

Low-Delay and Energy-Efficient Opportunistic Routing for Maritime Search and Rescue Wireless Sensor Networks




Abstract
:
1. Introduction
- (1)
- We consider the situation where all marine nodes move in real-time, which is in line with the real scenario of maritime search and rescue.
- (2)
- A novel link connectivity metric function is proposed to predict the reliability of marine communication links, and combined with the minimum time for maintaining direct link connectivity between nodes to ensure the stability of MSR-WSNs.
- (3)
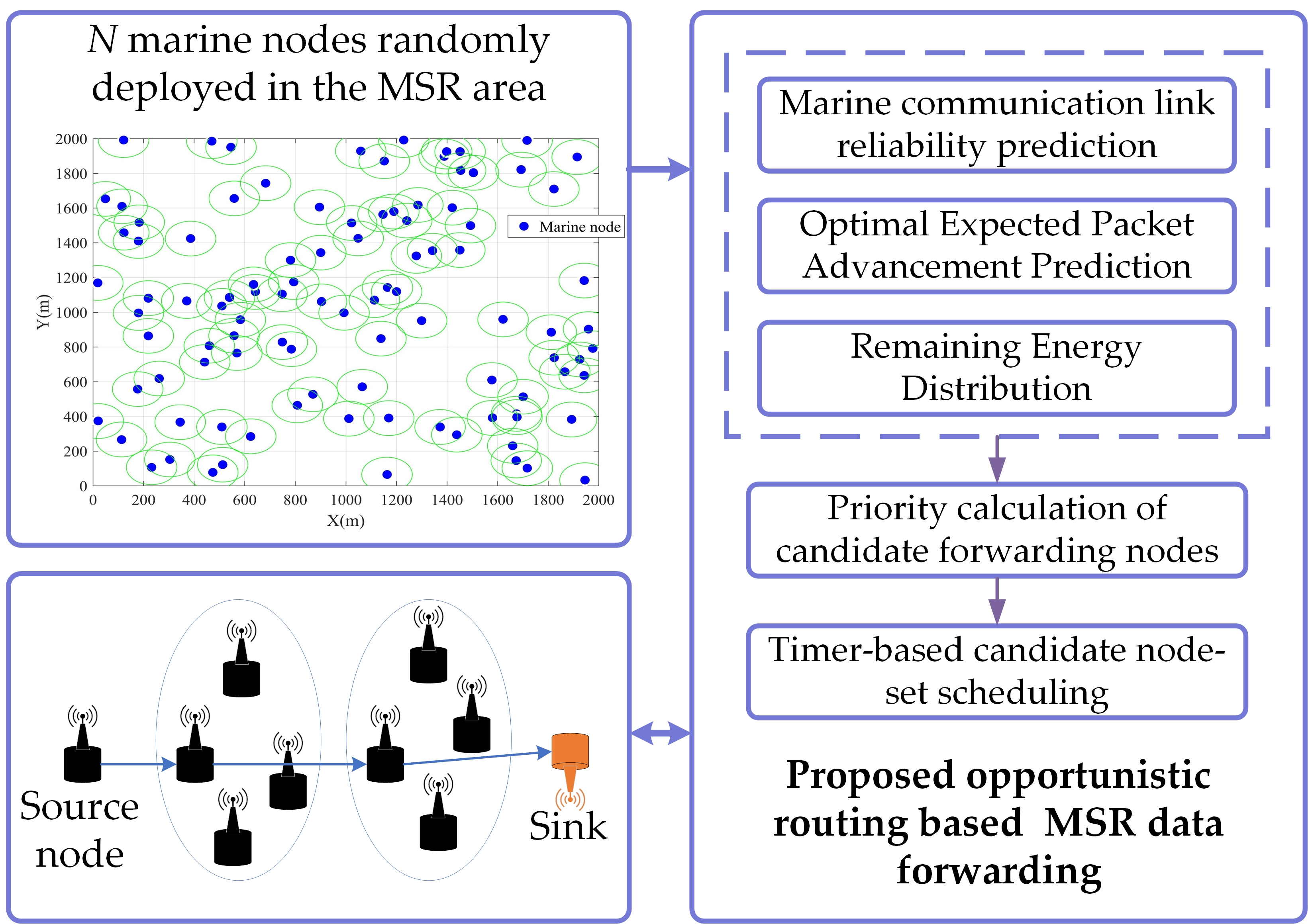
- We propose a novel candidate nodes priority calculation technique based on the link connectivity between marine nodes, the optimal expected packet advancement prediction, the distance from the sensing nodes to the sink, and the remaining energy distribution of the nodes.
- (4)
- we evaluate our proposed opportunistic routing protocol in a simulated marine environment. Computer simulation experiments validate that the proposed opportunistic routing protocol can effectively increase the data packet delivery ratio, reduce time delay, and prolong the lifetime of MSR-WSNs.
2. System Model and Problem Statement
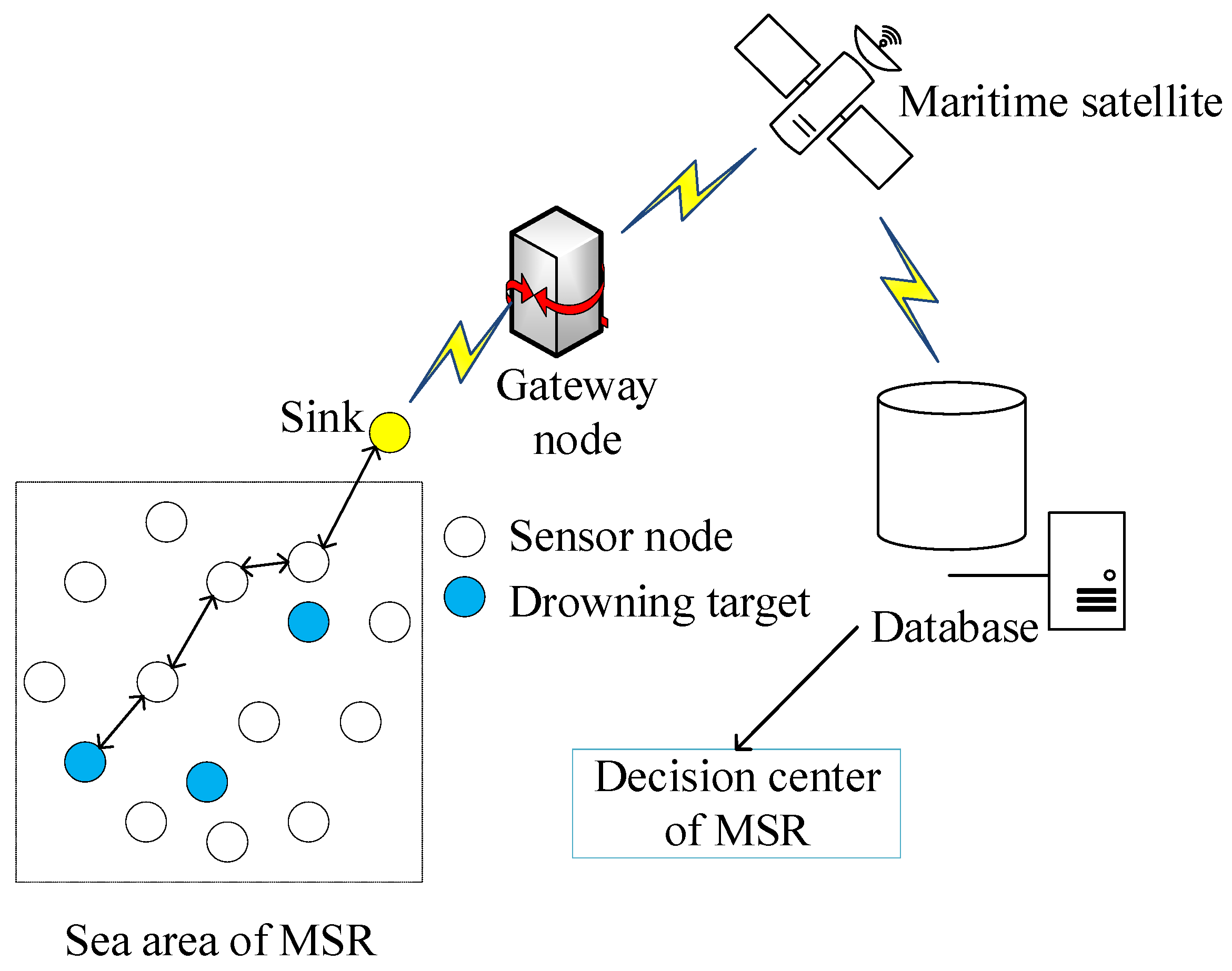
2.1. System Model
2.2. Problem Statement
3. Proposed Opportunistic Routing Algorithm
3.1. Link Reliability Prediction
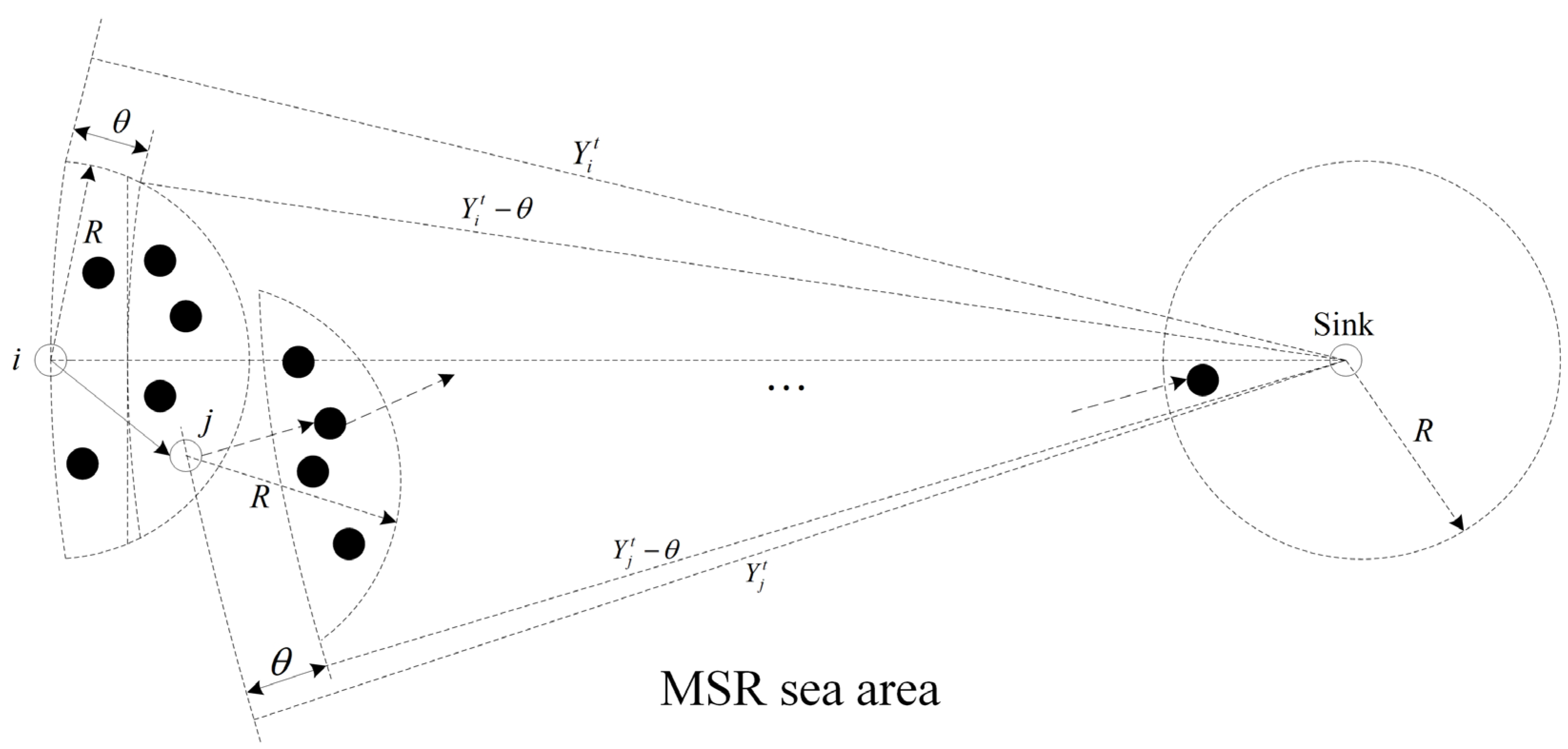
3.2. Optimal Expected Packet Advancement Prediction
3.3. Remaining Energy Distribution
| Algorithm 1 Updating the Energy Distribution of Neighbor Nodes |
| 1. Each forwarding the sending node loses 5% of its energy do 2. Inform the about the current remaining energy value. 3. For each candidate node do 4. Recalculate by Equation (14) 5. Update by Equation (15) 6. End for 7. For each candidate node 8. For each do 9. If do // is the number of neighbor nodes. 10. Add neighbor node to 11. End if 12. End for 13. End for |
3.4. Priority Calculation and Scheduling of Candidate Forwarding Nodes
| Algorithm 2 Scheduling of Candidate Forwarding Nodes |
| 1. When a marine node received ack message packets do 2. Calculate by Equation (15) 3. For each do |
| 4. If do // is the number of neighbor nodes. 5. Add neighbor node to 6. End if 7. End for 8. For each do 9. If candidate node successfully forwards the data packet then 10. other candidate nodes remain dormant 11. else 12. a lower-priority neighbor node will be activated and attempt to forward the data packet until the marine node’s perception data is successfully forwarded 13. End if 14. End for |
3.5. Expected Energy Consumption of MSR Data Forwarding
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Modalavalasa, S.; Sahoo, U.K.; Sahoo, A.K.; Baraha, S. A Review of Robust Distributed Estimation Strategies over Wireless Sensor Networks. Signal Process. 2021, 188, 108150. [Google Scholar] [CrossRef]
- Wu, H.; Xian, J.; Mei, X.; Zhang, Y.; Wang, J.; Cao, J.; Mohapatra, P. Efficient Target Detection in Maritime Search and Rescue Wireless Sensor Network Using Data Fusion. Comput. Commun. 2019, 136, 53–62. [Google Scholar] [CrossRef]
- Wu, H.; Mei, X.; Chen, X.; Li, J.; Wang, J.; Mohapatra, P. A Novel Cooperative Localization Algorithm Using Enhanced Particle Filter Technique in Maritime Search and Rescue Wireless Sensor Network. ISA Trans. 2018, 78, 39–46. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Wang, J.; Ananta, R.R.; Kommareddy, V.R.; Wang, R.; Mohapatra, P. Prediction Based Opportunistic Routing for Maritime Search and Rescue Wireless Sensor Network. J. Parallel Distrib. Comput. 2018, 111, 56–64. [Google Scholar] [CrossRef]
- Xian, J.; Wu, H.; Mei, X.; Zhang, Y.; Chen, H.; Wang, J. NMTLAT: A New Robust Mobile Multi-Target Localization and Tracking Scheme in Marine Search and Rescue Wireless Sensor Networks under Byzantine Attack. Comput. Commun. 2020, 160, 623–635. [Google Scholar] [CrossRef]
- Zhou, Y.; Cao, T.; Xiang, W. Anypath Routing Protocol Design via Q-Learning for Underwater Sensor Networks. IEEE Internet Things J. 2020, 8, 8173–8190. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, R. Centralized Energy-Efficient Clustering Routing Protocol for Mobile Nodes in Wireless Sensor Networks. IEEE Commun. Lett. 2019, 23, 1215–1218. [Google Scholar] [CrossRef]
- Sarma, H.K.D.; Mall, R.; Kar, A. E 2 R 2: Energy-Efficient and Reliable Routing for Mobile Wireless Sensor Networks. IEEE Syst. J. 2015, 10, 604–616. [Google Scholar] [CrossRef]
- Almesaeed, R.; Jedidi, A. Dynamic Directional Routing for Mobile Wireless Sensor Networks. Ad Hoc Netw. 2021, 110, 102301. [Google Scholar] [CrossRef]
- Ahmad, M.; Li, T.; Khan, Z.; Khurshid, F.; Ahmad, M. A Novel Connectivity-Based LEACH-MEEC Routing Protocol for Mobile Wireless Sensor Network. Sensors 2018, 18, 4278. [Google Scholar] [CrossRef]
- Karim, L.; Nasser, N. Reliable Location-Aware Routing Protocol for Mobile Wireless Sensor Network. IET Commun. 2012, 6, 2149–2158. [Google Scholar] [CrossRef]
- Umar, M.M.; Alrajeh, N.; Mehmood, A. SALMA: An Efficient State-Based Hybrid Routing Protocol for Mobile Nodes in Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2016, 12, 2909618. [Google Scholar] [CrossRef] [Green Version]
- Mukhtar, M.F.; Shiraz, M.; Shaheen, Q.; Ahsan, K.; Akhtar, R.; Changda, W. Rbm: Region-Based Mobile Routing Protocol for Wireless Sensor Networks. Wirel. Commun. Mob. Comput. 2021, 2021, 6628226. [Google Scholar] [CrossRef]
- Toor, A.S.; Jain, A.K. Energy Aware Cluster Based Multi-Hop Energy Efficient Routing Protocol Using Multiple Mobile Nodes (MEACBM) in Wireless Sensor Networks. AEU-Int. J. Electron. Commun. 2019, 102, 41–53. [Google Scholar] [CrossRef]
- Chakchouk, N. A Survey on Opportunistic Routing in Wireless Communication Networks. IEEE Commun. Surv. Tutor. 2015, 17, 2214–2241. [Google Scholar] [CrossRef]
- Coutinho, R.W.L.; Boukerche, A. OMUS: Efficient Opportunistic Routing in Multi-Modal Underwater Sensor Networks. IEEE Trans. Wirel. Commun. 2021, 20, 5642–5655. [Google Scholar] [CrossRef]
- Coutinho, R.W.L.; Boukerche, A.; Vieira, L.F.M.; Loureiro, A.A.F. Design Guidelines for Opportunistic Routing in Underwater Networks. IEEE Commun. Mag. 2016, 54, 40–48. [Google Scholar] [CrossRef]
- Ismail, M.; Islam, M.; Ahmad, I.; Khan, F.A.; Qazi, A.B.; Khan, Z.H.; Wadud, Z.; Al-Rakhami, M. Reliable Path Selection and Opportunistic Routing Protocol for Underwater Wireless Sensor Networks. IEEE Access 2020, 8, 100346–100364. [Google Scholar] [CrossRef]
- Su, Y.; Liwang, M.; Gao, Z.; Huang, L.; Du, X.; Guizani, M. Optimal Cooperative Relaying and Power Control for IoUT Networks with Reinforcement Learning. IEEE Internet Things J. 2020, 8, 791–801. [Google Scholar] [CrossRef]
- Zou, Z.; Lin, X.; Sun, J. A Cluster-Based Adaptive Routing Algorithm for Underwater Acoustic Sensor Networks. In Proceedings of the 2019 International Conference on Intelligent Computing, Automation and Systems (ICICAS), Chongqing, China, 6–8 December 2019; pp. 302–310. [Google Scholar]
- Coutinho, R.W.L.; Boukerche, A.; Vieira, L.F.M.; Loureiro, A.A.F. Geographic and Opportunistic Routing for Underwater Sensor Networks. IEEE Trans. Comput. 2015, 65, 548–561. [Google Scholar] [CrossRef]
- Guan, Q.; Ji, F.; Liu, Y.; Yu, H.; Chen, W. Distance-Vector-Based Opportunistic Routing for Underwater Acoustic Sensor Networks. IEEE Internet Things J. 2019, 6, 3831–3839. [Google Scholar] [CrossRef]
- Karim, S.; Shaikh, F.K.; Chowdhry, B.S.; Mehmood, Z.; Tariq, U.; Naqvi, R.A.; Ahmed, A. GCORP: Geographic and Cooperative Opportunistic Routing Protocol for Underwater Sensor Networks. IEEE Access 2021, 9, 27650–27667. [Google Scholar] [CrossRef]
- Zhao, D.; Lun, G.; Xue, R.; Sun, Y. Cross-Layer-Aided Opportunistic Routing for Sparse Underwater Wireless Sensor Networks. Sensors 2021, 21, 3205. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Z.; Chen, L.; Wang, X. Reinforcement Learning-Based Opportunistic Routing Protocol for Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2021, 70, 2756–2770. [Google Scholar] [CrossRef]
- Zhu, R.; Jiang, Q.; Huang, X.; Li, D.; Yang, Q. A Reinforcement-Learning-Based Opportunistic Routing Protocol for Energy-Efficient and Void-Avoided UASNs. IEEE Sens. J. 2022, 22, 13589–13601. [Google Scholar] [CrossRef]
- Wang, X.; Wu, X.; Zhang, X. Optimizing Opportunistic Routing in Asynchronous Wireless Sensor Networks. IEEE Commun. Lett. 2017, 21, 2302–2305. [Google Scholar] [CrossRef]
- Saleh, A.I.; Abo-Al-Ez, K.M.; Abdullah, A.A. A Multi-Aware Query Driven (MAQD) Routing Protocol for Mobile Wireless Sensor Networks Based on Neuro-Fuzzy Inference. J. Netw. Comput. Appl. 2017, 88, 72–98. [Google Scholar] [CrossRef]
- Chatterjee, S.; Das, S. Ant Colony Optimization Based Enhanced Dynamic Source Routing Algorithm for Mobile Ad-Hoc Network. Inf. Sci. 2015, 295, 67–90. [Google Scholar] [CrossRef]
- Chang, Y.; Tang, H.; Li, B.; Yuan, X. Distributed Joint Optimization Routing Algorithm Based on the Analytic Hierarchy Process for Wireless Sensor Networks. IEEE Commun. Lett. 2017, 21, 2718–2721. [Google Scholar] [CrossRef]
- Hawbani, A.; Wang, X.; Sharabi, Y.; Ghannami, A.; Kuhlani, H.; Karmoshi, S. LORA: Load-Balanced Opportunistic Routing for Asynchronous Duty-Cycled WSN. IEEE Trans. Mob. Comput. 2018, 18, 1601–1615. [Google Scholar] [CrossRef]
- Chen, X.; Ling, J.; Wang, S.; Yang, Y.; Luo, L.; Yan, Y. Ship Detection from Coastal Surveillance Videos via an Ensemble Canny-Gaussian-Morphology Framework. J. Navig. 2021, 74, 1252–1266. [Google Scholar] [CrossRef]
- Mei, X.; Wu, H.; Xian, J.; Chen, B.; Zhang, H.; Liu, X. A Robust, Non-Cooperative Localization Algorithm in the Presence of Outlier Measurements in Ocean Sensor Networks. Sensors 2019, 19, 2708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mei, X.; Han, D.; Saeed, N.; Wu, H.; Ma, T.; Xian, J. Range Difference-Based Target Localization under Stratification Effect and NLOS Bias in UWSNs. IEEE Wirel. Commun. Lett. 2022, 11, 2080–2084. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, H.; Mei, X.; Liang, L.; Gulliver, T.A. Unknown Transmit Power RSSD-Based Localization in a Gaussian Mixture Channel. IEEE Sens. J. 2022, 22, 9114–9123. [Google Scholar] [CrossRef]
- Mei, X.; Han, D.; Saeed, N.; Wu, H.; Chang, C.-C.; Han, B.; Ma, T.; Xian, J. Trajectory Optimization of Autonomous Surface Vehicles with Outliers for Underwater Target Localization. Remote Sens. 2022, 14, 4343. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocols | Features | Advantages | Disadvantages |
|---|---|---|---|
| POR [4] | Prediction based opportunistic routing | Increases the PDR with an additional 3% energy consumption | Failure to realistically model the ocean dynamic environment |
| QLFR [6] | Q-learning-based localization-free opportunistic routing | Latency is reduced and network lifespan is increased | Bandwidth and link quality are not considered |
| E2R2 [8] | Hierarchical and cluster-based routing | Throughput is risen | The situation of high-speed movement of nodes is not considered |
| RPSOR [18] | Depth based opportunistic routing | Improves the PDR and decreases the energy consumption | High end-to-end delay in sparse networks |
| CBAR [20] | Cluster-Based adaptiverouting | Increases the life cycle of nodes | High end-to-end delay |
| Optimizing opportunistic routing in asynchronous WSNs [27] | Geographical-based opportunistic routing | End-to-end delay is reduced | Not suitable for mobile WSNs |
| MAQD [28] | Multi-aware query driven routing based on a neuro-fuzzy inference system | Decreases the End-to-end delay and routing overheads | PDR is reduced to a certain extent |
| E-Ant-DSR [29] | Enhanced Dynamic Source Routing based on the Ant Colony Optimization | End-to-end delay is reduced with low routing overhead | High computational complexity |
| DORAHP [30] | Distributed joint optimization routing based on the analytic hierarchy process | Extends network lifetime | High computational complexity |
| Our proposed opportunistic routing protocol | Marine environmental factors based opportunistic routing | Adaptive dynamic marine environment; Increases the PDR and network lifetime; End-to-end delay is reduced | Medium computational complexity |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 3 J | 0.0013 pJ/bit/m4 | ||
| 100 m | 3 | ||
| Simulation time | 70 s | 30 dB | |
| Channel bandwidth | 2 Mbps | 1 s | |
| 50 nJ/bit | 2 | ||
| 10 pJ/bit/m2 | 30 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xian, J.; Wu, H.; Mei, X.; Chen, X.; Yang, Y. Low-Delay and Energy-Efficient Opportunistic Routing for Maritime Search and Rescue Wireless Sensor Networks. Remote Sens. 2022, 14, 5178. https://doi.org/10.3390/rs14205178
Xian J, Wu H, Mei X, Chen X, Yang Y. Low-Delay and Energy-Efficient Opportunistic Routing for Maritime Search and Rescue Wireless Sensor Networks. Remote Sensing. 2022; 14(20):5178. https://doi.org/10.3390/rs14205178
Chicago/Turabian StyleXian, Jiangfeng, Huafeng Wu, Xiaojun Mei, Xinqiang Chen, and Yongsheng Yang. 2022. "Low-Delay and Energy-Efficient Opportunistic Routing for Maritime Search and Rescue Wireless Sensor Networks" Remote Sensing 14, no. 20: 5178. https://doi.org/10.3390/rs14205178
APA StyleXian, J., Wu, H., Mei, X., Chen, X., & Yang, Y. (2022). Low-Delay and Energy-Efficient Opportunistic Routing for Maritime Search and Rescue Wireless Sensor Networks. Remote Sensing, 14(20), 5178. https://doi.org/10.3390/rs14205178