 11878, Thirteenth International Conference on Digital Image Processing (ICDIP 2021), Singapore, 30 June 2021; Volume 118782A. [Google Scholar]
- Wu, Z.; Hou, B.; Ren, B.; Ren, Z.; Wang, S.; Jiao, L. A Deep Detection Network Based on Interaction of Instance Segmentation and Object Detection for SAR Images. Remote Sens. 2021, 13, 2582. [Google Scholar] [CrossRef]
- Dong, Y.; Zhang, H.; Wang, C.; Zhang, B.; Li, L. Ship Detection based on M2Det for SAR images under Heavy Sea State. In Proceedings of the EUSAR 2021 13th European Conference on Synthetic Aperture Radar. VDE, Online, 29 March–1 April 2021; pp. 1–4. [Google Scholar]
- Sun, K.; Liang, Y.; Ma, X.; Huai, Y.; Xing, M. DSDet: A Lightweight Densely Connected Sparsely Activated Detector for Ship Target Detection in High-Resolution SAR Images. Remote Sens. 2021, 13, 2743. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Ke, X. Quad-FPN: A Novel Quad Feature Pyramid Network for SAR Ship Detection. Remote Sens. 2021, 13, 2771. [Google Scholar] [CrossRef]
- Sun, Z.; Dai, M.; Leng, X.; Lei, Y.; Xiong, B.; Ji, K.; Kuang, G. An Anchor-free Detection Method for Ship Targets in High-Resolution SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7799–7816. [Google Scholar] [CrossRef]
- Zhang, X.; Huo, C.; Xu, N.; Jiang, H.; Cao, Y.; Ni, L.; Pan, C. Multitask Learning for Ship Detection from Synthetic Aperture Radar Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8048–8062. [Google Scholar] [CrossRef]
- Du, Y.; Du, L.; Li, L. An SAR Target Detector Based on Gradient Harmonized Mechanism and Attention Mechanism. IEEE Geosci. Remote Sens. Lett. 2021, 19, 4017005. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Li, J.; Xu, X.; Wang, B.; Zhan, X.; Xu, Y.; Ke, X.; Zeng, T.; Su, H. SAR Ship Detection Dataset (SSDD): Official Release and Comprehensive Data Analysis. Remote Sens. 2021, 13, 3690. [Google Scholar] [CrossRef]
- Liu, F.; Li, Y. SAR remote sensing image ship detection method NanoDet based on visual saliency. J. Radars 2021, 10, 885–894. [Google Scholar]
- Zhao, Y.; Zhao, L.; Liu, Z.; Hu, D.; Kuang, G.; Liu, L. Attentional Feature Refinement and Alignment Network for Aircraft Detection in SAR Imagery. arXiv 2022, arXiv:2201.07124. [Google Scholar] [CrossRef]
- Li, S.; Xiao, Y.; Zhang, Y.; Chu, L.; Qiu, R.C. Learning Efficient Representations for Enhanced Object Detection on Large-scene SAR Images. arXiv 2022, arXiv:2201.08958. [Google Scholar]
- Song, T.; Kim, S.; Kim, S.T.; Lee, J.; Sohn, K. Context-Preserving Instance-Level Augmentation and Deformable Convolution Networks for SAR Ship Detection. arXiv 2022, arXiv:2202.06513. [Google Scholar]
- Zhu, H.; Xie, Y.; Huang, H.; Jing, C.; Rong, Y.; Wang, C. DB-YOLO: A Duplicate Bilateral YOLO Network for Multi-Scale Ship Detection in SAR Images. Sensors 2021, 21, 8146. [Google Scholar] [CrossRef] [PubMed]
- Lin, S. A Lightweight Detection Model for SAR Aircraft in a Complex Environment. Remote Sens. 2021, 13, 5020. [Google Scholar] [CrossRef]
- Ding, C. SRSDD-v1.0: A High-Resolution SAR Rotation Ship Detection Dataset. Remote Sens. 2021, 13, 5104. [Google Scholar] [CrossRef]
- Qin, M. A Fast and Lightweight Detection Network for Multi-Scale SAR Ship Detection under Complex Backgrounds. Remote Sens. 2021, 14, 31. [Google Scholar] [CrossRef]
- Zhou, K.; Zhang, M.; Wang, H.; Tan, J. Ship Detection in SAR Images Based on Multi-Scale Feature Extraction and Adaptive Feature Fusion. Remote Sens. 2022, 14, 755. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, G.; Zhou, H.; Wang, S.; Feng, Z.; Yue, S. A Ship Detection Method via Redesigned FCOS in Large-Scale SAR Images. Remote Sens. 2022, 14, 1153. [Google Scholar] [CrossRef]
- Liu, S.; Kong, W.; Chen, X.; Xu, M.; Yasir, M.; Zhao, L.; Li, J. Multi-Scale Ship Detection Algorithm Based on a Lightweight Neural Network for Spaceborne SAR Images. Remote Sens. 2022, 14, 1149. [Google Scholar] [CrossRef]
- Xia, R.; Chen, J.; Huang, Z.; Wan, H.; Wu, B.; Sun, L.; Yao, B.; Xiang, H.; Xing, M. CRTransSar: A Visual Transformer Based on Contextual Joint Representation Learning for SAR Ship Detection. Remote Sens. 2022, 14, 1488. [Google Scholar] [CrossRef]
- Everingham, M.; Eslami, S.; Gool, L.V.; Williams, C.; Winn, J.; Zisserman, A. The pascal visual object classes challenge: A retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, P.; Dollár, P.; Zitnick, C.L. Microsoft Coco: Common Objects in Context. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.Q.; He, K.M.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; IEEE Press: Piscataway, NJ, USA, 2016; pp. 779–788. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox detectorM. Computer Vision—ECCV 2016; Springer International Publishing: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar] [CrossRef] [Green Version]
- Jia, Y.Q.; Shelhamer, E.; Donahue, J.; Karayev, S.; Long, J.; Girshick, R.; Guadarrama, S.; Darrell, T. Caffe: Convolutional architecture for fast feature embedding. In Proceedings of the 22nd ACM International Conference on Multimedia; ACM Press: New York, NY, USA, 2014; pp. 675–678. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. Tensorflow: Large-scale machine learning on heterogeneous distributed systems. arXiv 2016, arXiv:1603.04467. [Google Scholar] [CrossRef]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.M.; Gimelshein, N.; Antiga, L.; et al. Pytorch: An imperative style, high-performance deep learning library. Adv. Neural Inf. Process. Syst. 2019, 32, 8024–8035. [Google Scholar]
- Available online: http://radars.ie.ac.cn/web/data/getData?newsColumnId=74fe223a-0b01-4830-8d99-1ba276e67ad8&pageType=en (accessed on 23 April 2021).
- Xu, C.; Su, H.; Li, J.; Li, Y.; Yao, L.; Gao, L.; Yan, W. RSDD-SAR: Rotated Ship Detection Dataset in SAR Images. J. Radars. in press.
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. Adv. Neural Inf. Process. Syst. 2016, 29. [Google Scholar] [CrossRef]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; IEEE Press: Piscataway, NJ, USA, 2017; pp. 936–944. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 18–23 June 2018; pp. 6154–6162. [Google Scholar] [CrossRef] [Green Version]
- He, K.M.; Gkioxari, G.; Dollár, P.; Girshick, R.B. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 386–397. [Google Scholar] [CrossRef]
- Li, Z.; Peng, C.; Yu, G.; Zhang, X.Y.; Deng, Y.D.; Sun, J. Light-head r-cnn: In defense of two-stage object detector. arXiv 2017, arXiv:1711.07264. [Google Scholar] [CrossRef]
- Liu, S.; Huang, D.; Wang, Y. Learning spatial fusion for single-shot object detection. arXiv 2019, arXiv:1911.09516. [Google Scholar] [CrossRef]
- Golnaz, G.; Lin, T.; Le, Q.V. Nas-fpn: Learning scalable feature pyramid architecture for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–17 June 2019. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and Efficient Object Detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European conference on computer vision (ECCV), Glasgow, UK, 23–28 August 2018; pp. 3–19. [Google Scholar] [CrossRef] [Green Version]
- Shrivastava, A.; Gupta, A.; Girshick, R. Training Region-based Object Detectors with Online Hard Example Mining. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, Nevada, USA, 27–30 June 2016; pp. 761–769. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Liu, Y.; Wang, X. Gradient Harmonized Single-Stage Detector. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2019; Volume 33, pp. 8577–8584. [Google Scholar] [CrossRef]
- Pang, J.; Chen, K.; Shi, J.; Feng, H.J.; Ouyang, W.L.; Lin, D.H. Libra R-CNN: Towards Balanced Learning for Object Detection. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 July 2020. [Google Scholar] [CrossRef] [Green Version]
- Bodla, N.; Singh, B.; Chellappa, R.; Davis, L.S. Soft-NMS—improving object detection with one line of code. In Proceedings of the IEEE International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2017; pp. 5561–5569. [Google Scholar] [CrossRef]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 99, 2999–3007. [Google Scholar] [CrossRef] [Green Version]
- Law, H.; Deng, J. CornerNet: Detecting Objects as Paired Keypoints. Int. J. Comput. Vis. 2018, 734–750. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; IEEE Press: Piscataway, NJ, USA, 2017; pp. 6517–6525. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLOv3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, P.; Ren, D.; Liu, W.; Ye, R.; Hu, Q.; Zuo, W. Enhancing Geometric Factors in Model Learning and Inference for Object Detection and Instance Segmentation. IEEE Trans. Cybern. 2020, 7, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Jiang, Y.; Wang, Z.; Cao, Z.; Huang, T. UnitBox: An Advanced Object Detection Network. In Proceedings of the 24th ACM International Conference on Multimedia, Amsterdam, The Netherlands, 15–19 October 2016. [Google Scholar] [CrossRef] [Green Version]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.Y.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 July 2019. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU loss: Faster and better learning for bounding box regression. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; Volume 34, pp. 12993–13000. [Google Scholar] [CrossRef]
- Liu, S.; Huang, D.; Wang, Y. 2018. Receptive field block net for accurate and fast object detection. arXiv 2017, arXiv:1711.07767. [Google Scholar] [CrossRef]
- Zhao, Q.; Sheng, T.; Wang, Y.; Tang, Z.; Chen, Y.; Cai, L.; Ling, H. M2Det: A Single-Shot Object Detector Based on Multi-Level Feature Pyramid Network. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2019; Volume 33, pp. 9259–9266. [Google Scholar] [CrossRef]
- Huang, R.; Pedoeem, J.; Chen, C. YOLO-LITE: A Real-Time Object Detection Algorithm Optimized for Non-GPU Computers. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Zhuo, J.; Krhenbühl, P. Bottom-Up Object Detection by Grouping Extreme and Center Points. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 July 2020. [Google Scholar] [CrossRef] [Green Version]
- Duan, K.; Bai, S.; Xie, L.; Qi, H.; Huang, Q.; Tian, Q. Centernet: Keypoint triplets for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2019; pp. 6569–6578. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, D.; Krhenbühl, P. Objects as Points. arXiv 2019, arXiv:1904.07850. [Google Scholar] [CrossRef]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully Convolutional One-Stage Object Detection. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2020. [Google Scholar] [CrossRef] [Green Version]
- Kong, T.; Sun, F.; Liu, H.; Jiang, Y.; Shi, J. FoveaBox: Beyond anchor-based object detector. IEEE Trans. Image Process. 2020, 29, 7389–7398. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation; Springer International Publishing: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef] [Green Version]
- Shen, Z.; Liu, Z.; Li, J.; Jiang, Y.; Chen, Y.; Xue, X. Object detection from scratch with deep supervision. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 42, 398–412. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Z.; Peng, C.; Yu, G.; Zhang, X.; Deng, Y.; Sun, J. Detnet: A backbone network for object detection. arXiv 2018, arXiv:1804.06215. [Google Scholar] [CrossRef]
- Zhu, R.; Zhang, S.; Wang, X.; Wen, L.; Shi, H.; Bo, L.; Mei, T. ScratchDet: Training Single-Shot Object Detectors from Scratch. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 July 2019. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Girshick, R.; Dollár, P. Rethinking imagenet pre-training. In Proceedings of the IEEE International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2019; pp. 4918–4927. [Google Scholar] [CrossRef] [Green Version]
- Shi, B.; Bai, X.; Belongie, S. Detecting Oriented Text in Natural Images by Linking Segments. IEEE Comput. Soc. 2017, 2550–2558. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Shao, W.; Ye, H.; Wang, L.; Wang, H.; Zheng, Y.; Xue, X. Arbitrary-Oriented Scene Text Detection via Rotation Proposals. IEEE Trans. Multimed. 2018, 20, 3111–3122. [Google Scholar] [CrossRef] [Green Version]
- Liao, M.; Shi, B.; Bai, X.; Wang, X.; Liu, W. Textboxes: A fast text detector with a single deep neural network. In Proceedings of the Thirty-first AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2017. [Google Scholar]
- Liao, M.; Shi, B.; Bai, X. TextBoxes++: A Single-Shot Oriented Scene Text Detector. IEEE Trans. Image Process. 2018, 27, 3676–3690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, Y.; Zhu, X.; Wang, X.; Yang, S.; Li, W.; Wang, H.; Fu, P.; Luo, Z. R2CNN: Rotational region CNN for orientation robust scene text detection. arXiv 2017, arXiv:1706.09579. [Google Scholar] [CrossRef]
- Liu, W.; Ma, L.; Chen, H. Arbitrary-oriented ship detection framework in optical remote sensing images. IEEE Geosci. Remote Sens. Lett. 2017, 15, 937–941. [Google Scholar] [CrossRef]
- Xue, Y.; Sun, H.; Fu, K.; Yang, J.; Sun, X.; Yan, M.; Guo, Z. Automatic ship detection in remote sensing images from google earth of complex scenes based on multiscale rotation dense feature pyramid networks. Remote Sens. 2018, 10, 32. [Google Scholar]
- Yang, X.; Sun, H.; Sun, X.; Yan, M.; Guo, Z.; Fu, K. Position detection and direction prediction for arbitrary-oriented ships via multitask rotation region convolutional neural network. IEEE Access 2018, 6, 50839–50849. [Google Scholar] [CrossRef]
- Li, K.; Cheng, G.; Bu, S.; You, X. Rotation-insensitive and context-augmented object detection in remote sensing images. IEEE Trans. Geosci. Remote. Sens. 2017, 56, 2337–2348. [Google Scholar] [CrossRef]
- Ding, J.; Xue, N.; Long, Y.; Xia, G.; Lu, Q. Learning RoI Transformer for Oriented Object Detection in Aerial Images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition(CVPR), Long Beach, CA, USA, 15–20 July 2019; pp. 2849–2858. [Google Scholar] [CrossRef]
- Gong, W.; Shi, Z.; Wu, Z.; Luo, J. Arbitrary-oriented ship detection via feature fusion and visual attention for high-resolution optical remote sensing imagery. Int. J. Remote Sens. 2021, 42, 2622–2640. [Google Scholar] [CrossRef]
- Liu, L.; Pan, Z.; Lei, B. Learning a rotation invariant detector with rotatable bounding box. arXiv 2017, arXiv:1711.09405. [Google Scholar] [CrossRef]
- Li, X.; Wang, W.; Hu, X.; Yang, J. Selective kernel networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2019; pp. 510–519. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Wang, X.; Wei, Y.; Huang, C.; Wei, Y.; Liu, W. CCNet: Criss-Cross Attention for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2020. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, J. OCNet: Object Context Network for Scene Parsing. arXiv 2018, arXiv:1809.00916. [Google Scholar] [CrossRef]
- Lin, X.; Guo, Y.; Wang, J. Global Correlation Network: End-to-End Joint Multi-Object Detection and Tracking. arXiv 2021, arXiv:2103.12511. [Google Scholar] [CrossRef]
- Fu, J.; Liu, J.; Tian, H.; Li, Y.; Bao, Y.; Fang, Z.; Lu, H. Dual Attention Network for Scene Segmentation. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 July 2020. [Google Scholar] [CrossRef] [Green Version]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszko-reit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 5998–6008. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 10012–10022. [Google Scholar] [CrossRef]
- Wu, J.; Leng, C.; Wang, Y.; Hu, Q.; Cheng, J. Quantized convolutional neural networks for mobile devices. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 July 2016. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Zhang, X.; Sun, J. Channel pruning for accelerating very deep neural networks. In Proceedings of the IEEE International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2017; pp. 1389–1397. [Google Scholar] [CrossRef] [Green Version]
- Gong, Y.; Liu, L.; Yang, M.; Bourdev, L.D. Compressing deep convolutional networks using vector quantization. arXiv 2014, arXiv:1412.6115. [Google Scholar]
- Molchanov, P.; Tyree, S.; Karras, T.; Aila, T.; Kautz, J. Pruning convolutional neural networks for resource efficient inference. arXiv 2016, arXiv:1611.06440. [Google Scholar] [CrossRef]
- Han, S.; Mao, H.; Dally, W.J. Deep Compression: Compressing Deep Neural Networks with Pruning, Trained Quantization and Huffman Coding. arXiv 2016, arXiv:1510.00149. [Google Scholar]
- Han, S.; Pool, J.; Tran, J.; Dally, W. Learning both weights and connections for efficient neural network. Adv. Neural Inf. Process. Syst. 2015, 28. [Google Scholar] [CrossRef]
- Molchanov, P.; Tyree, S.; Karras, T.; Aila, T.; Kautz, J. Pruning convolutional neural networks for resource efficient transfer learning. arXiv 2017, arXiv:1611.06440. [Google Scholar]
- Shao, F.; Chen, L.; Shao, J.; Ji, W.; Xiao, S.; Ye, L.; Zhuang, Y.; Xiao, J. Deep Learning for Weakly-Supervised Object Detection and Object Localization: A Survey. Neurocomputing 2022, 192–207. [Google Scholar] [CrossRef]
- Creswell, A.; White, T.; Dumoulin, V.; Arulkumaran, K.; Sengupta, B.; Bharath, A. Generative adversarial networks: An overview. IEEE Signal Process. Mag. 2018, 35, 53–65. [Google Scholar] [CrossRef] [Green Version]
- Zoph, B.; Cubuk, E.D.; Ghiasi, G.; Lin, T.; Shlens, J.; Le, Q.V. Learning data augmentation strategies for object detection. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2020; pp. 566–583. [Google Scholar] [CrossRef]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-end object detection with transformers. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2020; pp. 213–229. [Google Scholar] [CrossRef]
- Zhang, H.; Li, F.; Liu, S.; Zhang, L.; Su, H.; Zhu, J.; Ni, L.M.; Shum, H. DINO: DETR with Improved DeNoising Anchor Boxes for End-to-End Object Detection. arXiv 2022. e-prints. [Google Scholar]
- Zhang, T.; Zhang, X. Injection of Traditional Hand-Crafted Features into Modern CNN-Based Models for SAR Ship Classification: What, Why, Where, and How. Remote Sens. 2021, 13, 2091. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. HTC+ for SAR Ship Instance Segmentation. Remote Sens. 2022, 14, 2395. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Ke, X.; Liu, C.; Xu, X.; Zhan, X.; Wang, C.; Ahmad, I.; Zhou, Y.; Pan, D.; et al. HOG-ShipCLSNet: A novel deep learning network with hog feature fusion for SAR ship classification. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–22. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. Squeeze-and-excitation Laplacian pyramid network with dual-polarization feature fusion for ship classification in sar images. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. A Full-Level Context Squeeze-and-Excitation ROI Extractor for SAR Ship Instance Segmentation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X.; Liu, C.; Shi, J.; Wei, S.; Ahmad, I.; Zhan, X.; Zhou, Y.; Pan, D.; Li, J.; et al. Balance learning for ship detection from synthetic aperture radar remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2021, 182, 190–207. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, X. A polarization fusion network with geometric feature embedding for SAR ship classification. Pattern Recognit. 2022, 123, 108365. [Google Scholar] [CrossRef]
- Heiselberg, H. Ship-iceberg classification in SAR and multispectral satellite images with neural networks. Remote Sens. 2020, 12, 2353. [Google Scholar] [CrossRef]
- Heiselberg, P.; Sørensen, K.A.; Heiselberg, H.; Andersen, O.B. SAR Ship–Iceberg Discrimination in Arctic Conditions Using Deep Learning. Remote Sens. 2022, 14, 2236. [Google Scholar] [CrossRef]
- Heiselberg, H.; Stateczny, A. Remote sensing in vessel detection and navigation. Sensors 2020, 20, 5841. [Google Scholar] [CrossRef] [PubMed]















| Algorithms | AP (Average Precision) |
|---|---|
| CFAR method based on K distribution | 19.2% |
| optimal entropy automatic threshold method | 28.2% |
| Faster R-CNN | 79.3% |
| SSD-512 | 74.3% |
| Datasets | 2016 | 2017 | 2018 | 2019 | 2020 | 2021 | 2022 | Total |
|---|---|---|---|---|---|---|---|---|
| SSDD | 0 | 1 | 2 | 19 | 28 | 29 | 4 | 83 |
| SSDD+ | 0 | 0 | 1 | 2 | 1 | 2 | 0 | 6 |
| SAR-Ship-Dataset | 0 | 0 | 0 | 1 | 4 | 14 | 1 | 20 |
| AIR-SARShip1.0/2.0 | 0 | 0 | 0 | 1 | 3 | 5 | 0 | 9 |
| HRSID | 0 | 0 | 0 | 0 | 2 | 6 | 1 | 9 |
| LS-SSDD-v1.0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 3 |
| Official-SSDD | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 |
| SRSD-v1.0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 |
| RSDD-SAR | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 |
| Total | 0 | 1 | 3 | 23 | 40 | 58 | 8 | 133 |
| Satellites | 2016 | 2017 | 2018 | 2019 | 2020 | 2021 | 2022 | Total |
|---|---|---|---|---|---|---|---|---|
| Sentinel-1 | 1 | 4 | 7 | 6 | 6 | 2 | 0 | 26 |
| RadarSat-2 | 1 | 0 | 2 | 2 | 2 | 0 | 0 | 7 |
| ALOS PALSAR | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 |
| TerraSAR-X | 0 | 1 | 0 | 0 | 3 | 0 | 0 | 4 |
| Gaofen-3 | 0 | 1 | 5 | 6 | 5 | 2 | 1 | 20 |
| COSMO_SKYMed | 0 | 0 | 1 | 0 | 2 | 0 | 0 | 3 |
| AISSAR | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 |
| Framework | 2016 | 2017 | 2018 | 2019 | 2020 | 2021 | 2022 | Total |
|---|---|---|---|---|---|---|---|---|
| Caffe | 0 | 3 | 9 | 3 | 6 | 2 | 0 | 23 |
| Tensorflow | 0 | 2 | 3 | 12 | 5 | 7 | 0 | 29 |
| Pytorch | 0 | 0 | 0 | 3 | 19 | 18 | 6 | 44 |
| Keras | 0 | 0 | 0 | 1 | 3 | 3 | 0 | 7 |
| DarketNet | 0 | 0 | 0 | 0 | 1 | 3 | 0 | 4 |
| PaddlePaddle | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 |
| Algorithms | Datasets | Two-Stage | Single-Stage | Anchor Free | Scratch |
|---|---|---|---|---|---|
| Percentage | 5% | 26.7% | 25.6% | 5.1% | 4.0% |
| Algorithms | Oriented | Multi-scale | Attention | Real-time | Others |
| Percentage | 5.7% | 14.2% | 5.1% | 13.1% | 14.2% |
| Dataset | Date | Source | Resolution | Image Size | Images/Ships | Annotation |
|---|---|---|---|---|---|---|
| SSDD (SSDD+) | 1 December 2017 | RadarSat-2 TerraSAR Sentinel-1 | 1 m–15 m | 190–668 | 1160/2456 | vertical oriented |
| SAR-Ship-Dataset | 29 March 2019 | Gaofen-3 Sentinel-1 | 3 m–25 m | 256 × 256 | 43,918/59,535 | vertical |
| AIR-SARShip-1.0 AIR-SARShip-2.0 | 1 December 2019 25 August 2021 | Gaofen-3 | 1 m, 3 m | 3000 × 3000 1000 × 1000 | 31 300 | vertical |
| HRSID | 29 June 2020 | Sentinel-1 TerraSAR | 0.5 m, 1 m, 3 m | 800 × 800 | 5604/16,951 | polygon |
| LS-SSDD-v1.0 | 15 September 2020 | Sentinel-1 | 5 m, 20 m | 24,000 × 16,000 | 15/6015 | vertical |
| Official-SSDD | 15 September 2021 | The same as SSDD | polygon | |||
| SRSDD-v1.0 | 15 December 2021 | Gaofen-3 | 1 m | 1024 × 1024 | 666/2275 | oriented recognition |
| RSDD-SAR | April 2022 | Gaofen-3 TerraSAR | 2–20 m | 512 × 512 | 7000/10,263 | oriented |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Xu, C.; Su, H.; Gao, L.; Wang, T. Deep Learning for SAR Ship Detection: Past, Present and Future. Remote Sens. 2022, 14, 2712. https://doi.org/10.3390/rs14112712
Li J, Xu C, Su H, Gao L, Wang T. Deep Learning for SAR Ship Detection: Past, Present and Future. Remote Sensing. 2022; 14(11):2712. https://doi.org/10.3390/rs14112712
Chicago/Turabian StyleLi, Jianwei, Congan Xu, Hang Su, Long Gao, and Taoyang Wang. 2022. "Deep Learning for SAR Ship Detection: Past, Present and Future" Remote Sensing 14, no. 11: 2712. https://doi.org/10.3390/rs14112712
APA StyleLi, J., Xu, C., Su, H., Gao, L., & Wang, T. (2022). Deep Learning for SAR Ship Detection: Past, Present and Future. Remote Sensing, 14(11), 2712. https://doi.org/10.3390/rs14112712