


Toward a Real-Time Analysis of Column Height by Visible Cameras: An Example from Mt. Etna, in Italy

 , , , and
, , , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Camera Network of INGV-OE and Dataset
2.2. Method for the Detection of Plume Height: The Program PHA
- (a)
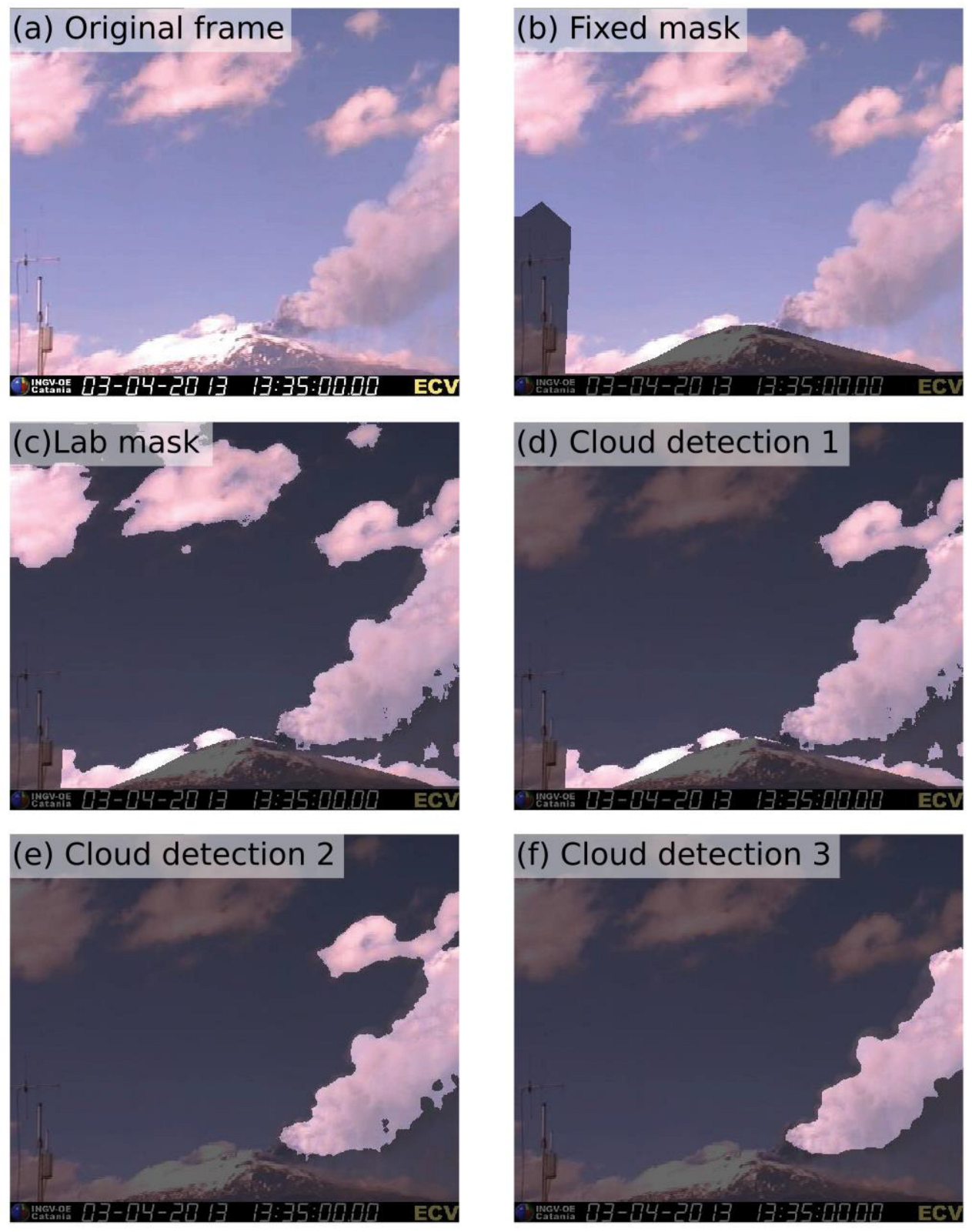
- Application of a fixed mask to identify and discard the zones of the images associated with infrastructure (e.g., buildings, antennas, etc.) and volcano topography (Figure 1b, see Section 2.2.1).
- (b)
- Subsequent use of a mask to identify and discard the zones of the images associated with the sky. This mask is mainly based on the analysis of the images in Lab scale (Figure 1c, see Section 2.2.2) and requires the development of the model calibration.
- (c)
- The application of three successive procedures to identify and discard clouds, including those in contact with the plume (Figure 1d–f).
- (d)
- A procedure to evaluate the internal variability of the non-masked zone of the images and eventually exclude the low-variability zones.
- (e)
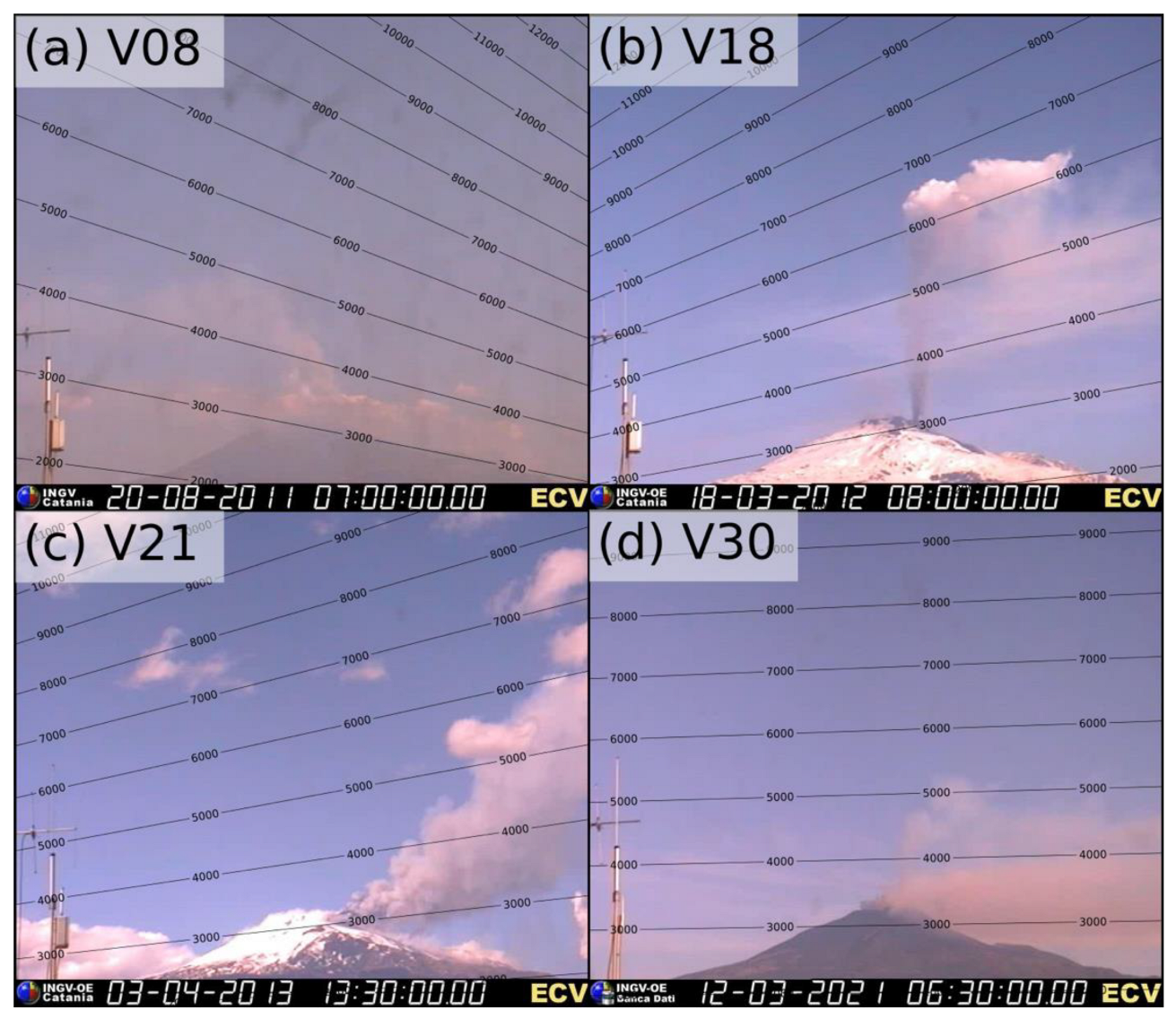
- Finally, considering a pixel-to-height conversion matrix (Figure 2), the highest pixel belonging to the plume is identified.
2.2.1. Fixed Mask
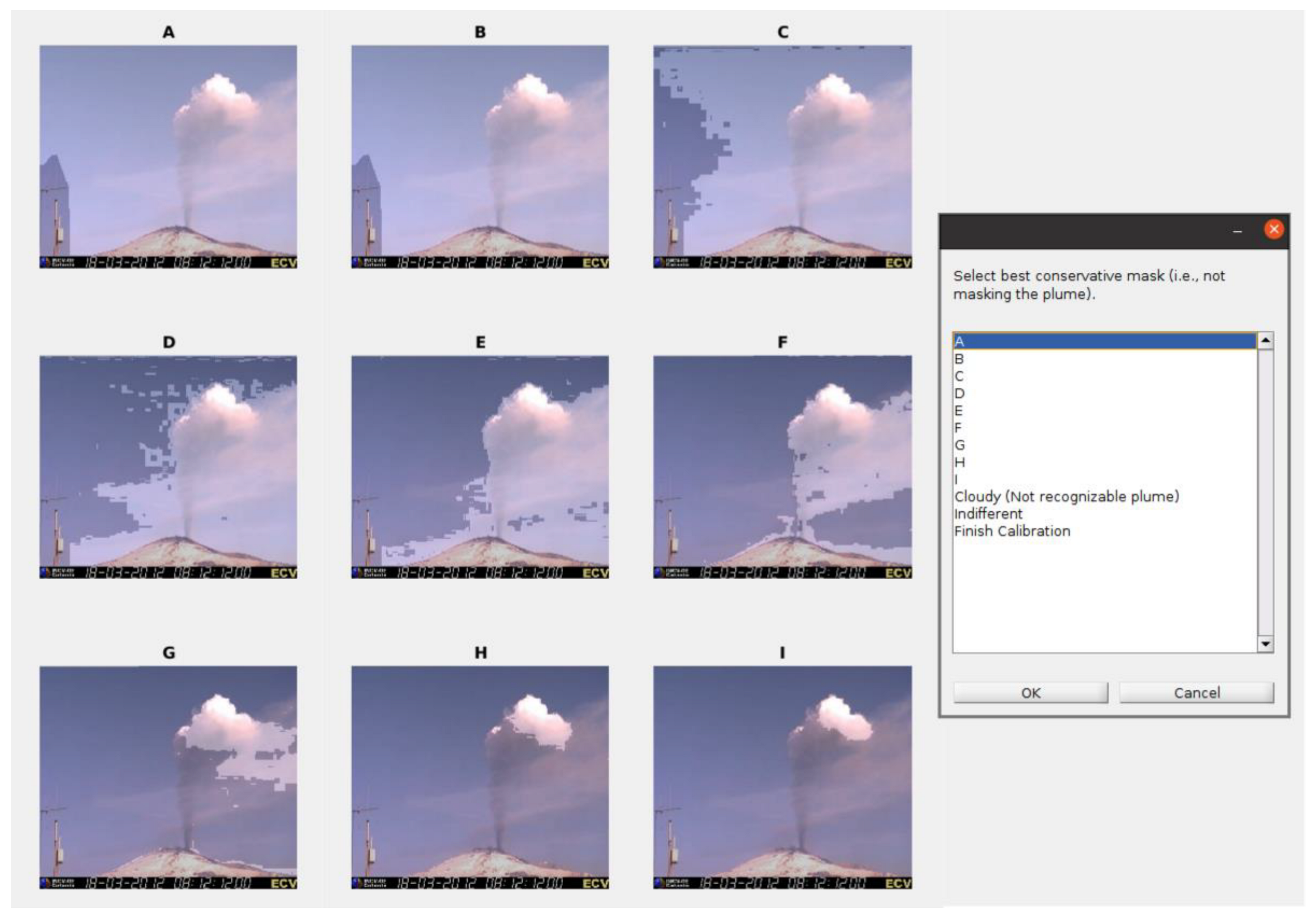
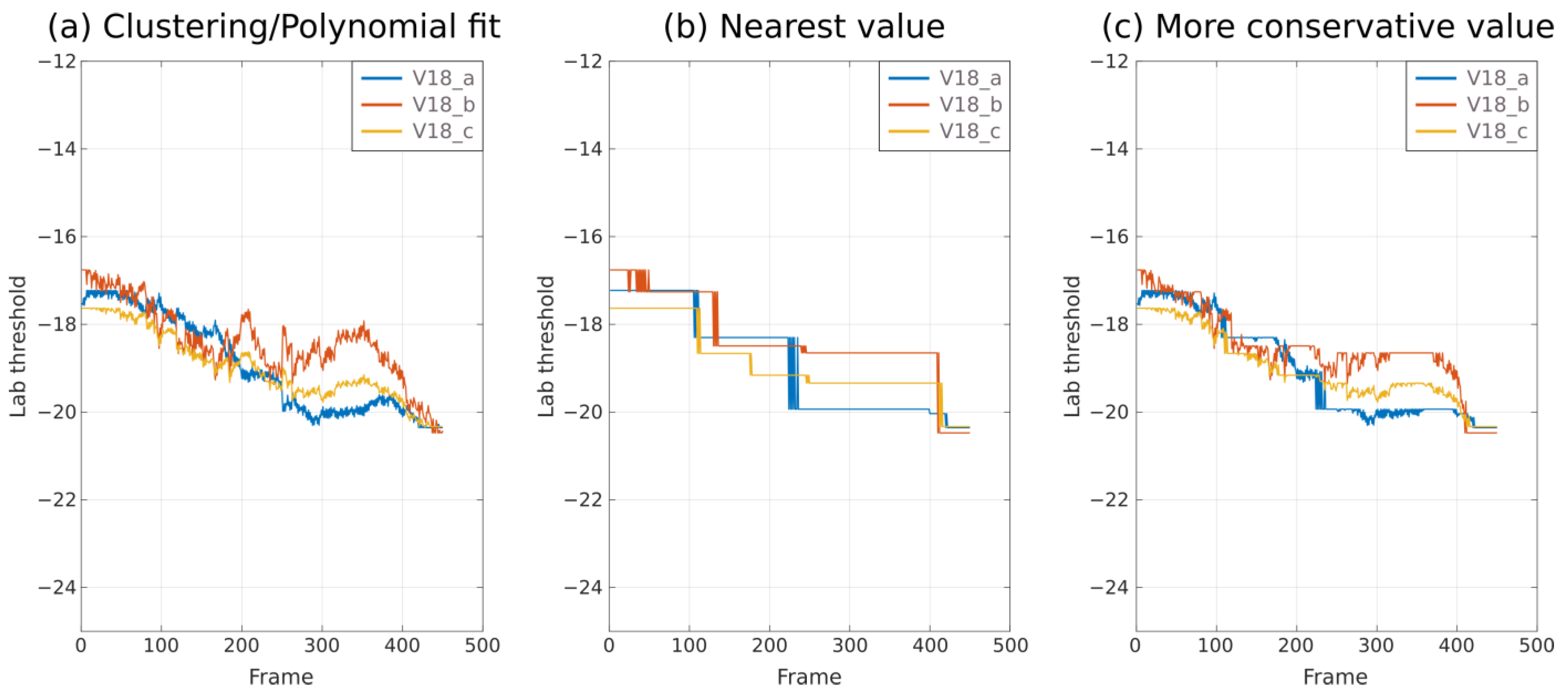
2.2.2. Lab Mask
- -
- Mean value of L (Lab scale, ).
- -
- Mean value of a (Lab scale, ).
- -
- Mean value of b (Lab scale, ).
- -
- Mean value of R (RGB scale, ).
- -
- Mean value of G (RGB scale, ).
- -
- Mean value of B (RGB scale, ).
- -
- Threshold ().
2.2.3. Cloud Identification
- (a)
- We trace a large number of segments between border points of the image (above the vent position) including both horizontal and inclined segments. When a line intersecting a completely masked zone is identified (i.e., with no plume or clouds), the entire region above this line is masked, reducing the computation time and discarding pixels associated with clouds (Figure 1d).
- (b)
- Then, all the not masked pixels are clustered considering a distance-based criterion, and only the nearest cluster to the volcanic vent is conserved for the following steps (Figure 1e).
- (c)
- Finally, the perimeter of the non-masked region is studied to identify lobe-like geometries. When the distance (calculated through a line) between two points in the non-masked region border is much lower than the distance calculated through the perimeter of this region, these points are assumed to define a lobe-like geometry, and this part of the non-masked zone is discarded. In this way, clouds superposed to the plume tend to be discarded (Figure 1f).
2.2.4. Internal Variability of Non-Masked Zone
2.2.5. Pixel to Height Conversion
2.2.6. Results
3. Test Examples and Results
3.1. Internal Calibrations
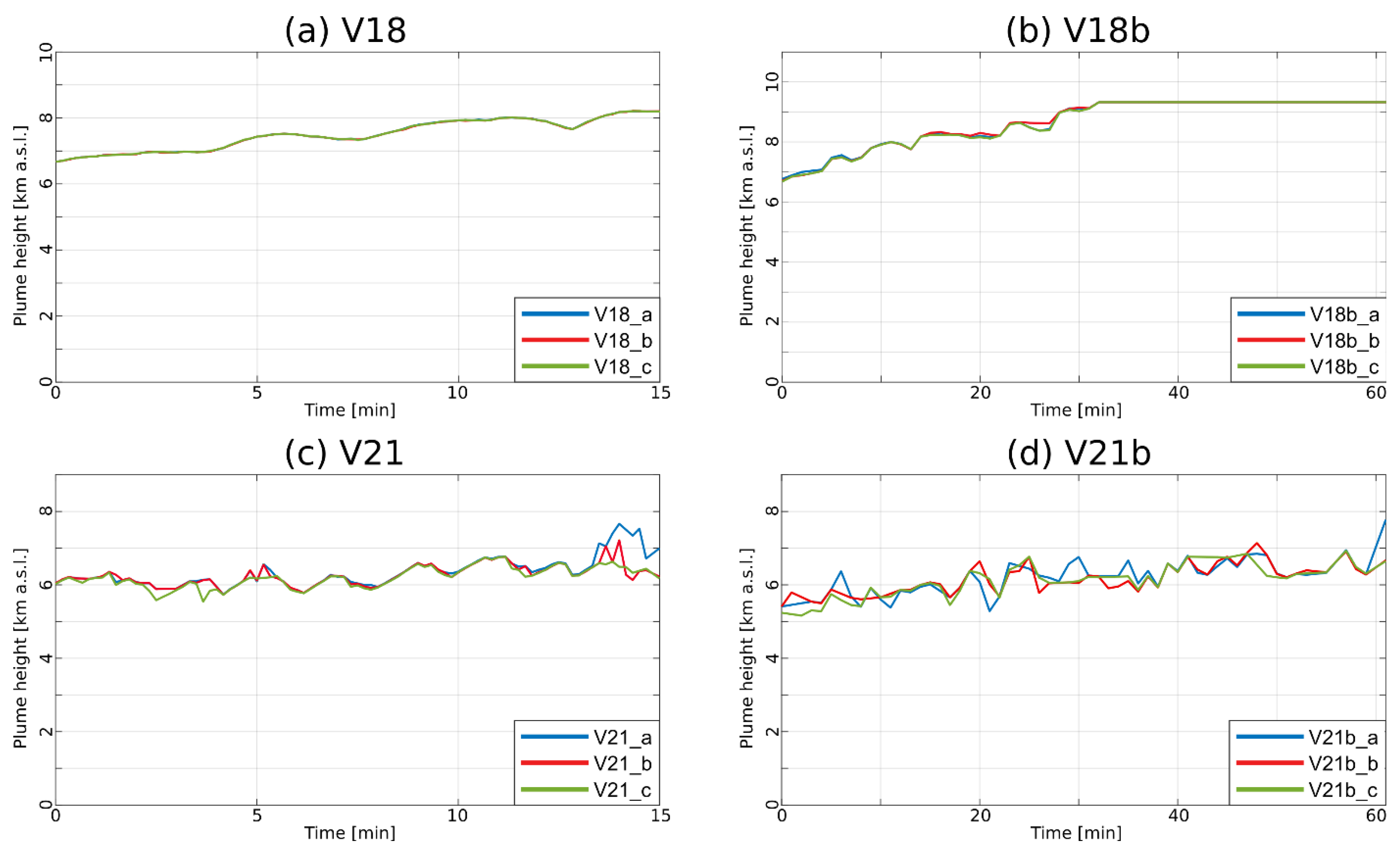
3.1.1. V18 (18 March 2012)
3.1.2. V21 (3 April 2013)
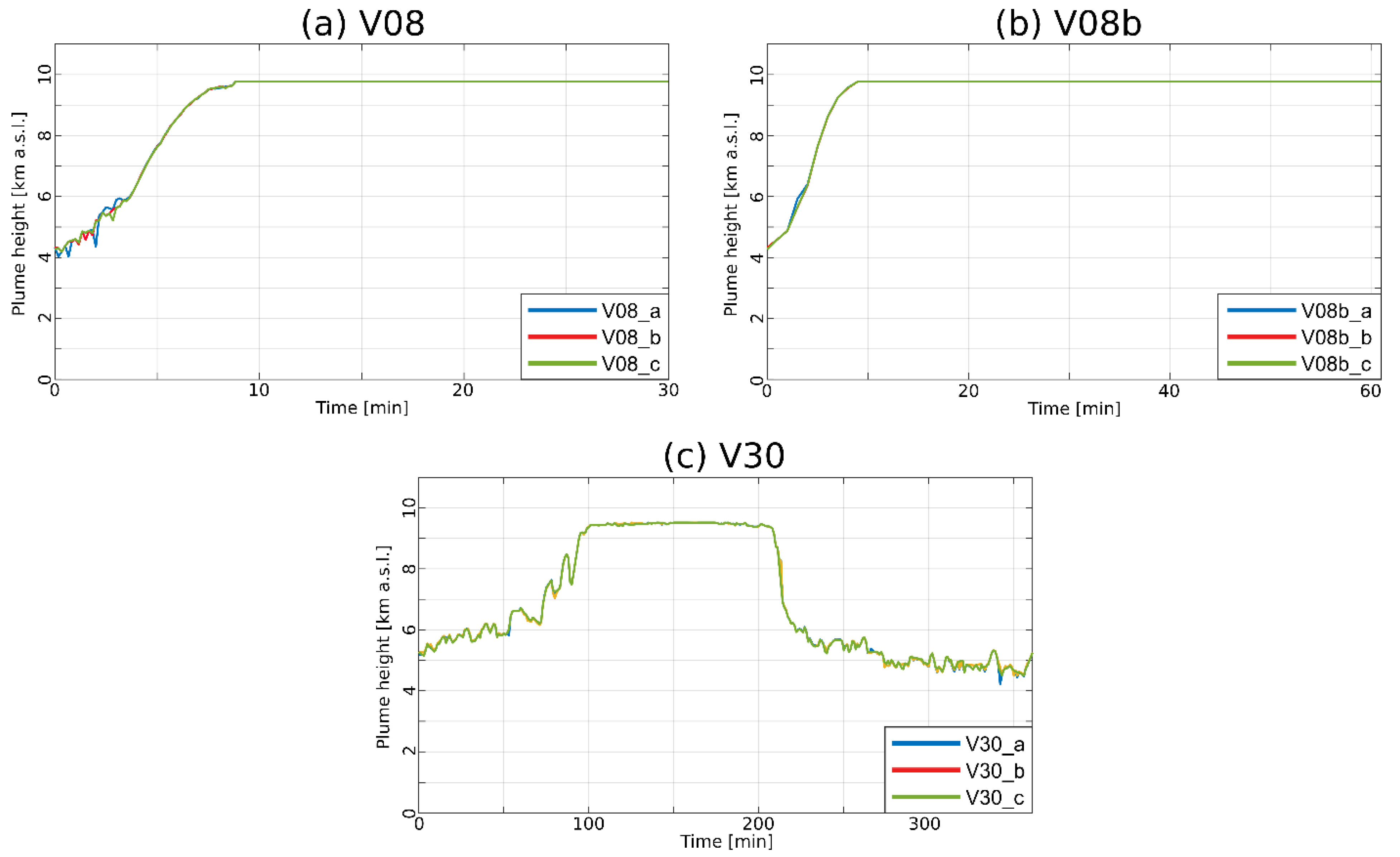
3.1.3. V08 (20 August 2011)
3.1.4. V30 (12 March 2021)
3.2. Operational Calibration
- (a)
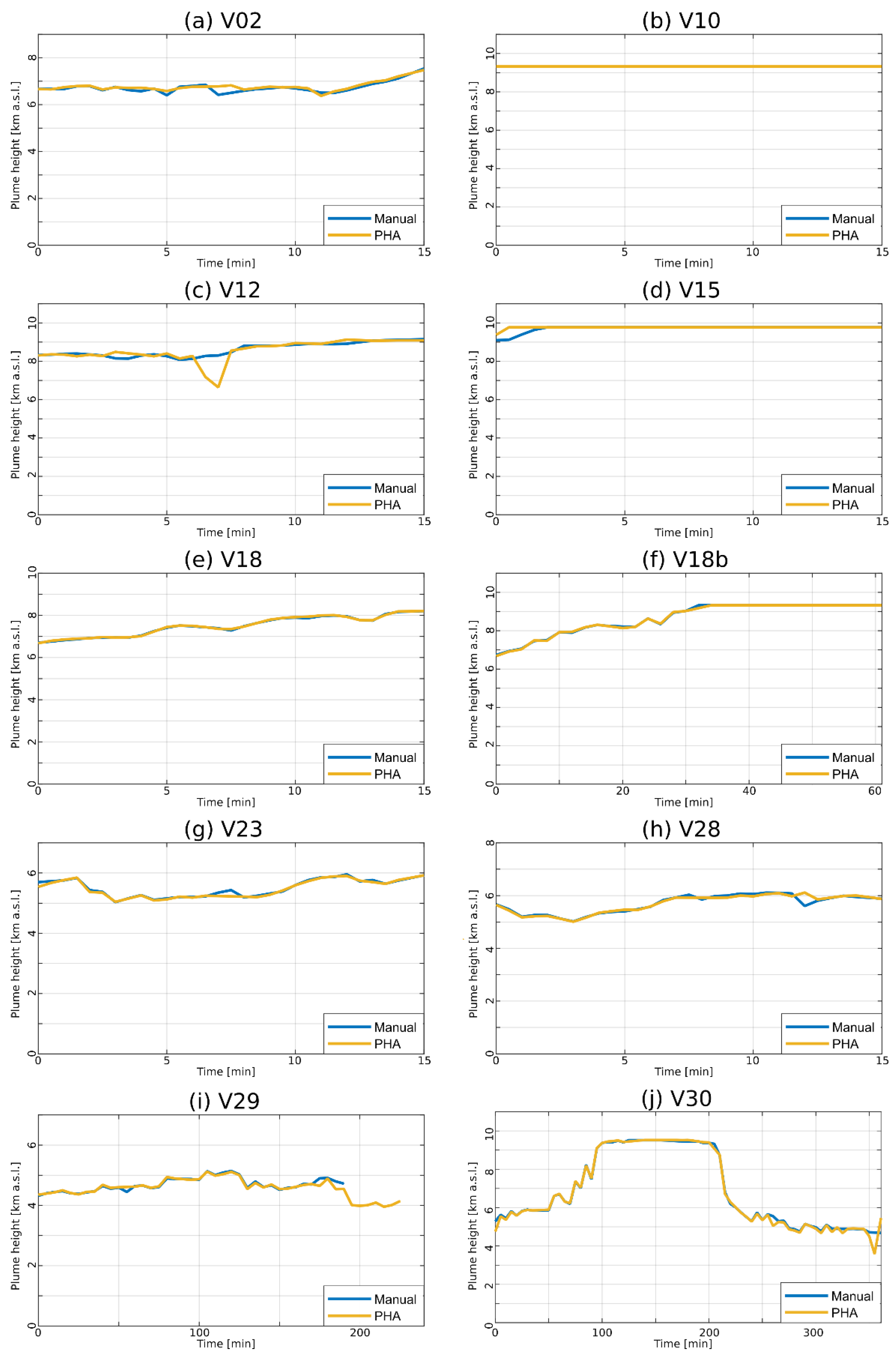
- For eruptions with favorable atmospheric conditions and when the outline of the plume is well defined (V02, V10, V12, V15, V18, V18b, V23, V28, V29, and V30), PHA is able to trace accurately plume height and in some cases small-scale oscillations of this parameter can be identified as well (Figure 7). Comparisons with manual estimates of plume height are presented in Figure 7, where we can observe remarkably consistent trends.
- (b)
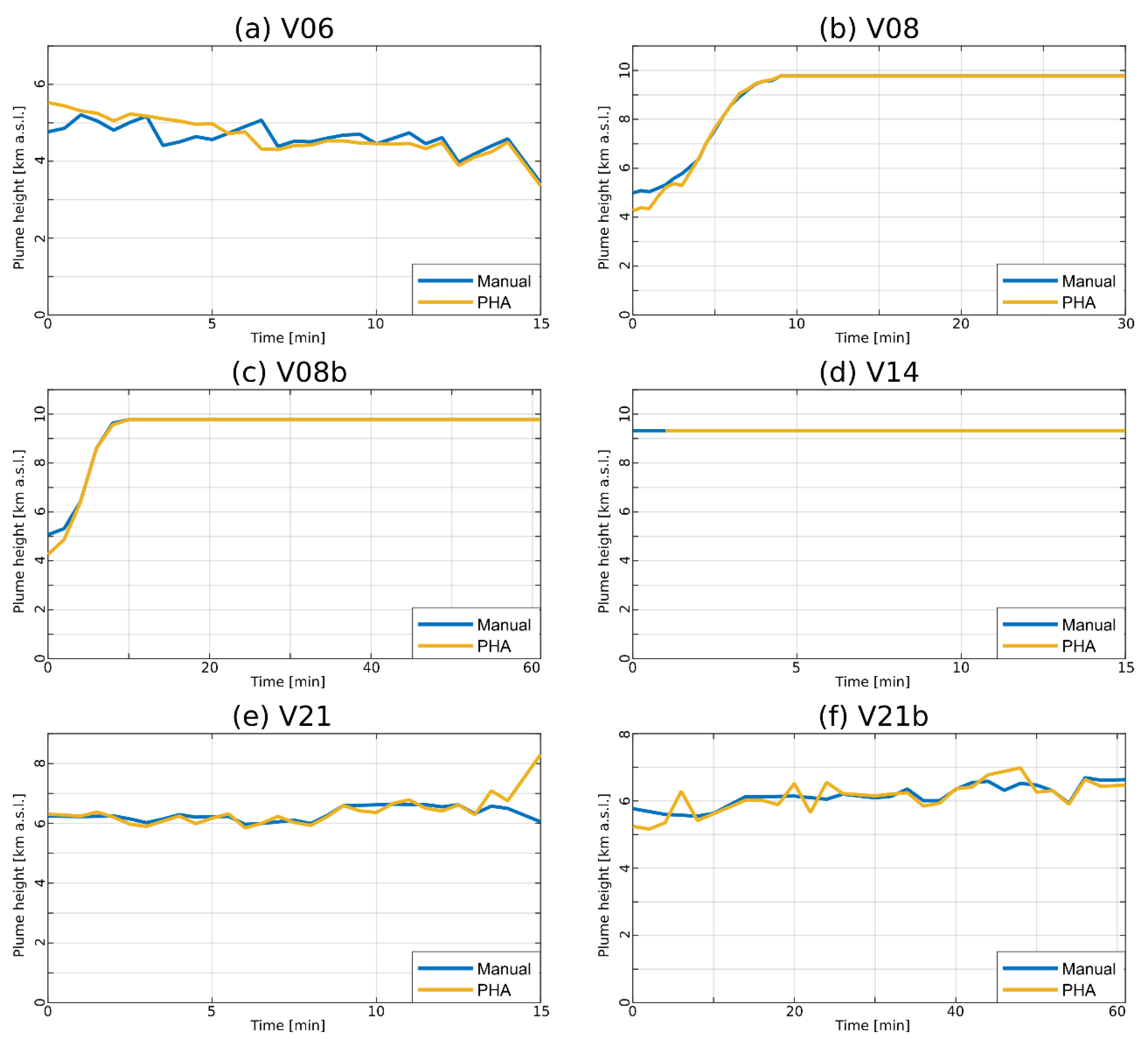
- For eruptions with unfavorable atmospheric conditions (e.g., small clouds interfering the visual field; V06, V08, V08b, V14, V21, and V21b), the program is able to recognize well the range of values of plume height and general tendencies, but small-scale oscillations are not traced and occasional mistakes in punctual frames are observed. However, we stress that they are typically below the intrinsic uncertainty of plume height estimations based on visible cameras [4], as observed in Figure 8, where we present comparisons with manual estimates.
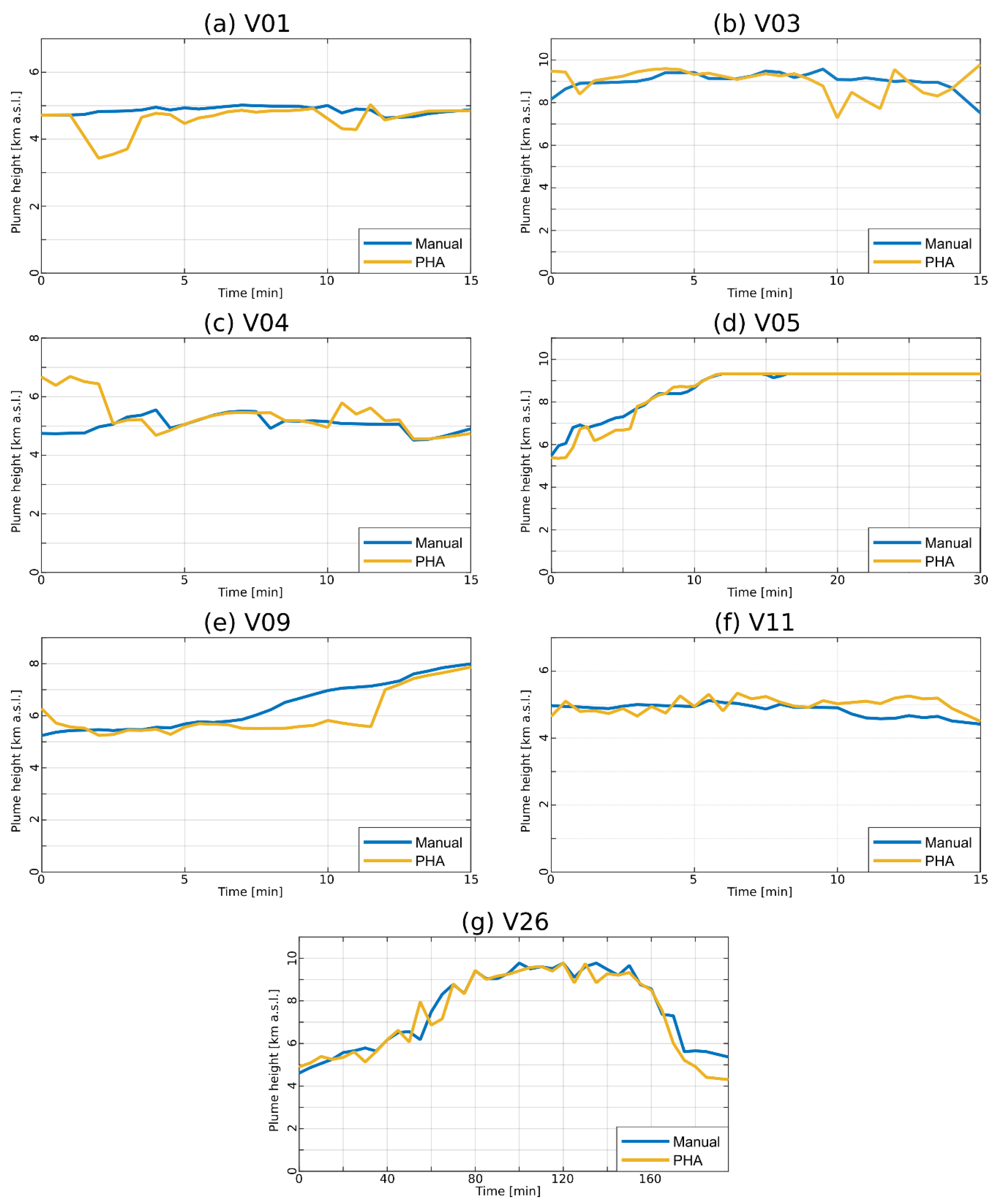
- (c)
- Finally, for eruptions with plumes characterized by diffuse outlines (V01, V03, V04, V05, V09, V11 and V26), PHA is able to trace well the range of values of plume height and recognizes large-scale tendencies. However, the results present a typically oscillating behavior around the manual estimates (Figure 9) and occasional mistakes in specific frames are observed as well.
4. Discussion
4.1. The Program PHA
4.2. Limitations, Strengths, and Future Advances of PHA
5. Conclusive Remarks
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bonadonna, C.; Connor, C.B.; Houghton, B.F.; Connor, L.; Byrne, M.; Laing, A.; Hincks, T.K. Probabilistic modeling of tephra dispersal: Hazard assessment of a multiphase rhyolitic eruption at Tarawera, New Zealand. J. Geophys. Res. Solid Earth 2005, 110, 2896. [Google Scholar] [CrossRef]
- Wilson, T.M.; Stewart, C.; Sword-Daniels, V.; Leonard, G.S.; Johnston, D.M.; Cole, J.W.; Wardman, J.; Wilson, G.; Barnard, S.T. Volcanic ash impacts on critical infrastructure. Phys. Chem. Earth Parts A/B/C 2012, 45, 5–23. [Google Scholar] [CrossRef]
- Craig, H.; Wilson, T.; Stewart, C.; Outes, V.; Villarosa, G.; Baxter, P. Impacts to agriculture and critical infrastructure in Argentina after ashfall from the 2011 eruption of the Cordón Caulle volcanic complex: An assessment of published damage and function thresholds. J. Appl. Volcanol. 2016, 5, 7. [Google Scholar] [CrossRef]
- Scollo, S.; Prestifilippo, M.; Bonadonna, C.; Cioni, R.; Corradini, S.; Degruyter, W.; Rossi, E.; Silvestri, M.; Biale, E.; Carparelli, G.; et al. Near-Real-Time Tephra Fallout Assessment at Mt. Etna, Italy. Remote Sens. 2019, 11, 2987. [Google Scholar] [CrossRef]
- Perttu, A.; Taisne, B.; De Angelis, S.; Assink, J.D.; Tailpied, D.; Williams, R.A. Estimates of plume height from infrasound for regional volcano monitoring. J. Volcanol. Geotherm. Res. 2020, 402, 106997. [Google Scholar] [CrossRef]
- Simionato, R.; Jarvis, P.A.; Rossi, E.; Bonadonna, C. PlumeTraP: A New MATLAB-Based Algorithm to Detect and Parametrize Volcanic Plumes from Visible-Wavelength Images. Remote Sens. 2022, 14, 1766. [Google Scholar] [CrossRef]
- Vásconez, F.; Moussallam, Y.; Harris, A.J.; Latchimy, T.; Kelfoun, K.; Bontemps, M.; Macías, C.; Hidalgo, S.; Córdova, J.; Battaglia, J.; et al. VIGIA: A thermal and visible imagery system to track volcanic explosions. Remote Sens. 2022, 14, 3355. [Google Scholar] [CrossRef]
- Scollo, S.; Prestifilippo, M.; Spata, G.; D'Agostino, M.; Coltelli, M. Monitoring and forecasting Etna volcanic plumes. Nat. Hazards Earth Syst. Sci. 2009, 9, 1573–1585. [Google Scholar] [CrossRef]
- White, J.T.; Connor, C.B.; Connor, L.; Hasenaka, T. Efficient inversion and uncertainty quantification of a tephra fallout model. J. Geophys. Res. Solid Earth 2017, 122, 281–294. [Google Scholar] [CrossRef]
- Lechner, P.; Tupper, A.; Guffanti, M.; Loughlin, S.; Casadevall, T. Volcanic Ash and Aviation—The Challenges of Real-Time, Global Communication of a Natural Hazard; Advances in Volcanology Series; Springer: Cham, Switzerland, 2017; pp. 51–64. [Google Scholar] [CrossRef]
- Sparks, R. The dimensions and dynamics of volcanic eruption columns. Bull. Volcanol. 1986, 48, 3–15. [Google Scholar] [CrossRef]
- Mastin, L.G.; Guffanti, M.; Servranckx, R.; Webley, P.; Barsotti, S.; Dean, K.; Durant, A.; Ewert, J.W.; Neri, A.; Rose, W.I.; et al. A multidisciplinary effort to assign realistic source parameters to models of volcanic ash-cloud transport and dispersion during eruptions. J. Volcanol. Geotherm. Res. 2009, 186, 10–21. [Google Scholar] [CrossRef]
- Degruyter, W.; Bonadonna, C. Improving on mass flow rate estimates of volcanic eruptions. Geophys. Res. Lett. 2012, 39, 2566. [Google Scholar] [CrossRef]
- Mereu, L.; Scollo, S.; Garcia, A.; Sandri, L.; Bonadonna, C.; Marzano, F.S. A New Radar-Based Statistical Model to Quantify Mass Eruption Rate of Volcanic Plumes. Geophys. Res. Lett. 2023, 50, e2022GL100596. [Google Scholar] [CrossRef]
- Tupper, A.; Textor, C.; Herzog, M.; Graf, H.; Richards, M. Tall clouds from small eruptions: The sensitivity of eruption height and fine ash content to tropospheric instability. Nat. Hazards 2009, 51, 375–401. [Google Scholar] [CrossRef]
- Denlinger, R.P.; Pavolonis, M.; Sieglaff, J. A robust method to forecast volcanic ash clouds. J. Geophys. Res. Atmos. 2012, 117. [Google Scholar] [CrossRef]
- Bonadonna, C.; Folch, A.; Loughlin, S.; Puempel, H. Future developments in modelling and monitoring of volcanic ash clouds: Outcomes from the first IAVCEI-WMO workshop on Ash Dispersal Forecast and Civil Aviation. Bull. Volcanol. 2012, 74, 1–10. [Google Scholar] [CrossRef]
- Searcy, C.; Dean, K.; Stringer, W. PUFF: A high-resolution volcanic ash tracking model. J. Volcanol. Geotherm. Res. 1998, 80, 1–16. [Google Scholar] [CrossRef]
- Stohl, A.; Forster, C.; Frank, A.; Seibert, P.; Wotawa, G. The Lagrangian particle dispersion model FLEXPART version 6.2. Atmos. Chem. Phys. 2005, 5, 2461–2474. [Google Scholar] [CrossRef]
- Costa, A.; Macedonio, G.; Folch, A. A three-dimensional Eulerian model for transport and deposition of volcanic ashes. Earth Planet. Sci. Lett. 2006, 241, 634–647. [Google Scholar] [CrossRef]
- Tadini, A.; Roche, O.; Samaniego, P.; Guillin, A.; Azzaoui, N.; Gouhier, M.; de' Michieli Vitturi, M.; Pardini, P.; Eychenne, J.; Bernard, B.; et al. Quantifying the uncertainty of a coupled plume and tephra dispersal model: PLUME-MOM/HYSPLIT simulations applied to Andean volcanoes. J. Geophys. Res. Solid Earth 2020, 125, e2019JB018390. [Google Scholar] [CrossRef]
- Aravena, A.; Bevilacqua, A.; Neri, A.; Gabellini, P.; Ferrés, D.; Escobar, D.; Aiuppa, A.; Cioni, R. Scenario-based probabilistic hazard assessment for explosive events at the San Salvador Volcanic complex, El Salvador. J. Volcanol. Geotherm. Res. 2023, 438, 107809. [Google Scholar] [CrossRef]
- Rose, W.I.; Bluth, G.J.S.; Ernst, G.G. Integrating retrievals of volcanic cloud characteristics from satellite remote sensors: A summary. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2000, 358, 1585–1606. [Google Scholar] [CrossRef]
- Piscini, A.; Corradini, S.; Marchese, F.; Merucci, L.; Pergola, N.; Tramutoli, V. Volcanic ash cloud detection from space: A comparison between the RSTASH technique and the water vapour corrected BTD procedure. Geomat. Nat. Hazards Risk 2011, 2, 263–277. [Google Scholar] [CrossRef]
- Prata, F.; Lynch, M. Passive Earth Observations of Volcanic Clouds in the Atmosphere. Atmosphere 2019, 10, 199. [Google Scholar] [CrossRef]
- Andò, B.; Pecora, E. An advanced video-based system for monitoring active volcanoes. Comput. Geosci. 2006, 32, 85–91. [Google Scholar] [CrossRef]
- Prata, A.J.; Bernardo, C. Retrieval of volcanic ash particle size, mass and optical depth from a ground-based thermal infrared camera. J. Volcanol. Geotherm. Res. 2009, 186, 91–107. [Google Scholar] [CrossRef]
- Harris, D.M.; Rose, W.I.; Roe, R.; Thompson, M.R.; Lipman, P.; Mullineaux, D. Radar observations of ash eruptions. USA Geol. Surv. Prof. Pap. 1981, 1250, 323–333. [Google Scholar]
- Vulpiani, G.; Ripepe, M.; Valade, S. Mass discharge rate retrieval combining weather radar and thermal camera observations. J. Geophys. Res. Solid Earth 2016, 121, 5679–5695. [Google Scholar] [CrossRef]
- Marzano, F.S.; Picciotti, E.; Montopoli, M.; Vulpiani, G. Inside volcanic clouds: Remote sensing of ash plumes using microwave weather radars. Bull. Am. Meteorol. Soc. 2013, 94, 1567–1586. [Google Scholar] [CrossRef]
- Montopoli, M. Velocity profiles inside volcanic clouds from three-dimensional scanning microwave dual-polarization Doppler radars. J. Geophys. Res. Atmos. 2016, 121, 7881–7900. [Google Scholar] [CrossRef]
- Wiegner, M.; Gasteiger, J.; Groß, S.; Schnell, F.; Freudenthaler, V.; Forkel, R. Characterization of the Eyjafjallajökull ash-plume: Potential of lidar remote sensing. Phys. Chem. Earth Parts A/B/C 2012, 45, 79–86. [Google Scholar] [CrossRef]
- Scollo, S.; Boselli, A.; Coltelli, M.; Leto, G.; Pisani, G.; Spinelli, N.; Wang, X. Monitoring Etna volcanic plumes using a scanning LiDAR. Bull. Volcanol. 2012, 74, 2383–2395. [Google Scholar] [CrossRef]
- Sicard, M.; Córdoba-Jabonero, C.; Barreto, A.; Welton, E.J.; Gil-Díaz, C.; Carvajal-Pérez, C.V.; Torres, C. Volcanic eruption of Cumbre Vieja, La Palma, Spain: A first insight to the particulate matter injected in the troposphere. Remote Sens. 2022, 14, 2470. [Google Scholar] [CrossRef]
- Tupper, A.; Wunderman, R. Reducing discrepancies in ground and satellite-observed eruption heights. J. Volcanol. Geotherm. Res. 2009, 186, 22–31. [Google Scholar] [CrossRef]
- Corradini, S.; Montopoli, M.; Guerrieri, L.; Ricci, M.; Scollo, S.; Merucci, L.; Marzano, F.S.; Pugnaghi, S.; Prestifilippo, M.; Ventress, L.J.; et al. A multi-sensor approach for volcanic ash cloud retrieval and eruption characterization: The 23 November 2013 Etna lava fountain. Remote Sens. 2016, 8, 58. [Google Scholar] [CrossRef]
- Marzano, F.S.; Vulpiani, G.; Rose, W.I. Microphysical characterization of microwave radar reflectivity due to volcanic ash clouds. IEEE Trans. Geosci. Remote Sens. 2006, 44, 313–327. [Google Scholar] [CrossRef]
- Bombrun, M.; Jessop, D.; Harris, A.; Barra, V. An algorithm for the detection and characterisation of volcanic plumes using thermal camera imagery. J. Volcanol. Geotherm. Res. 2018, 352, 26–37. [Google Scholar] [CrossRef]
- Wood, K.; Thomas, H.; Watson, M.; Calway, A.; Richardson, T.; Stebel, K.; Naismith, A.; Berthoud, L.; Lucas, J. Measurement of three dimensional volcanic plume properties using multiple ground based infrared cameras. ISPRS J. Photogramm. Remote Sens. 2019, 154, 163–175. [Google Scholar] [CrossRef]
- Osores, S.; Ruiz, J.; Folch, A.; Collini, E. Volcanic ash forecast using ensemble-based data assimilation: An ensemble transform Kalman filter coupled with the FALL3D-7.2 model (ETKF-FALL3D version 1.0). Geosci. Model Dev. 2020, 13, 1–22. [Google Scholar] [CrossRef]
- Pardini, F.; Corradini, S.; Costa, A.; Ongaro, T.E.; Merucci, L.; Neri, A.; Stelitano, D.; de’Michieli Vitturi, M. Ensemble-Based Data Assimilation of Volcanic Ash Clouds from Satellite Observations: Application to the 24 December 2018 Mt. Etna Explosive Eruption. Atmosphere 2020, 11, 359. [Google Scholar] [CrossRef]
- Lu, S.; Lin, H.X.; Heemink, A.; Segers, A.; Fu, G. Estimation of volcanic ash emissions through assimilating satellite data and ground-based observations. J. Geophys. Res. Atmos. 2016, 121, 10971–10994. [Google Scholar] [CrossRef]
- Branca, S.; del Carlo, P. Types of eruptions of Etna volcano AD 1670–2003: Implications for short-term eruptive behaviour. Bull. Volcanol. 2005, 67, 732–742. [Google Scholar] [CrossRef]
- De Beni, E.; Behncke, B.; Branca, S.; Nicolosi, I.; Carluccio, R.; D’Ajello Caracciolo, F.; Chiappini, M. The continuing story of Etna’s New Southeast Crater (2012–2014): Evolution and volume calculations based on field surveys and aerophotogrammetry. J. Volcanol. Geotherm. Res. 2015, 303, 175–186. [Google Scholar] [CrossRef]
- Kampouri, A.; Amiridis, V.; Solomos, S.; Gialitaki, A.; Marinou, E.; Spyrou, C.; Georgoulias, A.K.; Akritidis, D.; Papagiannopoulos, N.; Mona, L.; et al. Investigation of Volcanic Emissions in the Mediterranean: “The Etna–Antikythera Connection”. Atmosphere 2021, 12, 40. [Google Scholar] [CrossRef]
- Scollo, S.; Coltelli, M.; Bonadonna, C.; Del Carlo, P. Tephra hazard assessment at Mt. Etna (Italy). Nat. Hazards Earth Syst. Sci. 2013, 13, 3221–3233. [Google Scholar] [CrossRef]
- Alparone, S.; Andronico, D.; Lodato, L.; Sgroi, T. Relationship between tremor and volcanic activity during the Southeast Crater eruption on Mount Etna in early 2000. J. Geophys. Res. Solid Earth 2003, 108, 2241. [Google Scholar] [CrossRef]
- Calvari, S.; Biale, E.; Bonaccorso, A.; Cannata, A.; Carleo, L.; Currenti, G.; Di Grazia, G.; Ganci, G.; Iozzia, A.; Pecora, E.; et al. Explosive paroxysmal events at Etna volcano of different magnitude and intensity explored through a multidisciplinary monitoring system. Remote Sens. 2022, 14, 4006. [Google Scholar] [CrossRef]
- Scollo, S.; Prestifilippo, M.; Pecora, E.; Corradini, S.; Merucci, L.; Spata, G.; Coltelli, M. Eruption column height estimation of the 2011-2013 Etna lava fountains. Ann. Geophys. 2014, 57, 2. [Google Scholar] [CrossRef]
- Behncke, B.; Branca, S.; Corsaro, R.A.; De Beni, E.; Miraglia, L.; Proietti, C. The 2011–2012 summit activity of Mount Etna: Birth, growth and products of the new SE crater. J. Volcanol. Geotherm. Res. 2014, 270, 10–21. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Date | Time (UTC) | Frames | Observations |
|---|---|---|---|---|
| V01 | 10 April 2011 | 08:00–08:15 | 450 | Optimal atmospheric conditions. The outline of the plume is diffuse. |
| V02 | 10 April 2011 | 10:30–10:45 | 450 | Favorable atmospheric conditions. |
| V03 | 12 May 2011 | 03:30–03:45 | 450 | Favorable atmospheric conditions. The outline of the plume is diffuse. The images are particularly dark. |
| V04 | 12 May 2011 | 05:00–05:15 | 450 | Favorable atmospheric conditions. The outline of the plume is diffuse during a portion of the video. |
| V05 | 9 July 2011 | 14:00–14:30 | 900 | Unfavorable atmospheric conditions. The outline of the plume is diffuse during a portion of the video. |
| V06 | 25 July 2011 | 05:00–05:15 | 450 | Partially favorable atmospheric conditions (presence of small clouds near the plume). |
| V07 | 25 July 2011 | 06:45–07:00 | 450 | Weak plume with most of the ash spreading laterally 1. Optimal atmospheric conditions. |
| V08 | 20 August 2011 | 07:00–07:30 | 900 | Partially unfavorable atmospheric conditions. |
| V08b | 20 August 2011 | 07:00–08:00 | 61 | Partially unfavorable atmospheric conditions. |
| V09 | 29 August 2011 | 04:00–04:15 | 450 | Poor visibility. The outline of the plume is diffuse. |
| V10 | 29 August 2011 | 04:30–04:45 | 450 | Plume height is beyond the measurement limit during the whole video. The images are particularly reddish. |
| V11 | 8 September 2011 | 06:00–06:15 | 450 | The outline of the plume is diffuse. Favorable atmospheric conditions. |
| V12 | 8 September 2011 | 07:30–07:45 | 450 | Favorable atmospheric conditions. |
| V13 | 15 November 2011 | 10:00–10:15 | 450 | No visibility 2. |
| V14 | 15 November 2011 | 12:15–12:30 | 450 | Unfavorable atmospheric conditions. Plume height is beyond the measurement limit during the whole video. |
| V15 | 5 January 2012 | 05:45–06:00 | 450 | The images are particularly dark. Plume height is beyond the measurement limit during the whole video |
| V16 | 5 January 2012 | 13:00–13:15 | 450 | Weak plume with most of the ash spreading laterally 1. |
| V17 | 18 March 2012 | 05:00–05:15 | 450 | Weak plume with most of the ash spreading laterally 1. |
| V18 | 18 March 2012 | 08:00–08:15 | 450 | Optimal atmospheric conditions. |
| V18b | 18 March 2012 | 08:00–09:00 | 61 | Optimal atmospheric conditions. |
| V19 | 28 February 2013 | 10:00–10:15 | 450 | Poor visibility. A small portion of the plume is recognizable 2. |
| V20 | 28 February 2013 | 10:30–10:45 | 450 | Poor visibility. A small portion of the plume is recognizable 2. |
| V21 | 3 April 2013 | 13:30–13:45 | 450 | Partially favorable atmospheric conditions (presence of small clouds near the plume). |
| V21b | 3 April 2013 | 13:00–14:00 | 61 | Partially favorable atmospheric conditions (presence of small clouds near the plume). |
| V22 | 3 April 2013 | 16:00–16:15 | 450 | Weak plume with most of the ash spreading laterally 1. The outline of the plume is diffuse. |
| V23 | 12 April 2013 | 10:45–11:00 | 450 | Favorable atmospheric conditions. |
| V24 | 12 April 2013 | 16:00–16:15 | 450 | Weak plume with most of the ash spreading laterally 1. The outline of the plume is diffuse. |
| V25 | 18 April 2013 | 08:00–08:15 | 450 | Weak plume with most of the ash spreading laterally 1. The outline of the plume is diffuse. |
| V26 | 18 April 2013 | 10:30–13:45 | 5850 | The video includes a period with plume height beyond the measurement limit, while the outline of the plume is diffuse in the final part. |
| V27 | 27 April 2013 | 14:30–14:45 | 450 | Weak plume with most of the ash spreading laterally 1. |
| V28 | 27 April 2013 | 17:45–18:00 | 450 | The images are particularly dark. |
| V29 | 19 April 2020 | 06:00–10:00 | 7200 | Favorable atmospheric conditions. |
| V30 | 12 March 2021 | 06:35–12:10 | 361 | The video includes a period with plume height beyond the measurement limit. |
| Section | Function | Description |
|---|---|---|
| Fixed mask | Load | Load a previously created fixed mask. |
| Fixed mask | Create | The program displays a graphical interface, where the user can draw a fixed mask on a reference image (selected by the user). This information is then saved in the folder MaskFiles. |
| Fixed mask | Plot | Plot the reference image and fixed mask. |
| Vent position | Load | Load a previously created vent position. |
| Vent position | Create | The program displays a graphical interface, where the user can select the vent position on a reference image (selected by the user). This information is then saved in the folder VentFiles. |
| Vent position | Plot | Plot the reference image, vent position and fixed mask. |
| Pixel to height | Load | Load a previously created pixel-height conversion matrix. |
| Pixel to height | Create | Three modalities to create a pixel-height conversion matrix are available: -Constant, vertical gradient: the user is asked to indicate the height associated with the vent and with the top of the reference image. -Bilinear interpolation: a graphical interface is displayed, and the user is asked to select a set of pixels of the image and indicate their heights. The resulting conversion matrix is computed by fitting this information as a function of pixel position, using a bilinear interpolation. -Second-order interpolation: a graphical interface is displayed, and the user is asked to select a set of pixels of the image and indicate their heights. The resulting conversion matrix is computed by fitting this information as a function of pixel position, using a second-order interpolation. The resulting pixel-height conversion matrix is saved in the folder PixelHeightFiles. |
| Pixel to height | Plot | Plot the reference image and the isolines of height, derived from the pixel-height conversion matrix. |
| Calibration: Lab mask | Load | Load a previously created calibration function. |
| Calibration: Lab mask | Create | An interactive, iterative procedure is launched, which samples frames from a calibration dataset provided by the user (a single video, a folder containing videos, or a folder containing images) and shows the application of different threshold values in the Lab mask (see Section 2.2.2). The user is asked to indicate the best conservative threshold value. Once the iteration is finished by the user, the program computes the functions used to calculate the Lab mask threshold as a function of the image properties (see Section 2.2.2). The resulting function is saved in the folder CalibrationFiles/LabMask. |
| Calibration: Lab mask | Improve | This routine reproduces the same process associated with the creation of a Lab mask calibration, but the information is added to an existent Lab mask calibration. Since the performance of this mask is strongly controlled by the amount of data that the calibration includes, this function allows to improve the program performance for a given static camera. |
| Calibration: Lab mask | Merge | This routine allows to merge the data contained in two or more existent Lab mask calibrations and creates a new, likely better calibration function. |
| Calibration: Lab mask | Test | An iterative procedure is launched that shows the application of the Lab mask, whose threshold is computed with the loaded calibration function, on a set of frames selected by the user (a single video, a folder containing videos, or a folder containing images). |
| Calibration: Lab mask | Compare | The user is asked to select two or more calibration functions (in order to compare them) and a set of frames (a single video or a folder of images). Two modalities are available: -Plot Threshold: the program calculates the Lab mask thresholds of the selected frames considering the different calibration functions. Then, this information is plotted. -Show images: an iterative procedure is launched that shows the application of different Lab masks, whose thresholds are computed using the selected calibration functions, on the set of frames indicated by the user. |
| Calibration: Default Parameters | Load | Load a previously created set of default parameters. Even though the results presented in this paper consider the same set of default parameters, this section allows to increase the applicability field of this code. |
| Calibration: Default Parameters | Create | A window is displayed, where the user can change some of the constant parameters used in the code (e.g., maximum number of clusters in Lab mask function). Even though the results presented in this paper consider the same set of default parameters, this section allows to increase the applicability field of this code. |
| Analysis | Single video | This function allows analyzing a single video. The user is asked to provide the frame step adopted to analyze the video and the time interval between two consecutives frames in the video. The output is a plot of the temporal evolution of plume height, and this information can be saved in the folder Results. |
| Analysis | Folder with images | This function allows analyzing a folder containing images. The user is asked to provide the time interval between two consecutives images. The output is a plot of the temporal evolution of plume height, and this information can be saved in the folder Results. |
| Analysis | Analyze manually | This function allows to select manually the pixel associated with the maximum height on a set of frames (a single video or a folder of images). The output is a plot of the temporal evolution of plume height, and this information can be saved in the folder Results. |
| Results | Single plot | This function allows plotting the results of previously analyzed videos/folders with images. The input of this function is the output file saved by any of the three functions of the section Analysis. |
| Results | Compare plots | This function allows comparing the results of previously analyzed videos/folders with images. The inputs of this function are the output files saved by any of the three functions of the section Analysis. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aravena, A.; Carparelli, G.; Cioni, R.; Prestifilippo, M.; Scollo, S. Toward a Real-Time Analysis of Column Height by Visible Cameras: An Example from Mt. Etna, in Italy. Remote Sens. 2023, 15, 2595. https://doi.org/10.3390/rs15102595
Aravena A, Carparelli G, Cioni R, Prestifilippo M, Scollo S. Toward a Real-Time Analysis of Column Height by Visible Cameras: An Example from Mt. Etna, in Italy. Remote Sensing. 2023; 15(10):2595. https://doi.org/10.3390/rs15102595
Chicago/Turabian StyleAravena, Alvaro, Giuseppe Carparelli, Raffaello Cioni, Michele Prestifilippo, and Simona Scollo. 2023. "Toward a Real-Time Analysis of Column Height by Visible Cameras: An Example from Mt. Etna, in Italy" Remote Sensing 15, no. 10: 2595. https://doi.org/10.3390/rs15102595
APA StyleAravena, A., Carparelli, G., Cioni, R., Prestifilippo, M., & Scollo, S. (2023). Toward a Real-Time Analysis of Column Height by Visible Cameras: An Example from Mt. Etna, in Italy. Remote Sensing, 15(10), 2595. https://doi.org/10.3390/rs15102595