This section will present detailed algorithms and the integration mechanism of the proposed method. First, we give two basic algorithms. Then, the detailed integration mechanism is described and the effect of data broadcast rate and sampling rate is discussed. Finally, two extended algorithms are presented which ensure the high output rate, accuracy and reliability of the proposed relative positioning solution.
2.1. RTK DGNSS Relative Positioning Algorithm
As ionospheric and tropospheric errors are highly correlated for a short baseline (<10 km) between the rover and moving base, double-differences (DD) carrier phase observations between satellites and receivers are typically used to remove receiver clock error, satellite clock error, ionospheric delay, tropospheric delay, and other common errors. The DD carrier phase observation equation for a receiver-satellite pair is as follows:
where
denotes the carrier phase observation,
d denotes the satellite-receiver range,
denotes the signal wavelength,
denotes carrier phase ambiguity and
denotes measuring error. DD operator is expressed as
where subscript
and
represent the rover and moving base, and superscript
and
represent satellite numbers. Assuming that the change of the line-of-sight vectors between receivers can be ignored, the linearized observation equation can be expressed as
where
denotes the line-of-sight vectors and
denotes the baseline vectors to be solved, namely, the relative position between the rover and moving base, while
denotes the comprehensive error after linearization. The ambiguity can be determined by the LAMBDA method [
31] with DD carrier phase and DD pseudo-range observations, and can then be moved to the left of Equation (3). Given the presence of at least four visible satellites between the rover and the moving base, relative position
can be determined by least square estimation (LSE).
2.2. TC-GNSS/INS Integration Algorithm
Instead of the derived GNSS position/velocity, as used in loosely-coupled (LC) integration, TC integration directly utilizes raw GNSS observations and can still provide positioning solutions, even when less than four GNSS satellites are tracked. Conventional TC adopts pseudo-range and Doppler observations for state estimations (TC-PD), which are simple and applicable in cases involving a single receiver. In order to improve the accuracy of the position increment, we use carrier phase and pseudo-range observations in the measurement model (TC-PC). The state vector includes nine navigation error states and six sensor bias states, expressed as
where subscript
denotes the epoch of measurement update;
,
, and
are the position, velocity, and attitude error vectors respectively; and
and
are the bias errors for the accelerometers and gyros, modeled as first-order Gauss–Markov processes. The used raw GNSS observations of satellite
are
where
denotes the number of reference satellites,
denotes single-differenced (SD) pseudo-range observations between satellites at epoch
, and
denotes single-differenced carrier phase observations between satellites at epoch
. The SD operator between satellites is expressed as
denotes the time difference operator, expressed as
The first-order Gauss-Markov processes can be expressed as
where
and
denote the respective correlation times and
and
denote the respective driven noise for accelerometers and gyros. These parameters can be obtained by Allan variance analysis of inertial sensors.
As for carrier phase, time difference is usedto remove the ambiguity parameter. As for the pseudo-range observation, ionospheric delay is compensated for by using the dual-frequency ionosphere-free combination [
26], and the tropospheric delay is mostly corrected by the Saastamoinen model [
32]. Assuming the total number of the used GNSS observations is
, the observation matrix is
Then, a linearized time update and measurement update model can be expressed as
where
denotes state transition matrix,
is the process noise matrix,
is the design matrix, and
is the measurement noise matrix. Then, the state vector
and its corresponding covariance matrix
can be solved using the Kalman filter algorithm. After the measurement update, the state vector is calculated by a time update using only INS measurements. We define this period as coasting time. Assuming that the coasting time is
, the state vector increment
and its corresponding covariance matrix
from
to
can be calculated as
where
denotes the covariance matrix at
. Then, position increment
and its corresponding covariance matrix can be extracted from
and
.
2.3. Integration Mechanism of High-Rate Synchronous Relative Positions
A carrier-phase-based RTK DGNSS relative positioning algorithm is integrated with the carrier-phase-based TC-GNSS/INS integration algorithm to provide high-rate, precise, relative position solutions.
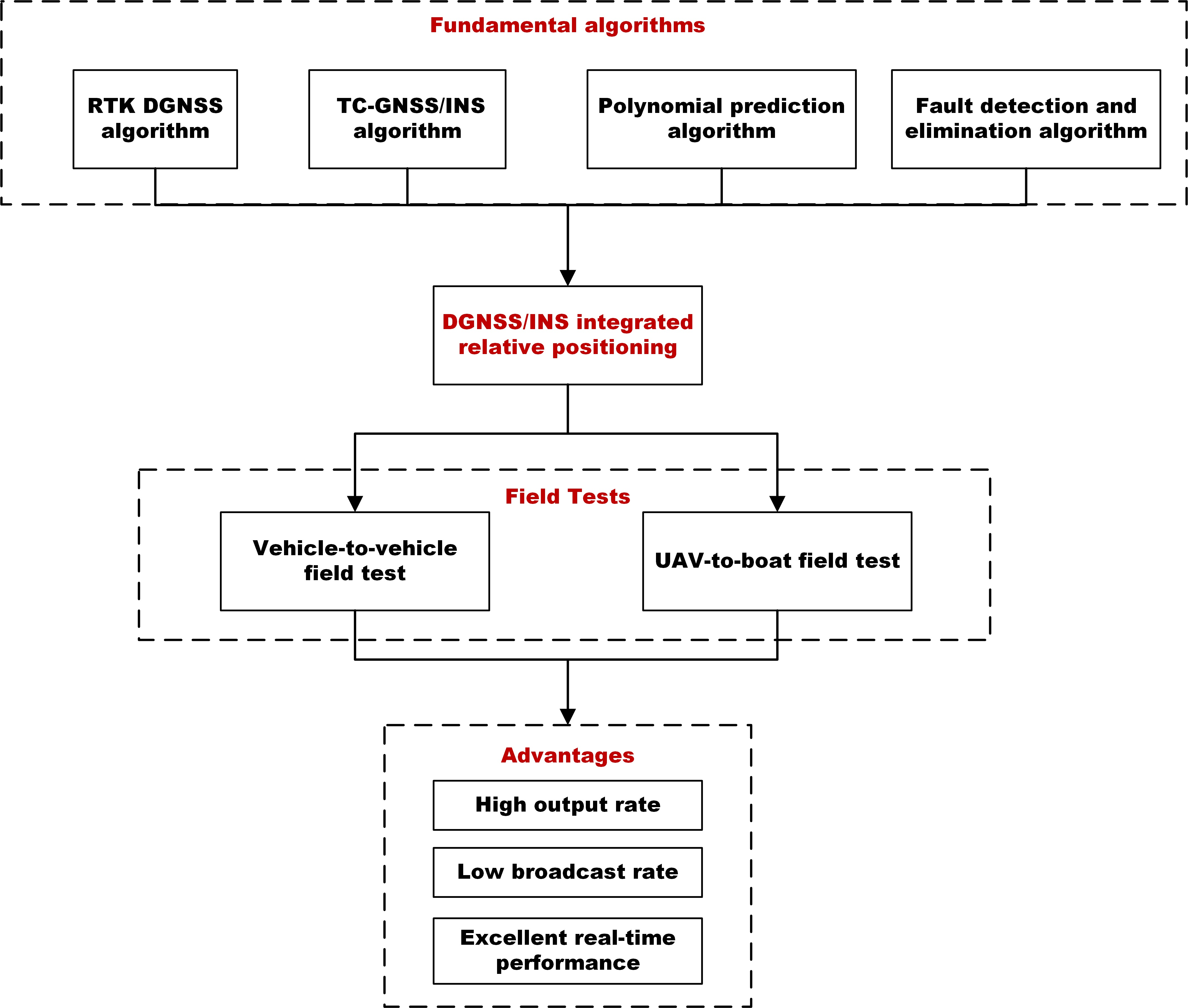
Figure 1 displays the overall architecture of the DGNSS/INS integration relative positioning system, which is composed of four parts, i.e., the rover system, a moving base system, GNSS and datalink.
denotes accelerometer measurements,
denotes gyroscope measurements,
denotes pseudo-range observations and
denotes carrier phase observations. GNSS satellite signals are received synchronously by the GNSS receivers of rover and moving base systems. As for moving base system, carrier phase and pseudo-range observations from GNSS receivers are integrated with the INS measurements from the inertial measurement units (IMUs) in the TC-GNSS/INS integration algorithm to provide the absolute position of the moving base and position increments for the radio station to broadcast. Then, raw GNSS observations and position increments of the moving base are sent to the rover system by wireless datalink. As for the rover system, the RTK DGNSS relative positioning algorithm and TC-GNSS/INS integration algorithm are independent from one another. When no data are being broadcast from the moving base, the TC-GNSS/INS integration algorithm can provide the absolute position of the rover independently. When raw GNSS observations of the moving base are received by the radio station of the rover, the carrier phase and pseudo-range observations of the two receivers are used to construct double-differenced observations between satellites and receivers to calculate the relative distance between the rover and moving base via the RTK DGNSS relative positioning algorithm. When position increments from the moving base are received by the radio station of the rover, the position increments of the rover and moving base and the relative position from RTK DGNSS are merged to obtain the instantaneous synchronous relative position by the integration method. Additionally, single- and dual-station fault detection and elimination (FDE) are carried out before GNSS observations are processed in the positioning algorithms to guarantee the reliability of the solution. The word “single-station” means that the data used for FDE can only be obtained from the GNSS receiver and IMU of a single station, while “dual-station” means that the data from the datalink can also be used. The results of a single-station FDE will be used in the dual-station FDE process inrover.
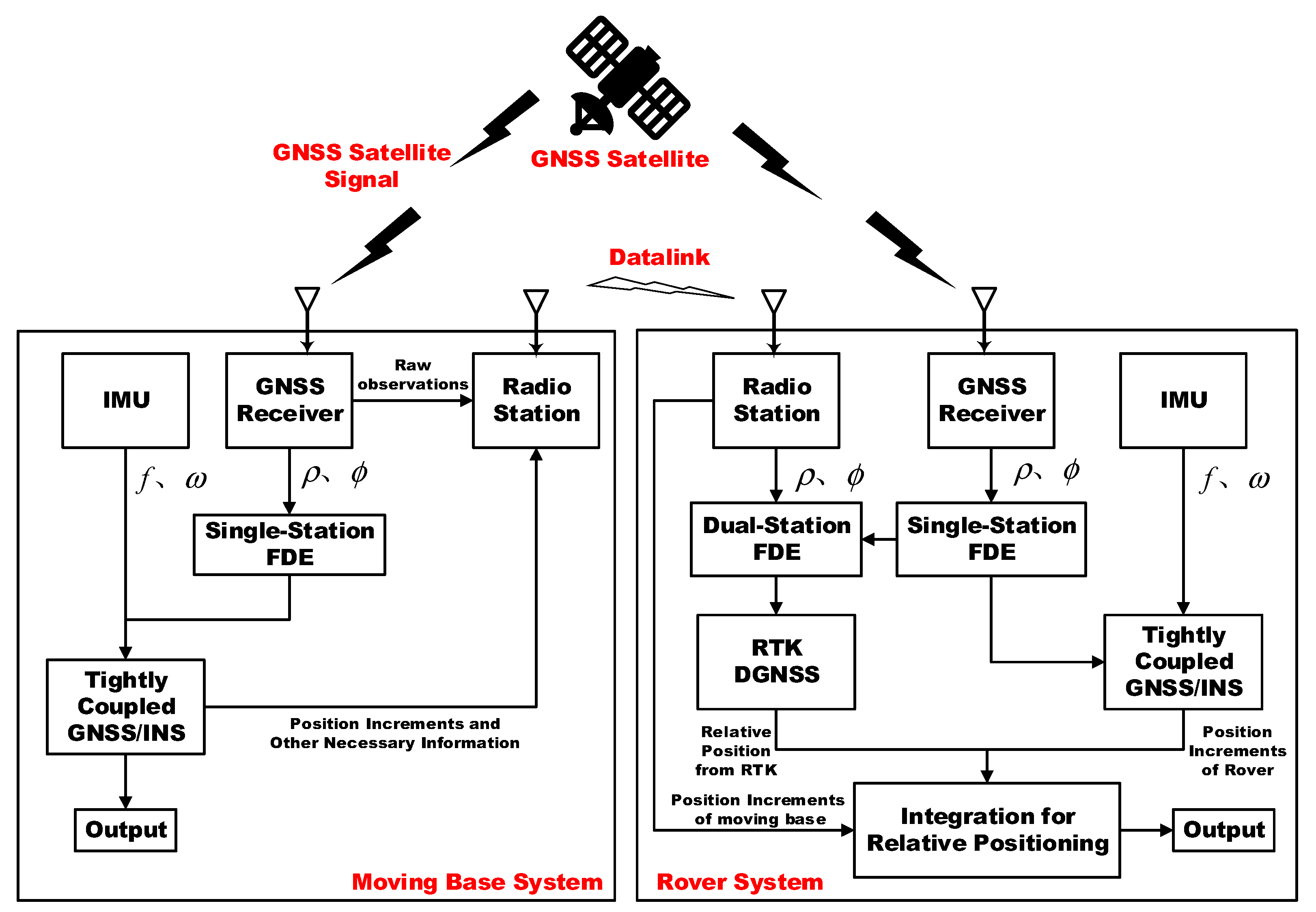
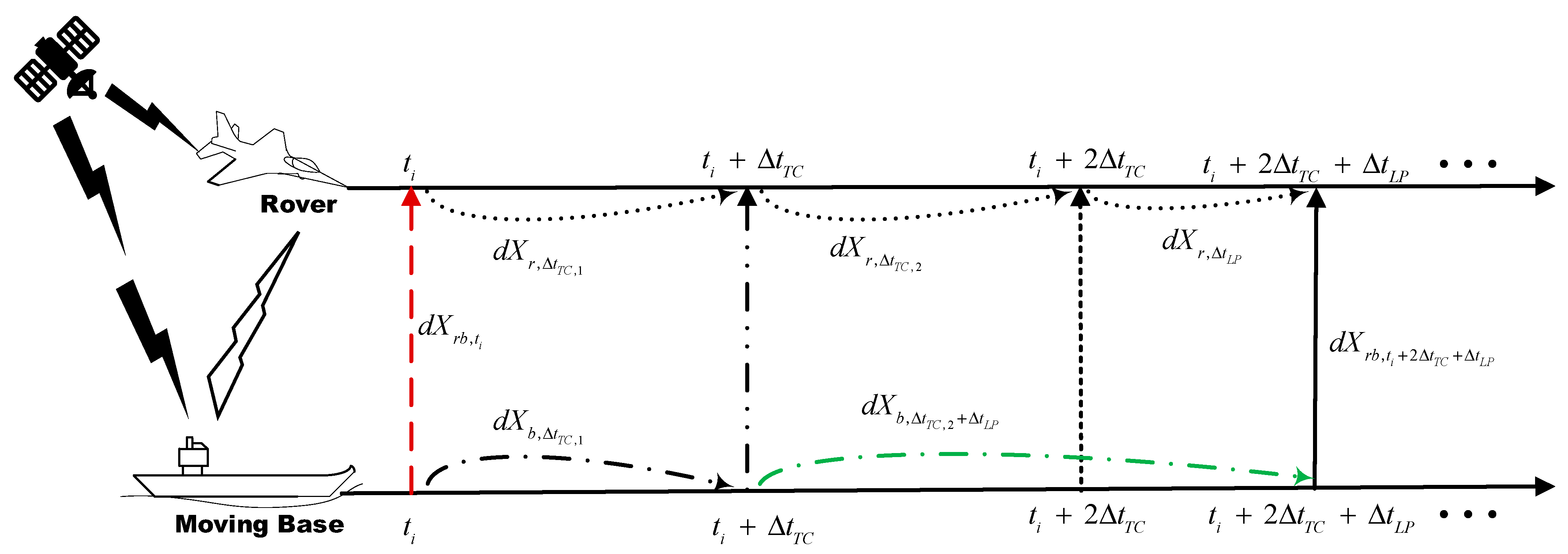
The integration mechanism of the synchronous relative position is displayed in
Figure 2. In the figure, the horizontal axis with arrows denotes the observation time axis;
and
denote the first and
i-th observation times, respectively, when the RTK DGNSS relative positioning succeeds;
denotes the time interval for predictions of position increments of the moving base;
denotes the time interval of measurement updates in the TC-GNSS/INS integration algorithm, which is assumed to be the same value in the rover and the moving base. Once RTK DGNSS relative positioning succeeds at
and
, precise baseline vectors
and
between the rover and moving base can be obtained, represented by red dashed vertical arrows in
Figure 2. Position increments from
to
can be calculated and saved in a buffer in the rover and moving base independently at
, which are denoted as
and
, represented by black curved dotted arrows in
Figure 2. Then, position increments of the moving base, namely
, are broadcast to the rover. Assuming that the current observation time is
, when the nearest RTK DGNSS relative positioning succeeding time is
and the time of the latest position increments received from the moving base is
, the integrated synchronous relative position can be expressed as
where
denotes the integrated synchronous relative position at
, which is represented by solid arrows in
Figure 2;
denotes the position increment of the rover from
to
, which can be obtained from the TC-GNSS/INS integration algorithm of the rover;
denotes the predicted position increment of the moving base from
to
by the polynomial prediction algorithm based on historic broadcasted position increments in a sliding window.
The RTK DGNSS relative positioning solutions and position increments of the rover and moving base are saved in a buffer to allow the integration of synchronous relative position. Assuming that RTK DGNSS relative positioning succeeds, the integration of synchronous relative position, as in Equation (13), can occur. As the position increments of the moving base can be predicted by the polynomial prediction algorithm during data outages from the rover system, the synchronous relative position can be integrated using Equation (13) at an ultra-high rate, i.e., the same as the output rate of the TC-GNSS/INS integration algorithm of the rover.
Broadcast latency of communication packets is a common problem in real-time relative positioning. The proposed navigation architecture solves this problem.
Figure 3 shows the synchronous relative position integration mechanism under a condition of broadcast latency of the position increment.
denotes the broadcast latency, while the current observation time is
. This means that there is a latency of position increments at
. The relative position of the current observation time can still be integrated as
where
denotes the position increment of the rover from
to
, as calculated by the TC-GNSS/INS integration algorithm, and
denotes the predicted position increment of the moving base from
to
, calculated by the polynomial prediction algorithm, which is represented by green dotted arrows in
Figure 3. Position increments from the moving base should be received at
. The blank of the relative positions caused by the latency of position increments can be filled in by the integration mechanism. It is worth noting that the broadcast latency of position increments makes the maximal prediction time of position increments of the moving base longer, thereby reducing the prediction accuracy.
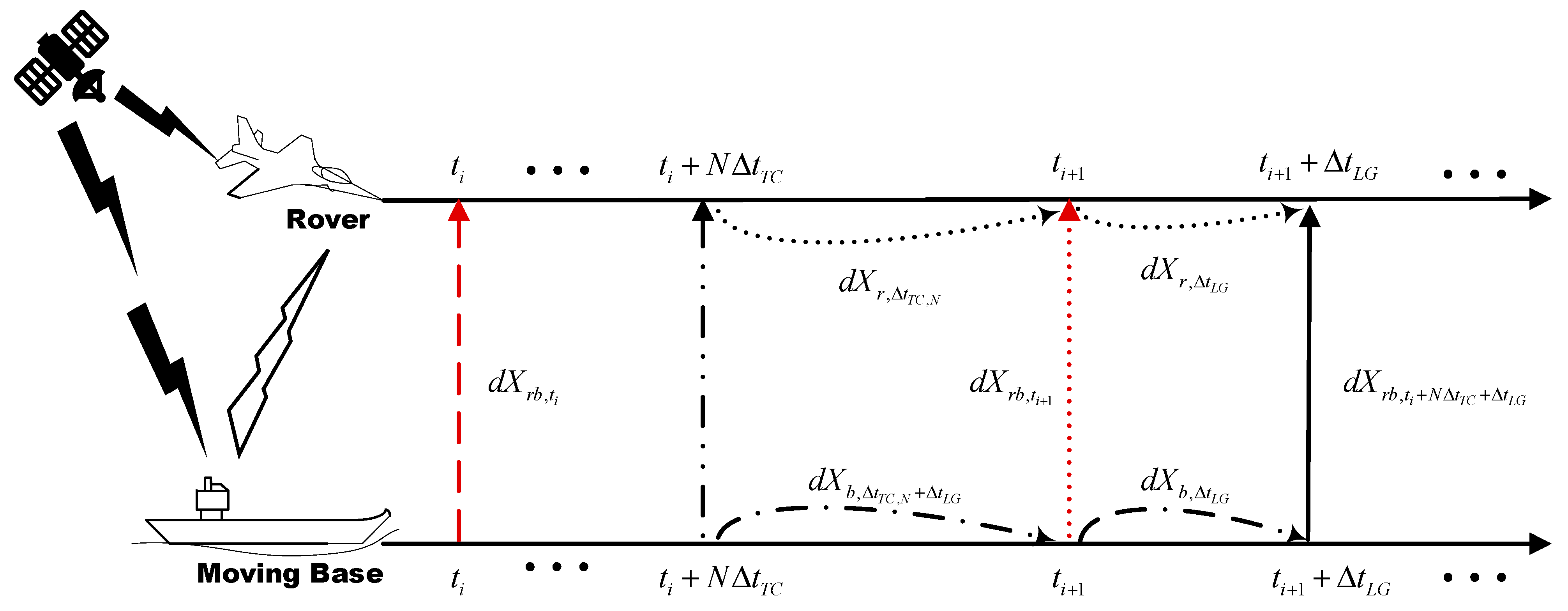
Figure 4 shows the integration mechanism of synchronous relative position in the presence of broadcast latency affecting the raw GNSS observations.
denotes the total number of position increments between adjacent RTK DGNSS relative positions;
denotes the broadcast latency;
denotes the time when the RTK DGNSS relative position can be obtained; and
denotes the corresponding relative position, which is represented by red dotted vertical arrows. The current observation time is
, where
. If the raw GNSS observations of the moving base at
are received in a timely manner by the rover,
can be obtained and used in the integration process. However,
cannot be obtained due to the latency of the raw GNSS observations from the moving base. The most recent historical baseline vectors between the rover and moving base can be used in the integration process in such a case. Therefore, the relative position of the current observation time can still be integrated as
where
denotes the position increment of the rover from
to
, calculated by the TC-GNSS/INS integration algorithm;
denotes the position increment of the moving base from
to
, as predicted by the polynomial prediction algorithm. Blank relative positions caused by the latency of raw GNSS observations can be filled in by constructing the most recent RTK DGNSS relative position and summing the position increments. It is also worth noting that broadcast latency of raw GNSS observations will increase the cumulative error of the position increments.
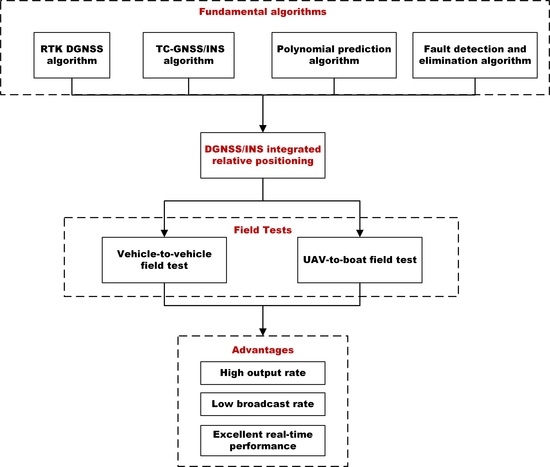
The proposed method can not only provide precise relative positions at an ultra-high rate, but can also overcome the adverse effect of broadcast latency of position increments and raw GNSS observations on the real-time performance. Four kinds of fundamental algorithms, namely, the RTK DGNSS relative positioning algorithm, TC-GNSS/INS integration algorithm, prediction algorithm for position increments and the FDE algorithm are combined in the method. The RTK DGNSS relative positioning algorithm and TC-GNSS/INS integration algorithm are basic algorithms. The prediction algorithm for position increments and FDE algorithm are used to improve the output rate, accuracy and reliability of the relative positioning solutions introduced in the subsequent sections.
Last but not least, we note that the proposed method also shows benefits in terms of reducing the broadcast and sampling rates. If only RTK DGNSS relative solutions are applied, the output rate will be determined by the broadcast and sampling rates of the raw GNSS observations. Thus, communication burden will be heavy for high-rate output. With the help of position increments, as determined by the TC-GNSS/INS integration algorithm of the rover and moving base, the broadcast and sampling rates of raw GNSS observations can be greatly reduced. With the help of position increments predicted by the polynomial prediction algorithm, the broadcast rate of position increments can also be reduced. However, prediction time cannot be too long, i.e., the broadcast rate of position increments should remain relatively high, especially for complex motion conditions. Fortunately, position increment datasets are small, unlike raw GNSS observations. Thus, the broadcast rate of position increments can be increased appropriately. On the other hand, as short-term, precise position increments can be provided by the TC-GNSS/INS integration algorithm, the sampling rates of receivers can be reduced to reduce computational load and power consumption. Additionally, if the motion state of the moving base is simple, e.g., a straight line, the broadcast rate of the position increments of the moving base can also be reduced. A detailed analysis of the effects of the data broadcast rate and sampling rate will be carried out based on two field tests in
Section 3.1.
2.5. FDE Algorithm
Outliers in GNSS observations should be detected and eliminated before observations are used for relative positioning. Carrier phase cycle slip and pseudo-range outliers are the most common faults. Multiple methods have been designed and combined to detect and eliminate these faults.
As for carrier phase cycle slips, the classic geometry-free carrier phase combination (GF) method is combined with the INS-aided cycle slip detection method to detect and simultaneously exclude single- or double-frequency cycle slips in different satellites. The test statistic of the GF method and the corresponding variance are constructed as
where
denotes the number of the satellite to be detected;
denotes the number of the station;
and
denote two different signal frequencies;
denotes wavelengths;
denotes variance;
is the carrier phase observation, which can be in undifferenced (UD), single-differenced (SD) or double-differenced (DD) form; finally,
and
are a priori information, which is given according to the statistical characteristics of the carrier phase. To simplify the present description, we define the GF method with the UD, SD between satellites, SD between receivers and DD between satellites and receivers as the UD GF method, BS-SD GF method, BR-SD GF method and DD GF method, respectively. The GF method shows excellent performance in terms of detecting small cycle slips, but it cannot detect special dual-frequency cycle slips. Additionally, it cannot identify single-frequency cycle slips and requires the use of a dual-frequency receiver.
The INS-aided cycle slip detection method can overcome defects in the GF method. Its test statistics for single-station combination observations and corresponding variance are constructed as
where
denotes the number of the reference satellites,
denotes the signal frequency,
denotes the speed of light,
denotes satellite clock error, and
denotes the satellite-receiver range, which can be expressed as
where
denotes the position of satellite
;
denotes the position of station
, as predicted by INS, which is calculated by the TC-GNSS/INS integration algorithm; and
is a priori information.
is also calculated by the TC-GNSS/INS integration algorithm. In the present description, this kind of INS-aided method is referred to as the BS-SD INS-aided method.
When the observations and absolute position of the moving base are received by the rover, a test statistic for dual-station combination observations and the corresponding variance can be constructed as
where
can be expressed as
where
denotes position of station
provided by the datalink, which is calculated by the TC-GNSS/INS integration algorithm in the moving base; and
is a priori information.
is also calculated by the TC-GNSS/INS integration algorithm. In the present description, this kind of INS-aided method is referred to as the DD INS-aided method. By combining the GF and INS-aided methods, all kinds of cycle slips can be detected and excluded.
As for pseudo-range outliers, considering the poor detection performance of GNSS methods alone, we only use INS-aided outlier detection methods for single- and dual-station combination observations. The construction of test statistics and the corresponding variance of a single-station is expressed as
where
is a priori information, which is given according to the statistical characteristics of the pseudo-range;
denotes ionospheric delay, calculated using the dual-frequency ionosphere-free combination [
26]; and
is tropospheric delay, corrected by the Saastamoinen model [
32]. When there are GNSS observations from two receivers under a short baseline condition, it is assumed that the ionospheric and tropospheric delay are eliminated by the double-differenced combinations between satellites and receivers. The statistic and corresponding variance of the dual-station are constructed as
All the test statistics mentioned above are assumed to be normal distributions with zero mean and known variance in null hypothesis, in which the mean equals the value of the outlier and the variance is constant in alternative hypotheses. Thus, given the required false alarm risk
, the test threshold is expressed as
where
denotes the standard deviation of the test statistic, which is the root of variance of the test statistic. This can be calculated by (19), (20), (22) and (25), whereby
is the inverse function of
, which is defined as
Let’s assume that represents the test statistic of all of the methods described above, which can be calculated by (19), (20), (22) and (25). If , the corresponding observations can be used for subsequent relative positioning. As for the GF method, if , both of the two channels, using different frequencies in the corresponding carrier phase observations, should be eliminated. As for INS-aided cycle slip and pseudo-range outlier detection, if , the corresponding single channel of the carrier phase or pseudo-range should be eliminated.
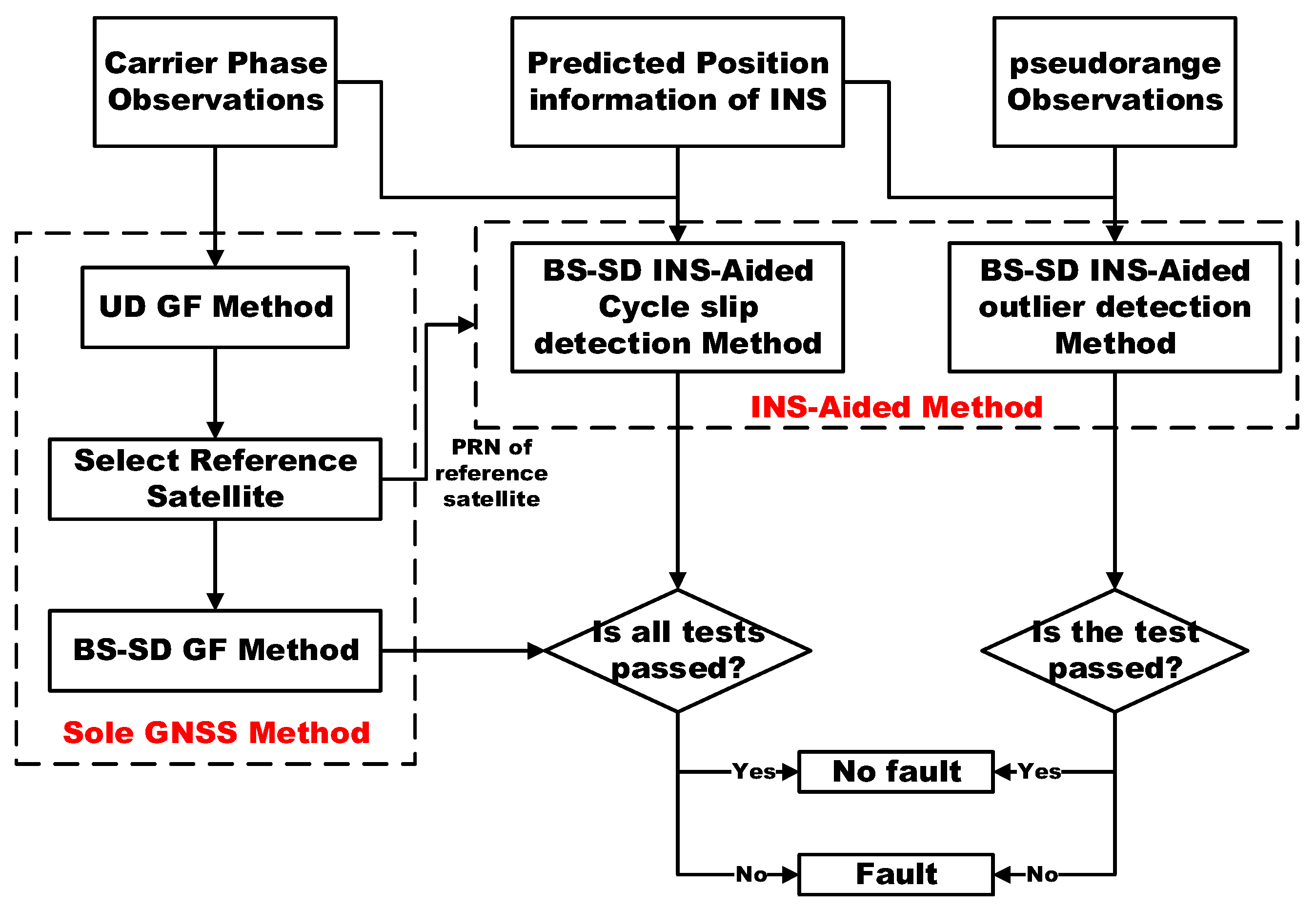
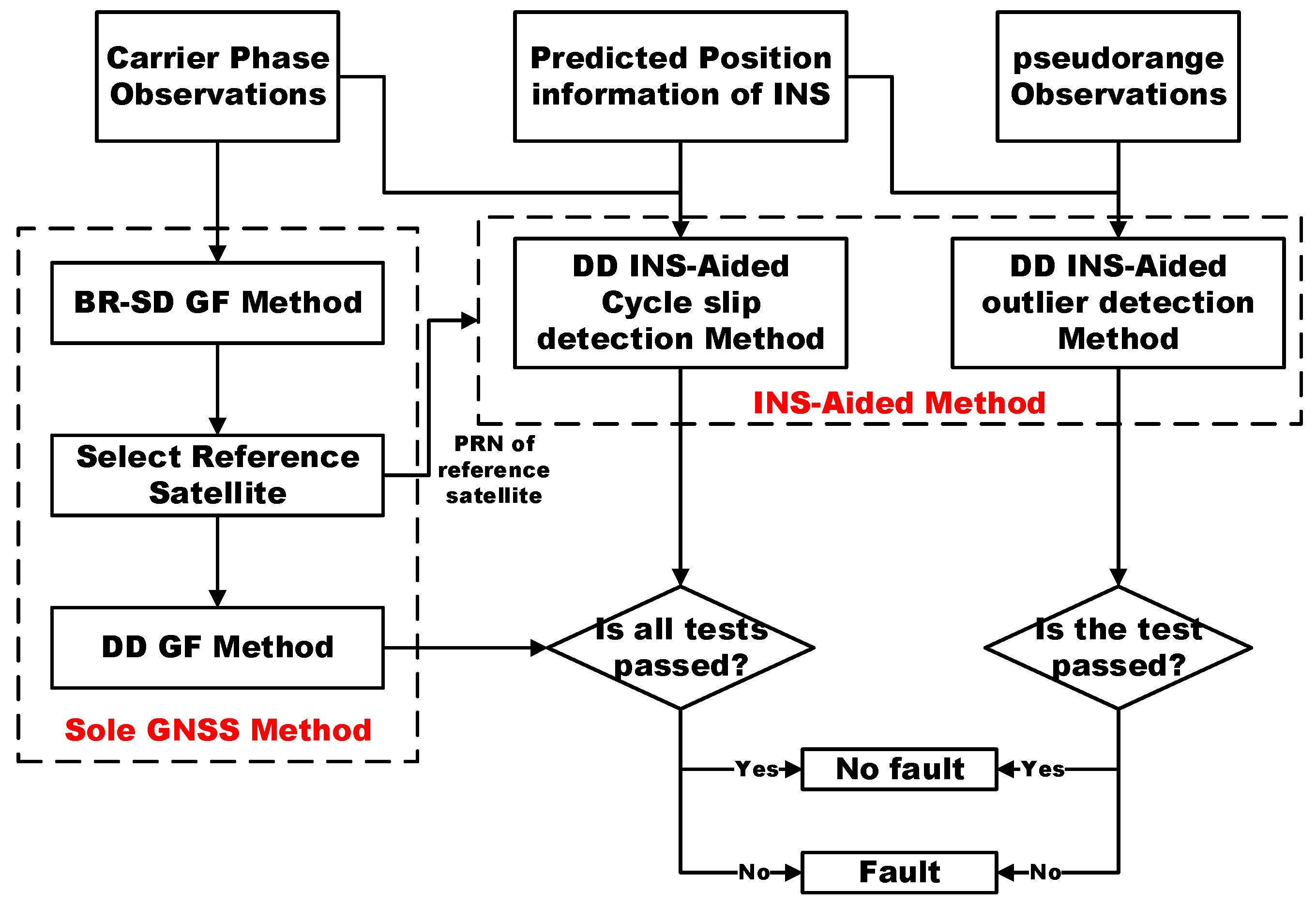
All of these methods are combined to detect and eliminate carrier phase cycle slips and pseudo-range outliers for single- or dual-station combination observations. In order to make the most of the advantages of each method, we designed a combined fault detection rule for single- and dual-station fault detection, as shown in
Figure 5 and
Figure 6. Use of the GNSS method alone means that only GNSS observations are used to construct test statistics, while the implementation of the INS-aided method facilitates the solutions of the TC-GNSS/INS integrated algorithm. The UD GF and BR-SD GF methods are used to prevent faulty satellites from being taken as the reference satellite before SD operations among satellites and DD operation are carried out. Then, the GNSS and INS-aided methods are combined to detect faults. Once a fault is detected, the corresponding satellite is eliminated in the subsequent positioning calculation.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}