

Confidence and Error Analyses of the Radiosonde and Ka-Wavelength Cloud Radar for Detecting the Cloud Vertical Structure
Abstract
:
1. Introduction
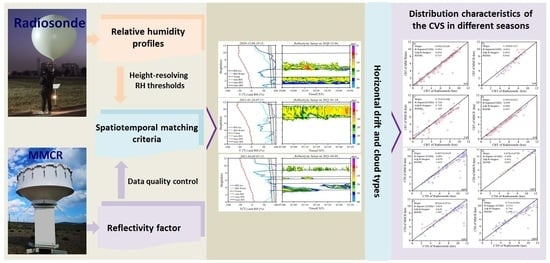
2. Method
2.1. Cloud Detection by Radiosonde
2.2. Cloud Detection by MMCR
2.3. Spatiotemporal Matching Criteria
3. Typical Case Analysis
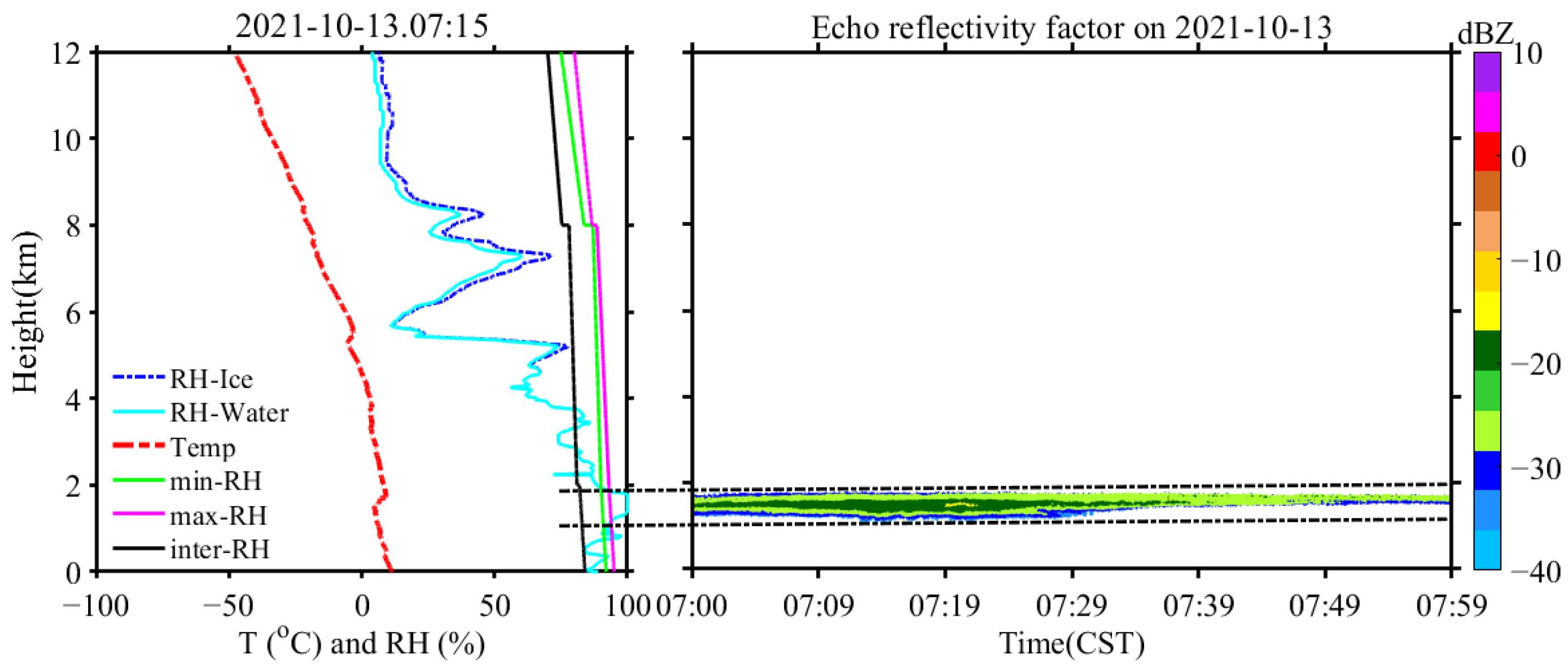
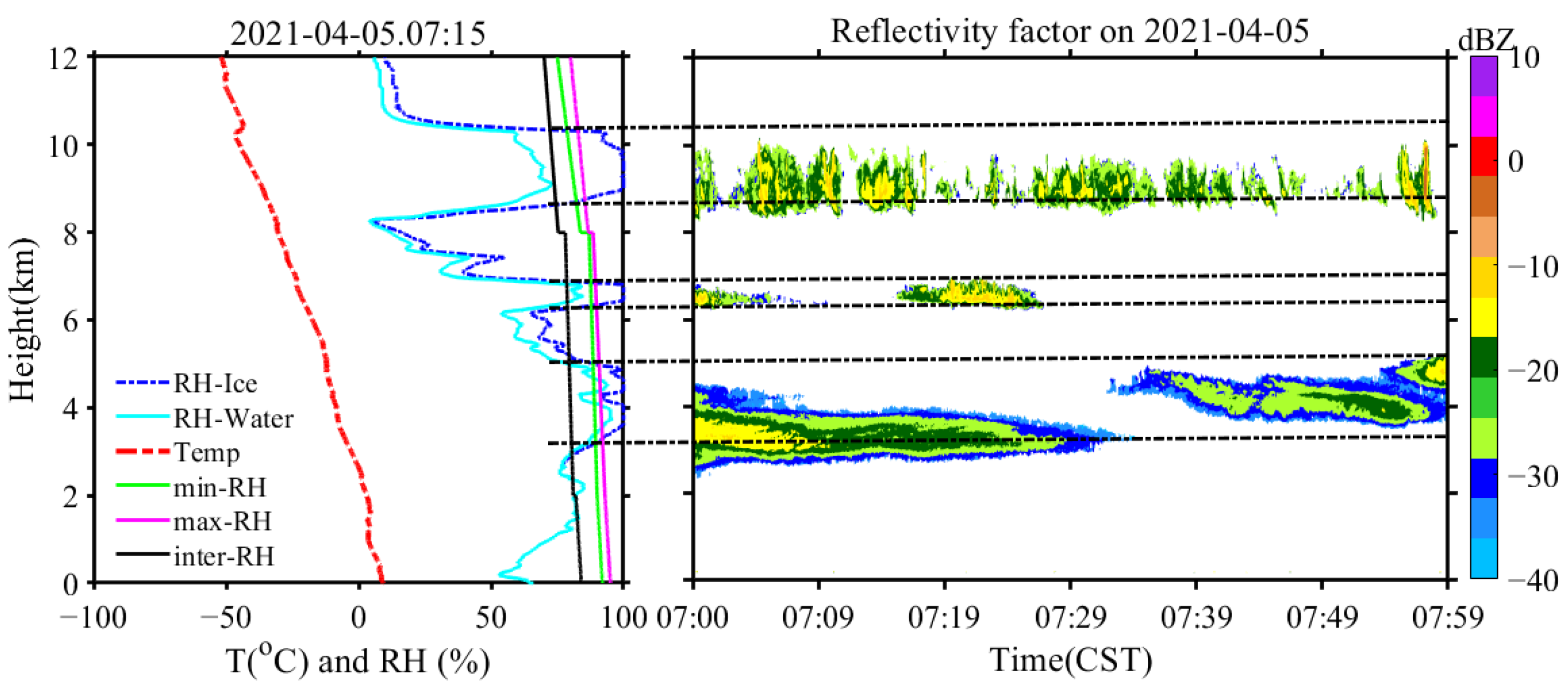
3.1. Case 1: CVSs of Low, Middle, and High Clouds
3.2. Case 2: Two-Layer Cloud
3.3. Case 3: Three-Layer Cloud
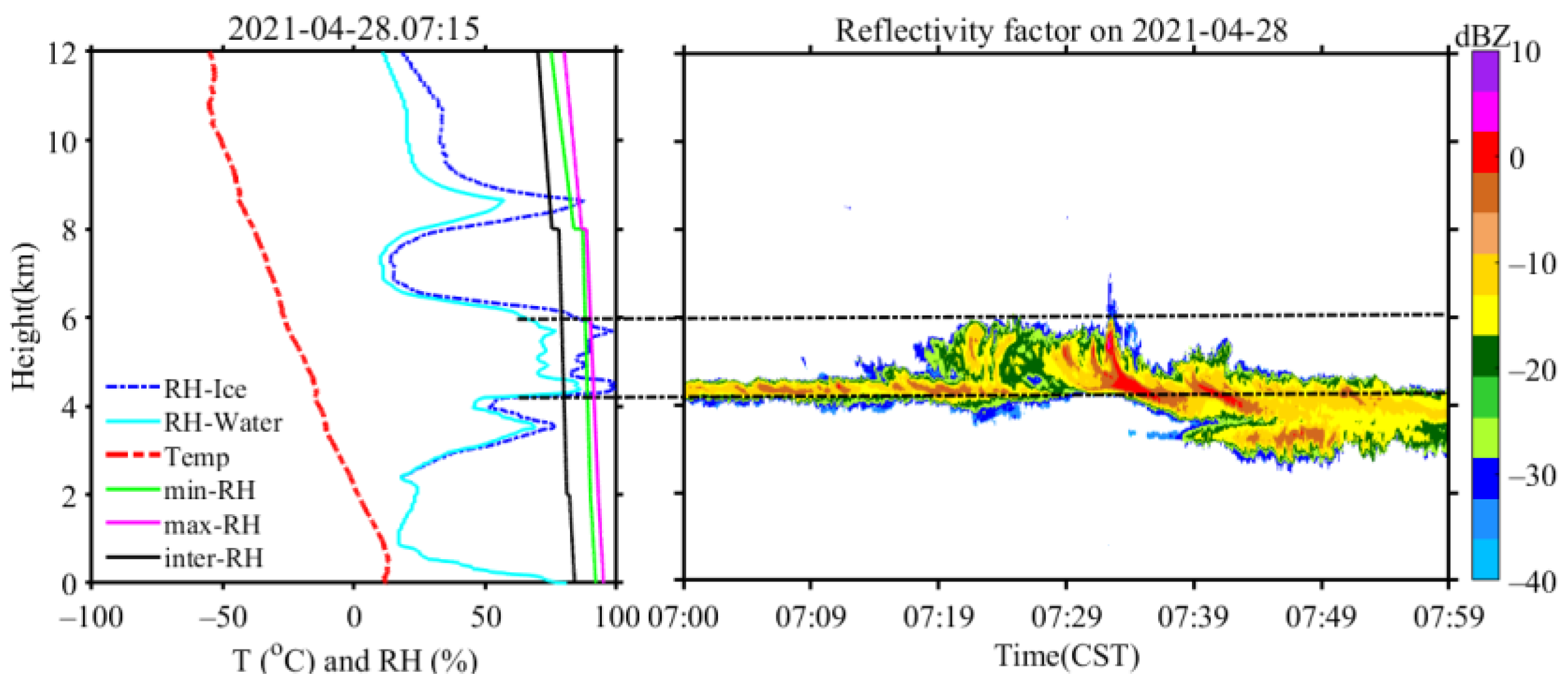
3.4. Case 4: Precipitation Cloud
3.5. Case 5: Non-Precipitation Cloud
4. Analysis and Discussion of CVS Results
4.1. Observation Sample Statistics
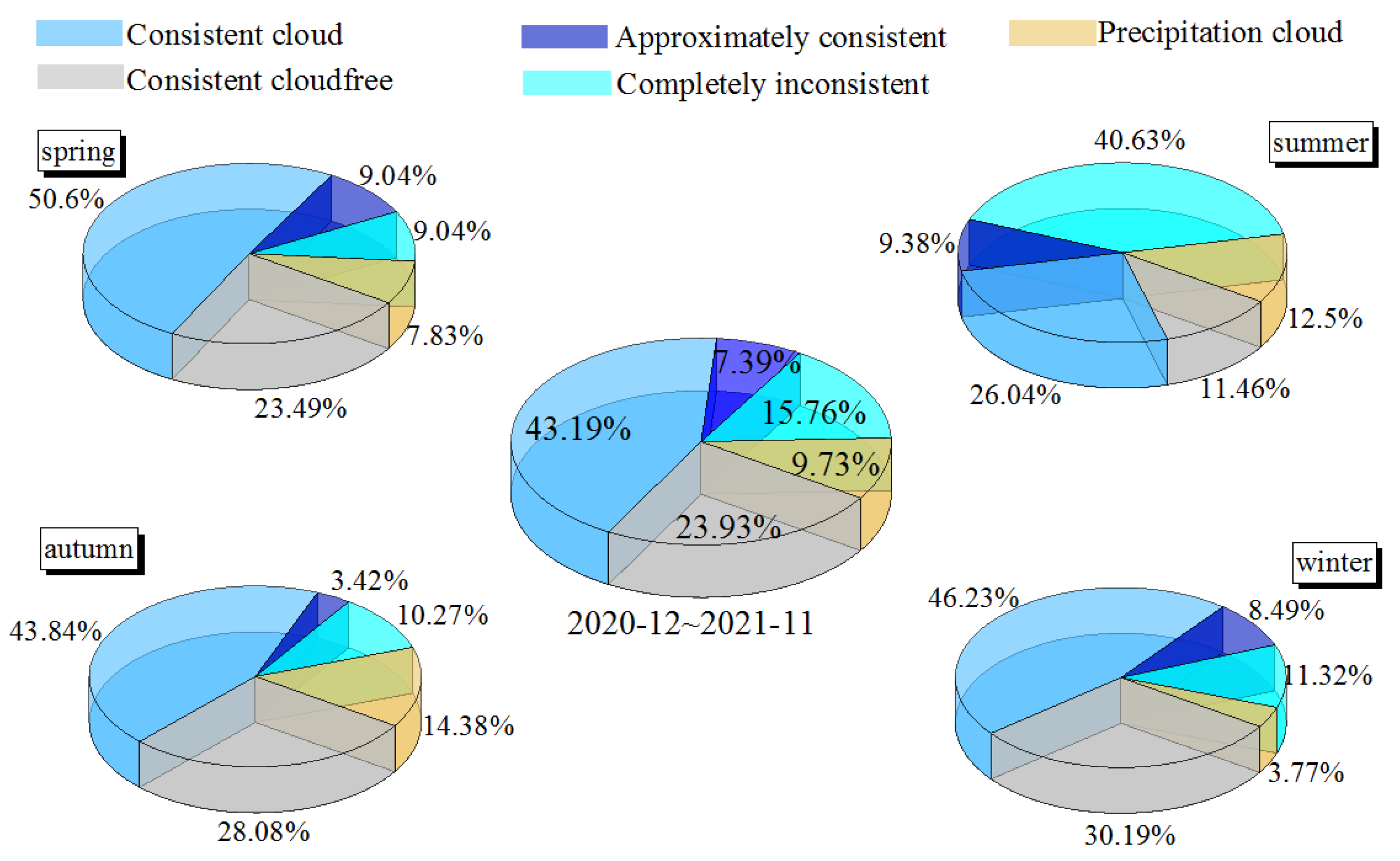
4.2. Distribution Characteristics of the CVS
4.2.1. Cloud Layer Distribution
4.2.2. Seasonal Distribution of Cloud Base and Top Heights
4.2.3. Annual Distributions of Cloud Base and Top Heights
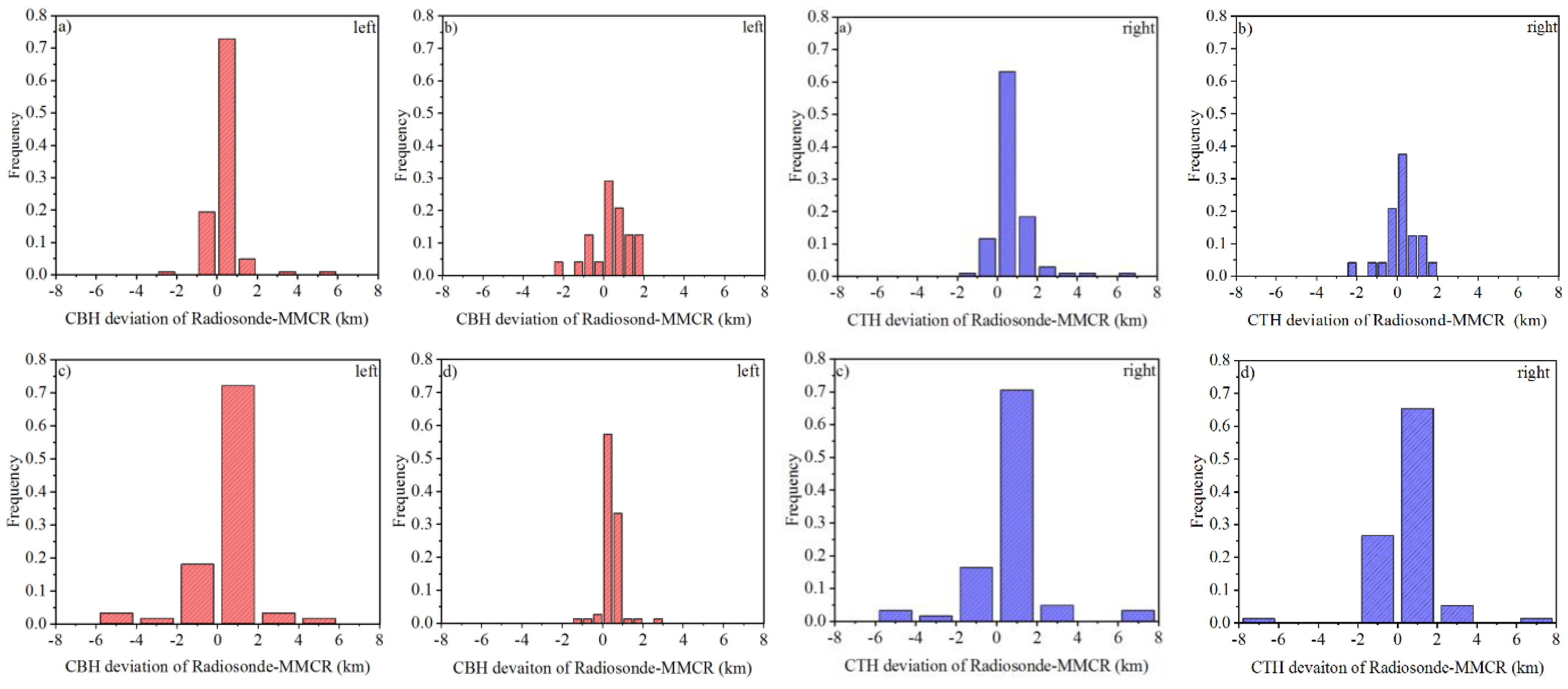
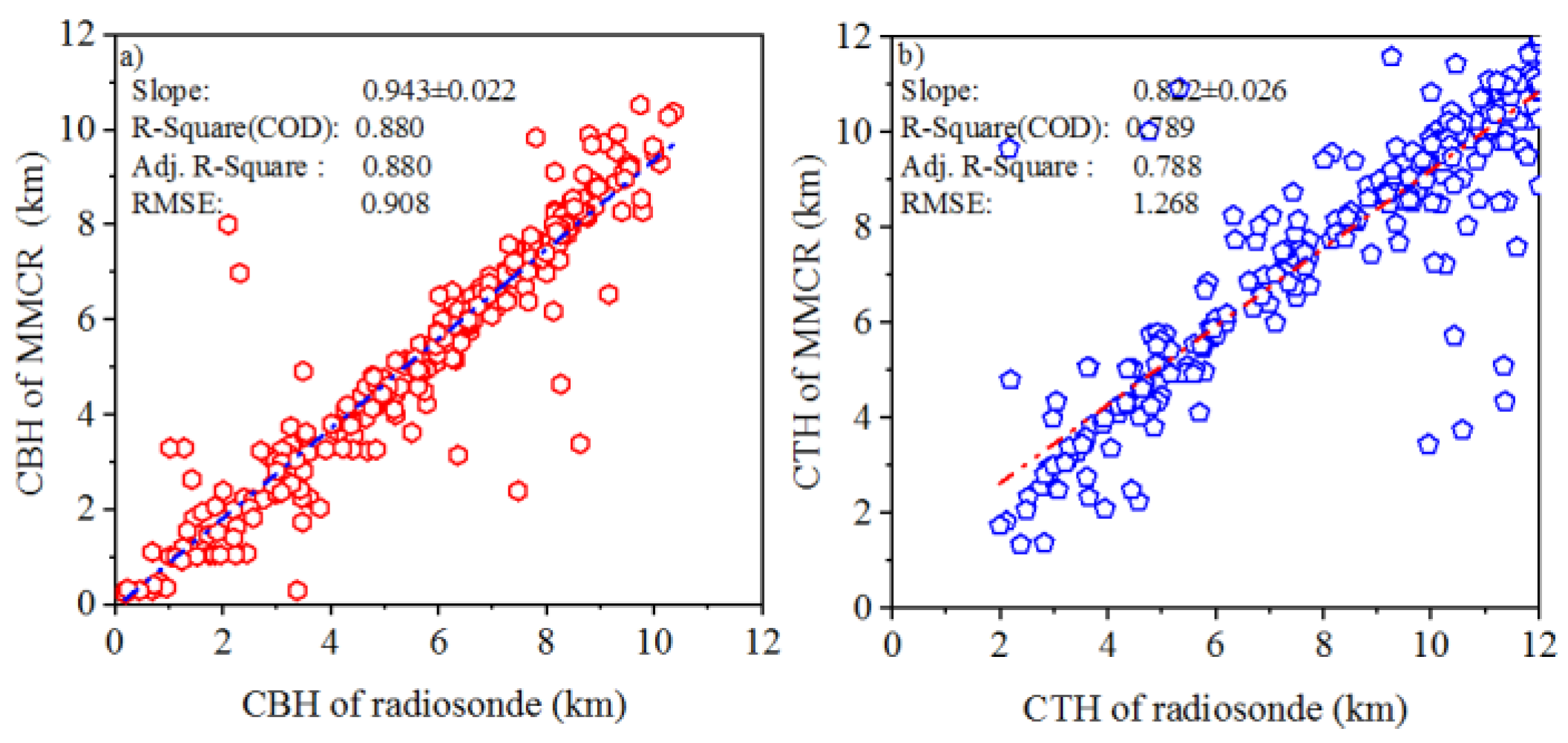
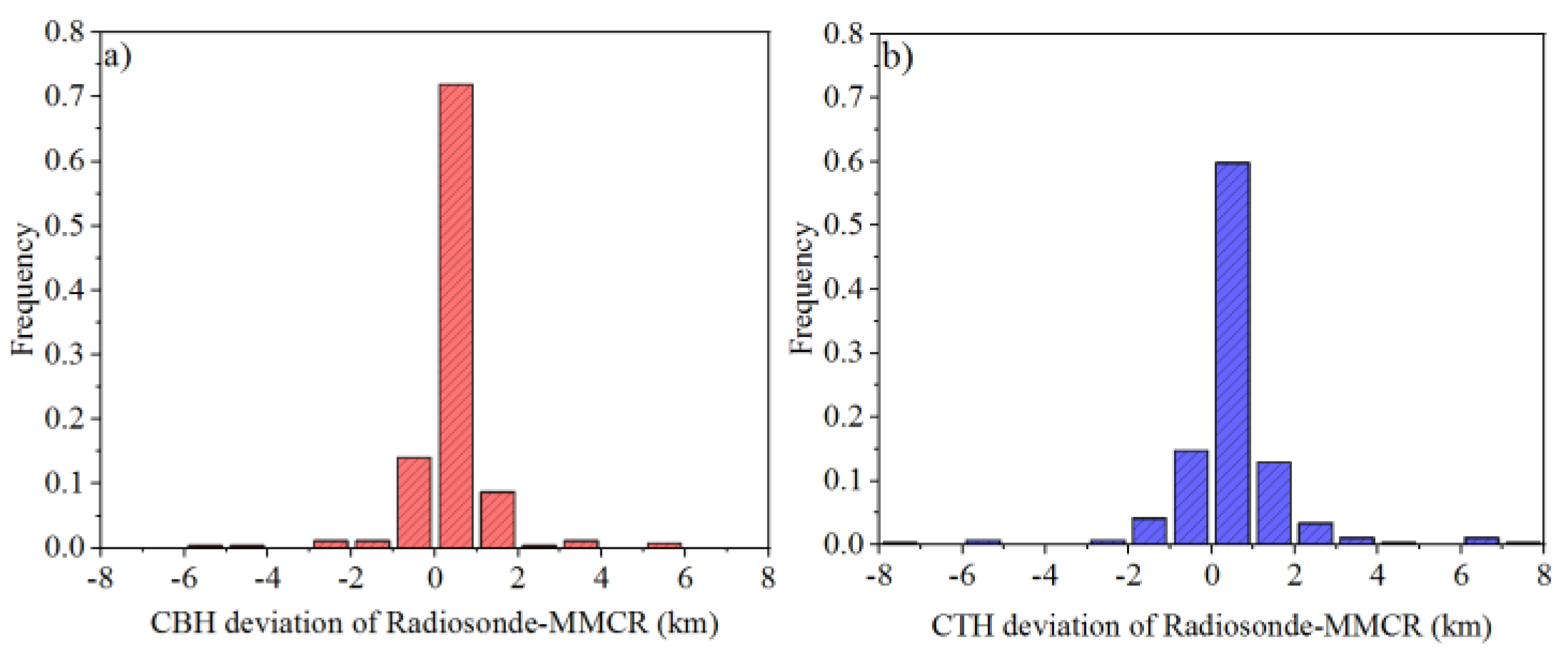
5. Deviation Analysis of Cloud Top Height
- Attenuation and limited sensitivity of MMCR
- 2.
- Radiosonde humidity sensor delay
- 3.
- Drift in the rising trajectory of the radiosonde
6. Statistics and Analysis of the CVS Characteristics in the Xi’an Area
7. Conclusions
- The adjusted RH threshold method effectively identified cloud information from the RH profiles recorded by the GTS11 radiosonde in Xi’an. Spatiotemporal matching criteria can effectively reduce the detection deviation of the CVSs caused by the horizontal drift of the radiosonde.
- The GTS11 radiosonde and MMCR results showed high consistency in the observation of the CVSs of low-level clouds. However, with the increase in the cloud height, the frequency of clouds detected by the radiosonde became higher than that detected by the MMCR.
- In summer, large-scale clouds were distributed at high heights, and the radiosonde experienced a wide range of wind directions and a low wind speed during the rising process, resulting in a low horizontal drift. Therefore, the CVS results of the radiosonde and the MMCR were similar. The cloud height distributions in spring and autumn were similar, causing the wind speed and direction distributions of the radiosonde on the rising trajectory to be similar. Therefore, the drift was approximately the same, whereas the cloud size in autumn was small, and the correlation between the CVS observations by the radiosonde and the MMCR was lower than that observed in summer. In winter, the concentrated wind direction and high wind speed caused a large drift. However, the cloud height was low and its size was large. Thus, there was no significant difference between the CVSs detected by the two devices. Therefore, when using the RH threshold method to identify a CVS from radiosonde RH profiles, not only the horizontal drift of the radiosonde, but also the cloud type and cloud height, should be considered.
- In different seasons, the cloud types, cloud height, horizontal drift of radiosonde, and the delay of humidity sensor were the main factors affecting the accuracy of the radiosonde in detecting the CVSs. Although the MMCR was subject to some limitations when detecting precipitating clouds and high-level cirrus clouds, it could remove near-surface moist layers with no clouds. The CVSs distribution and change characteristics examined in this study can provide better support for the numerical model analysis and study of climate change characteristics in Xi’an.
- Using the RH threshold method to identify CVSs from radiosonde RH profiles from 2019 to 2021 in Xi’an showed that the cloud-free condition was the highest (34.36%) in winter, and precipitation clouds appeared most frequently (12.99%) in autumn. The frequencies of two-layer (22.10%) and three-layer (5.23%) clouds were the highest in summer. The average CTH and CBH did not fluctuate significantly with the changing of the years. The average CTH and CBH fluctuated in the ranges of 7–10 km and of 3–5 km, respectively.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Analysis of the Radiosonde Delay


References
- Wang, J.; Rossow, W.B. Determination of cloud vertical structure from upper-air observations. J. Appl. Meteorol. Clim. 1995, 34, 2243–2258. [Google Scholar] [CrossRef]
- Wang, J.; Rossow, W.B. Effects of cloud vertical structure on atmospheric circulation in the GISS GCM. J. Clim. 1998, 11, 3010–3029. Available online: https://www.jstor.org/stable/26244244 (accessed on 2 August 2022). [CrossRef]
- Webster, P.J.; Stephens, G.L. Cloud-radiation interaction and the climate problem. In The Global Climate; Houghton, J.L., Ed.; Cambridge University Press: Cambridge, UK, 1984; pp. 63–78. Available online: http://hdl.handle.net/102.100.100/279854?index=1 (accessed on 2 August 2022).
- Dong, X.; Minnis, P.; Xi, B. A climatology of midlatitude continental clouds from the ARM SGP Central Facility: Part I: Low-level cloud macrophysical, microphysical, and radiative properties. J. Clim. 2005, 18, 1391–1410. [Google Scholar] [CrossRef]
- Stephens, G.L.; Vane, D.G.; Boain, R.J.; Mace, G.G.; Sassen, K.; Wang, Z.; Illingworth, A.J.; O’Connor, E.J.; Rossow, W.B.; Durden, S.L.; et al. The CloudSat mission and the A-Train: A new dimension of space-based observations of clouds and precipitation. Bull. Am. Meteorol. Soc. 2002, 83, 1771–1790. [Google Scholar] [CrossRef]
- Zhang, L.; Dong, X.; Kennedy, A.; Xi, B.; Li, Z. Evaluation of NASA GISS post-CMIP5 single column model simulated clouds and precipitation using ARM Southern Great Plains observations. Adv. Atmos. Sci. 2017, 34, 306–320. [Google Scholar] [CrossRef]
- Wang, J.; Rossow, W.B.; Uttal, T.; Rozendaal, M. Variability of cloud vertical structure during ASTEX observed from a combination of rawinsonde, radar, ceilometer, and satellite. Mon. Weather. Rev. 1999, 127, 2484–2502. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Z.H.; Cao, X.Z. Consistency analysis for cloud vertical structure derived from millimeter cloud radar and radiosonde profiles. Acta Meteorol. Sin. 2016, 74, 815–826. [Google Scholar] [CrossRef]
- Zhang, Y.P.; Zhang, W.X.; Lü, D.R.; Bi, Y.H. Cloud top heights measured by METOP-A IASI instrument compared with ground-based cloud radar. Chin. J. Atmos. Sci. 2014, 38, 874–884. [Google Scholar] [CrossRef]
- Garrett, T.J.; Zhao, C. Ground-based remote sensing of thin clouds in the Arctic. Atmos. Meas. Tech. 2013, 6, 1227–1243. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Z.; Cao, X.; Tao, F. Comparison of cloud top heights derived from FY-2 meteorological satellites with heights derived from ground-based millimeter wavelength cloud radar. Atmos. Res. 2018, 199, 113–127. [Google Scholar] [CrossRef]
- Hamada, A.; Nishi, N.; Iwasaki, S.; Ohno, Y.; Kumagai, H.; Okamoto, H. Cloud type and top height estimation for tropical upper-tropospheric clouds using GMS-5 splitwindow measurements combined with cloud radar measurements. Sci. Online Lett. Atmos. 2008, 4, 57–60. [Google Scholar] [CrossRef]
- Chernykh, I.V.; Eskridge, R.E. Determination of cloud amount and level from radiosonde soundings. J. Appl. Meteorol. Clim. 1996, 35, 1362–1369. [Google Scholar] [CrossRef]
- Wang, J.; Rossow, W.B.; Zhang, Y. Cloud vertical structure and its variations from a 20-yr global rawinsonde dataset. J. Clim. 2000, 13, 3041–3056. [Google Scholar] [CrossRef]
- Guo, J.; Miao, Y.; Zhang, Y.; Liu, H.; Li, Z.; Zhang, W.; He, J.; Lou, M.; Yan, Y.; Bian, L.; et al. The climatology of planetary boundary layer height in China derived from radiosonde and reanalysis data. Atmos. Chem. Phys. 2016, 16, 13309–13319. [Google Scholar] [CrossRef]
- Wang, J.; Carlson, D.J.; Parsons, D.B.; Hock, T.F.; Lauritsen, D.; Cole, H.L.; Beierle, K.; Chamberlain, E. Performance of operational radiosonde humidity sensors in direct comparison with a chilled mirror dew-point hygrometer and its climate implication. Geophys. Res. Lett. 2003, 30, 1860–1863. [Google Scholar] [CrossRef]
- Rossow, W.B.; Zhang, Y.; Wang, J. A statistical model of cloud vertical structure based on reconciling cloud layer amounts inferred from satellites and radiosonde humidity profiles. J. Clim. 2005, 18, 3587–3605. [Google Scholar] [CrossRef]
- Costa-Surós, M.; Calbó, J.; González, J.A.; Long, C.N. Comparing the cloud vertical structure derived from several methods based on measured atmospheric profiles and active surface measurements. Atmos. Chem. Phys. 2013, 13, 14405–14445. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Li, Z.; Fan, X.; Peng, L.; Yu, Y.; Cribb, M. Analysis of cloud layer structure in Shouxian, China using RS92 radiosonde aided by 95 GHz cloud radar. J. Geophys. Res. Atmos. 2010, 115, D00K30. [Google Scholar] [CrossRef]
- Guo, J.; Zhang, X.; Che, H.; Gong, S.; An, X.; Cao, C.; Guang, J.; Zhang, H.; Wang, Y.; Zhang, X.; et al. Correlation between PM concentrations and aerosol optical depth in eastern China. Atmos. Environ. 2009, 43, 5876–5886. [Google Scholar] [CrossRef]
- Li, Z.; Guo, J.; Ding, A.; Liao, H.; Liu, J.; Sun, Y.; Wang, T.; Xue, H.; Zhang, H.; Zhu, B. Aerosol and boundary-layer interactions and impact on air quality. Natl. Sci. Rev. 2017, 4, 810–833. [Google Scholar] [CrossRef]
- Chen, D.; Guo, J.; Wang, H.; Li, J.; Min, M.; Zhao, W.; Yao, D. The cloud top distribution and diurnal variation of clouds over East Asia: Preliminary results from Advanced Himawari Imager. J. Geophys. Res. Atmos. 2018, 123, 3724–3739. [Google Scholar] [CrossRef]
- Alduchov, O.A.; Eskridge, R.E. Improved Magnus form approximation of saturation vapor pressure. J. Appl. Meteorol. 1996, 35, 601–609. [Google Scholar] [CrossRef]
- Luke, E.P.; Kollias, P.; Johnson, K.L.; Clothiaux, E.E. A technique for the automatic detection of insect clutter in cloud radar returns. J. Atmos. Ocean. Technol. 2008, 25, 1498–1513. [Google Scholar] [CrossRef]
- Shupe, M.D.; Kollias, P.; Poellot, M.; Eloranta, E. On deriving vertical air motions from cloud radar Doppler spectra. J. Atmos. Ocean. Technol. 2008, 25, 547–557. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhang, Y.; Li, B.; Li, L.; Feng, J.; Jia, S.; Lv, S.; Tao, F.; Guo, J. Cloud-base and cloud-top heights determined from a ground-based cloud radar in Beijing, China. Atmos. Environ. 2019, 201, 381–390. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, C.; Dong, Z.; Li, Z.; Hu, S.; Chen, T.; Tao, F.; Wang, Y. Improved retrieval of cloud base heights from ceilometer using a non-standard instrument method. Atmos. Res. 2018, 202, 148–155. [Google Scholar] [CrossRef]
- Borg, L.A.; Holz, R.E.; Turner, D.D. Investigating cloud radar sensitivity to optically thin cirrus using collocated Raman lidar observations. Geophys. Res. Lett. 2011, 38, 387–404. [Google Scholar] [CrossRef]
- Dong, X.; Xi, B.; Crosby, K.; Long, C.N.; Stone, R.S.; Shupe, M.D. A 10 year climatology of Arctic cloud fraction and radiative forcing at Barrow, Alaska. J. Geophys. Res. 2010, 115, D17212. [Google Scholar] [CrossRef]
- Zhou, X.; Kollias, P.; Lewis, E.R. Clouds, precipitation, and marine boundary layer structure during the MAGIC field campaign. J. Clim. 2015, 28, 2420–2442. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, X.; Chen, H. A comparison of cloud layers from ground and satellite active remote sensing at the Southern Great Plains ARM site. Adv. Atmos. Sci. 2017, 34, 347–359. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measuring Performance | Temperature (°C) | Pressure (hPa) | Relative Humidity (%) |
|---|---|---|---|
| Measurement span | −90–50 | 1060–5 | 0–100 |
| Effective measurement span | −80–50 | 1050–10 | 10–90 |
| allowance error | Δ(T) ≤ 0.3 | Pressure ≥ 500 Δ(P) ≤ 2 Pressure < 500 Δ(P) ≤ 1 | Δ(RH) ≤ 5 |
| Height Range (km) | Relative Humidity Threshold (%) | ||
|---|---|---|---|
| Min RH | Max RH | Inter-RH | |
| 0–2 | 92–90 | 95–93 | 84–82 |
| 2–6 | 90–88 | 93–90 | 82–78 |
| 6–12 | 86.2–72.5 | 87.5–77.5 | 75.5–67.5 |
| Season | Month | Sample Size | Cloud-Free Sample Size/Frequency | Precipitation Cloud Sample Size/Frequency | One-Layer Cloud Sample Size/Frequency | Two-Layer Cloud Sample Size/Frequency | Three-Layer Cloud Sample Size/Frequency | Four-Layer Cloud Sample Size/Frequency |
|---|---|---|---|---|---|---|---|---|
| Spring | Mar, Apr, May | 510 | 153, 30.00% | 51, 10.0% | 224, 43.90% | 71, 13.90% | 10, 1.96% | 1, 0.19% |
| Summer | Jun, Jul, Aug | 525 | 116, 22.10% | 62, 11.81% | 200, 38.10% | 116, 22.10% | 28, 5.23% | 3, 0.57% |
| Autumn | Sep, Oct, Nov | 531 | 169, 31.83% | 69, 12.99% | 179, 33.71% | 98, 18.46% | 12, 2.26% | 4, 0.75% |
| Winter | Dec, Jan, Feb | 521 | 179, 34.36% | 28, 5.37% | 232, 44.53% | 70, 13.44% | 10, 1.92% | 2, 0.38% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Y.; Di, H.; Liu, Y.; Cheng, D.; Chen, N.; Yan, Q.; Hua, D. Confidence and Error Analyses of the Radiosonde and Ka-Wavelength Cloud Radar for Detecting the Cloud Vertical Structure. Remote Sens. 2022, 14, 4462. https://doi.org/10.3390/rs14184462
Yuan Y, Di H, Liu Y, Cheng D, Chen N, Yan Q, Hua D. Confidence and Error Analyses of the Radiosonde and Ka-Wavelength Cloud Radar for Detecting the Cloud Vertical Structure. Remote Sensing. 2022; 14(18):4462. https://doi.org/10.3390/rs14184462
Chicago/Turabian StyleYuan, Yun, Huige Di, Yuanyuan Liu, Danmin Cheng, Ning Chen, Qing Yan, and Dengxin Hua. 2022. "Confidence and Error Analyses of the Radiosonde and Ka-Wavelength Cloud Radar for Detecting the Cloud Vertical Structure" Remote Sensing 14, no. 18: 4462. https://doi.org/10.3390/rs14184462
APA StyleYuan, Y., Di, H., Liu, Y., Cheng, D., Chen, N., Yan, Q., & Hua, D. (2022). Confidence and Error Analyses of the Radiosonde and Ka-Wavelength Cloud Radar for Detecting the Cloud Vertical Structure. Remote Sensing, 14(18), 4462. https://doi.org/10.3390/rs14184462