
Estimating Ground Elevation in Coastal Dunes from High-Resolution UAV-LIDAR Point Clouds and Photogrammetry


Abstract
:1. Introduction
2. Materials and Methods
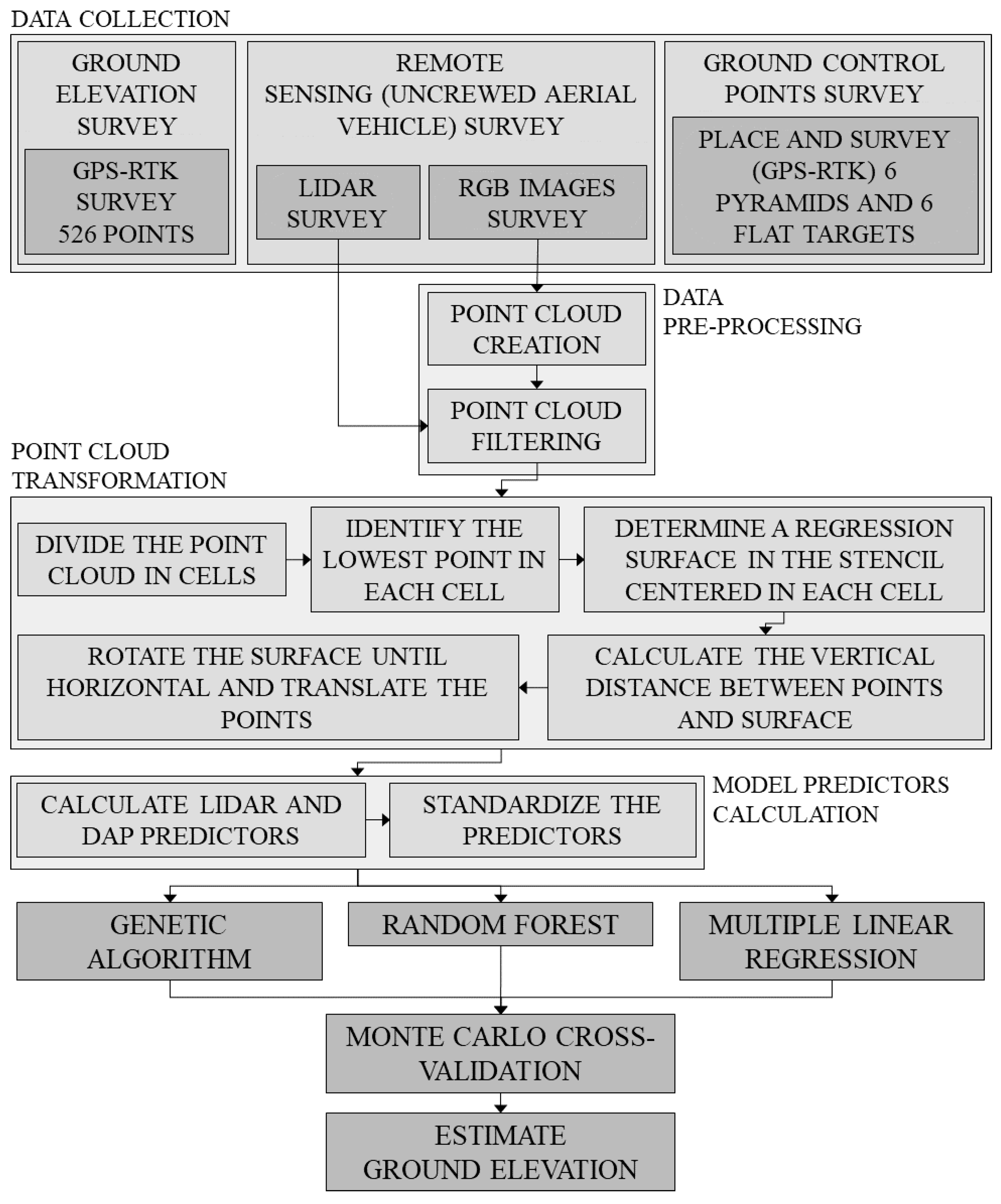
- STEP 1.
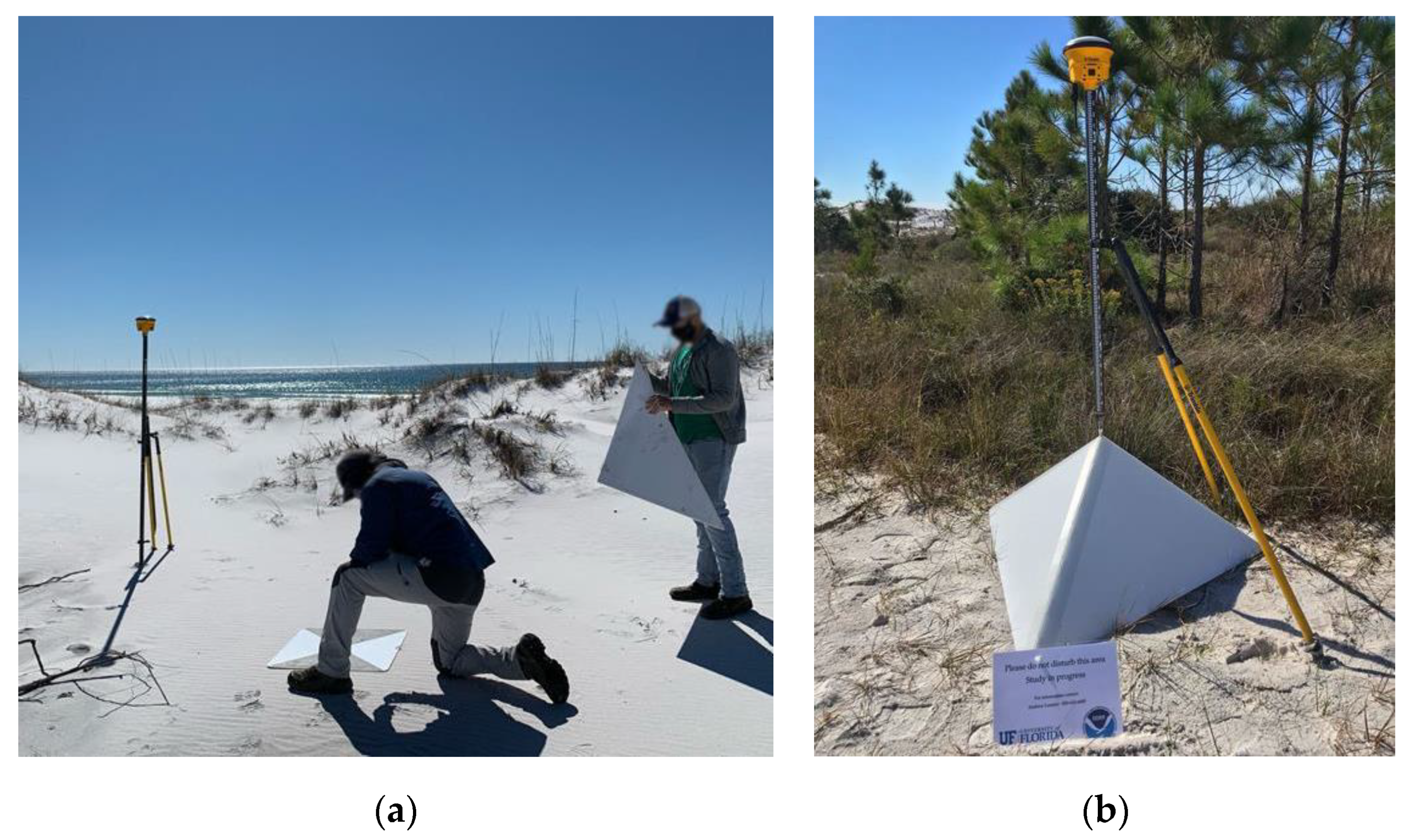
- We performed a ground elevation survey on the field, by using a GNSS rover, to collect ground-truth data over our study domain (Section 2.2).
- STEP 2.
- We used a UAS to collect a high-resolution LIDAR point cloud and high-resolution RGB images over our study domain (Section 2.3). We then calculated a DAP point cloud from the high-resolution images.
- STEP 3.
- We transformed the UAV–LIDAR and UAV–DAP point clouds by using the method developed by [21] to remove the effect of the ground slope on the ground elevation estimate (Section 2.4.2).
- STEP 4.
- We trained and tested three different regression techniques, a multiple linear regression, a genetic algorithm, and a random forest, to estimate the ground elevation from the transformed and the original point cloud (Section 2.6). To train and test each technique, we performed a Monte Carlo cross-validation.
2.1. Study Site
2.2. Field Measurements
2.3. Remote Sensing Measurements
2.3.1. LIDAR Dataset
2.3.2. Imagery Dataset
2.4. Ground Elevation Estimation
2.4.1. Point Clouds Filtering
2.4.2. Point Cloud Transformation and Sloping Ground
2.4.3. Model Predictors
- The number of points of the point cloud contained in , .
- The maximum elevation of the points in , :
- The minimum elevation of the points in , :
- The elevation range of the points in , :
- The mean elevation of the points in , :
- The mean elevation range of the points in , :
- The standard deviation of the elevation of the points in , :
- The skewness of the elevation of the points in , :
- The kurtosis of the elevation of the points in , :
- The mode elevation of the points in , . To calculate it, we divided the point cloud into six equivalent vertical layers, and we identified the mode as the average elevation of the layer containing the highest number of points.
- The median elevation of the points in , . The value separates the higher and the lower halves of the points in . The value is unique if is an odd number. For even , there are two middle elevation values. We consider equal to their average.
- The ground slope in , . The value is calculated as the maximum slope of the regression plane based on the minimum elevations identified in the 9 cells constituting the (see Section 2.4.2 and Supplementary Materials).
2.5. Regression Techniques
2.5.1. Multiple Linear Regression
2.5.2. Genetic Algorithm
2.5.3. Random Forest Algorithm
2.6. Training, Validation, and Testing of the Regression Techniques
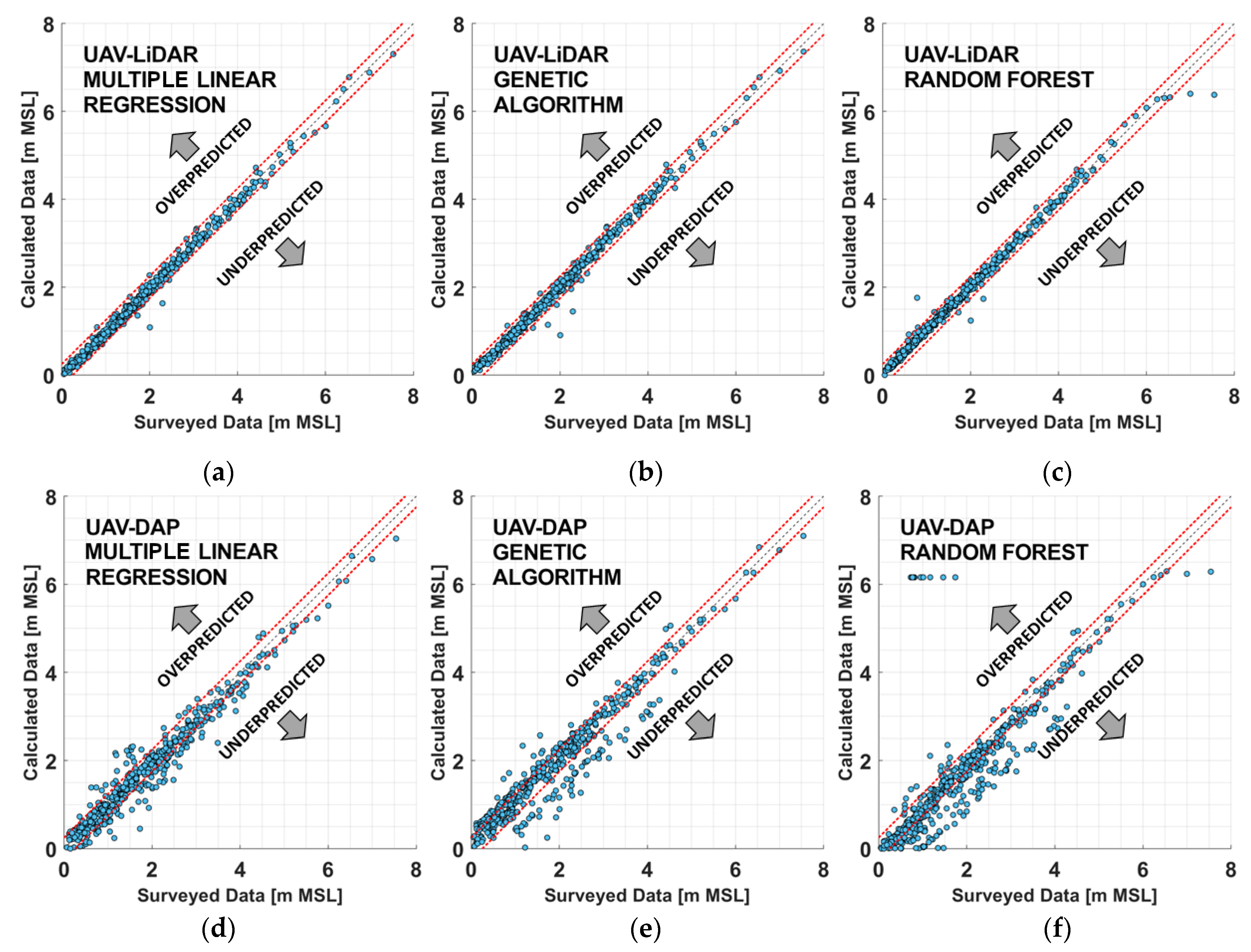
2.7. Error Analysis
3. Results
3.1. Effect of Predictors Subsets on MLR Performance
3.2. Ground Elevation Estimate
3.3. Regression Formulas to Estimate Ground Elevation
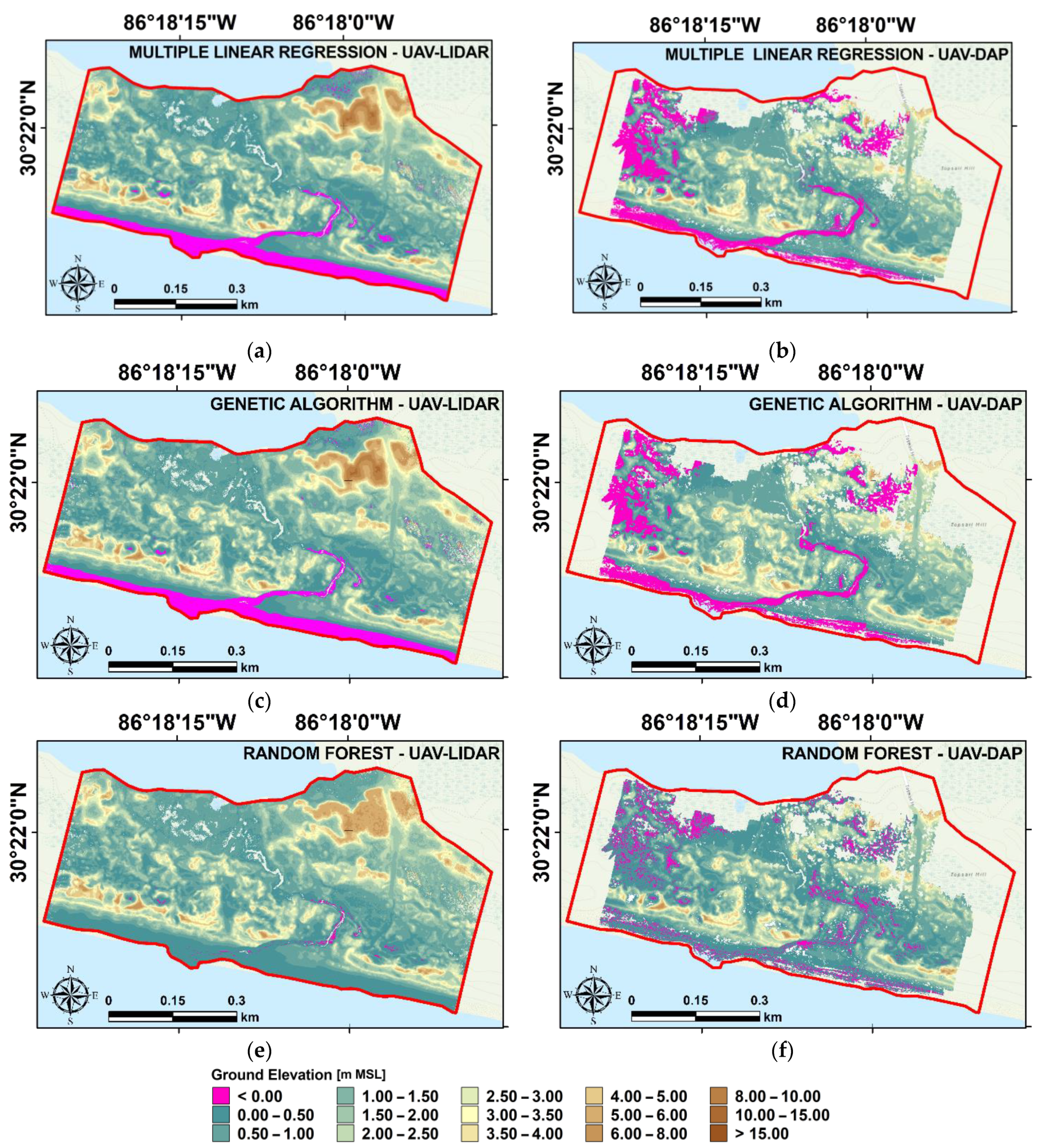
3.4. Ground Elevation Maps
4. Discussion
4.1. High-Resolution MAPS
4.2. Ground Elevation Estimates
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Houser, C.; Hapke, C.; Hamilton, S. Controls on coastal dune morphology, shoreline erosion and barrier island response to extreme storms. Geomorphology 2008, 100, 223–240. [Google Scholar] [CrossRef]
- McLachlan, A. Ecology of coastal dune fauna. J. Arid Environ. 1991, 21, 229–243. [Google Scholar] [CrossRef]
- Maes, D.; Ghesquiere, A.; Logie, M.; Bonte, D. Habitat use and mobility of two threatened coastal dune insects: Implications for conservation. J. Insect Conserv. 2006, 10, 105–115. [Google Scholar] [CrossRef]
- Sytnik, O.; Stecchi, F. Disappearing coastal dunes: Tourism development and future challenges, a case-study from Ravenna, Italy. J. Coast. Conserv. 2015, 19, 715–727. [Google Scholar] [CrossRef]
- Martínez, M.L.; Psuty, N.P.; Lubke, R.A. A Perspective on Coastal Dunes. In Coastal Dunes. Ecological Studies; Springer: Berlin/Heidelberg, Germany, 2008; pp. 3–10. [Google Scholar] [CrossRef]
- Li, W.; Gong, P. Continuous monitoring of coastline dynamics in western Florida with a 30-year time series of Landsat imagery. Remote Sens. Environ. 2016, 179, 196–209. [Google Scholar] [CrossRef]
- Saye, S.E.; Pye, K. Implications of sea level rise for coastal dune habitat conservation in Wales, UK. J. Coast. Conserv. 2007, 11, 31–52. [Google Scholar] [CrossRef]
- Hernández-Cordero, A.I.; Hernández-Calvento, L.; Hesp, P.A.; Pérez-Chacón, E. Geomorphological changes in an arid transgressive coastal dune field due to natural processes and human impacts. Earth Surf. Process. Landf. 2018, 43, 2167–2180. [Google Scholar] [CrossRef]
- Church, J.A.; Clark, P.U.; Cazenave, A.; Gregory, J.M.; Jevrejeva, S.; Levermann, A.; Merrifield, M.A.; Milne, G.A.; Nerem, R.S.; Nunn, P.D.; et al. Sea Level Change. Climate Change 2013: The Physical Science Basis; Contribution of working group I to the fifth assessment report of the intergovernmental panel on climate change; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013; pp. 1137–1216. [Google Scholar]
- Morton, R.A.; Paine, J.G. Beaches and vegetation-line changes at Galveston Island, Texas: Erosion, deposition, and recovery from Hurricane Alicia. Bur. Econ. Geol. Geol. Circ. 1985, 85, 1–43. [Google Scholar]
- Dissanayake, P.; Brown, J.; Karunarathna, H. Modelling storm-induced beach/dune evolution: Sefton coast, Liverpool Bay, UK. Mar. Geol. 2014, 357, 225–242. [Google Scholar] [CrossRef] [Green Version]
- Cohn, N.; Hoonhout, B.M.; Goldstein, E.B.; de Vries, S.; Moore, L.J.; Vinent, O.D.; Ruggiero, P. Exploring marine and aeolian controls on coastal foredune growth using a coupled numerical model. J. Mar. Sci. Eng. 2019, 7, 13. [Google Scholar] [CrossRef]
- Gross, M.F.; Hardisky, M.A.; Klemas, V. Applications to coastal wetlands vegetation. In Theory and Applications of Optical Remote Sensing; John Wiley & Sons: New York, NY, USA, 1989; pp. 474–490. [Google Scholar]
- Pinton, D.; Canestrelli, A.; Fantuzzi, L. A UAV-based dye-tracking technique to measure surface velocities over tidal channels and salt marshes. J. Mar. Sci. Eng. 2020, 8, 364. [Google Scholar] [CrossRef]
- Hartley, R.J.L.; Leonardo, E.M.; Massam, P.; Watt, M.S.; Estarija, H.J.; Wright, L.; Melia, N.; Pearse, G.D. An assessment of high-density UAV point clouds for the measurement of young forestry trials. Remote Sens. 2020, 12, 4039. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Z.; Yu, H.; Li, F. Mapping Spartina alterniflora biomass using LiDAR and hyperspectral data. Remote Sens. 2017, 9, 589. [Google Scholar] [CrossRef] [Green Version]
- Shaw, L.; Helmholz, P.; Belton, D.; Addy, N. Comparison of uav lidar and imagery for beach monitoring. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 589–596. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.C.; Cheng, Y.T.; Zhou, T.; Ravi, R.; Hasheminasab, S.M.; Flatt, J.E.; Troy, C.; Habib, A. Evaluation of UAV LiDAR for mapping coastal environments. Remote Sens. 2019, 11, 2893. [Google Scholar] [CrossRef] [Green Version]
- Elsner, P.; Dornbusch, U.; Thomas, I.; Amos, D.; Bovington, J.; Horn, D. Coincident beach surveys using UAS, vehicle mounted and airborne laser scanner: Point cloud inter-comparison and effects of surface type heterogeneity on elevation accuracies. Remote Sens. Environ. 2018, 208, 15–26. [Google Scholar] [CrossRef]
- Pinton, D.; Canestrelli, A.; Wilkinson, B.; Ifju, P.; Ortega, A. Estimating ground elevation and vegetation characteristics in coastal salt marshes using uav-based lidar and digital aerial photogrammetry. Remote Sens. 2021, 13, 4506. [Google Scholar] [CrossRef]
- Pinton, D.; Canestrelli, A.; Wilkinson, B.; Ifju, P.; Ortega, A. A new algorithm for estimating ground elevation and vegetation characteristics in coastal salt marshes from high-resolution UAV-based LiDAR point clouds. Earth Surf. Process. Landf. 2020, 45, 3687–3701. [Google Scholar] [CrossRef]
- DiGiacomo, A.E.; Bird, C.N.; Pan, V.G.; Dobroski, K.; Atkins-Davis, C.; Johnston, D.W.; Ridge, J.T. Modeling salt marsh vegetation height using unoccupied aircraft systems and structure from motion. Remote Sens. 2020, 12, 2333. [Google Scholar] [CrossRef]
- Wang, D.; Xin, X.; Shao, Q.; Brolly, M.; Zhu, Z.; Chen, J. Modeling aboveground biomass in Hulunber grassland ecosystem by using unmanned aerial vehicle discrete lidar. Sensors 2017, 17, 180. [Google Scholar] [CrossRef]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and digital aerial photogrammetry point clouds for estimating forest structural attributes in subtropical planted forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef] [Green Version]
- Nouwakpo, S.K.; Weltz, M.A.; McGwire, K. Assessing the performance of structure-from-motion photogrammetry and terrestrial LiDAR for reconstructing soil surface microtopography of naturally vegetated plots. Earth Surf. Process. Landf. 2016, 41, 308–322. [Google Scholar] [CrossRef]
- Kalacska, M.; Chmura, G.L.; Lucanus, O.; Bérubé, D.; Arroyo-Mora, J.P. Structure from motion will revolutionize analyses of tidal wetland landscapes. Remote Sens. Environ. 2017, 199, 14–24. [Google Scholar] [CrossRef]
- Gomez, C.; Hayakawa, Y.; Obanawa, H. A study of Japanese landscapes using structure from motion derived DSMs and DEMs based on historical aerial photographs: New opportunities for vegetation monitoring and diachronic geomorphology. Geomorphology 2015, 242, 11–20. [Google Scholar] [CrossRef] [Green Version]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Gay, P. Unsupervised detection of vineyards by 3D point-cloud UAV photogrammetry for precision agriculture. Comput. Electron. Agric. 2018, 155, 84–95. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Brazier, R.E.; Anderson, K. Ultra-fine grain landscape-scale quantification of dryland vegetation structure with drone-acquired structure-from-motion photogrammetry. Remote Sens. Environ. 2016, 183, 129–143. [Google Scholar] [CrossRef] [Green Version]
- Fawcett, D.; Azlan, B.; Hill, T.C.; Kho, L.K.; Bennie, J.; Anderson, K. Unmanned aerial vehicle (UAV) derived structure-from-motion photogrammetry point clouds for oil palm (Elaeis guineensis) canopy segmentation and height estimation. Int. J. Remote Sens. 2019, 40, 7538–7560. [Google Scholar] [CrossRef] [Green Version]
- Casella, E.; Drechsel, J.; Winter, C.; Benninghoff, M.; Rovere, A. Accuracy of sand beach topography surveying by drones and photogrammetry. Geo-Mar. Lett. 2020, 40, 255–268. [Google Scholar] [CrossRef] [Green Version]
- Laporte-Fauret, Q.; Castelle, B.; Marieu, V.; Bujan, S.; Michalet, R.; Rosebery, D. Coastal Dune Morphology Evolution Combining Lidar and UAV Surveys, Truc Vert beach 2011–2019. J. Coast. Res. 2020, 95, 163–167. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Axelsson, P. DEM Generation from Laser Scanner Data Using adaptive TIN Models. Int. Arch. Photogramm. Remote Sens. 2000, 23, 110–117. [Google Scholar]
- Chen, Q.; Gong, P.; Baldocchi, D.; Xie, G. Filtering airborne laser scanning data with morphological methods. Photogramm. Eng. Remote Sens. 2007, 73, 175–185. [Google Scholar] [CrossRef] [Green Version]
- Guisado-Pintado, E.; Jackson, D.W.T.; Rogers, D. 3D mapping efficacy of a drone and terrestrial laser scanner over a temperate beach-dune zone. Geomorphology 2019, 328, 157–172. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- VanTassel, N.M.; Janosik, A.M. A compendium of Coastal Dune Lakes in Northwest Florida. J. Coast. Conserv. 2018, 23, 385–416. [Google Scholar] [CrossRef]
- Miller, D.; Thetford, M.; Verlinde, C.; Campbell, G.; Smith, A. Dune Restoration and Enhancement; Department of Wildlife Ecology and Conservation: Gainesville, FL, USA, 2018. [Google Scholar]
- Wilkinson, B.; Lassiter, H.A.; Abd-Elrahman, A.; Carthy, R.R.; Ifju, P.; Broadbent, E.; Grimes, N. Geometric targets for UAS lidar. Remote Sens. 2019, 11, 3019. [Google Scholar] [CrossRef] [Green Version]
- Madár, J.; Abonyi, J.; Szeifert, F. Genetic programming for the identification of nonlinear input-output models. Ind. Eng. Chem. Res. 2005, 44, 3178–3186. [Google Scholar] [CrossRef]
- Yang, X.-S. Chapter 5 Genetic algorithms. In Advances in Exploration Geophysics; Yang, X.-S., Ed.; Elsevier: Oxford, UK, 1995; Volume 4, pp. 125–158. ISBN 978-0-12-416743-8. [Google Scholar]
- Malczewski, J. Multicriteria Analysis. In Comprehensive Geographic Information Systems; Huang, B., Ed.; Elsevier: Oxford, UK, 2017; Volume 3, pp. 197–217. ISBN 9780128046609. [Google Scholar]
- Buhmann, M.D.; Melville, P.; Sindhwani, V.; Quadrianto, N.; Buntine, W.L.; Torgo, L.; Zhang, X.; Stone, P.; Struyf, J.; Blockeel, H.; et al. Regression Trees. Encyclopedia of Machine Learning; Springer: Boston, MA, USA, 2011; pp. 842–845. [Google Scholar] [CrossRef]
- Durai, P.; Radhakrishnan, N.P.; Bhaskar, A.S. Habitat Based Identification of Foredune and Incipient Foredune by Per Pixel and Sub Pixel Approach, A Case Study from Panaiyur Coast, Tamil Nadu, South India. In Proceedings of the 2019 IEEE Recent Advances in Geoscience and Remote Sensing: Technologies, Standards and Applications (TENGARSS), Kochi, India, 17–20 October 2019; pp. 92–95. [Google Scholar] [CrossRef]
- Avdeef, A. Prediction of aqueous intrinsic solubility of druglike molecules using Random Forest regression trained with Wiki-pS0 database. ADMET DMPK 2020, 8, 29–77. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Predictors | Definition |
|---|---|
| Number of points | |
| Maximum elevation | |
| Minimum elevation | |
| Elevation range | |
| Mean elevation range | |
| Mean elevation | |
| Elevation standard deviation | |
| Elevation skewness | |
| Elevation kurtosis | |
| Mode elevation | |
| Median elevation | |
| Ground slope |
| Pt. Cloud | Transformation | Non-Transformed | Transformed Plane | Transformed Polynomial | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Phase/ Regression | Train | Val | Test | Train | Val | Test | Train | Val | Test | ||
| UAV– LIDAR | MLR | 7.35 | 7.79 | 8.17 | 6.63 | 7.00 | 7.78 | 7.37 | 7.90 | 9.90 | |
| 10.73 | 11.54 | 13.95 | 9.09 | 9.72 | 13.19 | 10.67 | 11.81 | 18.70 | |||
| 0.993 | 0.992 | 0.987 | 0.995 | 0.994 | 0.989 | 0.993 | 0.991 | 0.978 | |||
| GA | 8.77 | 8.93 | 10.07 | 6.74 | 6.83 | 7.64 | 7.95 | 8.08 | 10.53 | ||
| 13.64 | 13.82 | 18.98 | 9.76 | 9.94 | 9.86 | 9.93 | 9.92 | 9.72 | |||
| 0.989 | 0.988 | 0.977 | 0.995 | 0.994 | 0.986 | 0.993 | 0.992 | 0.972 | |||
| RF | - | 11.38 | 11.76 | - | 9.78 | 10.22 | - | 10.32 | 10.80 | ||
| - | 19.70 | 19.11 | - | 17.25 | 17.26 | - | 18.18 | 19.75 | |||
| - | 0.976 | 0.977 | - | 0.981 | 0.981 | - | 0.979 | 0.975 | |||
| UAV– DAP | MLR | 20.13 | 21.67 | 27.08 | 19.98 | 23.16 | 35.77 | 63.43 | 86.18 | 69.01 | |
| 28.87 | 32.23 | 40.56 | 28.59 | 40.29 | 79.28 | 94.00 | 241.72 | 96.97 | |||
| 0.954 | 0.936 | 0.894 | 0.955 | 0.889 | 0.596 | 0.498 | −9.657 | 0.396 | |||
| GA | 25.85 | 26.61 | 33.54 | 31.44 | 34.39 | 43.43 | 79.10 | 89.95 | 108.73 | ||
| 36.38 | 37.37 | 46.49 | 47.65 | 62.73 | 105.21 | 110.94 | 166.30 | 128.41 | |||
| 0.927 | 0.916 | 0.861 | 0.844 | 0.577 | 0.289 | 0.305 | −0.247 | −0.057 | |||
| RF | - | 21.71 | 24.99 | - | 24.52 | 28.32 | - | 25.76 | 27.15 | ||
| - | 30.79 | 35.30 | - | 41.38 | 48.20 | - | 42.66 | 42.79 | |||
| - | 0.944 | 0.920 | - | 0.894 | 0.851 | - | 0.888 | 0.882 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pinton, D.; Canestrelli, A.; Moon, R.; Wilkinson, B. Estimating Ground Elevation in Coastal Dunes from High-Resolution UAV-LIDAR Point Clouds and Photogrammetry. Remote Sens. 2023, 15, 226. https://doi.org/10.3390/rs15010226
Pinton D, Canestrelli A, Moon R, Wilkinson B. Estimating Ground Elevation in Coastal Dunes from High-Resolution UAV-LIDAR Point Clouds and Photogrammetry. Remote Sensing. 2023; 15(1):226. https://doi.org/10.3390/rs15010226
Chicago/Turabian StylePinton, Daniele, Alberto Canestrelli, Robert Moon, and Benjamin Wilkinson. 2023. "Estimating Ground Elevation in Coastal Dunes from High-Resolution UAV-LIDAR Point Clouds and Photogrammetry" Remote Sensing 15, no. 1: 226. https://doi.org/10.3390/rs15010226
APA StylePinton, D., Canestrelli, A., Moon, R., & Wilkinson, B. (2023). Estimating Ground Elevation in Coastal Dunes from High-Resolution UAV-LIDAR Point Clouds and Photogrammetry. Remote Sensing, 15(1), 226. https://doi.org/10.3390/rs15010226