
First Earth-Imaging CubeSat with Harmonic Diffractive Lens

 , ,
, ,  , ,
, ,  and
and
Abstract
:1. Introduction
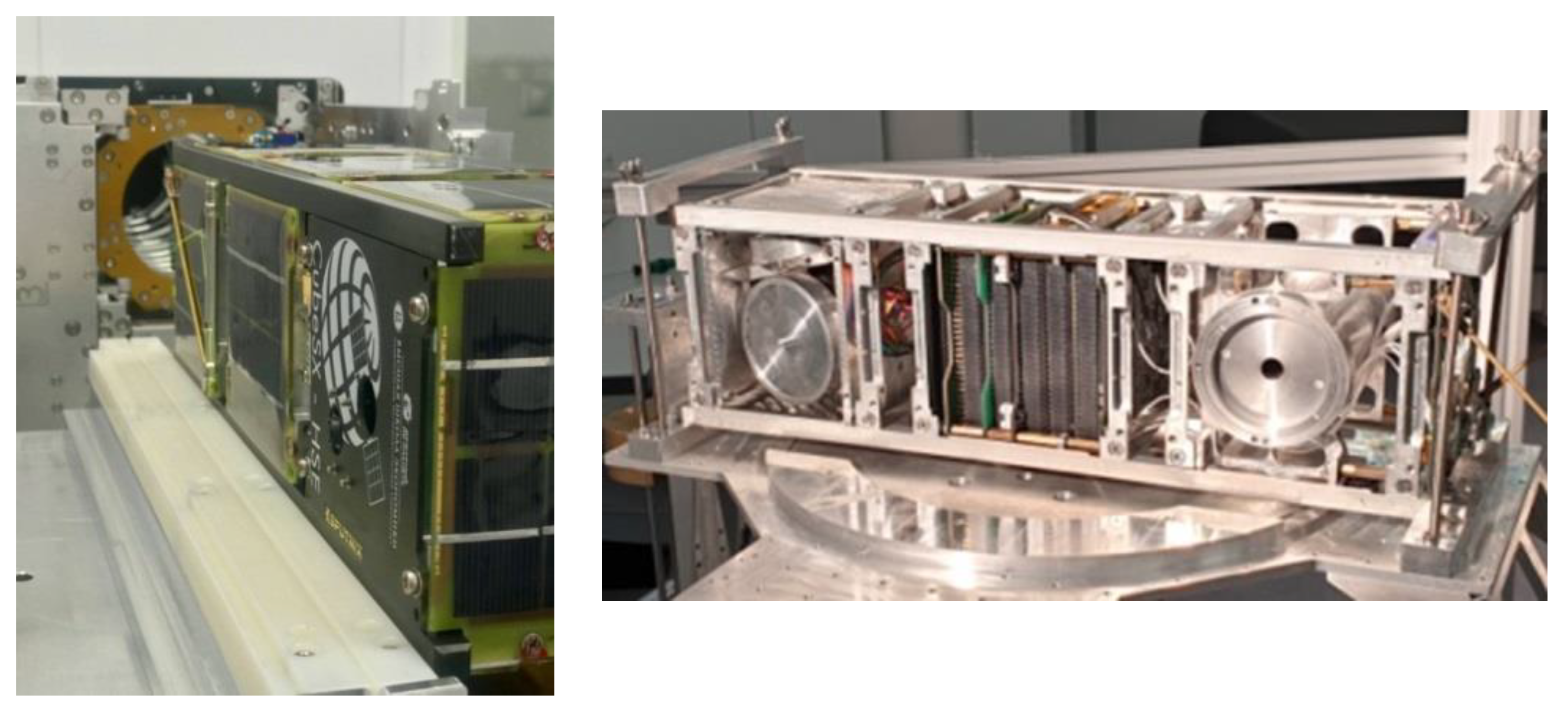
2. A CubeSX-HSE Nanosatellite-Based Remote Sensing Platform
2.1. Nanosatellite Design
2.1.1. Data Transmission System
2.1.2. Hardware Configuration
2.2. Satellite Flight Characteristics
2.3. Onboard Computing Module
- -
- A slot for connecting a Raspberry CM3 processing module with a power supply system;
- -
- An autonomous controller of the orientation and stabilization system;
- -
- An energy-saving sensor microcontroller;
- -
- A gyroscope and magnetometer;
- -
- A unit for electromagnetic coil control;
- -
- A temperature sensor;
- -
- A real-time clock with a battery backup;
- -
- A power supply system;
- -
- A centralized programming and software testing system.
- -
- An energy-efficient microcontroller for data acquisition;
- -
- An orientation and stabilization system controller activated when needed;
- -
- Raspberry Pi 3 for processing computationally intensive tasks of the satellite payload.
- -
- A quad-core module running at 1.2 GHz;
- -
- 1 GB random-access memory;
- -
- 4 GB read-only memory.
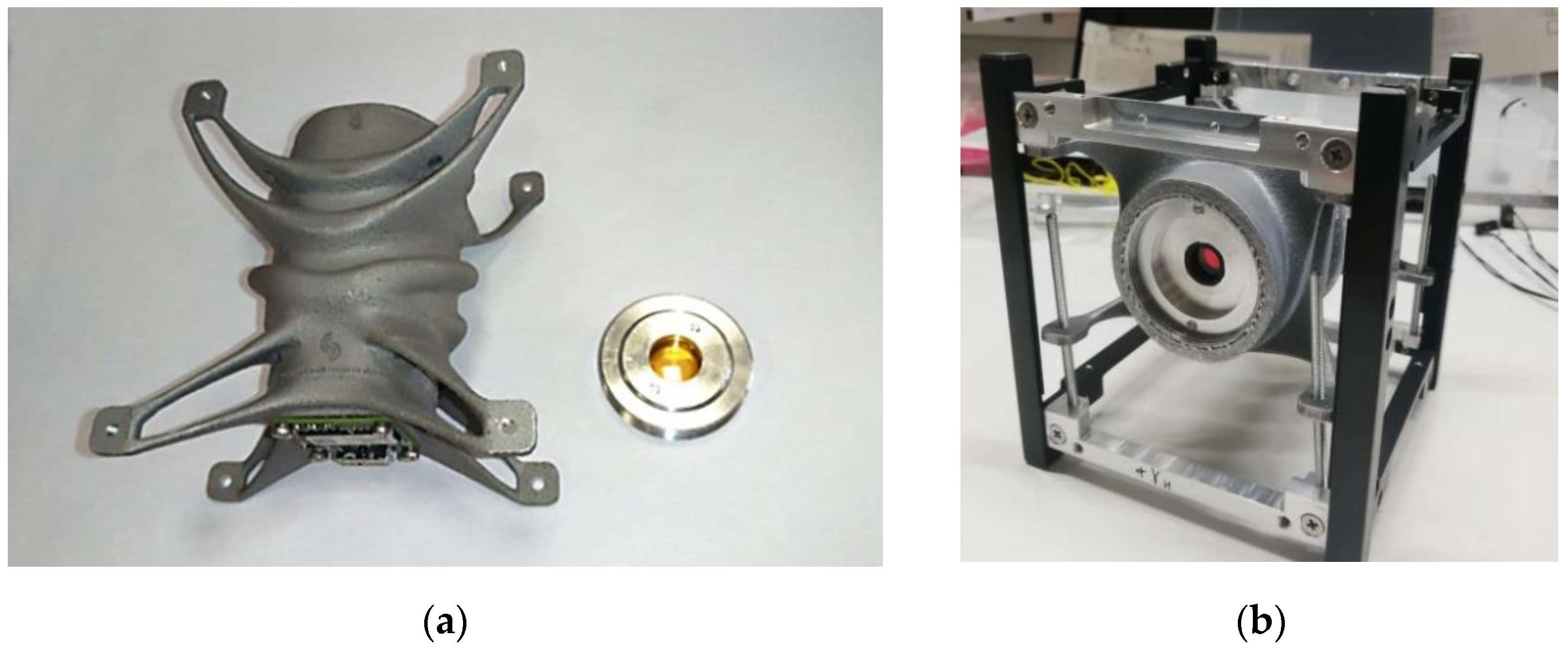
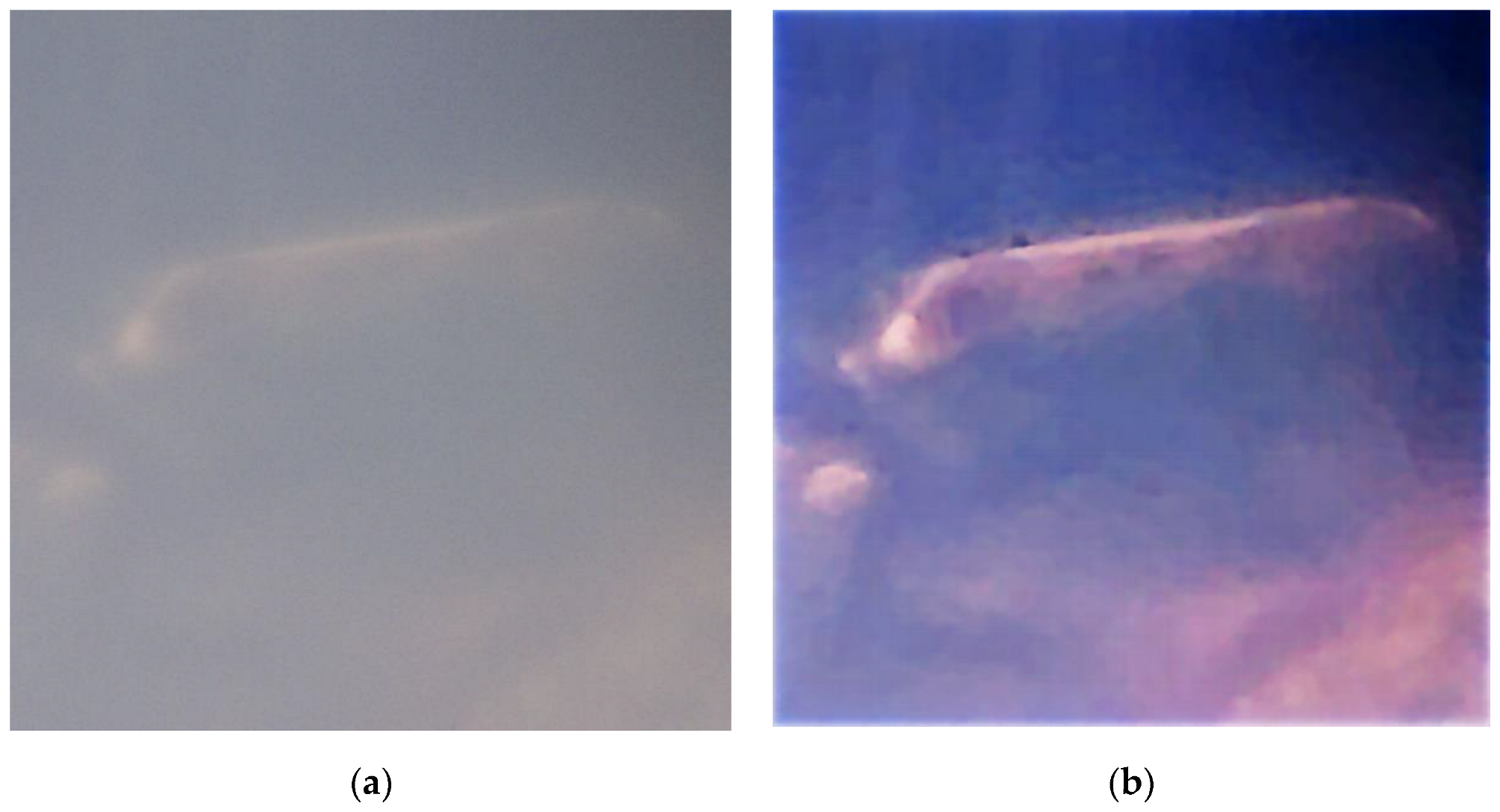
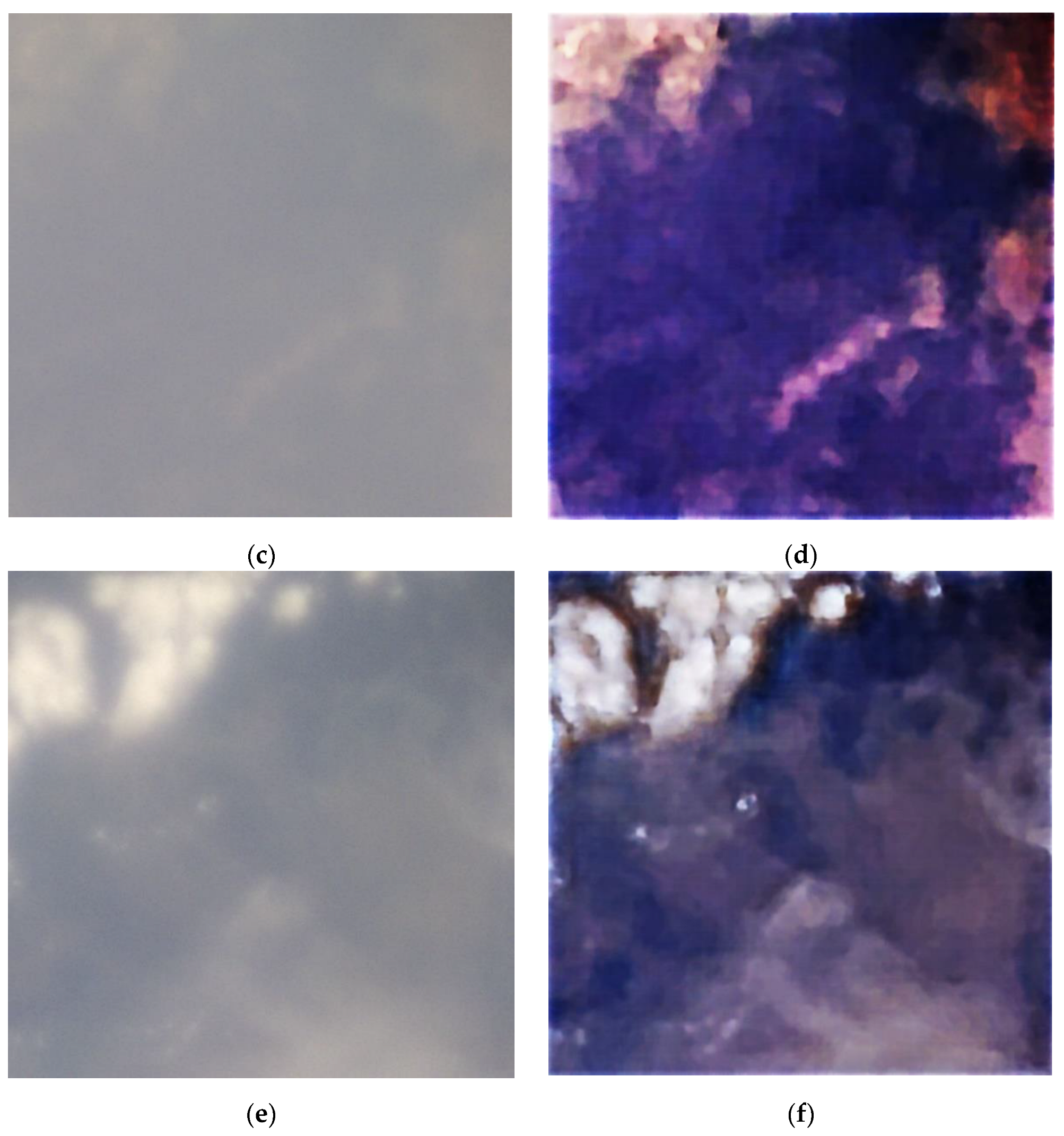
3. Remote Sensing Camera with a Harmonic Diffractive Lens
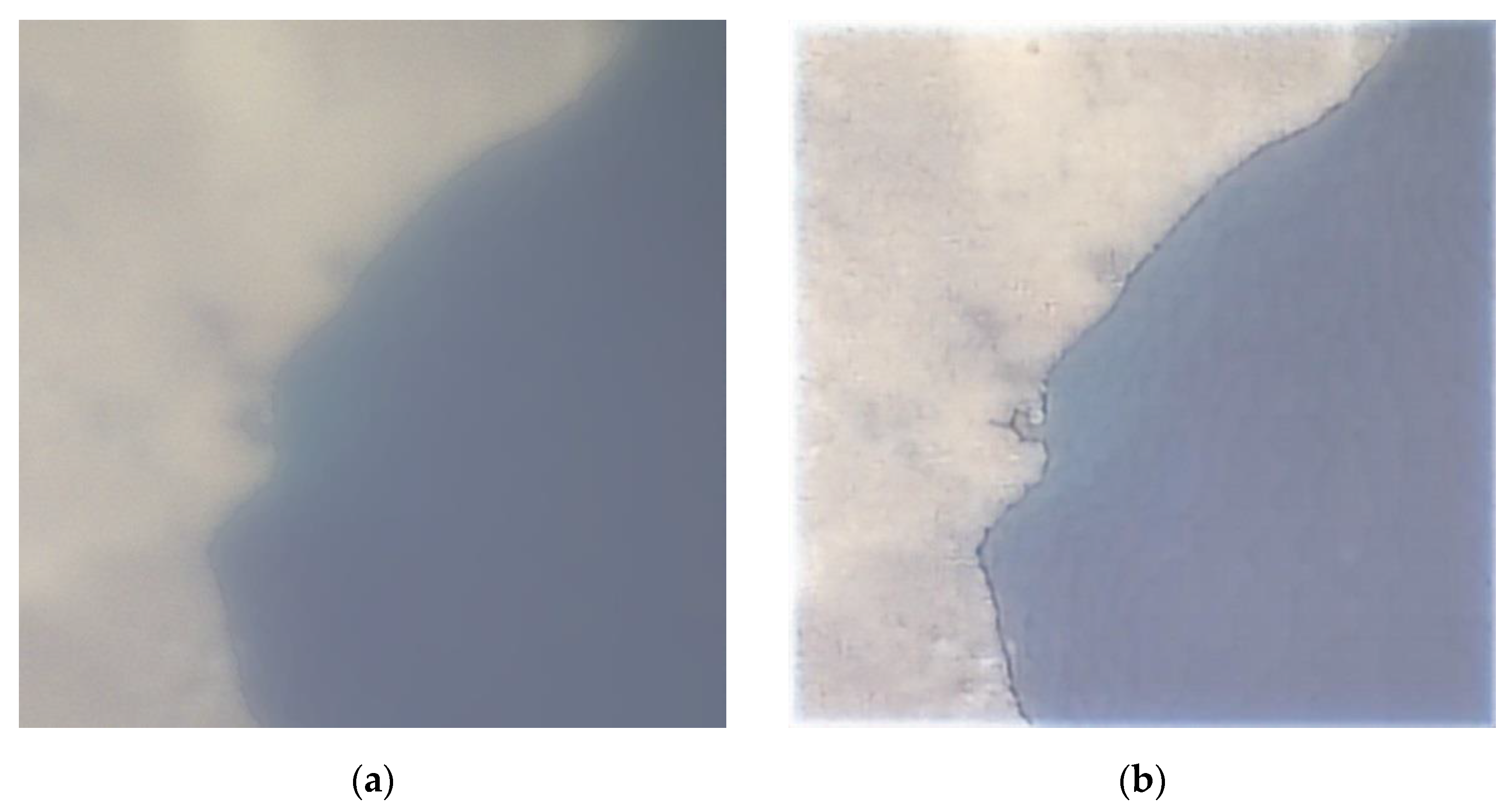
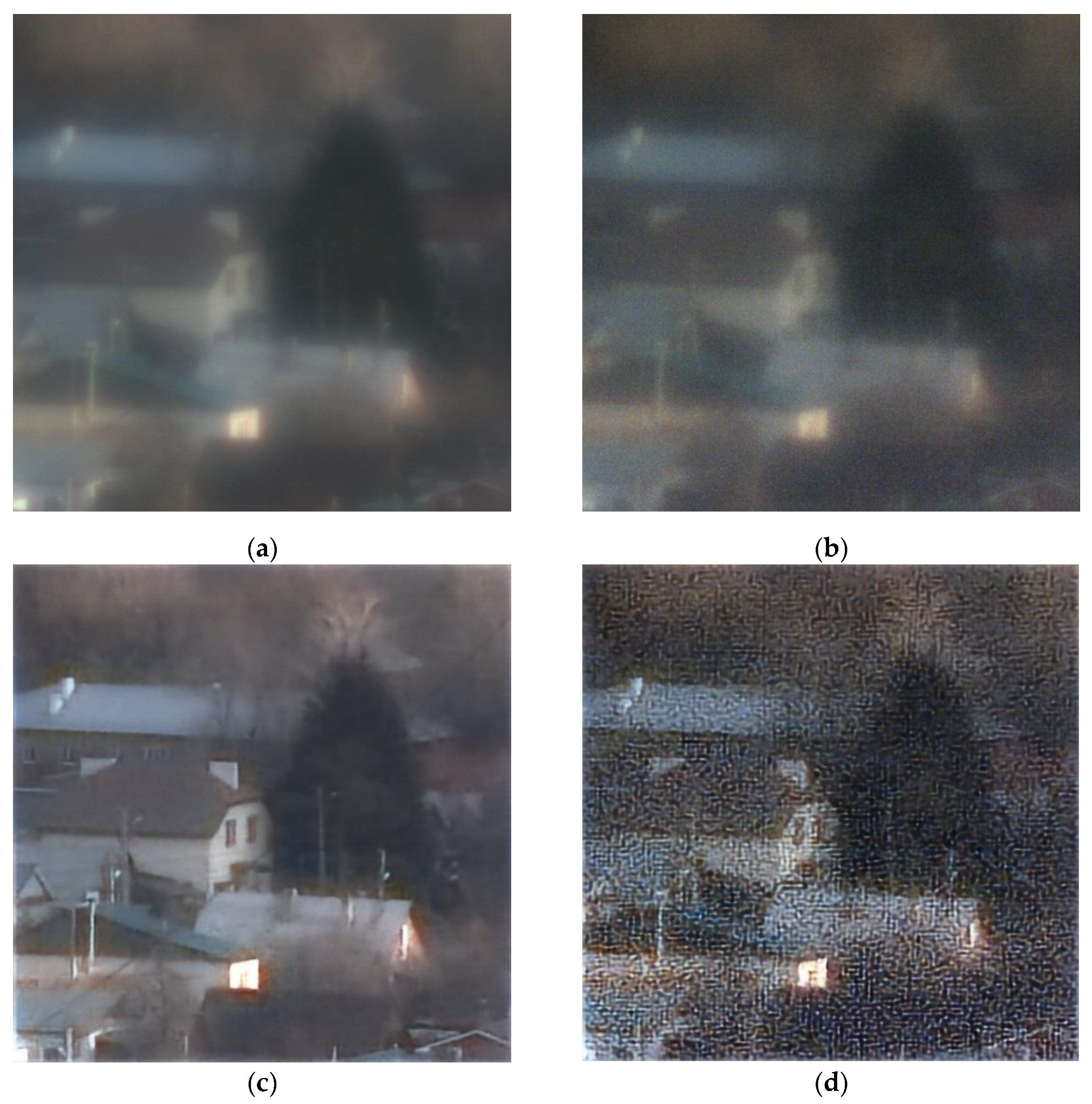
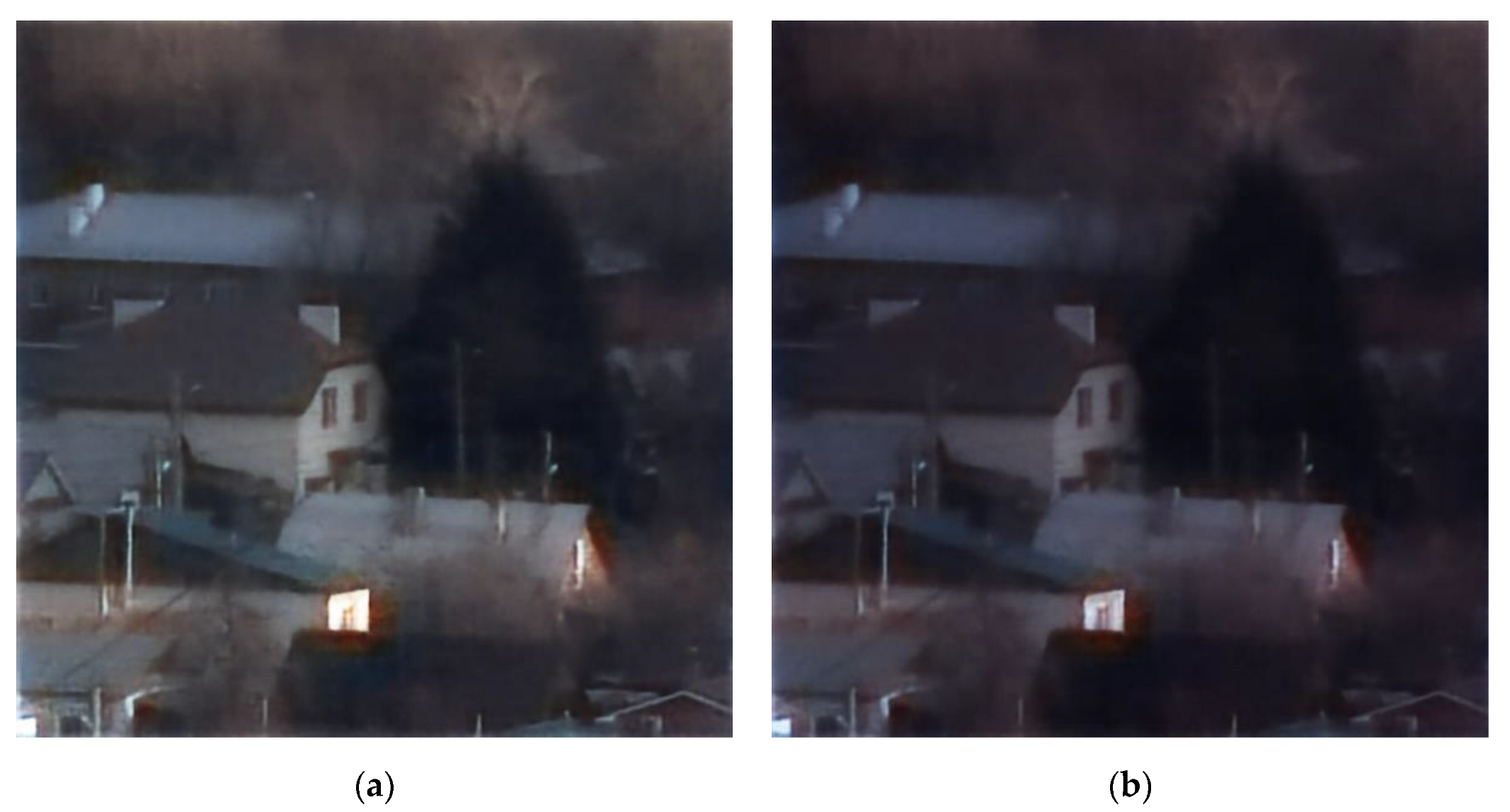
4. Image Reconstruction
4.1. Deconvolution with Nonlinear Regularization
4.2. Deep-Learning-Based Reconstruction
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Reconstructed Image Quality Evaluation




References
- Crusan, J.; Galica, C. NASA’s CubeSat Launch Initiative: Enabling broad access to space. Acta Astronaut. 2019, 157, 51–60. [Google Scholar] [CrossRef]
- Meftah, M.; Boust, F.; Keckhut, P.; Sarkissian, A.; Boutéraon, T.; Bekki, S.; Damé, L.; Galopeau, P.; Hauchecorne, A.; Dufour, C.; et al. INSPIRE-SAT 7, a Second CubeSat to Measure the Earth’s Energy Budget and to Probe the Ionosphere. Remote Sens. 2022, 14, 186. [Google Scholar] [CrossRef]
- Kääb, A.; Altena, B.; Mascaro, J. River-ice and water velocities using the Planet optical cubesat constellation. Hydrol. Earth Syst. Sci. 2019, 23, 4233–4247. [Google Scholar] [CrossRef] [Green Version]
- de Carvalho, R.A.; Estela, J.; Langer, M. Nanosatellites: Space and Ground Technologies, Operations and Economics; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Banerji, S.; Cooke, J.; Sensale-Rodriguez, B. Impact of fabrication errors and refractive index on multilevel diffractive lens performance. Sci. Rep. 2020, 10, 14608. [Google Scholar] [CrossRef]
- Sweeney, D.W.; Sommargren, G.E. Harmonic diffractive lenses. Appl. Opt. 1995, 34, 2469–2475. [Google Scholar] [CrossRef] [PubMed]
- Nikonorov, A.; Skidanov, R.; Fursov, V.; Petrov, M.; Bibikov, S.; Yuzifovich, Y. Fresnel lens imaging with post-capture image processing. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Boston, MA, USA, 7–12 June 2015; pp. 33–41. [Google Scholar]
- Peng, Y.; Fu, Q.; Amata, H.; Su, S.; Heide, F.; Heidrich, W. Computational imaging using lightweight diffractive-refractive optics. Opt. Express 2015, 23, 31393–31407. [Google Scholar] [CrossRef] [Green Version]
- Nikonorov, A.V.; Petrov, M.V.; Bibikov, S.A.; Kutikova, V.V.; Morozov, A.A.; Kazanskiy, N.L. Image restoration in diffractive optical systems using deep learning and deconvolution. Comput. Opt. 2017, 41, 875–887. [Google Scholar] [CrossRef] [Green Version]
- Nikonorov, A.V.; Petrov, M.V.; Bibikov, S.A.; Yakimov, P.Y.; Kutikova, V.V.; Yuzifovich, Y.V.; Morozov, A.A.; Skidanov, R.V.; Kazanskiy, N.L. Toward Ultralightweight Remote Sensing with Harmonic Lenses and Convolutional Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3338–3348. [Google Scholar] [CrossRef]
- Kazanskiy, N.L.; Skidanov, R.V.; Nikonorov, A.V.; Doskolovich, L.L. Intelligent video systems for unmanned aerial vehicles based on diffractive optics and deep learning. Proc. SPIE 2019, 11516, 115161Q. [Google Scholar]
- Evdokimova, V.V.; Petrov, M.V.; Klyueva, M.A.; Zybin, E.Y.; Kosianchuk, V.V.; Mishchenko, I.B.; Novikov, V.M.; Selvesiuk, N.I.; Ershov, E.I.; Ivliev, N.A.; et al. Deep learning-based video stream reconstruction in mass production diffractive optical systems. Comput. Opt. 2021, 45, 130–141. [Google Scholar] [CrossRef]
- Peng, Y.; Sun, Q.; Dun, X.; Wetzstein, G.; Heide, F. Learned Large Field-of-View Imaging with Thin-Plate Optics. ACM Trans. Graph. 2019, 38, 219. [Google Scholar] [CrossRef] [Green Version]
- Atcheson, P.D.; Stewart, C.; Domber, J.; Whiteaker, K.; Cole, J.; Spuhler, P.; Seltzer, A.; Britten, J.A.; Dixit, S.N.; Farmer, B.; et al. MOIRE: Initial demonstration of a transmissive diffractive membrane optic for large lightweight optical telescopes. In Space Telescopes and Instrumentation: Optical, Infrared, and Millimeter Wave, Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Amsterdam, The Netherlands, 1–6 July 2012; International Society for Optics and Photonics: Bellingham, WA, USA, 2012; Volume 8442. [Google Scholar]
- Atcheson, P.; Domber, J.; Whiteaker, K.; Britten, J.A.; Dixit, S.N.; Farmer, B. MOIRE–ground demonstration of a large aperture diffractive transmissive telescope. In Space Telescopes and Instrumentation: Optical, Infrared, and Millimeter Wave, Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Montreal, QC, Canada, 22–27 June 2014; International Society for Optics and Photonics: Bellingham, WA, USA, 2014; Volume 9143. [Google Scholar]
- Breakthrough—Starshot Project Page, Dedicated to Creating Picosatellite Camera. Available online: https://breakthroughinitiatives.org/forum/18?page=3 (accessed on 17 January 2022).
- Guo, C.; Zhang, Z.; Xue, D.; Li, L.; Wang, R.; Zhou, X.; Zhang, F.; Zhang, X. High-performance etching of multilevel phase-type Fresnel zone plates with large apertures. Opt. Commun. 2018, 407, 227–233. [Google Scholar] [CrossRef]
- Apai, D.; Milster, T.D.; Kim, D.W.; Bixel, A.; Schneider, G.; Liang, R.; Arenberg, J. A thousand earths: A very large aperture, ultralight space telescope array for atmospheric biosignature surveys. Astron. J. 2019, 158, 83. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, X.; Liu, H.; Lu, Z.F.; Lu, Z.W. Development of space-based diffractive telescopes. Front. Inform. Technol. Electron. Eng. 2020, 21, 884–902. [Google Scholar] [CrossRef]
- Yang, W.; Wu, S.; Wang, L.; Fan, B.; Luo, X.; Yang, H. Research advances and key technologies of macrostructure membrane telescope. Opto-Electron. Eng. 2017, 44, 475–482. [Google Scholar]
- Tuthill, P.; Bendek, E.; Guyon, O.; Horton, A.; Jeffries, B.; Jovanovic, N.; Klupar, P.; Larkin, K.; Norris, B.; Pope, B.; et al. The TOLIMAN space telescope. In Optical and Infrared Interferometry and Imaging IV, Proceedings of the Society of Photo-Optical Instrumentation Engineers (SPIE) Astronomical Telescopes + Instrumentation, Austin, TX, USA, 10–15 June 2018; SPIE: Bellingham, WA, USA, 2018; Volume 10701. [Google Scholar]
- Cubesat Nanosatellite Platform Line by Sputnix LLC. 2020. Available online: https://sputnix.ru/tpl/docs/SPUTNIX-Cubesat%20platforms-eng.pdf (accessed on 30 November 2021).
- Eliseev, А.N.; Zharenov, I.S.; Zharkikh, R.N.; Purikov, А. Satellite Innovative Space Systems, Assembled Satellite—Demonstration & Training Model. V.RF Patent No. 269722 IPC7B64G 1/10, G09B 9/00. 2017139875, 16 November 2017–16 May 2019.
- Lovera, M. Magnetic satellite detumbling: The b-dot algorithm revisited. In Proceedings of the 2015 IEEE American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 1782–1867. [Google Scholar]
- A Line of Nanosatellite Platforms in the Cubesat Format by Sputnix. Available online: https://sputnix.ru/tpl/docs/SPUTNIX-Cubesat%20platforms-rus.pdf (accessed on 30 November 2021).
- Sputnix Equipment. Available online: https://sputnix.ru/en/equipment/cubesat-devices/motherboard (accessed on 22 November 2021).
- Basler acA1920-40uc USB 3.0 Camera. Available online: https://www.baslerweb.com/en/products/cameras/area-scan-cameras/ace/aca1920-40uc/ (accessed on 22 November 2021).
- Basler daA1600-60uc USB 3.0 Camera. Available online: https://www.baslerweb.com/en/products/cameras/area-scan-cameras/dart/daa1600-60uc-cs-mount/ (accessed on 22 November 2021).
- Recommended USB 2.0 Host Controllers for Basler Dart and Pulse Cameras. Available online: https://www.baslerweb.com/en/sales-support/downloads/document-downloads/usb-2-0-host-controllers-for-dart-and-pulse-cameras/ (accessed on 22 November 2021).
- EMVA Data Overview. Available online: https://www.baslerweb.com/en/sales-support/downloads/document-downloads/emva-data-overview/ (accessed on 22 November 2021).
- Greisukh, G.I.; Efimenko, I.M.; Stepanov, S.A. Principles of designing projection and focusing optical systems with diffractive elements. Comput. Opt. 1987, 1, 114–116. [Google Scholar]
- Greisukh, G.I.; Ezhov, E.G.; Stepanov, S.A. Aberration properties and performance of a new diffractive-gradient-index high-resolution objective. Appl. Opt. 2001, 40, 2730–2735. [Google Scholar] [CrossRef]
- Missig, M.D.; Morris, G.M. Diffractive optics applied to eyepiece design. Appl. Opt. 1995, 34, 2452. [Google Scholar] [CrossRef] [Green Version]
- Knapp, W.; Blough, G.; Khajurivala, K.; Michaels, R.; Tatian, B.; Volk, B. Optical design comparison of 60 degrees eyepieces:one with a diffractive surface and one with aspherics. Appl. Opt. 1997, 36, 4756–4760. [Google Scholar] [CrossRef]
- Yun, Z.; Lam, Y.; Zhou, Y.; Yuan, X.; Zhao, L.; Liu, J. Eyepiece design with refractive-diffractive hybrid elements. Proc. SPIE 2000, 409, 474–480. [Google Scholar]
- Stone, T.W.; George, N. Hybrid Diffractive-Refractive Lenses and Achromats. Appl. Opt. 1988, 27, 2960–2971. [Google Scholar] [CrossRef]
- Zapata-Rodrıiguez, C.J.; Martinez-Corral, M.; Andres, P.; Pons, A. Axial behavior of diffractive lenses under Gaussian illumination: Complex-argument spectral analysis. J. Opt. Soc. Am. A 1999, 16, 2532–2538. [Google Scholar] [CrossRef] [Green Version]
- Khonina, S.N.; Ustinov, A.V.; Skidanov, R.V. A binary lens: Study of local foci. Comput. Opt. 2011, 35, 339–346. [Google Scholar]
- Faklis, D.; Morris, G.M. Spectral properties of multiorder diffractive lenses. Appl. Opt. 1995, 34, 2462–2468. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moreno, V.; Roman, J.F.; Salgueiro, J.R. High efficiency diffractive lenses: Deduction of kinoform profile. Am. J. Phys. 1997, 65, 556–562. [Google Scholar] [CrossRef]
- Faklis, D.; Morris, G.M. Diffractive lenses in broadbandoptical system design. Photon. Spectra 1991, 251122, 131–134. [Google Scholar]
- Buralli, D.A.; Morris, G.M. Design of diffractive singlets for monochromatic imaging. Appl. Opt. 1991, 30, 2151–2158. [Google Scholar] [CrossRef] [Green Version]
- Falkis, D.; Morris, G.M. Broadband Imaging with Holographic Lenses. Opt. Eng. 1989, 28, 592–598. [Google Scholar]
- Khonina, S.N.; Ustinov, A.V.; Skidanov, R.V.; Morozov, A.A. A comparative study of spectral properties of aspheric lenses. Comput. Opt. 2015, 39, 363–369. [Google Scholar] [CrossRef]
- Verkhoglyad, A.G.; Zavyalova, M.A.; Kastorskiy, L.B.; Kachkin, A.E.; Kokarev, S.A.; Korol’kov, V.P.; Moiseev, O.Y.; Poleschyuk, A.G.; Shimanskiy, R.V. A circular laser writing system for synthesizing DOEs in spherical surfaces. Inter-Expo Geo-Sib. 2015, 5, 62–68. [Google Scholar]
- Skidanov, R.V.; Ganchevskaya, S.V.; Vasiliev, V.S.; Blank, V.A. Systems of generalized harmonic lenses for image formation. J. Opt. Technol. 2022, 89, 25–32. [Google Scholar]
- Arguello, H.; Pinilla, S.; Peng, Y.; Ikoma, H.; Bacca, J.; Wetzstein, G. Shift-variant color-coded diffractive spectral imaging system. Optica 2021, 18, 1424–1434. [Google Scholar] [CrossRef]
- Nikonorov, A.; Evdokimova, V.; Petrov, M.; Yakimov, P.; Bibikov, S.; Yuzifovich, Y.; Skidanov, R.; Kazanskiy, N. Deep learning-based imaging using single-lens and multi-aperture diffractive optical systems. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Korea, 27–28 October 2019; pp. 3969–3977. [Google Scholar]
- Heide, F.; Rouf, M.; Hullin, M.B.; Labitzke, B.; Heidrich, W.; Kolb, A. High-Quality Computational Imaging through Simple Lenses. ACM Trans. Graph. 2013, 32, 149. [Google Scholar] [CrossRef]
- Nikonorov, A.; Petrov, M.; Bibikov, S.; Yuzifovich, Y.; Yakimov, P.; Kazanskiy, N.; Skidanov, R.; Fursov, V. Comparative Evaluation of Deblurring Techniques for Fresnel Lens Computational Imaging. In Proceedings of the 2016 23rd IEEE International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; pp. 775–780. [Google Scholar]
- Chakrabarti, A.; Zickler, T. Fast Deconvolution with Color Constraints on Gradients; Technical Report TR-06-12; Computer Science Group, Harvard University: Cambridge, MA, USA, 2012. [Google Scholar]
- Zenytsa Github Repository. Available online: https://github.com/zenytsa/space_images (accessed on 22 November 2021).
- Nikonorov, A.; Kolsanov, A.; Petrov, M.; Yuzifovich, Y.; Prilepin, E.; Chaplygin, S.; Zelter, P.; Bychenkov, K. Vessel segmentation for noisy CT data with quality measure based on single-point contrast-to-noise ratio. Commun. Comput. Inf. Sci. 2016, 585, 490–507. [Google Scholar]
- Choi, J.H.; Zhang, H.; Kim, J.H.; Hsieh, C.J.; Lee, J.S. Evaluating robustness of deep image super-resolution against adversarial attacks. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 303–311. [Google Scholar]
- Skidanov, R.; Strelkov, Y.; Volotovsky, S.; Blank, V.; Podlipnov, V.; Ivliev, N.; Kazanskiy, N.; Ganchevskaya, S. Compact imaging systems based on annular harmonic lenses. Sensors 2020, 20, 3914. [Google Scholar] [CrossRef] [PubMed]
- Finlayson, G.D.; Mackiewicz, M.; Hurlbert, A. Colour correction using root-polynomial regression. IEEE Trans. Image Proc. 2015, 24, 1460–1470. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sony IMX249 | e2V EV76C570 | |
|---|---|---|
| Quantum efficiency, % | 70 | 47 |
| Temporal dark noise, e | 7 | 22 |
| Dynamic range, dB | 74 | 50 |
| Signal to noise ratio, dB | 45 | 38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivliev, N.; Evdokimova, V.; Podlipnov, V.; Petrov, M.; Ganchevskaya, S.; Tkachenko, I.; Abrameshin, D.; Yuzifovich, Y.; Nikonorov, A.; Skidanov, R.; et al. First Earth-Imaging CubeSat with Harmonic Diffractive Lens. Remote Sens. 2022, 14, 2230. https://doi.org/10.3390/rs14092230
Ivliev N, Evdokimova V, Podlipnov V, Petrov M, Ganchevskaya S, Tkachenko I, Abrameshin D, Yuzifovich Y, Nikonorov A, Skidanov R, et al. First Earth-Imaging CubeSat with Harmonic Diffractive Lens. Remote Sensing. 2022; 14(9):2230. https://doi.org/10.3390/rs14092230
Chicago/Turabian StyleIvliev, Nikolay, Viktoria Evdokimova, Vladimir Podlipnov, Maxim Petrov, Sofiya Ganchevskaya, Ivan Tkachenko, Dmitry Abrameshin, Yuri Yuzifovich, Artem Nikonorov, Roman Skidanov, and et al. 2022. "First Earth-Imaging CubeSat with Harmonic Diffractive Lens" Remote Sensing 14, no. 9: 2230. https://doi.org/10.3390/rs14092230
APA StyleIvliev, N., Evdokimova, V., Podlipnov, V., Petrov, M., Ganchevskaya, S., Tkachenko, I., Abrameshin, D., Yuzifovich, Y., Nikonorov, A., Skidanov, R., Kazanskiy, N., & Soifer, V. (2022). First Earth-Imaging CubeSat with Harmonic Diffractive Lens. Remote Sensing, 14(9), 2230. https://doi.org/10.3390/rs14092230