
A Bibliometric Review of the Use of Unmanned Aerial Vehicles in Precision Agriculture and Precision Viticulture for Sensing Applications




Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
2.2.1. Design of the Study
- Why are UAVs required in PA?Section 3 of this review study explored the solution to this question. The purpose of this research question is to examine the developments in the use of UAV-PV.
- What nations are pioneering research on the use of UAV-PA and UAV-PV?Section 4.1 and Section 5.1 show the solution with their respective publications.
- Which journals are chosen by researchers for publication, which funding agencies are accessible, which prominent researchers are active in the field, and which universities/institutions are active in the field of UAV-PA and UAV-PV? The answers to these concerns can be found in subsections of Section 4 and Section 5, respectively. Section 6 contains information about major universities/institutions active in the area of UAV-PA and UAV-PV. In addition, the future scope towards the PV’s technological development is also reported in this section.
2.2.2. Data Collection
2.2.3. Data Preparation
2.2.4. Data Analysis
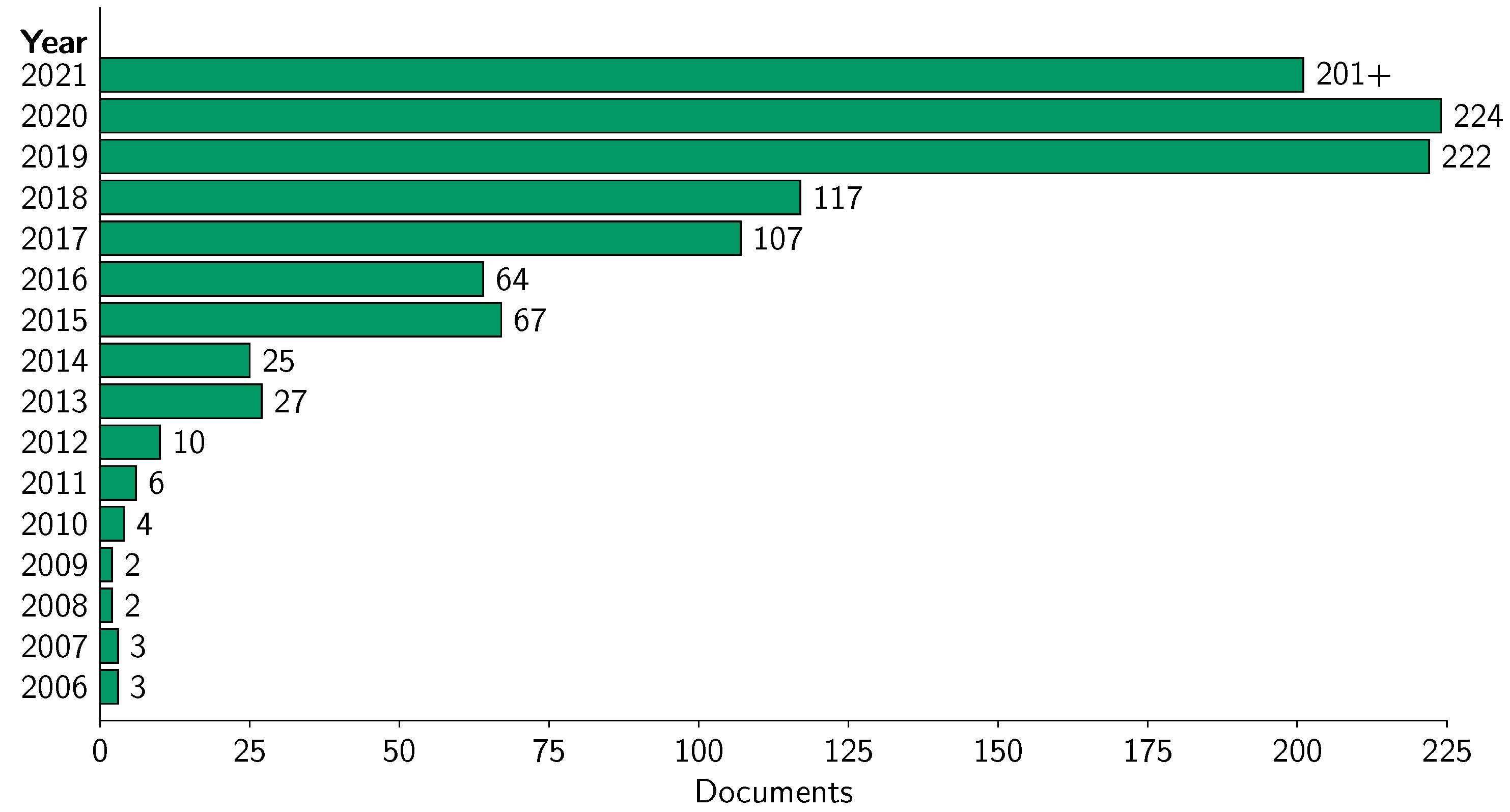
- Worldwide published documents based on year-wise and country-wise on adopting UAV-PA and UAV-PV: Under this analysis, we analyzed the documents published during the considered time-span that are fetched from the database, and arranged them according to the year of publication and presented in graphical form. We applied the same methods for country-specific publications.
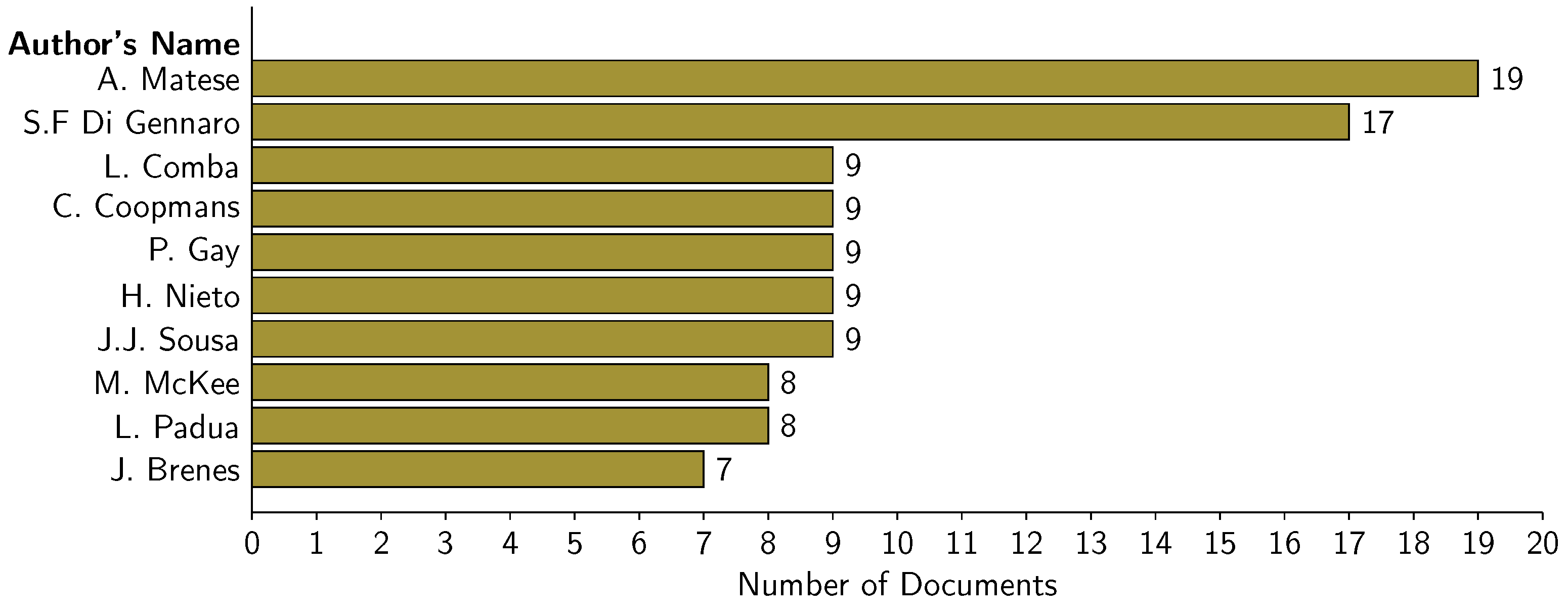
- Influenced authors world wide on adopting UAV-PA and UAV-PV: The world recognizes excellent research, and hence, we chose three different categories to identify leading authors on adopting UAV-PA and UAV-PV. These are: (i) on the basis of author’s citation count, (ii) on the basis of most cited documents, and (iii) on the basis of the number of documents produced by an author, and accordingly, we presented the results in this manuscript.
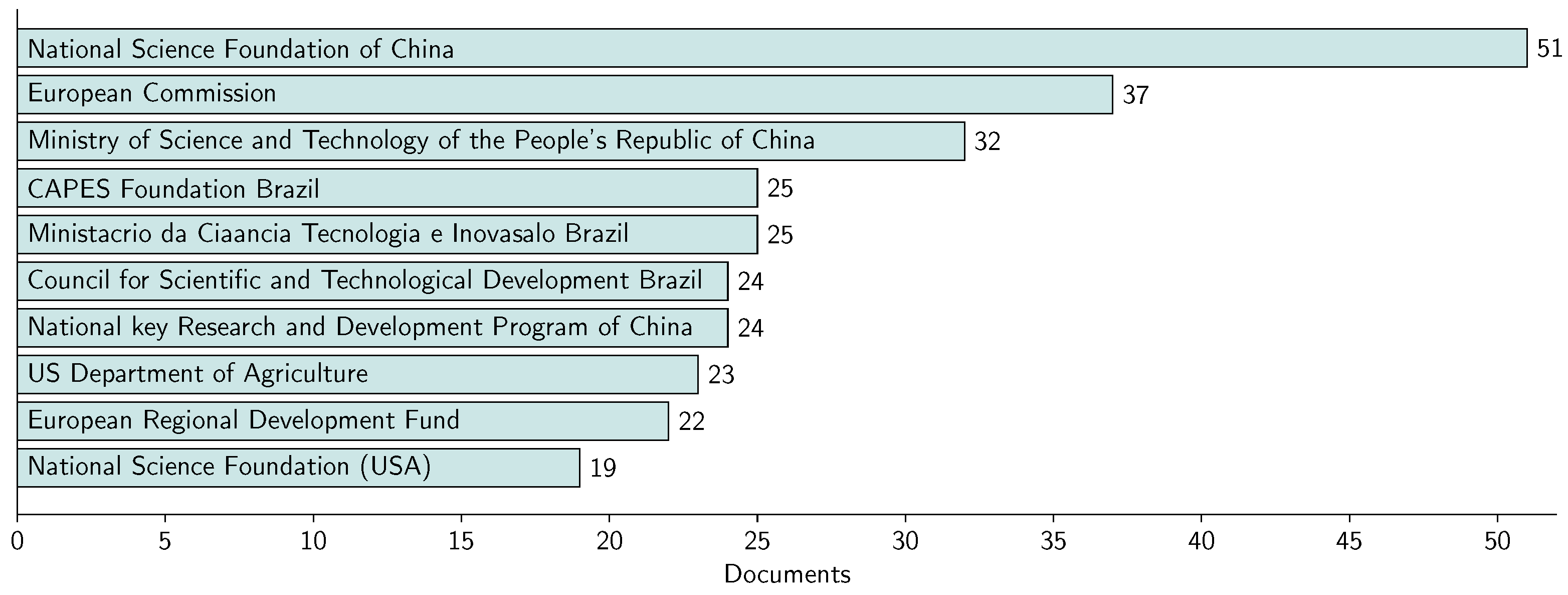
- Most preferred journals and popular funding sponsors: To choose most preferred journals, it is obvious to go for the number of articles published in the specific journals on adopting UAV-PA and UAV-PV, and the same we applied to the popular funding sponsors.
- Leading institutions based on the citation counts on adopting UAV-PA and UAV-PV: To identify leading institutions, we again focused on the citation count of the articles published by an institute on adopting UAV-PA and UAV-PV.
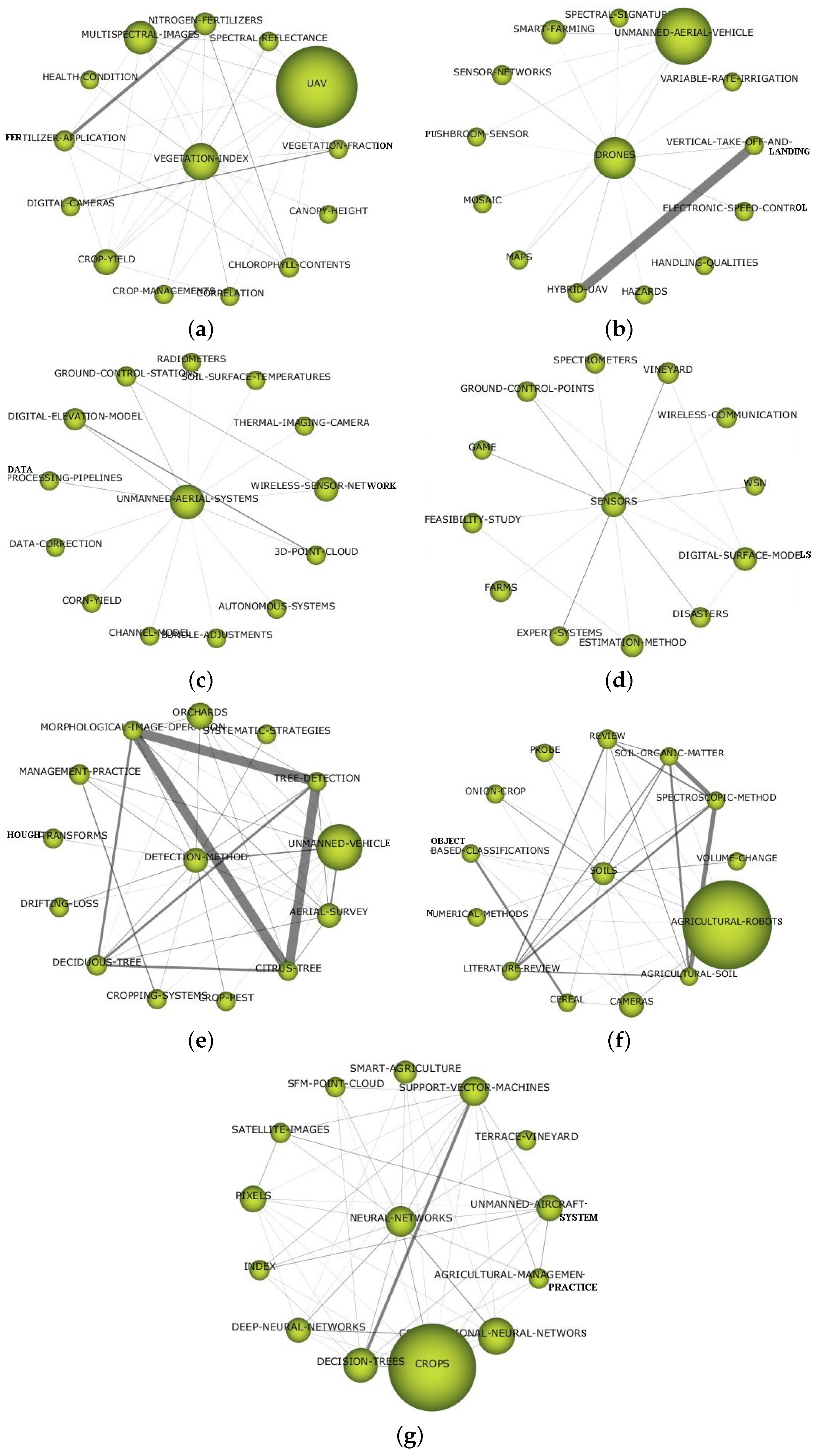
2.2.5. Evaluation of the Terminologies towards the Use of UAV-PA
- Vegetation Index (VI): VI is a common term for a class of indices that are used in agriculture to derive a plant’s status via the observation of their reflected spectrum in multiple bands [50]. Plants take in these lights and reflect near infrared (NIR), which a human eye cannot see. Stressed or dead leaves will show more red light than healthy leaves. Another term associated with VI is the Normalized Difference VI (NDVI), where the health status is derived by considering a plant’s reflected spectrum in the near-infrared and that in the visible range (red wavelengths). It is good to use the NDVI index to figure out how healthy the plants are and how much biomass they have. When the field is covered in healthy leaves, the NDVI index goes up. If an area is there with a lot of vegetation, then NDVI may not be able to see very small changes in the plants. Other approaches based on spectral indices are available and are quite commonly employed, for more details on indices, one may consult [51]. In addition to monitoring plant health, VI is very important in determining canopy height, chlorophyll content, when to start fertilizer, and when to start irrigation.
- UAVs: UAVs are now becoming more popular when it comes to monitoring, not only when applied to agriculture but also the other important aspects, such as power-line inspection, pipeline monitoring, building and structure monitoring etc. UAVs can fly autonomously over the area and take images of the various regions. The information regarding where the vulnerabilities are present in the field is extracted from these snapshots using standard tools. A decision support system uses this information to determine how much fertilizer, water, or other resources are essential and in what quantities. UAVs are becoming increasingly popular for monitoring, not just in agriculture, but also in other critical areas, such as power-line inspection, pipeline monitoring, construction and structural monitoring, and so on.
- Unmanned Aerial Systems (UAS): The term UAS refers to the ensemble drones, ground control systems, the cameras, GNSS, the software, maintenance tools that are required to operate and enable UAVs to fly autonomously or remotely. UAS gives freedom to the growers to make the decision online and, as an example of UAS system, the article [52] can be followed to see how the UAV and the associated sensory devices work in decision making.It is critical to note that the term remotely piloted aircraft (RPA) systems has been used multiple times to refer to UAS systems. A review of RPA applications in PA is provided in [53], where the authors use the term RPA to refer to UAVs or drones. Additionally, the review article [54] discussed drones and RPAs as well as those with the same name as RPAs that have been used in agriculture. In [55], a technique for developing and constructing a prototype of a low-cost quadcopter-type RPA for precision agriculture applications is described.
- Sensors: Sensors are becoming less expensive and more advanced as technology advances. The sensors are the backbone of the PA, providing vital information about variability in farm areas. Sensors are also utilized to determine the viability of a given crop being grown on farm area. Wireless sensors have been widely used to collect data from farm fields and interact with UASs for further processing and decision making. It is a good to follow [56] for additional information on sensors and sensory devices.
- Detection Methods: There are various kinds of detection methods from the farm available in the literature that talk about, for example, disease detection [57], crop row detection [58], fruit detection [59], tree detection [60], weed detection [61], etc., using UAV. These detection methods further help in the decision making process in the farm.
- Soils: The first and utmost importance is given to soil management for PA [7]. Soil management is a way of bifurcating the field into different categories depending on soil content. The soil samples can be collected from different points/locations from the field. The soil quality can be measured in the laboratories using the collected samples and, depending on the categorization, it can be implemented [62]. The color variations in the images of the soil acquired by drones after plowing the fields play an important role in segregating the fields [7]. However, soil management is usually very expensive and time-consuming since, in order to be effective, it has to be run continuously. Similar outcomes but with very less effort can be obtained using UAVs equipped with RGB cameras: through the acquisition of several RGB images from the field, it is possible to infer whether the soil is sunny-wet, sunny-dry, shadow-wet, shadow-dry and also other decisions via an off-line image processing [63].
- Neural Networks (NNs): PA practices rely on accurate mapping of farmlands. A neural network is a system for managing and mapping UAV remote sensing for the best outcomes. When applied to UAVs for PA, NNs proved to be the best in remote sensing in several situations. A multispectral camera along with the NNs has shown that a semantic segmentation of citrus orchards is highly achievable with deep neural networks [64]. Based on an NN technique, a methodology given in [65] proposes an automatic strategy for the large-scale mapping of date palm trees from very-high-spatial-resolution UAV images. NNs also played an important role in spraying UAVs. For example, Khan et al. in [66] proposed an accurate real-time recognition method based on NNs which is critical for UAV-based sprayers.
3. Why UAV in PA?
Technologies of UAV in PA
4. Why UAV in PV?
4.1. Technologies of UAV in PV
5. Results
5.1. Global Trends in Adopting the UAV-PA
5.1.1. Worldwide Published Documents by Countries on Adopting UAV-PA
5.1.2. Worldwide Published Documents by Authors on Adopting UAV-PA
5.1.3. The Top Ten Journals with the Most Publications and Top Funding Sponsors on Adopting UAV-PA
5.2. Global Trends in Adopting the UAV-PV
5.2.1. Worldwide Published Documents by Countries on Adopting UAV-PV
5.2.2. Worldwide Published Documents by Authors on Adopting UAV-PV
5.2.3. The Top Five Journals with the Most Publications and Funding Sponsors on Adopting UAV-PV
6. Findings and Discussion
- Soil categorization: When the vegetation indices values were utilized as input data in trained techniques, the best performance in the categorization of vineyard soil RGB pictures was obtained, with overall accuracy values around and high sensitivity values for the soil [97]. To monitor farmland soil parameters and crop growth, the UAV’s remote sensing have been equipped with high-resolution hyperspectral sensors [98].
- Weed detection and control: In vineyards, bermudagrass is a major issue. The spectral closeness of grapevines and bermudagrass makes it tough to distinguish the two species using just spectral information from a multi-band image sensor. Using ultra-high spatial resolution UAV pictures and object-based image analysis, this problem has been solved and the accuracy of this approach to distinguishing between grapevines and bermudagrass (Cynodon dactylon) is better than [134]. Additionally, an algorithm is proposed in [135] for detecting and mapping the presence of bermudagrass based on spatial information, as well as for accurately mapping the presence of vines, cover crops, Cynodon dactylon, and bare soil in order to apply site-specific treatment to the vegetation. Furthermore, this research claims to be effective in controlling bermudagrass in a short amount of time. As a result, the combination of UAV imagery and the algorithm would enable farmers to continue cover crop-based management schemes in their vineyards while also controlling bermudagrass.
- Disease detection: Disease detection is essential in preventing the disease from spreading further in the vineyard. If the disease spreads in vineyards, it has severe economic effects for the growers, and detecting the disease in the vineyard is one of the most difficult tasks for viticulturists. A deep learning technique was reported in [136] to identify areas of infection in the grapevine using the UAV by taking images in the visible domain and then processing them with convolution neural networks to detect the symptoms. This paper also claims that the technique used is more than accurate in detecting the infection. Flavescence dorée, a form of grape vine disease, that can be identified using UAV multispectral data as reported in [57]. This study also examines the potential for 20 variables, i.e., 11 related to vegetation indices, 5 depend on spectral bands, and 4 associated with biophysical parameters, to be computed from UAV multispectral imagery in order to remotely identify symptomatic from asymptomatic areas in a vineyard.
- Monitoring the vegetation and irrigation control: Due to the direct relation between radiation interception and evaporative surface, the canopy cover maps are used for irrigation management primarily in order to calculate the basic evapotranspire coefficient. Crop size and temporal development rely on the water supply, and crop canopy maps are accordingly measured to identify spatial irrigation system consistency. The results of [137] showed that the green-red vegetation index (GRVI) is appropriate for assessing vegetation cover. When it came to recognizing phenological crop changes and detecting variety in field irrigation, the GRVI outperformed the NDVI. Motohka et al. [138] suggested the usage of GRVI, which may be calculated using the formulawhere is green reflectance, and is reflectance of visible red. This GRVI is used to determine (i) Green vegetation: is higher than , (ii) Soils: is lower than , and (iii) Water or snow: and are almost the same.
- Grapevine maturity: It was discovered in [139] that by using spectral information gathered from a UAV, it is possible to distinguish between vines of various vigor in a Guyot-trained, mature vineyard of ‘Sangiovese’ located in Tuscany. A system for determining the ripeness of grape clusters has been developed by the researchers in Spain [140]. When a grape begins to become bluish, it is presumed to be ripe, and using simple image processing and filtering, it is possible to identify mature grape clusters in a short amount of time.
- Yield estimation: Forecasting yields is critical for harvest management and scheduling wine-making activities. Traditional yield prediction approaches are time-consuming and depend on manual sampling, making it challenging to account for vineyards’ inherent geographical variability. In [140], an unsupervised and automated method for detecting grape clusters in red grapevine types is established using UAV photogrammetric technique and color indices, with values greater than . This precision gained in grape detection opens the door to red grape vineyard production prediction. Every farmer aspires to forecast their vineyard’s yield estimation in advance, and hence yield prediction is an important issue in vineyard management in order to achieve the required grape production and quality. In [141], an automated system is being developed that can predict yield estimation (5 weeks before harvest) using high-resolution RGB photos and a UAV platform throughout the vineyard. A technique has also been developed in [142] for capturing multispectral imagery through UAV, which is then processed together with artificial neural networks to create a relationship between the vegetation index, vegetated fraction cover, and yield. This technique demonstrates that when machine learning is used, the outcomes are significantly more accurate. Although promising results were obtained earlier in the development process, more exact yield forecasts were achieved when images were captured nearer to the harvest date.
6.1. Some Lights on Economic Analysis
6.2. Future Possibilities
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GIS | Geographic Information Systems |
| GPS | Global Positioning System |
| GRVI | Green-Red Vegetation Index |
| GNSS | Global Navigation Satellite System |
| IoT | Internet of Things |
| LAI | Leaf Area Index |
| NIR | Near Infrared |
| NDVI | Normalised Difference Vegetation Index |
| PA | Precision Agriculture |
| PV | Precision Viticulture |
| RGB | Red, Green, and Blue |
| RPA | Remotely Piloted Aircraft |
| UAV | Unmanned Aerial Vehicle |
| UAV-PA | Unmanned Aerial Vehicle in Precision Agriculture |
| UAV-PV | Unmanned Aerial Vehicle in Precision Viticulture |
| WSN | Wireless Sensor Network |
References
- Langemeier, M.; Boehlje, M. What Will Be the Capabilities and Skills Needed to Manage the Farm of the Future? Farmdoc Dly. 2021, 11, 1–4. [Google Scholar]
- Zangina, U.; Buyamin, S.; Aman, M.N.; Abidin, M.S.Z.; Mahmud, M.S.A. A greedy approach to improve pesticide application for precision agriculture using model predictive control. Comput. Electron. Agric. 2021, 182, 105984. [Google Scholar] [CrossRef]
- Hedley, C. The role of precision agriculture for improved nutrient management on farms. J. Sci. Food Agric. 2015, 95, 12–19. [Google Scholar] [CrossRef]
- Beyer, M.; Wallner, M.; Bahlmann, L.; Thiemig, V.; Dietrich, J.; Billib, M. Rainfall characteristics and their implications for rain-fed agriculture: A case study in the Upper Zambezi River Basin. Hydrol. Sci. J. 2016, 61, 321–343. [Google Scholar] [CrossRef]
- Yang, C.; Everitt, J.H.; Du, Q.; Luo, B.; Chanussot, J. Using high-resolution airborne and satellite imagery to assess crop growth and yield variability for precision agriculture. Proc. IEEE 2012, 101, 582–592. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Huuskonen, J.; Oksanen, T. Soil sampling with drones and augmented reality in precision agriculture. Comput. Electron. Agric. 2018, 154, 25–35. [Google Scholar] [CrossRef]
- Khanal, S.; Fulton, J.; Shearer, S. An overview of current and potential applications of thermal remote sensing in precision agriculture. Comput. Electron. Agric. 2017, 139, 22–32. [Google Scholar] [CrossRef]
- Martínez, J.; Egea, G.; Agüera, J.; Pérez-Ruiz, M. A cost-effective canopy temperature measurement system for precision agriculture: A case study on sugar beet. Precis. Agric. 2017, 18, 95–110. [Google Scholar] [CrossRef]
- Onibonoje, M.O.; Nwulu, N. Synergistic Technologies for Precision Agriculture. In Artificial Intelligence and IoT-Based Technologies for Sustainable Farming and Smart Agriculture; IGI Global: Hershey, PA, USA, 2021; pp. 123–139. [Google Scholar]
- Lieve, W.V. Precision Agriculture and the Future of Farming in Europe; Scientific Foresight Unit (STOA): Brussels, Belgium, 2016. [Google Scholar]
- Xu, X.; Fan, L.; Li, Z.; Meng, Y.; Feng, H.; Yang, H.; Xu, B. Estimating Leaf Nitrogen Content in Corn Based on Information Fusion of Multiple-Sensor Imagery from UAV. Remote Sens. 2021, 13, 340. [Google Scholar] [CrossRef]
- Zhou, X.; He, J.; Chen, D.; Li, J.; Jiang, C.; Ji, M.; He, M. Human-robot skills transfer interface for UAV-based precision pesticide in dynamic environments. Assem. Autom. 2021, 41, 345–357. [Google Scholar] [CrossRef]
- Zhou, Z.; Majeed, Y.; Naranjo, G.D.; Gambacorta, E.M. Assessment for crop water stress with infrared thermal imagery in precision agriculture: A review and future prospects for deep learning applications. Comput. Electron. Agric. 2021, 182, 106019. [Google Scholar] [CrossRef]
- Basso, B.; Antle, J. Digital agriculture to design sustainable agricultural systems. Nat. Sustain. 2020, 3, 254–256. [Google Scholar] [CrossRef]
- Xiao, K.; Xiao, D.; Luo, X. Smart water-saving irrigation system in precision agriculture based on wireless sensor network. Trans. Chin. Soc. Agric. Eng. 2010, 26, 170–175. [Google Scholar]
- Gómez-Candón, D.; De Castro, A.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef] [Green Version]
- Bonfante, A.; Monaco, E.; Manna, P.; De Mascellis, R.; Basile, A.; Buonanno, M.; Cantilena, G.; Esposito, A.; Tedeschi, A.; De Michele, C.; et al. LCIS DSS—An irrigation supporting system for water use efficiency improvement in precision agriculture: A maize case study. Agric. Syst. 2019, 176, 102646. [Google Scholar] [CrossRef]
- Burkart, A.; Hecht, V.; Kraska, T.; Rascher, U. Phenological analysis of unmanned aerial vehicle based time series of barley imagery with high temporal resolution. Precis. Agric. 2018, 19, 134–146. [Google Scholar] [CrossRef]
- Brown, R.M.; Dillon, C.R.; Schieffer, J.; Shockley, J.M. The carbon footprint and economic impact of precision agriculture technology on a corn and soybean farm. J. Environ. Econ. Policy 2016, 5, 335–348. [Google Scholar] [CrossRef]
- Al-Gaadi, K.A.; Hassaballa, A.A.; Tola, E.; Kayad, A.G.; Madugundu, R.; Alblewi, B.; Assiri, F. Prediction of potato crop yield using precision agriculture techniques. PLoS ONE 2016, 11, e0162219. [Google Scholar] [CrossRef]
- Colaço, A.F.; Molin, J.P.; Rosell-Polo, J.R. Spatial variability in commercial orange groves. Part 1: Canopy volume and height. Precis. Agric. 2019, 20, 788–804. [Google Scholar] [CrossRef] [Green Version]
- Álamo, S.; Ramos, M.; Feito, F.; Cañas, A. Precision techniques for improving the management of the olive groves of southern Spain. Span. J. Agric. Res. 2012, 10, 583–595. [Google Scholar] [CrossRef] [Green Version]
- Winkler, A.J. General Viticulture; University of California Press: Berkeley, CA, USA, 1974. [Google Scholar]
- Sassu, A.; Gambella, F.; Ghiani, L.; Mercenaro, L.; Caria, M.; Pazzona, A.L. Advances in Unmanned Aerial System Remote Sensing for Precision Viticulture. Sensors 2021, 21, 956. [Google Scholar] [CrossRef]
- Spachos, P.; Gregori, S. Integration of wireless sensor networks and smart uavs for precision viticulture. IEEE Internet Comput. 2019, 23, 8–16. [Google Scholar] [CrossRef]
- López-Granados, F.; Torres-Sánchez, J.; Jiménez-Brenes, F.M.; Oneka, O.; Marín, D.; Loidi, M.; de Castro, A.I.; Santesteban, L.G. Monitoring vineyard canopy management operations using UAV-acquired photogrammetric point clouds. Remote Sens. 2020, 12, 2331. [Google Scholar] [CrossRef]
- De Castro, A.I.; Jiménez-Brenes, F.M.; Torres-Sánchez, J.; Peña, J.M.; Borra-Serrano, I.; López-Granados, F. 3-D characterization of vineyards using a novel UAV imagery-based OBIA procedure for precision viticulture applications. Remote Sens. 2018, 10, 584. [Google Scholar] [CrossRef] [Green Version]
- Di Gennaro, S.F.; Dainelli, R.; Palliotti, A.; Toscano, P.; Matese, A. Sentinel-2 validation for spatial variability assessment in overhead trellis system viticulture versus UAV and agronomic data. Remote Sens. 2019, 11, 2573. [Google Scholar] [CrossRef] [Green Version]
- Torres-Sánchez, J.; Marín, D.; De Castro, A.; Oria, I.; Jiménez-Brenes, F.; Miranda, C.; Santesteban, L.; López-Granados, F. Assessment of vineyard trimming and leaf removal using UAV photogrammetry. In Precision Agriculture’19; Wageningen Academic Publishers: Wageningen, The Netherlands, 2019; p. e0130479. [Google Scholar]
- Romboli, Y.; Di Gennaro, S.; Mangani, S.; Buscioni, G.; Matese, A.; Genesio, L.; Vincenzini, M. Vine vigour modulates bunch microclimate and affects the composition of grape and wine flavonoids: An unmanned aerial vehicle approach in a Sangiovese vineyard in Tuscany. Aust. J. Grape Wine Res. 2017, 23, 368–377. [Google Scholar] [CrossRef]
- Mondello, V.; Larignon, P.; Armengol Fortí, J.; Kortekamp, A.; Váczy, K.; Prezman, F.; Serrano, E.; Rego, C.; Mugnai, L.; Fontaine, F. Management of grapevine trunk diseases: Knowledge transfer, current strategies and innovative strategies adopted in Europe. Phytopathol. Mediterr. 2018, 57, 369–383. [Google Scholar]
- Santos, J.A.; Fraga, H.; Malheiro, A.C.; Moutinho-Pereira, J.; Dinis, L.T.; Correia, C.; Moriondo, M.; Leolini, L.; Dibari, C.; Costafreda-Aumedes, S.; et al. A review of the potential climate change impacts and adaptation options for European viticulture. Appl. Sci. 2020, 10, 3092. [Google Scholar] [CrossRef]
- Bramley, R.; Pearse, B.; Chamberlain, P. Being profitable precisely-a case study of precision viticulture from Margaret River. Aust. N. Z. Grapegrow. Winemak. 2003, 84–87. [Google Scholar]
- Arnó Satorra, J.; Martínez Casasnovas, J.A.; Ribes Dasi, M.; Rosell Polo, J.R. Precision viticulture. Research topics, challenges and opportunities in site-specific vineyard management. Span. J. Agric. Res. 2009, 7, 779–790. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef] [Green Version]
- Pallottino, F.; Biocca, M.; Nardi, P.; Figorilli, S.; Menesatti, P.; Costa, C. Science mapping approach to analyze the research evolution on precision agriculture: World, EU and Italian situation. Precis. Agric. 2018, 19, 1011–1026. [Google Scholar] [CrossRef]
- Santana, L.S.; Teodoro, A.J.d.S.; Santana, M.S.; Rossi, G.; Palchetti, E. Advances in Precision Coffee Growing Research: A Bibliometric Review. Agronomy 2021, 11, 1557. [Google Scholar] [CrossRef]
- Abdollahi, A.; Rejeb, K.; Rejeb, A.; Mostafa, M.M.; Zailani, S. Wireless Sensor Networks in Agriculture: Insights from Bibliometric Analysis. Sustainability 2021, 13, 12011. [Google Scholar] [CrossRef]
- Lara, M.d.J.D.; Bernabe, J.G.; Benítez, R.Á.G.; Toxqui, J.M.; Huerta, M.K. Bibliometric Analysis of the Use of the Internet of Things in Precision Agriculture. In Proceedings of the 2021 IEEE International Conference on Engineering Veracruz (ICEV), Boca del Rio, Mexico, 25–28 October 2021; pp. 1–5. [Google Scholar]
- Bertoglio, R.; Corbo, C.; Renga, F.M.; Matteucci, M. The Digital Agricultural Revolution: A Bibliometric Analysis Literature Review. IEEE Access 2021, 9, 134762–134782. [Google Scholar] [CrossRef]
- Sott, M.K.; Nascimento, L.d.S.; Foguesatto, C.R.; Furstenau, L.B.; Faccin, K.; Zawislak, P.A.; Mellado, B.; Kong, J.D.; Bragazzi, N.L. A Bibliometric Network Analysis of Recent Publications on Digital Agriculture to Depict Strategic Themes and Evolution Structure. Sensors 2021, 21, 7889. [Google Scholar] [CrossRef]
- Aleixandre-Benavent, R.; Aleixandre-Tudo, J.L.; Ferrer-Sapena, A.; Aleixandre, J.L.; Alcaide, G.G.; Du Toit, W. Bibliometric analysis of publications by South African viticulture and oenology research centres. S. Afr. J. Sci. 2012, 108, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Costa, C.; Biocca, M.; Pallottino, F.; Nardi, P.; Figorilli, S. Structure of the precision agriculture research in Italy from 2000 to 2016: A term mapping approach. Chem. Eng. Trans. 2017, 58, 643–648. [Google Scholar]
- Sånchez, G.C.; Castro-López, L.; Méndez, S. Contribution of Mexican scholars to viticultural and oenological research: Where do we stand? Oeno One 2018, 52, 273–278. [Google Scholar]
- Van Eck, N.J.; Waltman, L. Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cobo, M.J.; López-Herrera, A.G.; Herrera-Viedma, E.; Herrera, F. SciMAT: A new science mapping analysis software tool. J. Am. Soc. Inf. Sci. Technol. 2012, 63, 1609–1630. [Google Scholar] [CrossRef]
- Waltman, L.; Larivière, V. Special issue on bibliographic data sources. Quant. Sci. Stud. 2020, 1, 360–362. [Google Scholar] [CrossRef]
- Visser, M.; van Eck, N.J.; Waltman, L. Large-scale comparison of bibliographic data sources: Scopus, Web of Science, Dimensions, Crossref, and Microsoft Academic. Quant. Sci. Stud. 2021, 2, 20–41. [Google Scholar] [CrossRef]
- Pop, S.; Cristea, L.; Luculescu, M.C.; Zamfira, S.C.; Boer, A.L. Vegetation Index Estimation in Precision Farming Using Custom Multispectral Camera Mounted on Unmanned Aerial Vehicle. In International Conference on Remote Engineering and Virtual Instrumentation; Springer: Cham, Switzerland, 2019; pp. 674–685. [Google Scholar]
- Shafi, U.; Mumtaz, R.; García-Nieto, J.; Hassan, S.A.; Zaidi, S.A.R.; Iqbal, N. Precision agriculture techniques and practices: From considerations to applications. Sensors 2019, 19, 3796. [Google Scholar] [CrossRef] [Green Version]
- Ezzy, H.; Charter, M.; Bonfante, A.; Brook, A. How the Small Object Detection via Machine Learning and UAS-Based Remote-Sensing Imagery Can Support the Achievement of SDG2: A Case Study of Vole Burrows. Remote Sens. 2021, 13, 3191. [Google Scholar] [CrossRef]
- Santos, L.M.d.; Barbosa, B.D.S.; Andrade, A.D. Use of remotely piloted aircraft in precision agriculture: A review. Dyna 2019, 86, 284–291. [Google Scholar]
- Ahmad, A.; Ordonez, J.; Cartujo, P.; Martos, V. Remotely piloted aircraft (RPA) in agriculture: A pursuit of sustainability. Agronomy 2020, 11, 7. [Google Scholar] [CrossRef]
- Morerira, M.; Ferraz, G.; Barbosa, B.; Iwasaki, E.; Ferraz, P.; Damasceno, F.; Rossi, G. Design and construction of a low-cost remotely piloted aircraft for precision agriculture applications. Agron. Res. 2019, 17, 1984–1992. [Google Scholar]
- Morais, R.; Mendes, J.; Silva, R.; Silva, N.; Sousa, J.J.; Peres, E. A versatile, low-power and low-cost IoT device for field data gathering in precision agriculture practices. Agriculture 2021, 11, 619. [Google Scholar] [CrossRef]
- Albetis, J.; Duthoit, S.; Guttler, F.; Jacquin, A.; Goulard, M.; Poilvé, H.; Féret, J.B.; Dedieu, G. Detection of Flavescence dorée grapevine disease using unmanned aerial vehicle (UAV) multispectral imagery. Remote Sens. 2017, 9, 308. [Google Scholar] [CrossRef] [Green Version]
- Bah, M.D.; Hafiane, A.; Canals, R. CRowNet: Deep network for crop row detection in UAV images. IEEE Access 2019, 8, 5189–5200. [Google Scholar] [CrossRef]
- Apolo-Apolo, O.; Martínez-Guanter, J.; Egea, G.; Raja, P.; Pérez-Ruiz, M. Deep learning techniques for estimation of the yield and size of citrus fruits using a UAV. Eur. J. Agron. 2020, 115, 126030. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual tree detection from unmanned aerial vehicle (UAV) derived canopy height model in an open canopy mixed conifer forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- Bah, M.D.; Hafiane, A.; Canals, R. Deep learning with unsupervised data labeling for weed detection in line crops in UAV images. Remote Sens. 2018, 10, 1690. [Google Scholar] [CrossRef] [Green Version]
- Mouazen, A.M.; De Baerdemaeker, J.; Ramon, H. Towards development of on-line soil moisture content sensor using a fibre-type NIR spectrophotometer. Soil Tillage Res. 2005, 80, 171–183. [Google Scholar] [CrossRef]
- Al-Naji, A.; Fakhri, A.B.; Gharghan, S.K.; Chahl, J. Soil color analysis based on a RGB camera and an artificial neural network towards smart irrigation: A pilot study. Heliyon 2021, 7, e06078. [Google Scholar] [CrossRef]
- Osco, L.P.; Nogueira, K.; Ramos, A.P.M.; Pinheiro, M.M.F.; Furuya, D.E.G.; Gonçalves, W.N.; de Castro Jorge, L.A.; Junior, J.M.; dos Santos, J.A. Semantic segmentation of citrus-orchard using deep neural networks and multispectral UAV-based imagery. Precis. Agric. 2021, 22, 1171–1188. [Google Scholar] [CrossRef]
- Gibril, M.B.A.; Shafri, H.Z.M.; Shanableh, A.; Al-Ruzouq, R.; Wayayok, A.; Hashim, S.J. Deep convolutional neural network for large-scale date palm tree mapping from UAV-based images. Remote Sens. 2021, 13, 2787. [Google Scholar] [CrossRef]
- Khan, S.; Tufail, M.; Khan, M.T.; Khan, Z.A.; Iqbal, J.; Wasim, A. Real-time recognition of spraying area for UAV sprayers using a deep learning approach. PLoS ONE 2021, 16, e0249436. [Google Scholar] [CrossRef]
- Das, S.; Chapman, S.; Christopher, J.; Choudhury, M.R.; Menzies, N.W.; Apan, A.; Dang, Y.P. UAV-thermal imaging: A technological breakthrough for monitoring and quantifying crop abiotic stress to help sustain productivity on sodic soils—A case review on wheat. Remote Sens. Appl. Soc. Environ. 2021, 23, 100583. [Google Scholar] [CrossRef]
- de Castro, A.I.; Shi, Y.; Maja, J.M.; Peña, J.M. UAVs for Vegetation Monitoring: Overview and Recent Scientific Contributions. Remote Sens. 2021, 13, 2139. [Google Scholar] [CrossRef]
- FAO. Declaration of the World Summit on Food Security; FAO: Rome, Italy, 2009. [Google Scholar]
- Madroñal, D.; Palumbo, F.; Capotondi, A.; Marongiu, A. Unmanned Vehicles in Smart Farming: A Survey and a Glance at Future Horizons. In Proceedings of the 2021 Drone Systems Engineering and Rapid Simulation and Performance Evaluation: Methods and Tools Proceedings, 2021 ACM, Budapest, Hungary, 18–20 January 2021; pp. 1–8. [Google Scholar]
- Zhang, H.; Wang, L.; Tian, T.; Yin, J. A Review of Unmanned Aerial Vehicle Low-Altitude Remote Sensing (UAV-LARS) Use in Agricultural Monitoring in China. Remote Sens. 2021, 13, 1221. [Google Scholar] [CrossRef]
- Awais, M.; Li, W.; Cheema, M.M.; Hussain, S.; Shaheen, A.; Aslam, B.; Liu, C.; Ali, A. Assessment of optimal flying height and timing using high-resolution unmanned aerial vehicle images in precision agriculture. Int. J. Environ. Sci. Technol. 2021, 19, 1–18. [Google Scholar] [CrossRef]
- Gago, J.; Douthe, C.; Coopman, R.E.; Gallego, P.P.; Ribas-Carbo, M.; Flexas, J.; Escalona, J.; Medrano, H. UAVs challenge to assess water stress for sustainable agriculture. Agric. Water Manag. 2015, 153, 9–19. [Google Scholar] [CrossRef]
- Bacco, M.; Ferro, E.; Gotta, A. UAVs in WSNs for agricultural applications: An analysis of the two-ray radio propagation model. In Proceedings of the SENSORS, 2014 IEEE, Valencia, Spain, 2–5 November 2014; pp. 130–133. [Google Scholar]
- Daponte, P.; De Vito, L.; Glielmo, L.; Iannelli, L.; Liuzza, D.; Picariello, F.; Silano, G. A review on the use of drones for precision agriculture. IOP Conf. Ser. Earth Environ. Sci. 2019, 275, 012022. [Google Scholar] [CrossRef]
- Shao, G.; Han, W.; Zhang, H.; Liu, S.; Wang, Y.; Zhang, L.; Cui, X. Mapping maize crop coefficient Kc using random forest algorithm based on leaf area index and UAV-based multispectral vegetation indices. Agric. Water Manag. 2021, 252, 106906. [Google Scholar] [CrossRef]
- Mokhtari, A.; Ahmadi, A.; Daccache, A.; Drechsler, K. Actual Evapotranspiration from UAV Images: A Multi-Sensor Data Fusion Approach. Remote Sens. 2021, 13, 2315. [Google Scholar] [CrossRef]
- Lin, Y.C.; Zhou, T.; Wang, T.; Crawford, M.; Habib, A. New orthophoto generation strategies from UAV and ground remote sensing platforms for high-throughput phenotyping. Remote Sens. 2021, 13, 860. [Google Scholar] [CrossRef]
- Maes, W.H.; Huete, A.R.; Steppe, K. Optimizing the processing of UAV-based thermal imagery. Remote Sens. 2017, 9, 476. [Google Scholar] [CrossRef] [Green Version]
- Han, X.; Thomasson, J.A.; Swaminathan, V.; Wang, T.; Siegfried, J.; Raman, R.; Rajan, N.; Neely, H. Field-Based Calibration of Unmanned Aerial Vehicle Thermal Infrared Imagery with Temperature-Controlled References. Sensors 2020, 20, 7098. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Liu, J.; Yang, L.; Chen, Z.; Wang, X.; Ouyang, B. Applications of unmanned aerial vehicle images on agricultural remote sensing monitoring. Trans. Chin. Soc. Agric. Eng. 2013, 29, 136–145. [Google Scholar]
- Li, D.; Li, M. Research advance and application prospect of unmanned aerial vehicle remote sensing system. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 505–513. [Google Scholar]
- Matese, A.; Di Gennaro, S.F. Practical applications of a multisensor UAV platform based on multispectral, thermal and RGB high resolution images in precision viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef] [Green Version]
- Karakizi, C.; Oikonomou, M.; Karantzalos, K. Spectral discrimination and reflectance properties of various vine varieties from satellite, UAV and proximate sensors. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 31. [Google Scholar] [CrossRef] [Green Version]
- Giovos, R.; Tassopoulos, D.; Kalivas, D.; Lougkos, N.; Priovolou, A. Remote Sensing Vegetation Indices in Viticulture: A Critical Review. Agriculture 2021, 11, 457. [Google Scholar] [CrossRef]
- Borgogno-Mondino, E.; Lessio, A.; Tarricone, L.; Novello, V.; de Palma, L. A comparison between multispectral aerial and satellite imagery in precision viticulture. Precis. Agric. 2018, 19, 195–217. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S.F. Beyond the traditional NDVI index as a key factor to mainstream the use of UAV in precision viticulture. Sci. Rep. 2021, 11, 1–13. [Google Scholar] [CrossRef]
- Ata-Ul-Karim, S.T.; Zhu, Y.; Yao, X.; Cao, W. Determination of critical nitrogen dilution curve based on leaf area index in rice. Field Crop. Res. 2014, 167, 76–85. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. Development of an Unmanned Aerial Vehicle (UAV) for hyper resolution vineyard mapping based on visible, multispectral, and thermal imagery. In Proceedings of the 34th International Symposium on Remote Sensing Of Environment, Sydney, Australia, 10–15 April 2011; p. 4. [Google Scholar]
- Córcoles, J.I.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Estimation of leaf area index in onion (Allium cepa L.) using an unmanned aerial vehicle. Biosyst. Eng. 2013, 115, 31–42. [Google Scholar] [CrossRef]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Zhu, G.; Ju, W.; Chen, J.; Liu, Y. A Novel Moisture Adjusted Vegetation Index (MAVI) to reduce background reflectance and topographical effects on LAI retrieval. PLoS ONE 2014, 9, e102560. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Samiappan, S.; Turnage, G.; Hathcock, L.; Yao, H.; Kincaid, R.; Moorhead, R.; Ashby, S. Classifying common wetland plants using hyperspectral data to identify optimal spectral bands for species mapping using a small unmanned aerial systems—A case study. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 5924–5927. [Google Scholar]
- Blekos, K.; Tsakas, A.; Xouris, C.; Evdokidis, I.; Alexandropoulos, D.; Alexakos, C.; Katakis, S.; Makedonas, A.; Theoharatos, C.; Lalos, A. Analysis, Modeling and Multi-Spectral Sensing for the Predictive Management of Verticillium Wilt in Olive Groves. J. Sens. Actuator Netw. 2021, 10, 15. [Google Scholar] [CrossRef]
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A novel methodology for improving plant pest surveillance in vineyards and crops using UAV-based hyperspectral and spatial data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Iizuka, K.; Itoh, M.; Shiodera, S.; Matsubara, T.; Dohar, M.; Watanabe, K. Advantages of unmanned aerial vehicle (UAV) photogrammetry for landscape analysis compared with satellite data: A case study of postmining sites in Indonesia. Cogent Geosci. 2018, 4, 1498180. [Google Scholar] [CrossRef]
- Poblete-Echeverría, C.; Olmedo, G.F.; Ingram, B.; Bardeen, M. Detection and segmentation of vine canopy in ultra-high spatial resolution RGB imagery obtained from unmanned aerial vehicle (UAV): A case study in a commercial vineyard. Remote Sens. 2017, 9, 268. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Wang, S.; Zou, D.; Chen, H.; Zhong, R.; Li, H.; Zhou, W.; Yan, K. Social Network and Bibliometric Analysis of Unmanned Aerial Vehicle Remote Sensing Applications from 2010 to 2021. Remote Sens. 2021, 13, 2912. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Hruška, J.; Adão, T.; Bessa, J.; Sousa, A.; Peres, E.; Morais, R.; Sousa, J.J. Vineyard properties extraction combining UAS-based RGB imagery with elevation data. Int. J. Remote Sens. 2018, 39, 5377–5401. [Google Scholar] [CrossRef]
- Zoto, J.; Musci, M.A.; Khaliq, A.; Chiaberge, M.; Aicardi, I. Automatic path planning for unmanned ground vehicle using uav imagery. In International Conference on Robotics in Alpe-Adria Danube Region; Springer: Cham, Switzerland, 2019; pp. 223–230. [Google Scholar]
- Cogato, A.; Pagay, V.; Marinello, F.; Meggio, F.; Grace, P.; De Antoni Migliorati, M. Assessing the feasibility of using sentinel-2 imagery to quantify the impact of heatwaves on irrigated vineyards. Remote Sens. 2019, 11, 2869. [Google Scholar] [CrossRef] [Green Version]
- Kopačková-Strnadová, V.; Koucká, L.; Jelének, J.; Lhotáková, Z.; Oulehle, F. Canopy top, height and photosynthetic pigment estimation using Parrot Sequoia multispectral imagery and the Unmanned Aerial Vehicle (UAV). Remote Sens. 2021, 13, 705. [Google Scholar] [CrossRef]
- Costa, J.; Egipto, R.; Sánchez-Virosta, A.; Lopes, C.; Chaves, M. Canopy and soil thermal patterns to support water and heat stress management in vineyards. Agric. Water Manag. 2019, 216, 484–496. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Matese, A.; Gioli, B.; Toscano, P.; Zaldei, A.; Palliotti, A.; Genesio, L. Multisensor approach to assess vineyard thermal dynamics combining high-resolution unmanned aerial vehicle (UAV) remote sensing and wireless sensor network (WSN) proximal sensing. Sci. Hortic. 2017, 221, 83–87. [Google Scholar] [CrossRef]
- Soubry, I.; Patias, P.; Tsioukas, V. Monitoring Vineyards with UAV and Multi-sensors for the assessment of Water Stress and Grape Maturity. J. Unmanned Veh. Syst. 2017, 5, 37–50. [Google Scholar] [CrossRef] [Green Version]
- Romero, M.; Luo, Y.; Su, B.; Fuentes, S. Vineyard water status estimation using multispectral imagery from an UAV platform and machine learning algorithms for irrigation scheduling management. Comput. Electron. Agric. 2018, 147, 109–117. [Google Scholar] [CrossRef]
- Poblete, T.; Ortega-Farías, S.; Moreno, M.A.; Bardeen, M. Artificial neural network to predict vine water status spatial variability using multispectral information obtained from an unmanned aerial vehicle (UAV). Sensors 2017, 17, 2488. [Google Scholar] [CrossRef] [Green Version]
- Salam, A. Internet of things in agricultural innovation and security. In Internet of Things for Sustainable Community Development; Springer: Cham, Switzerland, 2020; pp. 71–112. [Google Scholar]
- Puig Sirera, À.; Antichi, D.; Warren Raffa, D.; Rallo, G. Application of Remote Sensing Techniques to Discriminate the Effect of Different Soil Management Treatments over Rainfed Vineyards in Chianti Terroir. Remote Sens. 2021, 13, 716. [Google Scholar] [CrossRef]
- Reynolds, A. The grapevine, viticulture, and winemaking: A brief introduction. In Grapevine Viruses: Molecular Biology, Diagnostics and Management; Springer: Cham, Switzerland, 2017; pp. 3–29. [Google Scholar]
- Weiss, M.; Baret, F. Using 3D point clouds derived from UAV RGB imagery to describe vineyard 3D macro-structure. Remote Sens. 2017, 9, 111. [Google Scholar] [CrossRef] [Green Version]
- Volschenk, C.; Hunter, J. Effect of seasonal canopy management on the performance of Chenin blanc/99 Richter grapevines. S. Afr. J. Enol. Vitic. 2001, 22, 36–40. [Google Scholar] [CrossRef] [Green Version]
- Vance, A.J.; Reeve, A.L.; Skinkis, P. The role of canopy management in vine balance. In Corvallis, or Extension Service; Oregon State University: Corvallis, OR, USA, 2013. [Google Scholar]
- Cruz, A.; Botelho, M.; Silvestre, J.; Castro, R. Soil management: Introduction of tillage in a vineyard with a long-term natural cover. Ciênc. Téc. Vitiviníc. 2012, 27, 27–38. [Google Scholar]
- Abdulridha, J.; Ampatzidis, Y.; Roberts, P.; Kakarla, S.C. Detecting powdery mildew disease in squash at different stages using UAV-based hyperspectral imaging and artificial intelligence. Biosyst. Eng. 2020, 197, 135–148. [Google Scholar] [CrossRef]
- Mirás-Avalos, J.M.; Araujo, E.S. Optimization of Vineyard Water Management: Challenges, Strategies, and Perspectives. Water 2021, 13, 746. [Google Scholar] [CrossRef]
- Páscoa, R.N. In situ visible and near-infrared spectroscopy applied to vineyards as a tool for precision viticulture. In Comprehensive Analytical Chemistry; Elsevier: Amsterdam, The Netherlands, 2018; Volume 80, pp. 253–279. [Google Scholar]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef] [Green Version]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef] [Green Version]
- Honkavaara, E.; Saari, H.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Mäkynen, J.; Pesonen, L. Processing and assessment of spectrometric, stereoscopic imagery collected using a lightweight UAV spectral camera for precision agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef] [Green Version]
- Lelong, C.C.; Burger, P.; Jubelin, G.; Roux, B.; Labbé, S.; Baret, F. Assessment of unmanned aerial vehicles imagery for quantitative monitoring of wheat crop in small plots. Sensors 2008, 8, 3557–3585. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; Pena, J.M.; de Castro, A.I.; López-Granados, F. Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV. Comput. Electron. Agric. 2014, 103, 104–113. [Google Scholar] [CrossRef]
- Baluja, J.; Diago, M.P.; Balda, P.; Zorer, R.; Meggio, F.; Morales, F.; Tardaguila, J. Assessment of vineyard water status variability by thermal and multispectral imagery using an unmanned aerial vehicle (UAV). Irrig. Sci. 2012, 30, 511–522. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Guillén-Climent, M.L.; Hernández-Clemente, R.; Catalina, A.; González, M.; Martín, P. Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric. For. Meteorol. 2013, 171, 281–294. [Google Scholar] [CrossRef] [Green Version]
- Tokekar, P.; Vander Hook, J.; Mulla, D.; Isler, V. Sensor planning for a symbiotic UAV and UGV system for precision agriculture. IEEE Trans. Robot. 2016, 32, 1498–1511. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Williams, L.; Suarez, L.; Berni, J.A.; Goldhamer, D.; Fereres, E. A PRI-based water stress index combining structural and chlorophyll effects: Assessment using diurnal narrow-band airborne imagery and the CWSI thermal index. Remote Sens. Environ. 2013, 138, 38–50. [Google Scholar] [CrossRef]
- Mathews, A.J.; Jensen, J.L. Visualizing and quantifying vineyard canopy LAI using an unmanned aerial vehicle (UAV) collected high density structure from motion point cloud. Remote Sens. 2013, 5, 2164–2183. [Google Scholar] [CrossRef] [Green Version]
- Santesteban, L.; Di Gennaro, S.; Herrero-Langreo, A.; Miranda, C.; Royo, J.; Matese, A. High-resolution UAV-based thermal imaging to estimate the instantaneous and seasonal variability of plant water status within a vineyard. Agric. Water Manag. 2017, 183, 49–59. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Catalina, A.; González, M.; Martín, P. Relationships between net photosynthesis and steady-state chlorophyll fluorescence retrieved from airborne hyperspectral imagery. Remote Sens. Environ. 2013, 136, 247–258. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Di Gennaro, S.F. Technology in precision viticulture: A state of the art review. Int. J. Wine Res. 2015, 7, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Aquino, A.; Millan, B.; Diago, M.P.; Tardaguila, J. Automated early yield prediction in vineyards from on-the-go image acquisition. Comput. Electron. Agric. 2018, 144, 26–36. [Google Scholar] [CrossRef]
- Matese, A.; Baraldi, R.; Berton, A.; Cesaraccio, C.; Di Gennaro, S.F.; Duce, P.; Facini, O.; Mameli, M.G.; Piga, A.; Zaldei, A. Estimation of water stress in grapevines using proximal and remote sensing methods. Remote Sens. 2018, 10, 114. [Google Scholar] [CrossRef] [Green Version]
- Hacking, C.; Poona, N.; Manzan, N.; Poblete-Echeverría, C. Investigating 2-D and 3-D proximal remote sensing techniques for vineyard yield estimation. Sensors 2019, 19, 3652. [Google Scholar] [CrossRef] [Green Version]
- Jiménez-Brenes, F.M.; López-Granados, F.; Torres-Sánchez, J.; Peña, J.M.; Ramírez, P.; Castillejo-González, I.L.; de Castro, A.I. Automatic UAV-based detection of Cynodon dactylon for site-specific vineyard management. PLoS ONE 2019, 14, e0218132. [Google Scholar] [CrossRef]
- de Castro, A.I.; Peña, J.M.; Torres-Sánchez, J.; Jiménez-Brenes, F.M.; Valencia-Gredilla, F.; Recasens, J.; López-Granados, F. Mapping cynodon dactylon infesting cover crops with an automatic decision tree-OBIA procedure and UAV imagery for precision viticulture. Remote Sens. 2020, 12, 56. [Google Scholar] [CrossRef] [Green Version]
- Kerkech, M.; Hafiane, A.; Canals, R. Deep leaning approach with colorimetric spaces and vegetation indices for vine diseases detection in UAV images. Comput. Electron. Agric. 2018, 155, 237–243. [Google Scholar] [CrossRef]
- Chen, A.; Orlov-Levin, V.; Meron, M. Applying high-resolution visible-channel aerial scan of crop canopy to precision irrigation management. Multidiscip. Digit. Publ. Inst. Proc. 2018, 2, 335. [Google Scholar]
- Motohka, T.; Nasahara, K.N.; Oguma, H.; Tsuchida, S. Applicability of green-red vegetation index for remote sensing of vegetation phenology. Remote Sens. 2010, 2, 2369–2387. [Google Scholar] [CrossRef] [Green Version]
- Caruso, G.; Tozzini, L.; Rallo, G.; Primicerio, J.; Moriondo, M.; Palai, G.; Gucci, R. Estimating biophysical and geometrical parameters of grapevine canopies (‘Sangiovese’) by an unmanned aerial vehicle (UAV) and VIS-NIR cameras. Vitis 2017, 56, 63–70. [Google Scholar]
- Torres-Sánchez, J.; Mesas-Carrascosa, F.J.; Santesteban, L.G.; Jiménez-Brenes, F.M.; Oneka, O.; Villa-Llop, A.; Loidi, M.; López-Granados, F. Grape Cluster Detection Using UAV Photogrammetric Point Clouds as a Low-Cost Tool for Yield Forecasting in Vineyards. Sensors 2021, 21, 3083. [Google Scholar] [CrossRef]
- Di Gennaro, S.; Toscano, P.; Cinat, P.; Berton, A.; Matese, A. A precision viticulture UAV-based approach for early yield prediction in vineyard. In Precision Agriculture’19; Wageningen Academic Publishers: Wageningen, The Netherlands, 2019; pp. 370–378. [Google Scholar]
- Ballesteros, R.; Intrigliolo, D.S.; Ortega, J.F.; Ramírez-Cuesta, J.M.; Buesa, I.; Moreno, M.A. Vineyard yield estimation by combining remote sensing, computer vision and artificial neural network techniques. Precis. Agric. 2020, 21, 1242–1262. [Google Scholar] [CrossRef]
- Hunt Jr, E.R.; Daughtry, C.S. What good are unmanned aircraft systems for agricultural remote sensing and precision agriculture? Int. J. Remote Sens. 2018, 39, 5345–5376. [Google Scholar] [CrossRef] [Green Version]
- de Oca, A.M.; Flores, G. The AgriQ: A low-cost unmanned aerial system for precision agriculture. Expert Syst. Appl. 2021, 182, 115163. [Google Scholar] [CrossRef]
- Ardupilot. Planning a Mission with Waypoints and Events. 2020. Available online: http://ardupilot.org/copter/docs/common-planning-a-mission-with-waypoints-and-events.html (accessed on 12 March 2022).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Database | Scopus |
|---|---|
| Topic for PA | ‘Precision Agriculture’ and ‘UAV’, ‘Precision Agriculture’ and ‘UAS’ |
| Topic for PV | ‘Precision Viticulture’ and ‘UAV’, ‘Precision Viticulture’ and ‘UAS’, ‘Vineyard’ and ‘UAV’, ‘Vineyard’ and ‘UAS’ |
| Number of relevant documents considered in PA | 1084 |
| Number of relevant documents considered in PV | 182 |
| Time-span | 1 January 2006–15 November 2021 |
| Criteria for inclusion | Title, abstract, and keywords should contain search terms. Only English documents. |
| Bibliometric software | SciMAT and VOSviewer |
| Article Title | Author Details | Journal Name | Year | Citation Count |
|---|---|---|---|---|
| Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging [118] | Bendig J., Bolten A., Bennertz S., Broscheit J., Eichfuss S., Bareth G. | Remote Sensing | 2014 | 371 |
| Evaluating multispectral images and vegetation indices for precision farming applications from UAV images [119] | Candiago S., Remondino F., De Giglio M., Dubbini M., Gattelli M. | Remote Sensing | 2015 | 335 |
| Processing and assessment of spectrometric, stereoscopic imagery collected using a lightweight UAV spectral camera for precision agriculture [120] | Honkavaara E., Saari H., Kaivosoja J., Pölönen I., Hakala T., Litkey P., Mäkynen J., Pesonen L. | Remote Sensing | 2013 | 334 |
| Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture [36] | Matese A., Toscano P., Di Gennaro S.F., Genesio L., Vaccari F.P., Primicerio J., Belli C., Zaldei A., Bianconi R., Gioli B. | Remote Sensing | 2015 | 312 |
| UAVs challenge to assess water stress for sustainable agriculture [73] | Gago J., Douthe C., Coopman R.E., Gallego P.P., Ribas-Carbo M., Flexas J., Escalona J., Medrano H. | Agricultural Water Management | 2015 | 281 |
| Assessment of unmanned aerial vehicles imagery for quantitative monitoring of wheat crop in small plots [121] | Lelong C.C.D., Burger P., Jubelin G., Roux B., Labbé S., Baret F. | Sensors | 2008 | 278 |
| Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance [91] | Aasen H., Burkart A., Bolten A., Bareth G. | ISPRS Journal of Photogrammetry and Remote Sensing | 2015 | 273 |
| Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV [122] | Torres-Sánchez J., Peña J.M., de Castro A.I., López-Granados F. | Computers and Electronics in Agriculture | 2014 | 267 |
| Assessment of vineyard water status variability by thermal and multispectral imagery using an unmanned aerial vehicle (UAV) [123] | Baluja J., Diago M.P., Balda P., Zorer R., Meggio F., Morales F., Tardaguila J. | Irrigation Science | 2012 | 250 |
| Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV) [124] | Zarco-Tejada P.J., Guillén-Climent M.L., Hernández-Clemente R., Catalina A., González M.R., Martín P. | Agricultural and Forest Meteorology | 2013 | 198 |
| Sensor Planning for a Symbiotic UAV and UGV System for Precision Agriculture [125] | Tokekar P., Hook J.V., Mulla D., Isler V. | IEEE Transactions on Robotics | 2016 | 197 |
| Rank | Journal Name | Documents | h-Index |
|---|---|---|---|
| 1 | Remote Sensing | 111 | 124 |
| 2 | Computers and Electronics in Agriculture | 33 | 115 |
| 3 | Nongye Gongcheng Xuebao Transactions of the Chinese Society of Agricultural Engineering | 30 | 51 |
| 4 | Sensors | 27 | 172 |
| 5 | Precision Agriculture | 23 | 63 |
| 6 | Nongye Jixie Xuebo Transactions of the Chinese Society for Agricultural Machinery | 15 | 42 |
| 7 | ISPRS Journal of Photogrammetry and Remote Sensing | 13 | 138 |
| 8 | IEEE Access | 13 | 127 |
| 9 | Agronomy | 13 | 30 |
| 10 | Drones | 10 | 18 |
| Article Title | Author Details | Journal Name | Year | Citation Count |
|---|---|---|---|---|
| Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture [36] | Matese A., Toscano P., Di Gennaro S.F., Genesio L., Vaccari F.P., Primicerio J., Belli C., Zaldei A., Bianconi R., Gioli B. | Remote Sensing | 2015 | 312 |
| Assessment of vineyard water status variability by thermal and multispectral imagery using an unmanned aerial vehicle (UAV) [123] | Baluja J., Diago M.P., Balda P., Zorer R., Meggio F., Morales F., Tardaguila J. | Irrigation Science | 2012 | 250 |
| Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV) [124] | Zarco-Tejada P.J., Guillén-Climent M.L., Hernández-Clemente R., Catalina A., González M.R., Martín P. | Agricultural and Forest Meteorology | 2013 | 198 |
| A PRI-based water stress index combining structural and chlorophyll effects: Assessment using diurnal narrow-band airborne imagery and the CWSI thermal index [126] | Zarco-Tejada P.J., González-Dugo V., Williams L.E., Suárez L., Berni J.A.J., Goldhamer D., Fereres E. | Remote Sensing of Environment | 2013 | 173 |
| Visualizing and quantifying vineyard canopy LAI using an unmanned aerial vehicle (UAV) collected high density structure from motion point cloud [127] | Mathews A.J., Jensen J.L.R. | Remote Sensing | 2013 | 160 |
| High-resolution UAV-based thermal imaging to estimate the instantaneous and seasonal variability of plant water status within a vineyard [128] | Santesteban L.G., Di Gennaro S.F., Herrero-Langreo A., Miranda C., Royo J.B., Matese A. | Agricultural Water Management | 2017 | 124 |
| Relationships between net photosynthesis and steady-state chlorophyll fluorescence retrieved from airborne hyperspectral imagery [129] | Zarco-Tejada P.J., Catalina A., González M.R., Martín P. | Remote Sensing of Environment | 2013 | 105 |
| Detection of Flavescence dorée grapevine disease using Unmanned Aerial Vehicle (UAV) multispectral imagery [57] | Albetis J., Duthoit S., Guttler F., Jacquin A., Goulard M., Poilvé H., Féret J.-B., Dedieu G. | Remote Sensing | 2017 | 84 |
| A novel methodology for improving plant pest surveillance in vineyards and crops using UAV-based hyperspectral and spatial data [95] | Vanegas F., Bratanov D., Powell K., Weiss J., Gonzalez F. | Sensors | 2018 | 81 |
| Rank | Journal Name | Documents | h-index |
|---|---|---|---|
| 1 | Remote Sensing | 29 | 124 |
| 2 | Acta Horticulturae | 9 | 58 |
| 3 | Computers and Electronics in Agriculture | 7 | 115 |
| 4 | Precision Agriculture | 4 | 63 |
| 5 | Sensors | 4 | 172 |
| Institutions Working on Adopting UAV-PA | Citations | Institutions Working on Adopting UAV-PV | Citations |
|---|---|---|---|
| Instituto de Agricultura Sostenible—CSIC, Spain | 2227 | Consiglio Nazionale delle Ricerche, Italy | 942 |
| Universidad de Córdoba, Spain | 765 | Instituto de Agricultura Sostenible—CSIC, Spain | 916 |
| Consiglio Nazionale delle Ricerche, Italy | 631 | Istituto Di Biometeorologia, Florence, Italy | 803 |
| China Agricultural University, China | 565 | Università degli Studi di Torino, Italy | 685 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, A.P.; Yerudkar, A.; Mariani, V.; Iannelli, L.; Glielmo, L. A Bibliometric Review of the Use of Unmanned Aerial Vehicles in Precision Agriculture and Precision Viticulture for Sensing Applications. Remote Sens. 2022, 14, 1604. https://doi.org/10.3390/rs14071604
Singh AP, Yerudkar A, Mariani V, Iannelli L, Glielmo L. A Bibliometric Review of the Use of Unmanned Aerial Vehicles in Precision Agriculture and Precision Viticulture for Sensing Applications. Remote Sensing. 2022; 14(7):1604. https://doi.org/10.3390/rs14071604
Chicago/Turabian StyleSingh, Abhaya Pal, Amol Yerudkar, Valerio Mariani, Luigi Iannelli, and Luigi Glielmo. 2022. "A Bibliometric Review of the Use of Unmanned Aerial Vehicles in Precision Agriculture and Precision Viticulture for Sensing Applications" Remote Sensing 14, no. 7: 1604. https://doi.org/10.3390/rs14071604
APA StyleSingh, A. P., Yerudkar, A., Mariani, V., Iannelli, L., & Glielmo, L. (2022). A Bibliometric Review of the Use of Unmanned Aerial Vehicles in Precision Agriculture and Precision Viticulture for Sensing Applications. Remote Sensing, 14(7), 1604. https://doi.org/10.3390/rs14071604