
Blind Remote Sensing Image Deblurring Using Local Binary Pattern Prior

 , and
, and
Abstract
:1. Introduction
- (1)
- We note that LBP can completely extract the texture features of the images, which will not change significantly due to the presence of blur. Therefore, the LBP of the image can be used to locate the pixels that contain important texture information in the image by mapping.
- (2)
- A new remote sensing image deblurring algorithm based on LBP prior is proposed, which can remove the blur in the image and prevent over-sharpening by classifying all pixels and processing them in different ways.
- (3)
- As shown in the results, our proposed method, which has good stability and convergence, achieves extremely competitive results for remote sensing images.
2. Related Work
2.1. Edge Selection-Based Algorithms
2.2. Image Priors-Based Algorithms
2.3. Deep Learning-Based Deblurring Methods
3. Local Binary Pattern Prior Model and Optimization
3.1. The Local Binary Pattern
3.2. The Local Binary Pattern Prior
3.3. Estimating the Latent Image
| Algorithm 1: Solving auxiliary variables w. |
| Input: , , , , , . |
| , , and . |
| Maximum iterations M, initialize . |
| While |
| . |
| . |
| . |
| . |
| End while |
| . |
| Algorithm 2: Estimating the latent image. |
| Input: Blurry image G and blur kernel H. |
| Initialize , . |
| For 1 to 5 |
| Solve w using Algorithm 1. |
| Initialize . |
| For 1 to 4 |
| Solve d using Equation (23). |
| Initialize . |
| While |
| Solve z using Equation (18). |
| Solve U using Equation (26). |
| . |
| End while |
| . |
| End for |
| . |
| End for |
| Output: latent image U. |
3.4. Estimating the Blur Kernel
| Algorithm 3: Estimating the blur kernel. |
| Input: Blurry image G. |
| Initialize H with results from the coarser level. |
| While i do |
| Solve U using Algorithm 2. |
| Solve H using Equation (28). |
| End while |
| Output: Blur kernel H and intermediate latent image U. |
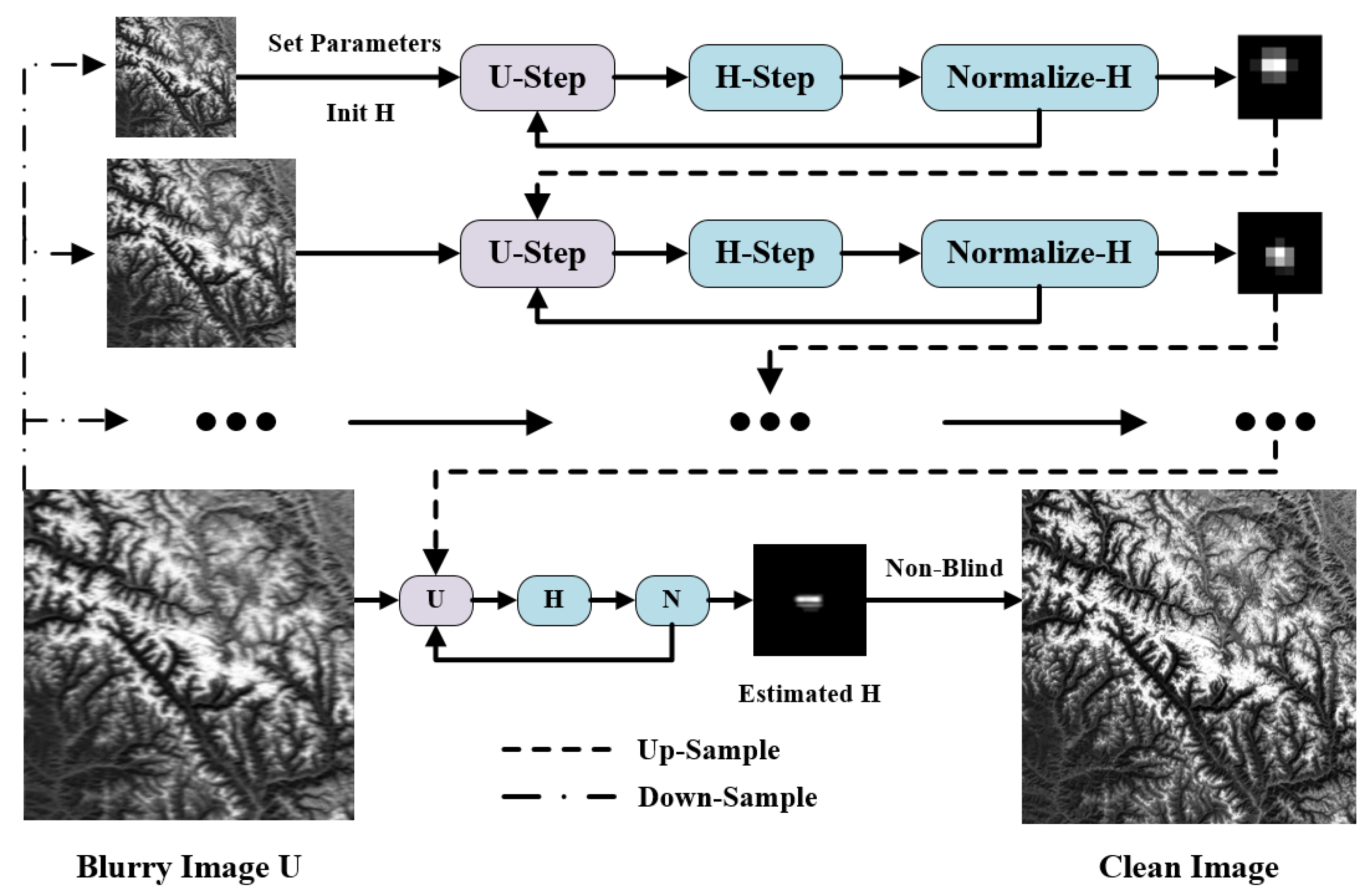
3.5. Algorithm Implementation
4. Experiment Results
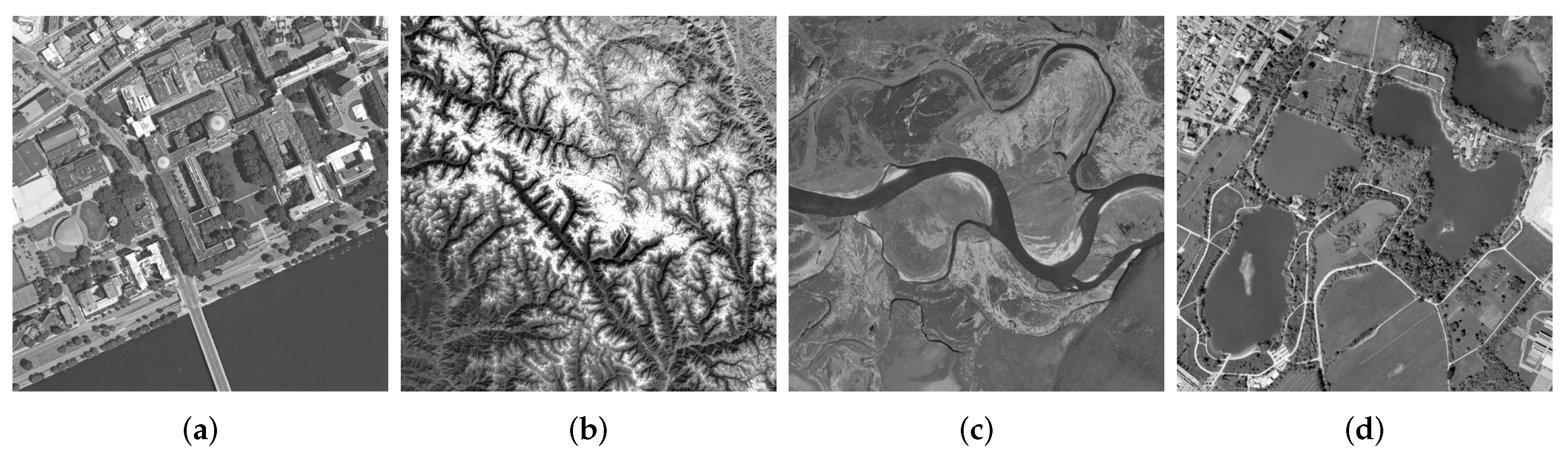
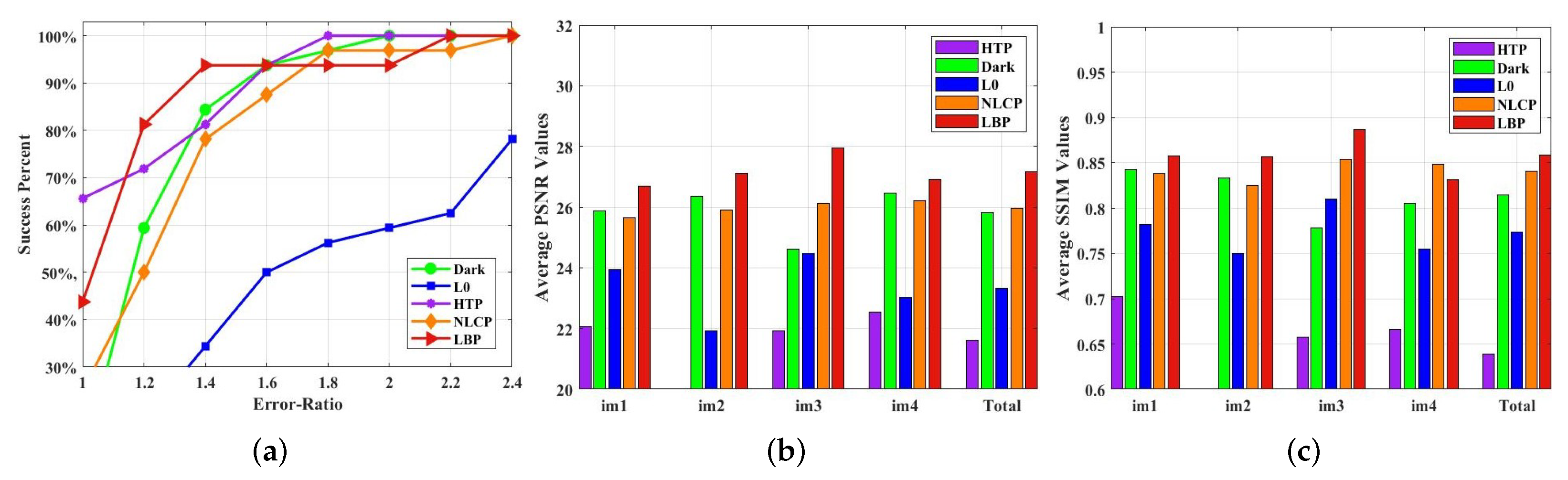
4.1. Simulate Remote Sensing Image Data
4.1.1. Motion Blur
4.1.2. Gaussian Blur
4.1.3. Defocus Blur
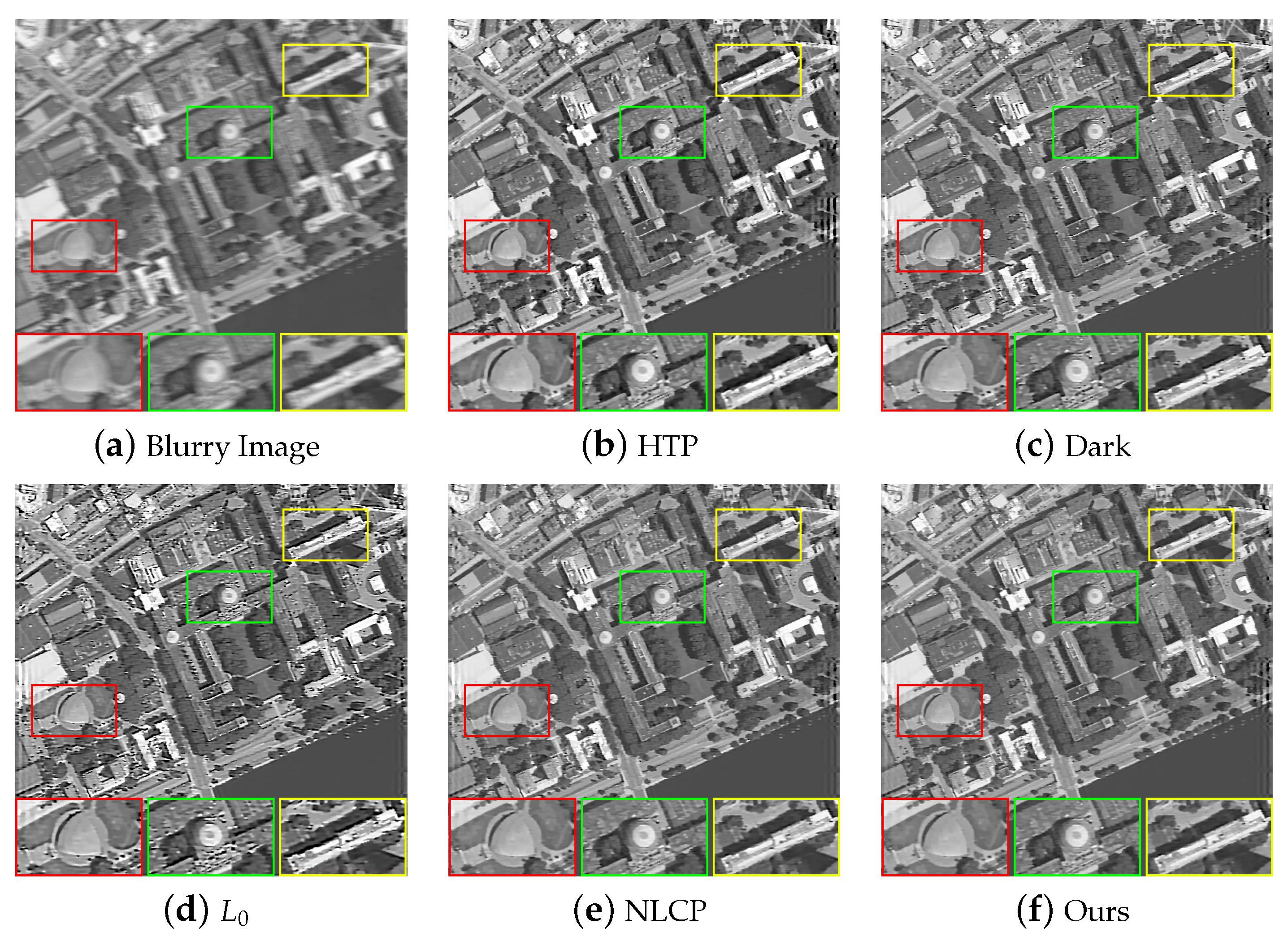
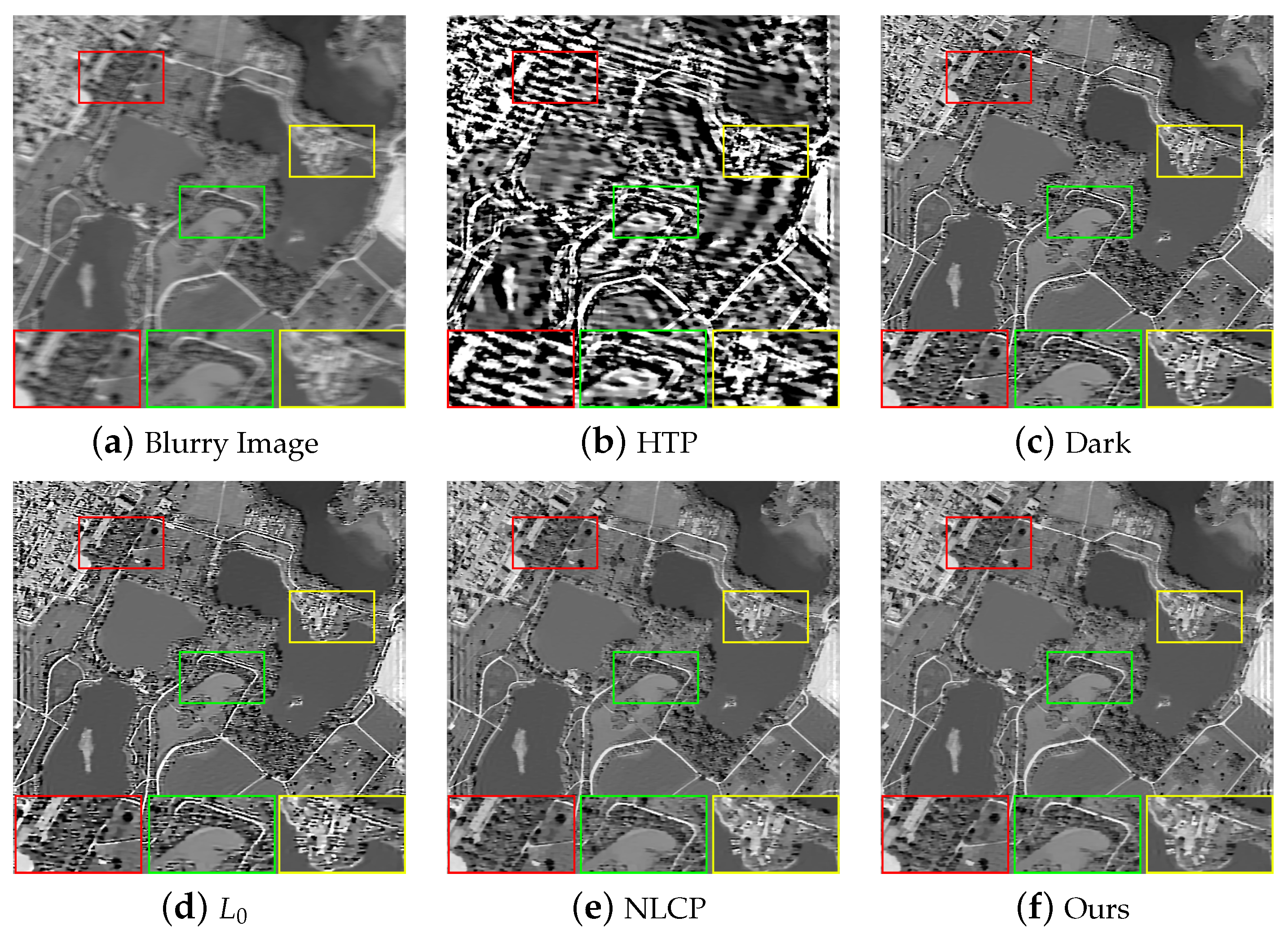
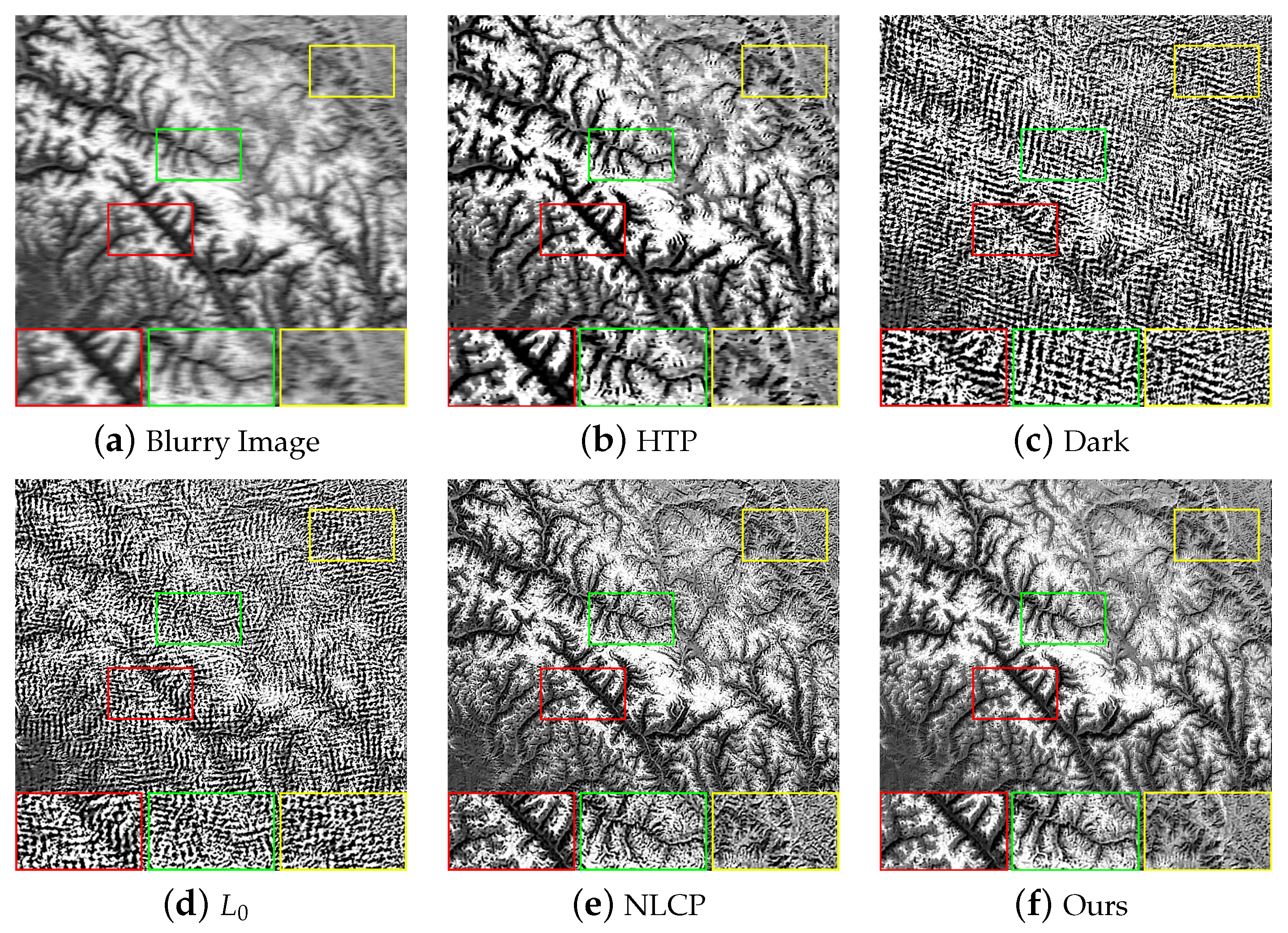
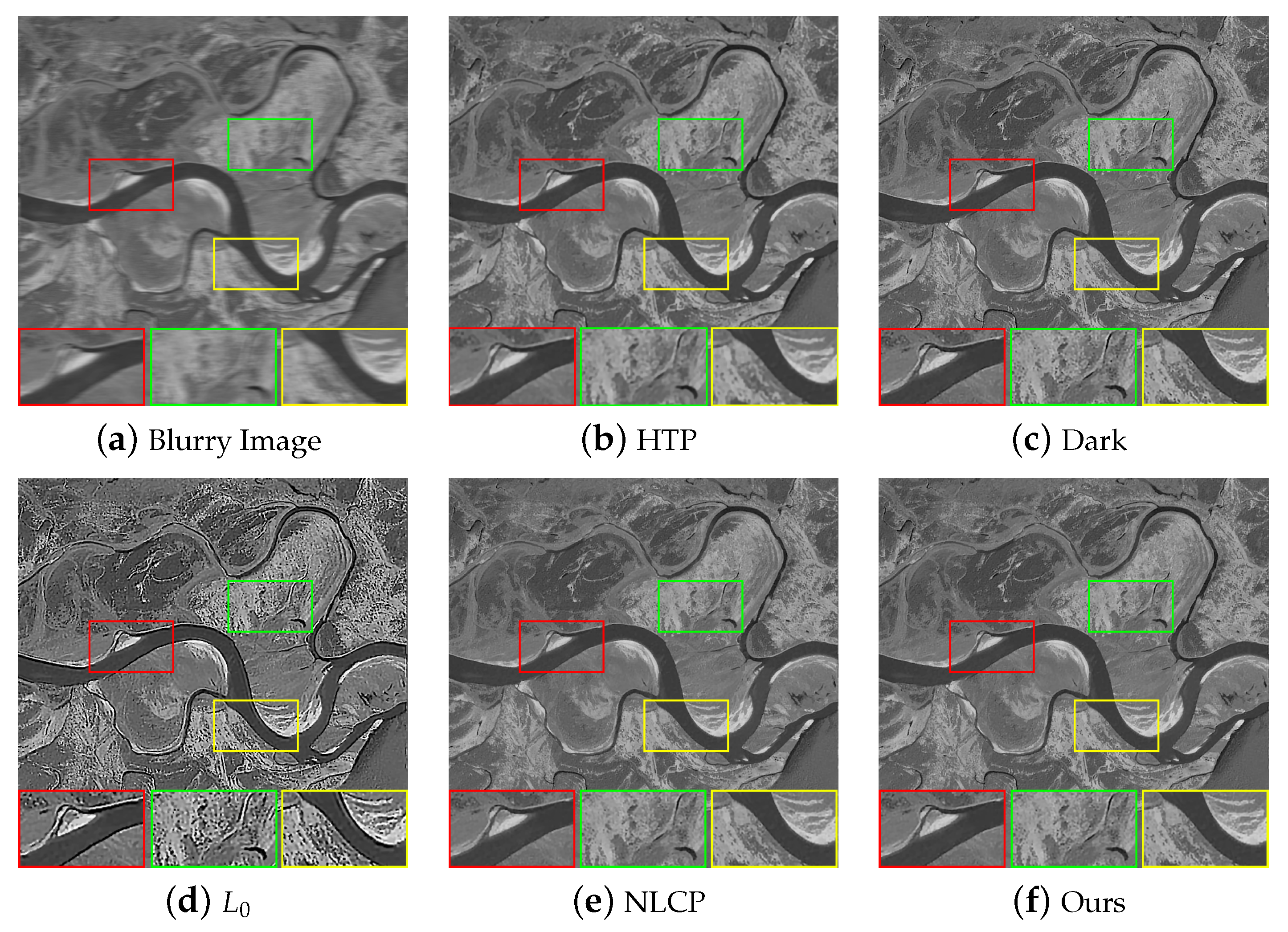
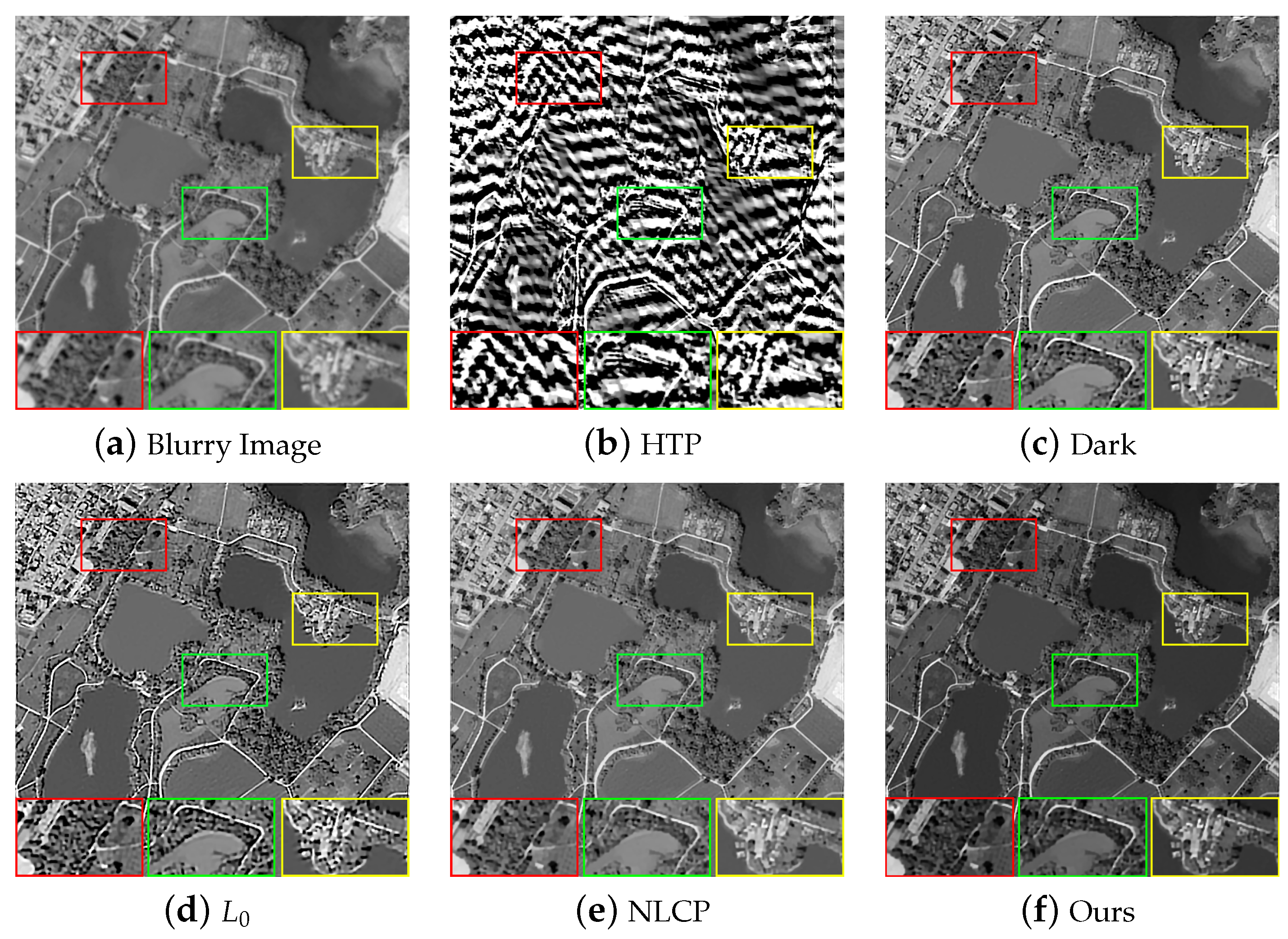
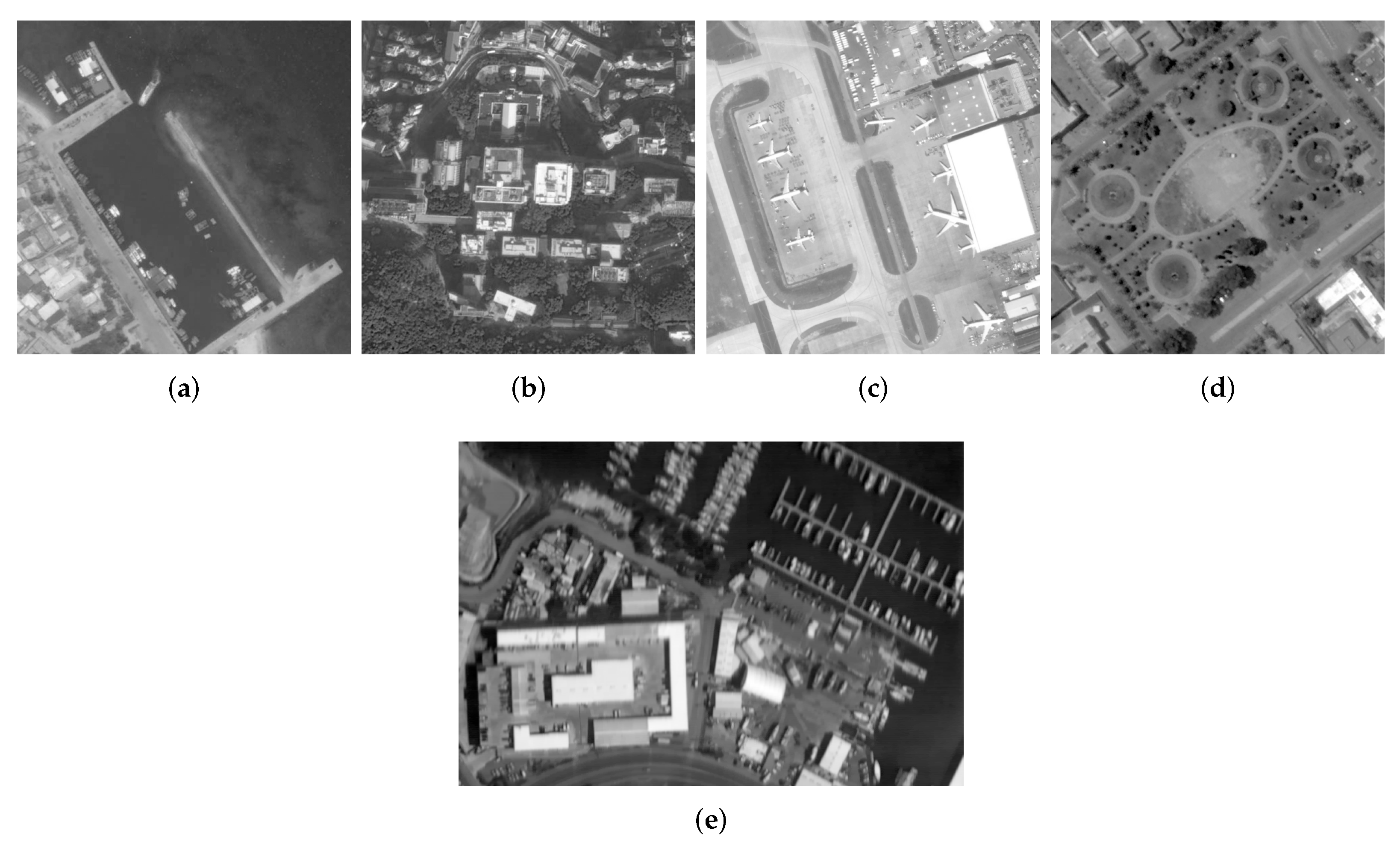
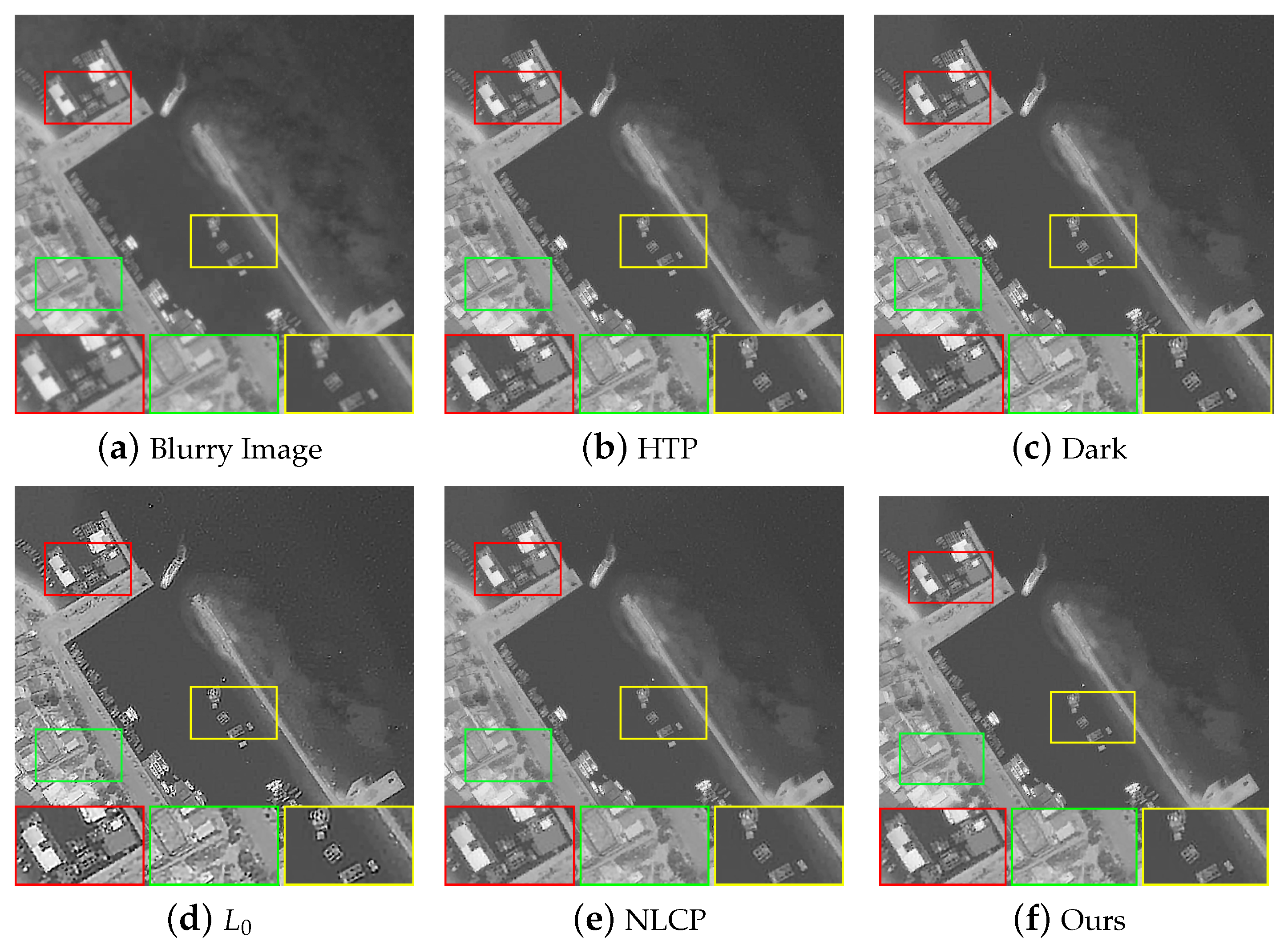
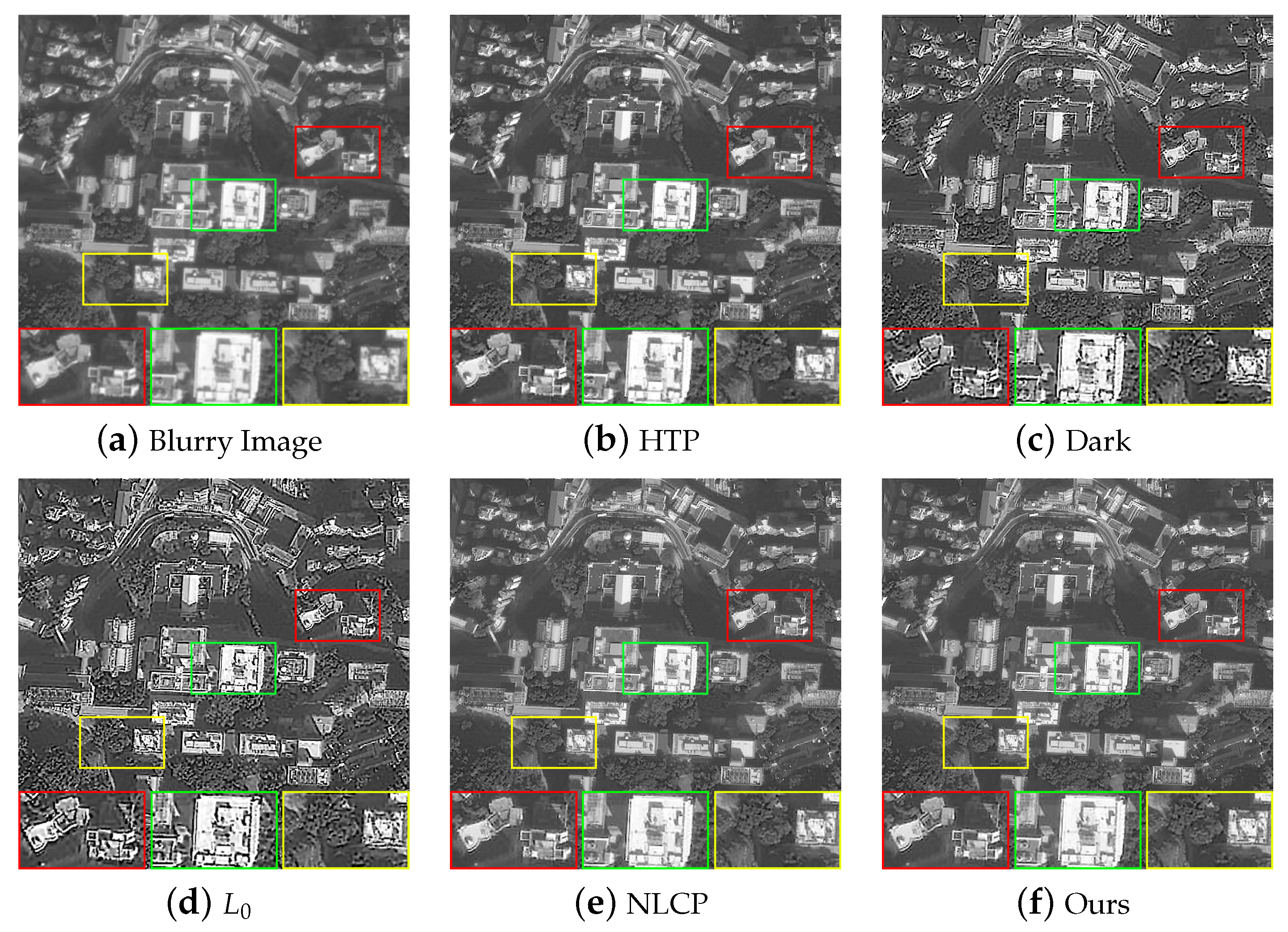
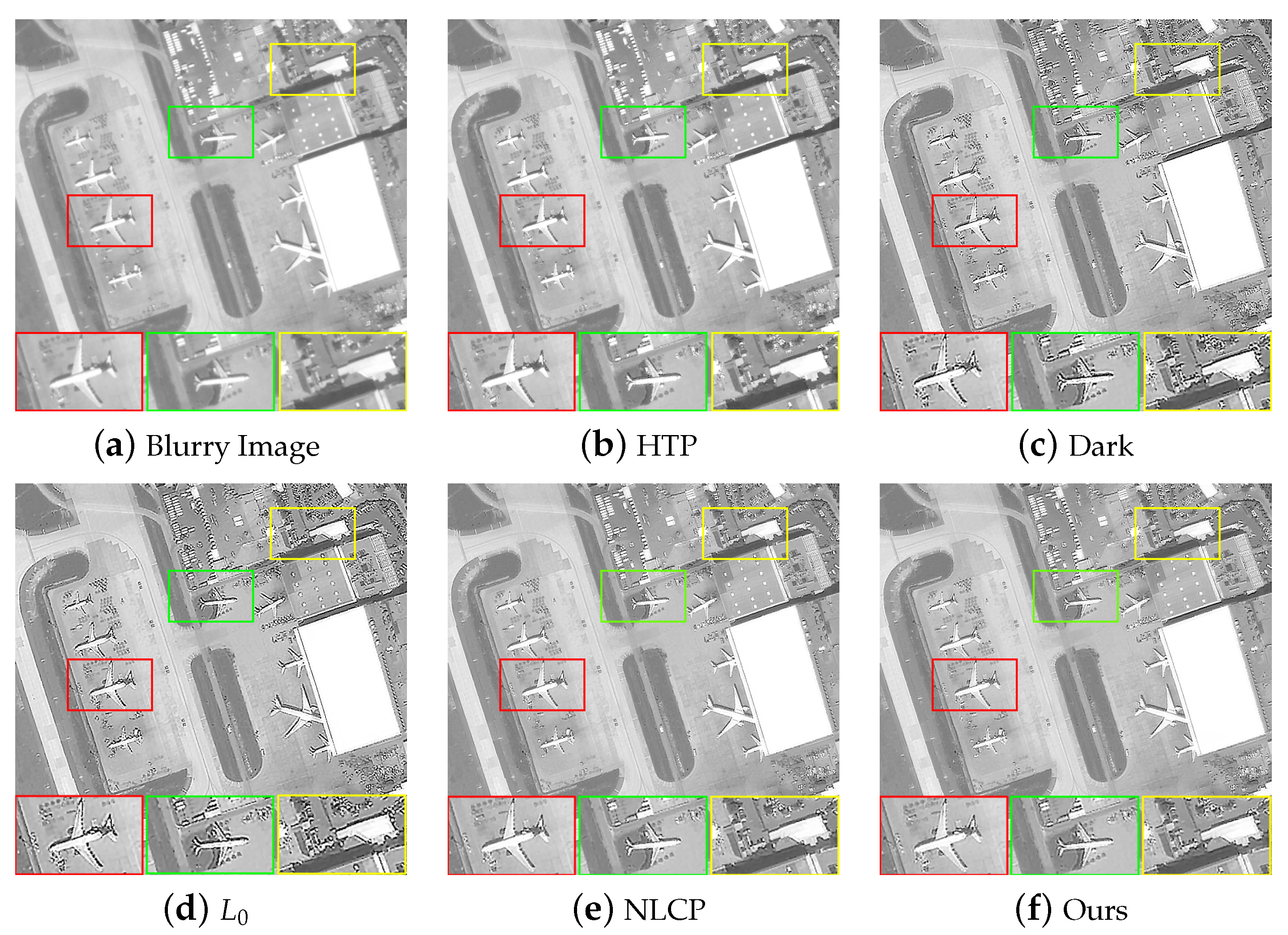
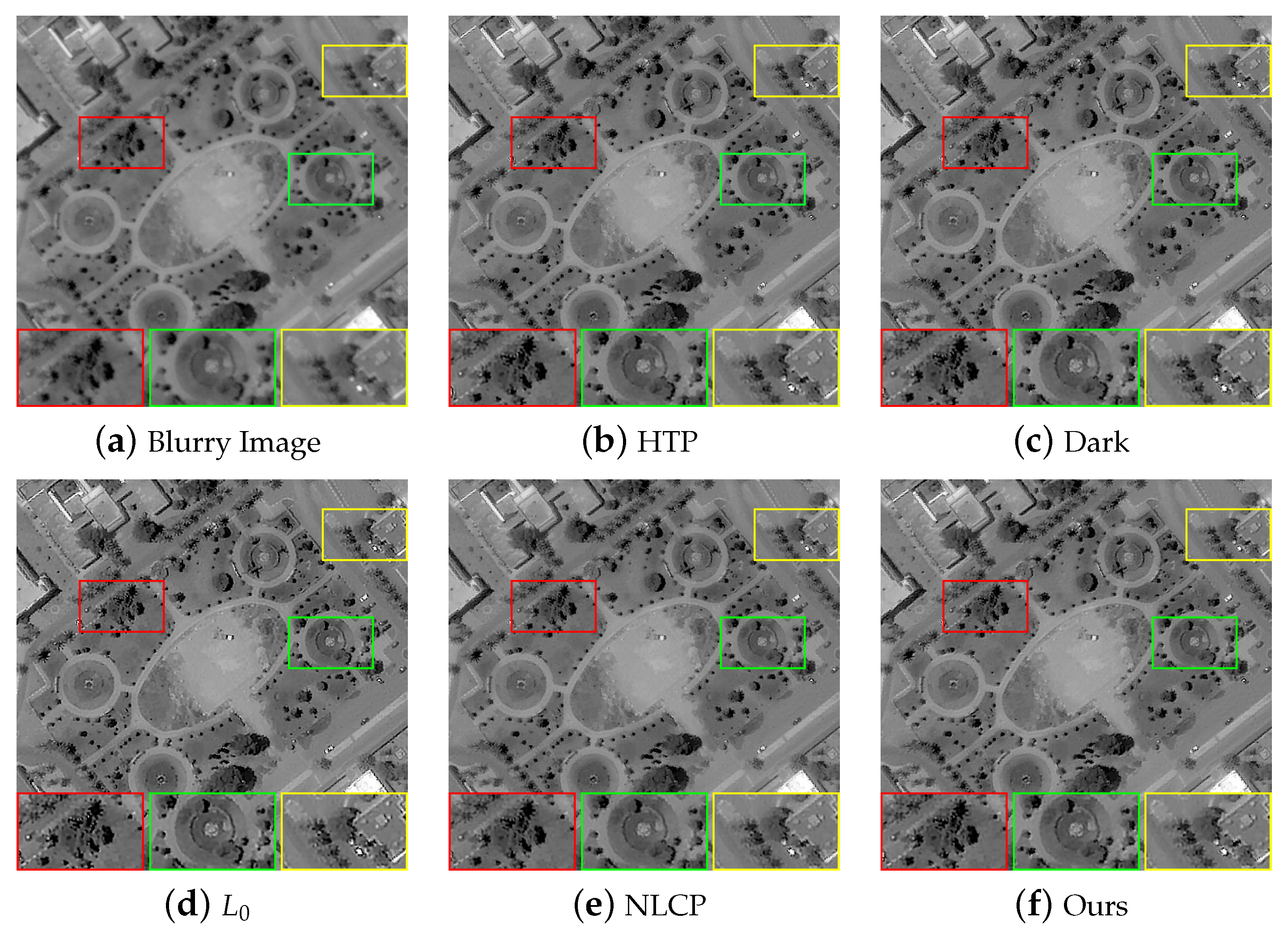
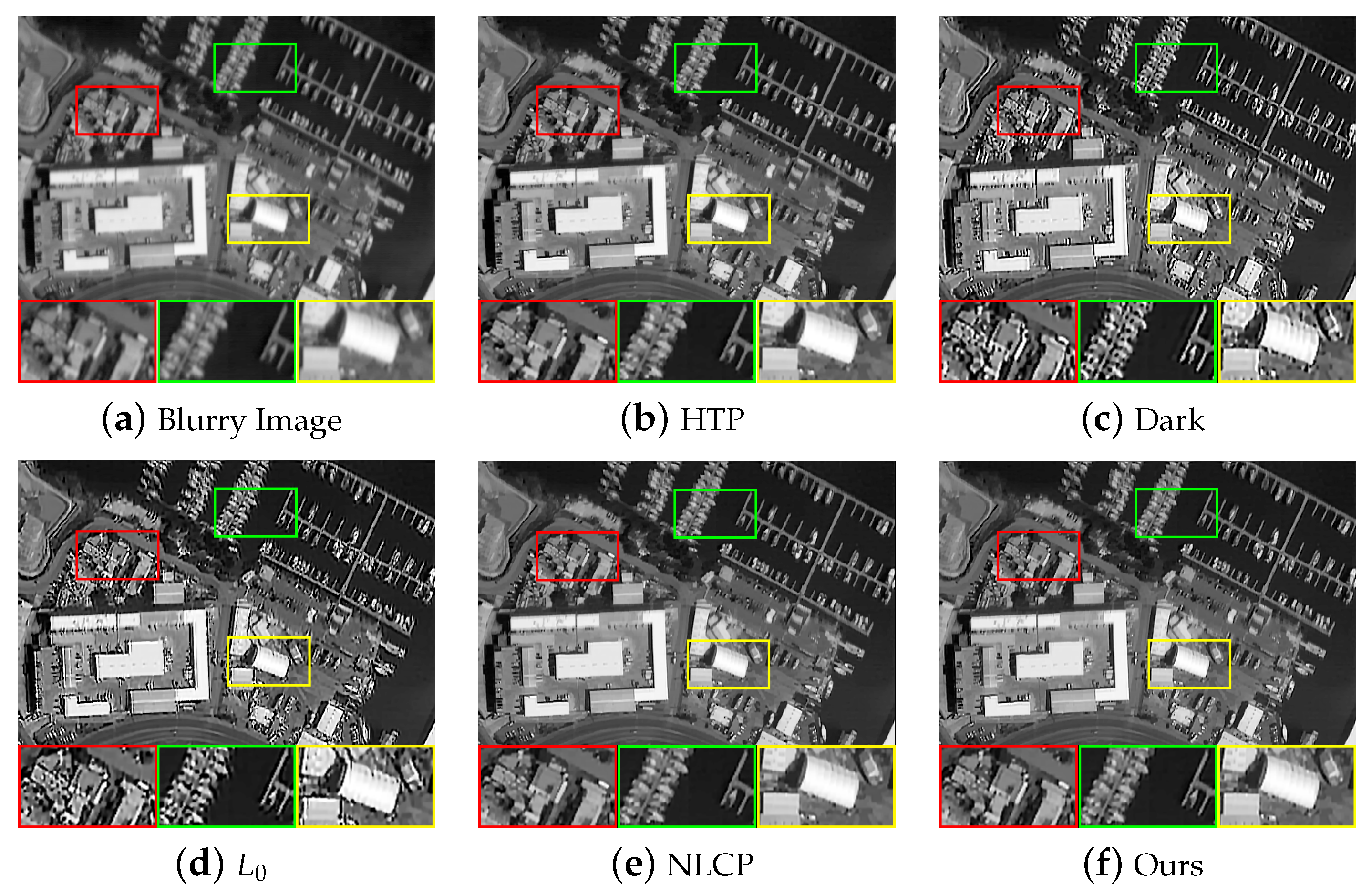
4.2. Real Remote Sensing Image Data
5. Analysis and Discussion
5.1. Effectiveness of the LBP Prior
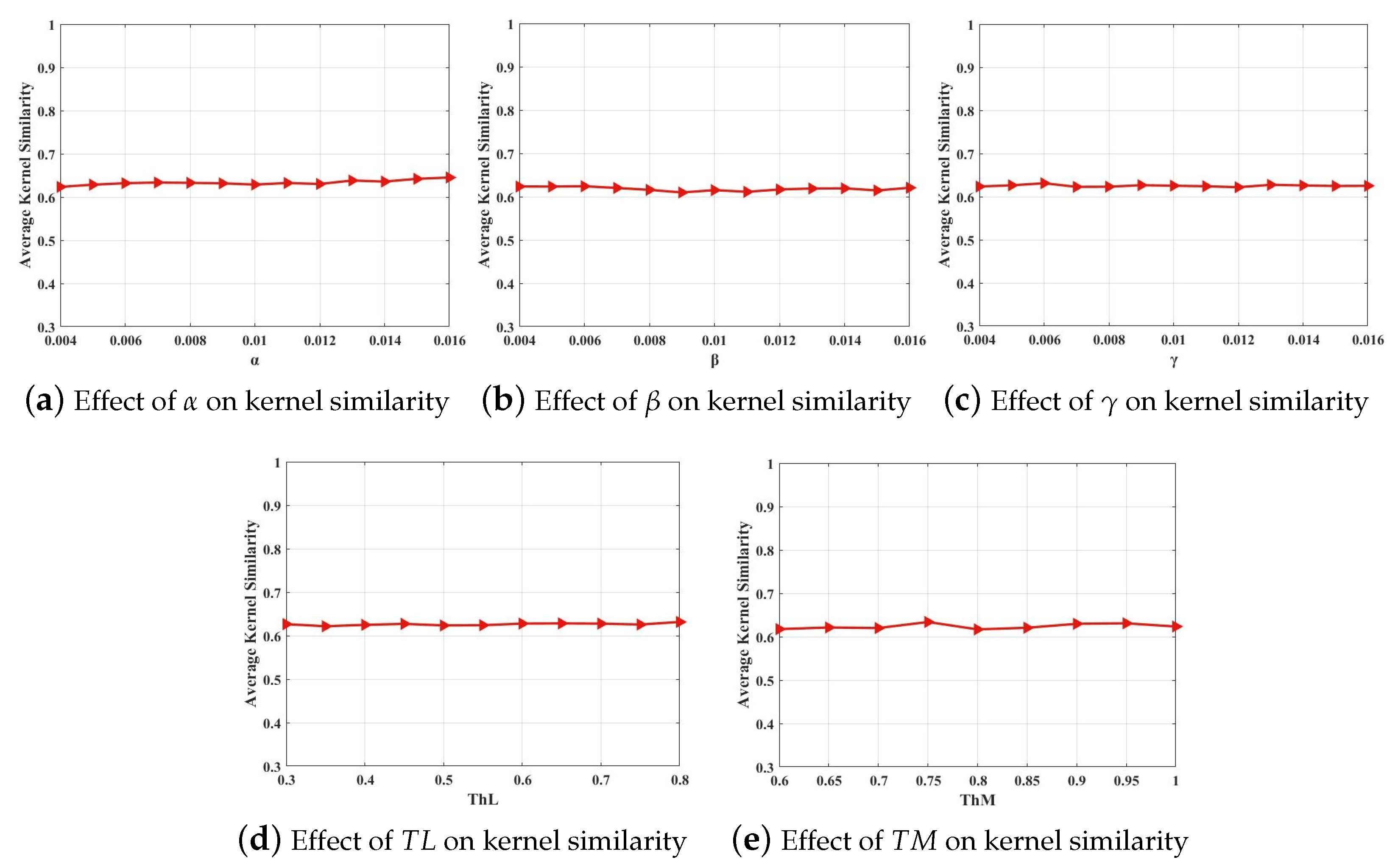
5.2. Effect of Hyper-Parameters
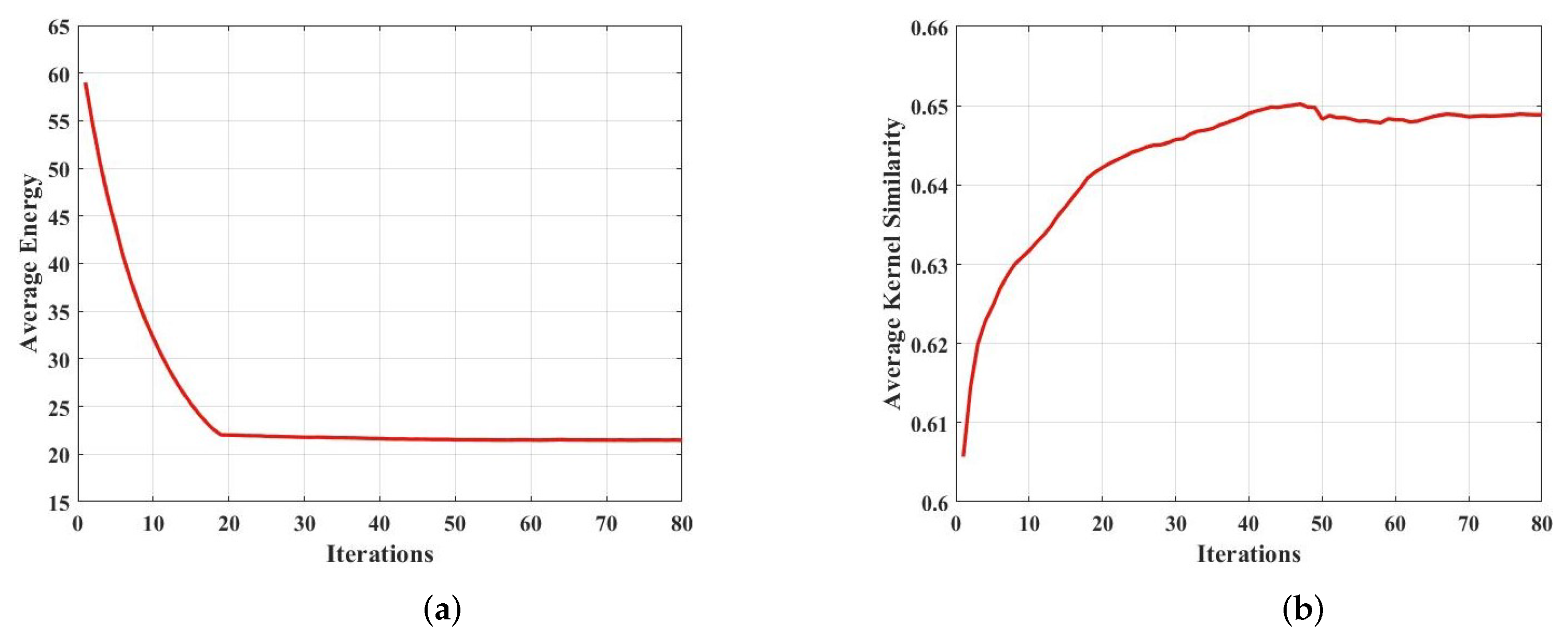
5.3. Convergence Analysis
5.4. Run-Time Comparisons
5.5. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| LBP | Local Binary Pattern |
| PAM | Projected Alternating Minimization |
| FISTA | Fast Iterative Shrinkage-Thresholding Algorithm |
| MAP | Maximum A Posteriori |
| VB | Variational Bayes |
| NLC | Non-Linear Channel |
| LMG | Local Maximum Gradient |
| CNN | Convolutional Neural Network |
| FPN | Feature Pyramid Network |
| PSNR | Peak-Signal-to-Noise Ratio |
| SSIM | Structural-Similarity |
| RMSE | Root Mean Squard Error |
| HTP | Heavy-Tailed prior |
| NLCP | Non-Linear Channel Prior |
| E | Entropy |
| AG | Average Gradient |
| P | Point sharpness |
References
- Rugna, J.D.; Konik, H. Automatic blur detection for metadata extraction in content-based retrival context. In Proceedings of the Internet Imaging V SPIE, San Jose, CA, USA, 18–22 January 2004; Volume 5304, pp. 285–294. [Google Scholar]
- Liu, R.T.; Li, Z.R.; Jia, J.Y. Image partial blur detection and classification. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear total variation based noise removal algorithms. Phys. D Nonlinear Phenom. 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Chan, T.F.; Wong, C.-K. Total variation blind deconvolution. IEEE Trans. Image Process. 1998, 7, 370–375. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liao, H.Y.; Ng, M.K. Blind deconvolution using generalized cross-validation approach to regularization parameter estimation. IEEE Trans. Image Process. 2011, 20, 670–680. [Google Scholar] [CrossRef] [PubMed]
- Perrone, D.; Favaro, P. Total variation blind deconvolution: The Devil Is in the Details. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2909–2916. [Google Scholar]
- Rameshan, R.M.; Chaudhuri, S.; Velmurugan, R. Joint MAP estimation for blind deconvolution: When does it work? In Proceedings of the Eighth Indian Conference on Computer Vision, Graphics and Image Processing December, Mumbai, India, 16–19 December 2012; pp. 1–7. [Google Scholar]
- Likas, A.C.; Galatsanos, N.P. A variational approach for Bayesian blind image deconvolution. IEEE Trans. Signal Process. 2004, 52, 2222–2233. [Google Scholar] [CrossRef]
- Fergus, R.; Singh, B.; Hertzmann, A.; Roweis, S.T.; Freeman, W.T. Removing camera shake from a single photograph. In Proceedings of the SIGGRAPH06: Special Interest Group on Computer Graphics and Interactive Techniques Conference, Boston, MA, USA, 30 July–3 August 2006; pp. 787–794. [Google Scholar]
- Levin, A.; Weiss, Y.; Durand, F.; Freeman, W.T. Efficient marginal likelihood optimization in blind deconvolution. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 2657–2664. [Google Scholar]
- Wipf, D.; Zhang, H.C. Analysis of Bayesian blind deconvolution. In Proceedings of the Energy Minimization Methods in Computer Vision and Pattern Recognition, Lund, Sweden, 19–21 August 2013; pp. 40–53. [Google Scholar]
- Perrone, D.; Diethelm, R.; Favaro, P. Blind deconvolution via lower bounded logarithmic image priors. In Proceedings of the 10th International Conference EMMCVPR 2015, Hong Kong, China, 13–16 January 2015; pp. 112–125. [Google Scholar]
- Levin, A.; Weiss, Y.; Durand, F.; Freeman, W.T. Understanding and evaluating blind deconvolution algorithms. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 1964–1971. [Google Scholar]
- Pan, J.S.; Sun, D.Q.; Pfister, H.; Yang, M.-H. Blind image deblurring using dark channel prior. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1628–1636. [Google Scholar]
- Yan, Y.Y.; Ren, W.Q.; Guo, Y.F.; Wang, R.; Cao, X.C. Image deblurring via extreme channels prior. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6978–6986. [Google Scholar]
- Ge, X.Y.; Tan, J.Q.; Zhang, L. Blind Image Deblurring Using a Non-Linear Channel Prior Based on Dark and Bright Channels. IEEE Trans. Image Process. 2021, 30, 6970–6984. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikäinen, M.; Harwood, D. A comparative study of texture measures with classification based on featured distributions. Pattern Recognit. 1996, 29, 51–59. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef] [Green Version]
- Joshi, N.; Szeliski, R.; Kriegman, D.J. PSF estimation using sharp edge prediction. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Cho, S.; Lee, S. Fast motion deblurring. ACM Trans. Graph. 2009, 28, 1–8. [Google Scholar] [CrossRef]
- Xu, L.; Jia, J.Y. Two-phase kernel estimation for robust motion deblurring. In Proceedings of the 11th European Conference on Computer Vision: Part I, Heraklion, Crete, Greece, 5–11 September 2010; pp. 157–170. [Google Scholar]
- Sun, L.B.; Cho, S.; Wang, J.; Hays, J. Edge-based blur kernel estimation using patch priors. In Proceedings of the IEEE International Conference on Computational Photography (ICCP), Cambridge, MA, USA, 19–21 April 2013; pp. 1–8. [Google Scholar]
- Ren, W.Q.; Cao, X.C.; Pan, J.S.; Guo, X.J.; Zuo, W.M.; Yang, M.-H. Image deblurring via enhanced low-rank prior. IEEE Trans. Image Process. 2016, 25, 3426–3437. [Google Scholar] [CrossRef]
- Pan, J.S.; Hu, Z.; Su, Z.X.; Yang, M.-H. L0-Regularized Intensity and Gradient Prior for Deblurring Text Images and Beyond. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 342–355. [Google Scholar] [CrossRef]
- Chen, L.; Fang, F.M.; Wang, T.T.; Zhang, G.X. Blind image deblurring with local maximum gradient prior. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 1742–1750. [Google Scholar]
- Yuzuriha, R.; Kurihara, R.; Matsuoka, R.; Okuda, M. TNNG: Total Nuclear Norms of Gradients for Hyperspectral Image Prior. Remote Sens. 2021, 13, 819. [Google Scholar] [CrossRef]
- Shan, Q.; Jia, J.; Agarwala, A. High-quality motion deblurring from a single image. ACM Trans. Graph. 2008, 27, 1–10. [Google Scholar]
- Krishnan, D.; Tay, T.; Fergus, R. Blind deconvolution using a normalized sparsity measure. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 233–240. [Google Scholar]
- Kotera, J.; Šroubek, F.; Milanfar, P. Blind Deconvolution Using Alternating Maximum a Posteriori Estimation with Heavy-Tailed Priors. In Proceedings of the 15th International Conference on Computer Analysis of Images and Patterns (CAIP), York, UK, 27–29 August 2013; pp. 59–66. [Google Scholar]
- Michaeli, T.; Irani, M. Blind deblurring using internal patch recurrence. In Proceedings of the 13th European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 783–798. [Google Scholar]
- Zhong, Q.X.; Wu, C.S.; Shu, Q.L.; Liu, W. Spatially adaptive total generalized variation-regularized image deblurring with impulse noise. J. Electron. Imaging 2018, 27, 1–21. [Google Scholar] [CrossRef]
- Yang, D.Y.; Wu, X.J. Dual-Channel Contrast Prior for Blind Image Deblurring. IEEE Access 2020, 8, 227879–227893. [Google Scholar] [CrossRef]
- Liu, J.; Tan, J.Q.; He, L.; Ge, X.Y.; Hu, D.D. Blind Image Deblurring via Local Maximum Difference Prior. IEEE Access 2020, 8, 219295–219307. [Google Scholar] [CrossRef]
- Zhou, L.Y.; Liu, Z.Y. Blind Deblurring Based on a Single Luminance Channel and L1-Norm. IEEE Access 2021, 9, 126717–126727. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, J.W.; Lin, S.G.; Fang, F.M.; Ren, J.S. Blind Deblurring for Saturated Images. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 6304–6312. [Google Scholar]
- He, W.; Zhang, H.; Zhang, L.; Shen, H. Total-variation-regularized low-rank matrix factorization for hyperspectral image restoration. IEEE Trans. Geosci. Remote Sens. 2016, 54, 178–188. [Google Scholar] [CrossRef]
- Zhang, H.; He, W.; Zhang, L.; Shen, H.; Yuan, Q. Hyperspectral image restoration using low-rank matrix recovery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4729–4743. [Google Scholar] [CrossRef]
- Sun, J.; Cao, W.F.; Xu, Z.B.; Ponce, J. Learning a convolutional neural network for non-uniform motion blur removal. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 769–777. [Google Scholar]
- Schuler, C.J.; Hirsch, M.; Harmeling, S.; Schölkopf, B. Learning to deblur. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1439–1451. [Google Scholar] [CrossRef]
- Li, L.; Pan, J.S.; Lai, W.-S.; Gao, C.X.; Sang, N.; Yang, M.-H. Blind image deblurring via deep discriminative priors. Int. J. Comput. Vis. 2019, 127, 1025–1043. [Google Scholar] [CrossRef]
- Nah, S.; Kim, T.H.; Lee, K.M. Deep multi-scale convolutional neural network for dynamic scene deblurring. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 257–265. [Google Scholar]
- Cai, J.R.; Zuo, W.M.; Zhang, L. Dark and bright channel prior embedded network for dynamic scene deblurring. IEEE Trans. Image Process. 2020, 29, 6885–6897. [Google Scholar] [CrossRef]
- Zhang, H.G.; Dai, Y.C.; Li, H.D.; Koniusz, P. Deep stacked hierarchical multi-patch network for image deblurring. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 5971–5979. [Google Scholar]
- Suin, M.; Purohit, K.; Rajagopalan, A.N. Spatially-attentive patchhierarchical network for adaptive motion deblurring. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 3603–3612. [Google Scholar]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.M.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar]
- Li, C.; Gao, W.Z.; Liu, F.H.; Chang, E.B.; Xuan, S.X.; Xu, D.Y. GAMSNet: Deblurring via Generative Adversarial and Multi-Scale Networks. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 3631–3636. [Google Scholar]
- Tian, H.; Sun, L.J.; Dong, X.L.; Lu, B.L.; Qin, H.; Zhang, L.P.; Li, W.J. A Modeling Method for Face Image Deblurring. In Proceedings of the 2021 International Conference on High Performance Big Data and Intelligent Systems (HPBD&IS), Macau, China, 5–7 December 2021; pp. 37–41. [Google Scholar]
- Maharjan, P.; Xu, N.; Xu, X.; Song, Y.Y.; Li, Z. DCTResNet: Transform Domain Image Deblocking for Motion Blur Images. In Proceedings of the 2021 International Conference on Visual Communications and Image Processing (VCIP), Munich, Germany, 5–8 December 2021; pp. 1–5. [Google Scholar]
- Chang, M.; Feng, H.J.; Xu, Z.H.; Li, Q. Low-Light Image Restoration with Short- and Long-Exposure Raw Pairs. IEEE Trans. Multimed. 2022, 24, 702–714. [Google Scholar] [CrossRef]
- Lai, W.S.; Huang, J.B.; Hu, Z.; Ahuja, N.; Yang, M.H. A Comparative Study for Single Image Blind Deblurring. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1701–1709. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 623–656. [Google Scholar] [CrossRef]
- Wang, H.N.; Zhong, W.; Wang, J.; Xia, D.S. Research of measurement for digital image definition. J. Image Graph. 2004, 9, 828–831. [Google Scholar]
- Hu, Z.; Yang, M.-H. Good regions to deblur. In Proceedings of the 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; pp. 59–72. [Google Scholar]
- Xu, L.; Lu, C.W.; Xu, Y.; Jia, J.Y. Image smoothing via L0 gradient minimization. ACM Trans. Graph. 2011, 30, 1–12. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Figure 4a | Figure 4b | ||||
|---|---|---|---|---|---|---|
| PSNR | SSIM | RMSE | PSNR | SSIM | RMSE | |
| HTP [29] | 22.9257 | 0.7882 | 15.5394 | 0.51 | ||
| Dark [14] | 24.9247 | 0.8343 | 8.7337 | 0.1263 | ||
| [24] | 17.389 | 0.6035 | 9.6171 | 0.2032 | ||
| NLCP [16] | 26.0395 | 0.8514 | 10.8196 | 0.3499 | ||
| Ours | 26.4378 | 0.8547 | 16.096 | 0.5591 | ||
| Method | Figure 4c | Figure 4d | ||||
| PSNR | SSIM | RMSE | PSNR | SSIM | RMSE | |
| HTP [29] | 29.8503 | 0.8088 | 4.3138 | 0.0565 | ||
| Dark [14] | 29.9602 | 0.8143 | 17.9493 | 0.6659 | ||
| [24] | 25.1494 | 0.7386 | 14.139 | 0.534 | ||
| NLCP [16] | 28.9047 | 0.7755 | 23.4888 | 0.8028 | ||
| Ours | 30.1424 | 0.8163 | 25.6768 | 0.8427 | ||
| Method | Figure 4a | Figure 4b | ||||
|---|---|---|---|---|---|---|
| PSNR | SSIM | RMSE | PSNR | SSIM | RMSE | |
| HTP [29] | 16.0017 | 0.5744 | 15.0446 | 0.5493 | ||
| Dark [14] | 12.0795 | 0.4805 | 1.2252 | 0.0336 | ||
| [24] | 10.3751 | 0.4253 | 1.1397 | 0.0072 | ||
| NLCP [16] | 21.32 | 0.8159 | 11.8677 | 0.4549 | ||
| Ours | 22.4017 | 0.8094 | 16.8765 | 0.6564 | ||
| Method | Figure 4c | Figure 4d | ||||
| PSNR | SSIM | RMSE | PSNR | SSIM | RMSE | |
| HTP [29] | 27.0649 | 0.7649 | -4.3236 | 0.0012 | ||
| Dark [14] | 24.927 | 0.6602 | 11.4001 | 0.4046 | ||
| [24] | 14.5766 | 0.2655 | 7.5502 | 0.3127 | ||
| NLCP [16] | 27.4396 | 0.7738 | 20.1692 | 0.7744 | ||
| Ours | 31.1574 | 0.9026 | 23.2932 | 0.8725 | ||
| Method | Figure 4a | Figure 4b | ||||
|---|---|---|---|---|---|---|
| PSNR | SSIM | RMSE | PSNR | SSIM | RMSE | |
| HTP [29] | 24.5929 | 0.8585 | 21.2477 | 0.7874 | ||
| Dark [14] | 25.7106 | 0.868 | 6.528 | 0.0915 | ||
| [24] | 20.6962 | 0.759 | 10.413 | 0.3589 | ||
| NLCP [16] | 27.2596 | 0.892 | 21.3035 | 0.7968 | ||
| Ours | 27.6087 | 0.8957 | 21.7349 | 0.8063 | ||
| Method | Figure 4c | Figure 4d | ||||
| PSNR | SSIM | RMSE | PSNR | SSIM | RMSE | |
| HTP [29] | 30.548 | 0.843 | 1.7656 | 0.0195 | ||
| Dark [14] | 31.7588 | 0.8616 | 21.7453 | 0.781 | ||
| [24] | 30.6986 | 0.8476 | 16.2103 | 0.6318 | ||
| NLCP [16] | 30.2685 | 0.8337 | 27.5728 | 0.8918 | ||
| Ours | 32.1723 | 0.8699 | 27.8422 | 0.8991 | ||
| Method | Figure 11a | Figure 11b | Figure 11c | Figure 11d | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| E | AG | P | E | AG | P | E | AG | P | E | AG | P | |
| HTP [29] | 6.4787 | 0.0153 | 0.1057 | 6.8137 | 0.041 | 0.285 | 7.1373 | 0.0357 | 0.2412 | 6.9637 | 0.0224 | 0.1553 |
| Dark [14] | 6.4757 | 0.0181 | 0.1263 | 6.9836 | 0.0968 | 0.6781 | 7.2132 | 0.0925 | 0.6286 | 6.9755 | 0.0267 | 0.1833 |
| [24] | 6.5899 | 0.0316 | 0.2196 | 6.9261 | 0.1269 | 0.8879 | 7.2365 | 0.1072 | 0.7283 | 6.9977 | 0.0328 | 0.2266 |
| NLCP [16] | 6.4623 | 0.0168 | 0.1156 | 6.8072 | 0.0459 | 0.3182 | 7.2153 | 0.0587 | 0.3963 | 6.9682 | 0.0249 | 0.1715 |
| Ours | 6.4846 | 0.0174 | 0.1198 | 6.8149 | 0.0472 | 0.3274 | 7.2242 | 0.0589 | 0.3989 | 6.9865 | 0.0267 | 0.1848 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Zheng, L.; Piao, Y.; Tao, S.; Xu, W.; Gao, T.; Wu, X. Blind Remote Sensing Image Deblurring Using Local Binary Pattern Prior. Remote Sens. 2022, 14, 1276. https://doi.org/10.3390/rs14051276
Zhang Z, Zheng L, Piao Y, Tao S, Xu W, Gao T, Wu X. Blind Remote Sensing Image Deblurring Using Local Binary Pattern Prior. Remote Sensing. 2022; 14(5):1276. https://doi.org/10.3390/rs14051276
Chicago/Turabian StyleZhang, Ziyu, Liangliang Zheng, Yongjie Piao, Shuping Tao, Wei Xu, Tan Gao, and Xiaobin Wu. 2022. "Blind Remote Sensing Image Deblurring Using Local Binary Pattern Prior" Remote Sensing 14, no. 5: 1276. https://doi.org/10.3390/rs14051276
APA StyleZhang, Z., Zheng, L., Piao, Y., Tao, S., Xu, W., Gao, T., & Wu, X. (2022). Blind Remote Sensing Image Deblurring Using Local Binary Pattern Prior. Remote Sensing, 14(5), 1276. https://doi.org/10.3390/rs14051276