
Multisite and Multitemporal Grassland Yield Estimation Using UAV-Borne Hyperspectral Data

 , , , and
, , , and
Abstract
:1. Introduction
- Identification of the optimal ML approach for forage yield estimation of grassland habitats characterized by different management intensities.
- Evaluation of prediction performance stability of the ML approach throughout the growing season and between different geographic regions.
2. Materials and Methods
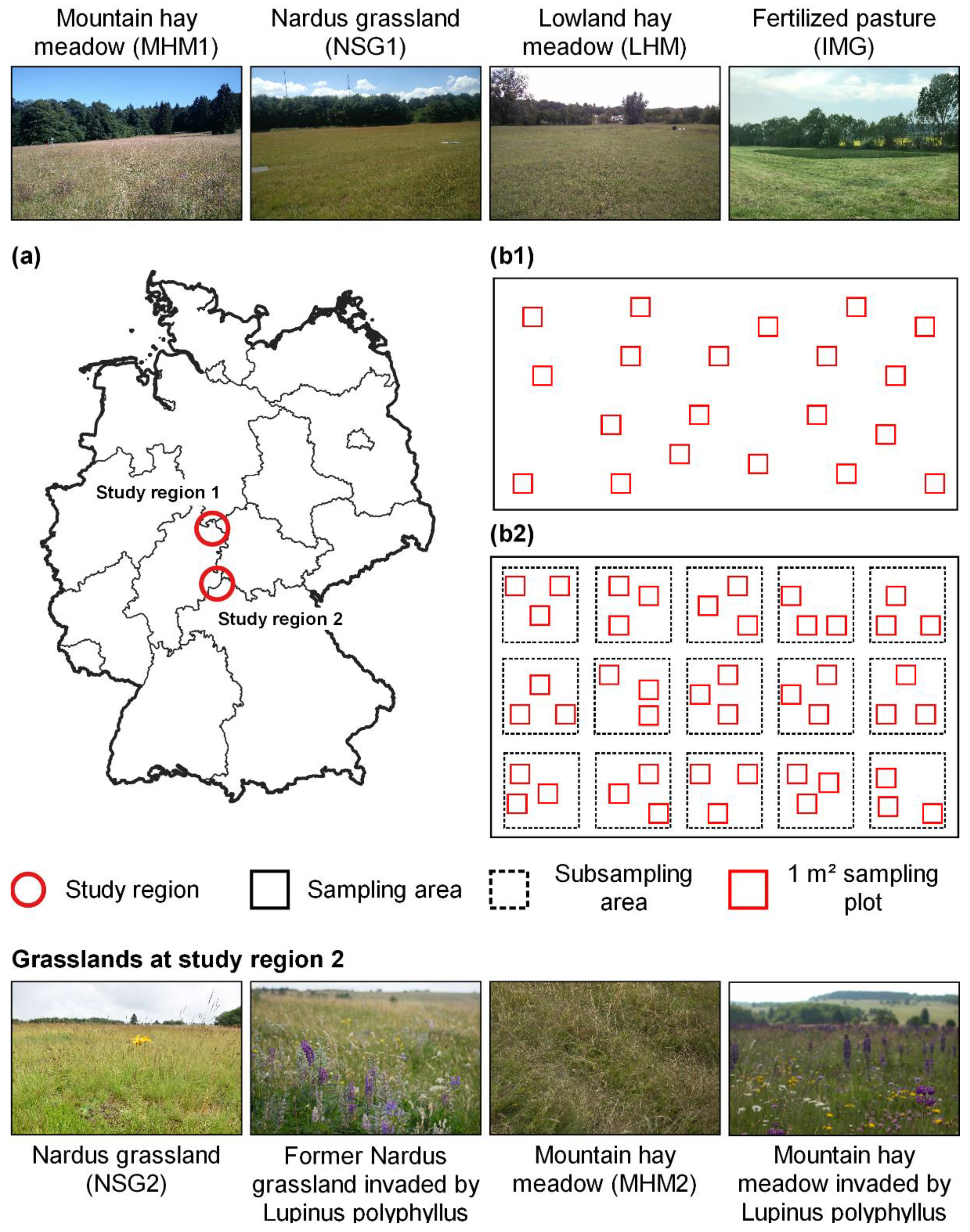
2.1. Study Sites
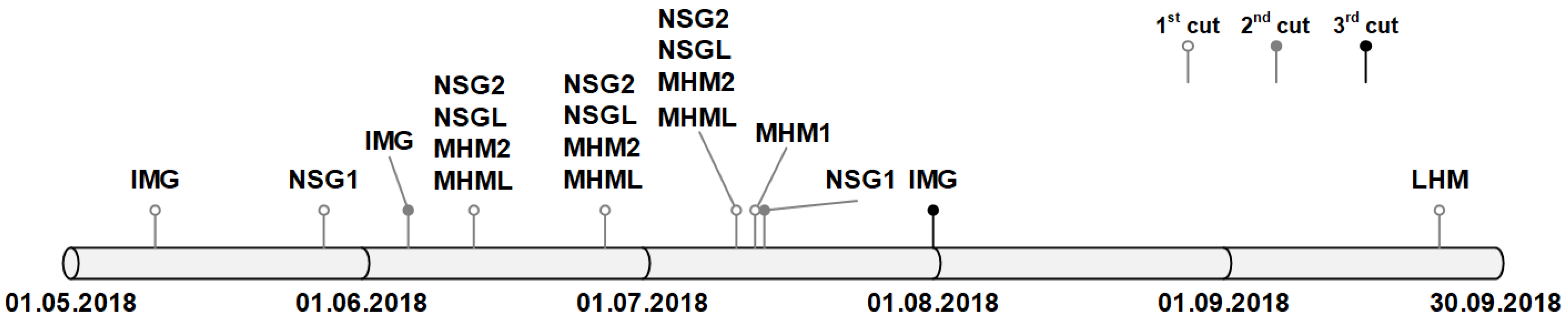
2.2. Biomass Sampling
2.3. Hyperspectral Imaging
2.4. Data Processing
2.5. Data Analysis
3. Results
3.1. Biomass Data
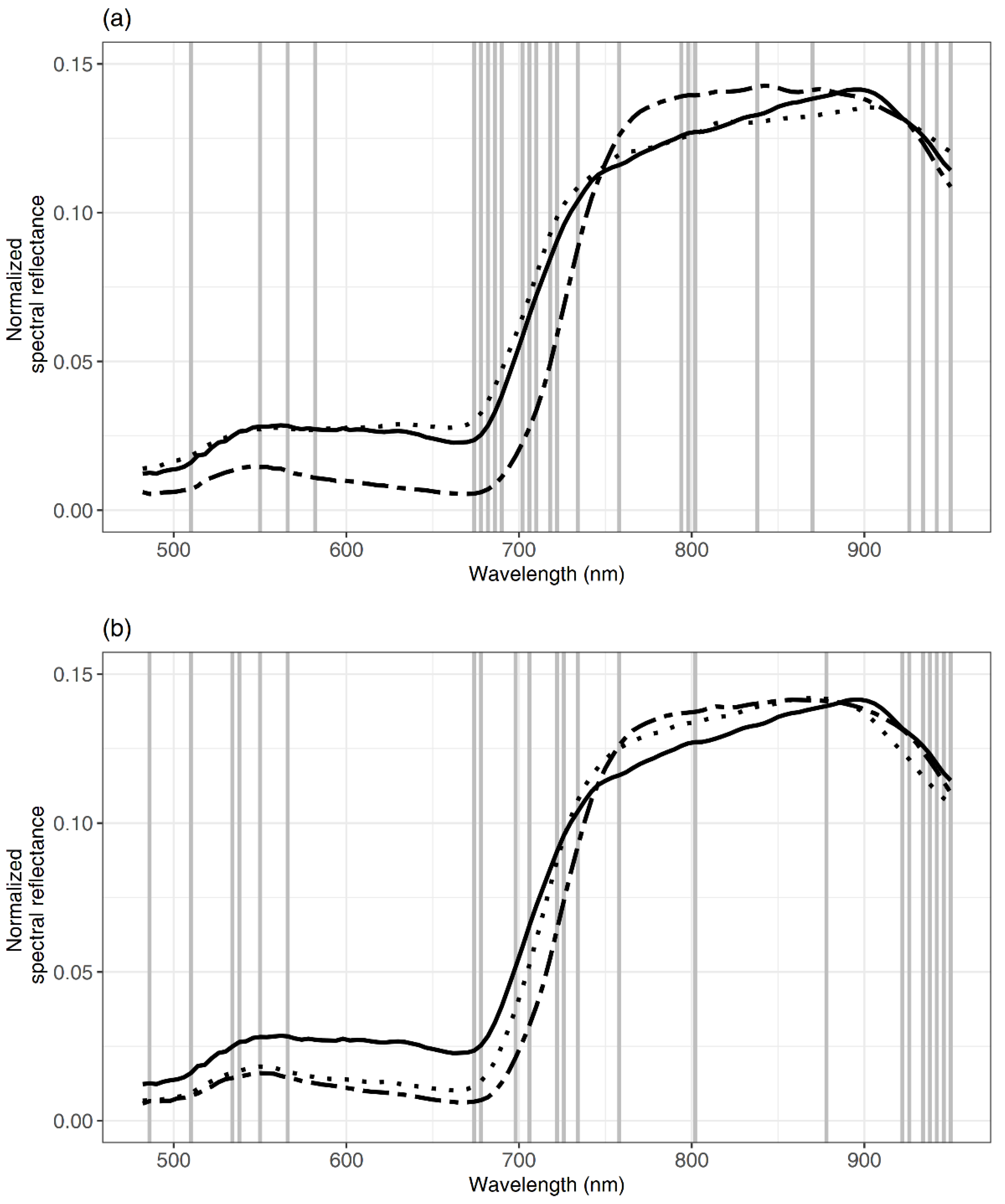
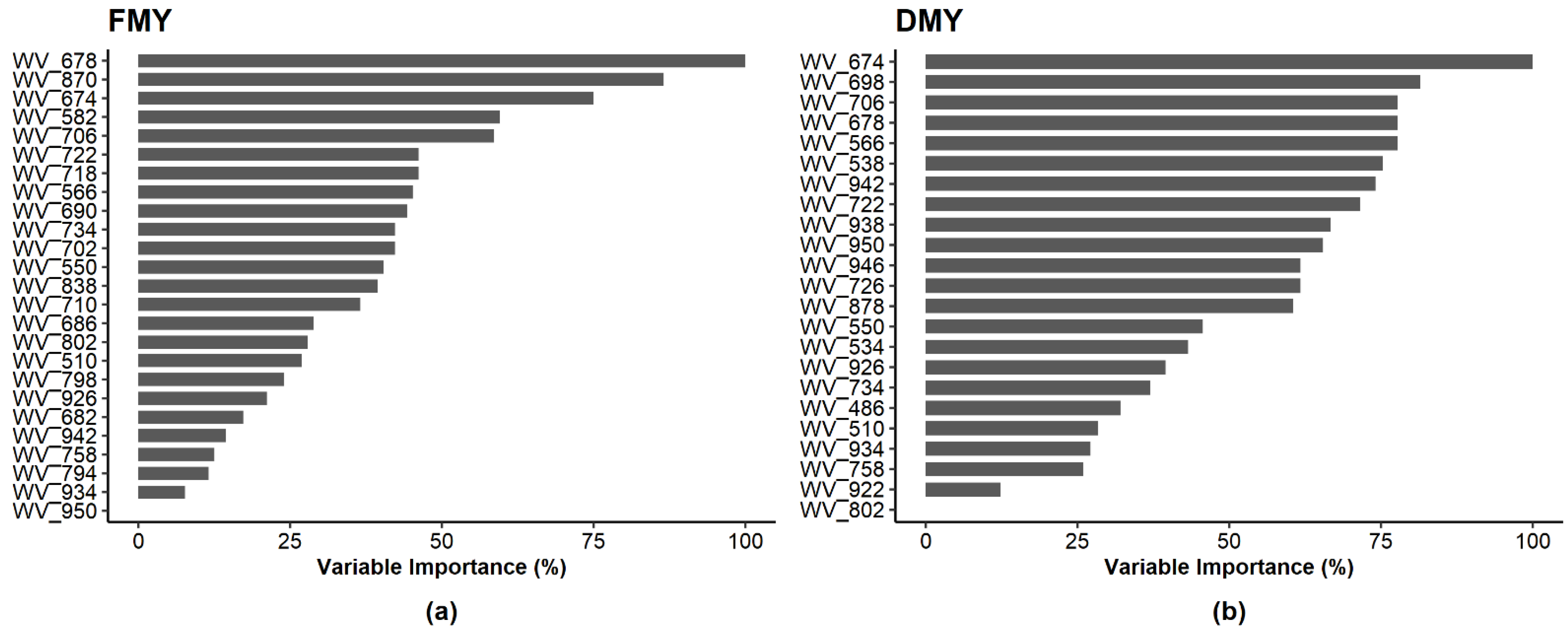
3.2. Spectral Data and Selected Spectral Bands
3.3. Performance of Modeling Algorithms
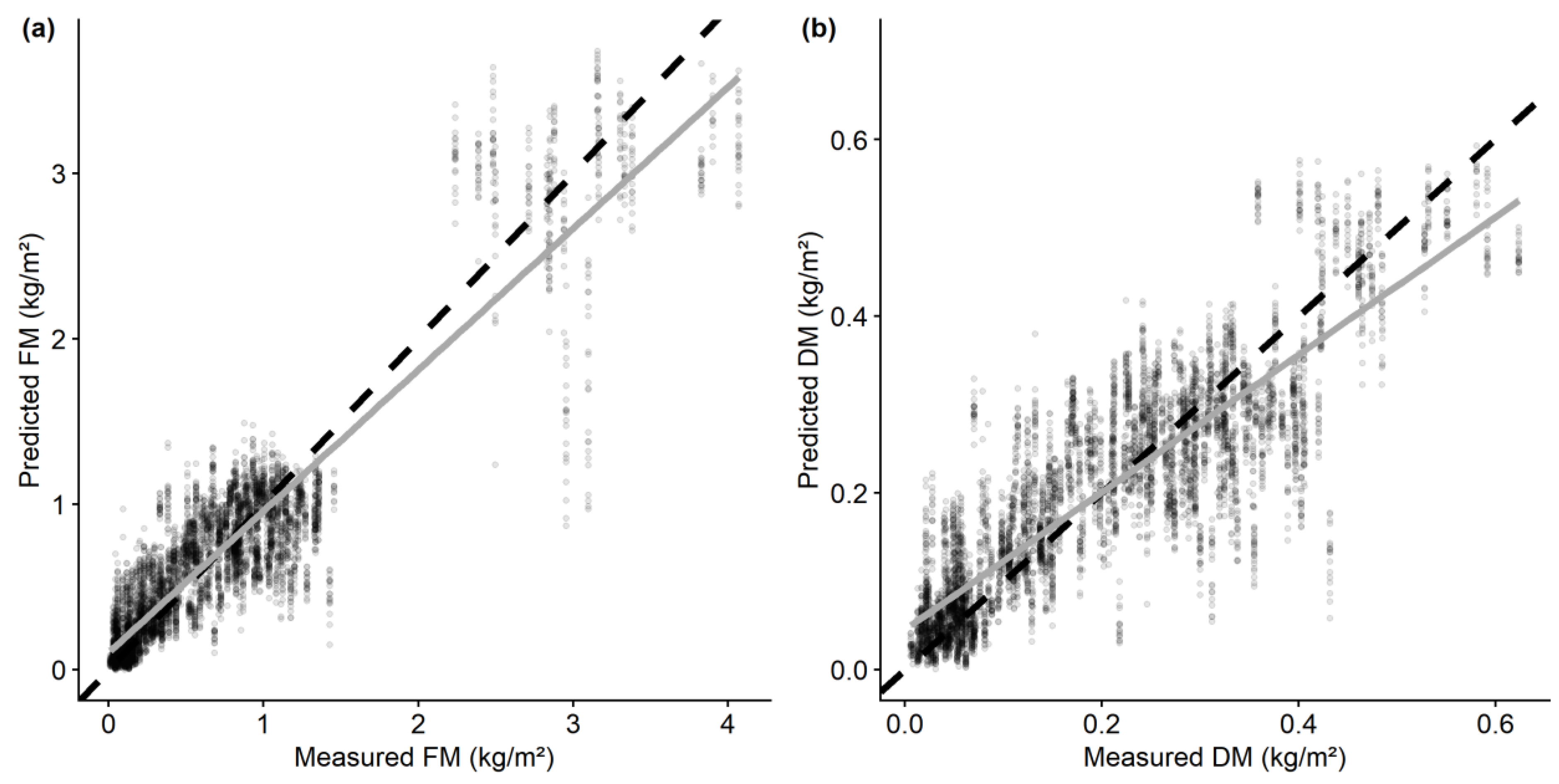
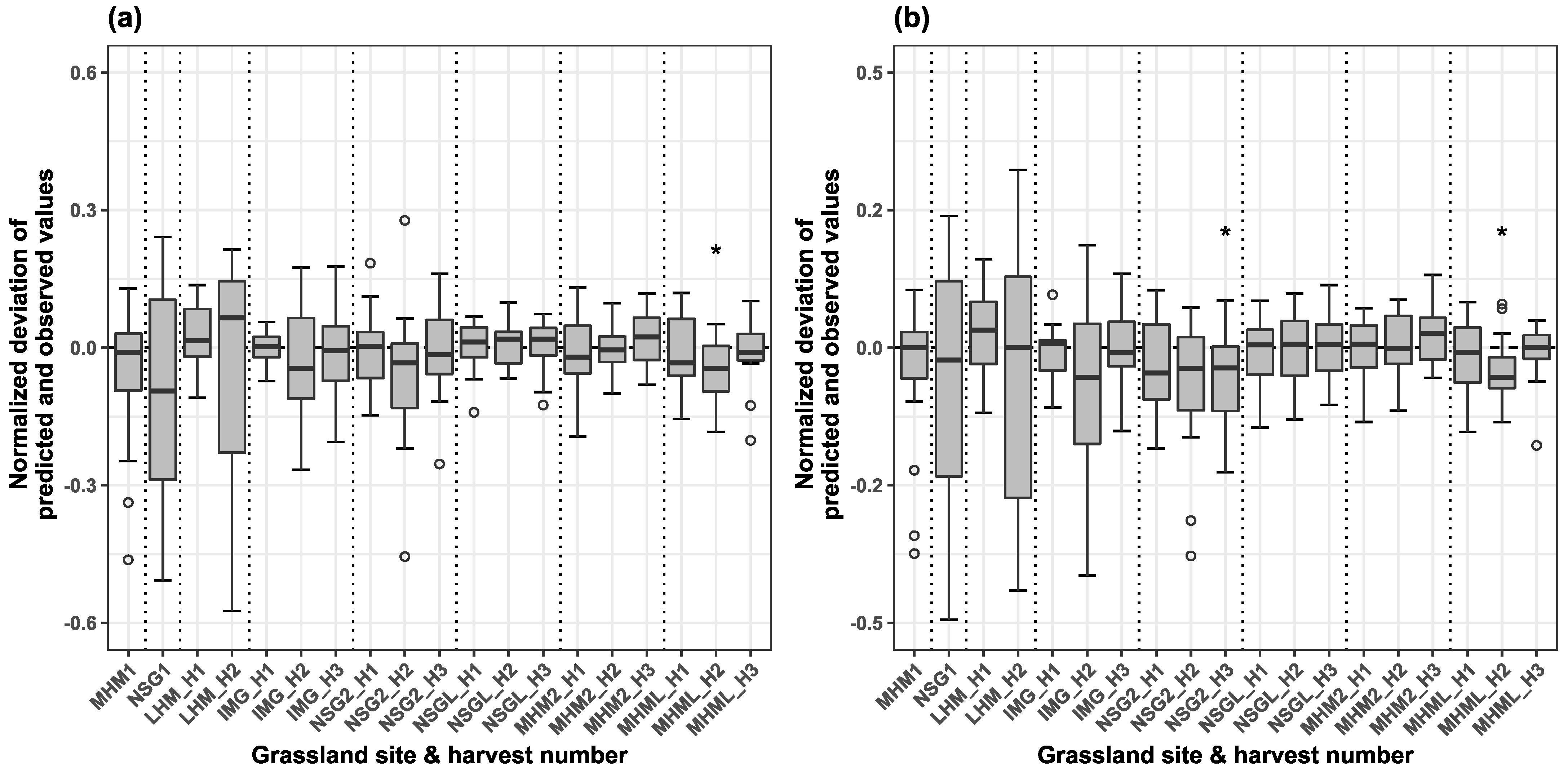
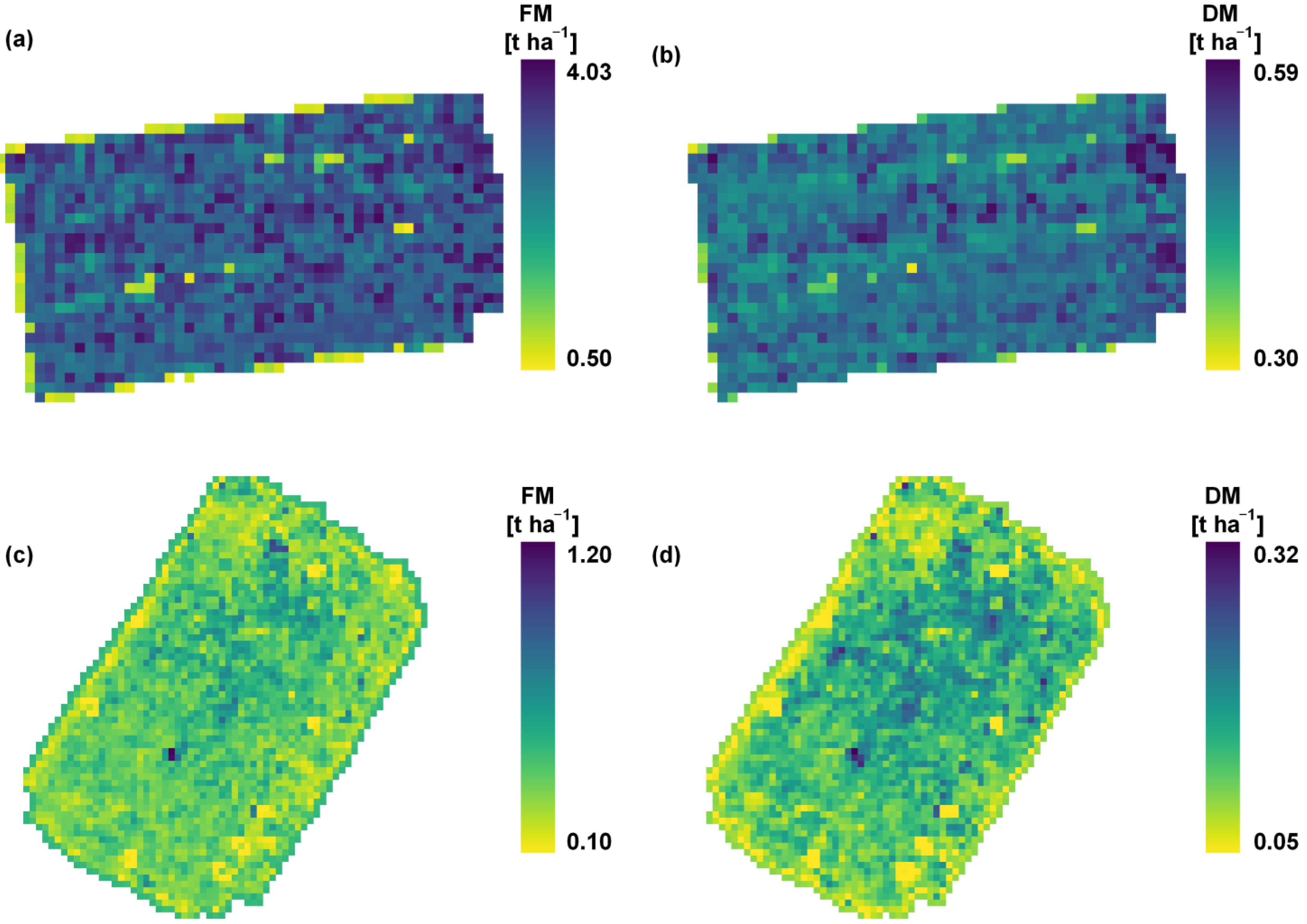
3.4. Final Model
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grassland Site | Number of Cuts | Median FMY (kg/m2) | Median DMY (kg/m2) |
|---|---|---|---|
| MHM1 | 1st | 0.36 | 0.14 |
| NSG1 | 1st | 0.05 | 0.03 |
| LHM | 1st | 0.89 | 0.27 |
| 2nd | 0.09 | 0.04 | |
| IMG | 1st | 2.95 | 0.47 |
| 2nd | 0.22 | 0.05 | |
| 3rd | 0.17 | 0.06 | |
| NSG2 | 1st | 0.13 | 0.06 |
| 1st | 0.13 | 0.05 | |
| 1st | 0.28 | 0.11 | |
| NSGL | 1st | 0.84 | 0.24 |
| 1st | 0.73 | 0.23 | |
| 1st | 0.72 | 0.29 | |
| MHM2 | 1st | 1.06 | 0.29 |
| 1st | 1.04 | 0.33 | |
| 1st | 1.13 | 0.36 | |
| MHML | 1st | 0.72 | 0.21 |
| 1st | 0.61 | 0.19 | |
| 1st | 0.98 | 0.33 |
References
- Smit, H.J.; Metzger, M.J.; Ewert, F. Spatial Distribution of Grassland Productivity and Land Use in Europe. Agric. Syst. 2008, 98, 208–219. [Google Scholar] [CrossRef]
- Wachendorf, M.; Fricke, T.; Möckel, T. Remote Sensing as a Tool to Assess Botanical Composition, Structure, Quantity and Quality of Temperate Grasslands. Grass Forage Sci. 2018, 73, 1–14. [Google Scholar] [CrossRef]
- Harmoney, K.R.; Moore, K.J.; George, J.R.; Brummer, E.C.; Russell, J.R. Determination of Pasture Biomass Using Four Indirect Methods. Agron. J. 1997, 89, 665–672. [Google Scholar] [CrossRef]
- Hakl, J.; Hrevušová, Z.; Hejcman, M.; Fuksa, P. The Use of a Rising Plate Meter to Evaluate Lucerne (Medicago sativa L.) Height as an Important Agronomic Trait Enabling Yield Estimation. Grass Forage Sci. 2012, 67, 589–596. [Google Scholar] [CrossRef]
- Reinermann, S.; Asam, S.; Kuenzer, C. Remote Sensing of Grassland Production and Management—A Review. Remote Sens. 2020, 12, 1949. [Google Scholar] [CrossRef]
- Safari, H.; Fricke, T.; Reddersen, B.; Möckel, T.; Wachendorf, M. Comparing Mobile and Static Assessment of Biomass in Heterogeneous Grassland with a Multi-Sensor System. J. Sens. Sens. Syst. 2016, 5, 301–312. [Google Scholar] [CrossRef] [Green Version]
- Stumpf, F.; Schneider, M.K.; Keller, A.; Mayr, A.; Rentschler, T.; Meuli, R.G.; Schaepman, M.; Liebisch, F. Spatial Monitoring of Grassland Management Using Multi-Temporal Satellite Imagery. Ecol. Indic. 2020, 113, 106201. [Google Scholar] [CrossRef]
- Wijesingha, J.; Moeckel, T.; Hensgen, F.; Wachendorf, M. Evaluation of 3D Point Cloud-Based Models for the Prediction of Grassland Biomass. Int. J. Appl. Earth Obs. Geoinf. 2019, 78, 352–359. [Google Scholar] [CrossRef]
- Grüner, E.; Wachendorf, M.; Astor, T. The Potential of UAV-Borne Spectral and Textural Information for Predicting Aboveground Biomass and N Fixation in Legume-Grass Mixtures. PLoS ONE 2020, 15, e0234703. [Google Scholar] [CrossRef]
- Schulze-Brüninghoff, D.; Wachendorf, M.; Astor, T. Remote Sensing Data Fusion as a Tool for Biomass Prediction in Extensive Grasslands Invaded by L. polyphyllus. Remote Sens. Ecol. Conserv. 2021, 7, 198–213. [Google Scholar] [CrossRef]
- Näsi, R.; Viljanen, N.; Kaivosoja, J.; Alhonoja, K.; Hakala, T.; Markelin, L.; Honkavaara, E. Estimating Biomass and Nitrogen Amount of Barley and Grass Using UAV and Aircraft Based Spectral and Photogrammetric 3D Features. Remote Sens. 2018, 10, 1082. [Google Scholar] [CrossRef] [Green Version]
- Oliveira, R.A.; Näsi, R.; Niemeläinen, O.; Nyholm, L.; Alhonoja, K.; Kaivosoja, J.; Jauhiainen, L.; Viljanen, N.; Nezami, S.; Markelin, L.; et al. Machine Learning Estimators for the Quantity and Quality of Grass Swards Used for Silage Production Using Drone-Based Imaging Spectrometry and Photogrammetry. Remote Sens. Environ. 2020, 246, 111830. [Google Scholar] [CrossRef]
- Geipel, J.; Korsaeth, A. Hyperspectral Aerial Imaging for Grassland Yield Estimation. Adv. Anim. Biosci. 2017, 8, 770–775. [Google Scholar] [CrossRef]
- Kong, B.; Yu, H.; Du, R.; Wang, Q. Quantitative Estimation of Biomass of Alpine Grasslands Using Hyperspectral Remote Sensing. Rangel. Ecol. Manag. 2019, 72, 336–346. [Google Scholar] [CrossRef]
- Lussem, U.; Bolten, A.; Menne, J.; Gnyp, M.L.; Schellberg, J.; Bareth, G. Estimating Biomass in Temperate Grassland with High Resolution Canopy Surface Models from UAV-Based RGB Images and Vegetation Indices. J. Appl. Remote Sens. 2019, 13, 034525. [Google Scholar] [CrossRef]
- Capolupo, A.; Kooistra, L.; Berendonk, C.; Boccia, L.; Suomalainen, J. Estimating Plant Traits of Grasslands from UAV-Acquired Hyperspectral Images: A Comparison of Statistical Approaches. ISPRS Int. J. Geo-Inf. 2015, 4, 2792–2820. [Google Scholar] [CrossRef]
- Wijesingha, J.; Astor, T.; Schulze-Brüninghoff, D.; Wengert, M.; Wachendorf, M. Predicting Forage Quality of Grasslands Using UAV-Borne Imaging Spectroscopy. Remote Sens. 2020, 12, 126. [Google Scholar] [CrossRef] [Green Version]
- Clevers, J.G.P.W.; van der Heijden, G.; Verzakov, S.; Schaepman, M.E. Estimating Grassland Biomass Using SVM Band Shaving of Hyperspectral Data. Photogramm. Eng. Remote Sens. 2007, 73, 1141–1148. [Google Scholar] [CrossRef] [Green Version]
- Genuer, R.; Poggi, J.-M.; Tuleau-Malot, C. VSURF: An R Package for Variable Selection Using Random Forests. R J. 2015, 7, 19–33. [Google Scholar] [CrossRef] [Green Version]
- Kursa, M.B.; Rudnicki, W.R. Feature Selection with the Boruta Package. J. Stat. Softw. 2010, 36, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Löns-Hanna, C.; Kremer, M.; Rittershofer, B. Niedrigwasser und Trockenheit. 2018. Hess. Landesamt Für Nat. Umw. Geol. 2019, 1, 1–21. [Google Scholar]
- Cubert GmbH FireflEYE SE–Hyperspectral Camera. Cubert. S185–Hyperspectral SE. Available online: https://cubert-gmbh.com/ (accessed on 16 April 2022).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021. [Google Scholar]
- Kraemer, N.; Boulesteix, A.-L.; Tutz, G. Penalized Partial Least Squares with Applications to B-Spline Transformations and Functional Data. Chemom. Intell. Lab. Syst. 2008, 94, 60–69. [Google Scholar] [CrossRef] [Green Version]
- Speiser, J.L.; Miller, M.E.; Tooze, J.; Ip, E. A Comparison of Random Forest Variable Selection Methods for Classification Prediction Modeling. Expert Syst. Appl. 2019, 134, 93–101. [Google Scholar] [CrossRef] [PubMed]
- Grüner, E.; Astor, T.; Wachendorf, M. Prediction of Biomass and N Fixation of Legume-Grass Mixtures Using Sensor Fusion. Front. Plant Sci. 2021, 11, 2192. [Google Scholar] [CrossRef]
- Wengert, M.; Piepho, H.-P.; Astor, T.; Graß, R.; Wijesingha, J.; Wachendorf, M. Assessing Spatial Variability of Barley Whole Crop Biomass Yield and Leaf Area Index in Silvoarable Agroforestry Systems Using UAV-Borne Remote Sensing. Remote Sens. 2021, 13, 2751. [Google Scholar] [CrossRef]
- Schulze-Brüninghoff, D.; Wachendorf, M.; Astor, T. Potentials and Limitations of WorldView-3 Data for the Detection of Invasive Lupinus polyphyllus Lindl. in Semi-Natural Grasslands. Remote Sens. 2021, 13, 4333. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Karatzoglou, A.; Meyer, D.; Hornik, K. Support Vector Machines in R. J. Stat. Softw. 2006, 15, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Probst, P.; Boulesteix, A.-L. To Tune or Not to Tune the Number of Trees in Random Forest? J. Mach. Learn. Res. 2017, 18, 6673–6690. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Wright, M.N.; Ziegler, A. Ranger: A Fast Implementation of Random Forests for High Dimensional Data in C++ and R. J. Stat. Softw. 2015, 77, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Quinlan, J.R. Simplifying Decision Trees. Int. J. Hum.-Comput. Stud. 1999, 51, 497–510. [Google Scholar] [CrossRef] [Green Version]
- Quinlan, J.R. Machine Learning: Proceedings of the Tenth International Conference; University of Massachusetts: Amherst, MA, USA, 1993; pp. 27–29. ISBN 978-1-4832-9862-7. [Google Scholar]
- Appelhans, T.; Mwangomo, E.; Hardy, D.R.; Hemp, A.; Nauss, T. Evaluating Machine Learning Approaches for the Interpolation of Monthly Air Temperature at Mt. Kilimanjaro, Tanzania. Spat. Stat. 2015, 14, 91–113. [Google Scholar] [CrossRef] [Green Version]
- Hafeez, S.; Wong, M.S.; Ho, H.C.; Nazeer, M.; Nichol, J.; Abbas, S.; Tang, D.; Lee, K.H.; Pun, L. Comparison of Machine Learning Algorithms for Retrieval of Water Quality Indicators in Case-II Waters: A Case Study of Hong Kong. Remote Sens. 2019, 11, 617. [Google Scholar] [CrossRef] [Green Version]
- Kuhn, M. Building Predictive Models in R Using the Caret Package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Bauer, D.F. Constructing Confidence Sets Using Rank Statistics. J. Am. Stat. Assoc. 1972, 67, 687–690. [Google Scholar] [CrossRef]
- Ollinger, S.V. Sources of Variability in Canopy Reflectance and the Convergent Properties of Plants: Tansley Review. New Phytol. 2011, 189, 375–394. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W.; Kooistra, L.; Schaepman, M.E. Using Spectral Information from the NIR Water Absorption Features for the Retrieval of Canopy Water Content. Int. J. Appl. Earth Obs. Geoinf. 2008, 10, 388–397. [Google Scholar] [CrossRef]
- Lussem, U.; Schellberg, J.; Bareth, G. Monitoring Forage Mass with Low-Cost UAV Data: Case Study at the Rengen Grassland Experiment. PFG–J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 88, 407–422. [Google Scholar] [CrossRef]
- Schucknecht, A.; Seo, B.; Krämer, A.; Asam, S.; Atzberger, C.; Kiese, R. Estimating Dry Biomass and Plant Nitrogen Concentration in Pre-Alpine Grasslands with Low-Cost UAS-Borne Multispectral Data—A Comparison of Sensors, Algorithms, and Predictor Sets. Biogeosciences Discuss. 2021, preprint. [Google Scholar] [CrossRef]
- Frey, L.; Baumann, P.; Aasen, H.; Studer, B.; Kölliker, R. A Non-Destructive Method to Quantify Leaf Starch Content in Red Clover. Front. Plant Sci. 2020, 11, 1533. [Google Scholar] [CrossRef] [PubMed]
- Zandler, H.; Faryabi, S.P.; Ostrowski, S. Contributions to Satellite-Based Land Cover Classification, Vegetation Quantification and Grassland Monitoring in Central Asian Highlands Using Sentinel-2 and MODIS Data. Front. Environ. Sci. 2022, 10, 164. [Google Scholar] [CrossRef]
- Degenhardt, F.; Seifert, S.; Szymczak, S. Evaluation of Variable Selection Methods for Random Forests and Omics Data Sets. Brief. Bioinform. 2019, 20, 492–503. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Gu, S.; Shen, M.; Tang, Y.; Matsushita, B. Estimating Aboveground Biomass of Grassland Having a High Canopy Cover: An Exploratory Analysis of in Situ Hyperspectral Data. Int. J. Remote Sens. 2009, 30, 6497–6517. [Google Scholar] [CrossRef]
- Riano, D.; Vaughan, P.; Chuvieco, E.; Zarco-Tejada, P.J.; Ustin, S.L. Estimation of Fuel Moisture Content by Inversion of Radiative Transfer Models to Simulate Equivalent Water Thickness and Dry Matter Content: Analysis at Leaf and Canopy Level. IEEE Trans. Geosci. Remote Sens. 2005, 43, 819–826. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Asner, G.P.; Ollinger, S.V.; Martin, M.E.; Wessman, C.A. Characterizing Canopy Biochemistry from Imaging Spectroscopy and Its Application to Ecosystem Studies. Remote Sens. Environ. 2009, 113, S78–S91. [Google Scholar] [CrossRef]
- Astor, T.; Dayananda, S.; Nautiyal, S.; Wachendorf, M. Vegetable Crop Biomass Estimation Using Hyperspectral and RGB 3D UAV Data. Agronomy 2020, 10, 1600. [Google Scholar] [CrossRef]
- Flach, P.A. Machine Learning: The Art and Science of Algorithms That Make Sense of Data; Cambridge University Press: Cambridge, UK, 2012; ISBN 978-1-107-42222-3. [Google Scholar]
- Grüner, E.; Astor, T.; Wachendorf, M. Biomass Prediction of Heterogeneous Temperate Grasslands Using an SfM Approach Based on UAV Imaging. Agronomy 2019, 9, 54. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Drǎguţ, L. Random Forest in Remote Sensing: A Review of Applications and Future Directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Fernández-Delgado, M.; Sirsat, M.S.; Cernadas, E.; Alawadi, S.; Barro, S.; Febrero-Bande, M. An Extensive Experimental Survey of Regression Methods. Neural Netw. 2019, 111, 11–34. [Google Scholar] [CrossRef]
- Psomas, A.; Kneubühler, M.; Huber, S.; Itten, K.; Zimmermann, N.E. Hyperspectral Remote Sensing for Estimating Aboveground Biomass and for Exploring Species Richness Patterns of Grassland Habitats. Int. J. Remote Sens. 2011, 32, 9007–9031. [Google Scholar] [CrossRef]
- Keating, B.A.; Carberry, P.S.; Hammer, G.L.; Probert, M.E.; Robertson, M.J.; Holzworth, D.; Huth, N.I.; Hargreaves, J.N.G.; Meinke, H.; Hochman, Z.; et al. An Overview of APSIM, a Model Designed for Farming Systems Simulation. Eur. J. Agron. 2003, 18, 267–288. [Google Scholar] [CrossRef] [Green Version]
- Castro, W.; Marcato Junior, J.; Polidoro, C.; Osco, L.P.; Gonçalves, W.; Rodrigues, L.; Santos, M.; Jank, L.; Barrios, S.; Valle, C.; et al. Deep Learning Applied to Phenotyping of Biomass in Forages with UAV-Based RGB Imagery. Sensors 2020, 20, 4802. [Google Scholar] [CrossRef] [PubMed]








| Sampling Region | Grassland Site | Vegetation Type (Plant Community) | Elevation (m MSL), Coordinates | Intensity of Use | Number of Cuts/Sampling Campaigns/Sampling Plots |
|---|---|---|---|---|---|
| Werra-Meißner district | MHM1 | Mountain hay meadow (Geranio-Trisetetum) | 684, 51°12′48.3″N 9°50′31.5″E | Nature conservation grassland, late harvest, no fertilization | 1/1/20 |
| NSG1 | Soil-moist Nardus grassland (Juncetum squarrosi) | 718, 51°12′49.4″N 9°50′57.3″E | 1/1/20 | ||
| LHM | Lowland hay meadow (Arrhenatheretum elatioris) | 135, 51°20′59.0″N 9°52′16.5″E | Extensive alluvial grassland, no fertilization | 2/2/20 | |
| IMG | Fertilized pasture (Lolio-Cynosuretum) | 199, 51°23′32.9″N 9°55′51.2″E | Intensive grassland, fertilized | 3/3/20 | |
| Rhön Biosphere Reserve | NSG2 | Periodically wet Nardus grassland (Polygalo-Nardetum) | 822, 50°28′44.0″N 9°58′17.1″E | Nature conservation grassland, late harvest, no fertilization | 1/3/15 |
| NSGL | Former Nardus grassland invaded by Lupinus polyphyllus (Polygalo-Nardetum) | 846, 50°29′17.1″N 10°03′40.9″E | 1/3/15 | ||
| MHM2 | Mountain hay meadow (Geranio-Trisetetum) | 739, 50°28′58.4″N 9°59′09.9″E | 1/3/15 | ||
| MHML | Mountain hay meadow invaded by Lupinus polyphyllus (Geranio-Trisetetum) | 839, 50°28′45.0″N 10°02′34.6″E | 1/3/15 |
| Statistic | FMY (kg/m2) | DMY (kg/m2) |
|---|---|---|
| Mean | 0.69 | 0.19 |
| Median | 0.53 | 0.17 |
| Min. | 0.01 | 0.01 |
| Max. | 4.07 | 0.62 |
| Standard deviation | 0.73 | 0.14 |
| Coefficient of variation | 105% | 72% |
| Algorithm | Median RMSEp (kg/m2) | SD RMSEp (kg/m2) | Median nRMSEp | ||
|---|---|---|---|---|---|
| FMY (kg/m2) | PLSR | 0.68 | 0.42 | 0.04 | 11.9% |
| RFR | 0.85 | 0.29 | 0.04 | 8.0% | |
| SVR | 0.86 | 0.29 | 0.03 | 7.9% | |
| CBR | 0.87 | 0.27 | 0.05 | 7.6% | |
| DMY (kg/m2) | PLSR | 0.45 | 0.10 | 0.01 | 18.9% |
| RFR | 0.73 | 0.07 | 0.01 | 13.5% | |
| SVR | 0.74 | 0.07 | 0.01 | 13.0% | |
| CBR | 0.75 | 0.07 | 0.01 | 12.9% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wengert, M.; Wijesingha, J.; Schulze-Brüninghoff, D.; Wachendorf, M.; Astor, T. Multisite and Multitemporal Grassland Yield Estimation Using UAV-Borne Hyperspectral Data. Remote Sens. 2022, 14, 2068. https://doi.org/10.3390/rs14092068
Wengert M, Wijesingha J, Schulze-Brüninghoff D, Wachendorf M, Astor T. Multisite and Multitemporal Grassland Yield Estimation Using UAV-Borne Hyperspectral Data. Remote Sensing. 2022; 14(9):2068. https://doi.org/10.3390/rs14092068
Chicago/Turabian StyleWengert, Matthias, Jayan Wijesingha, Damian Schulze-Brüninghoff, Michael Wachendorf, and Thomas Astor. 2022. "Multisite and Multitemporal Grassland Yield Estimation Using UAV-Borne Hyperspectral Data" Remote Sensing 14, no. 9: 2068. https://doi.org/10.3390/rs14092068
APA StyleWengert, M., Wijesingha, J., Schulze-Brüninghoff, D., Wachendorf, M., & Astor, T. (2022). Multisite and Multitemporal Grassland Yield Estimation Using UAV-Borne Hyperspectral Data. Remote Sensing, 14(9), 2068. https://doi.org/10.3390/rs14092068