
Mapping Surface Features of an Alpine Glacier through Multispectral and Thermal Drone Surveys

 ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
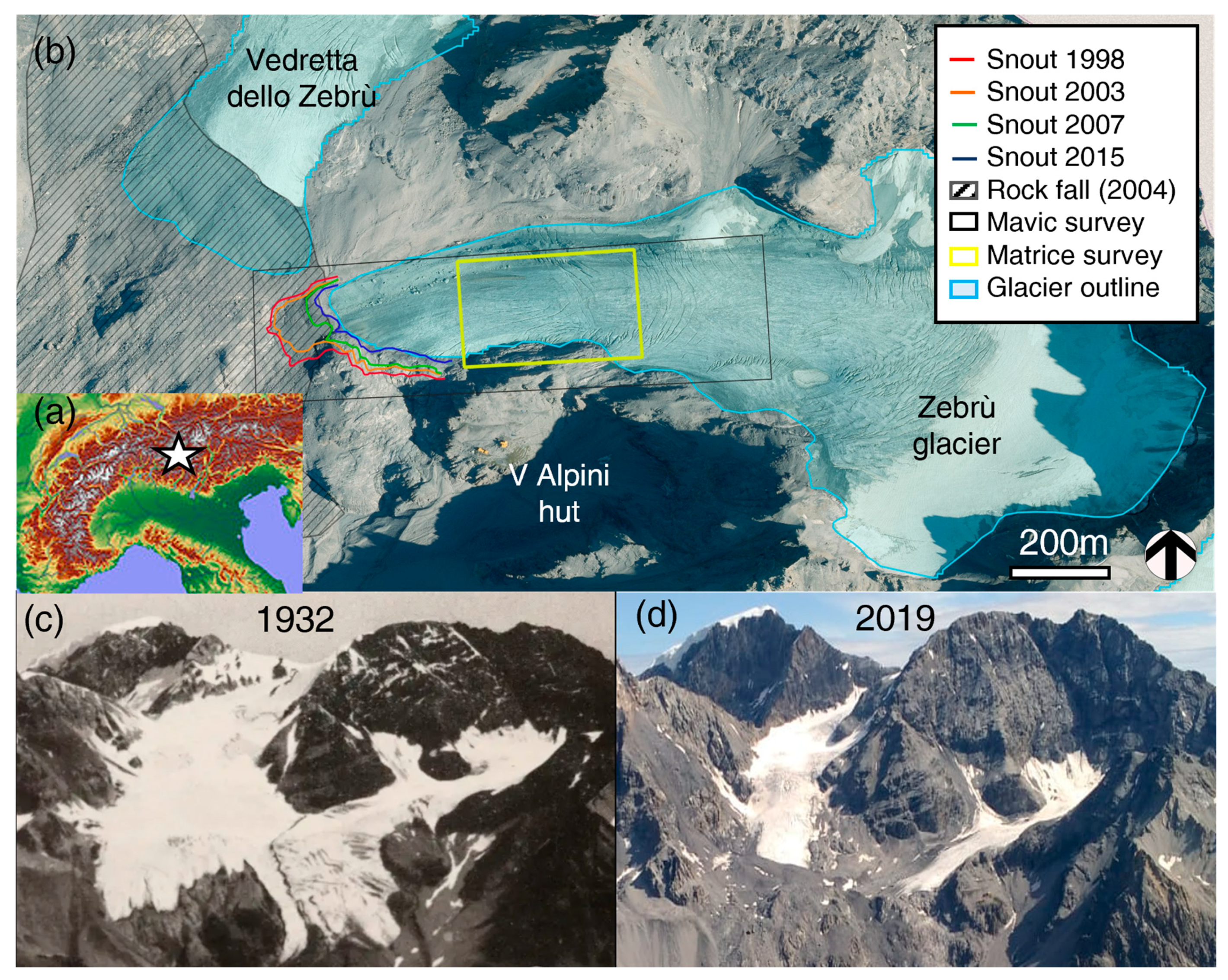
2.1. Study Area
2.2. Drone Platforms and Instruments
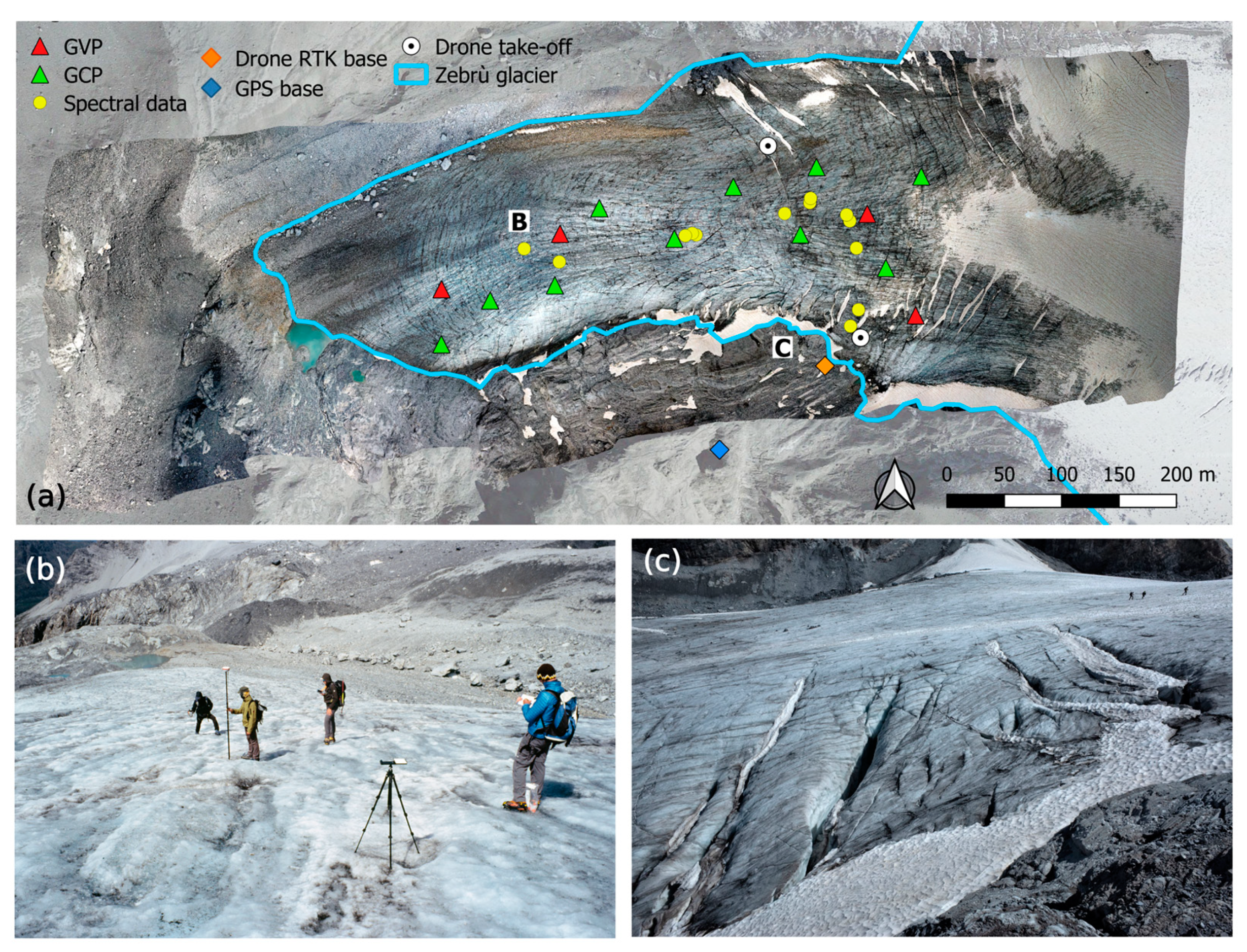
2.3. Ground Data
2.3.1. Ground Control Points
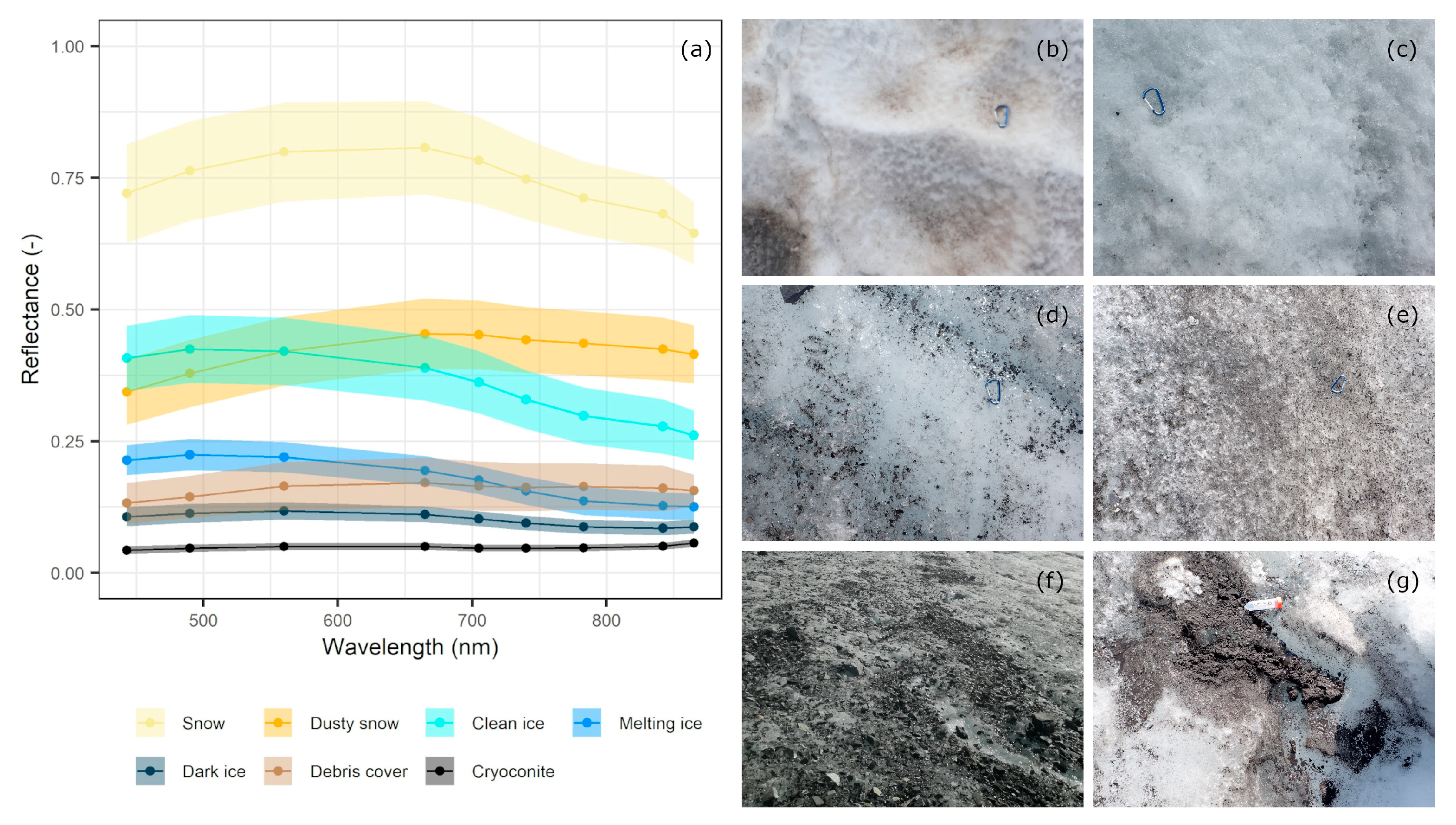
2.3.2. Field Spectroscopy Measurements
2.4. High-Resolution Orthoimage and Digital Surface Model Generation
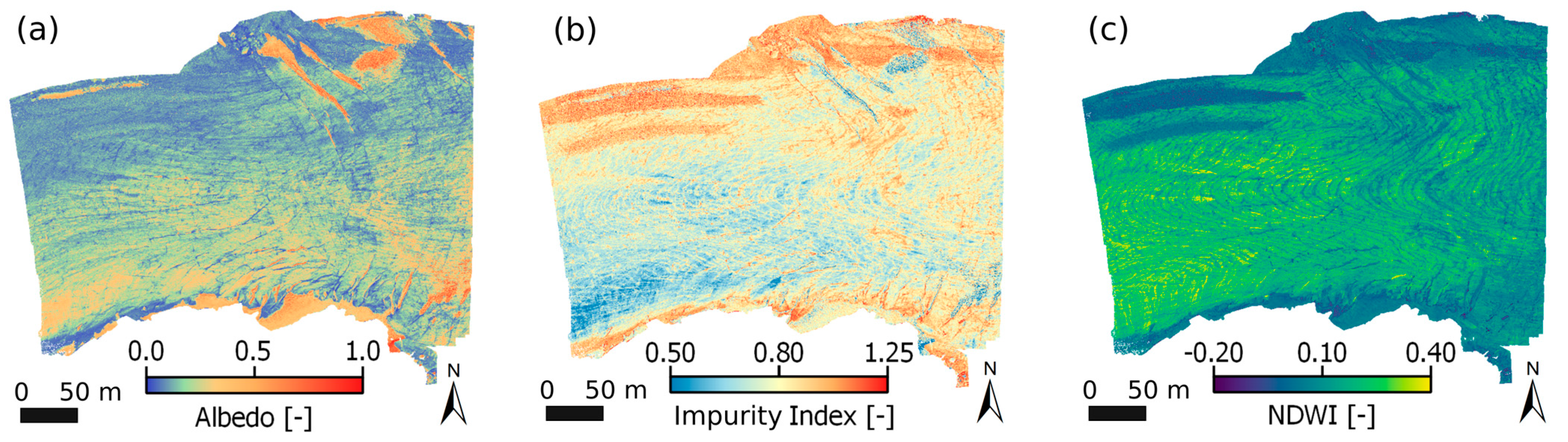
2.5. Multispectral Image Processing and Spectral Index Computation
Classification of the Multispectral Image
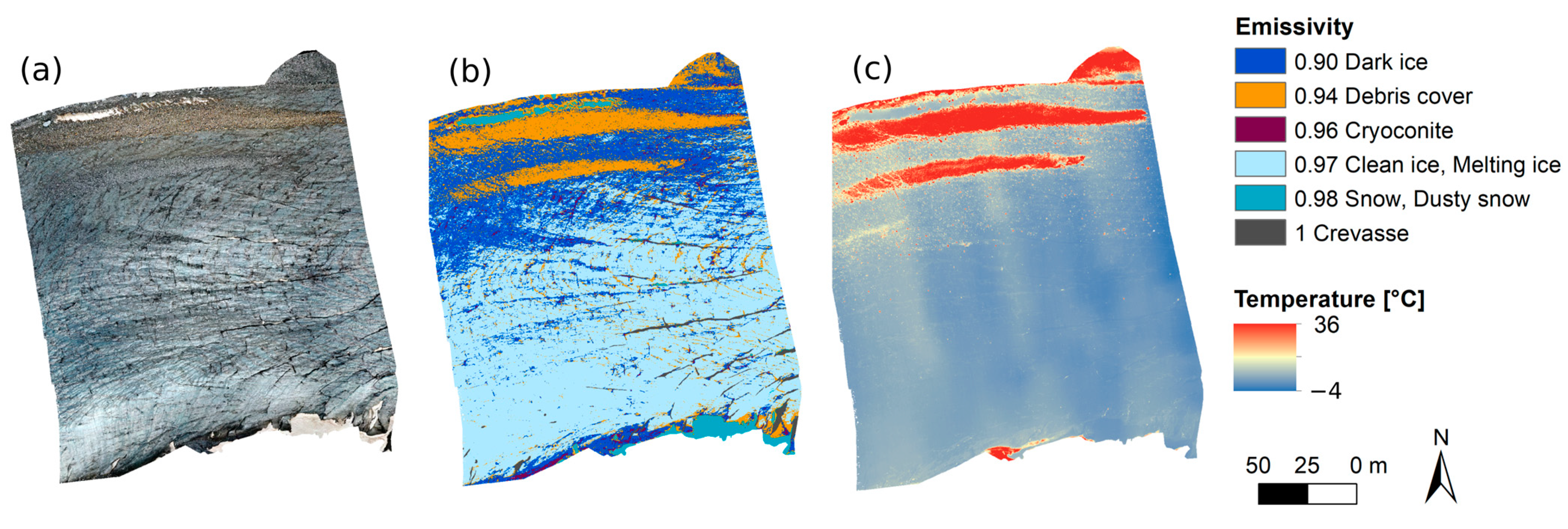
2.6. Thermal Image Processing
3. Results
3.1. Drone Imagery Geometric Accuracy
3.2. Calibration and Validation of Drone Derived Reflectance
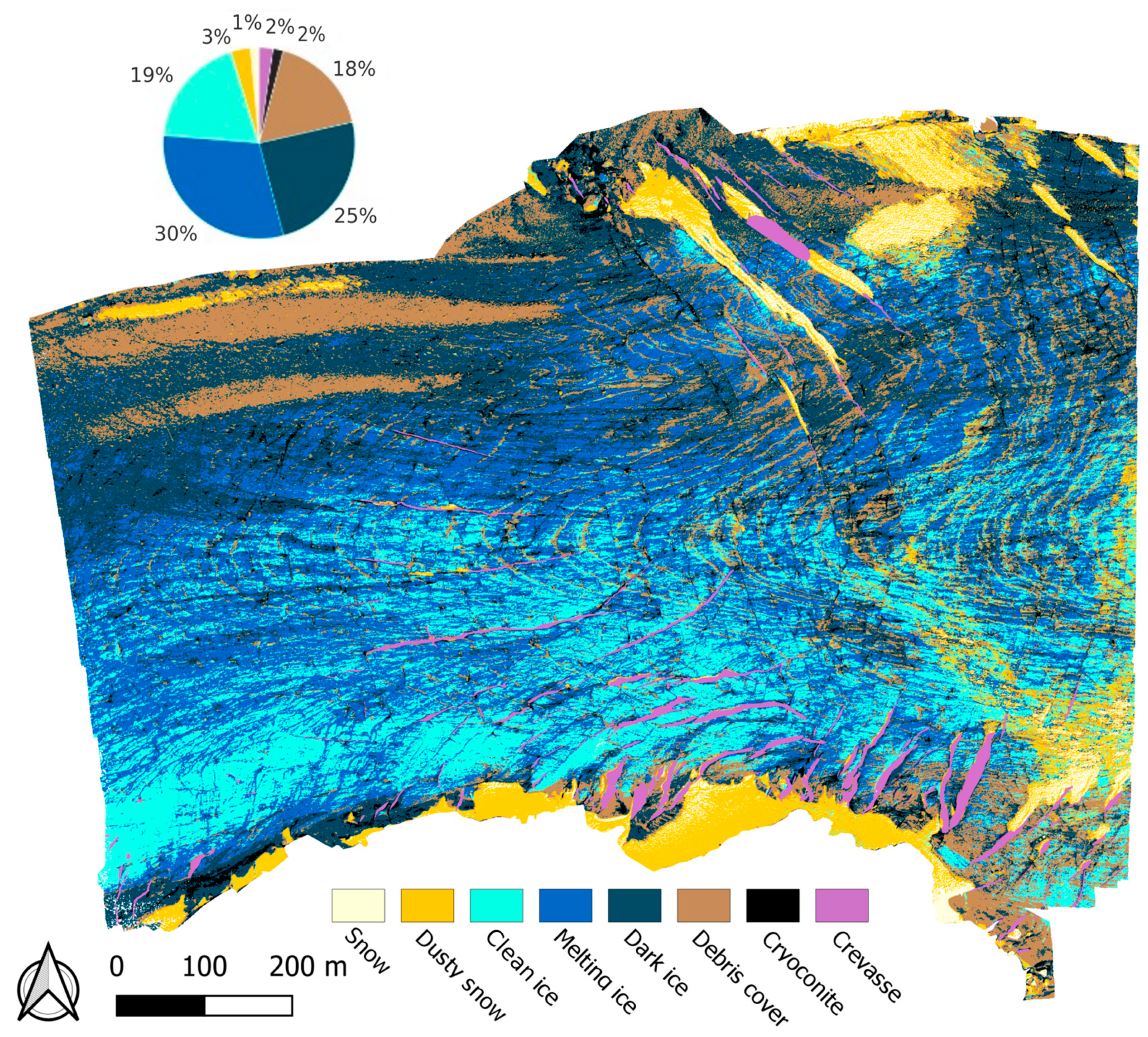
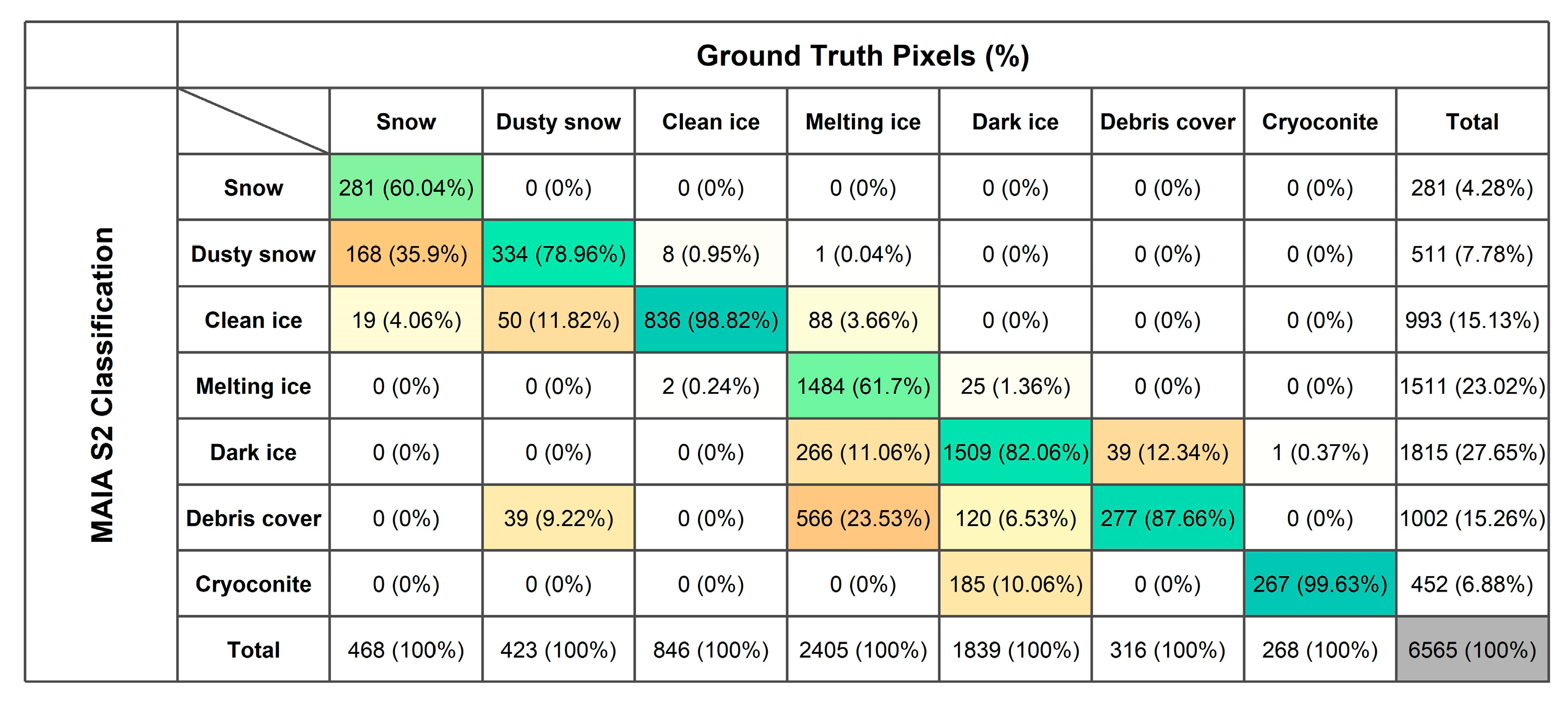
3.3. Classification of the Multispectral Orthomosaics and Accuracy Evaluation
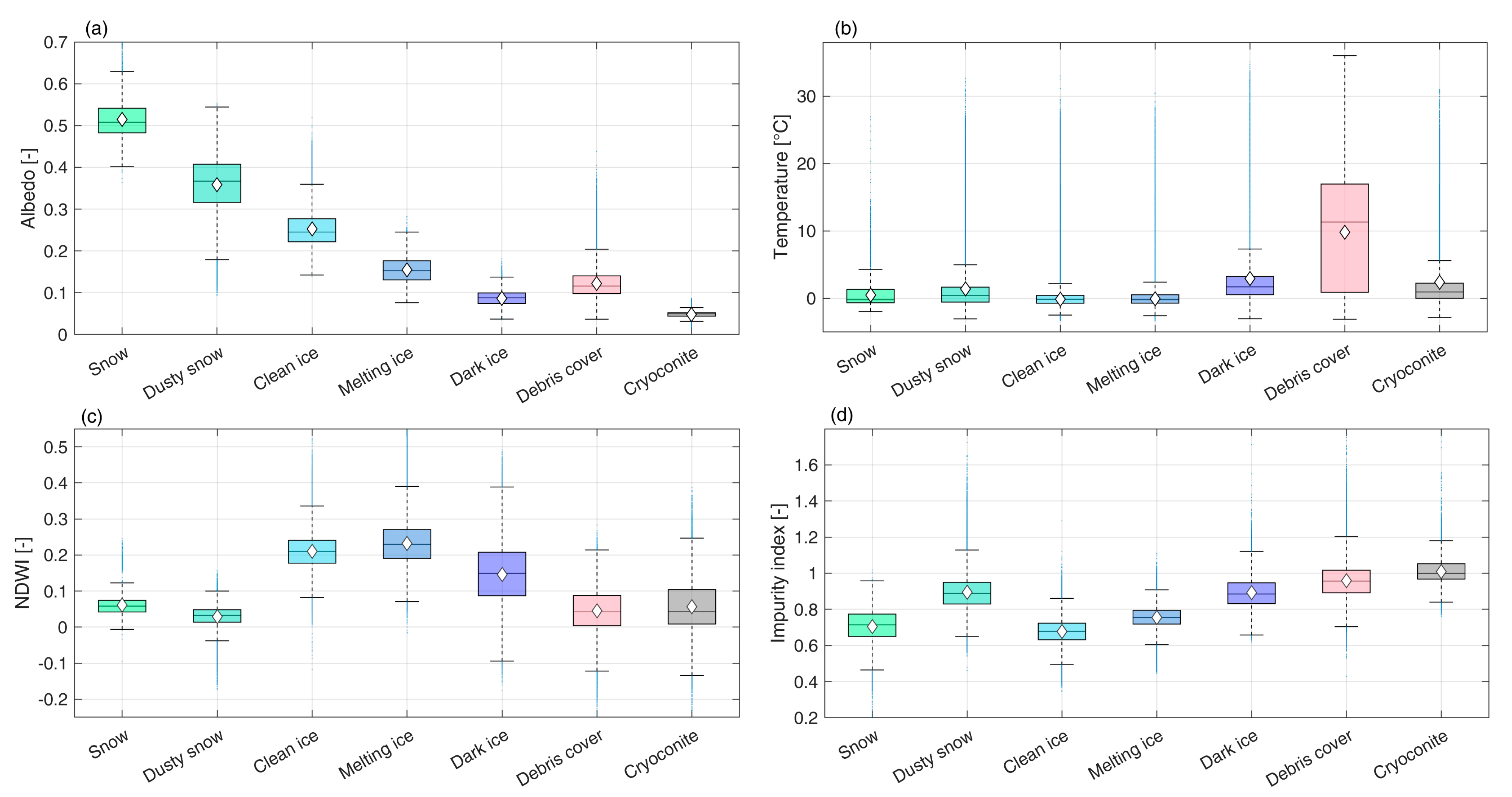
3.4. Relationship between Surface Types, Temperature and Spectral Indices
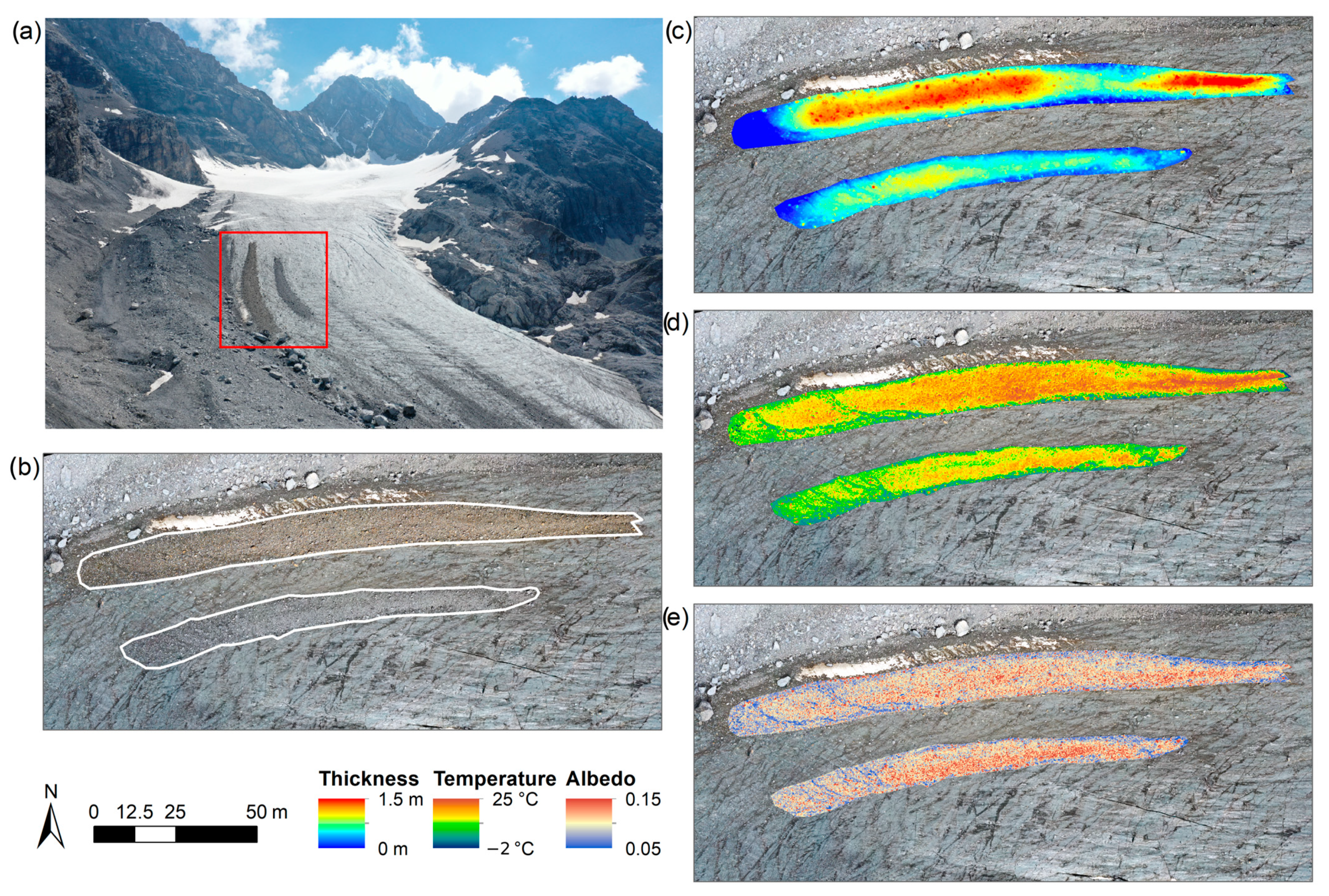
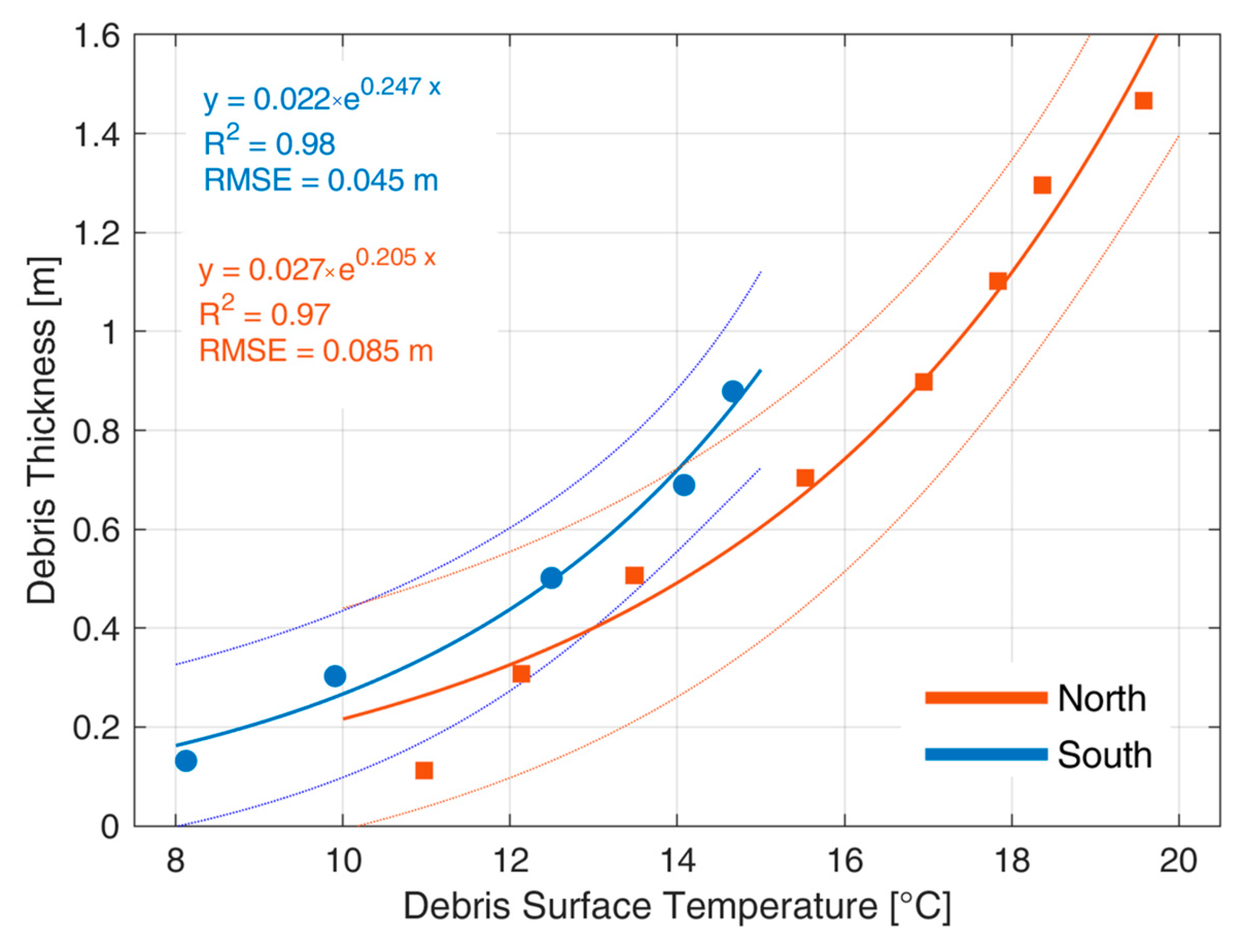
3.5. Relationship between Surface Temperature and Debris Thickness
4. Discussion
4.1. Uncertainty Analysis and Sources of Errors
4.2. Mapping of Glacier Surface Types
4.3. Opportunities of Drone-Derived Thermal Data for Glacier Monitoring
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Paul, F.; Rastner, P.; Azzoni, R.S.; Diolaiuti, G.; Fugazza, D.; Le Bris, R.; Nemec, J.; Rabatel, A.; Ramusovic, M.; Schwaizer, G.; et al. Glacier Shrinkage in the Alps Continues Unabated as Revealed by a New Glacier Inventory from Sentinel-2. Earth Syst. Sci. Data 2020, 12, 1805–1821. [Google Scholar] [CrossRef]
- Zemp, M.; Frey, H.; Gärtner-Roer, I.; Nussbaumer, S.U.; Hoelzle, M.; Paul, F.; Haeberli, W.; Denzinger, F.; Ahlstrøm, A.P.; Anderson, B.; et al. Historically Unprecedented Global Glacier Decline in the Early 21st Century. J. Glaciol. 2015, 61, 745–762. [Google Scholar] [CrossRef] [Green Version]
- Barandun, M.; Bravo, C.; Grobety, B.; Jenk, T.; Fang, L.; Naegeli, K.; Rivera, A.; Cisternas, S.; Münster, T.; Schwikowski, M. Anthropogenic Influence on Surface Changes at the Olivares Glaciers; Central Chile. Sci. Total Environ. 2022, 833, 155068. [Google Scholar] [CrossRef] [PubMed]
- Di Mauro, B.; Fugazza, D. Pan-Alpine Glacier Phenology Reveals Lowering Albedo and Increase in Ablation Season Length. Remote Sens. Environ. 2022, 279, 113119. [Google Scholar] [CrossRef]
- Nakawo, M.; Young, G.J. Estimate of Glacier Ablation under a Debris Layer from Surface Temperature and Meteorological Variables. J. Glaciol. 1982, 28, 29–34. [Google Scholar] [CrossRef] [Green Version]
- Mihalcea, C.; Mayer, C.; Diolaiuti, G.; Lambrecht, A.; Smiraglia, C.; Tartari, G. Ice Ablation and Meteorological Conditions on the Debris-Covered Area of Baltoro Glacier, Karakoram, Pakistan. Ann. Glaciol. 2006, 43, 292–300. [Google Scholar] [CrossRef] [Green Version]
- Di Mauro, B.; Baccolo, G.; Garzonio, R.; Giardino, C.; Massabò, D.; Piazzalunga, A.; Rossini, M.; Colombo, R. Impact of Impurities and Cryoconite on the Optical Properties of the Morteratsch Glacier (Swiss Alps). Cryosphere 2017, 11, 2393–2409. [Google Scholar] [CrossRef] [Green Version]
- Rozwalak, P.; Podkowa, P.; Buda, J.; Niedzielski, P.; Kawecki, S.; Ambrosini, R.; Azzoni, R.S.; Baccolo, G.; Ceballos, J.L.; Cook, J.; et al. Cryoconite—From Minerals and Organic Matter to Bioengineered Sediments on Glacier’s Surfaces. Sci. Total Environ. 2022, 807, 150874. [Google Scholar] [CrossRef]
- Paul, F.; Kääb, A.; Haeberli, W. Recent Glacier Changes in the Alps Observed by Satellite: Consequences for Future Monitoring Strategies. Glob. Planet. Chang. 2007, 56, 111–122. [Google Scholar] [CrossRef]
- Naegeli, K.; Huss, M.; Hoelzle, M. Change Detection of Bare-Ice Albedo in the Swiss Alps. Cryosphere 2019, 13, 397–412. [Google Scholar] [CrossRef] [Green Version]
- Arendt, A. Approaches to Modelling the Surface Albedo of a High Arctic Glacier. Geogr. Ann. Ser. A Phys. Geogr. 1999, 81, 477–487. [Google Scholar] [CrossRef]
- Pope, E.L.; Willis, I.C.; Pope, A.; Miles, E.S.; Arnold, N.S.; Rees, W.G. Contrasting Snow and Ice Albedos Derived from MODIS, Landsat ETM+ and Airborne Data from Langjökull, Iceland. Remote Sens. Environ. 2016, 175, 183–195. [Google Scholar] [CrossRef] [Green Version]
- Wehrlé, A.; Box, J.E.; Niwano, M.; Anesio, A.M.; Fausto, R.S. Greenland Bare-Ice Albedo from PROMICE Automatic Weather Station Measurements and Sentinel-3 Satellite Observations. GEUS Bull. 2021, 47, 1–9. [Google Scholar] [CrossRef]
- Hartl, L.; Felbauer, L.; Schwaizer, G.; Fischer, A. Small-Scale Spatial Variability in Bare-Ice Reflectance at Jamtalferner, Austria. Cryosphere 2020, 14, 4063–4081. [Google Scholar] [CrossRef]
- Naegeli, K.; Huss, M. Sensitivity of Mountain Glacier Mass Balance to Changes in Bare-Ice Albedo. Ann. Glaciol. 2017, 58, 119–129. [Google Scholar] [CrossRef] [Green Version]
- Naegeli, K.; Damm, A.; Huss, M.; Schaepman, M.; Hoelzle, M. Imaging Spectroscopy to Assess the Composition of Ice Surface Materials and Their Impact on Glacier Mass Balance. Remote Sens. Environ. 2015, 168, 388–402. [Google Scholar] [CrossRef]
- Klok, E.J.; Greuell, W.; Oerlemans, J. Temporal and Spatial Variation of the Surface Albedo of Morteratschgletscher, Switzerland, as Derived from 12 Landsat Images. J. Glaciol. 2004, 49, 491–502. [Google Scholar] [CrossRef] [Green Version]
- Arnold, N.S.; Willis, I.C.; Sharp, M.J.; Richards, K.S.; Lawson, W.J. A Distributed Surface Energy-Balance Model for a Small Valley Glacier. I. Development and Testing for Haut Glacier d’ Arolla, Valais, Switzerland. J. Glaciol. 1996, 42, 77–89. [Google Scholar] [CrossRef] [Green Version]
- Klok, E.J.; Oerlemans, J. Model Study of the Spatial Distribution of the Energy and Mass Balance of Morteratschgletscher, Switzerland. J. Glaciol. 2002, 48, 505–518. [Google Scholar] [CrossRef] [Green Version]
- Tarca, G.; Guglielmin, M. Evolution of the Sparse Debris Cover during the Ablation Season at Two Small Alpine Glaciers (Gran Zebrù and Sforzellina, Ortles-Cevedale Group). Geomorphology 2022, 409, 108268. [Google Scholar] [CrossRef]
- Bozhinskiy, A.N.; Krass, M.S.; Popovnin, V.V. Role of Debris Cover in the Thermal Physics of Glaciers. J. Glaciol. 1986, 32, 255–266. [Google Scholar] [CrossRef] [Green Version]
- Owen, L.A.; Derbyshire, E.; Scott, C.H. Contemporary sediment production and transfer in high-altitude glaciers. Sediment. Geol. 2003, 155, 13–36. [Google Scholar] [CrossRef] [Green Version]
- Reznichenko, N.; Davies, T.; Shulmeister, J.; McSaveney, M. Effects of Debris on Ice-Surface Melting Rates: An Experimental Study. J. Glaciol. 2010, 56, 384–394. [Google Scholar] [CrossRef] [Green Version]
- Rounce, D.R.; Hock, R.; McNabb, R.W.; Millan, R.; Sommer, C.; Braun, M.H.; Malz, P.; Maussion, F.; Mouginot, J.; Seehaus, T.C.; et al. Distributed Global Debris Thickness Estimates Reveal Debris Significantly Impacts Glacier Mass Balance. Geophys. Res. Lett. 2021, 48, e2020GL091311. [Google Scholar] [CrossRef]
- Fugazza, D.; Senese, A.; Azzoni, R.S.; Maugeri, M.; Maragno, D.; Diolaiuti, G.A. New Evidence of Glacier Darkening in the Ortles-Cevedale Group from Landsat Observations. Glob. Planet. Chang. 2019, 178, 35–45. [Google Scholar] [CrossRef]
- Konig, M.; Winther, J.; Isaksson, E. From and Glacier Satellite. Rev. Geophys. 2001, 29, 1–27. [Google Scholar] [CrossRef]
- Gaffey, C.; Bhardwaj, A. Applications of Unmanned Aerial Vehicles in Cryosphere: Latest Advances and Prospects. Remote Sens. 2020, 12, 948. [Google Scholar] [CrossRef] [Green Version]
- Bhardwaj, A.; Sam, L.; Akanksha; Martín-Torres, F.J.; Kumar, R. UAVs as Remote Sensing Platform in Glaciology: Present Applications and Future Prospects. Remote Sens. Environ. 2016, 175, 196–204. [Google Scholar] [CrossRef]
- Immerzeel, W.W.; Kraaijenbrink, P.D.A.; Shea, J.M.; Shrestha, A.B.; Pellicciotti, F.; Bierkens, M.F.P.; De Jong, S.M. High-Resolution Monitoring of Himalayan Glacier Dynamics Using Unmanned Aerial Vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Jawak, S.D.; Wankhede, S.F.; Luis, A.J.; Balakrishna, K. Multispectral Characteristics of Glacier Surface Facies (Chandra-Bhaga Basin, Himalaya, and Ny-Ålesund, Svalbard) through Investigations of Pixel and Object-Based Mapping Using Variable Processing Routines. Remote Sens. 2022, 14, 6311. [Google Scholar] [CrossRef]
- Ryan, J.C.; Hubbard, A.; Stibal, M.; Irvine-Fynn, T.D.; Cook, J.; Smith, L.C.; Cameron, K.; Box, J. Dark Zone of the Greenland Ice Sheet Controlled by Distributed Biologically-Active Impurities. Nat. Commun. 2018, 9, 1065. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bearzot, F.; Garzonio, R.; Di Mauro, B.; Colombo, R.; Cremonese, E.; Crosta, G.B.; Delaloye, R.; Hauck, C.; Morra Di Cella, U.; Pogliotti, P.; et al. Kinematics of an Alpine Rock Glacier from Multi-Temporal UAV Surveys and GNSS Data. Geomorphology 2022, 402, 108116. [Google Scholar] [CrossRef]
- Bearzot, F.; Garzonio, R.; Colombo, R.; Crosta, G.B.; Di Mauro, B.; Fioletti, M.; Di Cella, U.M.; Rossini, M. Flow Velocity Variations and Surface Change of the Destabilised Plator Rock Glacier (Central Italian Alps) from Aerial Surveys. Remote Sens. 2022, 14, 635. [Google Scholar] [CrossRef]
- Cook, K.L. An Evaluation of the Effectiveness of Low-Cost UAVs and Structure from Motion for Geomorphic Change Detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Benoit, L.; Gourdon, A.; Vallat, R.; Irarrazaval, I.; Gravey, M.; Lehmann, B.; Prasicek, G.; Gräff, D.; Herman, F.; Mariethoz, G. A High-Resolution Image Time Series of the Gorner Glacier—Swiss Alps—Derived from Repeated Unmanned Aerial Vehicle Surveys. Earth Syst. Sci. Data 2019, 11, 579–588. [Google Scholar] [CrossRef] [Green Version]
- Rossini, M.; Di Mauro, B.; Garzonio, R.; Baccolo, G.; Cavallini, G.; Mattavelli, M.; De Amicis, M.; Colombo, R. Rapid Melting Dynamics of an Alpine Glacier with Repeated UAV Photogrammetry. Geomorphology 2018, 304, 159–172. [Google Scholar] [CrossRef]
- Tedstone, A.J.; Cook, J.M.; Williamson, C.J.; Hofer, S.; McCutcheon, J.; Irvine-Fynn, T.; Gribbin, T.; Tranter, M. Algal Growth and Weathering Crust State Drive Variability in Western Greenland Ice Sheet Ice Albedo. Cryosphere 2020, 14, 521–538. [Google Scholar] [CrossRef] [Green Version]
- Cook, J.M.; Tedstone, A.J.; Williamson, C.; McCutcheon, J.; Hodson, A.J.; Dayal, A.; Skiles, M.; Hofer, S.; Bryant, R.; McAree, O.; et al. Glacier Algae Accelerate Melt Rates on the South-Western Greenland Ice Sheet. Cryosphere 2020, 14, 309–330. [Google Scholar] [CrossRef] [Green Version]
- Healy, S.M.; Khan, A.L. Albedo Change from Snow Algae Blooms Can Contribute Substantially to Snow Melt in the North Cascades, USA. Commun. Earth Environ. 2023, 4, 142. [Google Scholar] [CrossRef]
- Forte, E.; Santin, I.; Ponti, S.; Colucci, R.R.; Gutgesell, P.; Guglielmin, M. New Insights in Glaciers Characterization by Differential Diagnosis Integrating GPR and Remote Sensing Techniques: A Case Study for the Eastern Gran Zebrù Glacier (Central Alps). Remote Sens. Environ. 2021, 267, 112715. [Google Scholar] [CrossRef]
- Kraaijenbrink, P.D.A.; Shea, J.M.; Litt, M.; Steiner, J.F.; Treichler, D.; Koch, I.; Immerzeel, W.W. Mapping Surface Temperatures on a Debris-Covered Glacier with an Unmanned Aerial Vehicle. Front. Earth Sci. 2018, 6, 64. [Google Scholar] [CrossRef] [Green Version]
- Herreid, S. What Can Thermal Imagery Tell Us About Glacier Melt Below Rock Debris? Front. Earth Sci. 2021, 9, 681059. [Google Scholar] [CrossRef]
- Tarca, G.; Guglielmin, M. Using Ground-Based Thermography to Analyse Surface Temperature Distribution and Estimate Debris Thickness on Gran Zebrù Glacier (Ortles-Cevedale, Italy). Cold Reg. Sci. Technol. 2022, 196, 103487. [Google Scholar] [CrossRef]
- Gök, D.T.; Scherler, D.; Anderson, L.S. High-resolution debris-cover mapping using UAV-derived thermal imagery: Limits and opportunities. Cryosphere 2023, 17, 1165–1184. [Google Scholar] [CrossRef]
- Aubry-Wake, C.; Lamontagne-Hallé, P.; Baraër, M.; McKenzie, J.M.; Pomeroy, J.W. Using Ground-Based Thermal Imagery to Estimate Debris Thickness over Glacial Ice: Fieldwork Considerations to Improve the Effectiveness. J. Glaciol. 2023, 69, 353–369. [Google Scholar] [CrossRef]
- Mihalcea, C.; Mayer, C.; Diolaiuti, G.; D’Agata, C.; Smiraglia, C.; Lambrecht, A.; Vuillermoz, E.; Tartari, G. Spatial Distribution of Debris Thickness and Melting from Remote-Sensing and Meteorological Data, at Debris-Covered Baltoro Glacier, Karakoram, Pakistan. Ann. Glaciol. 2008, 48, 49–57. [Google Scholar] [CrossRef] [Green Version]
- Desio, A.; Belloni, S.; Giorcelli, A. I Ghiacciai Del Gruppo Ortles-Cevedale: (Alpi Centrali); Comitato Glaciologico Italiano: Torino, Italy, 1967. [Google Scholar]
- Frattini, P.; Riva, F.; Crosta, G.B.; Scotti, R.; Greggio, L.; Brardinoni, F.; Fusi, N. Rock-Avalanche Geomorphological and Hydrological Impact on an Alpine Watershed. Geomorphology 2016, 262, 47–60. [Google Scholar] [CrossRef]
- Frank, P.; Rastner, P.; Azzoni, R.S.; Diolaiuti, G.; Fugazza, D.; Le Bris, R.; Nemec, J.; Rabatel, A.; Ramusovic, M.; Schwaizer, G.; et al. Glacier Inventory of the Alps from Sentinel-2, Shape Files. PANGEA 2019.
- Nocerino, E.; Dubbini, M.; Menna, F.; Remondino, F.; Gattelli, M.; Covi, D. Geometric Calibration and Radiometric Correction of the Maia Multispectral Camera. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2017, 42, 149–156. [Google Scholar] [CrossRef] [Green Version]
- Dubbini, M.; Pezzuolo, A.; De Giglio, M.; Gattelli, M.; Curzio, L.; Covi, D.; Yezekyan, T.; Marinello, F. Last Generation Instrument for Agriculture Multispectral Data Collection. Agric. Eng. Int. CIGR J. 2017, 19, 87–93. [Google Scholar]
- Hegarty, C.J.; Chatre, E. This Growing Civil Aviation System Is Expected to Replace a Significant Number of Ground Based Navigation Systems and Allow for More Efficient Use of the World Wide Airspace. Proc. IEEE 2008, 96, 1902–1917. [Google Scholar] [CrossRef]
- Fawcett, D.; Panigada, C.; Tagliabue, G.; Boschetti, M.; Celesti, M.; Evdokimov, A.; Biriukova, K.; Colombo, R.; Miglietta, F.; Rascher, U.; et al. Multi-Scale Evaluation of Drone-Based Multispectral Surface Reflectance and Vegetation Indices in Operational Conditions. Remote Sens. 2020, 12, 514. [Google Scholar] [CrossRef] [Green Version]
- Lucieer, A.; de Jong, S.M.; Turner, D. Mapping Landslide Displacements Using Structure from Motion (SfM) and Image Correlation of Multi-Temporal UAV Photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Verhoeven, G. Taking Computer Vision Aloft—Archaeological Three-Dimensional Reconstructions from Aerial Photographs with Photoscan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy Assessment of Digital Surface Models from Unmanned Aerial Vehicles’ Imagery on Glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef] [Green Version]
- Smith, G.M.; Milton, E.J. The Use of the Empirical Line Method to Calibrate Remotely Sensed Data to Reflectance. Int. J. Remote Sens. 1999, 20, 2653–2662. [Google Scholar] [CrossRef]
- Naegeli, K.; Damm, A.; Huss, M.; Wulf, H.; Schaepman, M.; Hoelzle, M. Cross-Comparison of Albedo Products for Glacier Surfaces Derived from Airborne and Satellite (Sentinel-2 and Landsat 8) Optical Data. Remote Sens. 2017, 9, 110. [Google Scholar] [CrossRef] [Green Version]
- Dumont, M.; Brun, E.; Picard, G.; Michou, M.; Libois, Q.; Petit, J.R.; Geyer, M.; Morin, S.; Josse, B. Contribution of Light-Absorbing Impurities in Snow to Greenland’s Darkening since 2009. Nat. Geosci. 2014, 7, 509–512. [Google Scholar] [CrossRef]
- Gao, B.C. NDWI—A Normalized Difference Water Index for Remote Sensing of Vegetation Liquid Water from Space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V.; Saitta, L. Support-Vector Networks Editor; Kluwer Academic Publishers: Alphen aan den Rijn, The Netherlands, 1995; Volume 20. [Google Scholar]
- Vapnik, V. Special Issue on Information Utilizing Technologies for Value Creation Universal Learning Technology: Support Vector Machines; NEC Laboratories America, Inc.: Princeton, NJ, USA, 2005; Volume 2. [Google Scholar]
- Thanh Noi, P.; Kappas, M. Comparison of Random Forest, k-Nearest Neighbor, and Support Vector Machine Classifiers for Land Cover Classification Using Sentinel-2 Imagery. Sensors 2017, 18, 18. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Story, M.; Congalton, R.G. Accuracy Assessment: A User’s Perspective. Photogramm. Eng. Remote Sens. 1986, 52, 397–399. [Google Scholar]
- Rivard, B.; Thomas, P.J.; Giroux, J. Precise emissivity of rock samples. Remote Sens. Environ. 1995, 54, 152–160. [Google Scholar] [CrossRef]
- Hori, M.; Aoki, T.; Tanikawa, T.; Motoyoshi, H.; Hachikubo, A.; Sugiura, K.; Yasunari, T.J.; Eide, H.; Storvold, R.; Nakajima, Y.; et al. In-Situ Measured Spectral Directional Emissivity of Snow and Ice in the 8-14 Μm Atmospheric Window. Remote Sens. Environ. 2006, 100, 486–502. [Google Scholar] [CrossRef]
- Gribbon, P.W.F. Cryoconite Holes on Sermikavsak, West Greenland. J. Glaciol. 1979, 22, 177–181. [Google Scholar] [CrossRef] [Green Version]
- Salisbury, J.W.; D’Aria, D.M. Emissivity of Terrestrial Materials in the 8-14/Tm Atmospheric Window. Remote Sens. Environ. 1992, 42, 83–106. [Google Scholar] [CrossRef]
- Jin, M.; Liang, S. An Improved Land Surface Emissivity Parameter for Land Surface Models Using Global Remote Sensing Observations. J. Clim. 2006, 19, 2867–2881. [Google Scholar] [CrossRef]
- Di Mauro, B.; Fava, F.; Ferrero, L.; Garzonio, R.; Baccolo, G.; Delmonte, B.; Colombo, R. Mineral Dust Impact on Snow Radiative Properties in the European Alps Combining Ground, UAV, and Satellite Observations. J. Geophys. Res. 2015, 120, 6080–6097. [Google Scholar] [CrossRef]
- Li, Y.; Kang, S.; Yan, F.; Chen, J.; Wang, K.; Paudyal, R.; Liu, J.; Qin, X.; Sillanpää, M. Cryoconite on a Glacier on the North-Eastern Tibetan Plateau: Light-Absorbing Impurities, Albedo and Enhanced Melting. J. Glaciol. 2019, 65, 633–644. [Google Scholar] [CrossRef] [Green Version]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Suomalainen, J.; Oliveira, R.A.; Hakala, T.; Koivumäki, N.; Markelin, L.; Näsi, R.; Honkavaara, E. Direct Reflectance Transformation Methodology for Drone-Based Hyperspectral Imaging. Remote Sens. Environ. 2021, 266, 112691. [Google Scholar] [CrossRef]
- Suomalainen, J.; Hakala, T.; de Oliveira, R.A.; Markelin, L.; Viljanen, N.; Näsi, R.; Honkavaara, E. A Novel Tilt Correction Technique for Irradiance Sensors and Spectrometers On-Board Unmanned Aerial Vehicles. Remote Sens. 2018, 10, 2068. [Google Scholar] [CrossRef] [Green Version]
- Naethe, P.; Asgari, M.; Kneer, C.; Knieps, M.; Jenal, A.; Weber, I.; Moelter, T.; Dzunic, F.; Deffert, P.; Rommel, E.; et al. Calibration and Validation from Ground to Airborne and Satellite Level: Joint Application of Time-Synchronous Field Spectroscopy, Drone, Aircraft and Sentinel-2 Imaging. PFG-J. Photogramm. Remote Sens. Geoinf. Sci. 2023, 91, 43–58. [Google Scholar] [CrossRef]
- Padró, J.C.; Muñoz, F.J.; Ávila, L.Á.; Pesquer, L.; Pons, X. Radiometric Correction of Landsat-8 and Sentinel-2A Scenes Using Drone Imagery in Synergy with Field Spectroradiometry. Remote Sens. 2018, 10, 1687. [Google Scholar] [CrossRef] [Green Version]
- Poncet, A.M.; Knappenberger, T.; Brodbeck, C.; Fogle, M.; Shaw, J.N.; Ortiz, B.V. Multispectral UAS Data Accuracy for Different Radiometric Calibration Methods. Remote Sens. 2019, 11, 1917. [Google Scholar] [CrossRef] [Green Version]
- Kelly, J.; Kljun, N.; Olsson, P.O.; Mihai, L.; Liljeblad, B.; Weslien, P.; Klemedtsson, L.; Eklundh, L. Challenges and Best Practices for Deriving Temperature Data from an Uncalibrated UAV Thermal Infrared Camera. Remote Sens. 2019, 11, 567. [Google Scholar] [CrossRef] [Green Version]
- Virtue, J.; Turner, D.; Williams, G.; Zeliadt, S.; McCabe, M.; Lucieer, A. Thermal Sensor Calibration for Unmanned Aerial Systems Using an External Heated Shutter. Drones 2021, 5, 119. [Google Scholar] [CrossRef]
- Aragon, B.; Johansen, K.; Parkes, S.; Malbeteau, Y.; Al-mashharawi, S.; Al-amoudi, T.; Andrade, C.F.; Turner, D.; Lucieer, A.; McCabe, M.F. A Calibration Procedure for Field and Uav-based Uncooled Thermal Infrared Instruments. Sensors 2020, 20, 3316. [Google Scholar] [CrossRef]
- Aubry-Wake, C.; Baraer, M.; McKenzie, J.M.; Mark, B.G.; Wigmore, O.; Hellström, R.; Lautz, L.; Somers, L. Measuring Glacier Surface Temperatures with Ground-Based Thermal Infrared Imaging. Geophys. Res. Lett. 2015, 42, 8489–8497. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.H.; Huete, A.R.; Steppe, K. Optimizing the Processing of UAV-Based Thermal Imagery. Remote Sens. 2017, 9, 476. [Google Scholar] [CrossRef] [Green Version]
- Blanco-Sacristán, J.; Panigada, C.; Gentili, R.; Tagliabue, G.; Garzonio, R.; Martín, M.P.; Ladrón de Guevara, M.; Colombo, R.; Dowling, T.P.F.; Rossini, M. UAV RGB, Thermal Infrared and Multispectral Imagery Used to Investigate the Control of Terrain on the Spatial Distribution of Dryland Biocrust. Earth Surf. Process. Landf. 2021, 46, 2466–2484. [Google Scholar] [CrossRef] [PubMed]
- Di Mauro, B.; Garzonio, R.; Baccolo, G.; Franzetti, A.; Pittino, F.; Leoni, B.; Remias, D.; Colombo, R.; Rossini, M. Glacier Algae Foster Ice-Albedo Feedback in the European Alps. Sci. Rep. 2020, 10, 4739. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Tricht, L.; Huybrechts, P.; Van Breedam, J.; Vanhulle, A.; Van Oost, K.; Zekollari, H. Estimating Surface Mass Balance Patterns from Unoccupied Aerial Vehicle Measurements in the Ablation Area of the Morteratsch-Pers Glacier Complex (Switzerland). Cryosphere 2021, 15, 4445–4464. [Google Scholar] [CrossRef]
- Vincent, C.; Dumont, M.; Six, D.; Brun, F.; Picard, G.; Arnaud, L. Why Do the Dark and Light Ogives of Forbes Bands Have Similar Surface Mass Balances? J. Glaciol. 2018, 64, 236–246. [Google Scholar] [CrossRef] [Green Version]
- Dozier, J.; Green, R.O.; Nolin, A.W.; Painter, T.H. Interpretation of Snow Properties from Imaging Spectrometry. Remote Sens. Environ. 2009, 113, S25–S37. [Google Scholar] [CrossRef]
- Kokhanovsky, A.; Di Mauro, B.; Garzonio, R.; Colombo, R. Retrieval of Dust Properties From Spectral Snow Reflectance Measurements. Front. Environ. Sci. 2021, 9, 644551. [Google Scholar] [CrossRef]
- Bohn, N.; Di Mauro, B.; Colombo, R.; Thompson, D.R.; Susiluoto, J.; Carmon, N.; Turmon, M.J.; Guanter, L. Glacier Ice Surface Properties in South-West Greenland Ice Sheet: First Estimates From PRISMA Imaging Spectroscopy Data. J. Geophys. Res. Biogeosci. 2022, 127, e2021JG006718. [Google Scholar] [CrossRef]
- Hori, M.; Aoki, T.; Tanikawa, T.; Hachikubo, A.; Sugiura, K.; Kuchiki, K.; Niwano, M. Modeling Angular-Dependent Spectral Emissivity of Snow and Ice in the Thermal Infrared Atmospheric Window. Appl. Opt. 2013, 52, 7243–7255. [Google Scholar] [CrossRef]
- Colombo, R.; Pennati, G.; Pozzi, G.; Garzonio, R.; Di Mauro, B.; Giardino, C.; Cogliati, S.; Rossini, M.; Maltese, A.; Pogliotti, P.; et al. Mapping Snow Density through Thermal Inertia Observations. Remote Sens. Environ. 2023, 284, 113323. [Google Scholar] [CrossRef]
- Bisset, R.R.; Nienow, P.W.; Goldberg, D.N.; Wigmore, O.; Loayza-Muro, R.A.; Wadham, J.L.; Macdonald, M.L.; Bingham, R.G. Using Thermal UAV Imagery to Model Distributed Debris Thicknesses and Sub-Debris Melt Rates on Debris-Covered Glaciers. J. Glaciol. 2022, 1–16. [Google Scholar] [CrossRef]
- Nicholson, L.I.; McCarthy, M.; Pritchard, H.D.; Willis, I. Supraglacial Debris Thickness Variability: Impact on Ablation and Relation to Terrain Properties. Cryosphere 2018, 12, 3719–3734. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Type | Lateral Overlap | Longitudinal Overlap | Distance between Flight Lines (m) | Distance between Images (m) |
|---|---|---|---|---|
| RGB | 75% | 85% | 22 | 20 |
| Multispectral | 75% | 90% | 14 | 4 |
| TIR | 73% | 80% | 14 | 8 |
| Flight | Sensor | Date of Acquisition | Start Time (UTC) | Duration of Each Flight (min) | Total Number of Images | Average Altitude (m a.g.l. 1) | Average GSD 2 (cm) | Total Area Covered (km2) |
|---|---|---|---|---|---|---|---|---|
| 1–4 | RGB camera | 30 July 2020 | 10:58 | 9 | 1116 | 84.03 | 1.84 | 0.244 |
| 5–7 | MAIA S2/XT2 thermal | 29 July 2020 | 11:52 | 12 | 1202/1248 | 80-85-95 | 4.25/8 | 0.075 |
| Index | Formulation | Target | Reference |
|---|---|---|---|
| Surface albedo | 0.726R560 – 0.322 – 0.015R842 – 0.581 | Snow and ice brightness | [60] |
| Impurity index | ln(R560)/ln(R842) | Impurities in snow and ice | [61] |
| Normalized difference water index (NDWI) | (R560 – R842)/(R560 + R842) | Liquid water on surface ice | [62] |
| Class | Emissivity Value | References |
|---|---|---|
| Snow and dusty snow | 0.98 | [67,68] |
| Clean ice and melting ice | 0.97 | [41,67,68] |
| Dark ice | 0.90 | [69] |
| Debris cover | 0.94 | [41,70] |
| Cryoconite | 0.96 | Generic value for organic matter [71] |
| Crevasses | 1 |
| Imagery | GCP | GCP | GCP | GVP | GVP | GVP |
|---|---|---|---|---|---|---|
| RMSE XY (cm) | RMSE Z (cm) | Total RMSE (cm) | RMSE XY (cm) | RMSE Z (cm) | Total RMSE (cm) | |
| RGB | 6.245 | 6.236 | 8.826 | 13.251 | 10.803 | 17.097 |
| MAIA S2 | 0.603 | 0.039 | 0.604 | 1.716 | 3.001 | 3.456 |
| TIR | 14.6 | 26.4 | 30.2 | - | - | - |
| ME|SDX (cm) | ME|SDY (cm) | ME|SDZ (cm) | ME|SDX (cm) | ME|SDY (cm) | ME|SDZ (cm) | |
| RGB | 4.437|1.971 | 3.249|2.209 | 5.473|2.989 | 7.766|6.847 | 7.407|3.681 | 10.073|3.906 |
| MAIA S2 | 0.188|0.105 | 0.446|0.277 | 0.028|0.027 | 1.416|0.899 | 0.247|0.260 | 2.808|1.058 |
| TIR | 4.6|2.7 | 14.4|7.0 | 28.0|12.0 | - | - | - |
| B1 (443) | B2 (490) | B3 (560) | B4 (665) | B5 (705) | B6 (740) | B7 (783) | B8 (842) | B9 (865) | |
|---|---|---|---|---|---|---|---|---|---|
| Slope | 3.08 | 3.16 | 2.91 | 2.59 | 2.86 | 2.57 | 2.33 | 2.67 | 2.90 |
| R2 | 0.98 | 0.98 | 0.98 | 0.98 | 0.98 | 0.98 | 0.97 | 0.97 | 0.97 |
| RMSE | 0.025 | 0.027 | 0.027 | 0.030 | 0.030 | 0.032 | 0.037 | 0.040 | 0.045 |
| MAD | 0.019 | 0.021 | 0.022 | 0.026 | 0.025 | 0.028 | 0.032 | 0.035 | 0.040 |
| RE (%) | 12.26 | 12.73 | 13.48 | 15.84 | 15.97 | 18.33 | 22.19 | 25.10 | 28.12 |
| B1 (443) | B2 (490) | B3 (560) | B4 (665) | B5 (705) | B6 (740) | B7 (783) | B8 (842) | B9 (865) | |
|---|---|---|---|---|---|---|---|---|---|
| R2 | 0.914 | 0.909 | 0.907 | 0.884 | 0.862 | 0.827 | 0.767 | 0.722 | 0.699 |
| RMSE | 0.027 | 0.029 | 0.030 | 0.033 | 0.033 | 0.035 | 0.041 | 0.044 | 0.047 |
| MAD | 0.021 | 0.023 | 0.024 | 0.029 | 0.029 | 0.031 | 0.036 | 0.039 | 0.041 |
| RE (%) | 13.878 | 13.832 | 14.338 | 17.746 | 18.141 | 20.613 | 25.278 | 28.497 | 30.506 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rossini, M.; Garzonio, R.; Panigada, C.; Tagliabue, G.; Bramati, G.; Vezzoli, G.; Cogliati, S.; Colombo, R.; Di Mauro, B. Mapping Surface Features of an Alpine Glacier through Multispectral and Thermal Drone Surveys. Remote Sens. 2023, 15, 3429. https://doi.org/10.3390/rs15133429
Rossini M, Garzonio R, Panigada C, Tagliabue G, Bramati G, Vezzoli G, Cogliati S, Colombo R, Di Mauro B. Mapping Surface Features of an Alpine Glacier through Multispectral and Thermal Drone Surveys. Remote Sensing. 2023; 15(13):3429. https://doi.org/10.3390/rs15133429
Chicago/Turabian StyleRossini, Micol, Roberto Garzonio, Cinzia Panigada, Giulia Tagliabue, Gabriele Bramati, Giovanni Vezzoli, Sergio Cogliati, Roberto Colombo, and Biagio Di Mauro. 2023. "Mapping Surface Features of an Alpine Glacier through Multispectral and Thermal Drone Surveys" Remote Sensing 15, no. 13: 3429. https://doi.org/10.3390/rs15133429
APA StyleRossini, M., Garzonio, R., Panigada, C., Tagliabue, G., Bramati, G., Vezzoli, G., Cogliati, S., Colombo, R., & Di Mauro, B. (2023). Mapping Surface Features of an Alpine Glacier through Multispectral and Thermal Drone Surveys. Remote Sensing, 15(13), 3429. https://doi.org/10.3390/rs15133429