
The Lidargrammetric Model Deformation Method for Altimetric UAV-ALS Data Enhancement


Abstract
:1. Introduction
1.1. ALS Data Accuracy Assessment
- Easting, northing and elevation shifts;
- Heading, roll and pitch shifts;
- Fluctuating easting/northing, elevation, and roll and pitch.
1.2. Lidar and Image Data Integration
1.3. Lidargrammetry
1.4. The Objective of the Research
2. Materials and Methods
- The data are postprocessed and their trajectory data are not accessible;
- It is not possible to enhance the data consistency with the assessable trajectory data applications.
- As height differences of two ALS strips measured in an overlapping area;
- As a height difference between strip side borders and ground control points (GCPs) or existing DTM/DSM.
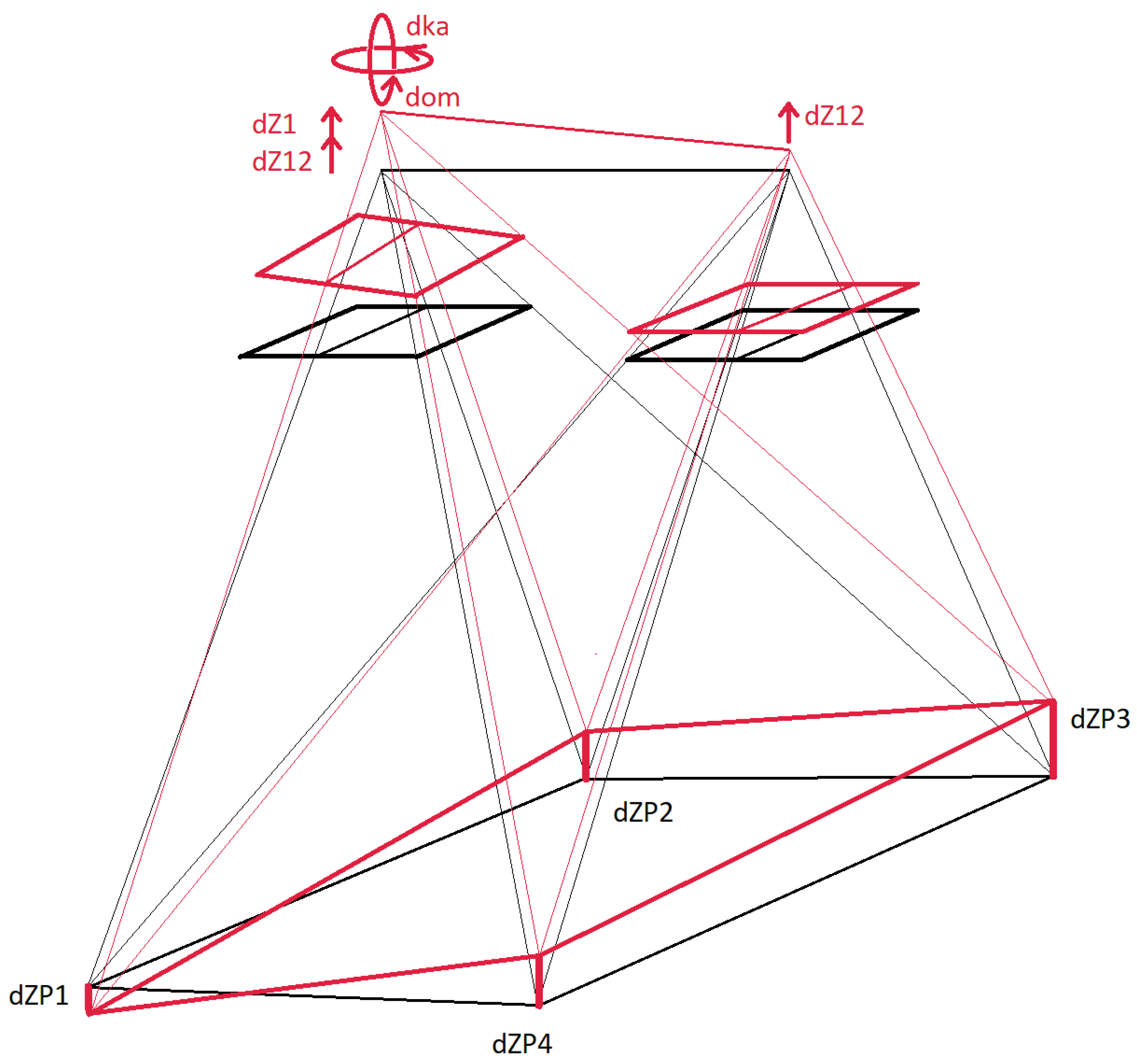
- The first step is to change the height of both projection centres of the lidargrams dZ12 (Figure 3a).
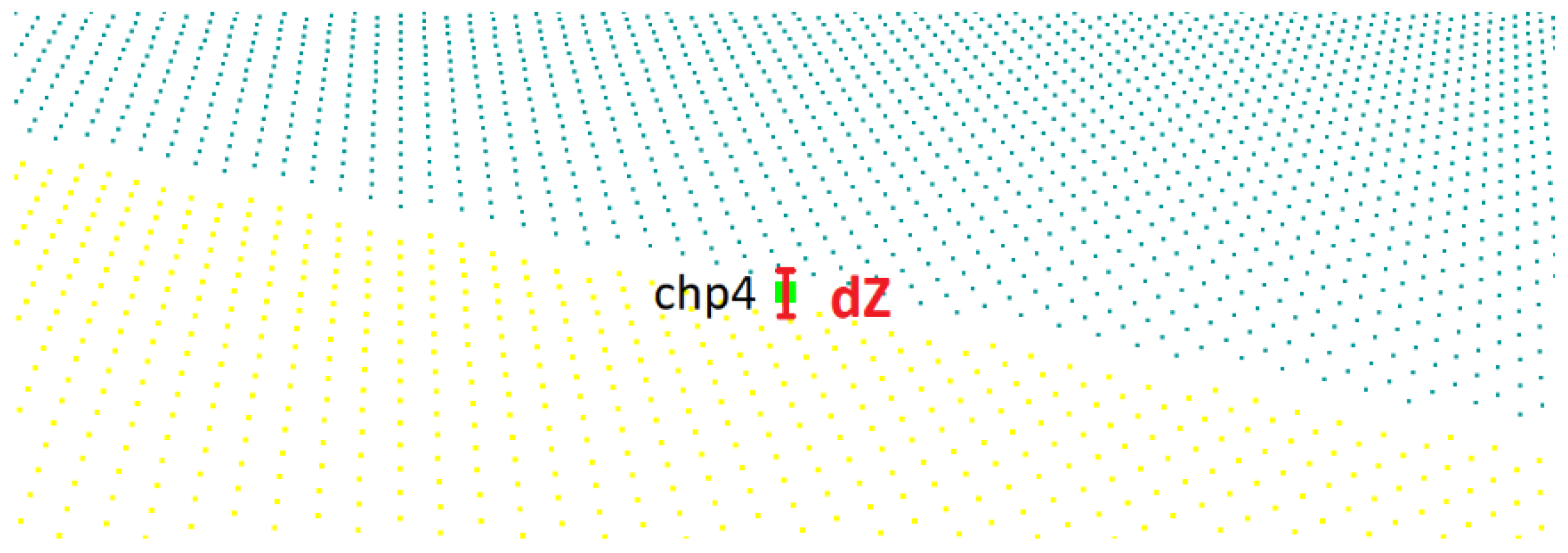
- The second step is to change the height of the centre of the left lidargram dZ1 (Figure 3b).
- The third step is to change the kappa angle of the left lidargram dka (Figure 3c).
- The fourth step is to change the omega angle of the left lidargram dom (Figure 3d).

3. Results and Discussion
3.1. Test 1a. Single Segment Correction Test of Synthetic Data
3.2. Test 1b. Single Segments Correction Test of Real Data
3.3. Test 2a. Segments’ Joint Testing of Synthetic Data
3.4. Test 2b. Segments’ Joint Testing of Real Data
3.5. Test 3a. Testing of Correspondence of Two Parallel Overlapping Strips of Synthetic Data
3.6. Test 3b. Testing of Correspondence of Two Parallel Overlapping Strips of Real Data
3.7. Summary of the Tests
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baltsavias, E.P. A Comparison between Photogrammetry and Laser Scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Burman, H. Adjustment of Laserscanner Data for Correction of Orientation Errors. Iaprs 2000, XXXIII, 125–132. [Google Scholar]
- Hodgson, M.E.; Bresnahan, P. Accuracy of Airborne Lidar-Derived Elevation: Empirical Assessment and Error Budget. Photogramm. Eng. Remote Sens. 2004, 70, 331–339. [Google Scholar] [CrossRef] [Green Version]
- Popescu, G. The Geolocation Accuracy of Lidar Footprint. Bull. Univ. Agric. Sci. Vet. Med. Cluj-Napoca. Hortic. 2014, 71, 143–150. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Höhle, J.; Höhle, M. Accuracy Assessment of Digital Elevation Models by Means of Robust Statistical Methods. ISPRS J. Photogramm. Remote Sens. 2009, 64, 398–406. [Google Scholar] [CrossRef] [Green Version]
- Liu, X. Accuracy Assessment of Lidar Elevation Data Using Survey Marks. Surv. Rev. 2011, 43, 80–93. [Google Scholar] [CrossRef] [Green Version]
- Hladik, C.; Alber, M. Accuracy Assessment and Correction of a LIDAR-Derived Salt Marsh Digital Elevation Model. Remote Sens. Environ. 2012, 121, 224–235. [Google Scholar] [CrossRef]
- Höhle, J. The Assessment of the Absolute Planimetric Accuracy of Airborne Laserscanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-5, 145–150. [Google Scholar] [CrossRef] [Green Version]
- Vosselman, G. Analysis of Planimetric Accuracy of Airborne Laser Scanning Surveys. Archives 2008, XXXVII, 99–104. [Google Scholar]
- Soudarissanane, S.S.; van der Sande, C.J.; Khosh Elham, K. Accuracy Assessment of Airborne Laser Scanning Strips Using Planar Features. In Proceedings of the International Calibration and Orientation Workshop: EUROCOW 2010, Castelldefels, Spain, 10–12 February 2010. [Google Scholar]
- Tulldahl, H.M.; Bissmarck, F.; Larsson, H.; Grönwall, C.; Tolt, G. Accuracy Evaluation of 3D Lidar Data from Small UAV. In Proceedings of the Electro-Optical Remote Sensing, Photonic Technologies, and Applications IX, Toulouse, France, 21 September 2015; Volume 9649, p. 964903. [Google Scholar] [CrossRef]
- Baltsavias, E.P. Airborne Laser Scanning: Basic Relations and Formulas. ISPRS J. Photogramm. Remote Sens. 1999, 54, 199–214. [Google Scholar] [CrossRef]
- Gressin, A.; Mallet, C.; Demantké, J.Ô.; David, N. Towards 3D Lidar Point Cloud Registration Improvement Using Optimal Neighborhood Knowledge. ISPRS J. Photogramm. Remote Sens. 2013, 79, 240–251. [Google Scholar] [CrossRef]
- Pilarska, M.; Ostrowski, W.; Bakuła, K.; Górski, K.; Kurczyński, Z. The Potential of Light Laser Scanners Developed for Unmanned Aerial Vehicles–The Review and Accuracy. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2016, 42, 87–95. [Google Scholar] [CrossRef] [Green Version]
- Zhou, G.; Huang, W.; Zhou, X.; He, C.; Li, X.; Huang, Y.; Zhang, L. A New Approach for Accuracy Improvement of Pulsed LiDAR Remote Sensing Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2018, 42, 2491–2494. [Google Scholar] [CrossRef] [Green Version]
- Csanyi, N.; Toth, C.K. Improvement of Lidar Data Accuracy Using Lidar-Specific Ground Targets. Photogramm. Eng. Remote Sensing 2007, 73, 385–396. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Chen, S.; Xu, J.; Zhang, Y.; Guo, P.; Chen, H. Airborne LiDAR Strip Adjustment Based on Conjugate Linear Features. In Proceedings of the 2012 IEEE International Conference on Imaging Systems and Techniques, Manchester, UK, 16–17 July 2012; pp. 259–262. [Google Scholar] [CrossRef]
- Rentsch, M.; Krzystek, P. Lidar Strip Adjustment with Automatically Reconstructed Roof Shapes. Photogramm. Rec. 2012, 27, 272–292. [Google Scholar] [CrossRef]
- Sanchez, J.; Denis, F.; Checchin, P.; Dupont, F.; Trassoudaine, L. Global Registration of 3D LiDAR Point Clouds Based on Scene Features: Application to Structured Environments. Remote Sens. 2017, 9, 1014. [Google Scholar] [CrossRef] [Green Version]
- Habib, A.F.; Kersting, A.P.; Ruifang, Z.; Al-Durgham, M.; Kim, C.; Lee, D.C. Lidar Strip Adjustment Using Conjugate Linear Features in Overlapping Strips. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 385–390. [Google Scholar]
- Gao, F.; Xu, X.; Zhu, Q.; Wang, L.; He, T.; Wang, L.; Stanič, S.; Hua, D. Evaluation and Improvement of Lidar Performance Based on Temporal and Spatial Variance Calculation. Appl. Sci. 2019, 9, 1786. [Google Scholar] [CrossRef] [Green Version]
- Dreier, A.; Janßen, J.; Kuhlmann, H.; Klingbeil, L. Quality Analysis of Direct Georeferencing in Aspects of Absolute Accuracy and Precision for a Uav-Based Laser Scanning System. Remote Sens. 2021, 13, 3564. [Google Scholar] [CrossRef]
- Fuad, N.A.; Ismail, Z.; Majid, Z.; Darwin, N.; Ariff, M.F.M.; Idris, K.M.; Yusoff, A.R. Accuracy Evaluation of Digital Terrain Model Based on Different Flying Altitudes and Conditional of Terrain Using UAV LiDAR Technology. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012100. [Google Scholar] [CrossRef] [Green Version]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR Derived Canopy Height and DBH with Terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef] [PubMed]
- Kuželka, K.; Slavík, M.; Surový, P. Very High Density Point Clouds from UAV Laser Scanning for Automatic Tree Stem Detection and Direct Diameter Measurement. Remote Sens. 2020, 12, 1236. [Google Scholar] [CrossRef] [Green Version]
- Kubišta, J.; Surový, P. Individual Tree Identification in ULS Point Clouds Using a Crown Width Mixed-Effects Model Based on NFI Data. Remote Sens. 2022, 14, 926. [Google Scholar] [CrossRef]
- Hyyppä, E.; Kukko, A.; Kaartinen, H.; Yu, X.; Muhojoki, J.; Hakala, T.; Hyyppä, J. Direct and Automatic Measurements of Stem Curve and Volume Using a High-Resolution Airborne Laser Scanning System. Sci. Remote Sens. 2022, 5, 100050. [Google Scholar] [CrossRef]
- Terrasolid Ltd. TerraMatch User’s Guide; Terrasolid Ltd., Arttu Soininen; Terrasolid Ltd.: Helsinki, Finland, 2022; Available online: https://terrasolid.com/guides/tmatch.pdf (accessed on 13 December 2022).
- RIEGL Laser Measurement Systems GmbH RiProcess Datasheet_2022-09-01.Pdf. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/RiProcess_Datasheet_2022-09-01.pdf (accessed on 13 December 2022).
- Rzonca, A. Review of Methods of Combined Orientation of Photogrammetric and Laser Scanning Data. Meas. Autom. Monit. 2018, 64, 57–62. [Google Scholar]
- Rönnholm, P.; Haggrén, H. Registration of Laser Scanning Point Clouds and Aerial Images Using Either Artificial or Natural Tie Features. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 63–68. [Google Scholar] [CrossRef] [Green Version]
- Parmehr, E.G.; Fraser, C.S.; Zhang, C.; Leach, J. Automatic Registration of Optical Imagery with 3d Lidar Data Using Local Combined Mutual Information. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 2, 229–234. [Google Scholar] [CrossRef]
- Du, Q.; Xie, D.; Sun, Y. An Automatic High Precision Registration Method between Large Area Aerial Images and Aerial Light Detection and Ranging Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2015, 40, 17–21. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Xie, Y.; Luo, P.; Wang, L. A Dataset for Benchmarking Image-Based Localization. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, CVPR, Honolulu, HI, USA, 21–26 July 2017; pp. 5641–5649. [Google Scholar] [CrossRef]
- Mitishita, E.; Costa, F.; Centeno, J. Lidar and Photogrammetric Datasets Integration Using Sub-Block of Images. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 5, 101–107. [Google Scholar] [CrossRef]
- Eslami, M.; Saadatseresht, M. Imagery Network Fine Registration by Reference Point Cloud Data Based on the Tie Points and Planes. Sensors 2021, 21, 317. [Google Scholar] [CrossRef]
- Habib, A.; Bang, K.; Kersting, A.P. Impact of Lidar System Calibration on the Relative and Absolute Accuracy of Derived Point Cloud. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2010, 38, 17532854. [Google Scholar]
- Armenakis, C.; Gao, Y.; Sohn, G. Co-Registration of Lidar and Photogrammetric Data for Updating Building Databases. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2010, 38, 96–100. [Google Scholar]
- Zhang, Y.J.; Xiong, X.D.; Hu, X.Y. Rigorous LiDAR Strip Adjustment with Triangulated Aerial Imagery. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 2, 361–366. [Google Scholar] [CrossRef]
- Li, J.; Yang, B.; Chen, C.; Habib, A. NRLI-UAV: Non-Rigid Registration of Sequential Raw Laser Scans and Images for Low-Cost UAV LiDAR Point Cloud Quality Improvement. ISPRS J. Photogramm. Remote Sens. 2019, 158, 123–145. [Google Scholar] [CrossRef]
- Ravi, R.; Lin, Y.J.; Elbahnasawy, M.; Shamseldin, T.; Habib, A. Simultaneous System Calibration of a Multi-LiDAR Multicamera Mobile Mapping Platform. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1694–1714. [Google Scholar] [CrossRef]
- Park, Y.; Yun, S.; Won, C.S.; Cho, K.; Um, K.; Sim, S. Calibration between Color Camera and 3D LIDAR Instruments with a Polygonal Planar Board. Sensors 2014, 14, 5333. [Google Scholar] [CrossRef] [Green Version]
- Gharibi, H.; Habib, A. True Orthophoto Generation from Aerial Frame Images and LiDAR Data: An Update. Remote Sens. 2018, 10, 581. [Google Scholar] [CrossRef] [Green Version]
- Parmehr, E.G.; Fraser, C.S.; Zhang, C.; Leach, J. Automatic Registration of Optical Imagery with 3D LiDAR Data Using Statistical Similarity. ISPRS J. Photogramm. Remote Sens. 2014, 88, 28–40. [Google Scholar] [CrossRef]
- Habib, A.; Ghanma, M.; Morgan, M.; Al-Ruzouq, R. Photogrammetric and Lidar Data Registration Using Linear Features. Photogramm. Eng. Remote Sens. 2005, 71, 699–707. [Google Scholar] [CrossRef]
- Yang, Z.; Shen, S. Monocular Visual-Inertial State Estimation with Online Initialization and Camera-IMU Extrinsic Calibration. IEEE Trans. Autom. Sci. Eng. 2017, 14, 39–51. [Google Scholar] [CrossRef]
- Brown, B.J.; Rusinkiewicz, S. Global Non-Rigid Alignment of 3-D Scans. ACM Trans. Graph. 2007, 26, 21. [Google Scholar] [CrossRef]
- Glira, P.; Pfeifer, N.; Mandlburger, G. Rigorous Strip Adjustment of UAV-Based Laserscanning Data Including Time-Dependent Correction of Trajectory Errors. Photogramm. Eng. Remote Sens. 2016, 82, 945–954. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Singh, S. Low-Drift and Real-Time Lidar Odometry and Mapping. Auton. Robots 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Yu, F.; Xiao, J.; Funkhouser, T. Semantic Alignment of LiDAR Data at City Scale. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1722–1731. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Zhu, X.; Nian, X.; Feng, L.; Qu, X.; Mal, T. A Robust Pose Graph Approach for City Scale LiDAR Mapping. In Proceedings of the 2018 IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 1175–1182. [Google Scholar] [CrossRef]
- Allen, B.; Curless, B.; Popović, Z. Articulated Body Deformation from Range Scan Data. In Proceedings of the 29th Annual Conference on Computer Graphics and Interactive Techniques SIGGRAPH ’02, San Antonio, TX, USA, 23–26 July 2002; pp. 612–619. [Google Scholar] [CrossRef]
- Dai, Y.; Li, H.; Kneip, L. Rolling Shutter Camera Relative Pose: Generalized Epipolar Geometry. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4132–4140. [Google Scholar] [CrossRef] [Green Version]
- Park, K.; Kim, S.; Sohn, K. High-Precision Depth Estimation with the 3D LiDAR and Stereo Fusion. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation, Brisbane, Australia, 21–25 May 2018; pp. 2156–2163. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Daniel, S.; Gueriot, D.; Sintes, C.; Le Caillec, J.M. Robust Building-Based Registration of Airborne Lidar Data and Optical Imagery on Urban Scenes. In Proceedings of the International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July 2019; pp. 8474–8477. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Tong, X.; Chen, J.; Liu, X.; Sun, W.; Xie, H.; Chen, P.; Jin, Y.; Ye, Z. A Linear Feature-Based Approach for the Registration of Unmanned Aerial Vehicle Remotely-Sensed Images and Airborne LiDAR Data. Remote Sens. 2016, 8, 82. [Google Scholar] [CrossRef] [Green Version]
- Zhu, B.; Ye, Y.; Yang, C.; Zhou, L.; Liu, H.; Cao, Y. Fast and Robust Registration of Aerial Images and Lidar Data Based on Structural Features and 3D Phase Correlation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 5, 135–141. [Google Scholar] [CrossRef]
- Megahed, Y.; Shaker, A.; Yan, W.Y. A Phase-Congruency-Based Scene Abstraction Approach for 2D-3D Registration of Aerial Optical and LiDAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 964–981. [Google Scholar] [CrossRef]
- Elmstrom, M.D.; Smith, P.W.; Abidi, M.A. Stereo-Based Registration of Ladar and Color Imagery. In Intelligent Robots and Computer Vision XVII: Algorithms, Techniques, and Active Vision; SPIE: Boston, MA, USA, 1998; Volume 3522, pp. 343–354. [Google Scholar] [CrossRef]
- Elstrom, M.D.; Smith, P.W. Stereo-Based Registration of Multi-Sensor Imagery for Enhanced Visualization of Remote Environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; Volume 3, pp. 1948–1953. [Google Scholar] [CrossRef]
- Smith, P.W.M.D.E. Stereo-Based Registration of Range and Projective Imagery for Data Fusion and Visualization. Opt. Eng. 2001, 40, 352. [Google Scholar] [CrossRef]
- Valbuena, R.; Mauro, F.; Arjonilla, F.J.; Manzanera, J.A. Comparing Airborne Laser Scanning-Imagery Fusion Methods Based on Geometric Accuracy in Forested Areas. Remote Sens. Environ. 2011, 115, 1942–1954. [Google Scholar] [CrossRef]
- Fragkos, P.; Ioannidis, C. Assessment of Lidargrammetry for Spatial Data Extraction. In Proceedings of the Fourth International Conference on Remote Sensing and Geoinformation of Environment, Paphos, Cyprus, 4–8 April 2016; Volume 9688, p. 96881L. [Google Scholar] [CrossRef]
- Tack, J.; Graham, L. Applications for LIDAR Imaging. In Proceedings of the ASPRS 2006 Annual Conference, Reno, Nevada, 1–5 May 2006; Volume 3, pp. 1387–1394. [Google Scholar]
- Ray, J.A.; Graham, L. New Horizontal Accuracy Assessment Tools and Techniques for LiDAR Data. In Proceedings of the American Society for Photogrammetry and Remote Sensing-ASPRS Annual Conference 2008: Bridging the Horizons: New Frontiers in Geospatial Collaboration, Portland, OR, USA, 28 April 2008; Volume 2, pp. 583–594. [Google Scholar]
- Graham, L.N.; Kyle Ellison, B.K.H.; Riddell, C.S. Visualization and Storage Algorthms Assocated with Processing Point Cloud Data (76). US Patent US 7,804,4, 28 September 2010. [Google Scholar]
- Brooks, B.M.; Herman, M.F.; Flood, M. Lidargrammetry. Direct Exploitation of Stere o Imagery Generated from Lidar Data ISPRS WGI/2 Banff Workshop 8–10 June 2005. Available online: https://www.isprs.org/proceedings/2005/banff2005/presentations/WG%201-2_10.pdf (accessed on 13 December 2022).
- Ward, D. Lidargrammetry. A Look at a New Approach for Dealing with LiDAR Data, Presentation. 2006. Available online: http://www.fs.fed.us/eng/rsac/RS2006/presentations/ward.pdf (accessed on 15 May 2022).
- Rzonca, A.; Majek, K. Lidarometry as a Variant of Integration of Photogrammetric and Laser Scanning Data. Meas. Autom. Monit. 2016, 62, 268–273. [Google Scholar]
- He, X.; Balz, T.; Zhang, L.; Liao, M. Stereo Radargrammetry in South-East Asia Using Terrasar-X Stripmap Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2010, 38, 270–274. [Google Scholar]
- Collins, S.H. Stereoscopic Orthophoto Maps. Can. Surv. 1968, 22, 167–176. [Google Scholar] [CrossRef]
- Blachut, T.J. Further Extension of the Orthophoto Technique. Can. Surv. 1968, 22, 206–220. [Google Scholar] [CrossRef]
- Collins, S.H. The Ideal Mechanical Parallax for Stereo-Orthophoto. Can. Surv. 1970, 24, 561–568. [Google Scholar] [CrossRef]
- Blachut, T. The Stereo-Orthophoto Technique in Cadastral and General Mapping. Photogramm. Eng. Remote Sensing 1976, 42, 1511–1519. [Google Scholar]
- Li, D.; Wang, M.; Gong, J. Principle of Seamless Stereo Orthoimage Database and Its. Database 2002, 5, 16195507. [Google Scholar]
- Teo, T.A.; Shih, T.Y.; Lin, Y.T.; Huang, C.M. The Generation of Inferred Stereo Images from Lidar Data. In Proceedings of the 31st Asian Conference on Remote Sensing 2010 ACRS, Hanoi, Vietnam, 1–5 November 2010; Volume 1, pp. 459–464. Available online: https://www.researchgate.net/publication/266038829_The_generation_of_inferred_stereo_images_from_lidar_data (accessed on 13 December 2022).
- Rodríguez-Cielos, R.; Galán-García, J.L.; Padilla-Domínguez, Y.; Rodríguez-Cielos, P.; Bello-Patricio, A.B.; López-Medina, J.A. LiDARgrammetry: A New Method for Generating Synthetic Stereoscopic Products from Digital Elevation Models. Appl. Sci. 2017, 7, 906. [Google Scholar] [CrossRef]
- Delaunay, B. Sur La Sphère Vide. Otd. Mat. Estestv. Nauk 1934, 793–800. [Google Scholar]
- Smith, D. Lidargrammetry: Using 3D Stereo Photogrammetry for Lidar Quality Control and Feature Extraction; presentation, Washington GIS Conference. 2013. [Google Scholar]
- Kraus, K. Photogrammetry, 4th ed.; Ferd. Duemmler Verlag: Bonn, Germany, 1993; ISBN 3-427-78684-6. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height Discrep. | ftp1 [m] | ftp2 [m] | ftp3 [m] | ftp4 [m] |
| Before process | −0.100 | 0.400 | 0.200 | −0.300 |
| After 1st iteration | 0.000 | 0.000 | −0.028 | −0.028 |
| Final result | 0.000 | 0.000 | 0.000 | 0.000 |
| ROP corrections: | dZ12 [m] | dZ1 [m] | dka [deg] | dom [deg] |
| 0.150 | −0.228 | −0.00201 | −0.01005 |
| Height Discrep. | # of Segment | ftp1 [m] | ftp2 [m] | ftp3 [m] | ftp4 [m] | ftp5 [m] | ftp6 [m] | ftp7 [m] | ftp8 [m] | ftp9 [m] | ftp10 [m] |
| Before process | 1 | 0.2 | 0.61 | 0.1 | 0.894 | - | - | - | - | - | - |
| 2 | - | - | 0.1 | 0.894 | 0.6 | 0.69 | - | - | - | - | |
| 3 | - | - | - | - | 0.6 | 0.69 | 0.681 | 0.753 | - | - | |
| 4 | - | - | - | - | - | - | 0.681 | 0.753 | 0.789 | 0.637 | |
| After 1st iteration | 1 | 0.001 | −0.0 | −0.003 | −0.009 | - | - | - | - | ||
| 2 | - | - | 0.009 | −0.021 | −0.012 | −0.072 | - | - | |||
| 3 | - | - | - | - | 0.013 | −0.016 | 0.005 | −0.005 | |||
| 4 | - | - | - | - | - | - | 0.0 | 0.002 | 0.001 | −0.005 | |
| After 2nd iteration | 1 | 0.000 | 0.000 | 0.000 | 0.000 | - | - | - | - | - | - |
| 2 | - | - | −0.003 | 0.003 | −0.006 | 0.002 | - | - | - | - | |
| 3 | - | - | - | - | 0.000 | 0.000 | 0.000 | 0.000 | - | - | |
| 4 | - | - | - | - | - | - | 0.000 | 0.000 | 0.001 | −0.001 | |
| After 3rd iteration (final result) | 1 | 0.000 | 0.000 | 0.000 | 0.000 | - | - | - | - | - | - |
| 2 | - | - | 0.000 | 0.000 | 0.000 | 0.000 | - | - | - | - | |
| 3 | - | - | - | - | 0.000 | 0.000 | 0.000 | 0.000 | - | - | |
| 4 | - | - | - | - | - | - | 0.000 | 0.000 | 0.000 | 0.000 | |
| ROP corrections: | # of segment | dZi(i + 1) [m] | dZi [m] | dka [deg] | dom [deg] | ||||||
| 1 | 0.427 | 0.038 | 0.00302 | −0.00755 | |||||||
| 2 | 0.465 | 0.134 | 0.00587 | 0.01389 | |||||||
| 3 | 0.640 | 0.076 | 0.00054 | 0.00039 | |||||||
| 4 | 0.717 | −0.013 | 0.00041 | 0.00363 |
| chp1 [m] | chp2 [m] | chp3 [m] | chp4 [m] | chp5 [m] | chp6 [m] | chp7 [m] | chp8 [m] | |
|---|---|---|---|---|---|---|---|---|
| Height discrep. | 0.003 | 0.005 | −0.001 | −0.001 | −0.005 | 0.004 | 0.003 | −0.003 |
| Height std. dev. | 0.006 | 0.095 | 0.357 | 0.074 | 0.271 | 0.352 | 0.456 | 0.031 |
| Height Discrep. | # of Segment | chp1 [m] | chp2 [m] | chp3 [m] | chp4 [m] | chp5 [m] | chp6 [m] | chp7 [m] |
|---|---|---|---|---|---|---|---|---|
| 1 | −0.0 | 0.001 | 0.001 | −0.025 | ||||
| 2 | 0.027 | 0.001 | 0.0 | 0.001 |
| Height Discrep. | Strip | chp1 [m] | chp2 [m] |
|---|---|---|---|
| 1 | 0.001 | 0.001 | |
| 2 | 0.001 | 0.002 |
| Height Discrep. | Strip | chp1 [m] | chp2 [m] | chp3 [m] |
|---|---|---|---|---|
| 1 | 0.015 | 0.015 | 0.000 | |
| 2 | 0.015 | 0.015 | 0.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rzonca, A.; Twardowski, M. The Lidargrammetric Model Deformation Method for Altimetric UAV-ALS Data Enhancement. Remote Sens. 2022, 14, 6391. https://doi.org/10.3390/rs14246391
Rzonca A, Twardowski M. The Lidargrammetric Model Deformation Method for Altimetric UAV-ALS Data Enhancement. Remote Sensing. 2022; 14(24):6391. https://doi.org/10.3390/rs14246391
Chicago/Turabian StyleRzonca, Antoni, and Mariusz Twardowski. 2022. "The Lidargrammetric Model Deformation Method for Altimetric UAV-ALS Data Enhancement" Remote Sensing 14, no. 24: 6391. https://doi.org/10.3390/rs14246391
APA StyleRzonca, A., & Twardowski, M. (2022). The Lidargrammetric Model Deformation Method for Altimetric UAV-ALS Data Enhancement. Remote Sensing, 14(24), 6391. https://doi.org/10.3390/rs14246391