
Shortwave Infrared Multi-Angle Polarization Imager (MAPI) Onboard Fengyun-3 Precipitation Satellite for Enhanced Cloud Characterization


 ,
,  ,
,
Abstract
:
1. Introduction
2. MAPI Onboard FY-3 Precipitation Measurement Satellite
2.1. FY-3 Precipitation Measurement Satellite Program
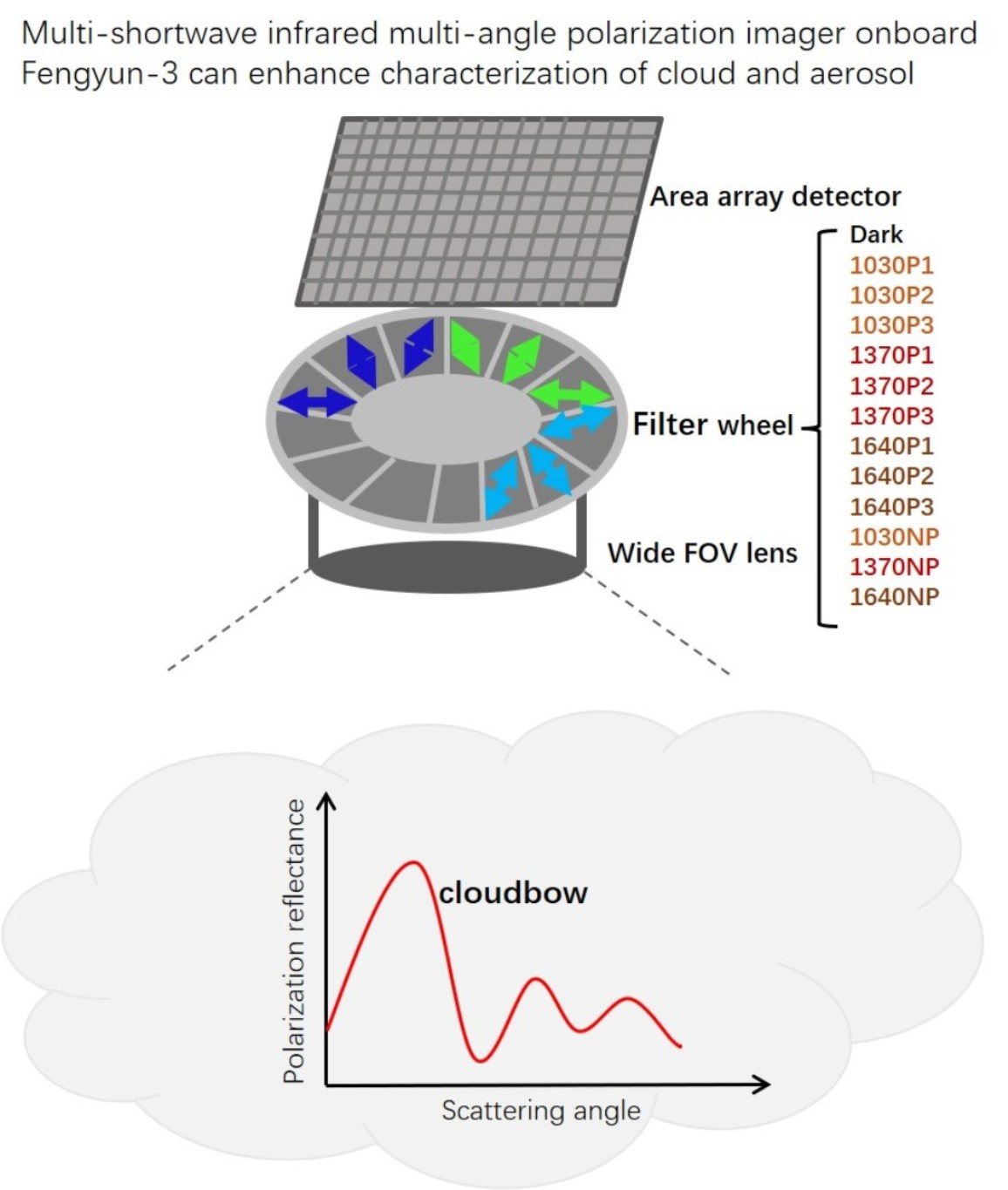
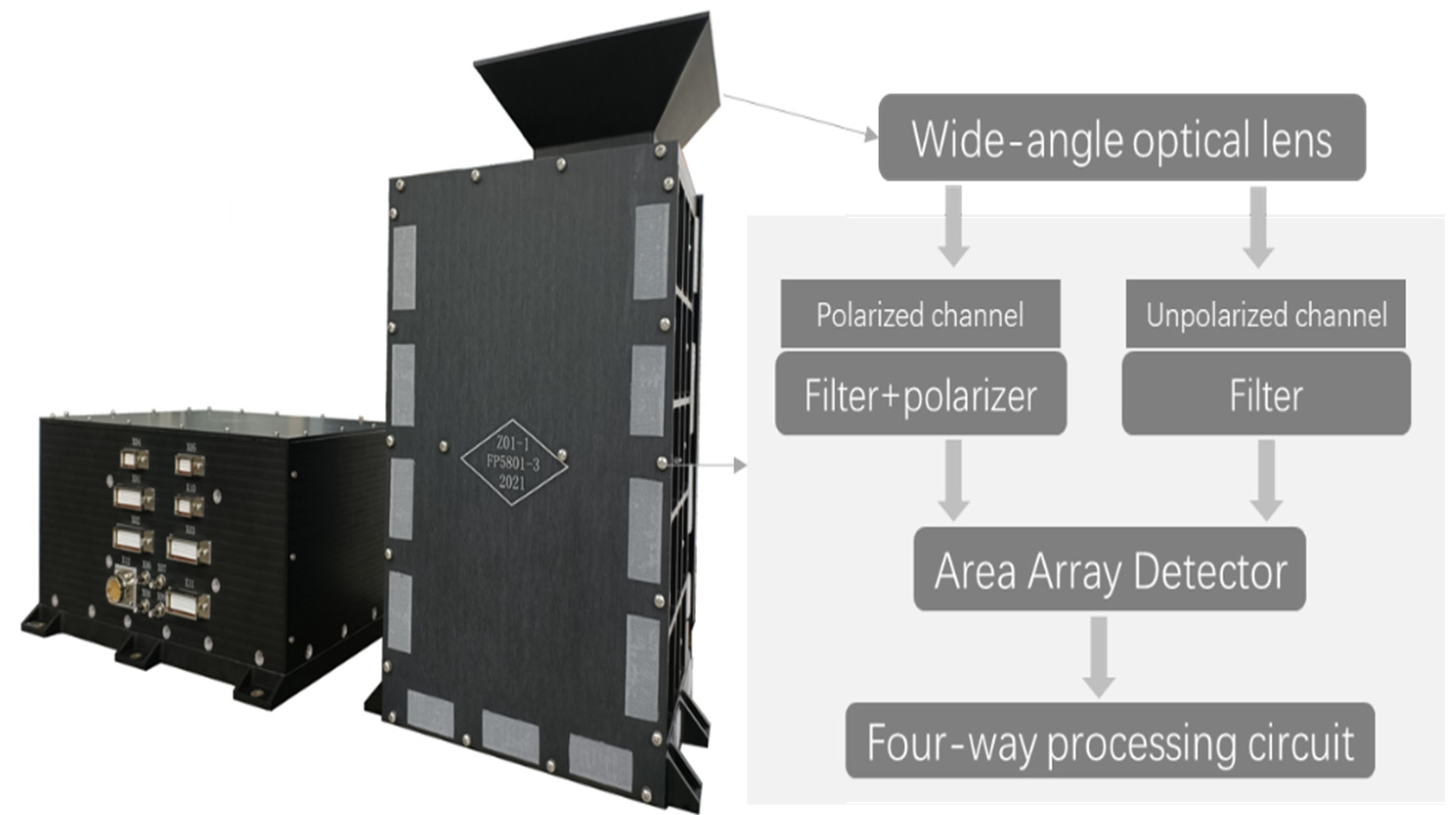
2.2. Overview of MAPI
2.3. Radiometric Model and In-Flight Calibration Strategy
3. Advantage the Observation of MAPI
3.1. Improving the Description of Cloud Characteristics
3.2. Optimizing Aerosol Characterization
3.3. Unique Advantages of Non-Sun-Synchronous Orbits
3.4. Collaborative Observation of the Optical Instruments
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. The Parameters of Aerosol Simulation Experiments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment Parameters | |
| Central wavelength/nm | 490 nm, 670 nm, 865 nm, 1030 nm, 1640 nm |
| Polarization | I, Q, U |
| Pol. Cal. Error | 0.02 |
| Rad. Cal. Error | 5% (VNIR), 5% (SWIR) |
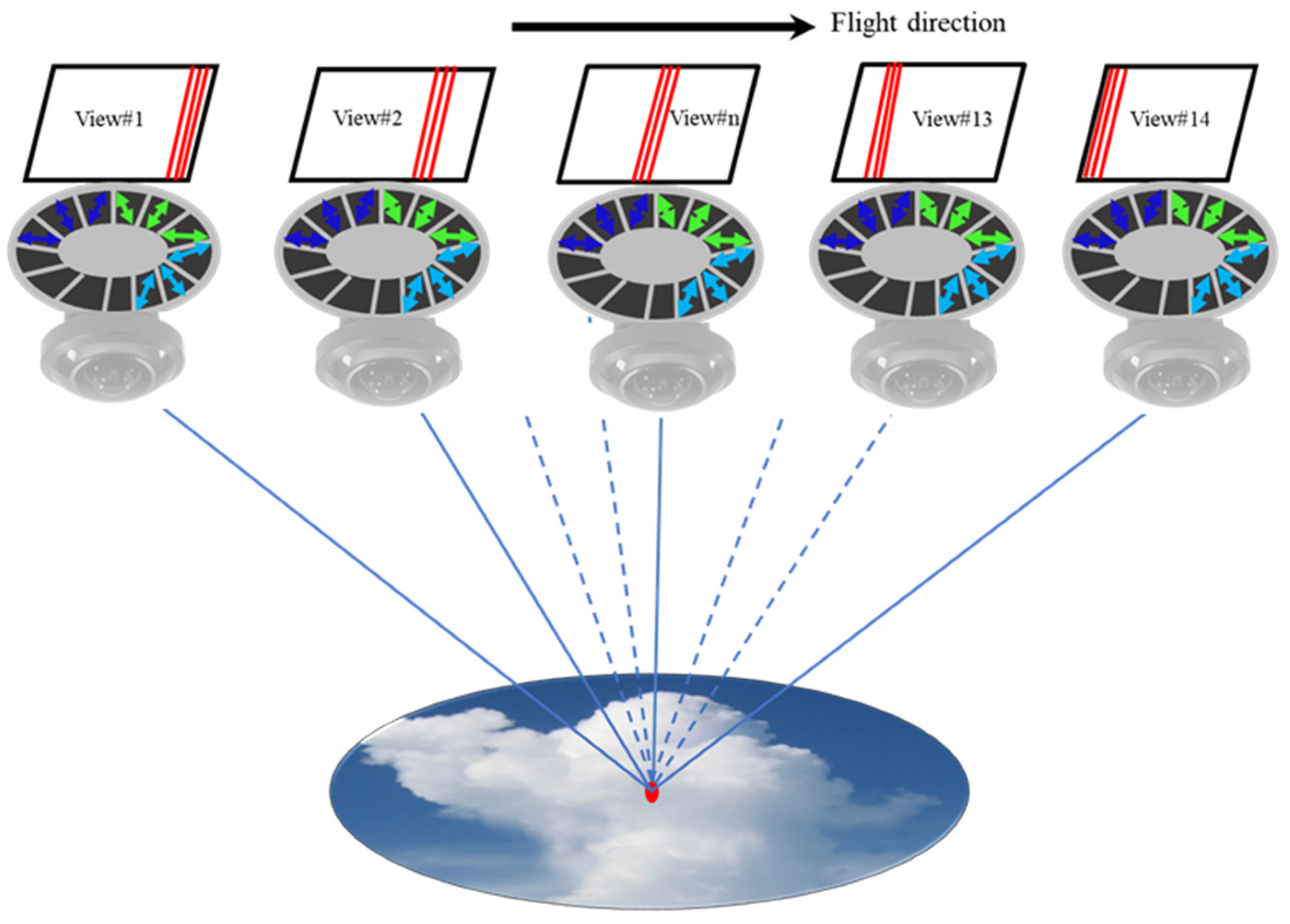
| Multi-angle | 15 |
| Scenarios | (550 nm) | (550 nm) | /μm | ||
| Fine-dominated | 1.44 (0.15) | 0.011 (0.01) | 0.21 (80%) | 0.25 (80%) | 0.8 |
| Coarse-dominated | 1.55 (0.15) | 0.003 (0.005) | 1.90 (80%) | 0.41 (80%) | 0.2 |
| Surface Type | fiso (λ) | k1 | k2 |
| Bare soil | 0.105 (0.0224), 0.276 (0.0207), 0.355 (0.2119), 0.415 (0.137), 0.446 (0.126) | 0.158 (80%) | 0.547 (80%) |
References
- Parol, F.; Buriez, J.C.; Vanbauce, C.; Riédi, J.; Doutriaux-Boucher, M.; Vesperini, M.; Sèze, G.; Couvert, P.; Viollier, M.; Bréon, F.M. Review of capabilities of multi-angle and polarization cloud measurements from POLDER. Adv. Space Res. 2004, 33, 1080–1088. [Google Scholar] [CrossRef]
- Husi, L.; Hiroshi, I.; Jerome, R.; Takashi, Y.; Laurent, C.; Anthony, J.; Takashi, M.; Miho, S. Investigation of ice particle habits to be used for ice cloud remote sensing for the GCOM-C satellite mission. Atmos. Chem. Phys. 2016, 16, 12287–12303. [Google Scholar]
- Luo, S.; Lu, C.; Liu, Y.; Gao, W.; Zhu, L.; Xu, X.; Li, J.; Guo, X. Consideration of initial cloud droplet size distribution shapes in quantifying different entrainment-mixing mechanisms. J. Geophys. Res. Atmos. 2021, 126, e2020JD034455. [Google Scholar] [CrossRef]
- Zhang, M.; Teng, S.; Di, D.; Hu, X.; Letu, H.; Min, M.; Liu, C. Information Content of Ice Cloud Properties from Multi-Spectral, -Angle and -Polarization Observations. Remote Sens. 2020, 12, 2548. [Google Scholar] [CrossRef]
- Hasekamp, O.P.; Landgraf, J. Retrieval of aerosol properties over land surfaces: Capabilities of multiple-viewing-angle intensity and polarization measurements. Appl. Opt. 2007, 46, 3332–3344. [Google Scholar] [CrossRef]
- Zhao, C.; Yang, Y.; Fan, H.; Huang, J.; Fu, Y.; Zhang, X.; Kang, S.; Cong, Z.; Letu, H.; Menenti, M. Aerosol Characteristics and Impacts on Weather and Climate over Tibetan Plateau. Natl. Sci. Rev. 2020, 7, 492–495. [Google Scholar] [CrossRef]
- Mishchenko, M.; Travis, L. Satellite retrieval of aerosol properties over the ocean using polarization as well as intensity of reflected sunlight. J. Geophys. Res. 1997, 102, 16989–17013. [Google Scholar] [CrossRef]
- Dubovik, O.; Li, Z.; Mishchenko, M.I.; Tanré, D.; Karol, Y.; Bojkov, B.; Cairns, B.; Diner, D.J.; Espinosa, W.R.; Goloub, P.; et al. Polarimetric remote sensing of atmospheric aerosols: Instruments, methodologies, results, and perspectives. J. Quant. Spectrosc. Radiat. Transf. 2019, 224, 474–511. [Google Scholar] [CrossRef]
- Shang, H.; Letu, H.; Bréon, F.-M.; Riedi, J.; Ma, R.; Wang, Z.; Nakajima, T.; Wang, Z.; Chen, L. An improved algorithm of cloud droplet size distribution from POLDER polarized measurements. Remote Sens. Environ. 2019, 228, 61–74. [Google Scholar] [CrossRef]
- Li, Z.; Hou, W.; Hong, J.; Fan, C.; Wei, Y.; Liu, Z.; Lei, X.; Qiao, Y.; Hasekamp, O.P.; Fu, G.; et al. The polarization crossfire (PCF) sensor suite focusing on satellite remote sensing of fine particulate matter PM2. 5 from space J. Quant. Spectrosc. Radiat. Transf. 2022, 286, 108217. [Google Scholar] [CrossRef]
- Levis, A.; Davis, A.B.; Schechner, Y.Y.; Loveridge, J. 3D cloud tomography and droplet size retrieval from multi-angle polarimetric imaging of scattered sunlight from above. In Proceedings of the SPIE Polarization Science and Remote Sensing X, San Diego, CA, USA, 1 August 2021; p. 11833-05. [Google Scholar]
- Li, J.; Ma, J.; Li, C.; Wang, Y.; Li, Z.; Hong, J. Multi-information collaborative cloud identification algorithm in Gaofen-5 Directional Polarimetric Camera imagery. J. Quant. Spectrosc. Radiat. Transf. 2021, 261, 107439. [Google Scholar] [CrossRef]
- Leroy, M.; Deuzé, J.L.; Bréon, F.M.; Hautecoeur, O.; Herman, M.; Buriez, J.C.; Tanre, D.; Bouffiès, S.; Chazette, P.; Roujean, J.L. Retrieval of atmospheric properties and surface bidirectional reflectances over land from POLDER/ADEOS. J. Geophys. Res. 1997, 102, 17023–17037. [Google Scholar] [CrossRef]
- Fan, X.; Goloub, P.; Deuzé, J.-L.; Chen, H.; Zhang, W.; Tanré, D.; Li, Z. Evaluation of PARASOL aerosol retrieval over North East Asia. Remote Sens. Environ. 2008, 112, 697–707. [Google Scholar] [CrossRef]
- Tanré, D.; Bréon, F.M.; Deuzé, J.L.; Dubovik, O.; Ducos, F.; François, P.; Goloub, P.; Herman, M.; Lifermann, A.; Waquet, F. Remote sensing of aerosols by using polarized, directional and spectral measurements within the A-Train: The PARASOL mission. Atmos. Meas. Tech. 2011, 4, 1383–1395. [Google Scholar] [CrossRef]
- Kahn, R.A.; Gaitley, B.J.; Martonchik, J.V.; Diner, D.J.; Crean, K.A.; Holben, B. Multiangle Imaging Spectroradiometer (MISR) global aerosol optical depth validation based on 2 years of coincident Aerosol Robotic Network (AERONET) observations. J. Geophys. Res. 2005, 110, D10S04. [Google Scholar] [CrossRef]
- Fougnie, B. Improvement of the PARASOL radiometric in-flight calibration based on synergy between various methods using natural targets. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2140–2152. [Google Scholar] [CrossRef]
- Zhang, Y.; Hu, X.; Yin, D.; Gu, M. Onboard Polarization Calibration Technique of Multi-Angle Polarization Imager Based on Sun Glint from Ocean. Acta Opt. Sin. 2020, 40, 1528002. (In Chinese) [Google Scholar] [CrossRef]
- Wang, X.; Guo, Z.; Huang, Y.; Fan, H.; Li, W. A cloud detection scheme for the Chinese Carbon Dioxide Observation Satellite (TANSAT). Adv. Atmos. Sci. 2017, 34, 16–25. [Google Scholar] [CrossRef]
- Li, Z.; Hou, W.; Hong, J.; Zheng, F.; Luo, D.; Wang, J.; Gu, X.; Qiao, Y. Directional Polarimetric Camera (DPC): Monitoring aerosol spectral optical properties over land from satellite observation. J. Quant. Spectrosc. Radiat. Transf. 2018, 218, 21–37. [Google Scholar] [CrossRef]
- Fougnie, B.; Marbach, T.; Lacan, A.; Lang, R.; Schlüssel, P.; Poli, G.; Munro, R.; Couto, A.B. The multi-viewing multi-channel multi-polarisation imager—Overview of the 3MI polarimetric mission for aerosol and cloud characterization. J. Quant. Spectrosc. Radiat. Transf. 2018, 219, 23–32. [Google Scholar] [CrossRef]
- Li, H.; Zhang, L.; Shen, H.; Li, P. A variational gradient-based fusion method for visible and SWIR imagery. Photogramm. Eng. Remote Sens. 2012, 78, 947–958. [Google Scholar] [CrossRef]
- Gao, B.; Goetz, A.; Wiscombe, W. Cirrus cloud detection from airborne imaging spectrometer data using the 1.38 μm water vapor band. Geophys. Res. Lett. 1993, 20, 301–304. [Google Scholar] [CrossRef]
- Sun, L.; Mi, X.; Wei, J.; Wang, J.; Tian, X.; Yu, H.; Gan, P. A cloud detection algorithm-generating method for remote sensing data at visible to short-wave infrared wavelengths. ISPRS J. Photogramm. Remote Sens. 2017, 124, 70–88. [Google Scholar] [CrossRef]
- Min, M.; Matthias, J.; Eduardo, H.; Ana, P.; Barry, M.; Fred, M.; Samir, A. Improved MODIS aerosol retrieval using modified VIS/SWIR surface albedo ratio over urban scenes. IEEE Trans. Geosci. Remote Sens. 2010, 48, 983–1000. [Google Scholar]
- Hou, W.; Li, Z.; Wang, J.; Xu, X.; Goloub, P.; Qie, L. Improving remote sensing of aerosol microphysical properties by near-infrared polarimetric measurements over vegetated land: Information content analysis. J. Geophys. Res. Atmos. 2018, 123, 2215–2243. [Google Scholar] [CrossRef]
- Dlugach, J.M.; Mishchenko, M.I.; Veles, O.A. Applying orbital multi-angle photopolarimetric observations to study properties of aerosols in the Earth’s atmosphere: Implications of measurements in the 1.378 µm spectral channel to retrieve microphysical characteristics and composition of stratospheric aerosols. J. Quant. Spectrosc. Radiat. Transf. 2021, 261, 107483. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, L.; Xian, D.; Xu, Z. Recent progress of Fengyun meteorology satellites. Chin. J. Space Sci. 2020, 40, 788–796. [Google Scholar] [CrossRef]
- Zhang, P.; Lu, Q.; Hu, X.; Gu, S.; Yang, L.; Min, M.; Chen, L.; Xu, N.; Sun, L.; Bai, W.; et al. Latest progress of the Chinese meteorological satellite program and core data processing technologies. Adv. Atmos. Sci. 2019, 36, 1027–1045. [Google Scholar] [CrossRef]
- Gu, S.N.; Wu, Q.; Yin, H.; Shang, J.; Sun, F.; Chen, L.; Zhang, P. Analysis and prospect of precipitation detection capability of Fengyun-3 meteorological satellite. J. Mar. Meteorol. 2022, 42, 1–10. [Google Scholar]
- Bret-Dibat, T.; Andre, Y.; Laherrere, J.M. Preflight calibration of the POLDER instrument. In Proceedings of the SPIE—The International Society for Optical Engineering, San Diego, CA, USA, 29 September 1995; Volume 2553, pp. 218–231. [Google Scholar]
- Hagolle, O.; Goloub, P.; Deschamps, P.-Y.; Cosnefroy, H.; Briottet, X.; Bailleul, T.; Nicolas, J.-M.; Parol, F.; Lafrance, B.; Herman, M. Results of POLDER in-flight calibration. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1550–1566. [Google Scholar] [CrossRef]
- Toubbe, B.; Bailleul, T.; Deuze, J.L.; Goloub, P.; Hagolle, O.; Herman, M. In-flight calibration of the POLDER polarized channels using the Sun’s glitter. IEEE Trans. Geosci. Remote Sens. 1999, 37, 513–524. [Google Scholar] [CrossRef]
- Buriez, J.C.; Vanbauce, C.; Parol, F.; Goloub, P.; Herman, M.; Bonnel, B.; Fouquart, Y.; Couvert, P.; Seze, G. Cloud detection and derivation of cloud properties from POLDER. Int. J. Remote Sens. 1997, 18, 2785–2813. [Google Scholar] [CrossRef]
- Shang, H.; Letu, H.; Chen, L.; Riedi, J.; Ma, R.; Wei, L.; Labonnote, L.C.; Hioki, S.; Liu, C.; Wang, Z.; et al. Cloud thermodynamic phase detection using a directional polarimetric camera DPC. J. Quant. Spectrosc. Radiat. Transf. 2020, 253, 107–179. [Google Scholar] [CrossRef]
- Dubovik, O.; Fuertes, D.; Litvinov, P.; Lopatin, A.; Lapyonok, T.; Doubovik, I.; Xu, F.; Ducos, F.; Chen, C.; Torres, B.; et al. A Comprehensive Description of Multi—Term LSM for Applying Multiple a Priori Constraints in Problems of Atmospheric Remote Sensing: GRASP Algorithm, Concept, and Applications. Front. Remote Sens. 2021, 2, 706851. [Google Scholar] [CrossRef]









| Channel | POLDER | MAI/TG | CAPI/TanSat | DPC/GF5 | 3MI/ESP | MAPI/FY3 | Main Applications | |
|---|---|---|---|---|---|---|---|---|
| Observation mode | Area array wide angles | Area array wide angles | Line array push broom single angle | Area array wide angles | Area array wide angles | Area array wide angles | ||
| Polarized | VIS-NIR | 410 | aerosol | |||||
| 443 | aerosol | |||||||
| 490 | 490 | 490 | aerosol/cloud/surface | |||||
| 565 | 555 | surface albedo | ||||||
| 670 | 670 | 670 | 670 | 670 | aerosol | |||
| 865 | 865 | 865 | 865 | aerosol/cloud | ||||
| SWIR | 1030 | cloud/aerosol/surface | ||||||
| 1370 | 1370 | cirrus | ||||||
| 1640 | 1650 | 1640 | cloud/aerosol/surface | |||||
| 2130 | cloud/surface | |||||||
| Non-polarized | VIS-NIR | 443 | 380 | 443 | aerosol | |||
| 565 | 870 | 565 | surface albedo | |||||
| 763 | 763 | 763 | 763 | cloud/aerosol height | ||||
| 765 | 765 | 765 | 754 | cloud/aerosol height | ||||
| 910 | 910 | 910 | 910 | water vapor | ||||
| SWIR | 1020 | 1030 | cloud/aerosol/surface | |||||
| 1375 | 1370 | cirrus | ||||||
| 1640 | cloud/aerosol/surface |
| Type | Specifications |
|---|---|
| Detector | Two-dimensional InGaAs |
| Spectral wavelength | SWIR 1030 nm, 1370 nm, 1640 nm |
| Orientation of the polarizer | −60°/0°/60° |
| Polarization vector | Stokes vector I/Q/U |
| Field of view | ±40° × ±40° |
| Sub-satellite resolution | 2.96 km (@407 km) |
| Observation swath | 700 km (@407 km) |
| Dynamic range | >1 |
| Radiation measurement accuracy | >5% |
| Polarization measurement accuracy | >0.02 (@P = 1) |
| Number of angles | 14 |
| SNR | ≥600@Solar constant |
| Observation target | Cloud and Aerosol |
| Channel | Spectral Band/nm | Bandwidth/nm | Wedge Prism | Polarization |
|---|---|---|---|---|
| 1 | dark background | \ | no | no |
| 2 | 1030P1 | 30 | + | yes (+60°) |
| 3 | 1030P2 | 30 | no | yes (0°) |
| 4 | 1030P3 | 30 | - | yes (−60°) |
| 5 | 1370P1 | 50 | + | yes (+60°) |
| 6 | 1370P2 | 50 | no | yes (0°) |
| 7 | 1370P3 | 50 | - | yes (−60°) |
| 8 | 1640P1 | 50 | + | yes (+60°) |
| 9 | 1640P2 | 50 | no | yes (0°) |
| 10 | 1640P3 | 50 | - | yes (−60°) |
| 11 | 1030 | 30 | + | no |
| 12 | 1370 | 30 | no | no |
| 13 | 1640 | 50 | - | no |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhang, P.; Yin, D.; Li, Z.; Shang, H.; Xu, H.; Shang, J.; Gu, S.; Hu, X. Shortwave Infrared Multi-Angle Polarization Imager (MAPI) Onboard Fengyun-3 Precipitation Satellite for Enhanced Cloud Characterization. Remote Sens. 2022, 14, 4855. https://doi.org/10.3390/rs14194855
Wang H, Zhang P, Yin D, Li Z, Shang H, Xu H, Shang J, Gu S, Hu X. Shortwave Infrared Multi-Angle Polarization Imager (MAPI) Onboard Fengyun-3 Precipitation Satellite for Enhanced Cloud Characterization. Remote Sensing. 2022; 14(19):4855. https://doi.org/10.3390/rs14194855
Chicago/Turabian StyleWang, Haofei, Peng Zhang, Dekui Yin, Zhengqiang Li, Huazhe Shang, Hanlie Xu, Jian Shang, Songyan Gu, and Xiuqing Hu. 2022. "Shortwave Infrared Multi-Angle Polarization Imager (MAPI) Onboard Fengyun-3 Precipitation Satellite for Enhanced Cloud Characterization" Remote Sensing 14, no. 19: 4855. https://doi.org/10.3390/rs14194855
APA StyleWang, H., Zhang, P., Yin, D., Li, Z., Shang, H., Xu, H., Shang, J., Gu, S., & Hu, X. (2022). Shortwave Infrared Multi-Angle Polarization Imager (MAPI) Onboard Fengyun-3 Precipitation Satellite for Enhanced Cloud Characterization. Remote Sensing, 14(19), 4855. https://doi.org/10.3390/rs14194855