1. Introduction
Precise point positioning (PPP) is a prevalent technology first proposed in 1997 [
1]. Its good stability and high accuracy have been widely used for various applications [
2,
3]. Although the performance of PPP has been greatly improved in recent years, the long convergence time of PPP still limits its application in time-critical fields. Multisystem integration increases the number of available satellites and is an effective way to improve PPP performance. The global positioning system (GPS), which is the first component of the global navigation satellite system (GNSS), has achieved great success in geodesy, geophysics, atmospheric sciences, navigation, positioning, and timing [
3]. In addition, error correction models for GPS are increasingly precise and accurate. Next, the global navigation satellite system of Russia (GLONASS) was revitalized in October 2011 and currently has 24 satellites in orbit. Since then, GNSS has included two satellite systems, GPS and GLONASS.
With the development of GPS and GLONASS, other global and regional satellite systems, such as the BeiDou navigation satellite system (BDS) and the Galileo positioning system of the EU (GALILEO), are gradually being constructed [
4,
5,
6,
7]. The development of BDS follows a three-step strategy: the installation of a demonstration system (BeiDou-1), a regional satellite system (BeiDou-2), and a global satellite system (BeiDou-3) [
8,
9]. BeiDou-2 consists of five geostationary-orbit (GEO) satellites, five inclined-geostationary-orbit (IGSO) satellites, and four medium-Earth-orbit (MEO) satellites. Since the end of 2012, the BeiDou-2 constellation has provided continuous positioning, navigation, and timing services for the entire Asia-Pacific region [
4,
9,
10,
11,
12]. The BeiDou-3 system was completed in July 2020 and began to provide services. The number of available BDS satellites is 49 for the basic navigation services, including 15 BDS-2, 4 experimental BDS-3S, and 30 BDS-3 satellites. For GALILEO, four in-orbit validation (IOV) satellites and four full operational capability (FOC) satellites were launched before September 2015 [
11,
12,
13]. The GALILEO constellation has had four IOV satellites and 14 FOC satellites since 17 November 2016, after several years of progress. Currently, there are 26 GALILEO satellites available worldwide, including 22 full operational capability (FOC) satellites and four in-orbit validation (IOV) satellites [
14,
15,
16,
17,
18]. Now, GALILEO and BDS are operational and continuously modernized, similar to GPS and GLONASS. With GPS, GLONASS, BDS, and GALILEO currently operating up to approximately 132 satellites, the combined use of these satellites will greatly enhance the PPP solution in terms of accuracy, reliability, and availability, especially in visibility-limited environments such as canyons and mountainous areas. In addition, the international GNSS service (IGS) has conducted a multi-GNSS experiment (MGEX) since 2012 to provide data, models, and analysis support for GNSS PPP [
6,
12]. Currently, more than ten analysis center agencies are providing precise products, which enables the use of GNSS observations for multi-GNSS PPP [
6,
12,
16,
18]. With more global and regional constellations under construction, PPP with combined observations is being rapidly developed. Compared with the single satellite navigation system, combined PPP has dramatically improved in terms of shortening the convergence time, increasing the stability of the solution, and improving the positioning accuracy [
18,
19,
20].
Unlike GPS, BDS, and GALILEO, which use code division multiple access (CDMA) technology to transmit signals, GLONASS uses frequency division multiple access (FDMA) technology to transmit signals at 14 frequencies (the frequency channels are from −7 to 6). In this vein, GLONASS code and carrier phase observations suffer from inter-frequency bias (IFB) [
20,
21]. The IFB associated with the code is called the inter-frequency code bias (IFCB), and the IFB associated with the carrier phase is called inter-frequency phase bias (IFPB) [
21,
22]. Generally, the IFPB can be observed in receivers of the same manufacturer, while IFPB rate differences between receivers of different manufacturers can be up to 5 cm at adjacent frequencies. Many studies [
20,
23,
24,
25] indicate that the IFPB can be estimated well by a linear function of the frequency channels, so it is not described in this article. It has been proven that the effect of IFCB could be as high as several meters in the study [
26]. Many studies also have shown that IFCB correlates with receiver type, antenna, dome, and firmware version and remains relatively stable [
27,
28,
29,
30]. For the IFCB, the error is usually ignored or estimated as a linear function of the frequency channel [
11,
13]. If the IFCB is ignored, then the GLONASS pseudorange observations are usually assigned a small weight to reduce the effect of IFCB. This significantly reduces the contribution of pseudorange observations to the PPP solution, especially during the initialization phase, which can affect the positioning accuracy and convergence speed. In a previous study [
30], it was demonstrated that some receivers satisfy a linear function of the frequency channel to estimate the IFCB, while some satisfy a quadratic function of the frequency channel to estimate the IFCB. Furthermore, most of these studies are built on combined observations. These combined observations have both advantages and disadvantages. The advantage is that the wavelength is generally longer and can be used to fix the ambiguity (such as wide-lane (WL) observations) and reduce the estimation of ionospheric parameters (such as ionosphere-free (IF) observations). The disadvantages are that the noise is too large, and it is impossible to estimate the abundant additional parameters for the physics and meteorology studies. In another study [
31], four different existing IFCB methods were summarized, which estimated the IFCB for each GLONASS satellite (EG model), estimated the IFCB as a quadratic function of the frequency channel (QF model), modelled the IFCB as a linear function of the frequency channel (LF model), or neglected the IFCB (NF model), proposing that it was best to estimate the IFCB using the EG model. Nevertheless, their experiment only analyzed the performance of GLONASS-only and GPS/GLONASS, and the other combinations were not analyzed. We know that the numbers of parameters corresponding to each IFCB model are very different, and the number of satellites observed per epoch in each combined system also varies greatly. Thus, the performance of different combinations will vary greatly for different IFCB models during the numerical calculation, and one IFCB model should not be considered the best just because it performs best in one or two combination(s). Furthermore, the convergence accuracy they set was a very low threshold (0.1 m or 0.2 m) [
31], which makes it difficult to meet the needs of various industries. The convergence threshold should be a period of values that can meet the needs of different applications, and it should be more intuitive to analyze the convergence time of each IFCB model considering the requirements of different accuracy thresholds. Lastly, only the accuracy and convergence time were analyzed in the study [
31], and a very important aspect they are missing is the data utilization. Since the extended Kalman filter was used, one solution should be output per epoch, but the experimental results show that not every IFCB model will output a solution at every epoch. When the number of satellites is small, if the adopted IFCB model introduces too many unknowns, then it will prolong the convergence time of the solution or even lead to no output solutions for some epochs. This is very important for users who are not using long-term observations. What we want is a model that works for all combinations, not just for one or two combination(s). Perhaps the best model performs slightly worse in some combinations than others, but is optimal when considered as a whole, similar to the least squares (LS) method.
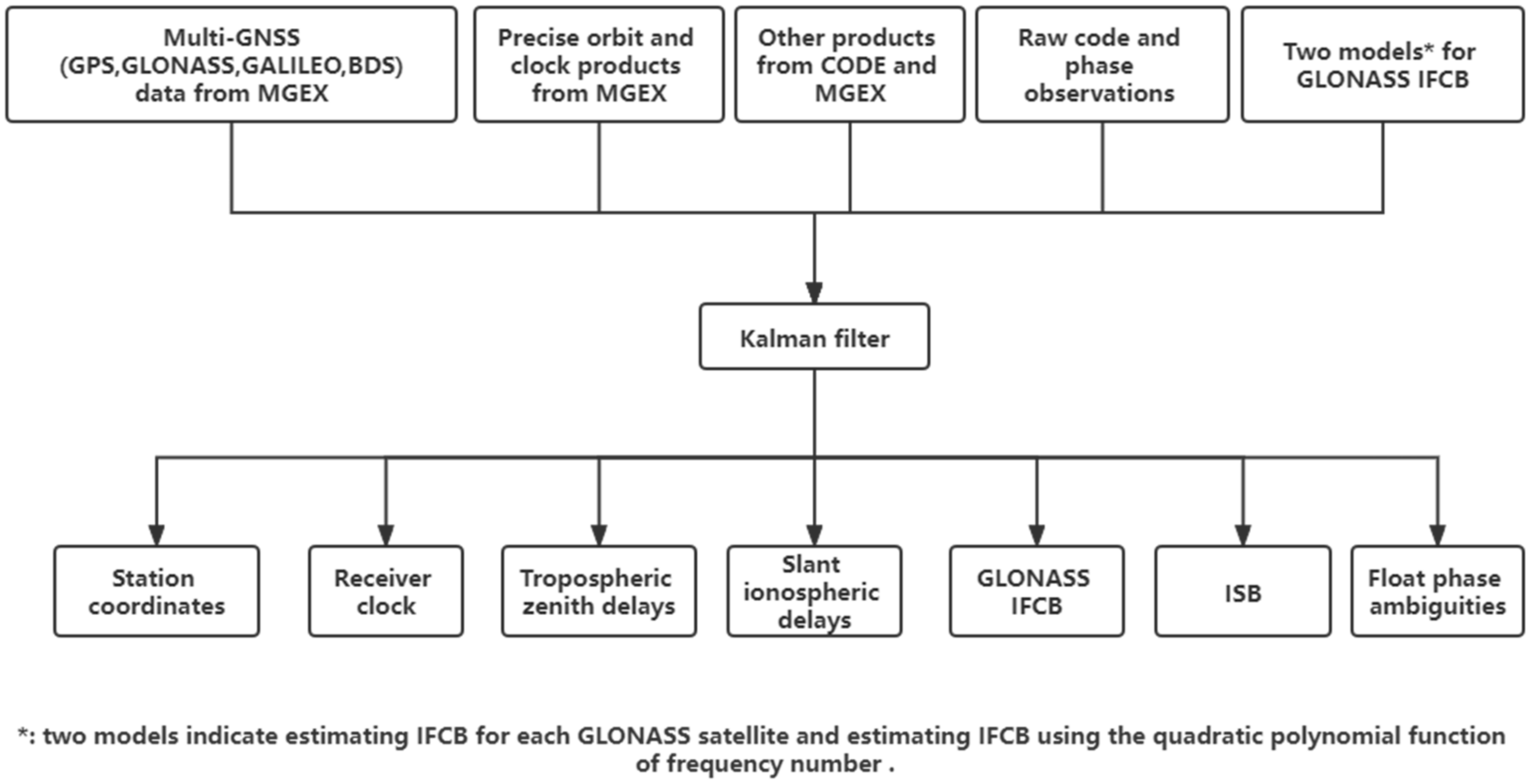
With this background, this study contributes a more comprehensive analysis that mainly focuses on the GLONASS IFCB models. First, we derive general PPP observation equations using undifferenced and uncombined observations. To obtain the full rank function model, we re-parameterize some unknown parameters. For the NF model, the GLONASS positioning model is essentially identical to the positioning models of GPS, BDS, or GALILEO. However, the IFCB is not fully absorbed by the receiver clock offset and ionospheric delay parameters. The remaining frequency-dependent IFCB is reflected in the pseudorange residuals, which causes many observations to be discarded as gross errors due to the large residuals. Consequently, the NF model that ignores the effects of IFCB is the worst. In addition to the NF model, there are only three commonly used IFCB models: the EG model, the QF model, and the LF model. Second, two relatively better models are identified from the remaining three models, and then, the two remaining IFCB models are introduced in detail. Third, detailed statistical analyses of the positioning accuracy, convergence speed, and data utilization are performed for the two remaining better IFCB models. Finally, the conclusions are provided.
5. Conclusions
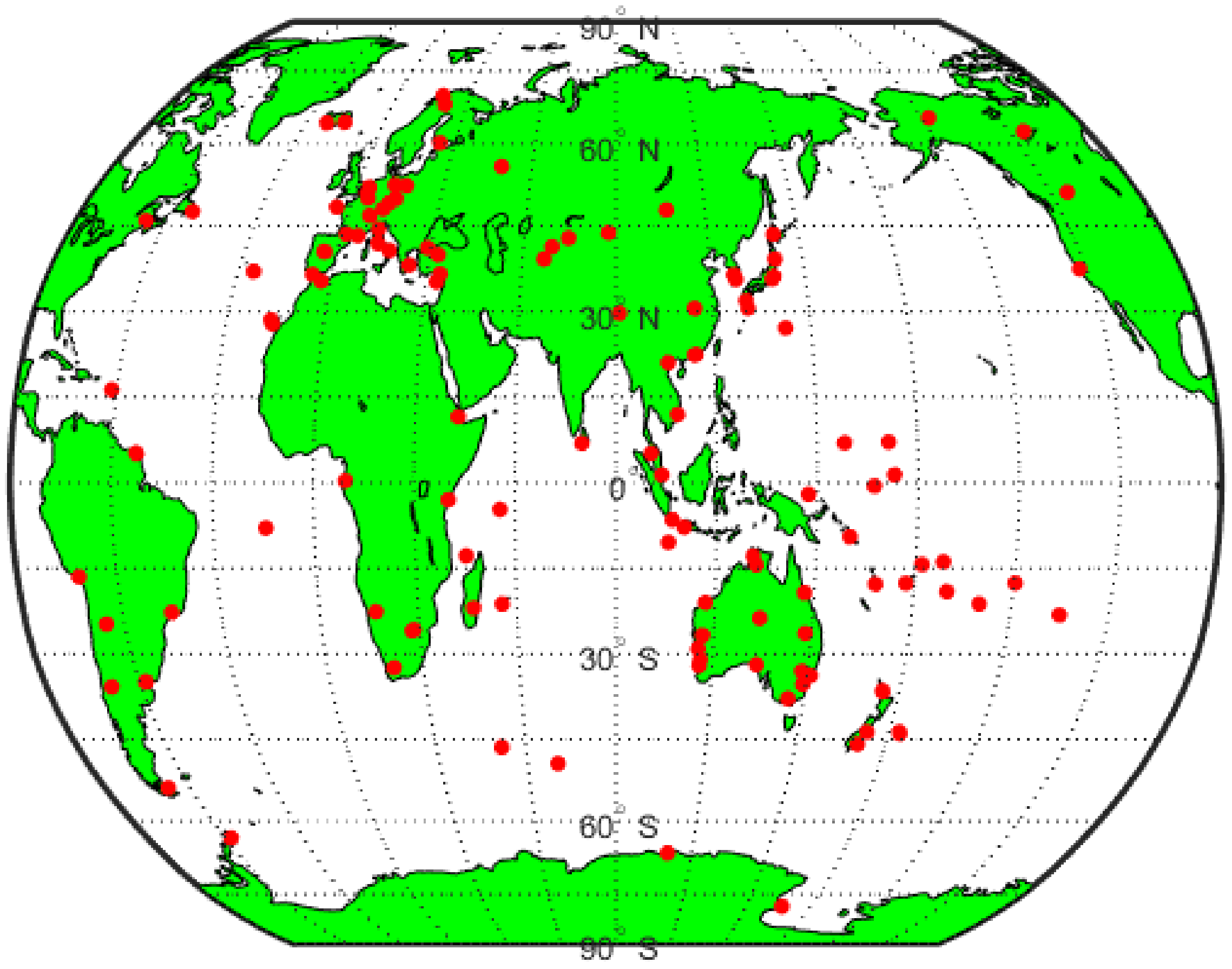
This paper provides a much more detailed analysis of the two IFCB models for combined PPP. We first propose a universal PPP model that uses raw pseudorange and carrier phase observations instead of other combined observations to amplify noise errors. In this model, two better IFCB handling schemes, the EG and QF schemes, from the four commonly used schemes are comprehensively compared and analyzed. To obtain the full-rank function model, we recombine the unknown parameters. The data from 140 IGS stations obtained between 1–7 September 2021 are used to validate the feasibility of these proposed IFCB models, and the results are presented.
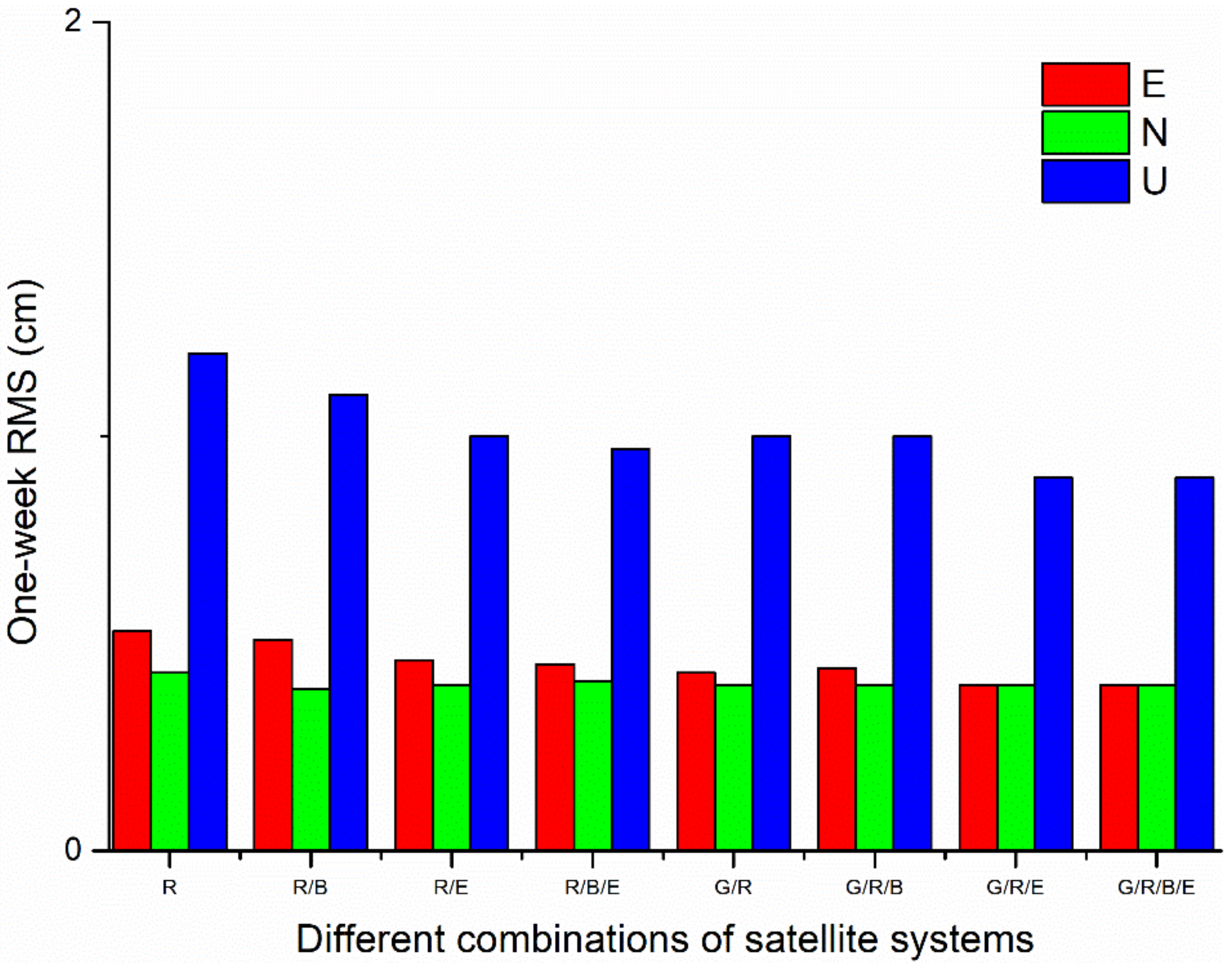
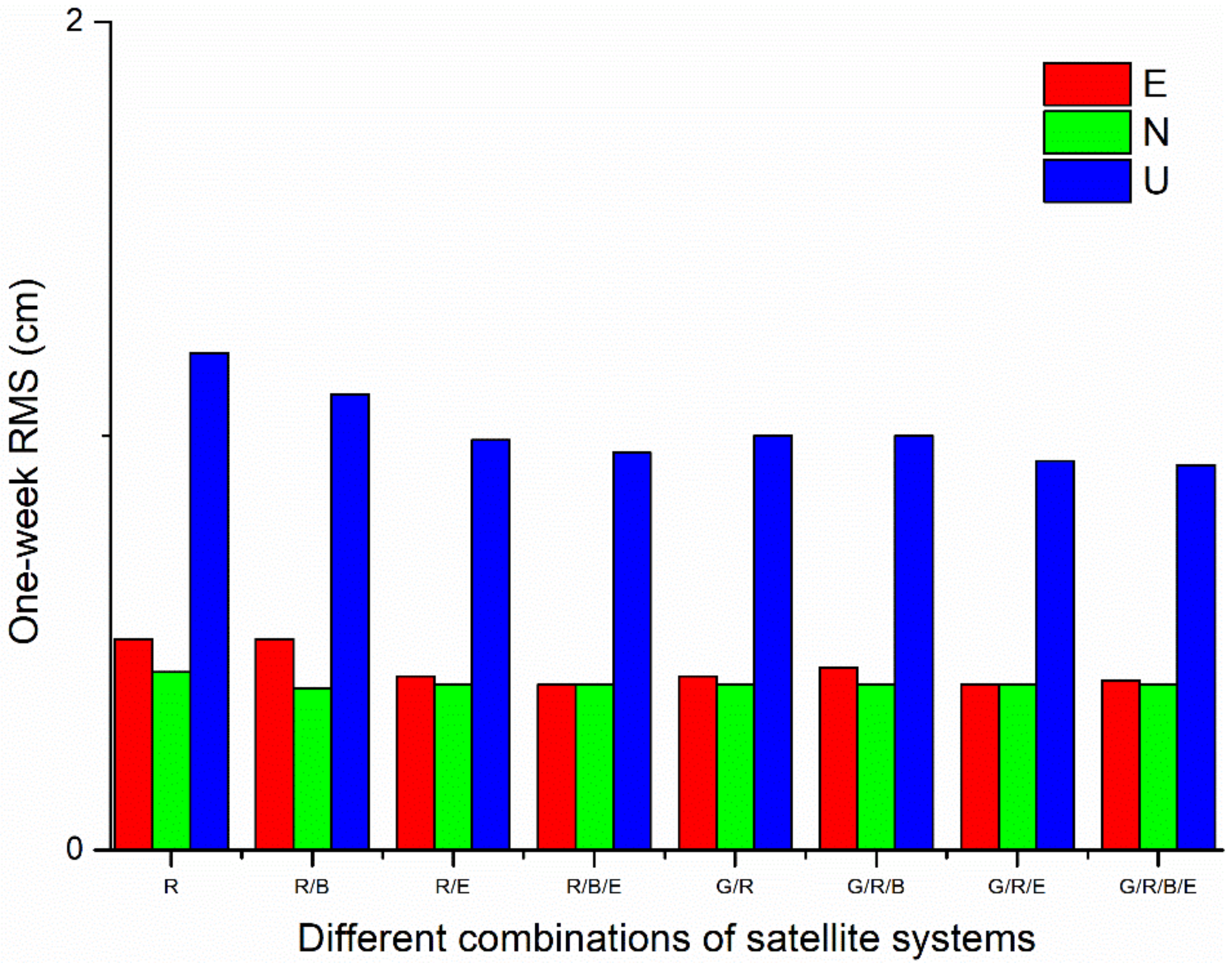
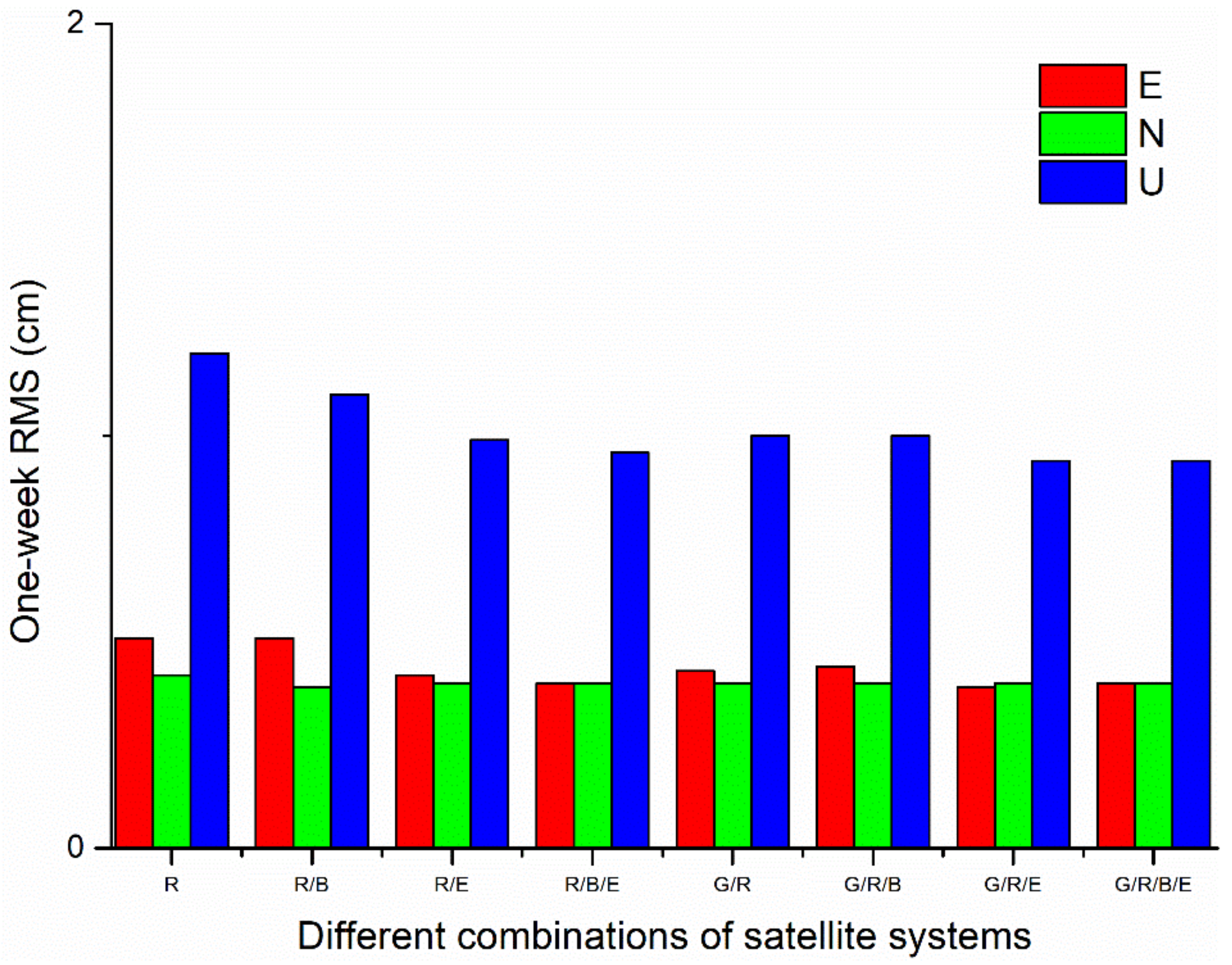
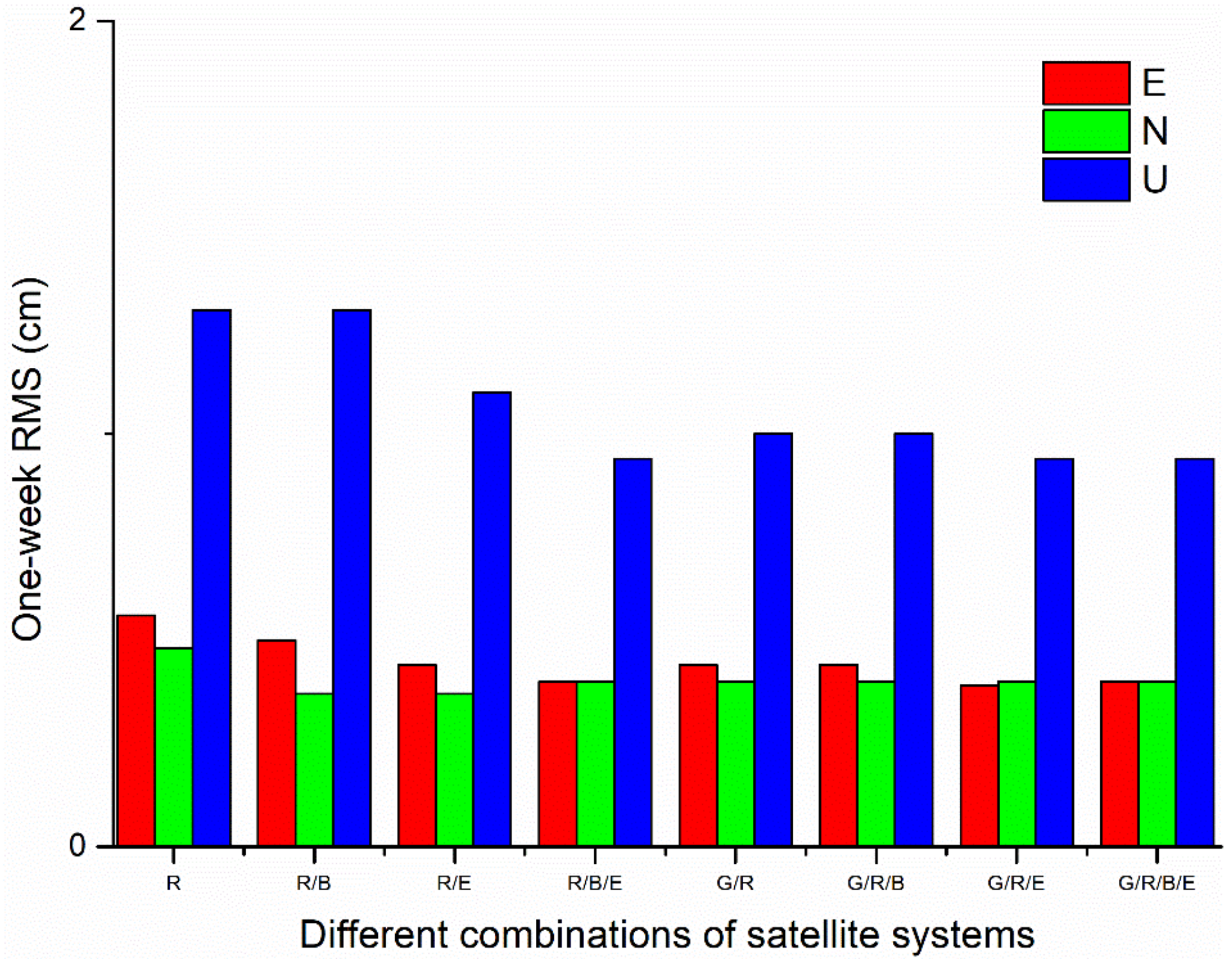
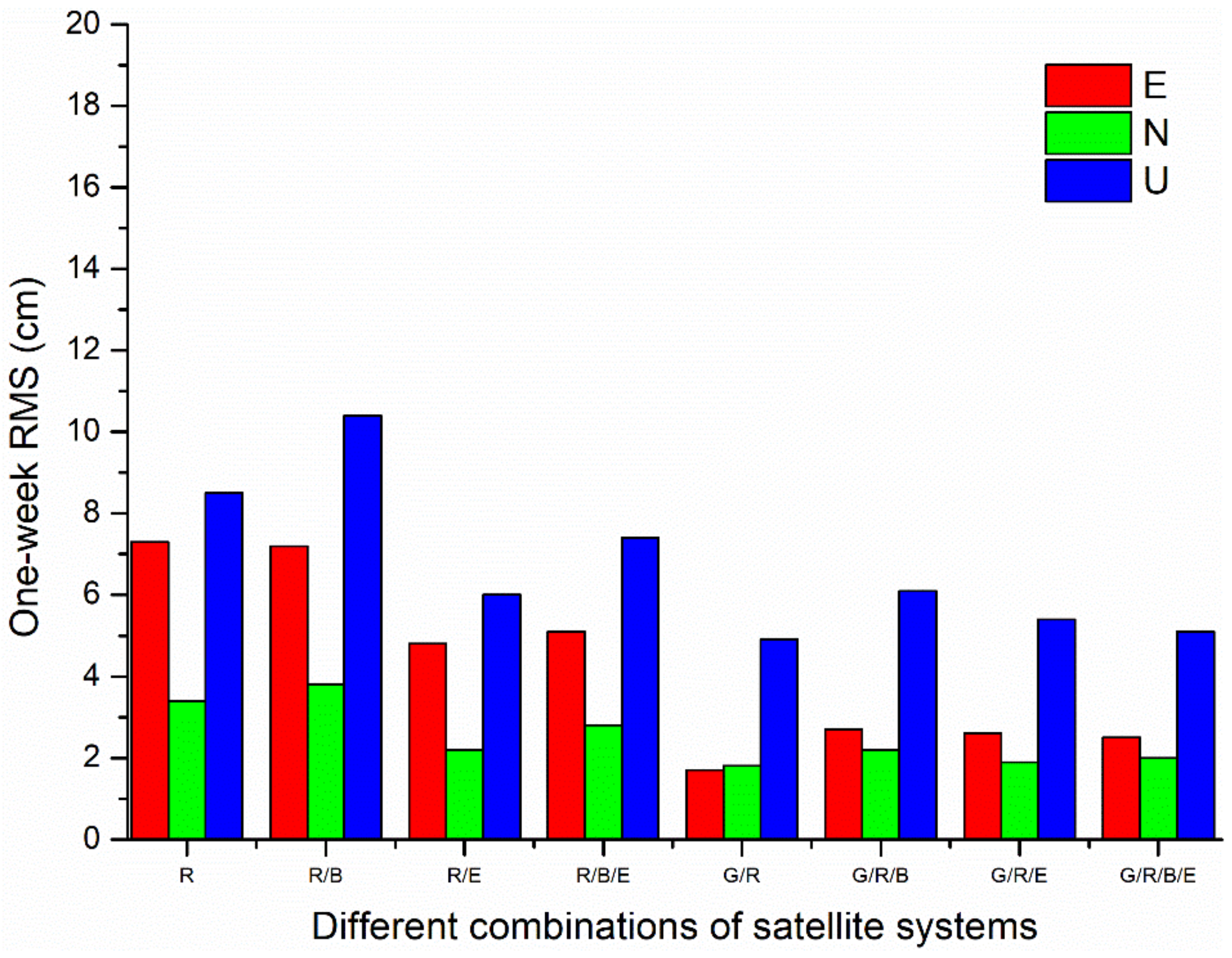
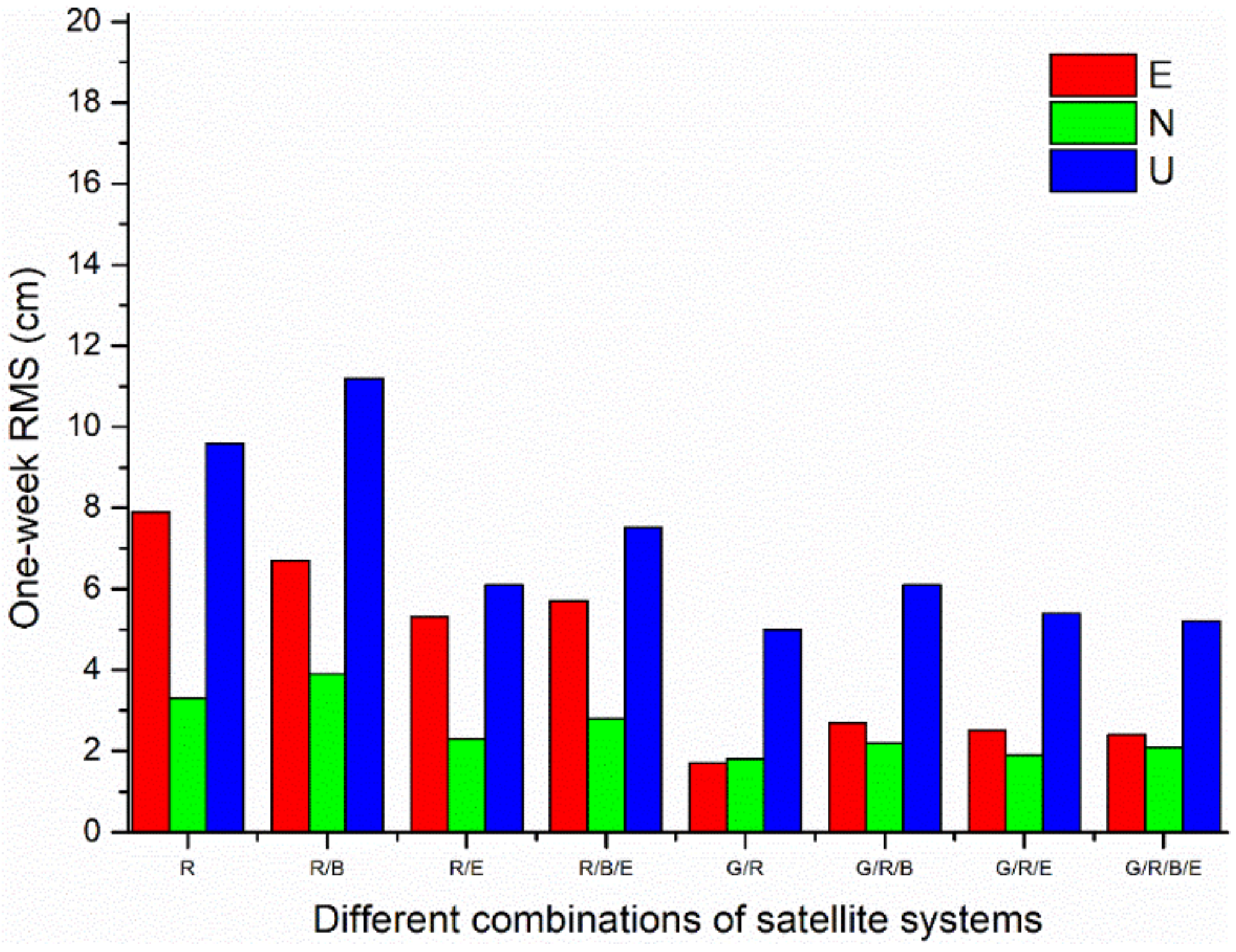
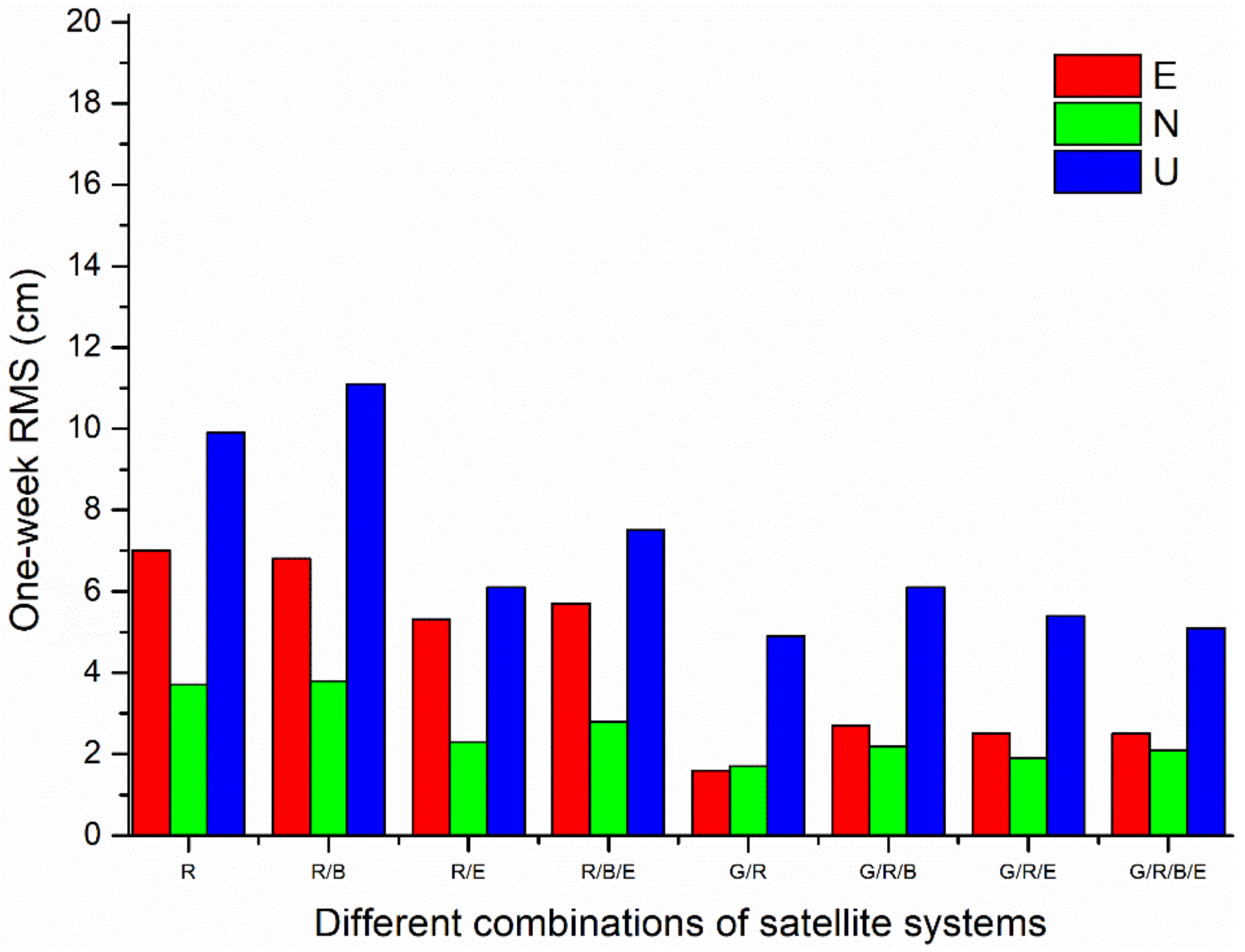
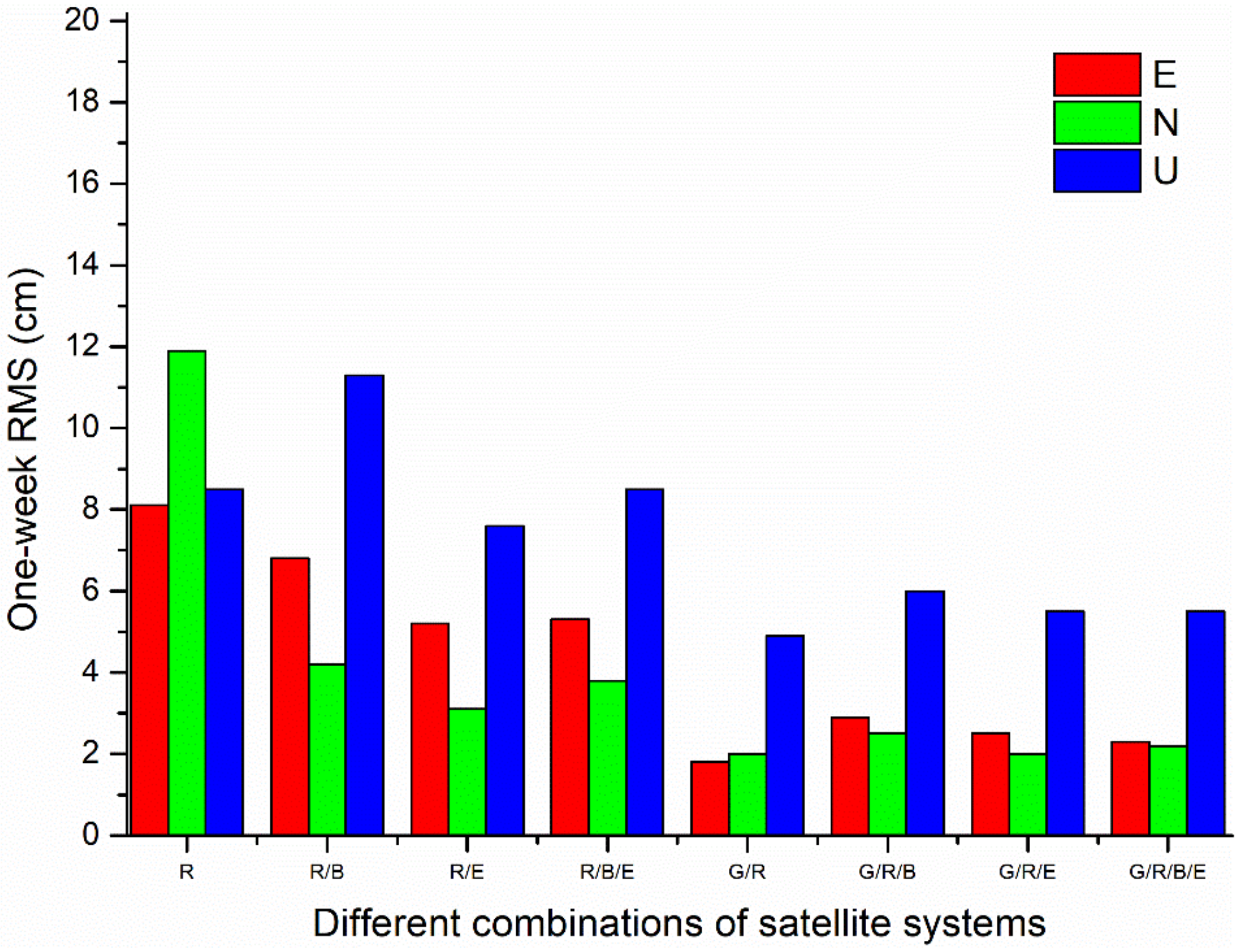
First, the positioning accuracy of four IFCB models for different combined solutions is analyzed in both static and kinematic modes with respect to the IGS weekly solutions. The positioning accuracies of different combined solutions for the same IFCB model are not very different in the three directions using the one-week observation data in static mode. The positioning accuracies of the same combination for these four IFCB models in static mode are also compatible in the three directions using the one-week observation data. In static mode, the average accuracies of the positioning results are 0.5, 0.4, and 1.2 cm in the E, N, and U directions, respectively. In kinematic mode, the positioning accuracies of different combined solutions are very different in the three directions for each IFCB model. However, the positioning accuracies of the same combination for these four IFCB models are almost the same in the E, N, and U directions using the one-week observation data. In kinematic mode, the average accuracies of the positioning results in the E, N, and U directions are 4.4, 2.5, and 6.7 cm, respectively. The results also reveal that the combinations with GPS data have better accuracy in three directions than other combinations in kinematic mode.
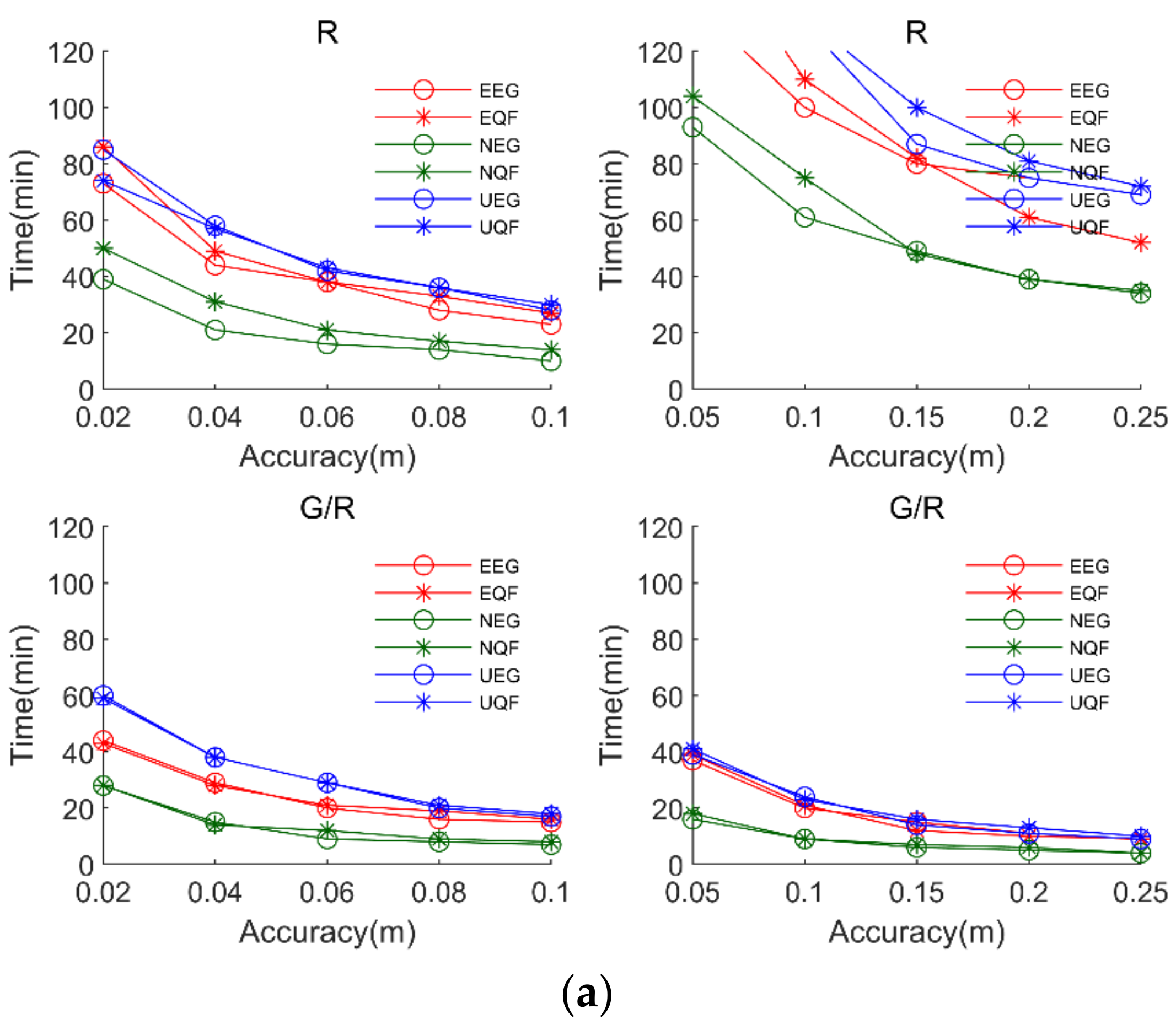
Second, the results show that the convergence time of the LF model overall is better than that of the NF model. For 68% of the total stations, compared to those of the NF model, the convergence times of the LF model in the E, N, and U directions are improved by 23%, 25%, and 24% in the static case, respectively, and by −6%, 20%, and 19% in the kinematic case, respectively; for 95% of the total stations, the improvements are 19%, 27%, and 0% in the static case, and 10%, 19%, and 33% in the kinematic case. For 68% of the total stations, compared to those of the LF model, the convergence times of the QF model in the E, N, and U directions are improved by 3%, 0%, and 0% in the static case, respectively, and by 4%, −4%, and 7% in the kinematic case, respectively; for 95% of the total stations, the improvements are 29%, −5%, and 36% in the static case, and 1%, 3%, and 0.4% in the kinematic case. The experimental results also show that the quadratic function can be used to estimate the IFCB regardless of whether the IFCB satisfies the primary function or the quadratic function.
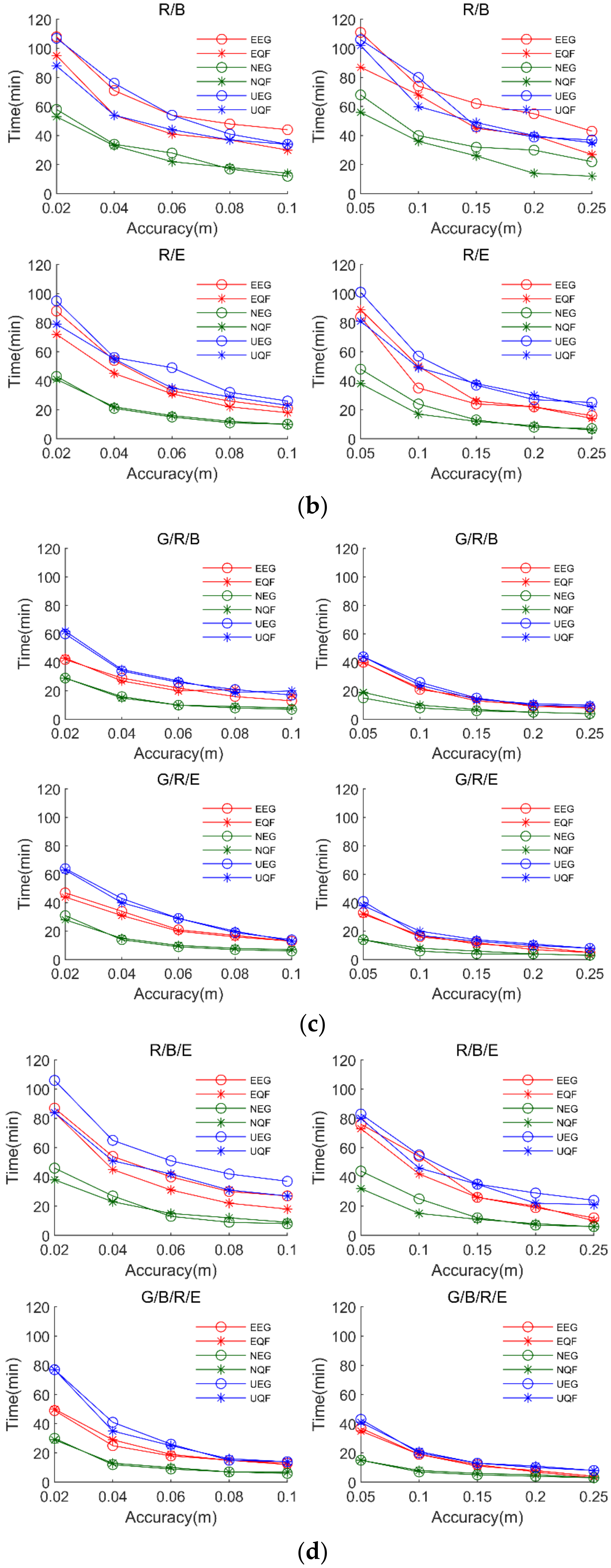
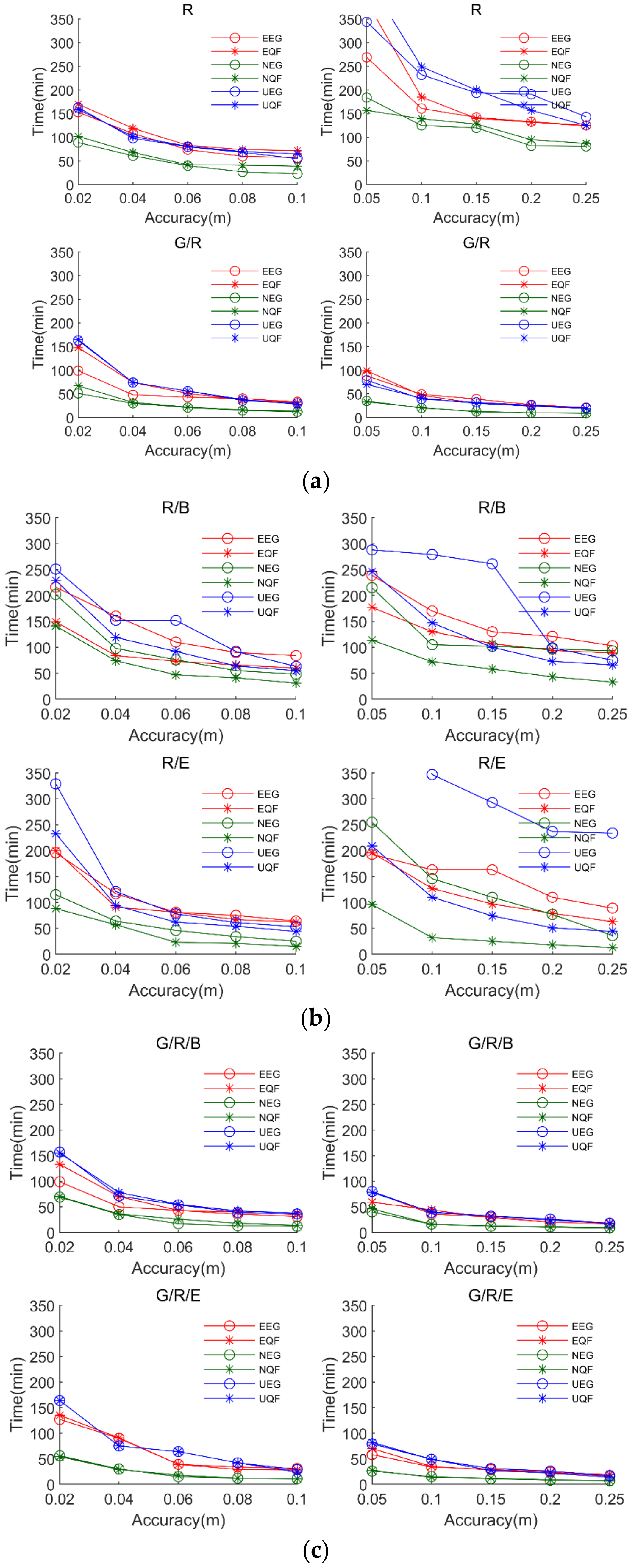
For the QF model and EG model, the convergence time of the EG model is better than that of the QF model for combinations such as GLONASS-only and GPS/GLONASS, which is consistent with the conclusions in the previous study [
31], but the improvement rate does not exceed 22%. For the rest of the combinations that do not contain GPS data, the convergence speed of the QF model is much better than that of the EG model. The improvement rate in some directions is more than 50%. The results also show that the convergence time is related not only to the IFCB models, but also to the addition of other constellations. To better study the IFCB model, we study the convergence speed of the combined solutions with different accuracy thresholds. The results show that for some combinations, the EG models indeed converge slightly faster than QF models, but in some combinations, the QF models converge much faster than the EG models.
Third, in the combinations that contain GPS data, the EG model and QF model have almost the same data utilization in both static and kinematic modes, while in the combinations that do not contain GPS data, the data utilization of the EG model is less than that of the QF model in both static and kinematic modes. In summary, the EG model and the QF model can achieve the same accuracy in both static and kinematic modes after long-term observation. In some combinations, the convergence time of the EG model is better than that of the QF model in three directions, but the improvement is limited. In other combinations, the convergence time of the QF model is much better than that of the EG model in three directions. For the combinations including GPS data, the QF model and EG model have almost the same data utilization values; for the combinations not including GPS data, the QF model has higher data utilization than the EG models. Therefore, considering the positioning accuracy, convergence time, data utilization, and reliability of the function model, we suggest using the QF model to estimate IFCB.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}