

Theory and Experiment Analysis on the Influence of Floods on a GNSS Pseudo-Range Multipath and CNR Signal Based on Two Cases Study in China



Abstract
:1. Introduction
2. Theory and Methods
2.1. Relationship between Floods and Multipaths
2.2. Relationship between the GNSS CNR Signal and Multipath
2.3. Pseudorange Multipath Combination Model
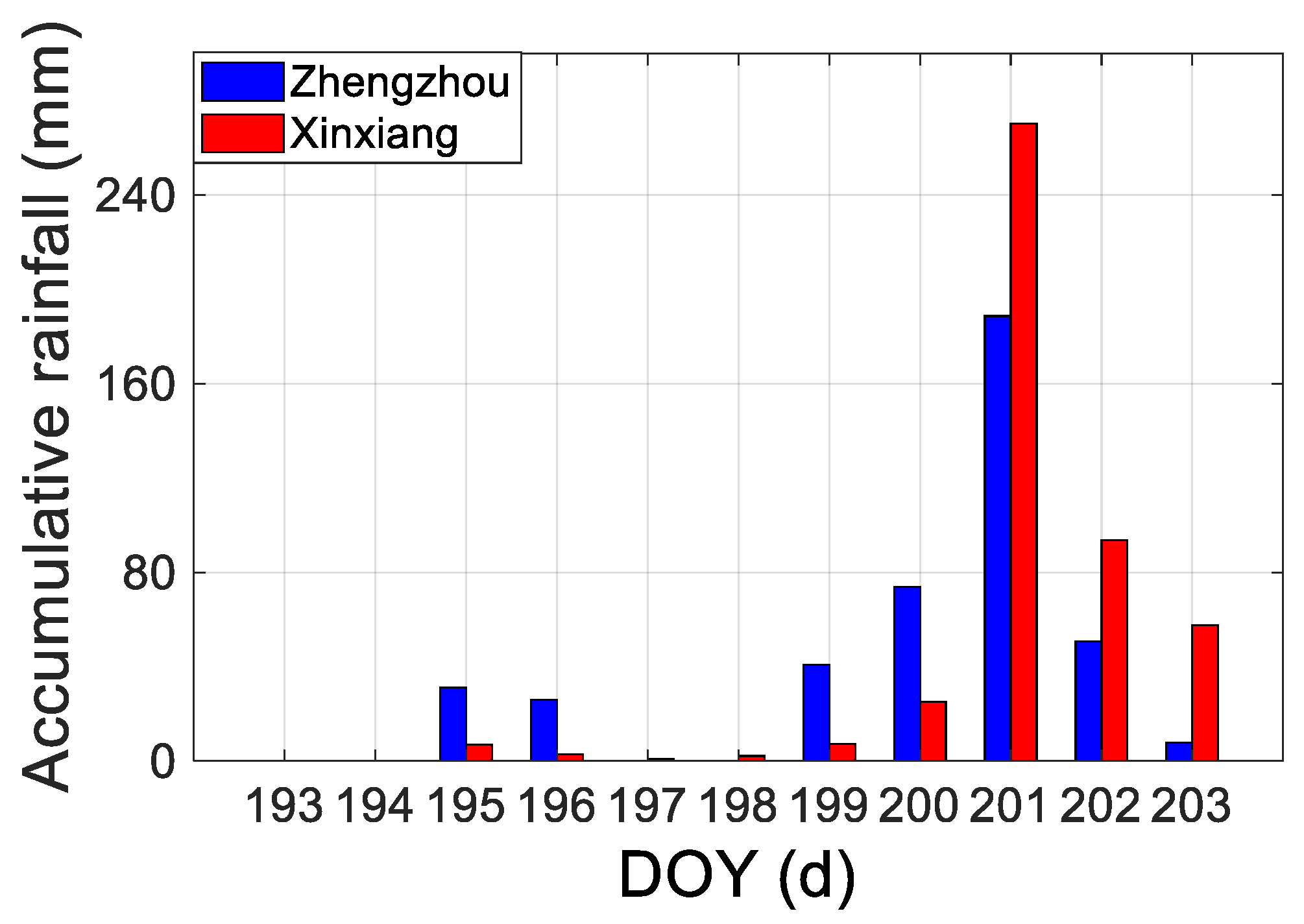
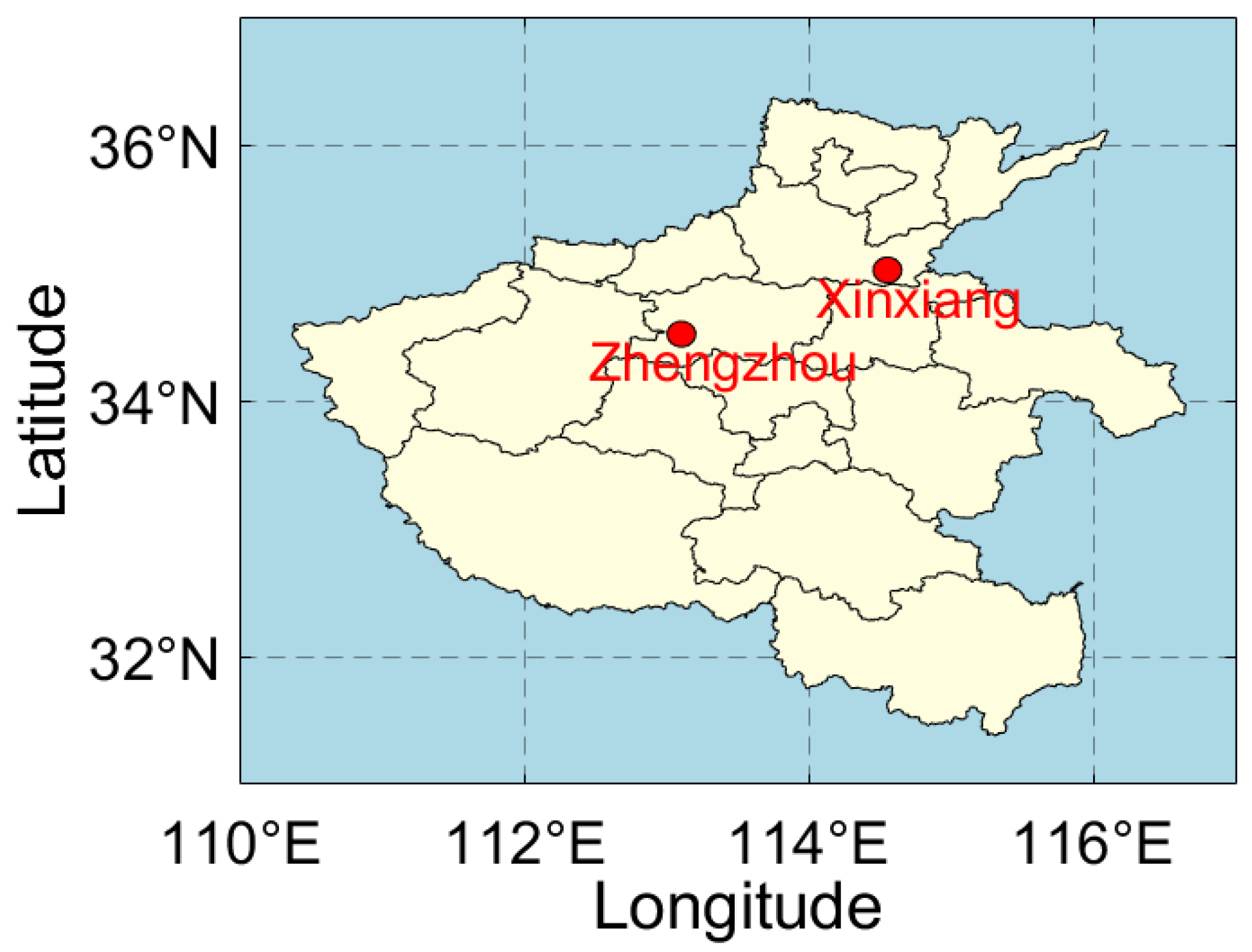
3. Site and Data Set Description
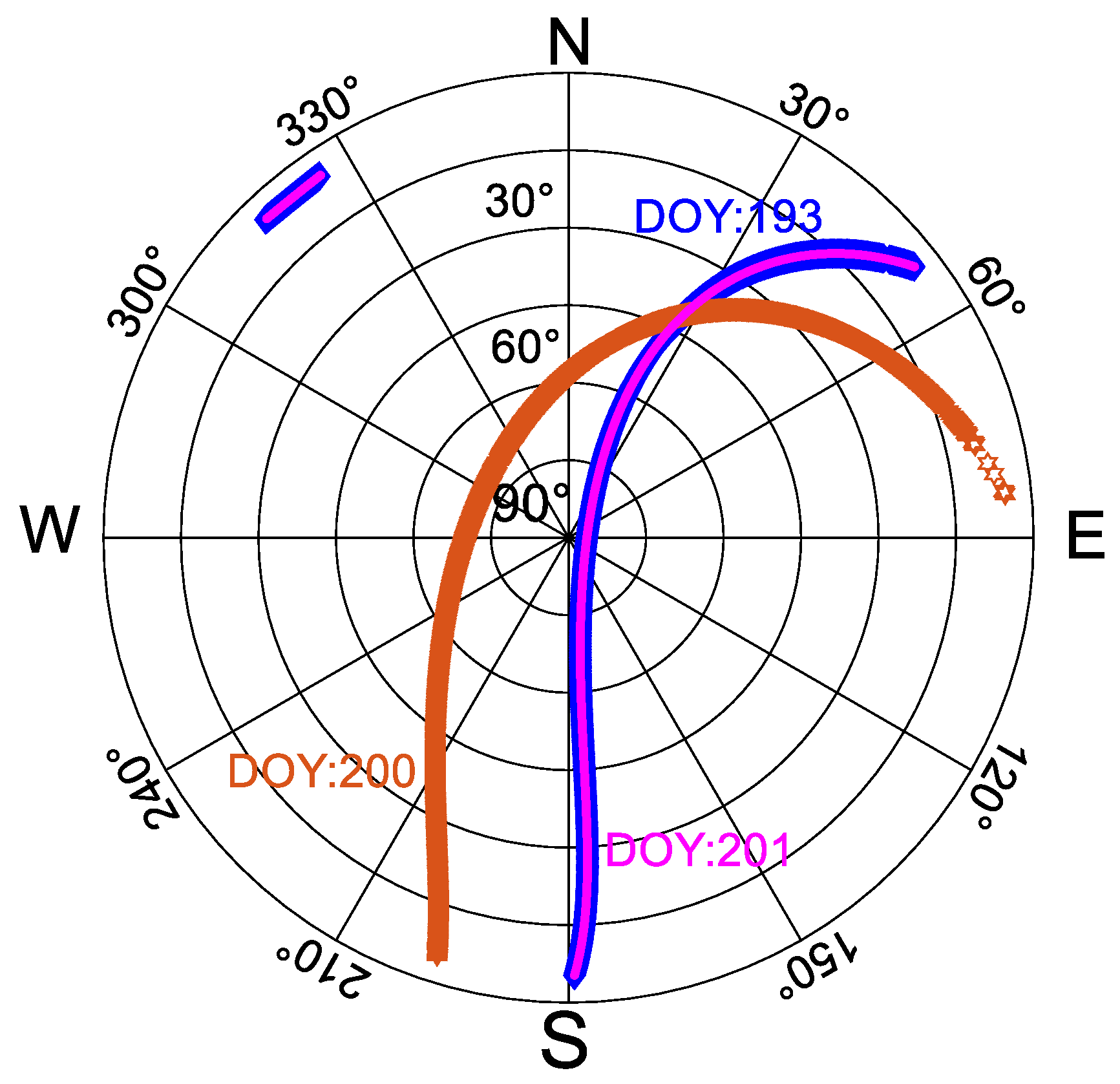
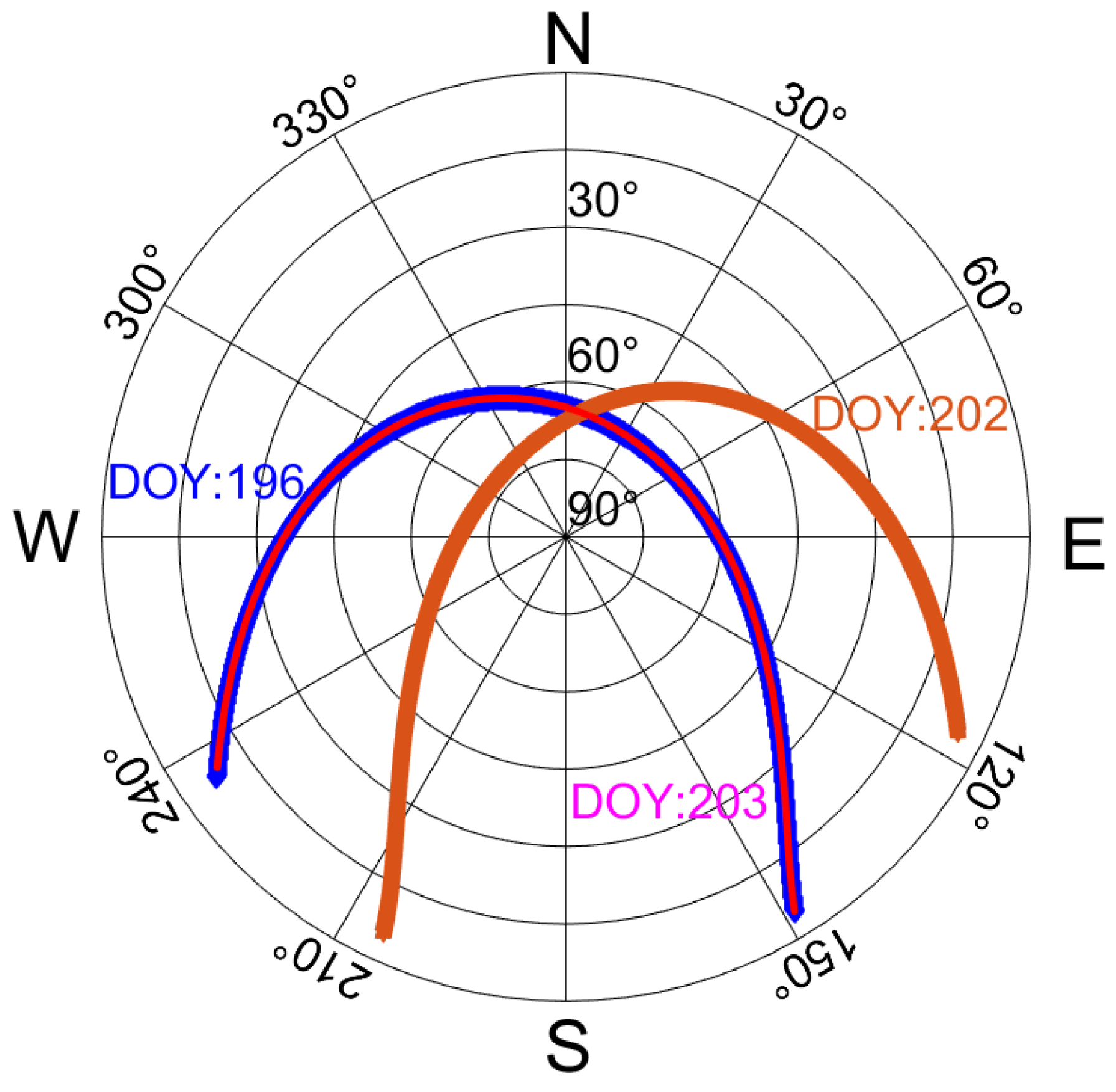
4. Ground Track Repeat Period of GPS, GLONASS, and BDS Satellites
4.1. Theory of Ground Track Repeat Period Model
4.2. Results Analysis of Ground Track Repetition Period
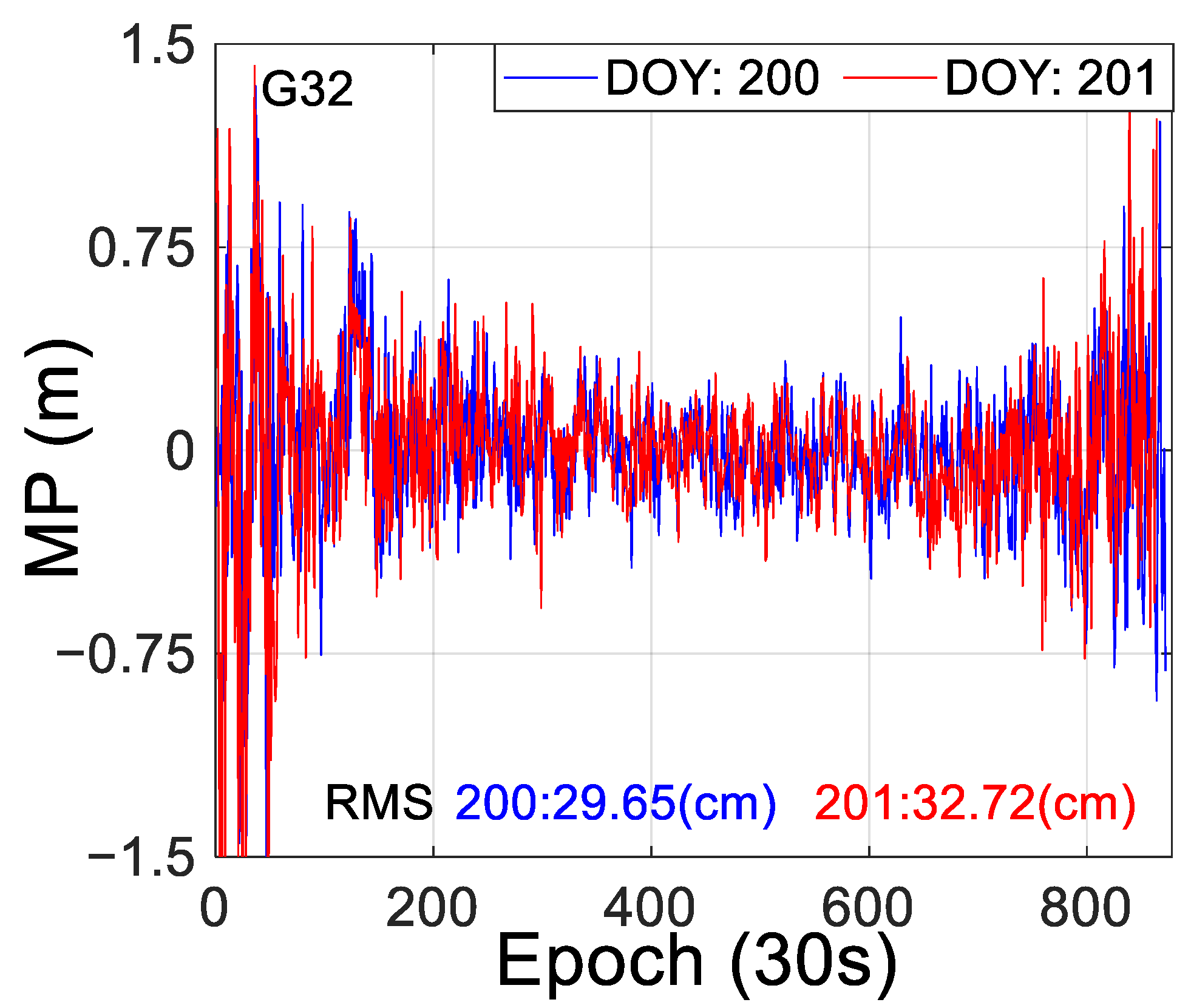
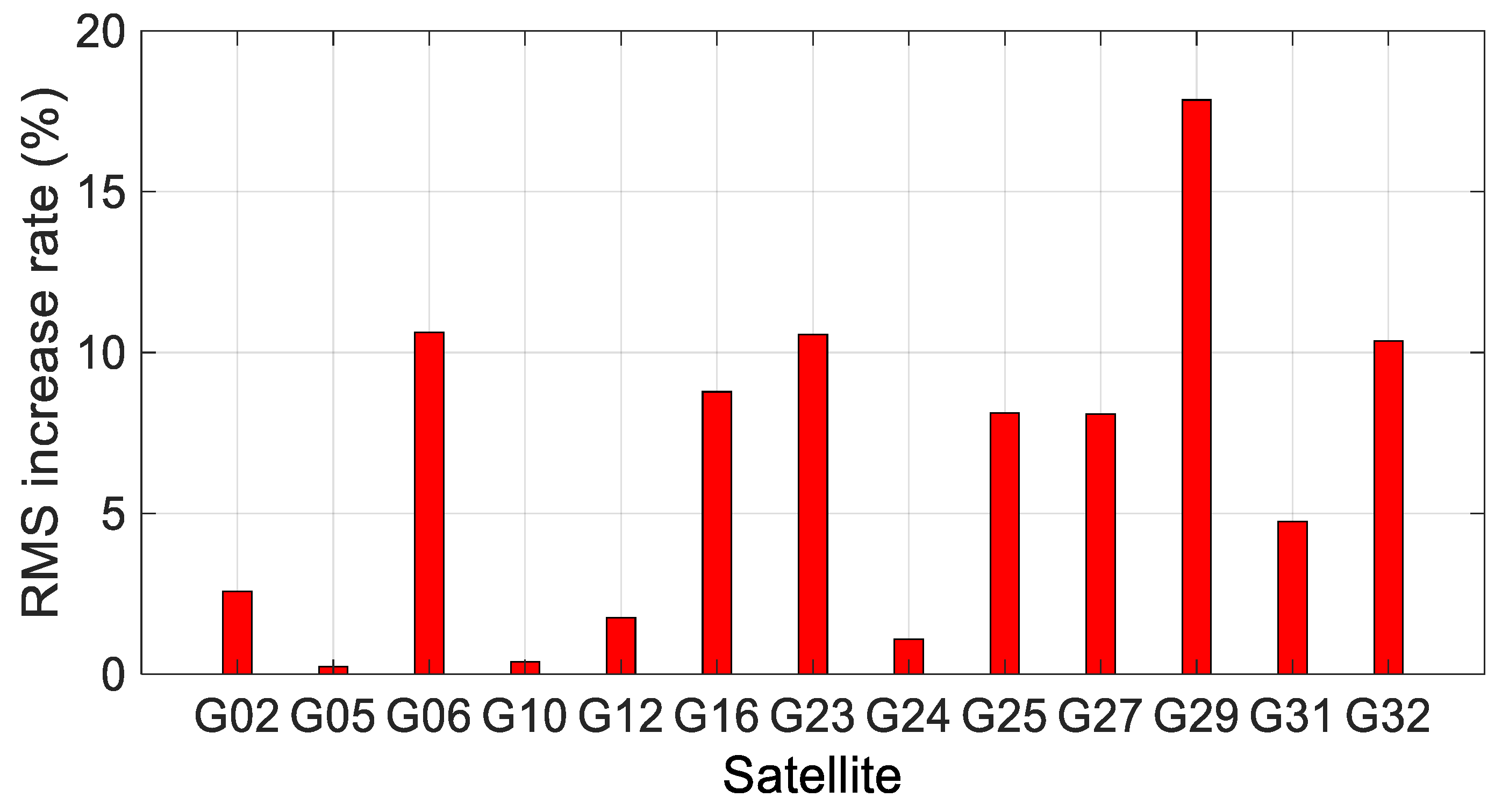
5. Influence of Floods on GPS MP Signals
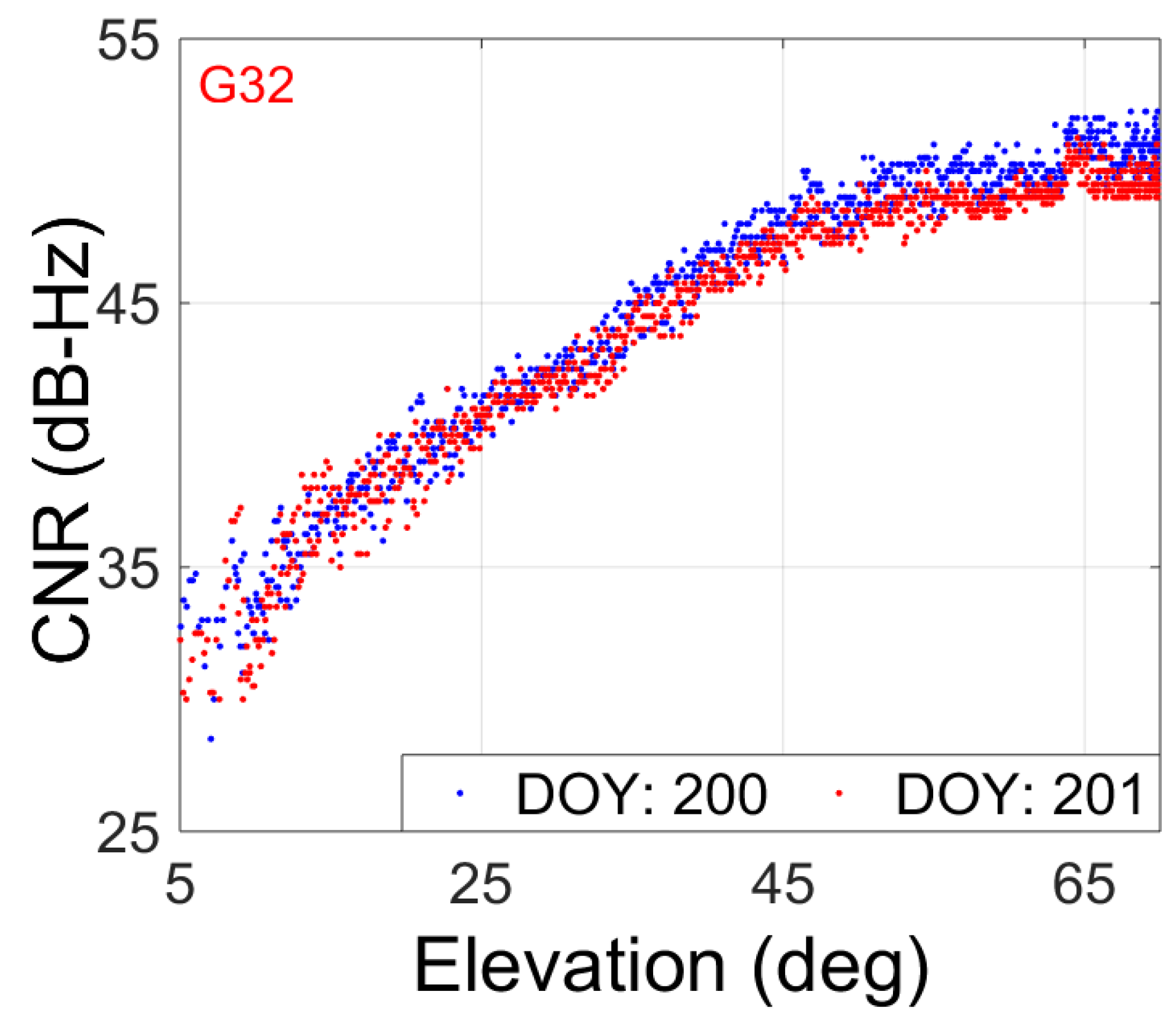
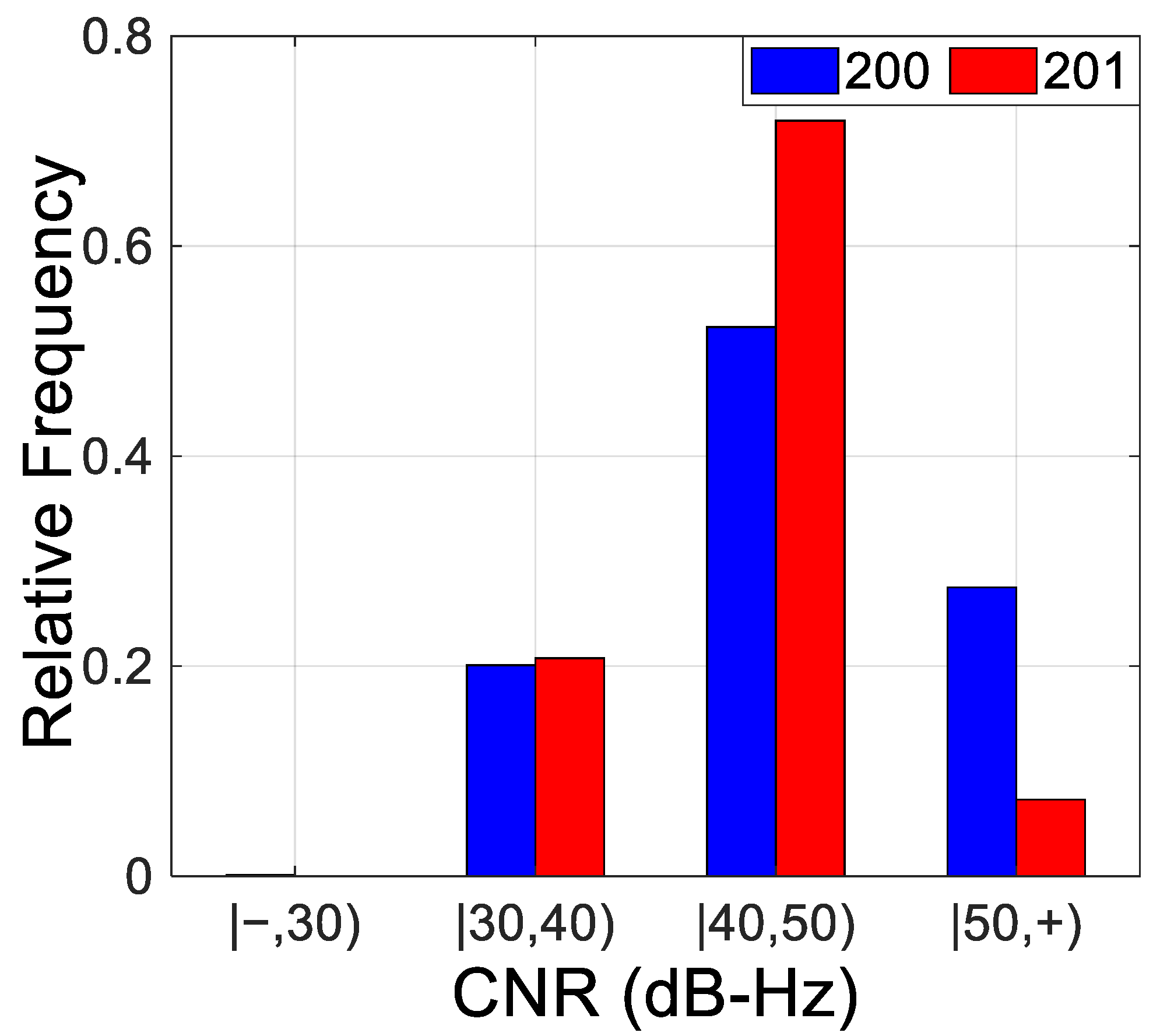
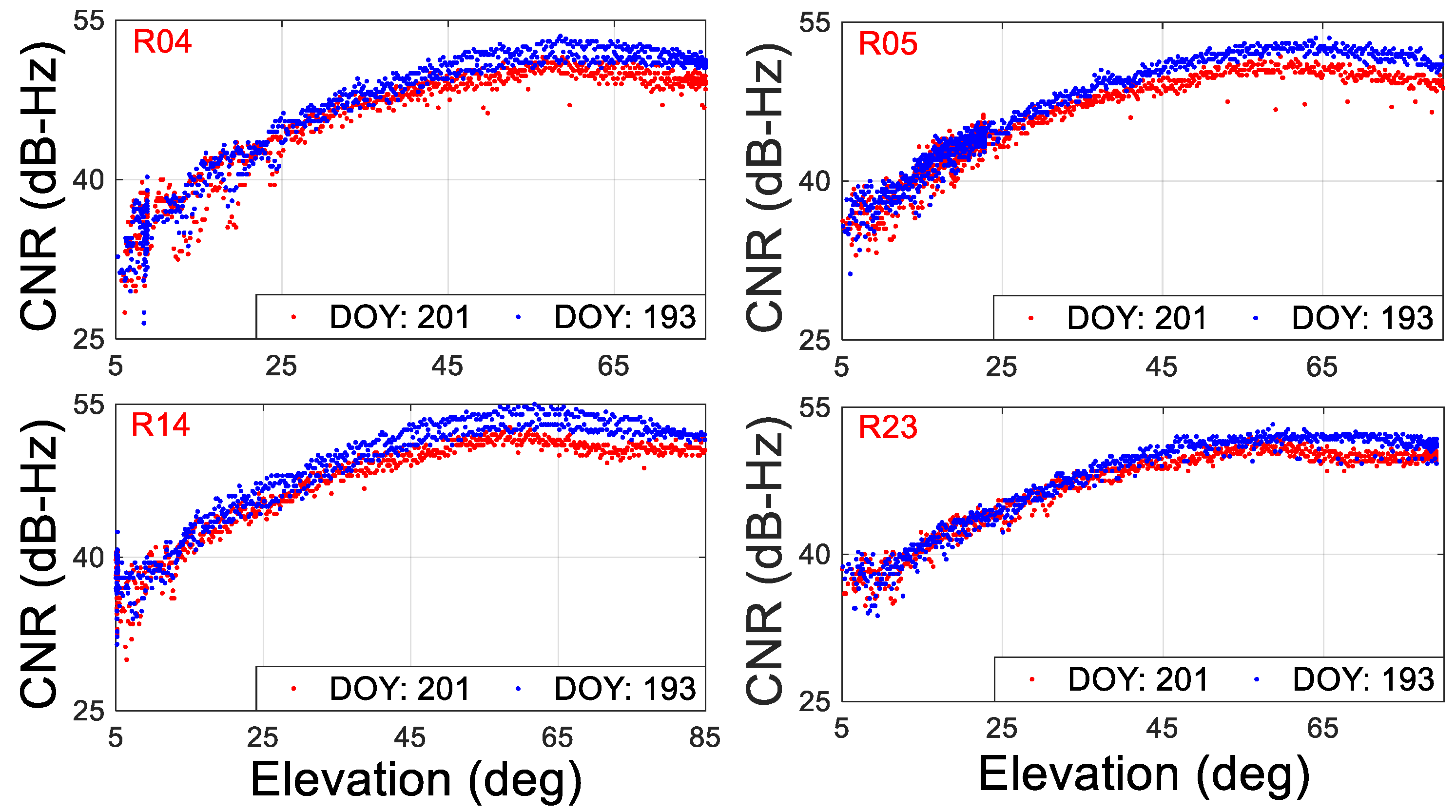
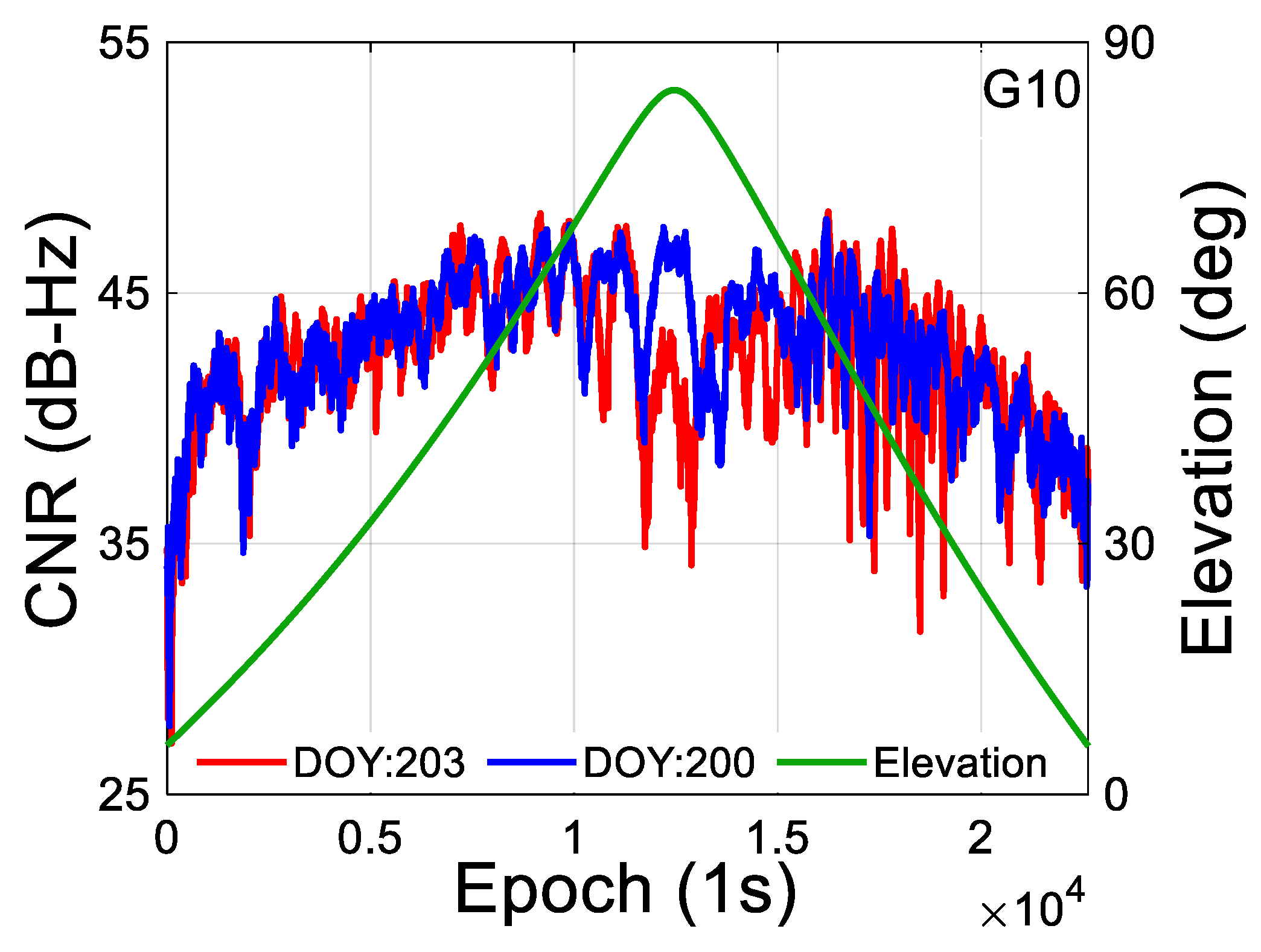
6. Influence of Floods on GPS, GLONASS, and BDS CNR
6.1. Influence of Floods on GPS with 30 s Data Set
6.2. Influence of Floods on GLONASS with 30 s Data Set
6.3. Influence of Floods on GPS with 1 s Data Set
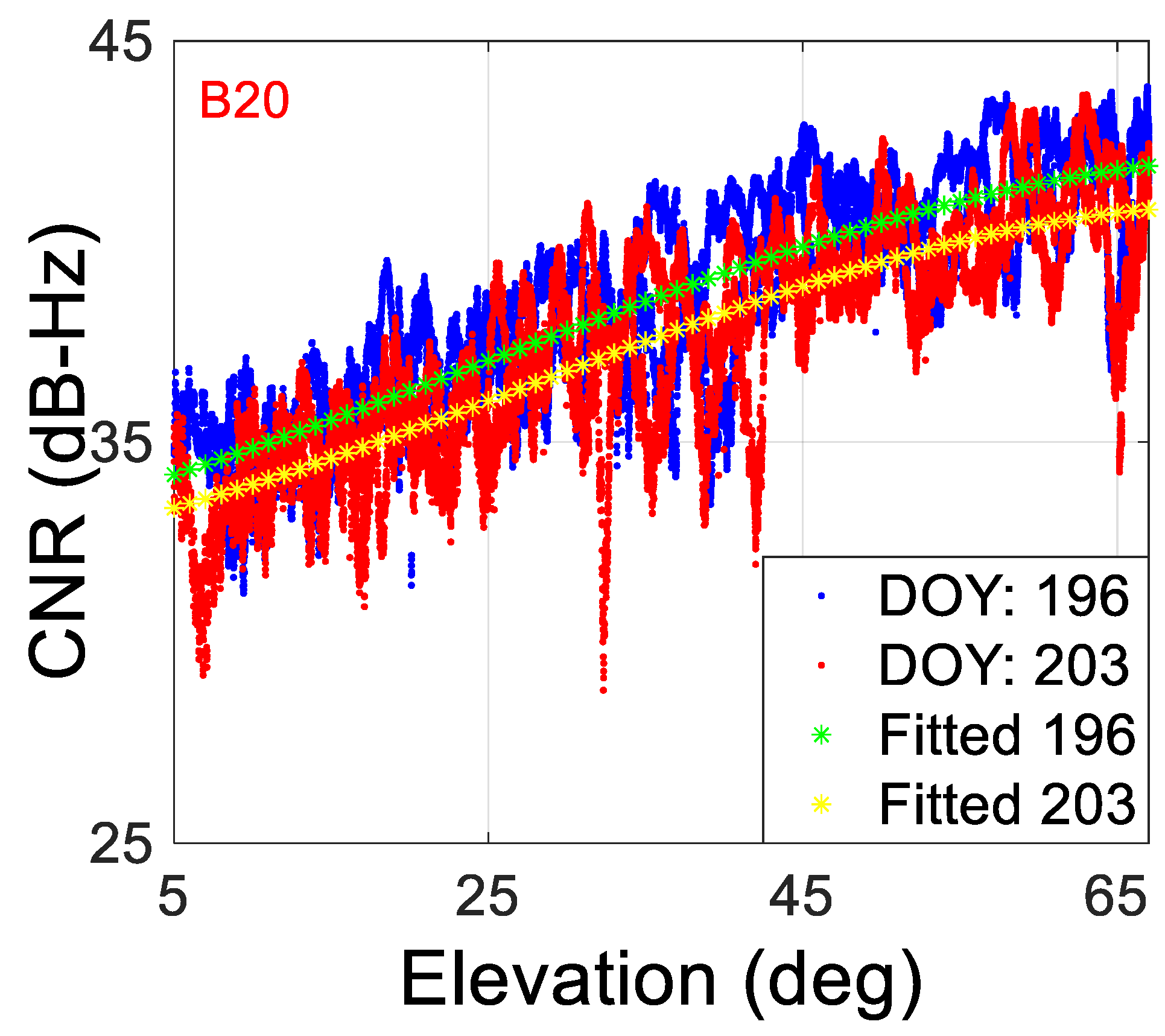
6.4. Influence of Floods on BDS with 1 s Data Set
6.4.1. BDS MEO Satellite
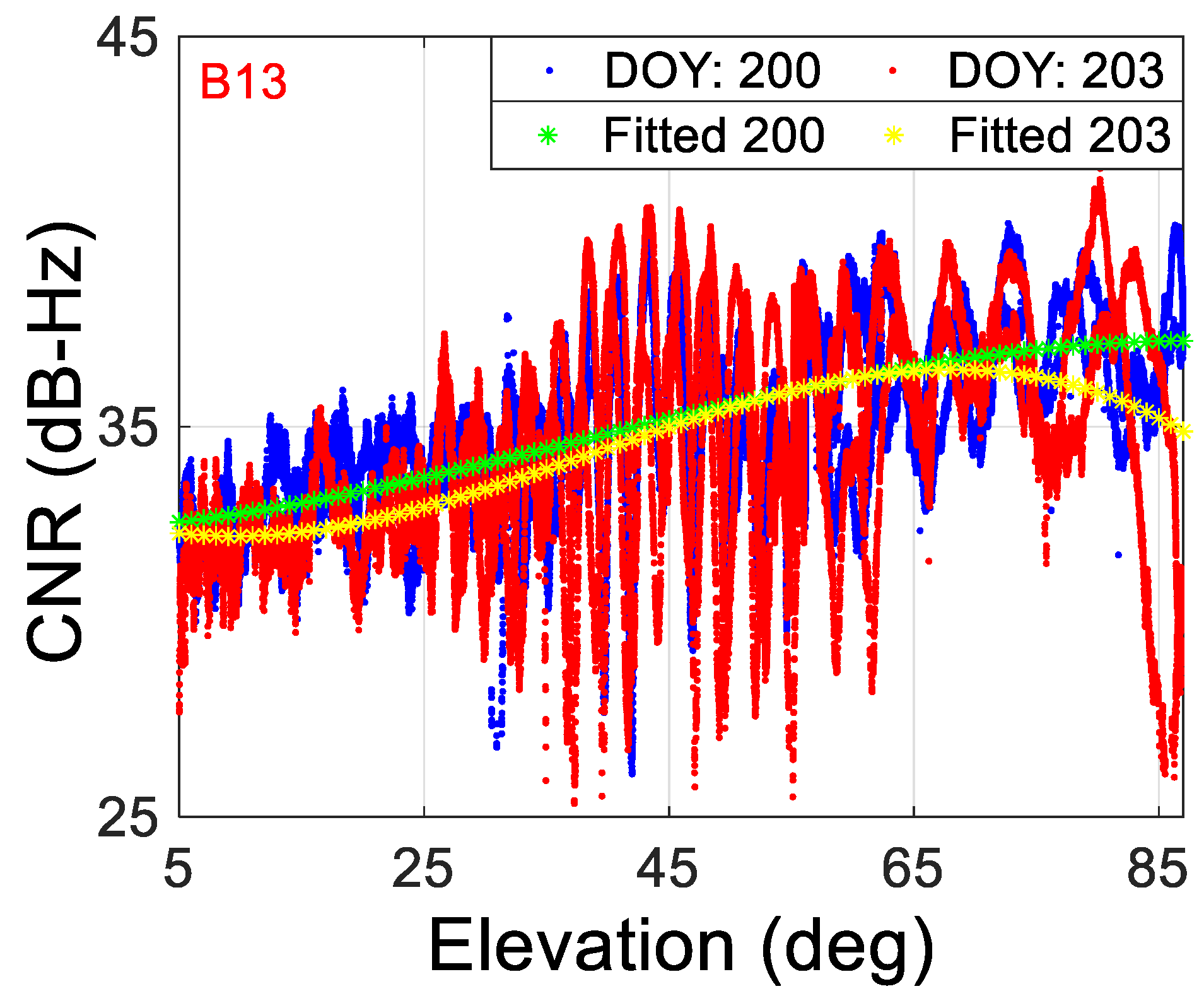
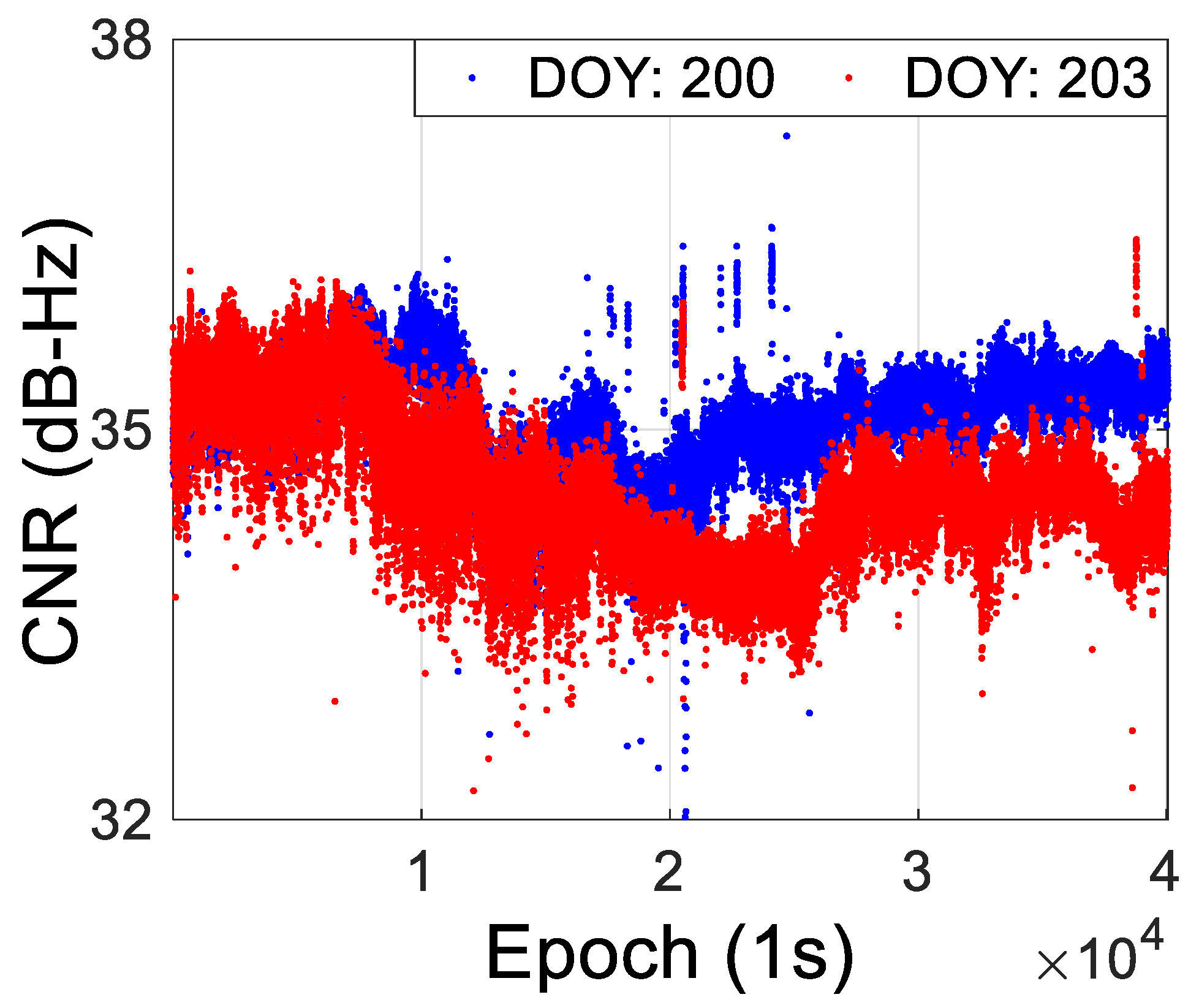
6.4.2. BDS IGSO and GEO Satellite
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wan, W.; Liu, B.; Zeng, Z.; Chen, X.; Wu, G.; Xu, L.; Chen, X.; Hong, Y. Using CYGNSS Data to Monitor China’s Flood Inundation during Typhoon and Extreme Precipitation Events in 2017. Remote Sens. 2019, 11, 854. [Google Scholar] [CrossRef] [Green Version]
- Mahmoud, R.; Hossein, N.; Mostafa, H. Evaluation of CYGNSS Observations for Flood Detection and Mapping during Sistan and Baluchestan Torrential Rain in 2020. Water 2020, 12, 2047. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y.; Pan, L.; Dai, W. An analysis on combined GPS/COMPASS data quality and its effect on single point positioning accuracy under different observing conditions. Adv. Space Res. 2014, 54, 818–829. [Google Scholar] [CrossRef]
- Michael, S. Multipath. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P., Montenbruck, O., Eds.; Springer: New York, NY, USA, 2017; pp. 444–466. [Google Scholar]
- Axelrad, P.; Comp, C.; Macdoran, P. SNR based multipath error correction for GPS differential phase. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 650–660. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Gao, Y.; Shen, Y. Real-time carrier phase multipath detection based on dual-frequency C/N0 data. GPS Solut. 2019, 23, 7. [Google Scholar] [CrossRef]
- Su, M.; Yang, Y.; Qiao, L.; Ma, H.; Feng, W.; Qiu, Z.; Zheng, J. Multipath extraction and mitigation for static relative postitioning based on adaptive layer wavelet packets, bootstrapped searches, and CNR constraints. GPS Solut. 2021, 25, 123. [Google Scholar] [CrossRef]
- Tian, X.; Chai, H.; Xiang, M.; Yin, X.; Wang, M. The analysis and evaluation of the multipath error of the BDS marine measurement. Adv. Space Res. 2022, 71, 496–809. [Google Scholar] [CrossRef]
- Strode, R.; Groves, P. GNSS multipath detection using three-frequency signal-to-noise measurements. GPS Solut. 2016, 20, 399–412. [Google Scholar] [CrossRef] [Green Version]
- Genrich, J.; Bock, Y. Rapid resolution of crustal motion at short ranges with the Global Positioning System. J. Geophys. Res. 1992, 97, 3261–3269. [Google Scholar] [CrossRef]
- Su, M.; Zheng, J.; Yang, Y.; Wu, Q. A new multipath mitigation method based on adaptive thresholding wavelet denoising and double reference shift strategy. GPS Solut. 2018, 22, 40. [Google Scholar] [CrossRef]
- Wang, M.; Wang, J.; Dong, D.; Li, H.; Han, L.; Chen, W. Comparison of Three Methods for Estimating GPS Multipath Repeat Time. Remote Sens. 2018, 10, 6. [Google Scholar] [CrossRef] [Green Version]
- Zandbergen, R.; Dinwiddy, S.; Hahn, J.; Breeuwer, E.; Blonski, D. Galileo orbit selection. In Proceedings of the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 26–29 September 2004; pp. 616–623. [Google Scholar]
- Galileo Satellite Recovered and Transmitting Navigation Signals. Available online: http://www.esa.int/Our_Activities/Navigation/Galileo_satellite_recovered_and_transmitting_navigation_signals (accessed on 20 May 2018).
- Sixth Galileo Satellite Reaches Corrected Orbit. Available online: http://www.esa.int/Our_Activities/Navigation/Galileo/Galileo_Launches/Sixth_Galileo_satellite_reaches_corrected_orbit (accessed on 20 May 2018).
- Wang, K.; Khodabandeh, A.; Teunissen, P. Five-frequency Galileo long-baseline ambiguity resolution with multipath mitigation. GPS Solut. 2018, 22, 75. [Google Scholar] [CrossRef] [Green Version]
- Su, M.; Yang, Y.; Jiang, J. BeiDou system satellite-induced pseudorange multipath bias mitigation based on different orbital characteristic for static applications. IET Radar Sonar Navig. 2019, 14, 242–251. [Google Scholar] [CrossRef]
- Rost, C.; Wanninger, L. Carrier phase multipath mitigation based on GNSS signal quality measurements. J. Appl. Geod. 2009, 3, 81–87. [Google Scholar] [CrossRef]
- Su, M.; Yang, Y.; Qiao, L.; Teng, X.; Song, H. Enhanced multipath mitigation method based on multi-resolution CNR model and adaptive statistical test strategy for real-time kinematic PPP. Adv. Space Res. 2020, 67, 868–882. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, M.; Liu, W.; Li, X.; Yu, S.; Lu, C.; Wickert, J. Initial assessment of the COMPASS/BeiDou-3: New-generation navigation signals. J. Geod. 2017, 91, 1225–1240. [Google Scholar] [CrossRef]
- Yang, J. Spacecraft Orbit Dynamics and Control; China Astronautic Publishing House: Beijing, China, 1995; pp. 196–197. [Google Scholar]
- Su, M.; Feng, J.; Qiao, L.; Qiu, Z.; Zhang, H.; Zheng, J.; Yang, Y. An improved time-domain multipath mitigation method based on the constraint of satellite elevation for low-cost single frequency receiver. Adv. Space Res. 2022, 69, 3597–3608. [Google Scholar] [CrossRef]
- Choi, K.; Bilich, A.; Larson, K.; Axelrad, P. Modified sidereal filtering: Implications for high-rate GPS positioning. Geophys. Res. Lett. 2004, 31, L22608. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Jiang, J.; Su, M. Comparison of Satellite Repeat Shift Time for GPS, BDS, and Galileo Navigation Systems by Three Methods. Algorithms 2020, 12, 233. [Google Scholar] [CrossRef] [Green Version]
- Su, M.; Zheng, F.; Shang, J.; Qiao, L.; Qiu, Z.; Zhang, H.; Zheng, J. Influence of flooding on GPS carrier-to-noise ratio and water content variation analysis: A case study in Zhengzhou, China. GPS Solut. 2022, 27, 21. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface Type | Reflection Coefficient | Attenuation Factor (dB) |
|---|---|---|
| Dry soil | 0.268 | −11.4 |
| Wet soil | 0.691 | −3.21 |
| Grassy field | 0.334 | −9.53 |
| Fresh water | 0.800 | −1.95 |
| Glass | 0.421 | −7.51 |
| Brick | 0.345 | −9.24 |
| Concrete | 0.404 | −7.87 |
| Constellation | i | T |
|---|---|---|
| GPS | 55° | 11 h 58 m |
| GLONASS | 65° | 11 h 16 m |
| Galileo | 56° | 14 h 05 m |
| BDS MEO | 55° | 12 h 53 m |
| BDS IGSO | 55° | 23 h 56 m |
| BDS GEO | 0° | 23 h 56 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, M.; Chang, X.; Zheng, F.; Shang, J.; Qiao, L.; Teng, X.; Sun, M. Theory and Experiment Analysis on the Influence of Floods on a GNSS Pseudo-Range Multipath and CNR Signal Based on Two Cases Study in China. Remote Sens. 2022, 14, 5874. https://doi.org/10.3390/rs14225874
Su M, Chang X, Zheng F, Shang J, Qiao L, Teng X, Sun M. Theory and Experiment Analysis on the Influence of Floods on a GNSS Pseudo-Range Multipath and CNR Signal Based on Two Cases Study in China. Remote Sensing. 2022; 14(22):5874. https://doi.org/10.3390/rs14225874
Chicago/Turabian StyleSu, Mingkun, Xin Chang, Fu Zheng, Junna Shang, Lei Qiao, Xuyang Teng, and Minhong Sun. 2022. "Theory and Experiment Analysis on the Influence of Floods on a GNSS Pseudo-Range Multipath and CNR Signal Based on Two Cases Study in China" Remote Sensing 14, no. 22: 5874. https://doi.org/10.3390/rs14225874
APA StyleSu, M., Chang, X., Zheng, F., Shang, J., Qiao, L., Teng, X., & Sun, M. (2022). Theory and Experiment Analysis on the Influence of Floods on a GNSS Pseudo-Range Multipath and CNR Signal Based on Two Cases Study in China. Remote Sensing, 14(22), 5874. https://doi.org/10.3390/rs14225874