

Water-Quality Monitoring with a UAV-Mounted Multispectral Camera in Coastal Waters

 , , , ,
, , , ,  ,
,  and
and
Abstract
: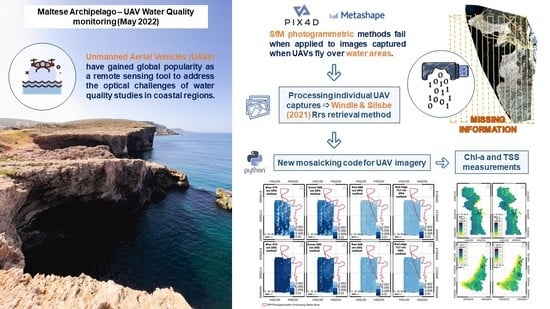
1. Introduction
2. Materials and Methods
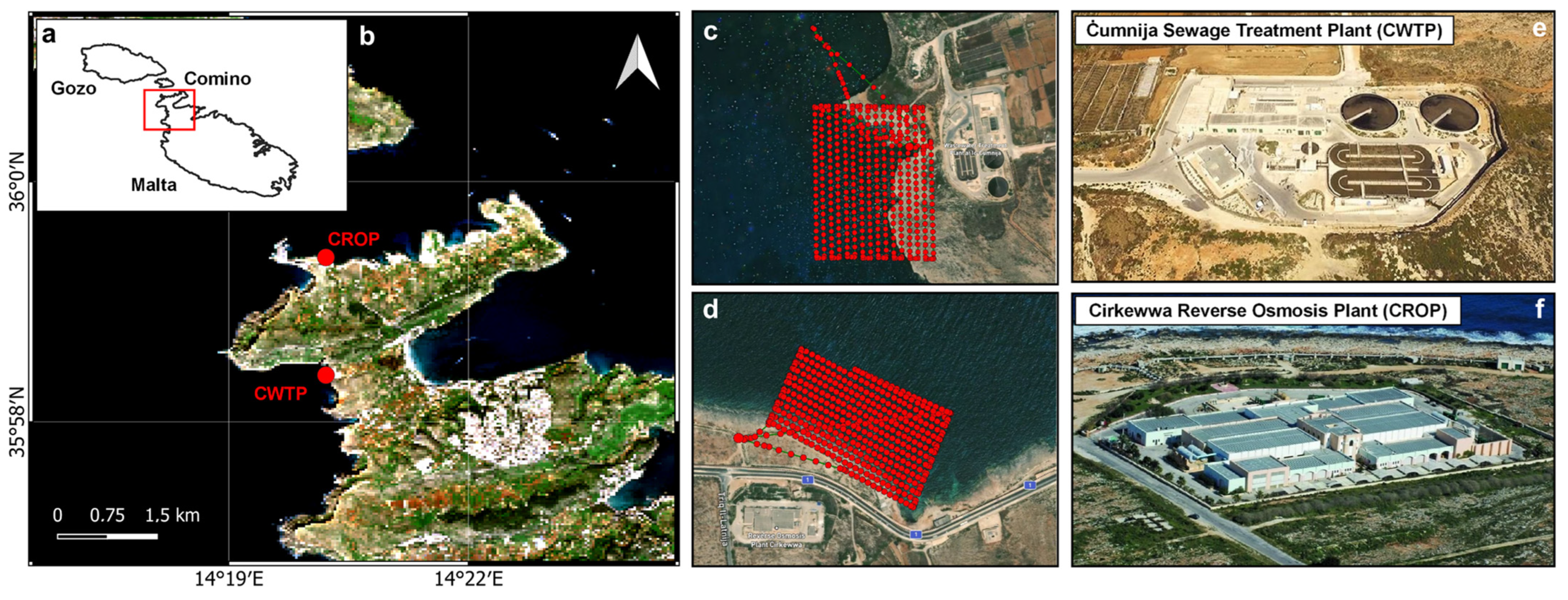
2.1. Study Area
2.2. Sentinel-2 Imagery
2.3. UAV Operations and Data Collection
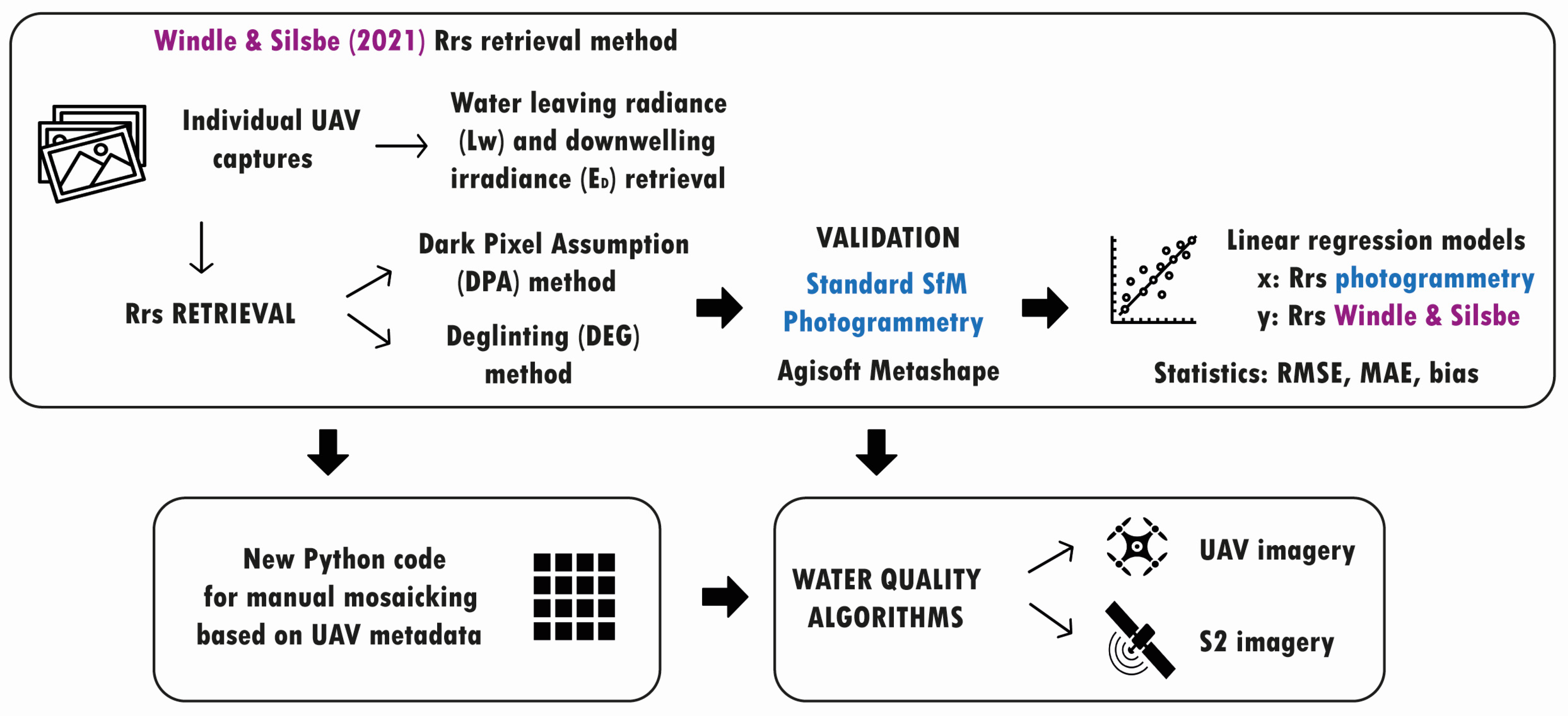
2.4. Data Processing
2.4.1. UAV SfM Photogrammetry
2.4.2. Remote-Sensing Reflectance Retrieval from UAV Individual Captures
2.4.3. Accuracy Assessment
2.4.4. Spectral Comparison
2.5. Chl-a and TSS Algorithms
3. Results
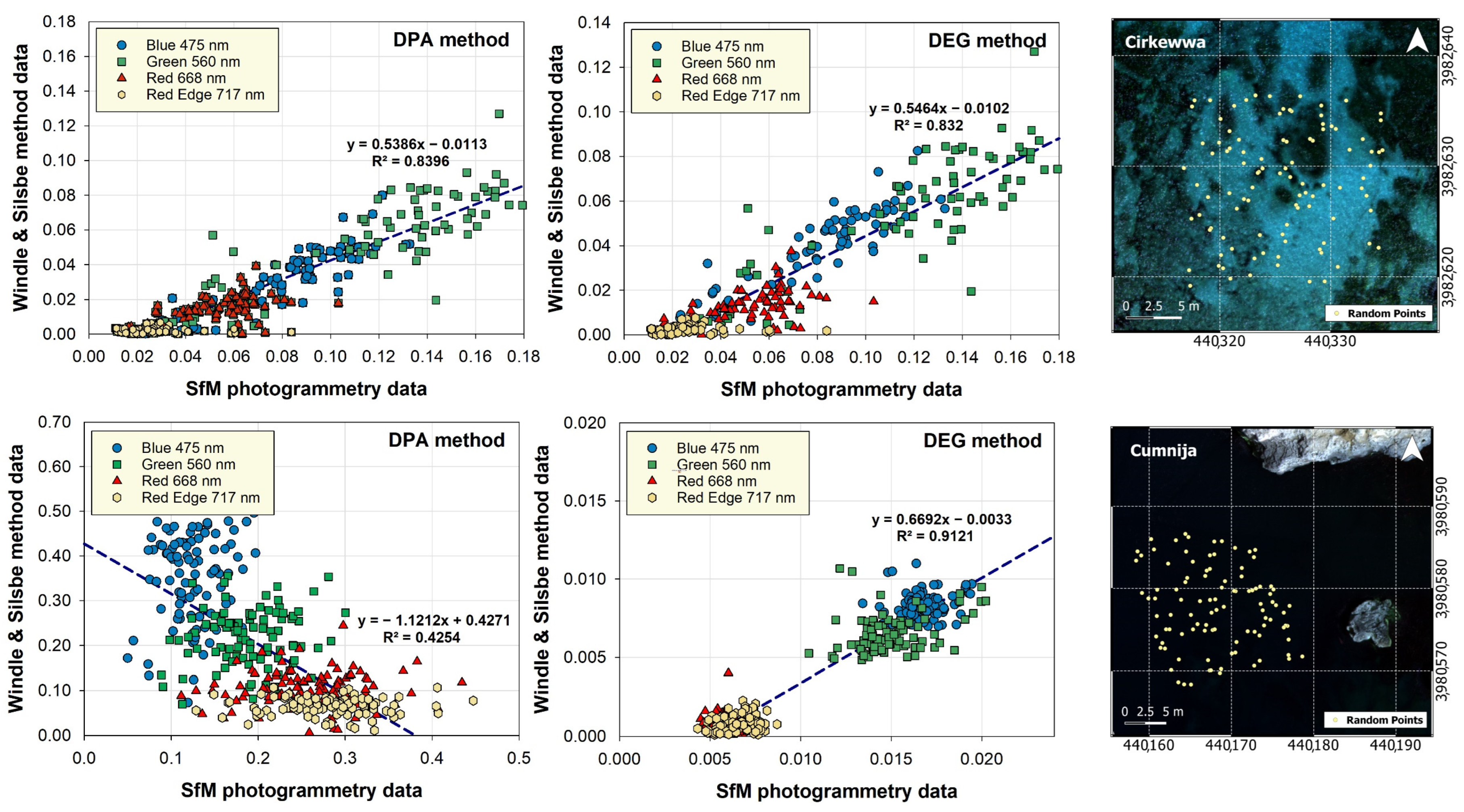
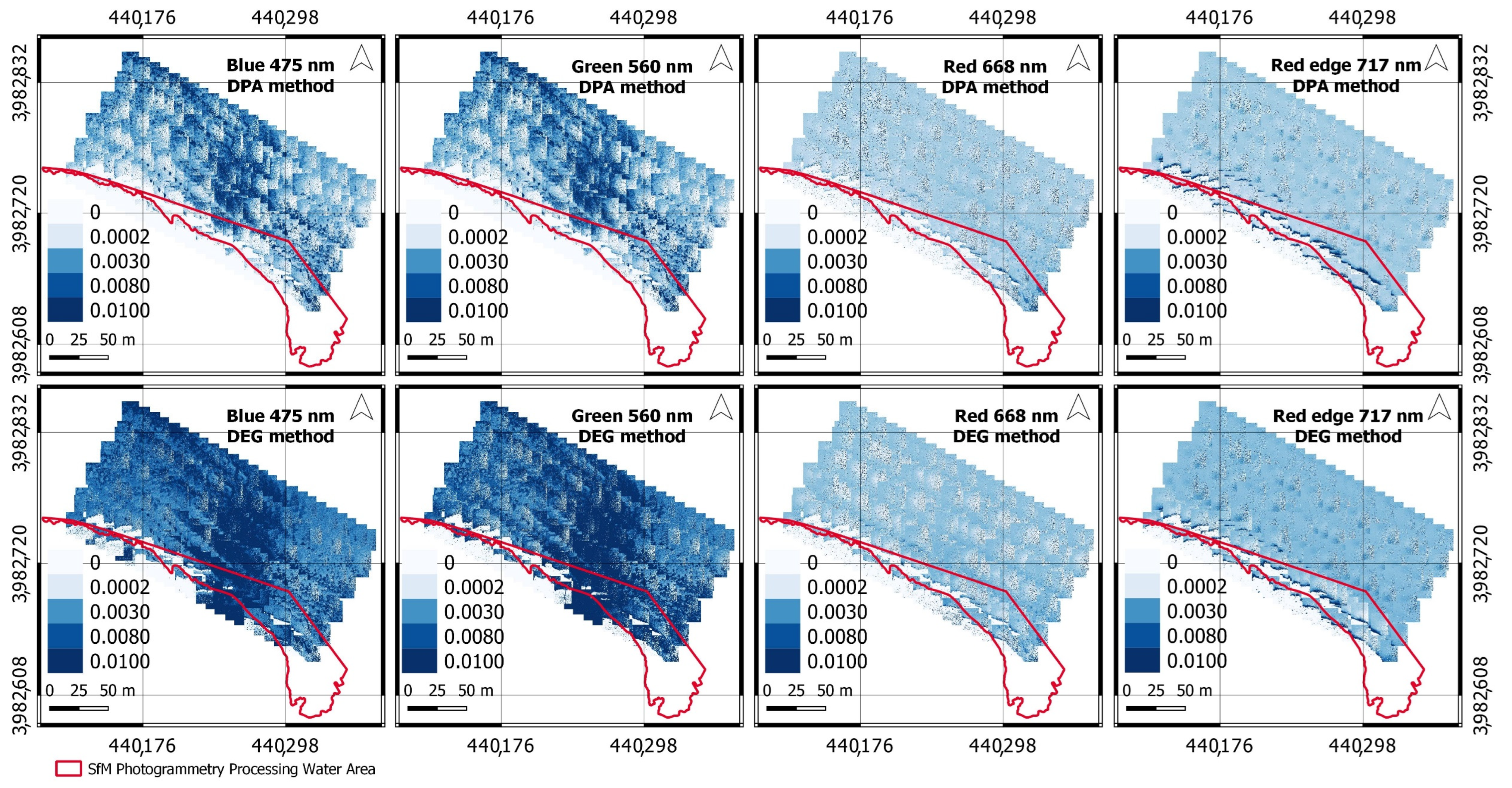
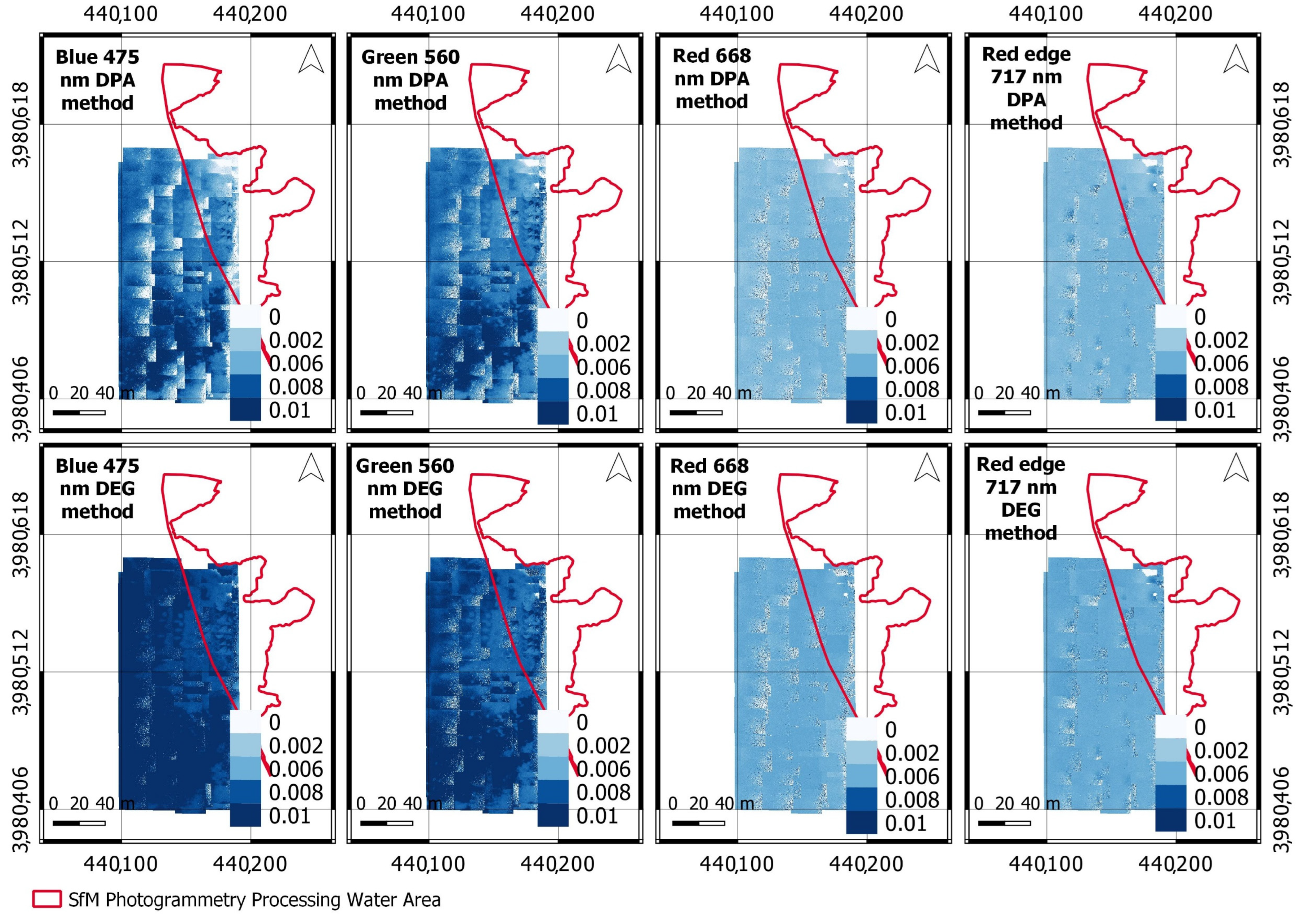
3.1. Comparison of the Rrs Retrieval Methods from Individual UAV Captures
3.2. Novel UAV Water-Mosaicking Method: Python Workflow
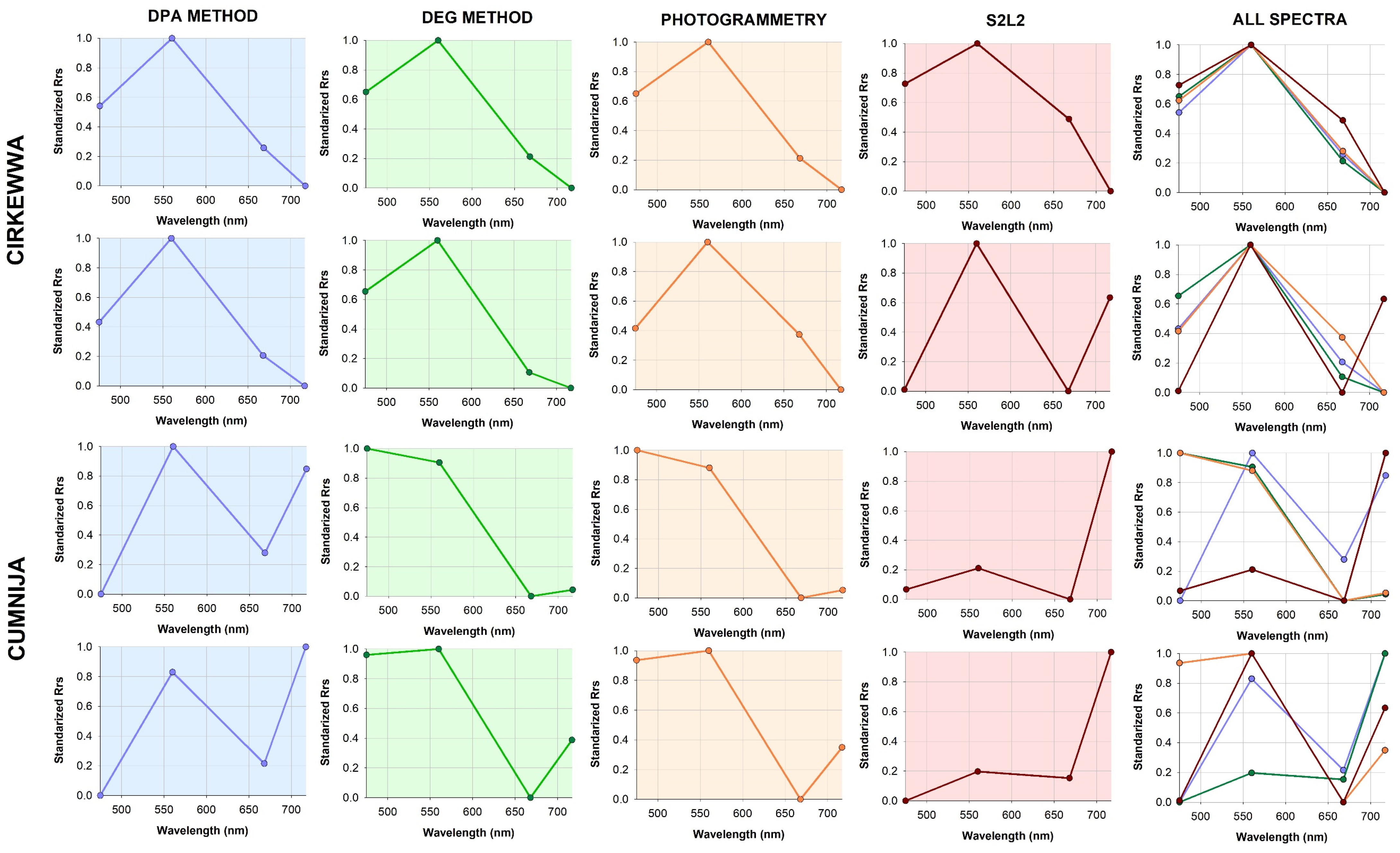
3.3. Spectral Shape Comparison: UAV and Sentinel-2 Imagery
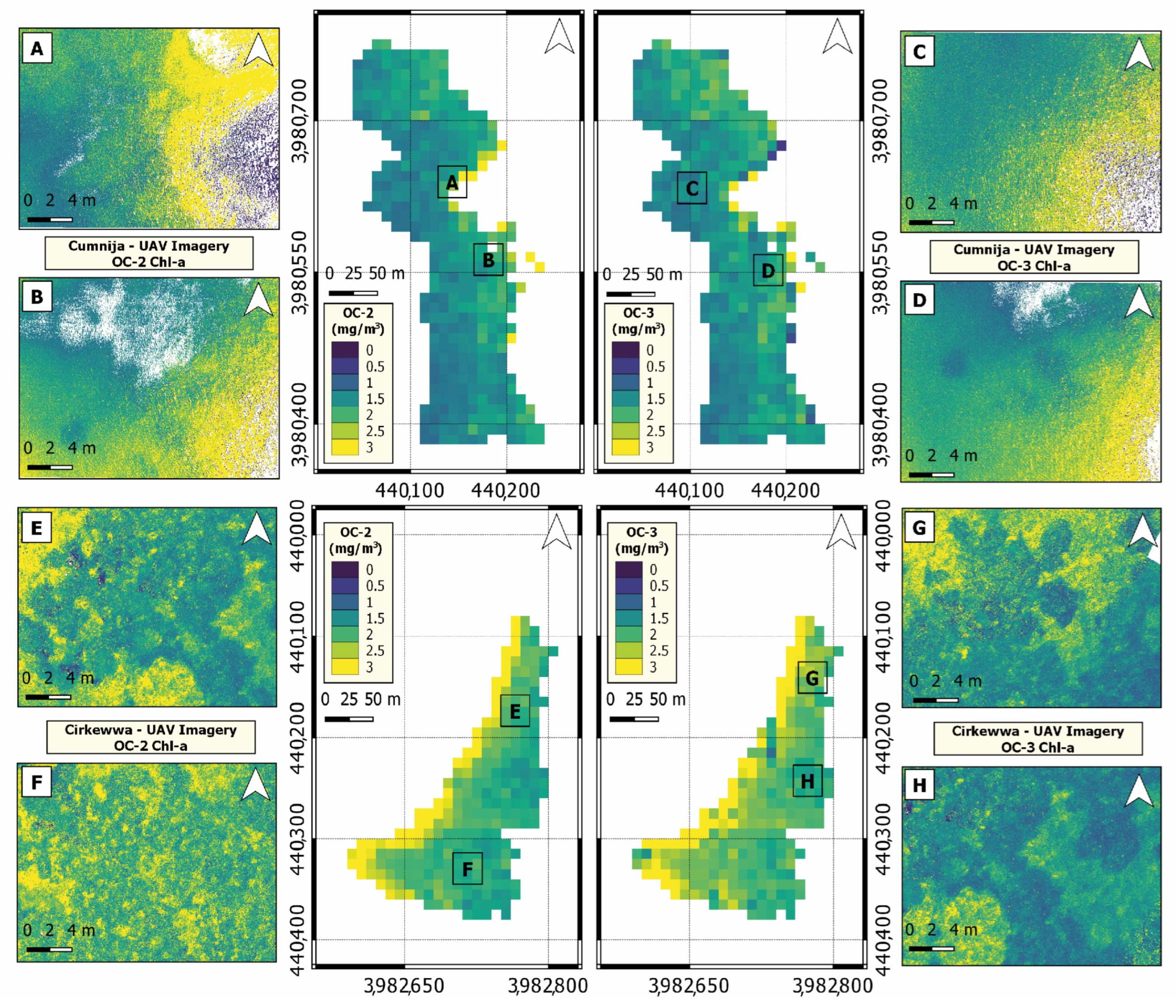
3.4. Water-Quality Algorithms (Chl-a and TSS) at Maltese Coastal Waters
4. Discussion
4.1. Performance of the Reflectance-Retrieval Methods from Individual UAV Captures
4.2. Performance and Considerations of the Mosaicking Method
4.3. Spectral Shape Analysis
4.4. Water Quality at Maltese Coastal Waters
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gai, Y.; Yu, D.; Zhou, Y.; Yang, L.; Chen, C.; Chen, J. An Improved Model for Chlorophyll-a Concentration Retrieval in Coastal Waters Based on UAV-Borne Hyperspectral Imagery: A Case Study in Qingdao, China. Water 2022, 12, 2769. [Google Scholar] [CrossRef]
- Moses, W.J.; Gitelson, A.A.; Perk, R.L.; Gurlin, D.; Rundquist, D.C.; Leavitt, B.C.; Barrow, T.M.; Brakhage, P. Estimation of chlorophyll-a concentration in turbid productive waters using airborne hyperspectral data. Water Res. 2012, 46, 993–1004. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baek, J.; Jo, Y.; Kim, W.; Lee, J.; Jung, D.; Kim, D.; Nam, J. A New Algorithm to Estimate Chlorophyll-A Concentrations in Turbid Yellow Sea Water Using a Multispectral Sensor in a Low-Altitude Remote Sensing System. Remote Sens. 2019, 11, 2257. [Google Scholar] [CrossRef] [Green Version]
- Lu, Q.; Si, W.; Wei, L.; Li, Z.; Xia, Z.; Ye, S.; Xia, Y. Retrieval of Water Quality from UAV-Borne Hyperspectral Imagery: A Comparative Study of Machine Learning Algorithms. Remote Sens. 2021, 13, 3928. [Google Scholar] [CrossRef]
- Guimarães, T.T.; Veronez, M.R.; Koste, E.C.; Gonzaga, L.; Bordin, F.; Inocencio, L.C.; Larocca, A.P.C.; De Oliveira, M.Z.; Vitti, D.C.; Mauad, F.F. An Alternative Method of Spatial Autocorrelation for Chlorophyll Detection in Water Bodies Using Remote Sensing. Sustainability 2017, 9, 416. [Google Scholar] [CrossRef] [Green Version]
- Doney, S.C.; Ruckelshaus, M.; Duffy, J.E.; Barry, J.P.; Chan, F.; English, C.A.; Galindo, H.M.; Grebmeier, J.M.; Hollowed, A.B.; Knowlton, N.N.; et al. Climate Change Impacts on Marine Ecosystems. Ann. Rev. Mar. Sci. 2012, 4, 11–17. [Google Scholar] [CrossRef] [Green Version]
- Gray, P.; Larsen, G.; Johnston, D.W. Drones address an observational blind spot for biological oceanography. Front. Ecol. Environ. 2022, 1, 413–421. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Yang, F.; Cao, X.; Bai, Z.; Zhu, J.; Chen, E.; Li, Y.; Ran, Y. Spatial and temporal variations of chlorophyll-a concentration from 2009 to 2012 in Poyang Lake, China. Environ. Earth Sci. 2015, 73, 4063–4075. [Google Scholar] [CrossRef]
- Birtwell, I.K.; Farrell, M.; Jonsson, A. The Validity of Including Turbidity Criteria for Aquatic Resource Protection in Land Development Guideline (Pacific and Yukon Region); Canadian Manuscript Report of Fisheries and Aquatic Sciences; Fisheries and Oceans Canada: Vancouver, BC, Canada, 2008; Volume 2852, ISSN 0706-6473. [Google Scholar]
- Xu, J.; Gao, C.; Wang, Y. Extraction of Spatial and Temporal Patterns of Concentrations of Chlorophyll-a and Total Suspended Matter in Poyang Lake Using GF-1 Satellite Data. Remote Sens. 2020, 12, 622. [Google Scholar] [CrossRef] [Green Version]
- Ying, H.; Xia, K.; Huang, X.; Feng, H.; Yang, Y.; Du, X.; Huang, L. Evaluation of water quality based on UAV images and the IMP-MPP algorithm. Ecol. Inform. 2021, 61, 101239. [Google Scholar] [CrossRef]
- Blondeau-Patissier, D.; Gower, J.F.R.; Dekker, A.G.; Phinn, S.R.; Brando, V.E. A review of ocean color remote sensing methods and statistical techniques for the detection, mapping and analysis of phytoplankton blooms in coastal and open oceans. Prog. Oceanogr. 2014, 123, 123–144. [Google Scholar] [CrossRef] [Green Version]
- Cheng, K.H.; Chan, S.N.; Lee, J.H.W. Remote sensing of coastal algal blooms using unmanned aerial vehicles. Mar. Pollut. Bull. 2020, 152, 110889. [Google Scholar] [CrossRef] [PubMed]
- Cillero-Castro, C.; Domínguez-Gómez, J.A.; Delgado-Marín, J.; Hinojo, B.A.; Cereijo, J.L.; Cheda, F.A.; Díaz-Varela, R. An UAV and Satellite Multispectral Data Approach to Monitor Water Quality in Small Reservoirs. Remote Sens. 2020, 12, 1514. [Google Scholar] [CrossRef]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [CrossRef] [PubMed]
- Caballero, I.; Steinmetz, F.; Navarro, G. Evaluation of the First Year of Operational Sentinel-2A Data for Retrieval of Suspended Solids in Medium- to High- Turbidity Waters. Remote Sens. 2018, 10, 982. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.A.; Dall’Olmo, G.; Moses, W.; Rundquist, D.C.; Barrow, T.; Fisher, T.R.; Gurlin, D.; Holz, J. A simple semi-analytical model for remote estimation of chlorophyll-a in turbid waters: Validation. Remote Sens. Environ. 2008, 112, 3582–3593. [Google Scholar] [CrossRef]
- Gilerson, A.A.; Gitelson, A.A.; Zhou, J.; Gurlin, D.; Moses, W.; Ioannou, I.; Ahmed, S.A. Algorithms for remote estimation of chlorophyll-a in coastal and inland waters using red and near infrared bands. Opt. Express 2010, 18, 24109–24125. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.M.; Carder, K.L.; Muller-Karger, F.E. Atmospheric correction of SeaWiFS imagery over turbid coastal waters: A practical method. Remote Sens. Environ. 2000, 74, 195–206. [Google Scholar] [CrossRef]
- Huang, W.; Chen, S.; Yang, X.; Johnson, E. Assessment of Chlorophyll-a Variations in High- and Low- Flow Seasons in Apalachicola Bay by MODIS 250-m remote sensing. Environ. Monit. Assess. 2014, 186, 8329–8342. [Google Scholar] [CrossRef]
- Nazeer, M.; Nichol, J.E. Development and application of a remote sensing-based Chlorophyll-a concentration prediction model for complex coastal Waters of Hong Kong. J. Hydrol. 2016, 532, 80–89. [Google Scholar] [CrossRef]
- Rodríguez-Benito, C.V.; Navarro, G.; Caballero, I. Using Copernicus Sentinel-2 and Sentinel-3 data to monitor harmful algal blooms in Southern Chile during the COVID-19 lockdown. Mar. Pollut. Bull. 2020, 161(A), 111722. [Google Scholar] [CrossRef] [PubMed]
- Syariz, M.A.; Lin, C.H.; Nguyen, M.V.; Jaelani, L.M.; Blanco, A.C. WaterNet: A Convolutional Neural Network for Chlorophyll-a Concentration Retrieval. Remote Sens. 2020, 12, 47–57. [Google Scholar] [CrossRef]
- Yang, W.; Matsushita, B.; Chen, J.; Fukushima, T.; Ma, R. An enhanced three-band index for estimating chlorophyll-a in turbid Case-II waters: Case studies of lake Kasumigaura, Japan, and Lake Dianchi, China. IEEE Geosci. Remote. Sens. Lett. 2010, 7, 655–659. [Google Scholar] [CrossRef] [Green Version]
- Choo, Y.; Kang, G.; Kim, D.; Lee, S. A study on the evaluation of water-bloom using image processing. Environ. Sci. Pollut. Res. 2018, 25, 36775–36780. [Google Scholar] [CrossRef]
- Gray, P.; Windle, A.E.; Dale, J.; Savelyev, I.B.; Johnson, Z.I.; Silsbe, G.M.; Larsen, G.D.; Johnston, D.W. Robust ocean color from drones: Viewing geometry, sky reflection removal, uncertainty analysis, and a survey of the Gulf Stream front. Limnol. Oceanogr. Methods 2022, 20, 656–673. [Google Scholar] [CrossRef]
- Windle, A.E.; Silsbe, G.M. Evaluation of Unoccupied Aircraft System (UAS) Remote Sensing Reflectance Retrievals for Water Quality Monitoring in Coastal Water. Front. Environ. Sci. 2021, 9, 674247. [Google Scholar] [CrossRef]
- Johansen, K.; Dunne, A.F.; Tu, Y.; Almashharawi, S.; Jones, B.H.; McCabe, M.F. Dye tracing and concentration mapping in coastal Waters using unmanned aerial vehicles. Sci. Rep. 2022, 12, 1141. [Google Scholar] [CrossRef]
- Arango, J.G.; Nairn, R.W. Prediction of Optical and Non-Optical Water Quality Parameters in Oligotrophic and Eutrophic Aquatic Systems Using a Small Unmanned Aerial System. Drones 2020, 4, 1. [Google Scholar] [CrossRef] [Green Version]
- Olivetti, D.; Roig, H.; Martinez, J.; Borges, H.; Ferreira, A.; Casari, R.; Salles, L.; Malta, E. Low-Cost Unmanned Aerial Multispectral Imagery for Siltation Monitoring in Reservoirs. Remote Sens. 2020, 12, 1855. [Google Scholar] [CrossRef]
- O’Reilly, J.E.; Maritorena, S.; Mitchell, B.G.; Siegal, D.A.; Carder, K.L.; Graver, S.A.; Kahru, M.; McClain, C. Ocean color chlorophyll algorithms for SeaWiFS. J. Geophys. Res. 1998, 103, 24937–24953. [Google Scholar] [CrossRef]
- Morel, A.; Maritorena, S. Bio-optical properties of oceanic waters: A reappraisal. J. Geophys. Res. 2001, 106, 7163–7180. [Google Scholar] [CrossRef] [Green Version]
- Nechad, B.; Ruddick, K.G.; Park, Y. Calibration and validation of a generic multisensor algorithm for mapping of total suspended matter in turbid waters. Remote Sens. Environ. 2010, 114, 854–866. [Google Scholar] [CrossRef]
- Hartfield, L.; Soupir, M.; Kanwar, R.S. Malta’s Water Scarcity Challenges: Past, Present, and Future Mitigation Strategies for Sustainable Water Supplies. Sustainability 2020, 12, 9835. [Google Scholar] [CrossRef]
- Reitano, R. Water harvesting and water collection systems in Mediterranean area. The case of Malta. Procedia Eng. 2011, 21, 81–88. [Google Scholar] [CrossRef] [Green Version]
- Bartolo, A.G.; Tsiamis, K.; Küpper, F.C. Identifying hotspots of non-indigenous species’ high impact in the Maltese islands (Central Mediterranean Sea). Mar. Poll. Bull. 2021, 164, 112016. [Google Scholar] [CrossRef]
- Borg, J.A.; Attrill, M.J.; Rowden, A.A.; Schembri, P.J.; Jones, M.B. Architectural characteristics of two bed types of the seagrass Posidonia oceánica over different spatial scales. Estuar. Coast. Shelf Sci. 2005, 62, 667–678. [Google Scholar] [CrossRef]
- Borg, J.A.; Schembri, P.J. Preliminary data on bathymetric and temporal changes in the morphology of a Maltese Posidonia oceánica (L.) Delile meadow. Int. Pour L’exploration Sci. Mer Méditerranée 1995, 34, 20. [Google Scholar]
- Sánchez-Lizaso, J.L.; Romero, J.; Ruiz, J.; Gacia, E.; Buceta, J.L.; Invers, O.; Fernández, Y.; Mas, J.; Ruíz-Mateo, A.; Manzanera, M. Salinity tolerance of the Mediterranean seagrass Posidonia oceánica: Recommendations to minimize the impacto f brine discharges from desalination plants. Desalination 2008, 221, 602–607. [Google Scholar] [CrossRef]
- European Space Agency. Sentinel-2 User Handbook; ESA Standard Document; European Space Agency: Paris, France, 2015; Available online: https://sentinel.esa.int/documents/247904/685211/Sentinel-2_User__Handbook_ed (accessed on 27 November 2022).
- European Space Agency. Sentinel-2 MSI Technical Guide. 2017. Available online: https://earth.esa.int/web/sentinel/technicalguides/sentinel-2-msi (accessed on 27 November 2022).
- Vanhellemont, Q.; Ruddick, K. Atmospheric correction of metre-scale optical satellite data for inland and coastal water applications. Remote Sens. Environ. 2018, 216, 586–597. [Google Scholar] [CrossRef]
- Vanhellemont, Q. Adaptation of the dark spectrum fitting atmospheric correction for aquatic applications of the Landsat and Sentinel-2 archives. Remote Sens. Environ. 2019, 225, 175–192. [Google Scholar] [CrossRef]
- Wei, J.; Lee, Z.; Shang, S. A system to measure the data quality of spectral remote-sensing reflectance of aquatic environments. J. Geophys. Res. 2016, 121, 8189–8207. [Google Scholar] [CrossRef]
- MicaSense. Image Processing Tutorials. 2022. Available online: https://github.com/micasense/imageprocessing/actions (accessed on 27 November 2022).
- Hochberg, E.J.; Andréfouet, S.; Tyler, M.R. Sea Surface Correction of High Spatial Resolution Ikonos Images to Improve Bottom Mapping in Near-Shore Environments. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1724–1729. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harbone, A.R.; Mumby, P.J. Technical Note: Simple and Robust Removal of Sun Glint for Mapping Shallow-water Benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Gerum, R.; Richter, S.; Winterl, A.; Mark, M.; Fabry, B.; Le Bohec, C.; Zitterbart, D.P. CameraTransform: A Python package for perspective corrections and image mapping. SoftwareX 2019, 10, 100333. [Google Scholar] [CrossRef] [PubMed]
- Seegers, B.N.; Stumpf, R.P.; Schaeffer, B.A.; Loftin, K.A.; Werdell, P.J. Performance metrics for the assessment of satellite data products: An ocean color case study. Opt. Express 2018, 26, 7404–7422. [Google Scholar] [CrossRef] [Green Version]
- Douay, F.; Verpoorter, C.; Duong, G.; Spilmont, N.; Gevaert, F. New Hyperspectral Procedure to Discriminate Intertidal Macroalgae. Remote Sens. 2022, 14, 346. [Google Scholar] [CrossRef]
- Poddar, S.; Chacko, N.; Swain, D. Estimation of Chlorophyll-a in Northern Coastal Bay of Bengal Using Landsat-8 OLI and Sentinel-2 MSI Sensors. Front. Mar. Sci. 2019, 6, 598. [Google Scholar] [CrossRef]
- Gitelson, A. The peak near 700 nm on radiance spectra of algae and water: Relationships of its magnitude and position with chlorophyll concentration. Int. J. Remote Sens. 1992, 17, 3367–3373. [Google Scholar] [CrossRef]
- Maritorena, S.; Morel, A.; Gentili, B. Diffuse reflectance of oceanic shallow waters: Influence of water Depth and bottom albedo. Limnol. Oceanogr. 1994, 39, 1689–1703. [Google Scholar] [CrossRef]
- Ma, S.; Zhou, Y.; Gowda, P.H.; Dong, J.; Zhang, G.; Kakani, V.G.; Wagle, P.; Chen, L.; Flynn, K.C.; Jiang, W. Application of the water-related spectral reflectance índices: A review. Ecol. Indic. 2019, 98, 68–79. [Google Scholar] [CrossRef]
- Malinowski, R.; Groom, G.; Schwanghart, W.; Heckrath, G. Detection and Delineation of Localized Flooding from WorldView-2 Multispectral Data. Remote Sens. 2015, 7, 14853–14875. [Google Scholar] [CrossRef]
- Dias, R.L.S.; da Silva, D.D.; Fernandes-Filho, E.I.; do Amaral, C.H.; dos Santos, E.P.; Marques, J.F.; Veloso, G.V. Machine learning models applied to TSS estimation in a reservoir using multispectral sensor onboard to RPA. Ecol. Inform. 2021, 65, 101414. [Google Scholar] [CrossRef]
- Román, A.; Navarro, G.; Caballero, I.; Tovar-Sánchez, A. High-spatial resolution UAV multispectral data complementing satellite imagery to characterize a chinstrap penguin colony ecosystem on Deception Island (Antarctica). GIsci Remote Sens. 2022, 59, 1159–1176. [Google Scholar] [CrossRef]
- Arango, J.G.; Holzbauer-Schweitzer, B.K.; Nairn, R.W.; Knox, R.C. Generation of Geolocated and Radiometrically Corrected True Reflectance Surfaces in the Visible Portion of the Electromagnetic Spectrum over Large Bodies of Water Using Images from sUAS. J. Unmanned Veh. Syst. 2020, 8, 172–185. [Google Scholar] [CrossRef]
- Tehrani, N.; Janalipour, M.; Babaei, H. Estimating Water Surface Chlorophyll-a Concentration by Big Remote Sensing Data in the Persian Gulf, Bushehr. Remote Sens. Earth Syst. Sci. 2021, 4, 87–95. [Google Scholar] [CrossRef]
- Chau, P.; Wang, C. Estimation of Total Suspended Matter Concentration of Ha Long Bay, Vietnam, from Formosat-5 Image. J. Mar. Sci. Eng. 2022, 10, 441. [Google Scholar] [CrossRef]
- Geraci, A.L.; Fargione, G.A.; Axiak, V.; Tabone Adami, E. Monitoring of environmental water quality of Maltese coastal waters using remote sensing techniques. Remote Sens. 1997, 96, 241. [Google Scholar]
- Deidun, A.; Drago, A.; Gauci, A.; Galea, A.; Azzopardi, J.; Mélin, F. A first attempt at testing correlation between MODIS ocean colour data and in situ chlorophyll-a measurements within Maltese coastal waters. Proc. SPIE 2016, 8175, 176–183. [Google Scholar] [CrossRef]
- Volpe, G.; Santoleri, R.; Vellucci, V.; Ribera d’Alcala, M.; Marullo, S.; D’Ortenzio, F. The colour of the Mediterranean Sea: Global versus regional bio-optical algorithms evaluation and implication for satellite chlorophyll estimates. Remote Sens. Environ. 2007, 107, 625–638. [Google Scholar] [CrossRef]
- Saliba, M. Phytoplankton Dynamics in Maltese Coastal Waters (Central Mediterranean) Using In Situ, Remote Sensing Methods, and Modelling Techniques. Master’s Thesis, Prifysgol Bangor University, School of Ocean Sciences (Anglesey), Menai Bridge, UK, 2017. [Google Scholar]
- Gauci, A.; Misra, A.; Krlovic, N.; Drago, A.; Ciani, D.; Falcini, F. The WaterColours Project—Preliminary Assessment of Chlorophyll-a Variability in the Malta Shelf Area. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 11–16 July 2021. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R2 | RMSE | MAE | Bias | ||
|---|---|---|---|---|---|
| Cirkewwa | DPA | 0.84 | 0.050 | 0.044 | 0.044 |
| DEG | 0.83 | 0.048 | 0.042 | 0.042 | |
| Ċumnija | DPA | 0.43 | 0.197 | 0.169 | 0.026 |
| DEG | 0.91 | 0.007 | 0.007 | 0.006 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Román, A.; Tovar-Sánchez, A.; Gauci, A.; Deidun, A.; Caballero, I.; Colica, E.; D’Amico, S.; Navarro, G. Water-Quality Monitoring with a UAV-Mounted Multispectral Camera in Coastal Waters. Remote Sens. 2023, 15, 237. https://doi.org/10.3390/rs15010237
Román A, Tovar-Sánchez A, Gauci A, Deidun A, Caballero I, Colica E, D’Amico S, Navarro G. Water-Quality Monitoring with a UAV-Mounted Multispectral Camera in Coastal Waters. Remote Sensing. 2023; 15(1):237. https://doi.org/10.3390/rs15010237
Chicago/Turabian StyleRomán, Alejandro, Antonio Tovar-Sánchez, Adam Gauci, Alan Deidun, Isabel Caballero, Emanuele Colica, Sebastiano D’Amico, and Gabriel Navarro. 2023. "Water-Quality Monitoring with a UAV-Mounted Multispectral Camera in Coastal Waters" Remote Sensing 15, no. 1: 237. https://doi.org/10.3390/rs15010237
APA StyleRomán, A., Tovar-Sánchez, A., Gauci, A., Deidun, A., Caballero, I., Colica, E., D’Amico, S., & Navarro, G. (2023). Water-Quality Monitoring with a UAV-Mounted Multispectral Camera in Coastal Waters. Remote Sensing, 15(1), 237. https://doi.org/10.3390/rs15010237