
A Graph Convolutional Incorporating GRU Network for Landslide Displacement Forecasting Based on Spatiotemporal Analysis of GNSS Observations




Abstract
:1. Introduction
2. Methods
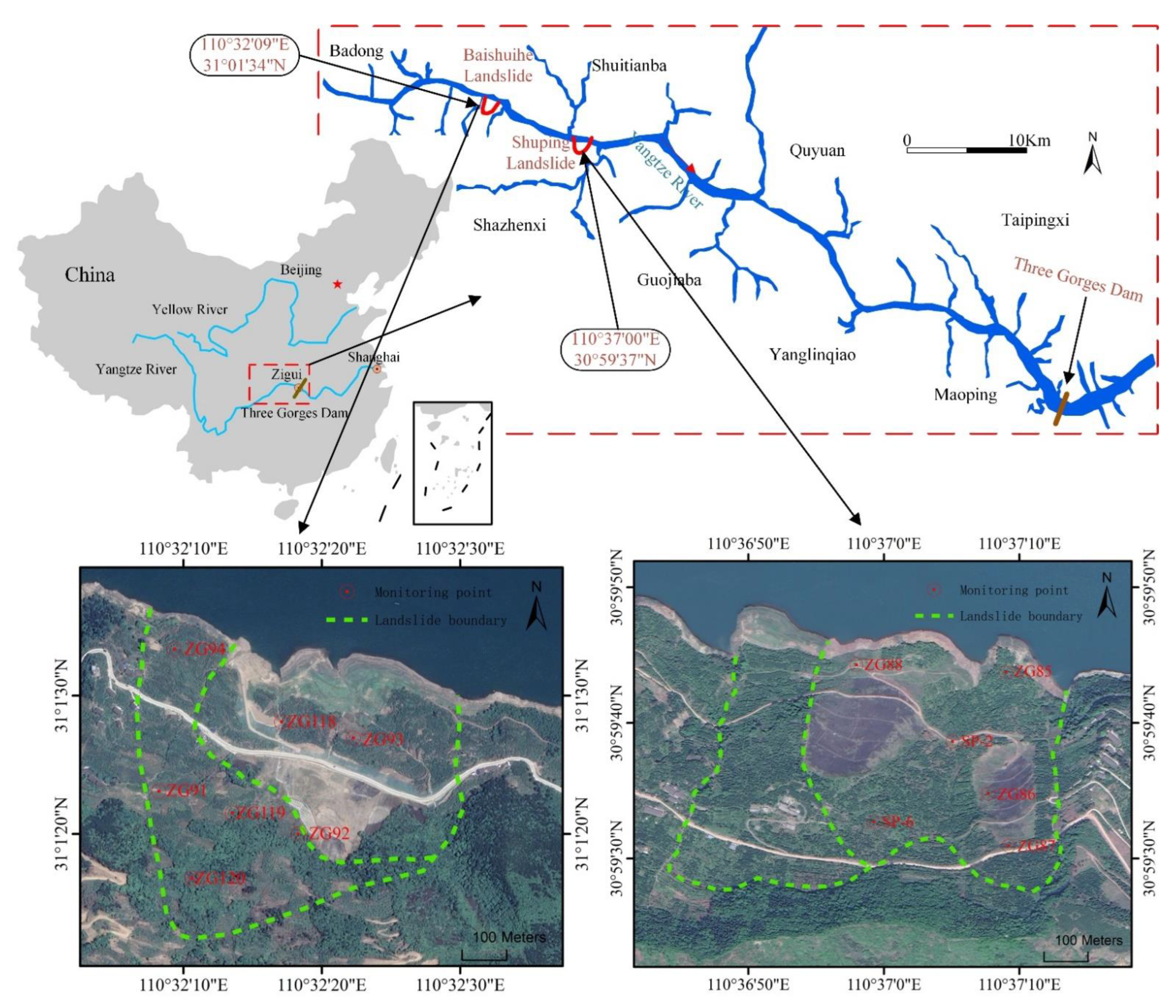
2.1. Study Area and Dataset
- (1)
- The TGR became fully operational in November 2008 when its highest water level reached 175 m. Since then, the reservoir water level has fluctuated between 145 m and 175 m in a year, exhibiting seasonal changes due to artificial flood control.
- (2)
- The rainy season of the study area lasts from June to October each year. The rainfall data also display seasonal variations due to monsoon influences. In contrast, the reservoir began impounding at the end of the wet season in October and quickly reached the maximum water level and maintained this from November to February, with a cycle opposite to the precipitation conditions.
- (3)
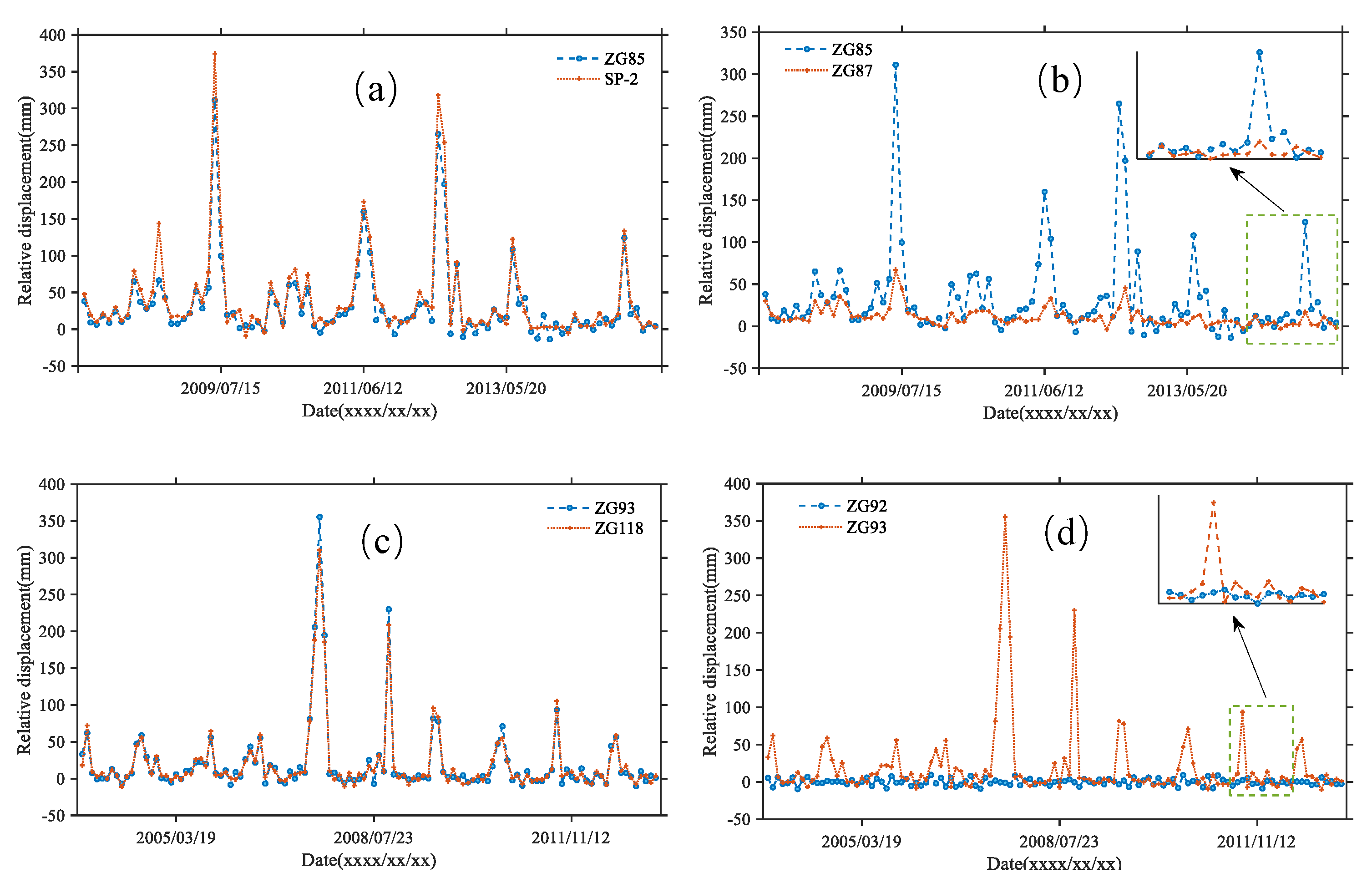
- The historical GNSS measurements of both landslides also show evident seasonal patterns. The displacements increase from April to September per year and remain relatively stable from October to April in the next subsequent year. The displacements rise with the drawdown of the reservoir water level and during the period of increased rainfall in the wet season.
2.2. Data Processing
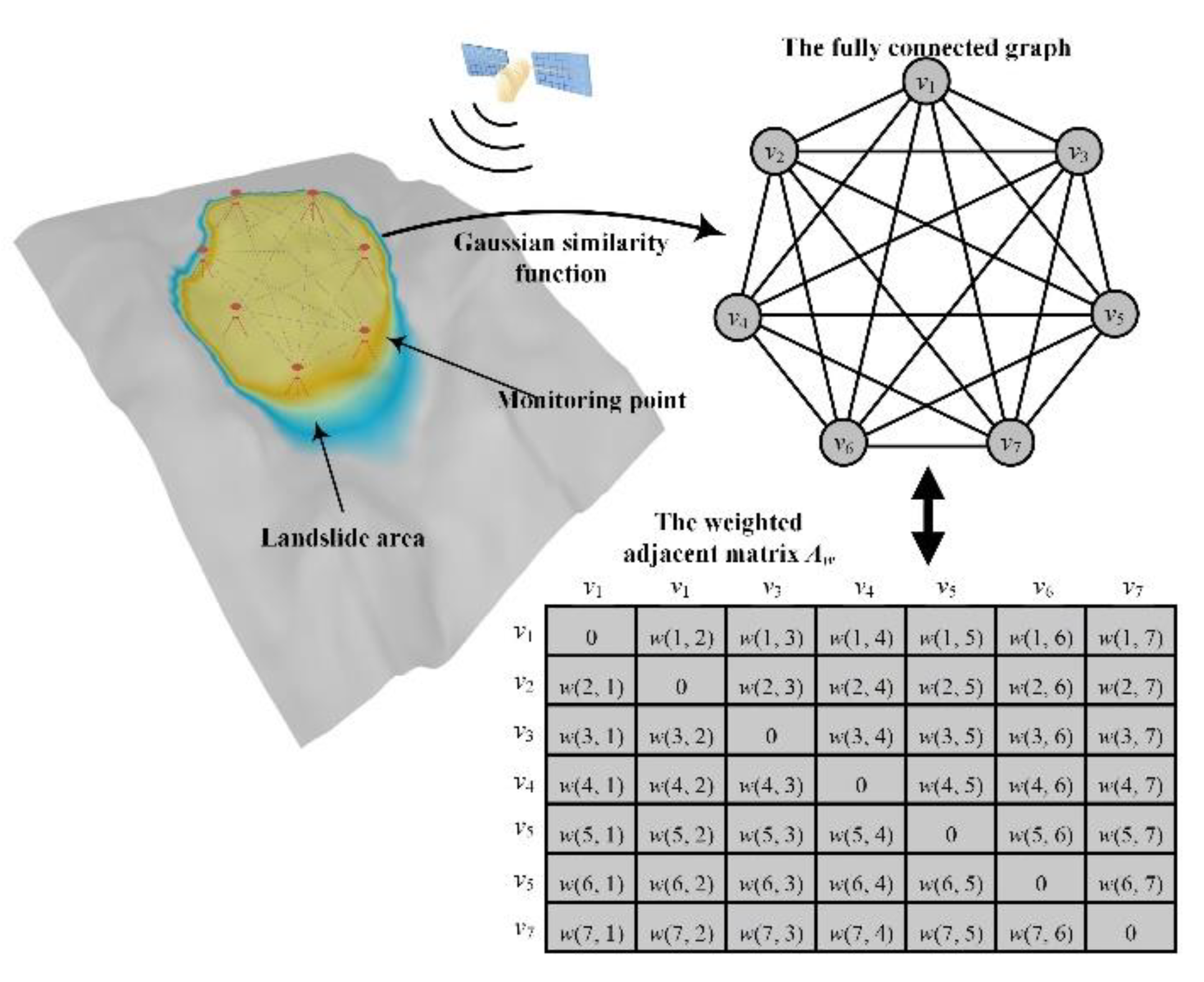
2.2.1. Representation of the Spatial Correlation
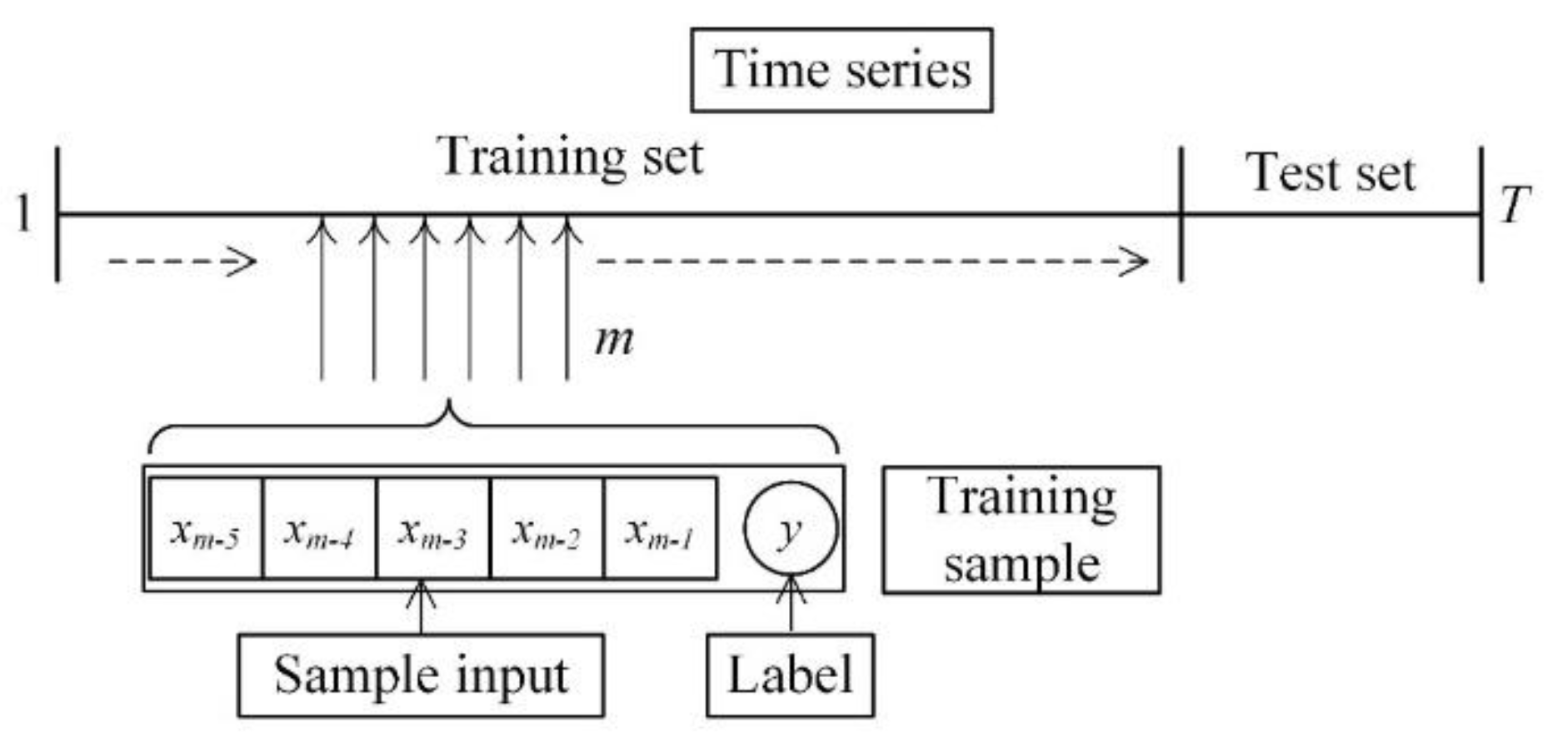
2.2.2. Representation of the Temporal Correlation
2.2.3. Attribute Augmentation by Incorporating External Factors
2.3. Data Modelling
2.3.1. Spatial Dependence Modeling by GCN
2.3.2. Temporal Dependence Model by GRU
2.3.3. Spatiotemporal Model Using GC-GRU-N
2.3.4. Evaluation Metrics of the Prediction
3. Experiments and Results
3.1. Analysis of the Spatiotemporal Correlation
3.2. Model and Parameter Setting
3.2.1. Model Inputs
3.2.2. Model Parameters and Settings
3.3. Predicted Results and Analysis
3.3.1. Predicted Results Using the GC-GRU-N
3.3.2. Comparative Experiments
3.3.3. Ablation Experiment and Analysis
4. Discussion
4.1. Advantage of the Proposed Method
4.2. Shortcoming and Outlook of the Proposed Method
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Runqiu, H. Some Catastrophic Landslides since the Twentieth Century in the Southwest of China. Landslides 2009, 6, 69–81. [Google Scholar] [CrossRef]
- Hu, X.; Bürgmann, R.; Schulz, W.H.; Fielding, E.J. Fielding. Four-Dimensional Surface Motions of the Slumgullion Landslide and Quantification of Hydrometeorological Forcing. Nat. Commun. 2020, 11, 2792–2801. [Google Scholar] [CrossRef] [PubMed]
- Fan, X.; Scaringi, G.; Korup, O.; West, A.J.; van Westen, C.J.; Tanyas, H.; Hovius, N.; Hales, T.C.; Jibson, R.W.; Allstadt, K.E.; et al. Earthquake-Induced Chains of Geologic Hazards: Patterns, Mechanisms, and Impacts. Rev. Geophys. 2019, 57, 421–503. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Xu, Q.; Lu, Z.; Luo, H.; Liao, L.; Dong, X. Modelling and Predicting Landslide Displacements and Uncertainties by Multiple Machine-Learning Algorithms: Application to Baishuihe Landslide in Three Gorges Reservoir, China. Geomat. Nat. Hazards Risk 2021, 12, 741–762. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Mei, G. Deep Learning for Geological Hazards Analysis: Data, Models, Applications, and Opportunities. Earth Sci. Rev. 2021, 223, 103858. [Google Scholar] [CrossRef]
- Krkač, M.; Bernat Gazibara, S.; Arbanas, Ž.; Sečanj, M.; Mihalić Arbanas, S. A Comparative Study of Random Forests and Multiple Linear Regression in the Prediction of Landslide Velocity. Landslides 2020, 17, 2515–2531. [Google Scholar] [CrossRef]
- Zhang, G.P. Time Series Forecasting Using a Hybrid ARIMA and Neural Network Model. Neurocomputing 2003, 50, 159–175. [Google Scholar] [CrossRef]
- Zhang, Y.; Tang, J.; He, Z.; Tan, J.; Li, C. A Novel Displacement Prediction Method Using Gated Recurrent Unit Model with Time Series Analysis in the Erdaohe Landslide. Nat. Hazards 2021, 105, 783–813. [Google Scholar] [CrossRef]
- Xu, S.; Niu, R. Displacement Prediction of Baijiabao Landslide Based on Empirical Mode Decomposition and Long Short-Term Memory Neural Network in Three Gorges Area, China. Comput. Geosci. 2018, 111, 87–96. [Google Scholar] [CrossRef]
- Li, H.; Xu, Q.; He, Y.; Fan, X.; Li, S. Modeling and Predicting Reservoir Landslide Displacement with Deep Belief Network and EWMA Control Charts: A Case Study in Three Gorges Reservoir. Landslides 2020, 17, 693–707. [Google Scholar] [CrossRef]
- Han, H.; Shi, B.; Zhang, L. Prediction of Landslide Sharp Increase Displacement by SVM with Considering Hysteresis of Groundwater Change. Eng. Geol. 2021, 280, 105876. [Google Scholar] [CrossRef]
- Lv, M.; Hong, Z.; Chen, L.; Chen, T.; Zhu, T.; Ji, S. Temporal Multi-Graph Convolutional Network for Traffic Flow Prediction. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3337–3348. [Google Scholar] [CrossRef]
- Huang, Y.; Han, X.; Zhao, L. Recurrent Neural Networks for Complicated Seismic Dynamic Response Prediction of a Slope System. Eng. Geol. 2021, 289, 106198. [Google Scholar] [CrossRef]
- Chen, P.; Fu, X.; Wang, X. A Graph Convolutional Stacked Bidirectional Unidirectional-LSTM Neural Network for Metro Ridership Prediction. IEEE Trans. Intell. Transp. Syst. 2021, 1–13. [Google Scholar] [CrossRef]
- Navarin, N.; Van Tran, D.; Sperduti, A. Universal Readout for Graph Convolutional Neural Networks. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Panahi, M.; Sadhasivam, N.; Pourghasemi, H.R.; Rezaie, F.; Lee, S. Spatial Prediction of Groundwater Potential Mapping Based on Convolutional Neural Network (CNN) and Support Vector Regression (SVR). J. Hydrol. 2020, 588, 125033. [Google Scholar] [CrossRef]
- Jepsen, T.S.; Jensen, C.S.; Nielsen, T.D. Relational Fusion Networks: Graph Convolutional Networks for Road Networks. IEEE Trans. Intell. Transp. Syst. 2020, 23, 418–429. [Google Scholar] [CrossRef]
- Jiang, Y.; Liao, M.; Zhou, Z.; Shi, X.; Zhang, L.; Balz, T. Landslide Deformation Analysis by Coupling Deformation Time Series from SAR Data with Hydrological Factors through Data Assimilation. Remote Sens. 2016, 8, 179. [Google Scholar] [CrossRef] [Green Version]
- Jiang, C.; Fan, W.; Yu, N.; Liu, E. Spatial Modeling of Gully Head Erosion on the Loess Plateau Using a Certainty Factor and Random Forest Model. Sci. Total Environ. 2021, 783, 147040. [Google Scholar] [CrossRef]
- Deng, L.; Smith, A.; Dixon, N.; Yuan, H. Machine Learning Prediction of Landslide Deformation Behaviour Using Acoustic Emission and Rainfall Measurements. Eng. Geol. 2021, 106315. [Google Scholar] [CrossRef]
- Hu, X.; Wu, S.; Zhang, G.; Zheng, W.; Liu, C.; He, C.; Liu, Z.; Guo, X.; Zhang, H. Landslide Displacement Prediction Using Kinematics-Based Random Forests Method: A Case Study in Jinping Reservoir Area, China. Eng. Geol. 2021, 283, 105975. [Google Scholar] [CrossRef]
- Long, J.; Li, C.; Liu, Y.; Feng, P.; Zuo, Q. A Multi-Feature Fusion Transfer Learning Method for Displacement Prediction of Rainfall Reservoir-Induced Landslide with Step-like Deformation Characteristics. Eng. Geol. 2022, 297, 106494. [Google Scholar] [CrossRef]
- Shin, Y.; Yoon, Y. Incorporating Dynamicity of Transportation Network With Multi-Weight Traffic Graph Convolutional Network for Traffic Forecasting. IEEE Trans. Intell. Transp. Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Ma, Z.; Mei, G.; Prezioso, E.; Zhang, Z.; Xu, N. A Deep Learning Approach Using Graph Convolutional Networks for Slope Deformation Prediction Based on Time-Series Displacement Data. Neural Comput. Appl. 2021, 33, 14441–14457. [Google Scholar] [CrossRef]
- Yao, X.; Gao, Y.; Zhu, D.; Manley, E.; Wang, J.; Liu, Y. Spatial Origin-Destination Flow Imputation Using Graph Convolutional Networks. IEEE Trans. Intell. Transp. Syst. 2020, 22, 7474–7484. [Google Scholar] [CrossRef]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning Long-Term Dependencies with Gradient Descent Is Difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Cho, K.; van Merrienboer, B.; Bahdanau, D.; Bengio, Y. On the Properties of Neural Machine Translation: Encoder-Decoder Approaches. arXiv 2014, arXiv:1409.1259. [Google Scholar]
- Man, J.; Dong, H.; Yang, X.; Meng, Z.; Jia, L.; Qin, Y.; Xin, G. GCG: Graph Convolutional Network and Gated Recurrent Unit Method for High-Speed Train Axle Temperature Forecasting. Mech. Syst. Signal Process. 2022, 163, 108102. [Google Scholar] [CrossRef]
- Hyndman, R.J.; Koehler, A.B. Another Look at Measures of Forecast Accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef] [Green Version]
- Qinghao, L.I.U.; Yonghong, Z.; Min, D.; Hongan, W.U.; Yonghui, K.; Jujie, W.E.I. Time Series Prediction Method of Large-Scale Surface Subsidence Based on Deep Learning. Acta Geod. Cartogr. Sin. 2021, 50, 396. [Google Scholar] [CrossRef]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Deng, M.; Li, H. T-GCN: A Temporal Graph Convolutional Network for Traffic Prediction. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3848–3858. [Google Scholar] [CrossRef] [Green Version]
- Rashid, K.M.; Louis, J. Times-Series Data Augmentation and Deep Learning for Construction Equipment Activity Recognition. Adv. Eng. Inform. 2019, 42, 100944. [Google Scholar] [CrossRef]
- Creswell, A.; White, T.; Dumoulin, V.; Arulkumaran, K.; Sengupta, B.; Bharath, A.A. Generative Adversarial Networks: An Overview. IEEE Signal Process. Mag. 2018, 35, 53–65. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Hao, H.; Gu, Q.; Wang, D.; Hu, X. A Transfer Learning Method for Automatic Identification of Sandstone Microscopic Images. Comput. Geosci. 2017, 103, 111–121. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point | ZG85 | ZG86 | ZG87 | ZG88 | SP-2 | SP-6 |
|---|---|---|---|---|---|---|
| ZG85 | 1 | 0.78 | 0.87 | 0.82 | 0.80 | 0.84 |
| ZG86 | 0.78 | 1 | 0.88 | 0.75 | 0.86 | 0.85 |
| ZG87 | 0.87 | 0.88 | 1 | 0.88 | 0.87 | 0.88 |
| ZG88 | 0.82 | 0.75 | 0.88 | 1 | 0.83 | 0.82 |
| SP-2 | 0.80 | 0.86 | 0.87 | 0.83 | 1 | 0.75 |
| SP-6 | 0.84 | 0.85 | 0.88 | 0.82 | 0.75 | 1 |
| Point | ZG91 | ZG92 | ZG93 | ZG94 | ZG118 | ZG119 | ZG120 |
|---|---|---|---|---|---|---|---|
| ZG91 | 1.00 | 0.69 | 0.51 | 0.76 | 0.52 | 0.79 | 0.77 |
| ZG92 | 0.69 | 1.00 | 0.54 | 0.70 | 0.57 | 0.65 | 0.65 |
| ZG93 | 0.51 | 0.54 | 1.00 | 0.59 | 0.74 | 0.54 | 0.59 |
| ZG94 | 0.76 | 0.70 | 0.59 | 1.00 | 0.59 | 0.72 | 0.71 |
| ZG118 | 0.52 | 0.57 | 0.74 | 0.59 | 1.00 | 0.55 | 0.54 |
| ZG119 | 0.79 | 0.65 | 0.54 | 0.72 | 0.55 | 1.00 | 0.68 |
| ZG120 | 0.77 | 0.65 | 0.59 | 0.71 | 0.54 | 0.68 | 1.00 |
| Model | Evaluation Index | Average Time | |||||
|---|---|---|---|---|---|---|---|
| Baishuihe | Shuping | ||||||
| MAE/mm | MASE | RMSE/mm | MAE/mm | MASE | RMSE/mm | ||
| The proposed | 3.682 | 0.477 | 4.429 | 6.123 | 0.353 | 8.321 | 44.88 s |
| T-GCN | 4.707 | 0.61 | 6.183 | 7.071 | 0.401 | 9.796 | 19.93 s |
| MLR | 7.514 | 0.974 | 12.319 | 13.548 | 0.782 | 17.566 | 986.435 s |
| ARIMA | 6.718 | 0.87 | 10.041 | 10.953 | 0.632 | 13.917 | 0.534 h |
| SVR | 6.765 | 0.877 | 10.512 | 13.936 | 0.804 | 16.734 | 349.971 s |
| LSTM | 5.981 | 0.727 | 8.401 | 8.825 | 0.509 | 12.788 | 229.936 s |
| Evaluation Index | T-GCN | The Proposed Model (the Baishuihe Landslide) | ||
|---|---|---|---|---|
| Rainfall | R.w.l | Both Factors | ||
| MAE/mm | 4.707 | 3.724 | 3.704 | 3.682 |
| MASE | 0.610 | 0.491 | 0.489 | 0.477 |
| RMSE/mm | 6.183 | 4.442 | 4.434 | 4.429 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Luo, H.; Xu, Q.; Lu, Z.; Liao, L.; Li, H.; Hao, L. A Graph Convolutional Incorporating GRU Network for Landslide Displacement Forecasting Based on Spatiotemporal Analysis of GNSS Observations. Remote Sens. 2022, 14, 1016. https://doi.org/10.3390/rs14041016
Jiang Y, Luo H, Xu Q, Lu Z, Liao L, Li H, Hao L. A Graph Convolutional Incorporating GRU Network for Landslide Displacement Forecasting Based on Spatiotemporal Analysis of GNSS Observations. Remote Sensing. 2022; 14(4):1016. https://doi.org/10.3390/rs14041016
Chicago/Turabian StyleJiang, Yanan, Huiyuan Luo, Qiang Xu, Zhong Lu, Lu Liao, Huajin Li, and Lina Hao. 2022. "A Graph Convolutional Incorporating GRU Network for Landslide Displacement Forecasting Based on Spatiotemporal Analysis of GNSS Observations" Remote Sensing 14, no. 4: 1016. https://doi.org/10.3390/rs14041016
APA StyleJiang, Y., Luo, H., Xu, Q., Lu, Z., Liao, L., Li, H., & Hao, L. (2022). A Graph Convolutional Incorporating GRU Network for Landslide Displacement Forecasting Based on Spatiotemporal Analysis of GNSS Observations. Remote Sensing, 14(4), 1016. https://doi.org/10.3390/rs14041016