
Multi-Target Localization of MIMO Radar with Widely Separated Antennas on Moving Platforms Based on Expectation Maximization Algorithm



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Signal Model
2.2. Stage 1: Delay-Doppler-SNR Estimation
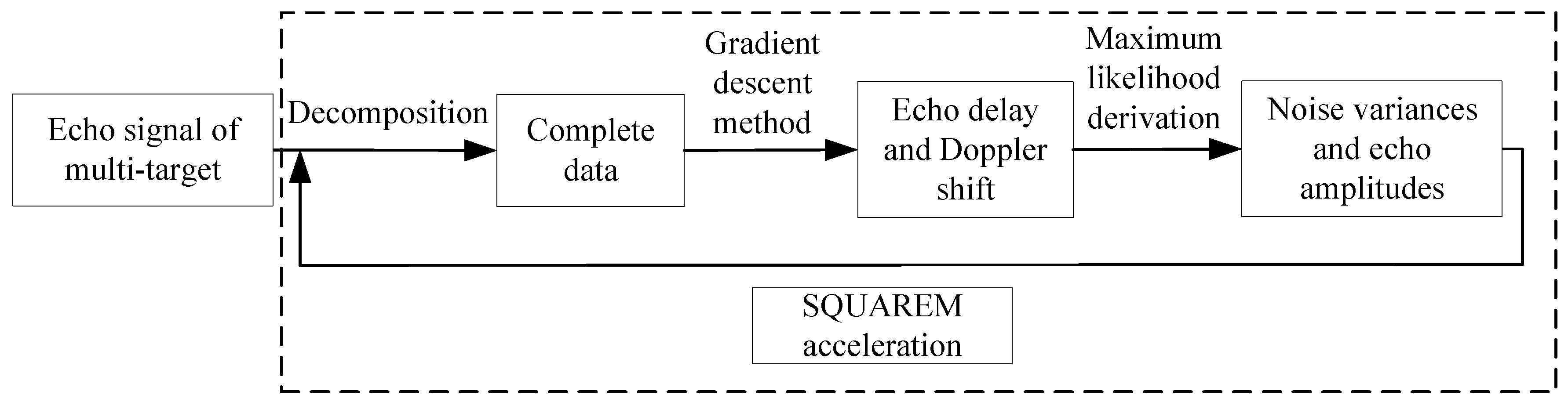
2.2.1. Q function and Derivation of Complete Data
2.2.2. Estimation of Parameters in SNR
2.2.3. Echo Delay and Doppler Shift Estimation
| Algorithm 1 GAEM algorithm |
Input:
Output:
|
| Algorithm 2 GAEM+SQUAREM algorithm |
Input:
Output:
|
2.3. Stage 2: Target Parameters and System Deviations Estimation
2.4. Cramér-Rao Bound in the Non-Ideal Environment
3. Results
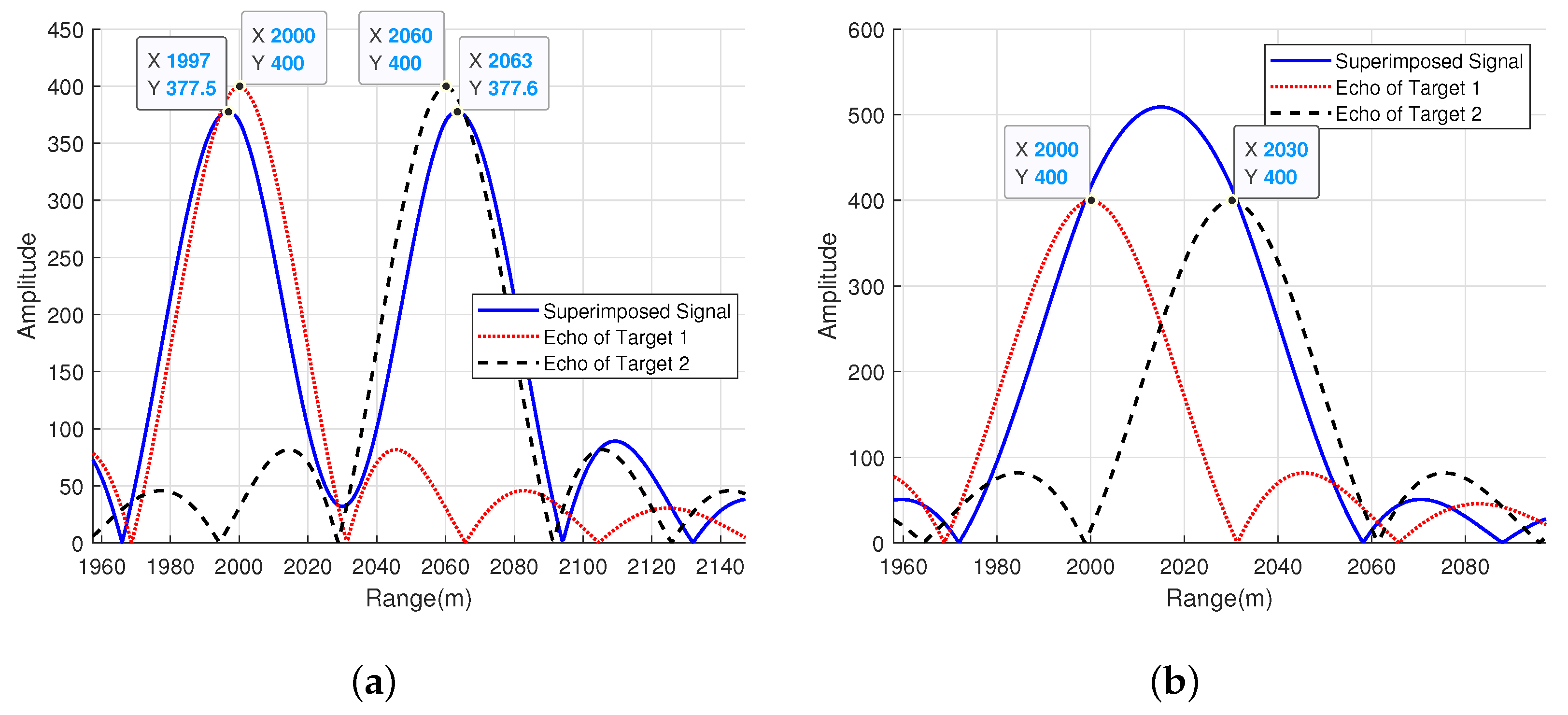
3.1. Estimation of Time Delay and Doppler
3.2. Target Parameters and System Deviations Estimation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Derivation of the Fisher Information Matrix
References
- Ward, J. Space-Time Adaptive Processing for Airborne Radar; Number TR-1015; MIT Lincoln Laboratory: Lexington, MA, USA, 1994. [Google Scholar]
- Chen, C.Y.; Vaidyanathan, P.P. MIMO Radar Space–Time Adaptive Processing Using Prolate Spheroidal Wave Functions. IEEE Trans. Signal Process. 2008, 56, 623–635. [Google Scholar] [CrossRef]
- Cuomo, K.M.; Coutts, S.D.; McHarg, J.C.; Pulsone, N.B.; Robey, F.C. Wideband Aperture Coherence Processing for Next Generation Radar (NexGen); Number ESC-TR-2004-087; MIT Lincoln Laboratory: Lexington, MA, USA, 2004. [Google Scholar]
- Zheng, H.; Jiu, B.; Li, K.; Liu, H. Joint Design of the Transmit Beampattern and Angular Waveform for Colocated MIMO Radar under a Constant Modulus Constraint. Remote Sens. 2021, 13, 3392. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO Radar Signal Processing; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO Radar with Widely Separated Antennas. IEEE Signal Process. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Lehmann, N.H.; Haimovich, A.M.; Blum, R.S.; Cimini, L. High Resolution Capabilities of MIMO Radar. In Proceedings of the 2006 Fortieth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 29 October–1 November 2006; pp. 25–30. [Google Scholar]
- Li, H.; Wang, Z.; Liu, J.; Himed, B. Moving Target Detection in Distributed MIMO Radar on Moving Platforms. IEEE J. Sel. Top. Signal Process. 2015, 9, 1524–1535. [Google Scholar] [CrossRef]
- Chen, P.; Zheng, L.; Wang, X.; Li, H.; Wu, L. Moving Target Detection Using Colocated MIMO Radar on Multiple Distributed Moving Platforms. IEEE Trans. Signal Process. 2017, 65, 4670–4683. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S.; Godrich, H.; Haimovich, A.M. Target Velocity Estimation and Antenna Placement for MIMO Radar With Widely Separated Antennas. IEEE J. Sel. Top. Signal Process. 2010, 4, 79–100. [Google Scholar] [CrossRef]
- Mitra, A.K. Position-adaptive UAV radar for urban environments. In Proceedings of the International Conference on Radar, Adelaide, SA, Australia, 3–5 September 2003; pp. 303–308. [Google Scholar] [CrossRef]
- Godrich, H.; Haimovich, A.M.; Blum, R.S. Target localisation techniques and tools for multiple-input multiple-output radar. IET Radar Sonar Navig. 2009, 3, 314–327. [Google Scholar] [CrossRef]
- He, Q.; Blum, R.S. Cramer–Rao Bound for MIMO Radar Target Localization With Phase Errors. IEEE Signal Process. Lett. 2010, 17, 83–86. [Google Scholar]
- Lu, J.; Liu, F.; Liu, H.; Liu, Q. Target Localization Based on High Resolution Mode of MIMO Radar with Widely Separated Antennas. Remote Sens. 2022, 14, 902. [Google Scholar] [CrossRef]
- Feder, M.; Weinstein, E. Parameter estimation of superimposed signals using the EM algorithm. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 477–489. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Zhang, Z.; Yu, W. Direction of arrival estimation for the uniform or non-uniform noise with adaptive expectation maximisation algorithm. IET Radar Sonar Navig. 2020, 14, 1029–1038. [Google Scholar] [CrossRef]
- Lu, L.; Wu, H.C. Robust Expectation–Maximization Direction-of-Arrival Estimation Algorithm for Wideband Source Signals. IEEE Trans. Veh. Technol. 2011, 60, 2395–2400. [Google Scholar] [CrossRef]
- Lu, L.; Wu, H.C. Novel Robust Direction-of-Arrival-Based Source Localization Algorithm for Wideband Signals. IEEE Trans. Wirel. Commun. 2012, 11, 3850–3859. [Google Scholar] [CrossRef]
- Mada, K.K.; Wu, H.C.; Iyengar, S.S. Efficient and Robust EM Algorithm for Multiple Wideband Source Localization. IEEE Trans. Veh. Technol. 2009, 58, 3071–3075. [Google Scholar] [CrossRef]
- Frenkel, L.; Feder, M. Recursive expectation-maximization (EM) algorithms for time-varying parameters with applications to multiple target tracking. IEEE Trans. Signal Process. 1999, 47, 306–320. [Google Scholar] [CrossRef]
- Chung, P.J.; Roberts, W.; Bohme, J. Recursive K-distribution parameter estimation. IEEE Trans. Signal Process. 2005, 53, 397–402. [Google Scholar] [CrossRef]
- Chung, P.J.; Bohme, J. Comparative convergence analysis of EM and SAGE algorithms in DOA estimation. IEEE Trans. Signal Process. 2001, 49, 2940–2949. [Google Scholar] [CrossRef]
- Chung, P.J.; Bohme, J. Recursive EM and SAGE-inspired algorithms with application to DOA estimation. IEEE Trans. Signal Process. 2005, 53, 2664–2677. [Google Scholar] [CrossRef]
- Varadhan, R.; Roland, C. Simple and Globally Convergent Methods for Accelerating the Convergence of Any EM Algorithm. Scand. J. Stat. 2007, 35, 335–353. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Ding, Z. Multi-Target Position and Velocity Estimation Using OFDM Communication Signals. IEEE Trans. Commun. 2020, 68, 1160–1174. [Google Scholar] [CrossRef]
- Liang, J.; Leung, C.S.; So, H.C. Lagrange Programming Neural Network Approach for Target Localization in Distributed MIMO Radar. IEEE Trans. Signal Process. 2016, 64, 1574–1585. [Google Scholar] [CrossRef]
- Yang, X.; Li, Y.; Sun, Y.; Long, T.; Sarkar, T.K. Fast and Robust RBF Neural Network Based on Global K-Means Clustering With Adaptive Selection Radius for Sound Source Angle Estimation. IEEE Trans. Antennas Propag. 2018, 66, 3097–3107. [Google Scholar] [CrossRef]
- Ho, K.; Xu, W. An accurate algebraic solution for moving source location using TDOA and FDOA measurements. IEEE Trans. Signal Process. 2004, 52, 2453–2463. [Google Scholar] [CrossRef]
- Ho, K.C.; Lu, X.; Kovavisaruch, L. Source Localization Using TDOA and FDOA Measurements in the Presence of Receiver Location Errors: Analysis and Solution. IEEE Trans. Signal Process. 2007, 55, 684–696. [Google Scholar] [CrossRef]
- Liu, Y.; Liao, G.; Li, H.; Zhu, S.; Li, Y.; Yin, Y. Passive MIMO Radar Detection with Unknown Colored Gaussian Noise. Remote Sens. 2021, 13, 2708. [Google Scholar] [CrossRef]
- Trees, H.L.V. Detection, Estimation, and Modulation Theory I; Prentice Hall: Hoboken, NJ, USA, 2001. [Google Scholar]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall: Hoboken, NJ, USA, 1993. [Google Scholar]
- Stoica, P.; Simonyte, V.; Soderstrom, T. On the resolution performance of spectral analysis. Signal Process 1995, 44, 153–161. [Google Scholar] [CrossRef]
- Chen, J.; Hudson, R.; Yao, K. Maximum-likelihood source localization and unknown sensor location estimation for wideband signals in the near-field. IEEE Trans. Signal Process. 2002, 50, 1843–1854. [Google Scholar] [CrossRef] [Green Version]
- Schultheiss, P.; Weinstein, E. Lower bounds on the localization errors of a moving source observed by a passive array. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 600–607. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Liu, F.; Sun, J.; Miao, Y.; Liu, Q. Multi-Target Localization of MIMO Radar with Widely Separated Antennas on Moving Platforms Based on Expectation Maximization Algorithm. Remote Sens. 2022, 14, 1670. https://doi.org/10.3390/rs14071670
Lu J, Liu F, Sun J, Miao Y, Liu Q. Multi-Target Localization of MIMO Radar with Widely Separated Antennas on Moving Platforms Based on Expectation Maximization Algorithm. Remote Sensing. 2022; 14(7):1670. https://doi.org/10.3390/rs14071670
Chicago/Turabian StyleLu, Jiaxin, Feifeng Liu, Jingyi Sun, Yingjie Miao, and Quanhua Liu. 2022. "Multi-Target Localization of MIMO Radar with Widely Separated Antennas on Moving Platforms Based on Expectation Maximization Algorithm" Remote Sensing 14, no. 7: 1670. https://doi.org/10.3390/rs14071670
APA StyleLu, J., Liu, F., Sun, J., Miao, Y., & Liu, Q. (2022). Multi-Target Localization of MIMO Radar with Widely Separated Antennas on Moving Platforms Based on Expectation Maximization Algorithm. Remote Sensing, 14(7), 1670. https://doi.org/10.3390/rs14071670