
Offshore Bridge Detection in Polarimetric SAR Images Based on Water Network Construction Using Markov Tree



Abstract
:1. Introduction
2. General Segmentation Model of the Water Network
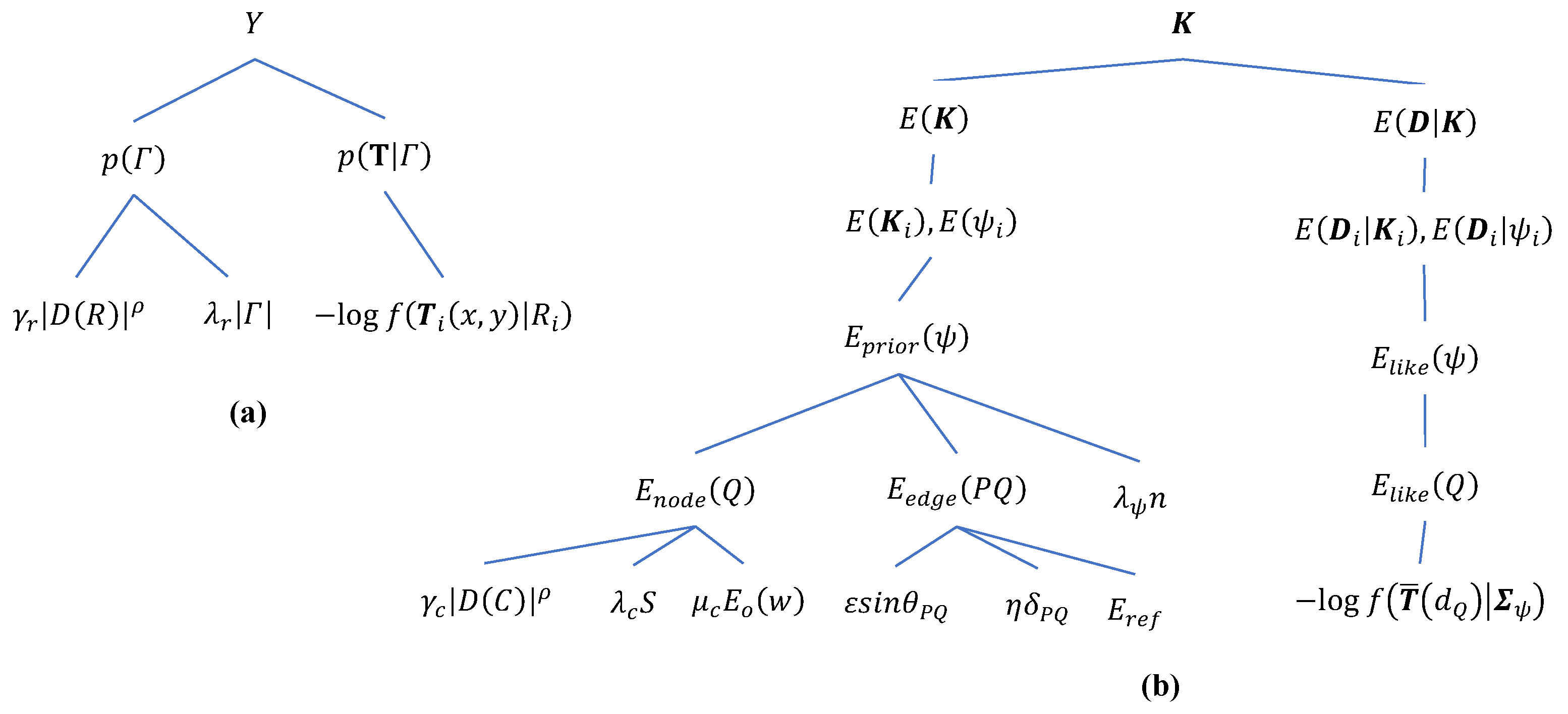
2.1. General Model of the Global Segmentation
2.2. Probability Distribution of a Region
2.3. Model of a Single Water Branch
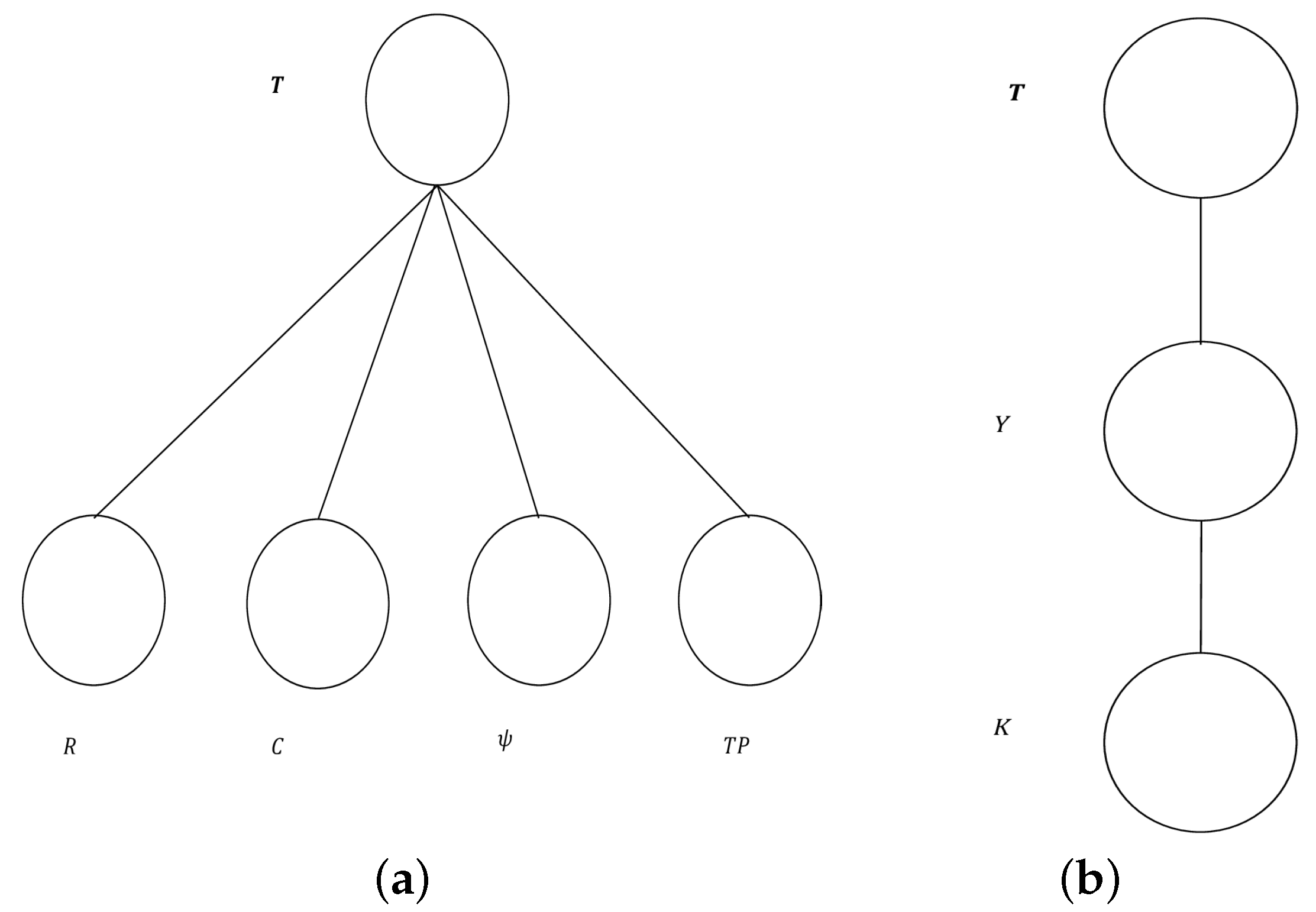
2.4. Model of Water Tributaries with a Tree Structure
3. The Proposed Method
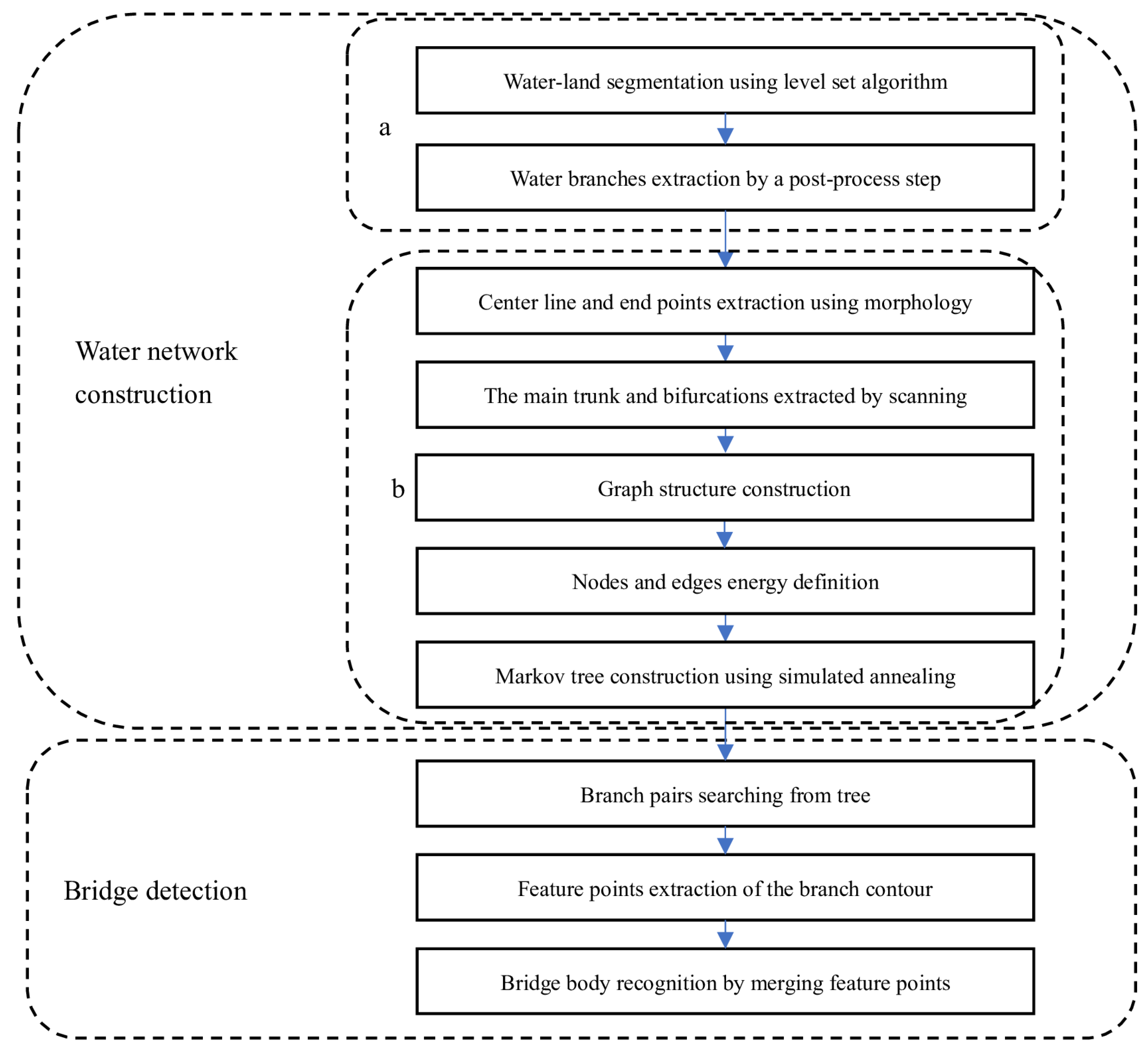
3.1. Overview of the Proposed Method
3.2. Water Branch Extraction
3.3. Water Branch Connection
3.3.1. Geometric Representation of a Branch
3.3.2. Main Trunk and Bifurcations Extraction
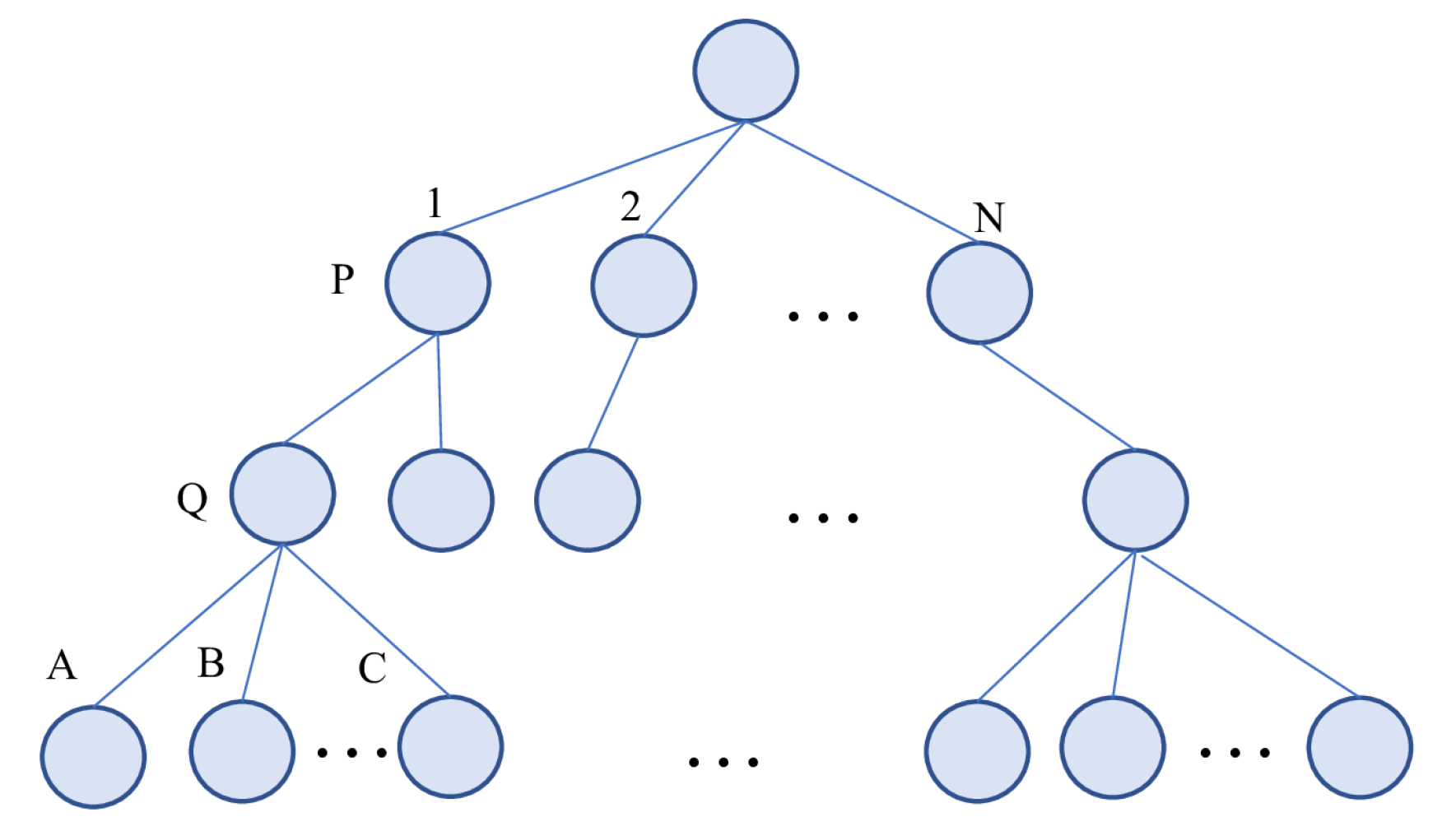
3.3.3. Graph Structure Construction
3.3.4. Node and Edge Energy Definition
3.3.5. Markov Tree Construction
- (1)
- Prior energy of Markov tree
- (2)
- Likelihood energy of Markov tree
- (3)
- Network construction based on Markov tree in global searching
| Algorithm 1: Water network construction based on Markov tree in global searching. |
|
- (4)
- Network construction based on Markov tree in local searching
| Algorithm 2: Water network construction based on Markov tree in local searching. |
|
3.4. Bridge Detection and Bridge Body Extraction
4. Experimental Results and Analysis
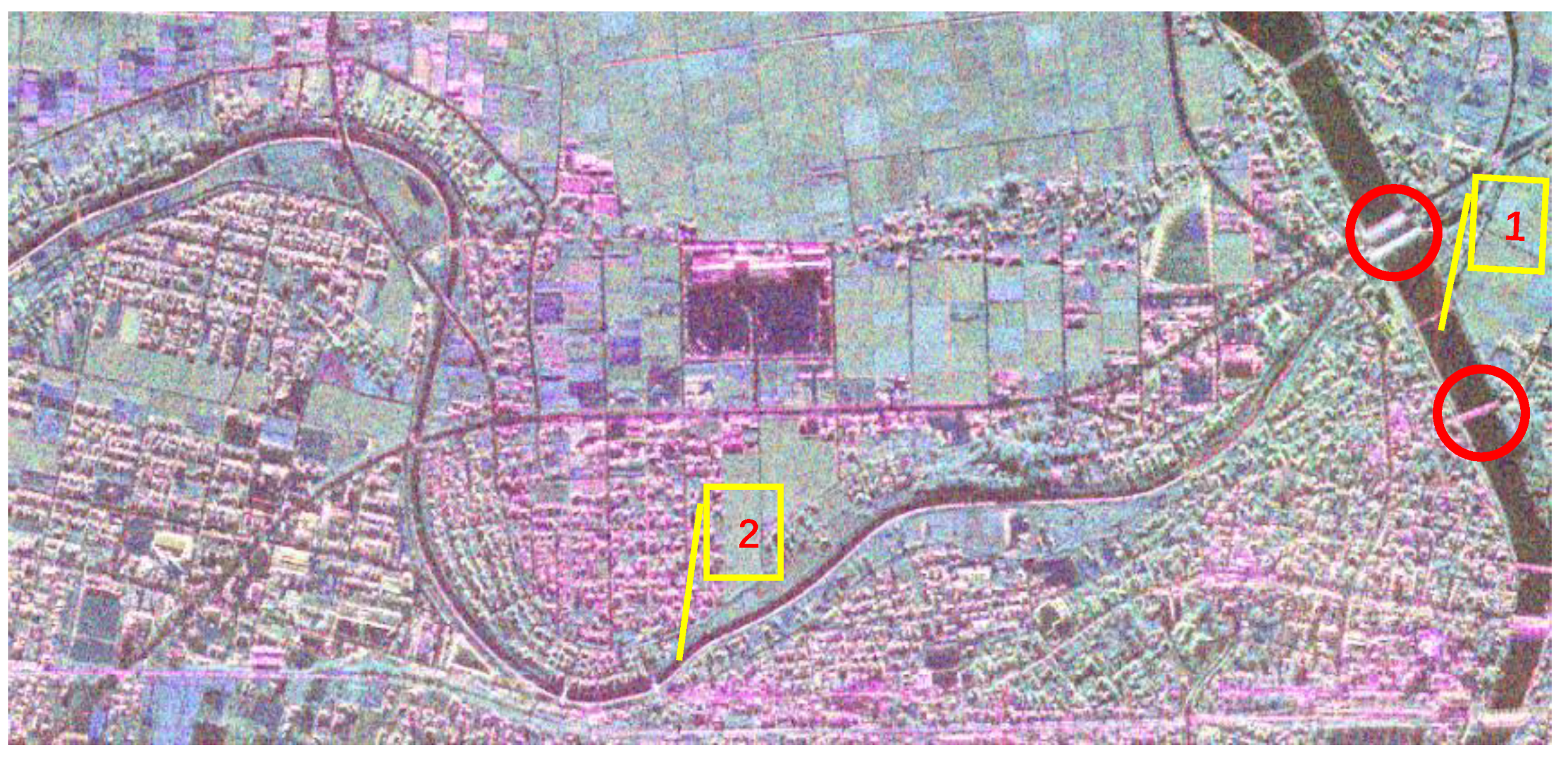
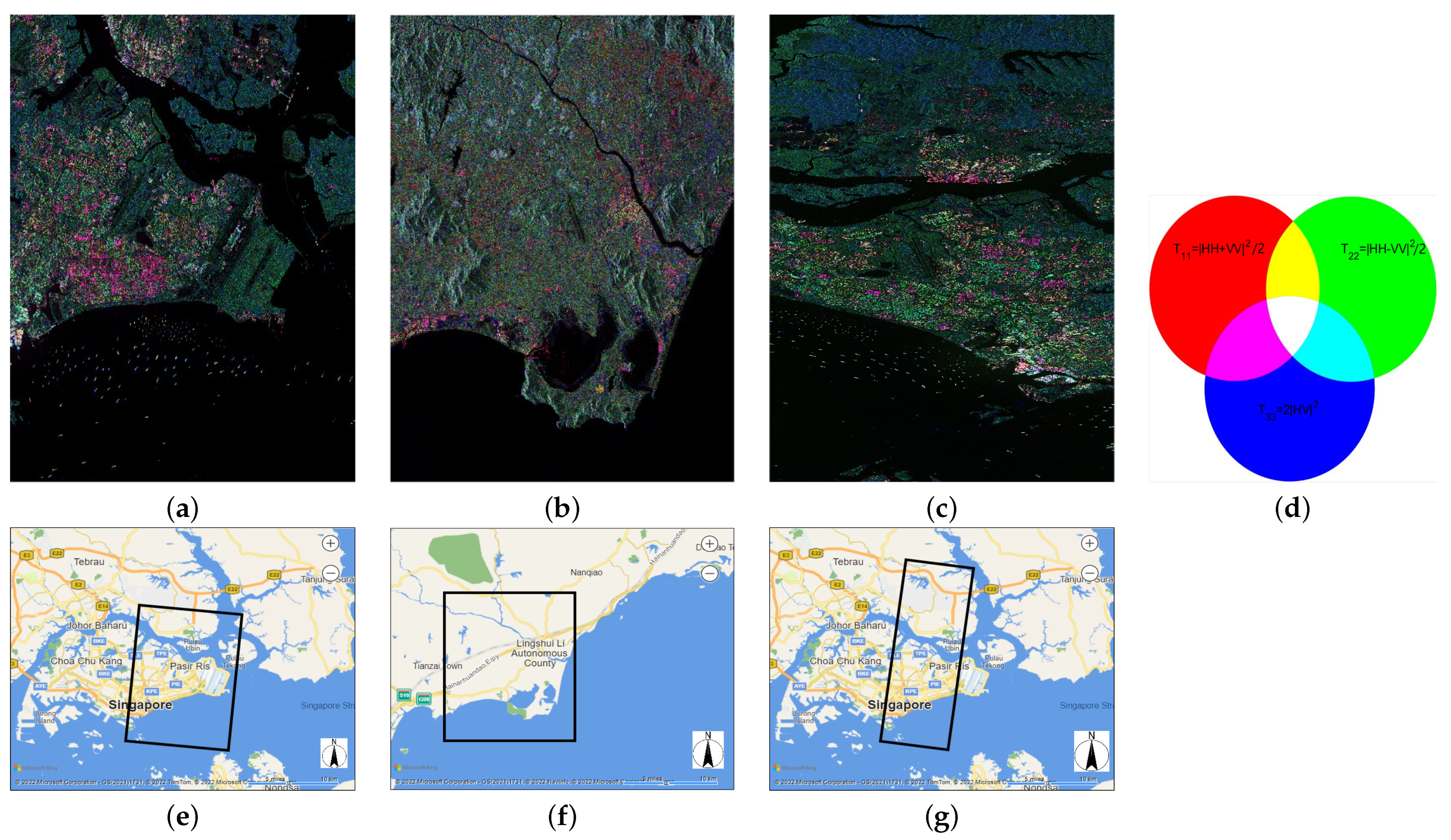
4.1. Data Description
4.2. Parameters Setting
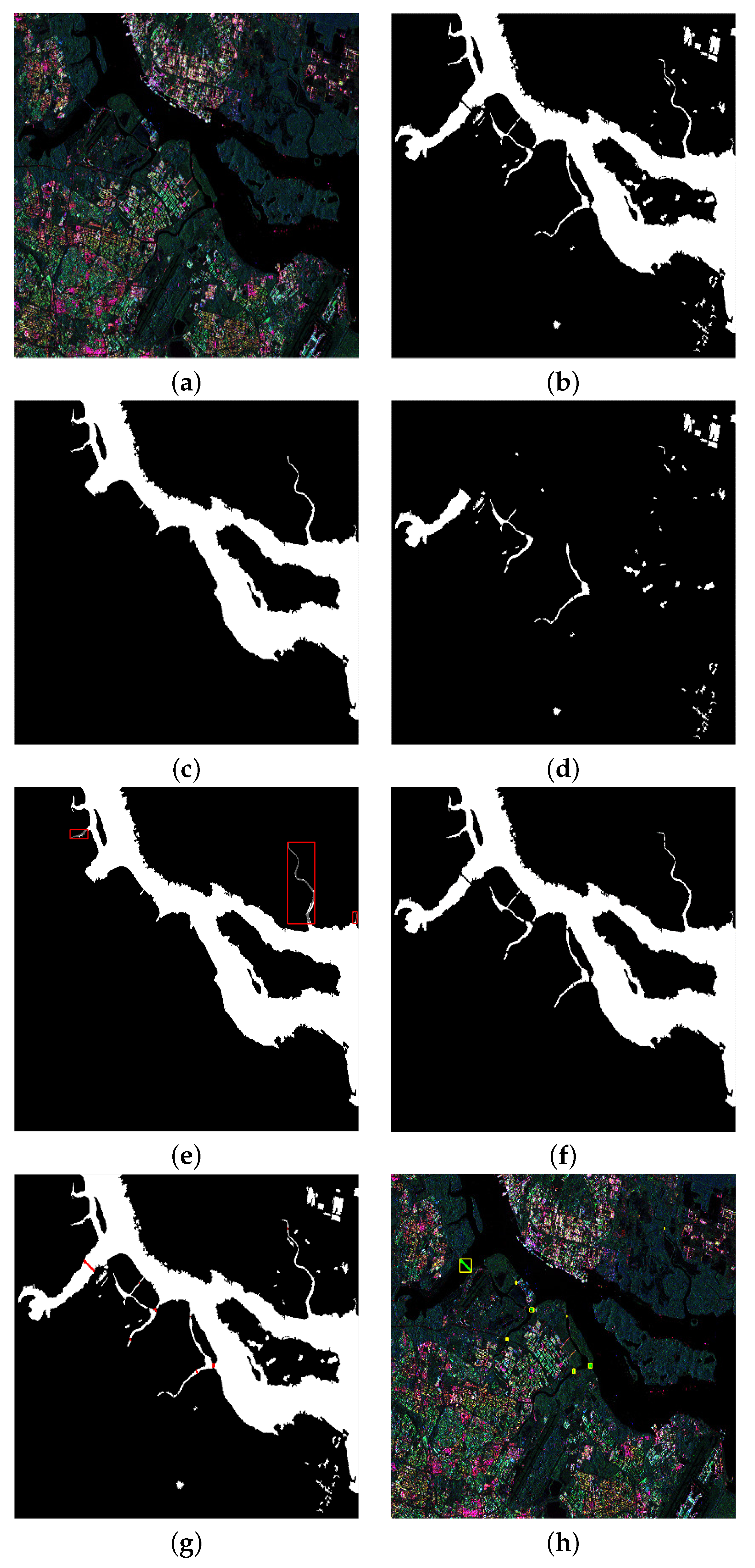
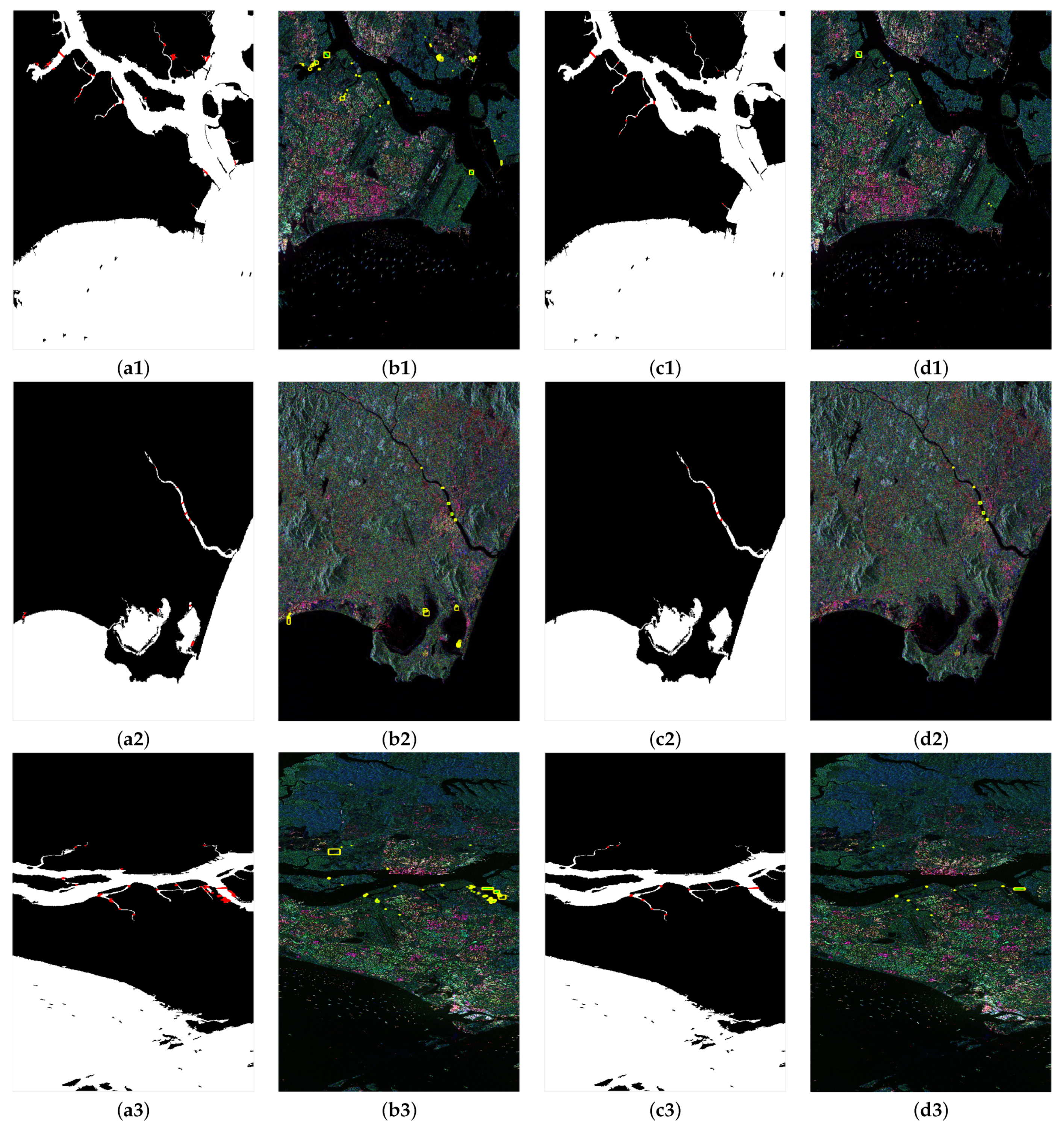
4.3. Example Results
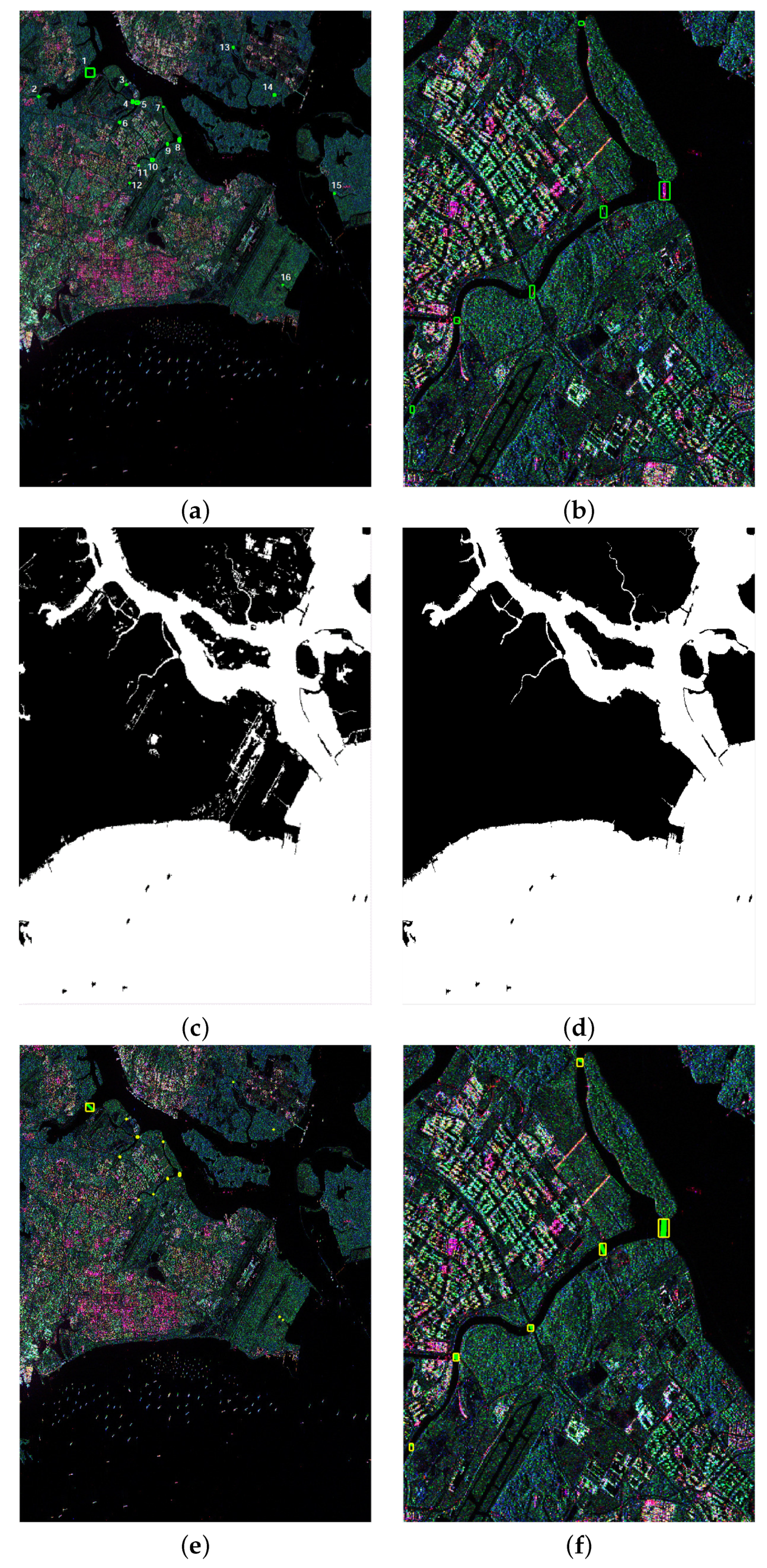
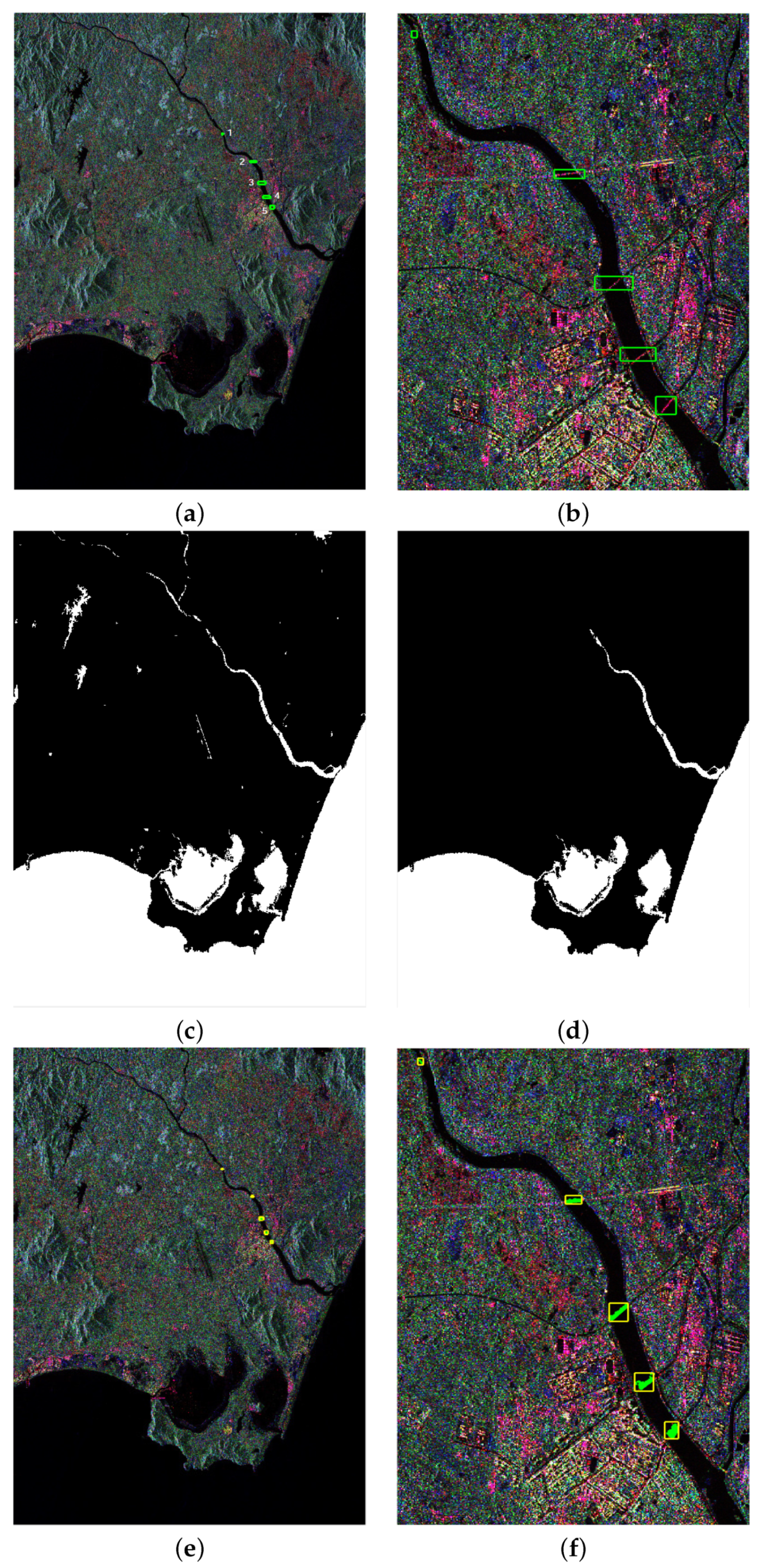
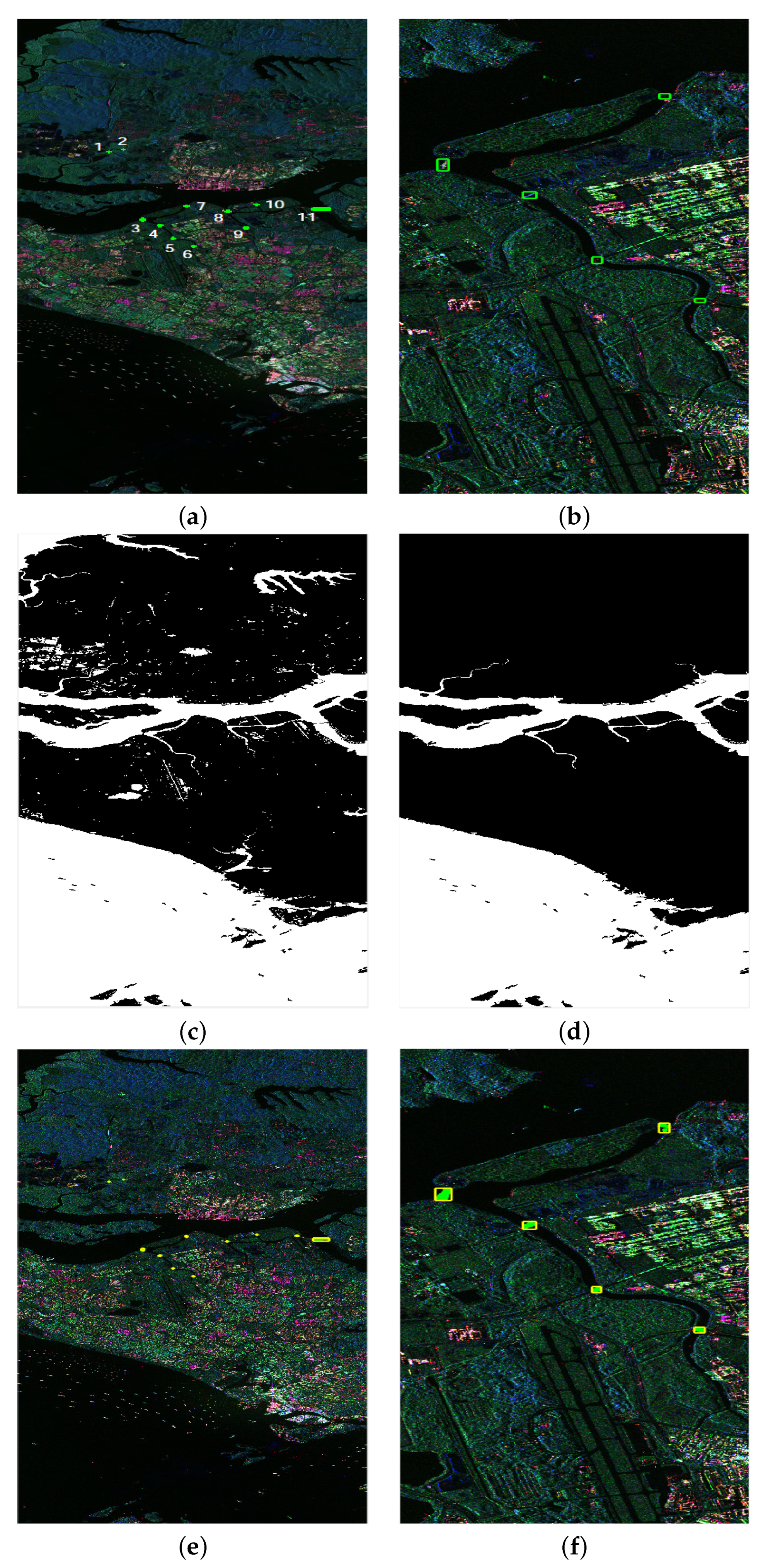
4.4. Performance Evaluation of the Proposed Method under Different Sites
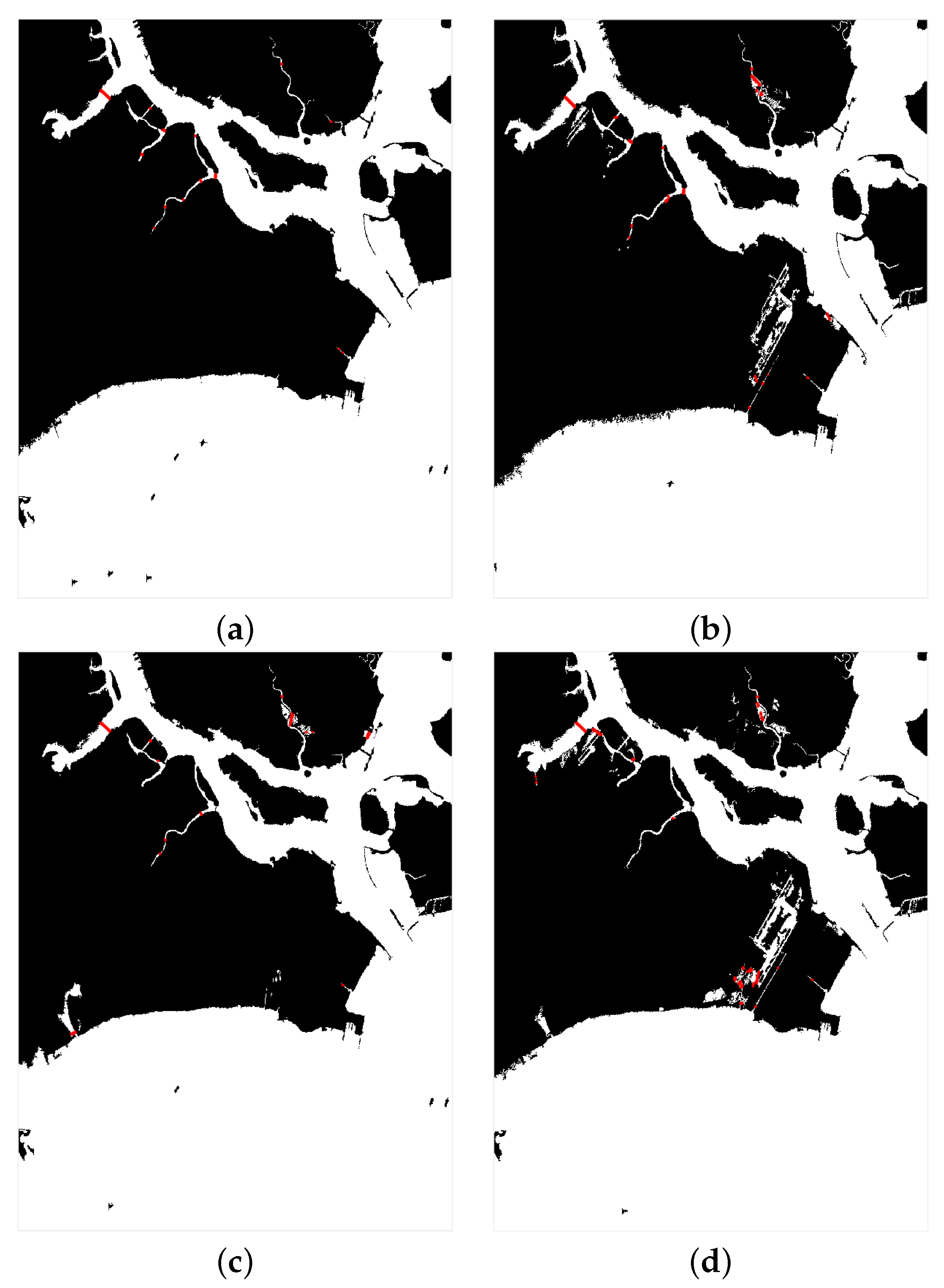
4.5. Comparison of the Proposed Method with Branch Merging Method
4.6. Comparison of Quad-Polarization with Single-Polarization Data
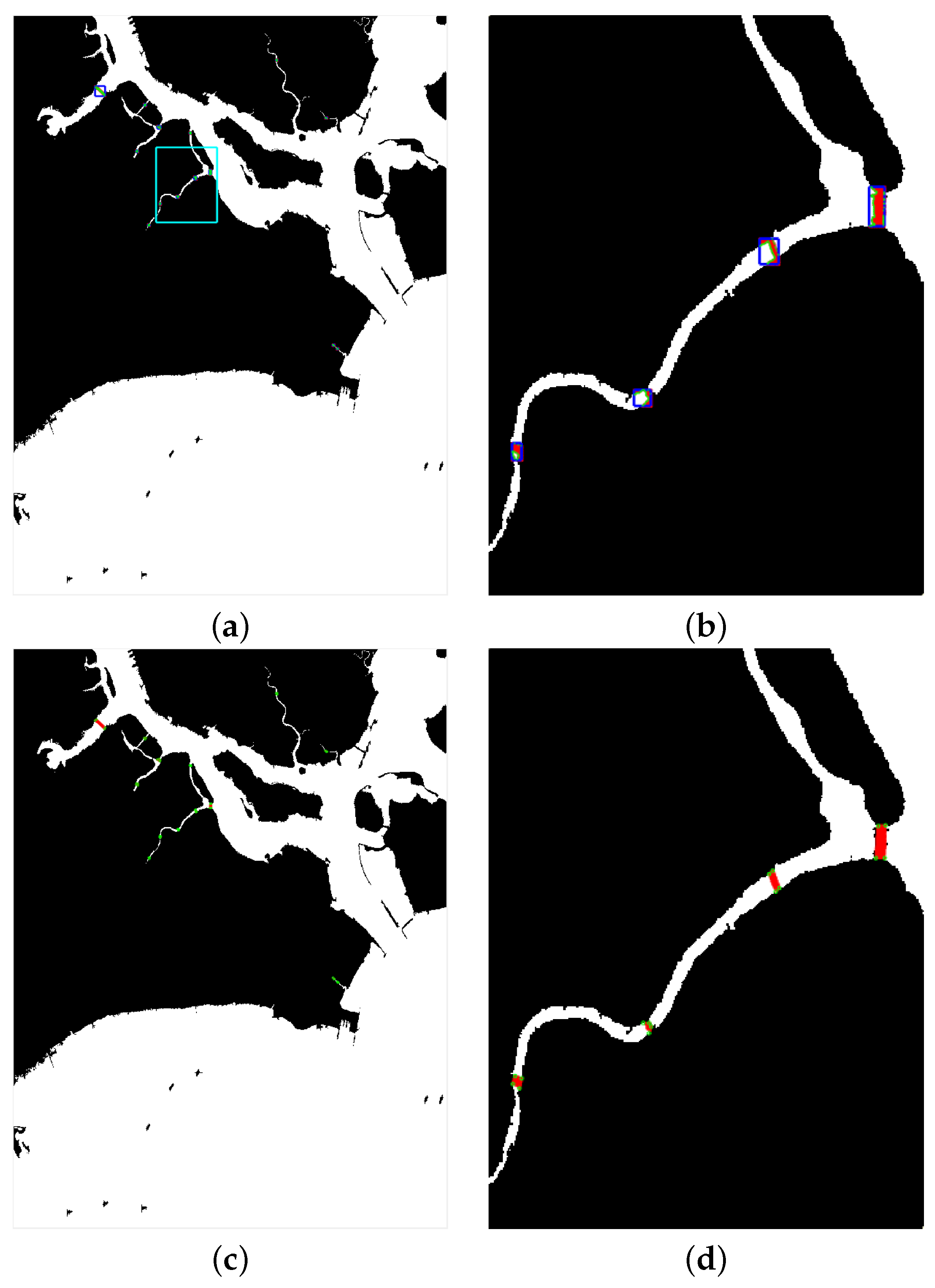
4.7. Comparison of the Bridge Body Recognition between the Proposed Method and the Spatial Method
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Symbol | Nomenclature |
|---|---|---|
| Section 2.1 | The image plane | |
| The given polarimetric SAR image | ||
| The topological relationship | ||
| Homogeneous regions | ||
| Free curve branches | ||
| Tree regions | ||
| The parameter set | ||
| The parameter space of | ||
| The prior probability of | ||
| The conditional likelihood probability of | ||
| The number of regions | ||
| The number of single branches | ||
| The number of trees | ||
| Section 2.2 | The average coherent matrix | |
| L | The number of looks | |
| The coherent matrix | ||
| p | The number of polarimetric channels | |
| The Wishart distribution | ||
| The probability of the coherent matrix | ||
| The prior probability of a segmentation region | ||
| The area of region R | ||
| The contour length of region R | ||
| The parameters of | ||
| Section 2.3 | C | A water branch |
| S | The whole length of the centerline of a branch | |
| The region of the branch C | ||
| The center curve of a branch | ||
| The width of a branch | ||
| The prior probability of branch C | ||
| The prior probability of region | ||
| The width of a branch | ||
| The prior probability of width | ||
| The prior energy of branch C | ||
| The area of region | ||
| The consistency function of | ||
| The parameters of | ||
| Section 2.4 | A tree tributary | |
| The prior probability of | ||
| The energy of the branch pair and | ||
| Section 3.2 | The boundary of the water and land segmentation | |
| The likelihood probability given the segmentation | ||
| The prior probability of | ||
| A water branch | ||
| The set of the water branches | ||
| The number of branches | ||
| Section 3.3 | The water network | |
| The labels of the branches | ||
| The value space of | ||
| The label vector of tree | ||
| The prior probability of | ||
| The likelihood probability of the | ||
| The prior probability of tree | ||
| The prior energy of tree | ||
| The likelihood energy of tree | ||
| Section 3.3.1 | The centerline of a branch | |
| The two endpoints of a branch | ||
| Section 3.3.2 | The scanning radius | |
| The perimeter of a region | ||
| A | The area of a region | |
| The ratio of length to width | ||
| Section 3.3.3 | N-tree | The number of children nodes in a tree |
| The reference distance | ||
| The reference angle | ||
| The extracted bifurcations | ||
| The number of the bifurcations | ||
| Section 3.3.4 | The edge energy of the edge | |
| The reference edge energy | ||
| Section 3.3.5 | The prior energy of branch node | |
| The prior node energy of branch node Q | ||
| The prior energy of tree | ||
| n | The number of nodes in a tree | |
| The parameter of regularization term | ||
| The likelihood energy of branch node Q | ||
| The likelihood energy of tree |
Appendix B

References
- Lee, J.; Krogager, E.; Ainsworth, T.; Boerner, W. Polarimetric analysis of radar signature of a manmade structure. IEEE Geosci. Remote Sens. Lett. 2006, 3, 555–559. [Google Scholar] [CrossRef]
- Luo, J.; Ming, D.; Liu, W.; Shen, Z.; Wang, M.; Sheng, H. Extraction of bridges over water from IKONOS panchromatic data. Int. J. Remote. Sens. 2007, 28, 3633–3648. [Google Scholar] [CrossRef]
- Chaudhuri, D.; Samal, A. An automatic bridge detection technique for multispectral images. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2720–2727. [Google Scholar] [CrossRef]
- Wang, W.; Sun, J.; Hu, R.; Mao, S. Knowledge-based bridge detection from SAR images. J. Syst. Eng. Electron. 2009, 20, 929–936. [Google Scholar]
- Chen, Y.; Chen, J.; Yang, J. Novel method for SAR image segmentation with application to bridge detection. In Proceedings of the IEEE 8th international Conference on Signal Processing, Guilin, China, 16–20 November 2006; p. 819. [Google Scholar]
- Chen, C.; Fu, J.; Gai, Y. Damaged bridges over water: Using high-spatial-resolution remote-sensing images for recognition. IEEE Geosci. Remote Sens. Mag. 2018, 6, 69–85. [Google Scholar] [CrossRef]
- Wang, J.; Huang, S.; Jiao, L. An automatic bridge detection technique for high resolution SAR images. In Proceedings of the 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar, Xi’an, China, 26–30 October 2009; pp. 498–501. [Google Scholar]
- Song, W.; Rho, S.; Kwag, Y. Automatic bridge detection scheme using CFAR detector in SAR images. In Proceedings of the 2011 3rd International Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Seoul, Korea, 26–30 September 2011; pp. 1–4. [Google Scholar]
- Yu, D.; Zhou, L.; Yang, J.; Peng, Y. Highway bridge detection based on polarimetric SAR data. J. Tsinghua Univ. 2005, 45, 888–891. [Google Scholar]
- Fern, A.; Musavi, M.; Miranda, J. Automatic extraction of drainage network from digital terrain elevation data: A local network approach. IEEE Trans. Geosci. Remote Sens. 2006, 36, 1007–1011. [Google Scholar] [CrossRef]
- Bai, R.; Li, T.; Huang, Y.; Li, J.; Wang, G. An efficient and comprehensive method for drainage network extraction from DEM with billions of pixels using a size-balanced binary search tree. IEEE Geosci. Remote Sens. Lett. 2015, 3, 555–559. [Google Scholar] [CrossRef]
- Gao, B. NDWI: A normalized difference water index for remote sensing of vegetation liquid water from space. Remote. Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Isikdogan, F.; Bovik, A.; Passalacqua, P. RivaMap: An automated river analysis and mapping engine. Remote. Sens. Environ. 2017, 202, 88–97. [Google Scholar] [CrossRef]
- Yang, K.; Li, M.; Liu, Y.; Cheng, L.; Duan, Y.; Zhou, M. River Delineation from Remotely Sensed Imagery Using a Multi-Scale Classification Approach. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 4726–4737. [Google Scholar] [CrossRef]
- Chen, H.; Liang, Q.; Liang, Z.; Liu, Y.; Ren, T. Extraction of connected river networks from multi-temporal remote sensing imagery using a path tracking technique. Remote. Sens. Environ. 2020, 246, 111868. [Google Scholar] [CrossRef]
- Isikdogan, F.; Bovik, A.; Passalacqua, P. Learning a River Network Extractor Using an Adaptive Loss Function. IEEE Geosci. Remote Sens. Lett. 2018, 15, 813–817. [Google Scholar] [CrossRef]
- Klemenjak, S.; Waske, B.; Valero, S.; Chanussot, J. Automatic Detection of Rivers in High-Resolution SAR Data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2012, 5, 1364–1372. [Google Scholar] [CrossRef]
- Liu, C.; Yang, J.; Yin, J.; An, W. Coastline Detection in SAR Images Using a Hierarchical Level Set Segmentation. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 4908–4920. [Google Scholar] [CrossRef]
- Liu, C.; Xiao, Y.; Yang, J. A Coastline Detection Method in Polarimetric SAR Images Mixing the Region-Based and Edge-Based Active Contour Models. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3735–3747. [Google Scholar] [CrossRef]
- Liu, C.; Yang, J.; Zheng, J.; Nie, X. An Unsupervised Port Detection Method in Polarimetric SAR Images Based on Three-Component Decomposition and Multi-Scale Thresholding Segmentation. Remote Sens. 2022, 14, 205. [Google Scholar] [CrossRef]
- Liu, C.; Yang, J.; Ou, J.; Fan, D. Offshore Oil Platform Detection in Polarimetric SAR Images Using Level Set Segmentation of Limited Initial Region and Convolutional Neural Network. Remote Sens. 2022, 14, 1729. [Google Scholar] [CrossRef]
- Obida, C.B.; Blackburn, G.A.; Whyatt, J.D.; Semple, K.T. River network delineation from Sentinel-1 SAR data. Int. J. Appl. Earth Obs. Geoinf. 2019, 83, 101910. [Google Scholar] [CrossRef]
- Tupin, F.; Maitre, H.; Mangin, J.; Nicolas, J.M.; Pechersky, E. Detection of linear features in SAR images: Application to road network extraction. IEEE Trans. Geosci. Remote Sens. 1998, 36, 434–453. [Google Scholar] [CrossRef]
- Krishnamachari, S.; Chellappa, R. Delineating buildings by grouping lines with MRFs. IEEE Trans. Image Process. 1996, 5, 164–168. [Google Scholar] [CrossRef] [PubMed]
- Tu, Z.; Zhu, S. Parsing Images into Regions, Curves, and Curve Groups. Int. J. Comput. Vis. 2006, 69, 223–249. [Google Scholar] [CrossRef]
- Tu, Z.; Zhu, S. Image segmentation by data-driven Markov chain Monte Carlo. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 657–673. [Google Scholar]
- Lee, J.; Pottier, E. Polarimetric Radar Imaging From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Geman, S.; Geman, D. Stochastic relaxation Gibbs distributions and the Bayesian restoration of images. IEEE Trans. Pattern Anal. Mach. Intell. 1984, 6, 721–741. [Google Scholar] [CrossRef]
- Chan, T.; Vese, L. Active contours without edges. IEEE Trans. Image Process. 2001, 10, 266–277. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.; Vecchi, M. Optimization by simulated annealing. Science 1983, 4598, 671–680. [Google Scholar] [CrossRef]
- Douglas, D.; Peucker, T. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartogr. Int. J. Geogr. Inf. Geovis. 1973, 10, 112–122. [Google Scholar] [CrossRef]
- Liu, C.; Yang, J.; Xu, F. Bridge detection in polarimetric SAR images based on water area tracing. J. Tsinghua Univ. 2017, 57, 1303–1309. [Google Scholar]
















| - | Scene | Sensor | Size | Resolution (m × m) | UTC | AOI (°) |
|---|---|---|---|---|---|---|
| 1 | Singapore | RADARSAT-2 | 19 January 2013 11:31:08 | 47.3 | ||
| 2 | Lingshui | RADARSAT-2 | 12 June 2014 10:49:49 | 37.2 | ||
| 3 | Singapore | TerraSAR-X | 10 March 2014 11:07:06 | 34.7 |
| Data | Targets | Correct | Pd (%) | False Alarm | Pf (%) |
|---|---|---|---|---|---|
| 1 | 16 | 13 | 81.3 | 1 | 7.14 |
| 2 | 5 | 5 | 100 | 0 | 0 |
| 3 | 11 | 10 | 90.9 | 1 | 9.09 |
| Data | Targets | Correct | Pd (%) | False Alarm | Pf (%) |
|---|---|---|---|---|---|
| 1 | 16 | 12 | 75 | 68 | 85 |
| 2 | 5 | 5 | 100 | 16 | 76.2 |
| 3 | 11 | 10 | 90.9 | 57 | 85 |
| Data | Targets | Correct | Pd (%) | False Alarm | Pf (%) |
|---|---|---|---|---|---|
| Polar | 16 | 13 | 81.3 | 1 | 7.14 |
| HH | 16 | 10 | 62.5 | 9 | 47.3 |
| HV | 16 | 8 | 50.0 | 5 | 38.5 |
| VV | 16 | 4 | 25.0 | 18 | 81.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Yang, J.; Ou, J.; Fan, D. Offshore Bridge Detection in Polarimetric SAR Images Based on Water Network Construction Using Markov Tree. Remote Sens. 2022, 14, 3888. https://doi.org/10.3390/rs14163888
Liu C, Yang J, Ou J, Fan D. Offshore Bridge Detection in Polarimetric SAR Images Based on Water Network Construction Using Markov Tree. Remote Sensing. 2022; 14(16):3888. https://doi.org/10.3390/rs14163888
Chicago/Turabian StyleLiu, Chun, Jian Yang, Jianghong Ou, and Dahua Fan. 2022. "Offshore Bridge Detection in Polarimetric SAR Images Based on Water Network Construction Using Markov Tree" Remote Sensing 14, no. 16: 3888. https://doi.org/10.3390/rs14163888
APA StyleLiu, C., Yang, J., Ou, J., & Fan, D. (2022). Offshore Bridge Detection in Polarimetric SAR Images Based on Water Network Construction Using Markov Tree. Remote Sensing, 14(16), 3888. https://doi.org/10.3390/rs14163888