
Route Plans for UAV Aerial Surveys according to Different DEMs in Complex Mountainous Surroundings: A Case Study in the Zheduoshan Mountains, China

 , , , , ,
, , , , ,
Abstract
:
1. Introduction
2. Overview of the Study Area
3. Data sources and Methodologies
3.1. Data Source
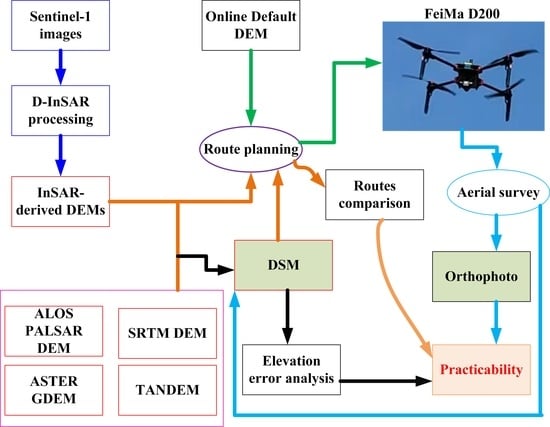
3.2. Methodologies
3.2.1. Sentinel-1 InSAR Processing for DEM Generation
3.2.2. UAV Pre-Scanning Images Processing for DSM Generation
3.2.3. Error Analysis and Practicability Analysis
4. Results and Analysis
4.1. Results of Pre-Scanning Aerial Drone Images
4.2. DEM Acquired by InSAR Processing Based on Sentinel-1 Images
4.3. Errors in the Different DEMs Based on the UAV DSM
4.4. UAV Route Planning Based on Different DEMs/DSM
5. Discussion
5.1. Factors for the InSAR-Derived DEM Process
5.2. InSAR-Derived DEMs for UAV Route Plans
6. Conclusions
- (1)
- For UAV surveys in mountainous regions, pre-scanning missions can provide an accurate DSM to plan routes for lower flight heights to obtain higher-resolution images, but it is time consuming and laborious.
- (2)
- Of the UAV route plans based on the four free and open-source DEMs, the SRTM DEM with a spatial resolution of 30 m performed the best, with an elevation error ranging from −50.19–72.08 m. The ASTER GDEM performed second best, while the TanDEM, at a resolution of 90 m, is not recommended.
- (3)
- Elevation products generated from Sentinel-1 images based on InSAR technology with a larger perpendicular baseline are a useful approach for complex mountains that are treeless. The DEMs can depict the terrain relatively well, and a good consistency exists according to the reference DSM, which is potentially valuable for UAV route plans.
- (4)
- Time-consuming and labor-intensive pre-scanning missions will hopefully be replaced with the easy InSAR-derived DEMs or existing precise DEMs, which can improve field UAV aerial survey efficiency and decrease the waste of time.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiang, J.; Johansen, K.; Tu, Y.-H.; McCabe, M.F. Multi-Sensor and Multi-Platform Consistency and Interoperability between UAV, Planet CubeSat, Sentinel-2, and Landsat Reflectance Data. GIsci. Remote Sens. 2022, 59, 936–958. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Martín-Torres, F.J.; Kumar, R. UAVs as Remote Sensing Platform in Glaciology: Present Applications and Future Prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned Aerial Systems for Photogrammetry and Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Yu, J. Quadrotor Unmanned Aerial Vehicle Design and Realization. Master Thesis, South China University of Technology, Guangzhou, China, 2018. [Google Scholar]
- Zhang, Y. Research on the Low-Altitude Safety from the Perspective of Risk Regulation: Take the Civil Unmanned Aerial Vehicle Management and Control in Beijing as an Example. Master Thesis, People’s Public Security University of China, Beijing, China, 2020. [Google Scholar]
- Sun, Z.; Wang, X.; Wang, Z.; Yang, L.; Xie, Y.; Huang, Y. UAVs as Remote Sensing Platforms in Plant Ecology: Review of Applications and Challenges. J. Plant Ecol. 2021, 14, 1003–1023. [Google Scholar] [CrossRef]
- Karl, J.W.; Yelich, J.V.; Ellison, M.J.; Lauritzen, D. Estimates of Willow (Salix Spp.) Canopy Volume Using Unmanned Aerial Systems. Rangel Ecol. Manag. 2020, 73, 531–537. [Google Scholar] [CrossRef]
- Getzin, S.; Wiegand, K.; Schöning, I. Assessing Biodiversity in Forests Using Very High-Resolution Images and Unmanned Aerial Vehicles. Methods Ecol. Evol. 2012, 3, 397–404. [Google Scholar] [CrossRef]
- Chisholm, R.A.; Cui, J.; Lum, S.K.Y.; Chen, B.M. Uav Lidar for Below-Canopy Forest Surveys. J. Unmanned Veh. Syst. 2013, 1, 61–68. [Google Scholar] [CrossRef] [Green Version]
- Tziavou, O.; Pytharouli, S.; Souter, J. Unmanned Aerial Vehicle (UAV) Based Mapping in Engineering Geological Surveys: Considerations for Optimum Results. Eng. Geol. 2018, 232, 12–21. [Google Scholar] [CrossRef] [Green Version]
- Messina, G.; Modica, G. Applications of UAV Thermal Imagery in Precision Agriculture: State of the Art and Future Research Outlook. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Rokhmana, C.A. The Potential of UAV-Based Remote Sensing for Supporting Precision Agriculture in Indonesia. Procedia Environ. Sci. 2015, 24, 245–253. [Google Scholar] [CrossRef]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; de Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The Use of Unmanned Aerial Vehicles (UAVs) for Engineering Geology Applications. Bull. Eng. Geol. Environ. 2020, 79, 3437–3481. [Google Scholar] [CrossRef] [Green Version]
- Forster, M.C.A. Implications of Climate Change for Hazardous Ground Conditions in the UK. Geol. Today 2004, 20, 61–67. [Google Scholar] [CrossRef]
- Valkaniotis, S.; Papathanassiou, G.; Ganas, A. Mapping an Earthquake-Induced Landslide Based on UAV Imagery; Case Study of the 2015 Okeanos Landslide, Lefkada, Greece. Eng. Geol. 2018, 245, 141–152. [Google Scholar] [CrossRef]
- Giordan, D.; Hayakawa, Y.; Nex, F.; Remondino, F.; Tarolli, P. Review Article: The Use of Remotely Piloted Aircraft Systems (RPASs) for Natural Hazards Monitoring and Management. Nat. Hazards Earth Syst. Sci. 2018, 18, 1079–1096. [Google Scholar] [CrossRef] [Green Version]
- Bolognesi, M.; Farina, G.; Alvisi, S.; Franchini, M.; Pellegrinelli, A.; Russo, P. Measurement of Surface Velocity in Open Channels Using a Lightweight Remotely Piloted Aircraft System. Geomat. Nat. Hazards Risk 2017, 8, 73–86. [Google Scholar] [CrossRef] [Green Version]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef] [Green Version]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative Remote Sensing at Ultra-High Resolution with UAV Spectroscopy: A Review of Sensor Technology, Measurement Procedures, and Data Correctionworkflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef] [Green Version]
- Katrašnik, J.; Pernuš, F.; Likar, B. A Survey of Mobile Robots for Distribution Power Line Inspection. IEEE Trans. Power Deliv. 2010, 25, 485–493. [Google Scholar] [CrossRef]
- Yuan, Z. Research on Application of UAV in Transmission Line Engineering Construction. In Proceedings of the 2021 International Conference on Machine Learning and Intelligent Systems Engineering, MLISE, Chongqing, China, 9–11 July 2021; pp. 420–424. [Google Scholar] [CrossRef]
- Li, X.; Li, Z.; Wang, H.; Li, W. Unmanned Aerial Vehicle for Transmission Line Inspection: Status, Standardization, and Perspectives. Front. Energy Res. 2021, 9, 336. [Google Scholar] [CrossRef]
- Gangolu, S.; Sarangi, S. A Novel Complex Current Ratio-Based Technique for Transmission Line Protection. Prot. Control Mod. Power Syst. 2020, 5, 1–9. [Google Scholar] [CrossRef]
- la Scalea, R.; Rodrigues, M.; Osorio, D.P.M.; Lima, C.H.; Souza, R.D.; Alves, H.; Branco, K.C. Opportunities for Autonomous UAV in Harsh Environments. In Proceedings of the 16th International Symposium on Wireless Communication Systems, Oulu, Finland, 27–30 August 2019; pp. 227–232. [Google Scholar] [CrossRef]
- Fahrner, W.R.; Job, R.; Werner, M. Sensors and Smart Electronics in Harsh Environment Applications. Microsyst. Technol. 2001, 7, 138–144. [Google Scholar] [CrossRef]
- Gitardi, D.; Giardini, M.; Valente, A. Autonomous Robotic Platform for Inspection and Repairing Operations in Harsh Environments. Int. J. Comput. Integr. Manuf. 2021, 34, 666–684. [Google Scholar] [CrossRef]
- Wong, C.; Yang, E.; Yan, X.-T.; Gu, D. Autonomous Robots for Harsh Environments: A Holistic Overview of Current Solutions and Ongoing Challenges. Syst. Sci. Control. Eng. 2018, 6, 213–219. [Google Scholar] [CrossRef] [Green Version]
- Mazzini, F.; Dubowsky, S. An Experimental Validation of Robotic Tactile Mapping in Harsh Environments Such as Deep Sea Oil Well Sites. Springer Tracts Adv. Robot. 2014, 79, 557–570. [Google Scholar] [CrossRef]
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1–3022. [Google Scholar] [CrossRef]
- Granshaw, S.I. Photogrammetric Terminology, 4th ed.; John Wiley & Sons, Ltd: Hoboken, NJ, USA, 2020; Volume 35. [Google Scholar]
- Du, Q.; Li, G.; Li, J.; Zhou, Y. Research on the River Extraction Based on the DEM Data in the Central West Tianshan Mountains. China Rural Water Hydropower 2020, 10, 29–33, 40. [Google Scholar] [CrossRef]
- Yao, B.; Zhou, W. Research on Hydrological Characteristics Extraction of Chanba Basin Based on DEM and ArcGIS. J. Water Resour. Water 2017, 28, 8–13. [Google Scholar] [CrossRef]
- Dewitt, J.D.; Warner, T.A.; Conley, J.F. Comparison of DEMS Derived from USGS DLG, SRTM, a Statewide Photogrammetry Program, ASTER GDEM and LiDAR: Implications for Change Detection. GIsci. Remote Sens. 2015, 52, 179–197. [Google Scholar] [CrossRef]
- Qingsong, D.; Guoyu, L.; Wanlin, P.; Yu, Z.; Mingtang, C.; Jinming, L. Acquiring High-Precision DEM in High Altitude and Cold Area Using InSAR Technology. Bull. Surv. Mapp. 2021, 3, 44–49. [Google Scholar] [CrossRef]
- Mejías, L.; Correa, J.F.; Mondragón, I.; Campoy, P. COLIBRI: A Vision-Guided UAV for Surveillance and Visual Inspection. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2760–2761. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Zhang, J.; Gong, L.; Shang, X. Comparison and Validation of Different DEM Data Derived from InSAR. Procedia Environ. Sci. 2012, 12, 590–597. [Google Scholar] [CrossRef] [Green Version]
- Graham, L.C. Synthetic Interferometer Radar for Topographic Mapping. Proceeding IEEE 1974, 62, 763–768. [Google Scholar] [CrossRef]
- Chaabani, A.; Deffontaines, B. Application of the SBAS-DInSAR Technique for Deformation Monitoring in Tunis City and Mornag Plain. Geomat. Nat. Hazards Risk 2020, 11, 1346–1377. [Google Scholar] [CrossRef]
- Imamoglu, M.; Kahraman, F.; Cakir, Z.; Sanli, F.B. Ground Deformation Analysis of Bolvadin (W. Turkey) by Means of Multi-Temporal InSAR Techniques and Sentinel-1 Data. Remote Sens. 2019, 11, 1069. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Stein, A.; Molenaar, M. Integrating Interferometric SAR Data with Levelling Measurements of Land Subsidence Using Geostatistics. Int, J. Remote Sens. 2003, 24, 3547–3563. [Google Scholar] [CrossRef]
- JIA, S.; ZHANG, T.; FAN, C.; LIU, L.; SHAO, W. Research Progress of InSAR Technology in Permafrost. Adv. Earth Sci. 2021, 36, 694. [Google Scholar] [CrossRef]
- Kimura, Y.Y.H. Detection of Landslide Areas Using Satellite Radar Interferometry. Photogramm Eng. Remote Sens. 2000, 66, 337–344. [Google Scholar]
- Li, X.; Zhou, L.; Su, F.; Wu, W. Application of InSAR Technology in Landslide Hazard: Progress and Prospects. Yaogan Xuebao/Natl. Remote Sens. 2021, 25, 614–629. [Google Scholar] [CrossRef]
- Lu, Z.; Dzurisin, D. InSAR Imaging of Aleutian Volcanoes; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Garthwaite, M.C.; Miller, V.L.; Saunders, S.; Parks, M.M.; Hu, G.; Parker, A.L. A Simplified Approach to Operational InSAR Monitoring of Volcano Deformation in Low-and Middle-Income Countries: Case Study of Rabaul Caldera, Papua New Guinea. Front Earth Sci. (Lausanne) 2019, 6, 240. [Google Scholar] [CrossRef] [Green Version]
- Wegmüller, U.; Santoro, M.; Werner, C.; Strozzi, T.; Wiesmann, A.; Lengert, W. DEM Generation Using ERS–ENVISAT Interferometry. J. Appl. Geophys. 2009, 69, 51–58. [Google Scholar] [CrossRef]
- Braun, A. Retrieval of Digital Elevation Models from Sentinel-1 Radar Data—Open Applications, Techniques, and Limitations. Open Geosci. 2021, 13, 532–569. [Google Scholar] [CrossRef]
- Zebker, H.A.; Goldstein, R.M. Topographic Mapping from Interferometer SAR Observations. J. Geophys. Res. 1986, 91, 4993–5000. [Google Scholar] [CrossRef]
- Liu, Y.; Gong, Y.; Li, Y.; Zhu, D.; Liu, H.; Shuai, W. Soil Stoichiometric Characteristics of Alpine Shrub Meadowat Different Elevations, Western Sichuan. J. Sichuan Agric. Univ. 2018, 36, 167–174. [Google Scholar] [CrossRef]
- Wang, X. GIS-Based Study on Temperature Lapse Rate in Mountain Areas in China. Master Thesis, Nanjing University of Information Science & Technology, Nanjing, China, 2015. [Google Scholar]
- Yang, Y. Study on Freeze-Thaw Damage Mechanism of Different Lithologic Rocks with Fractures. Master Thesis, Chengdu University Of Technology, Chengdu, China, 2018. [Google Scholar]
- Zhou, T.; NARAYAN, P.G.; LIAO, L.; Zhang, L.; Wang, J.; Sun, J.; Wei, Y.; Xie, Y.; Wu, Y. Spatio-Temporal Dynamics of Two Alpine Treeline Ecotones and Ecological Characteristics of Their Dominate Species at the Eastern Margin of Qinghai-Xizang Plateau. Chin. J. Plant Ecol. 2018, 42, 1082–1093. [Google Scholar] [CrossRef] [Green Version]
- Xiang, Q.; Pan, J.; Zhang, G.; Xu, Z.; Zhang, D.; Tu, W. Monitoring and Analysis of Surface Deformation in the Zheduoshan Area of Sichuan-Tibet Railway Based on SBAS Technology. Eng. Surv. Mapp. 2020, 48–54+59. [Google Scholar] [CrossRef]
- Shan, J.; Li, Z.; Zhang, W. Recent Progress in Large-Scale 3D City Modeling. Acta Geod. Et Cartogr. Sin. 2019, 48, 1523–1541. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D Mapping Applications: A Review. Appl. Geomat. 2013, 6, 1–15. [Google Scholar] [CrossRef]
- Shan, X.J.; Ye, H. The INSAR Technique: Its Principle and Applications to Mapping the Deformation Field of Earthquakes. Acta Seismol. Sin. 1998, 11, 759–769. [Google Scholar] [CrossRef]
- Yu, H.; Lan, Y.; Yuan, Z.; Xu, J.; Lee, H. Phase Unwrapping in InSAR: A Review. IEEE Geosci Remote Sens. Mag. 2019, 7, 40–58. [Google Scholar] [CrossRef]
- SNAPHU. Available online: https://web.stanford.edu/group/radar/softwareandlinks/sw/snaphu/ (accessed on 5 July 2022).
- Chen, C.W.; Zebker, H.A. Network Approaches to Two-Dimensional Phase Unwrapping: Intractability and Two New Algorithms. JOSA A 2000, 17, 401–414. [Google Scholar] [CrossRef]
- Chen, C.W.; Zebker, H.A. Two-Dimensional Phase Unwrapping with Use of Statistical Models for Cost Functions in Nonlinear Optimization. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2001, 18, 338. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.W.; Zebker, H.A. Phase Unwrapping for Large SAR Interferograms: Statistical Segmentation and Generalized Network Models. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1709–1719. [Google Scholar] [CrossRef] [Green Version]
- Chai, M.; Li, G.; Ma, W.; Chen, D.; Du, Q.; Zhou, Y.; Qi, S.; Tang, L.; Jia, H. Damage Characteristics of the Qinghai-Tibet Highway in Permafrost Regions Based on UAV Imagery. Int. J. Pavement Eng. 2022, 1–12. [Google Scholar] [CrossRef]
- Valavanis, K.P.; Vachtsevanos, G.J. UAV Design Principles: Introduction. In Handbook of Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2015; pp. 107–108. [Google Scholar] [CrossRef]
- Müller, J.A.; Ehlers, T.; Gollnick, V. Drone Routing Optimizer for Aerial Inspections of Energy and Railway Infrastructures. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022. [Google Scholar] [CrossRef]
- Dermanis, A. The Photogrammetric Inner Constraints. ISPRS J. Photogramm Remote Sens. 1994, 49, 25–39. [Google Scholar] [CrossRef]
- Zhang, B.; Li, J.; Ren, H. Using Phase Unwrapping Methods to Apply D-InSAR in Mining Areas. Can. J. Remote Sens. 2019, 45, 225–233. [Google Scholar] [CrossRef]
- Guan, H.; Sun, X.; Su, Y.; Hu, T.; Wang, H.; Wang, H.; Peng, C.; Guo, Q. UAV-Lidar Aids Automatic Intelligent Powerline Inspection. Int. J. Electr. Power Energy Syst. 2021, 130, 106987. [Google Scholar] [CrossRef]
- Hu, Z.-L.; Deng, Y.-Z.; Peng, H.; Han, J.-M.; Zhu, X.-B.; Zhao, D.-D.; Wang, H.; Zhang, J. Optimal Path Planning with Minimum Inspection Teams and Balanced Working Hours For Power Line Inspection. Front Phys. 2022, 10, 657. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Block | Sortie | Date | Takeoff Time | Start Time | End Time | Number of Images | Time Interval before Operation (min) | Effective Aerial Time Interval (min) |
|---|---|---|---|---|---|---|---|---|
| One | 1st | 25 August 2020 | 13:41 | 13:47 | 13:56 | 84 | 6 | 9 |
| 2nd | 25 August 2020 | 14:09 | 14:16 | 14:27 | 102 | 7 | 11 | |
| 3rd | 25 August 2020 | 14:39 | 14:44 | 14:55 | 103 | 5 | 11 | |
| Two | 4th | 25 August 2020 | 15:09 | 15:18 | 15:25 | 62 | 9 | 7 |
| 5th | 25 August 2020 | 15:43 | 15:49 | 16:04 | 138 | 6 | 15 | |
| 6th | 25 August 2020 | 16:40 | 16:49 | 17:00 | 110 | 9 | 11 | |
| 7th | 26 August 2020 | 11:21 | 11:28 | 11:41 | 118 | 7 | 13 | |
| 8th | 26 August 2020 | 11:59 | 12:07 | 12:10 | 23 | 8 | 3 | |
| Three | 9th | 26 August 2020 | 12:34 | 12:38 | 12:57 | 160 | 4 | 19 |
| 10th | 26 August 2020 | 13:11 | 13:15 | 13:26 | 89 | 4 | 11 | |
| Four | 11th | 26 August 2020 | 13:46 | 13:55 | 14:06 | 98 | 9 | 11 |
| 12th | 26 August 2020 | 14:21 | 14:28 | 14:42 | 131 | 7 | 14 | |
| 13th | 26 August 2020 | 14:57 | 15:04 | 15:11 | 65 | 7 | 7 | |
| Summary | 1283 | 88 | 142 |
| Flight Direction | R/S | Acquisition | Track | Orbit | PB | TB | Subswath | P | Bursts |
|---|---|---|---|---|---|---|---|---|---|
| Ascending | R | 24 August 2020 | 26 | 24048 | 0 | 0 | IW2 | VV | 4-5 |
| S | 5 September 2020 | 26 | 34223 | 84.54 | 12 | IW2 | VV | 4-5 | |
| Descending | R | 19 August 2020 | 135 | 33982 | 0 | 0 | IW1, IW2 | VV | 2-3, 1-2 |
| S | 31 August 2020 | 135 | 34157 | 31.87 | 12 | IW1, IW2 | VV | 2-3, 1-2 |
| Reference Dataset | Blocks | OGSR (m) | FH (m) | AE (m) | HA (m) | LA (m) | EER (m) |
|---|---|---|---|---|---|---|---|
| DSM | 1 | 0.08 | 408 | 4430 | 4624 | 4238 | |
| 2 | 0.08 | 408 | 4505 | 4761 | 4339 | ||
| 3 | 0.11 | 561 | 4373 | 4610 | 4055 | ||
| 4 | 0.07 | 357 | 4541 | 4773 | 4376 | ||
| Ascending InSAR-derived DEM | 1 | 0.13 | 663 | 4415 | 4648 | 4215 | −300.19 −182.95 |
| 2 | 0.08 | 408 | 4530 | 4762 | 4357 | ||
| 3 | 0.11 | 561 | 4350 | 4592 | 4025 | ||
| 4 | 0.08 | 408 | 4528 | 4742 | 4348 | ||
| Descending InSAR-derived DEM | 1 | 0.13 | 663 | 4481 | 4729 | 4236 | −742.14 −526.16 |
| 2 | 0.13 | 663 | 4528 | 4828 | 4303 | ||
| 3 | 0.16 | 816 | 4419 | 4750 | 3951 | ||
| 4 | 0.12 | 612 | 4589 | 4823 | 4385 | ||
| ALOS PALSAR DEM | 1 | 0.08 | 408 | 4426 | 4615 | 4235 | −84.22 −40.28 |
| 2 | 0.12 | 612 | 4502 | 4735 | 4338 | ||
| 3 | 0.11 | 561 | 4369 | 4595 | 4058 | ||
| 4 | 0.07 | 357 | 4538 | 4738 | 4378 | ||
| ASTER GDEM DEM | 1 | 0.08 | 408 | 4468 | 4667 | 4283 | −77.94−74.02 |
| 2 | 0.08 | 408 | 4544 | 4760 | 4382 | ||
| 3 | 0.11 | 561 | 4410 | 4644 | 4096 | ||
| 4 | 0.07 | 357 | 4580 | 4782 | 4419 | ||
| SRTM DEM | 1 | 0.08 | 408 | 4456 | 4648 | 4268 | −50.19−72.08 |
| 2 | 0.08 | 408 | 4533 | 4763 | 4367 | ||
| 3 | 0.11 | 561 | 4400 | 4623 | 4084 | ||
| 4 | 0.07 | 357 | 4568 | 4773 | 4409 | ||
| TanDEM | 1 | 0.08 | 408 | 4430 | 4630 | 4247 | −61.27−55.60 |
| 2 | 0.07 | 357 | 4502 | 4726 | 4337 | ||
| 3 | 0.11 | 561 | 4374 | 4580 | 4051 | ||
| 4 | 0.07 | 357 | 4539 | 4731 | 4382 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, Q.; Li, G.; Zhou, Y.; Chen, D.; Chai, M.; Qi, S.; Cao, Y.; Tang, L.; Jia, H. Route Plans for UAV Aerial Surveys according to Different DEMs in Complex Mountainous Surroundings: A Case Study in the Zheduoshan Mountains, China. Remote Sens. 2022, 14, 5215. https://doi.org/10.3390/rs14205215
Du Q, Li G, Zhou Y, Chen D, Chai M, Qi S, Cao Y, Tang L, Jia H. Route Plans for UAV Aerial Surveys according to Different DEMs in Complex Mountainous Surroundings: A Case Study in the Zheduoshan Mountains, China. Remote Sensing. 2022; 14(20):5215. https://doi.org/10.3390/rs14205215
Chicago/Turabian StyleDu, Qingsong, Guoyu Li, Yu Zhou, Dun Chen, Mingtang Chai, Shunshun Qi, Yapeng Cao, Liyun Tang, and Hailiang Jia. 2022. "Route Plans for UAV Aerial Surveys according to Different DEMs in Complex Mountainous Surroundings: A Case Study in the Zheduoshan Mountains, China" Remote Sensing 14, no. 20: 5215. https://doi.org/10.3390/rs14205215
APA StyleDu, Q., Li, G., Zhou, Y., Chen, D., Chai, M., Qi, S., Cao, Y., Tang, L., & Jia, H. (2022). Route Plans for UAV Aerial Surveys according to Different DEMs in Complex Mountainous Surroundings: A Case Study in the Zheduoshan Mountains, China. Remote Sensing, 14(20), 5215. https://doi.org/10.3390/rs14205215