
Radar Signal Intrapulse Modulation Recognition Based on a Denoising-Guided Disentangled Network

 ,
,
Abstract
:1. Introduction
- (1)
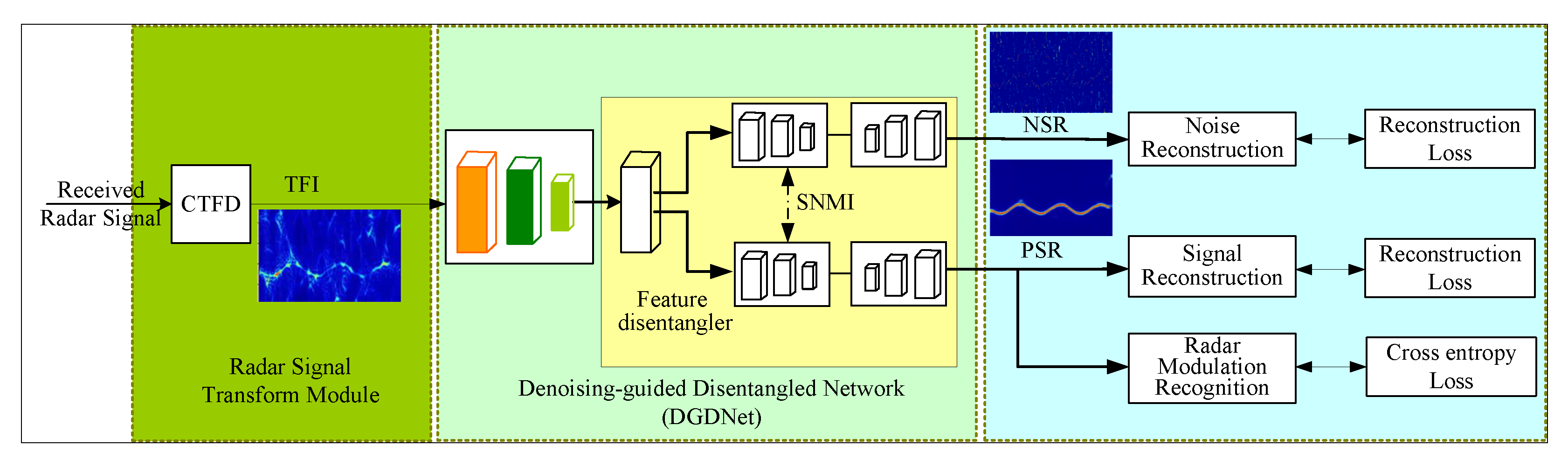
- We propose the DGDNet to simultaneously complete the denoising and recognition of noisy TFIs in an end-to-end manner;
- (2)
- We propose a feature disentangler to extract PSR from NSR and design the SNMI loss to obtain discriminative radar signal feature representation;
- (3)
- The experimental results demonstrate that the proposed method can obtain a recognition accuracy of 98.75% in the −8 dB SNR and 89.25% in the −10 dB environment of 12 modulation formats.
2. Related Work
2.1. Conventional IPMR under Low SNR
2.2. Deep-Learning-Based IPMR in Low-SNR Conditions
2.3. Disentangled Learning
3. Signal Model and System Overview
3.1. Signal Model
3.2. System Overview
4. Method
4.1. Radar Signal Transform Module
4.2. DGDNet
4.2.1. Structure of The Network
4.2.2. Global Feature Extractor
4.2.3. Feature Disentangler
- Pure Radar Feature ExtractorThe pure radar feature extractor includes four Inception_A modules, one Reduction_A module, seven Inception_B modules, and one deconvolution module. The Inception module is used to extract the useful signal features hidden in the TFIs. The reduction layer is applied to reduce the image size. The output of the pure radar feature extractor is the PSR, which can be used to classify different modulation formats. The PSR can be used to reconstruct the denoised TFIs through the deconvolution module. This condition motivates us to design the radar signal reconstruction loss asthe reconstruction loss is the cosine distance between the ideal denoising image and pure image reconstructed by the deconvolution module. Unfortunately, ideal denoising pictures cannot be obtained in real scenes (confrontation scenes, blind reception scenes). Therefore, we directly use the TFIs transformed from the radar signal under the SNR of 16 dB as the ideal denoising images.
- Noise Feature ExtractorSimilar to the pure radar feature extractor, the noise signal extractor is based on the Inception structure. It contains one Inception_A module, one Reduction_A module, two Inception_B, and one Deconvolution module. The output of the noise feature extractor is the NSR, which can be used to reconstruct the noise images through the deconvolution module. Similar to the pure radar feature extraction process, the TFIs transformed from the radar signal under SNR of 16 dB can be used as the ideal denoising images. Therefore, the ideal noising images can be calculated as the difference between the input noisy TFIs and the ideal denoising images, as shown in Figure 2. A cosine distance loss is designed to calculate the gap between the noise image and the ideal noising image, which is defined aswhere is the input image, is the noise picture reconstructed by the noise signal extractor, and is the ideal pure image.
- SNMI LossTo improve the independence between the PSR and the NSR, we propose the SNMI loss to reduce the correlation between the pure radar feature extraction process and the noise feature extraction process. is defined aswhere and denote the PSR outputted by the pure radar feature extractor and the NSR exported by the noise signal extractor. indicates the joint probability distribution between and . and are the marginal distributions. Minimizing can promote the independence of and .
4.2.4. Modulation Mode Recognizer
5. Simulation Result and Analysis
5.1. Dataset Types
5.2. Construction of Datasets
5.3. Baseline Methods
5.4. Simulation Result and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zuo, L.; Wang, J.; Sui, J.; Li, N. An Inter-Subband Processing Algorithm for Complex Clutter Suppression in Passive Bistatic Radar. Remote Sens. 2021, 13, 4954. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, J.; Sun, W. Recognition of The Typical Distress in Concrete Pavement Based on GPR and 1D-CNN. Remote Sens. 2021, 13, 2375. [Google Scholar] [CrossRef]
- Zhu, M.; Li, Y.; Pan, Z.; Yang, J. Automatic Modulation Recognition of Compound Signals Using a Deep Multilabel Classifier: A Case Study with Radar Jamming Signals. Signal Process. 2020, 169, 107393. [Google Scholar] [CrossRef]
- Ravi Kishore, T.; Rao, K.D. Automatic Intrapulse Modulation Classification of Advanced LPI Radar Waveforms. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 901–914. [Google Scholar] [CrossRef]
- Sadeghi, M.; Larsson, E.G. Adversarial Attacks on Deep Learning-based Radio Signal Classification. IEEE Wirel. Commun. Lett. 2019, 8, 213–216. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Gui, G.; Ohtsuki, T.; Adachi, F. Multi-Task Learning for Generalized Automatic Modulation Classification under Non-Gaussian Noise with Varying SNR Conditions. IEEE Trans. Wirel. Commun. 2021, 20, 3587–3596. [Google Scholar] [CrossRef]
- Yu, Z.; Tang, J.; Wang, Z. GCPS: A CNN Performance Evaluation Criterion for Radar Signal Intrapulse Modulation Recognition. IEEE Commun. Lett. 2021, 25, 2290–2294. [Google Scholar] [CrossRef]
- Hassan, K.; Dayoub, I.; Hamouda, W.; Nzeza, C.N.; Berbineau, M. Blind Digital Modulation Identification for Spatially Correlated MIMO Systems. IEEE Trans. Wirel. Commun. 2012, 11, 683–693. [Google Scholar] [CrossRef]
- Wang, Y.; Gui, J.; Yin, Y.; Wang, J.; Sun, J.; Gui, G.; Adachi, F. Automatic Modulation Classification for MIMO Systems via Deep Learning and Zero-Forcing Equalization. IEEE Trans. Veh. Technol. 2020, 69, 5688–5692. [Google Scholar] [CrossRef]
- Ali, A.; Yangyu, F. Automatic Modulation Classification Using Deep Learning Based on Sparse Autoencoders with Nonnegativity Constraints. IEEE Signal Process. Lett. 2017, 24, 1626–1630. [Google Scholar] [CrossRef]
- Peng, S.; Jiang, H.; Wang, H.; Alwageed, H.; Zhou, Y.; Sebdani, M.M.; Yao, Y.D. Modulation Classification Based on Signal Constellation Diagrams and Deep Learning. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 718–727. [Google Scholar] [CrossRef] [PubMed]
- Tian, C.; Xu, Y.; Li, Z.; Zuo, W. Attention-guided CNN for Image Denoising. Neural Netw. 2020, 124, 117–129. [Google Scholar] [CrossRef] [PubMed]
- Qu, Z.; Hou, C.; Wang, W. Radar Signal Intra-Pulse Modulation Recognition Based on Convolutional Neural Network and Deep Q-Learning Network. IEEE Access 2020, 8, 49125–49136. [Google Scholar] [CrossRef]
- Qu, Z.; Wang, W.; Hou, C. Radar Signal Intra-Pulse Modulation Recognition Based on Convolutional Denoising Autoencoder and Deep Convolutional Neural Network. IEEE Access 2019, 7, 112339–112347. [Google Scholar] [CrossRef]
- Azzouz, E.E.; Nandi, A.K. Automatic Identification of Digital Modulation Types. Signal Process. 1995, 47, 55–69. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, Z.; Lu, W. Digital Modulation Classification Based on Higher-order Moments and Characteristic Function. In Proceedings of the 2020 IEEE 5th International Conference on Signal and Image Processing (ICSIP), Nanjing, China, 23–25 October 2020. [Google Scholar]
- Zaerin, M.; Seyfe, B. Multiuser Modulation Classification Based on Cumulants in Additive White Gaussian Noise Channel. IET Signal Process. 2012, 6, 815–823. [Google Scholar] [CrossRef]
- Lunden, J.; Terho, L.; Koivunen, V. Waveform Recognition in Pulse Compression Radar Systems. In Proceedings of the 2005 IEEE Workshop on Machine Learning for Signal Processing, Mystic, CT, USA, 28 September 2005. [Google Scholar]
- Warde, D.A.; Torres, S.M. The Autocorrelation Spectral Density for Doppler-Weather-Radar Signal Analysis. IEEE Trans. Geosci. Remote Sens. 2014, 52, 508–518. [Google Scholar] [CrossRef]
- Shi, Z.; Wu, H.; Shen, W.; Cheng, S.; Chen, Y. Feature Extraction for Complicated Radar PRI Modulation Modes Based on Auto-correlation Function. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016. [Google Scholar]
- Gulum, T.O.; Erdogan, A.Y.; Yildirim, T.; Pace, P.E. A Parameter Extraction Technique for FMCW Radar Signals Using Wigner-Hough-Radon Transform. In Proceedings of the 2012 IEEE National Radar Conference, Atlanta, GA, USA, 7–11 May 2012. [Google Scholar]
- Chen, Y.; Nijsure, Y.; Yuen, C.; Chew, Y.H.; Ding, Z.; Boussakta, S. Adaptive Distributed MIMO Radar Waveform Optimization Based on Mutual Information. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1374–1385. [Google Scholar] [CrossRef]
- Wu, A.; Han, Y.; Zhu, L.; Yang, Y. Instance-Invariant Domain Adaptive Object Detection via Progressive Disentanglement. IEEE Trans. Pattern Anal. Mach. Intell. 2021; in press. [Google Scholar]
- Qu, Z.; Mao, X.; Deng, Z. Radar Signal Intrapulse Modulation Recognition Based on Convolutional Neural Network. IEEE Access 2018, 6, 43874–43884. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, F.; Tang, B.; Yin, Q.; Sun, X. Slim and Efficient Neural Network Design for Resource-Constrained SAR Target Recognition. Remote Sens. 2018, 10, 1618. [Google Scholar] [CrossRef] [Green Version]
- Jan, M.; Pietrow, D. Artificial Neural Networks in The Filtration of Radiolocation Information. In Proceedings of the 2020 IEEE 15th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering (TCSET), Lviv-Slavske, Ukraine, 25–29 February 2020. [Google Scholar]
- Deng, W.; Zhao, L.; Liao, Q.; Guo, D.; Kuang, G.; Hu, D.; Liu, L. Informative Feature Disentanglement for Unsupervised Domain Adaptation. IEEE Trans. Multimed. 2021; in press. [Google Scholar]
- Han, M.; Özdenizci, O.; Wang, Y.; Koike-Akino, T.; Erdoğmuş, D. Disentangled Adversarial Autoencoder for Subject-Invariant Physiological Feature Extraction. IEEE Signal Process. Lett. 2020, 27, 1565–1569. [Google Scholar] [CrossRef] [PubMed]
- Cover, T.; Hart, P. Nearest neighbor pattern classification. IEEE Trans. Inf. Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector network. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Modulation type numbers | 12 |
| Number of sample points | 1024 |
| Sampling rate | 200 MHz |
| Number of training samples | 200 samples/type/SNR |
| ∈ [−10:2:8] (dB) | |
| Number of test samples | 100 samples/type/SNR |
| ∈ [−10:2:8] (dB) | |
| Training samples/test samples | 7/1 |
| Parameters of Gaussian white noise | |
| Bandwidth of different signals | 10 MHz: 80 MHz |
| Phase number of Frank | 4, 5, 6, 7 |
| Minimum frequency interval of FSK | 10 MHz |
| SNR | −10 | −8 | −6 | −4 | −2 | 0 | 2 | 4 | 6 | 8 |
|---|---|---|---|---|---|---|---|---|---|---|
| kNN | 0.3184 | 0.3397 | 0.4079 | 0.4336 | 0.4673 | 0.5612 | 0.5764 | 0.5803 | 0.6053 | 0.6374 |
| SVM | 0.4297 | 0.5654 | 0.6073 | 0.6963 | 0.7074 | 0.8352 | 0.8564 | 0.8655 | 0.8923 | 0.8991 |
| DGDNet | 0.8925 | 0.9875 | 0.9991 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| ADGOONet | 0.7804 | 0.9481 | 0.996 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| ADVGGNet | 0.7652 | 0.9392 | 0.996 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| ADRESNet | 0.7665 | 0.9387 | 0.9933 | 0.9996 | 0.9996 | 1 | 0.9996 | 0.9996 | 1 | 0.9996 |
| SNR | −10 | −8 | −6 | −4 | −2 | 0 | 2 | 4 | 6 | 8 |
|---|---|---|---|---|---|---|---|---|---|---|
| Inception_v4 | 0.8267 | 0.955 | 0.995 | 0.9992 | 1 | 0.9992 | 1 | 1 | 1 | 0.9992 |
| DGDNet(NSL) | 0.895 | 0.98 | 0.9983 | 0.9992 | 1 | 1 | 1 | 1 | 1 | 1 |
| DGDNet | 0.8925 | 0.9875 | 0.9991 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhang, J.; Luo, T.; Huang, T.; Tang, Z.; Chen, Y.; Li, J.; Luo, D. Radar Signal Intrapulse Modulation Recognition Based on a Denoising-Guided Disentangled Network. Remote Sens. 2022, 14, 1252. https://doi.org/10.3390/rs14051252
Zhang X, Zhang J, Luo T, Huang T, Tang Z, Chen Y, Li J, Luo D. Radar Signal Intrapulse Modulation Recognition Based on a Denoising-Guided Disentangled Network. Remote Sensing. 2022; 14(5):1252. https://doi.org/10.3390/rs14051252
Chicago/Turabian StyleZhang, Xiangli, Jiazhen Zhang, Tianze Luo, Tianye Huang, Zuping Tang, Ying Chen, Jinsheng Li, and Dapeng Luo. 2022. "Radar Signal Intrapulse Modulation Recognition Based on a Denoising-Guided Disentangled Network" Remote Sensing 14, no. 5: 1252. https://doi.org/10.3390/rs14051252
APA StyleZhang, X., Zhang, J., Luo, T., Huang, T., Tang, Z., Chen, Y., Li, J., & Luo, D. (2022). Radar Signal Intrapulse Modulation Recognition Based on a Denoising-Guided Disentangled Network. Remote Sensing, 14(5), 1252. https://doi.org/10.3390/rs14051252