
A Transformer Model for Coastline Prediction in Weitou Bay, China


Abstract
:1. Introduction
2. Materials
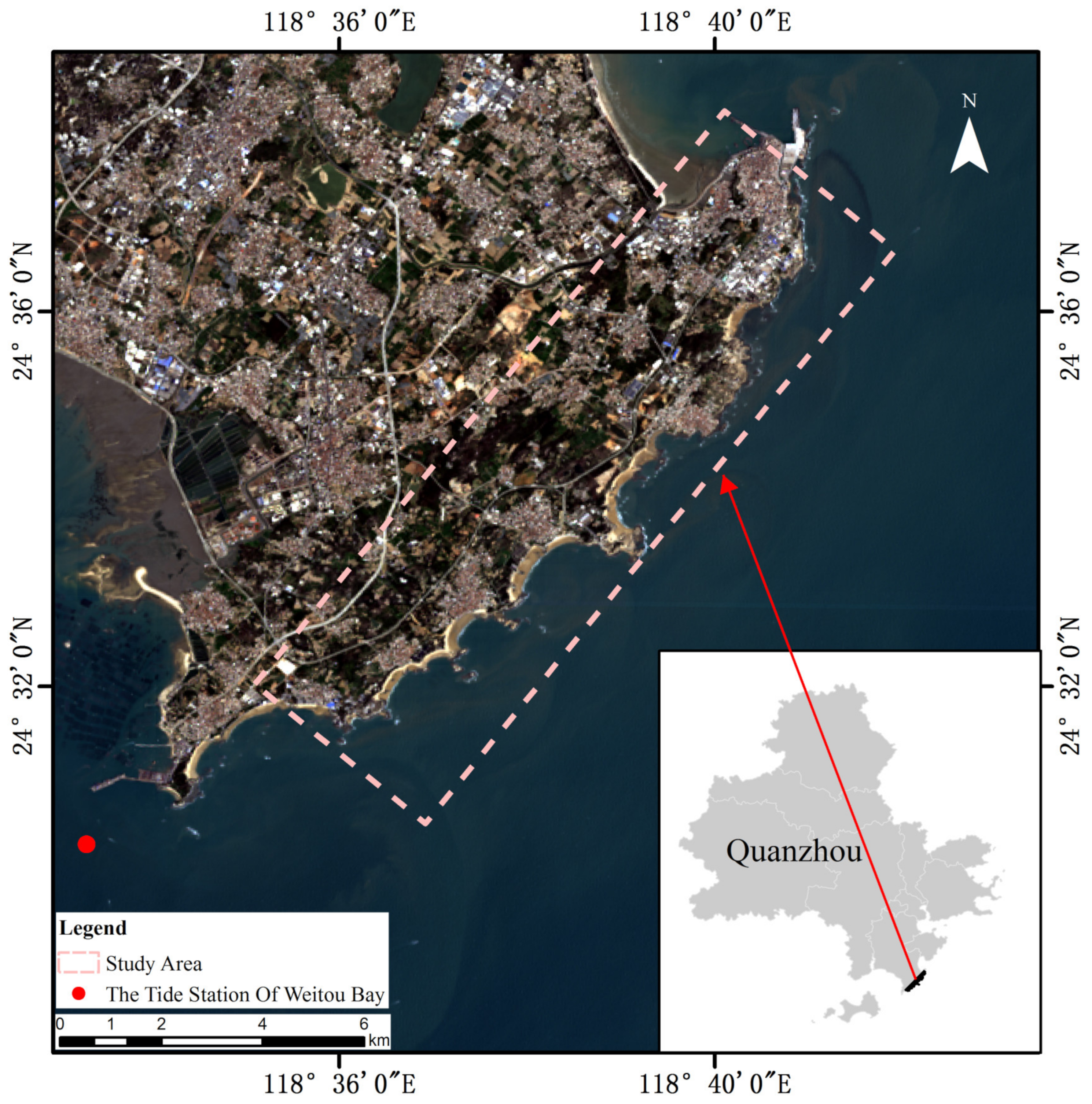
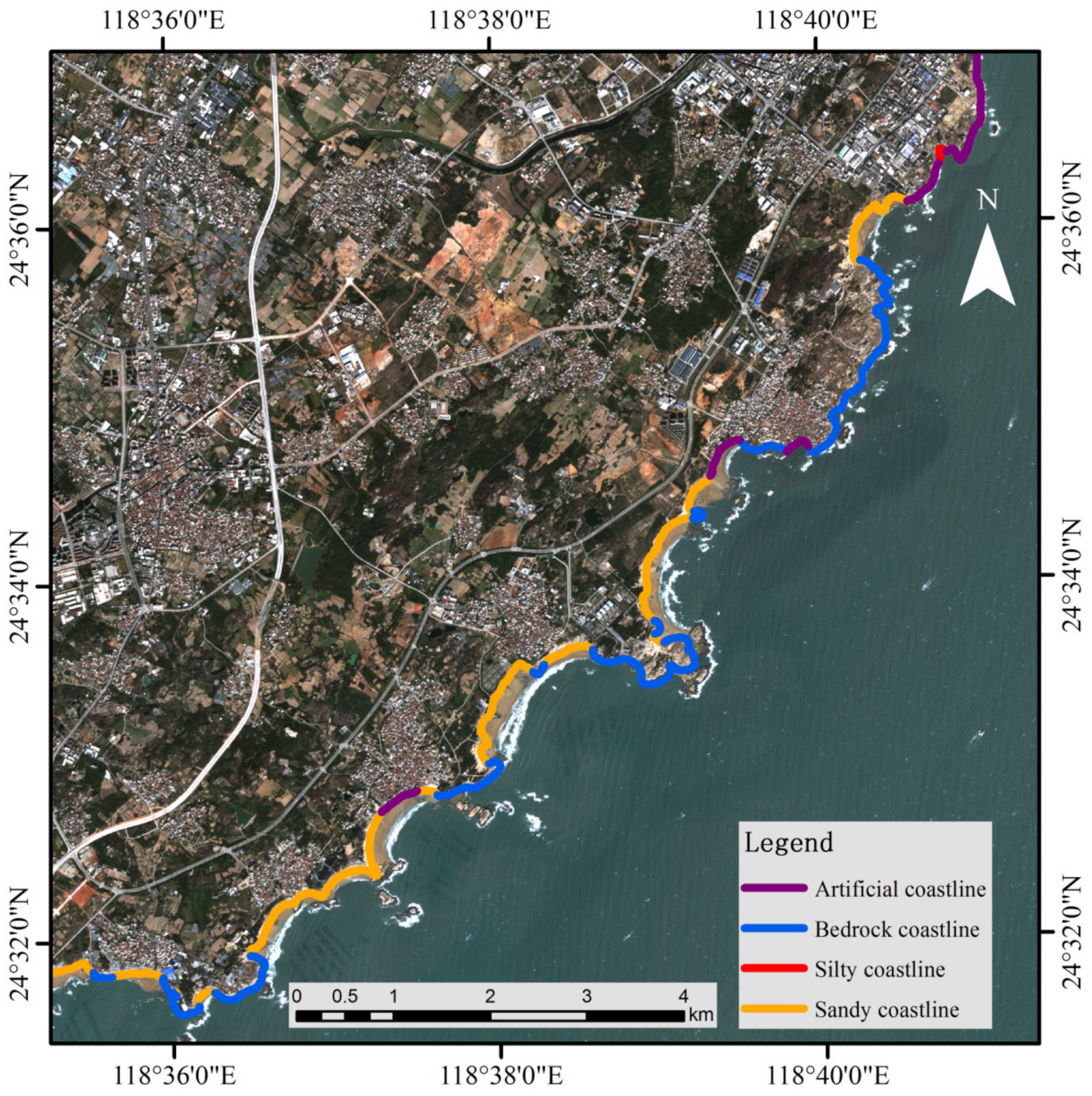
2.1. Study Areas
2.2. Satellite Image Download
2.3. Data Preprocessing
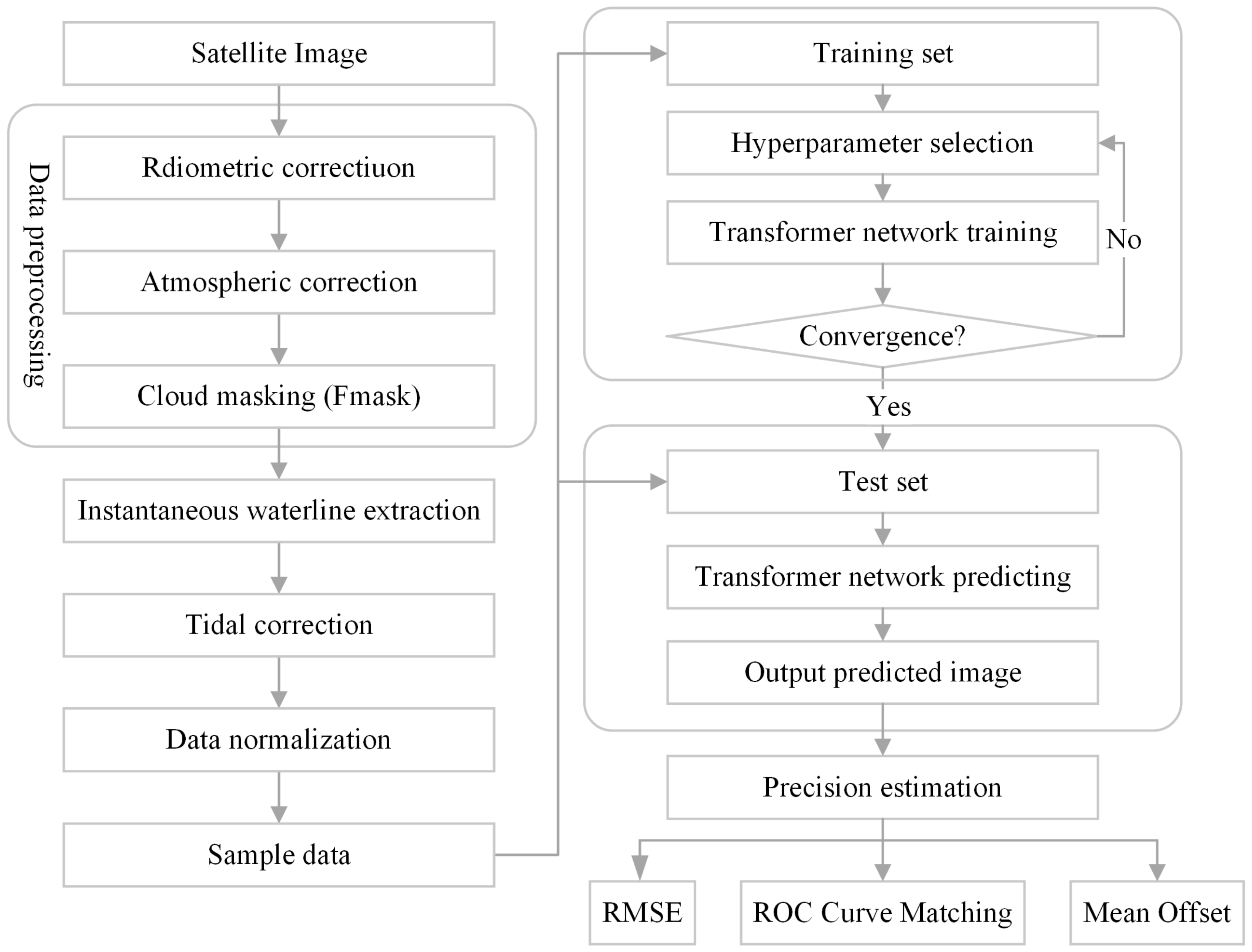
3. Method
3.1. Instantaneous Waterline Extraction
3.2. Tidal Correction
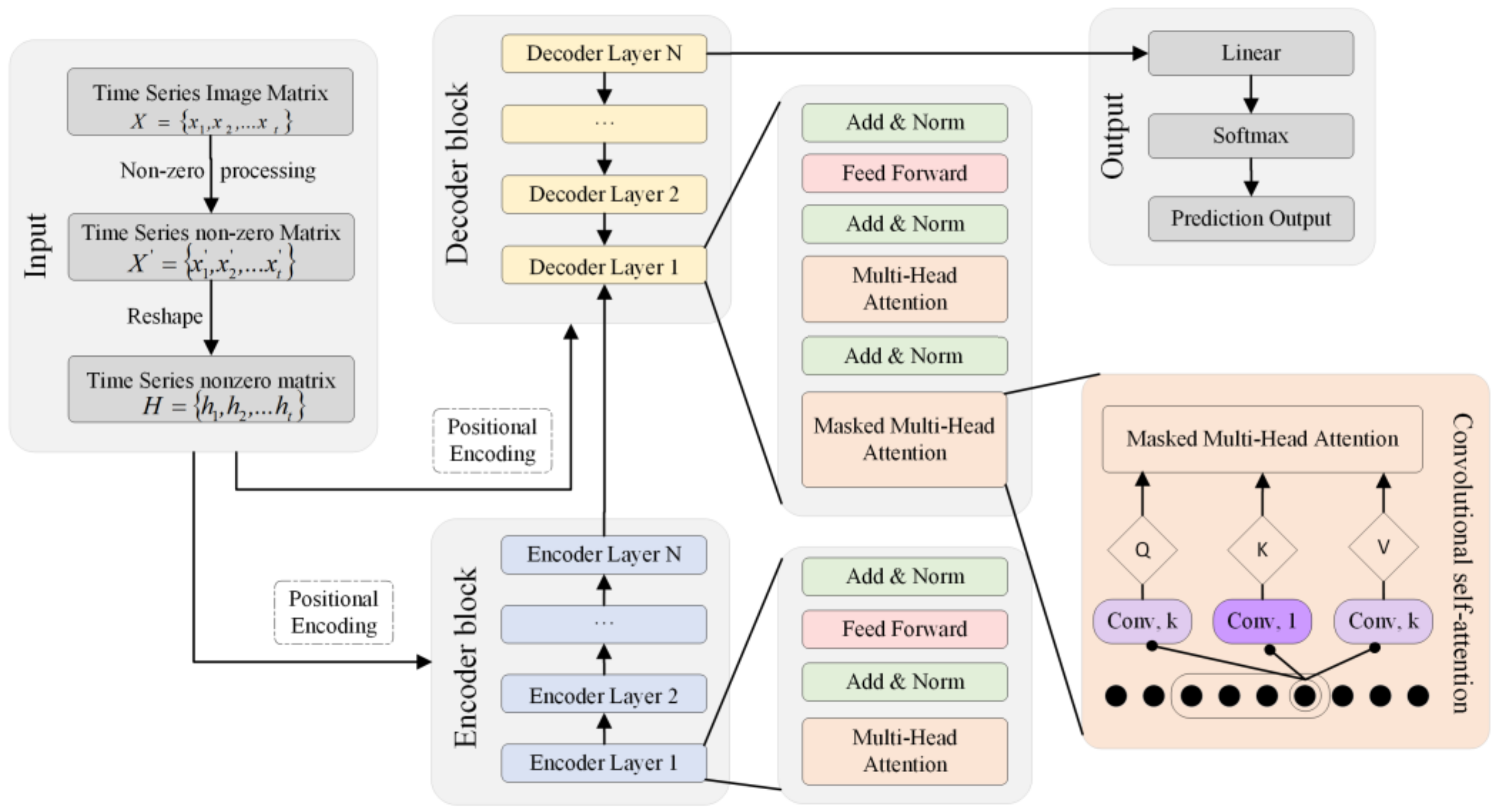
3.3. Transformer Model
3.4. Implementation Details
3.4.1. Redefined Image Format
3.4.2. Training Strategies of SVR, LSTM, and Transformer Methods
3.5. Precision Validation
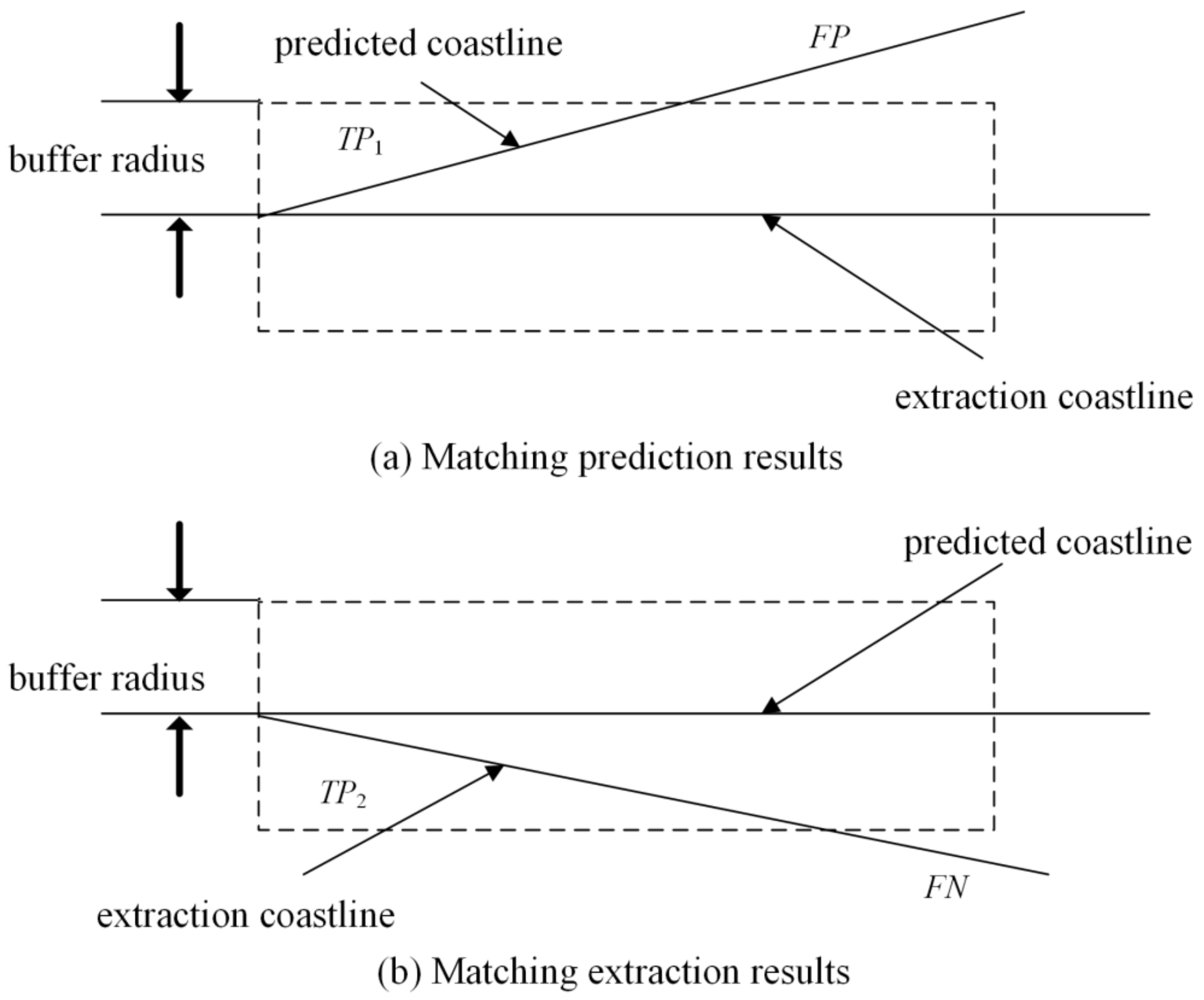
3.5.1. ROC Curve-Matching Principle
3.5.2. Mean Offset and Root Mean Square Error
4. Results
4.1. Coastline Extraction
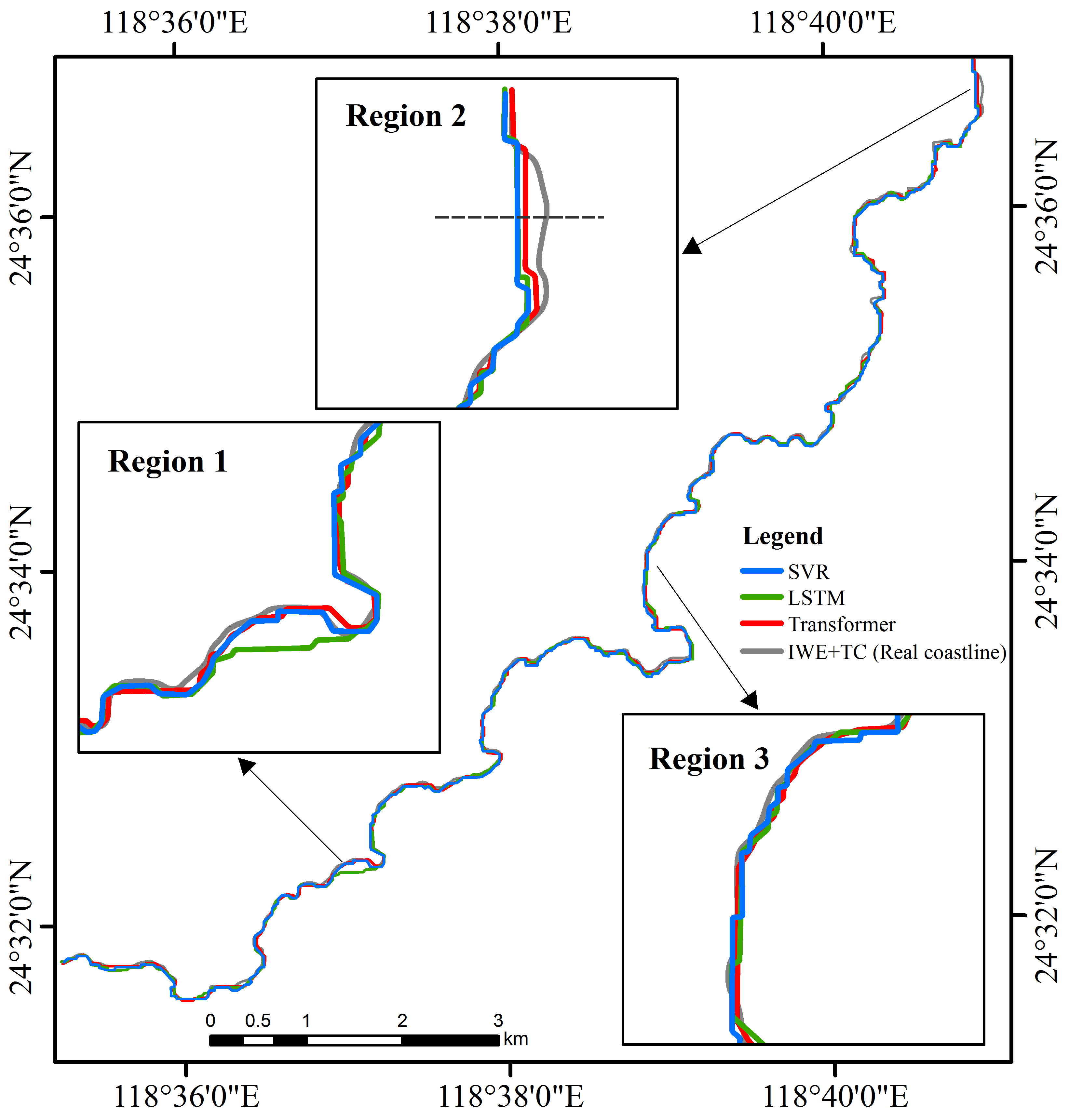
4.2. Predicted Coastline
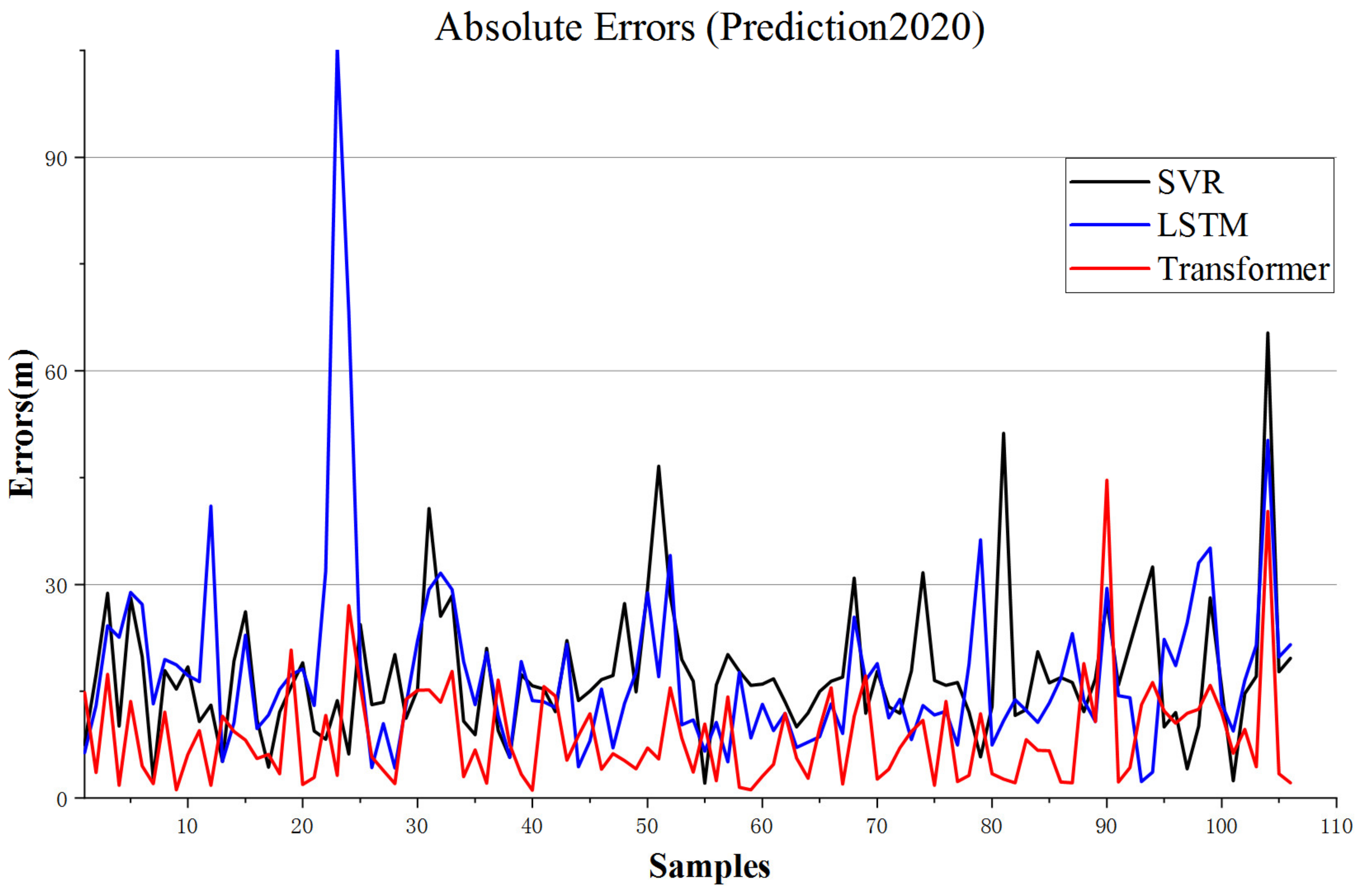
4.3. Accuracy Evaluation
5. Discussions
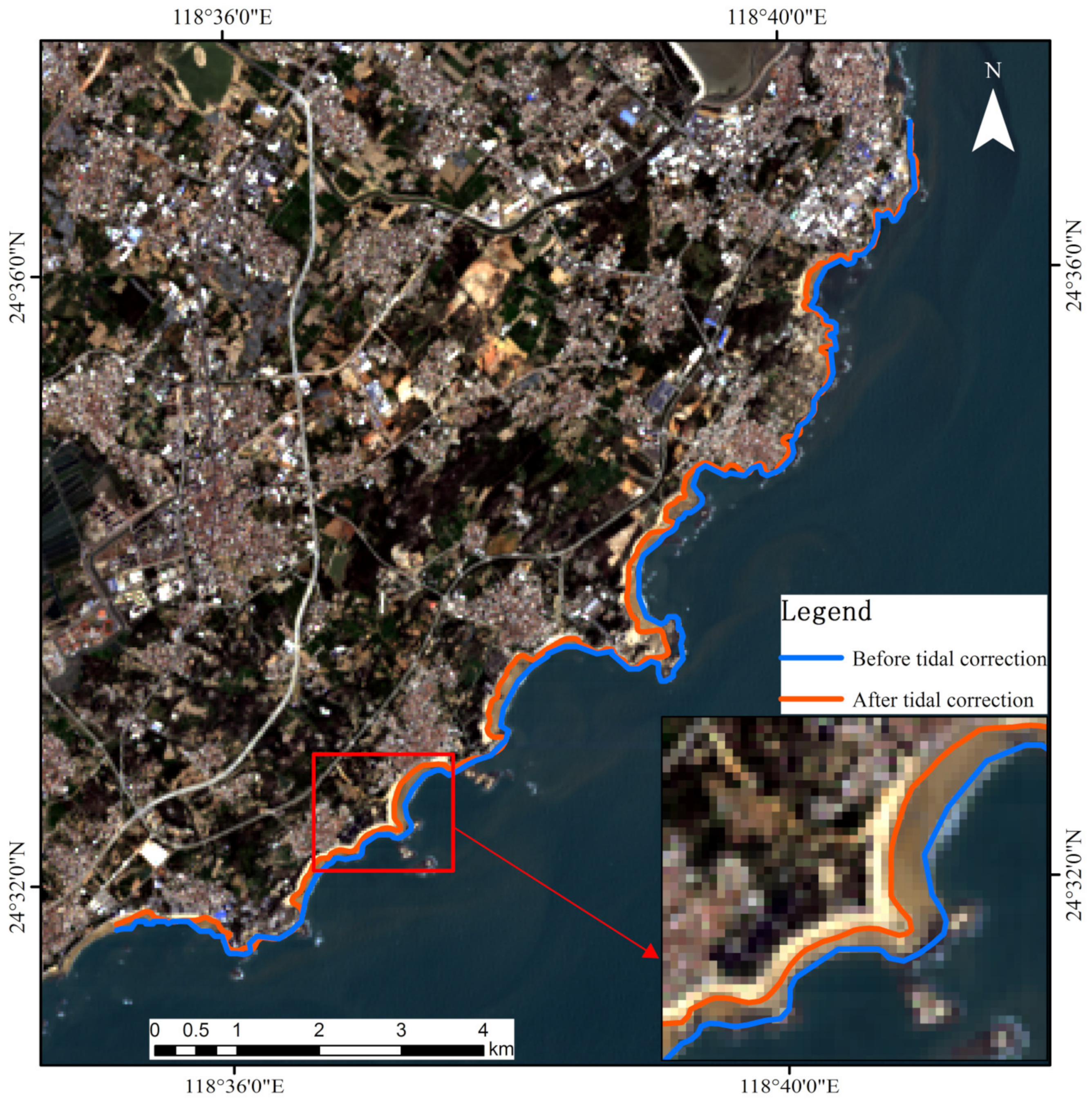
5.1. The Effect of Tidal Correction
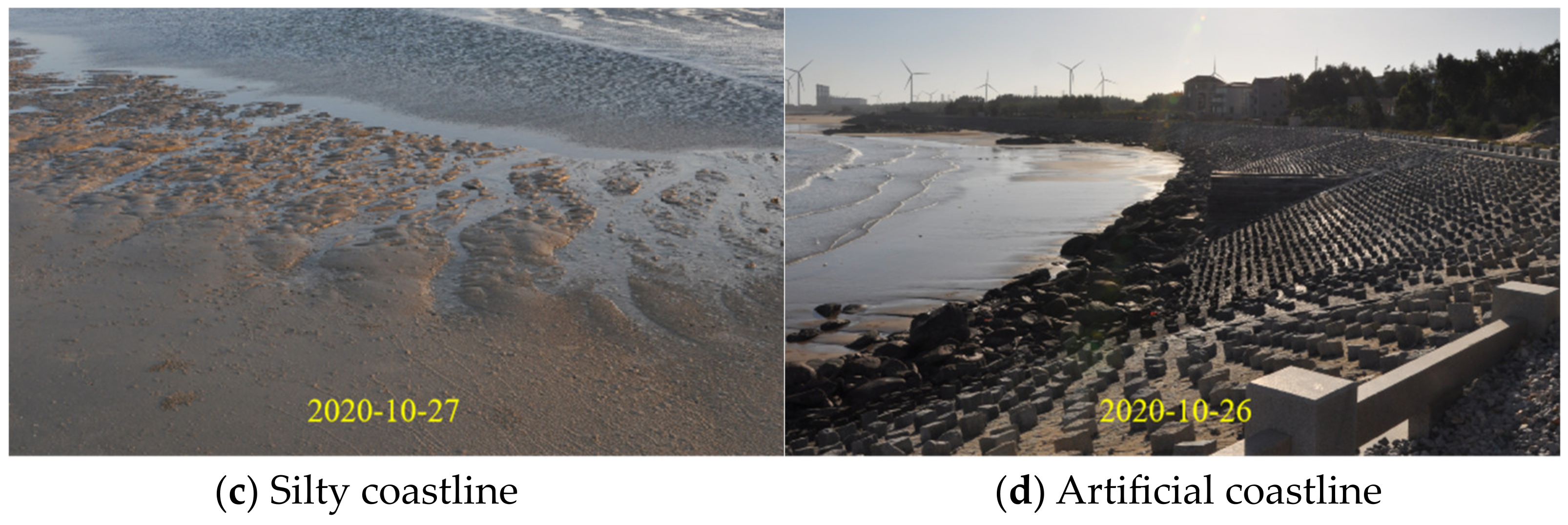
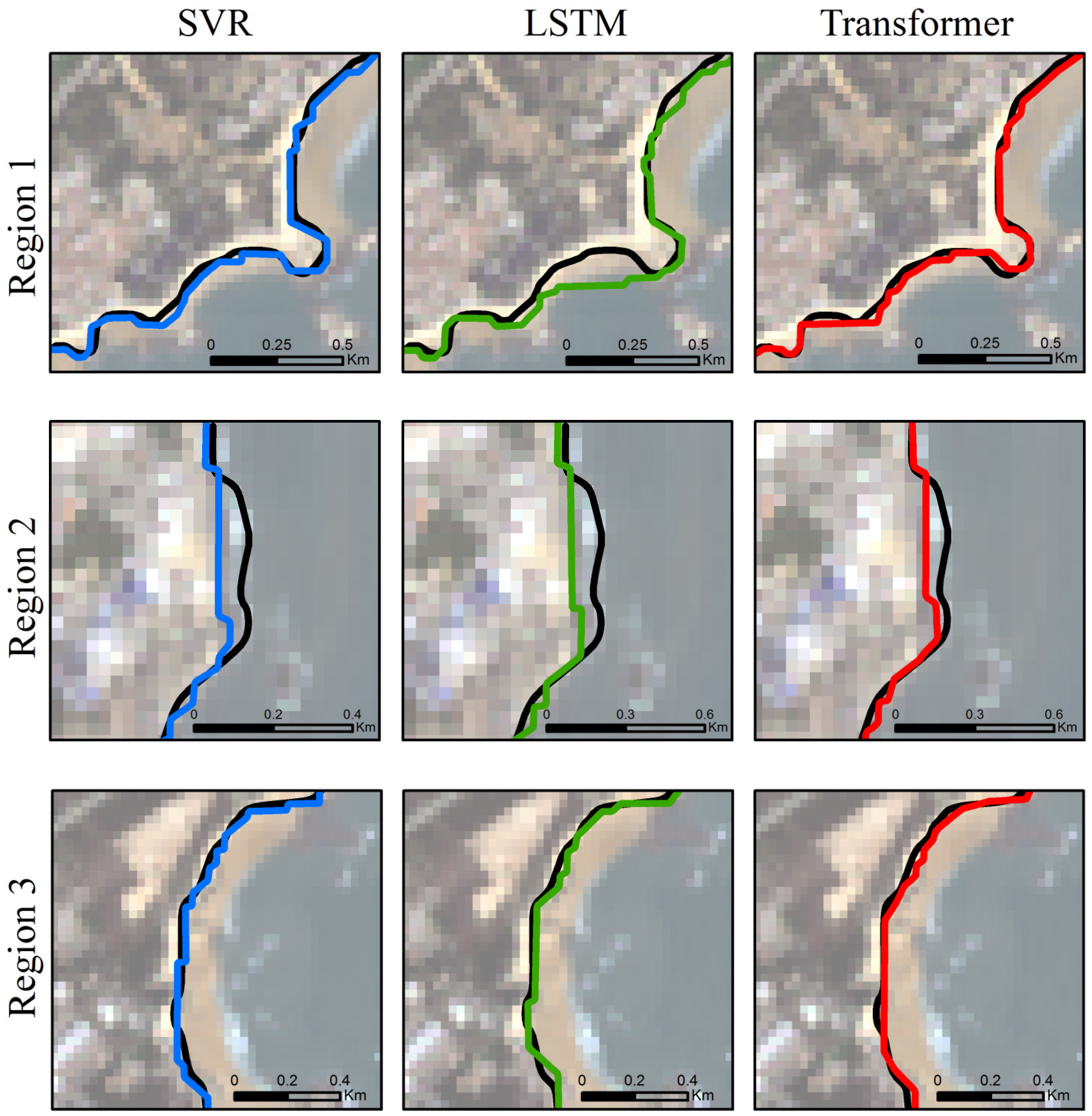
5.2. Effects of Coastline Types on Prediction
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Boak, E.H.; Turner, I.L. Shoreline definition and detection: A review. J. Coast. Res. 2005, 21, 688–703. [Google Scholar] [CrossRef]
- Cui, B.-L.; Li, X.-Y. Coastline change of the Yellow River estuary and its response to the sediment and runoff (1976–2005). Geomorphology 2011, 127, 32–40. [Google Scholar] [CrossRef]
- Genz, A.S.; Fletcher, C.H.; Dunn, R.A.; Frazer, L.N.; Rooney, J.J. The predictive accuracy of shoreline change rate methods and alongshore beach variation on Maui, Hawaii. J. Coast. Res. 2007, 23, 87–105. [Google Scholar] [CrossRef]
- Scott, D.B. Coastal changes, rapid. In Encyclopedia of Coastal Sciences; Springer: Cham, The Netherlands, 2005; pp. 253–255. [Google Scholar]
- Kumar, A.; Jayappa, K. Long and short-term shoreline changes along Mangalore coast, India. Int. J. Environ. Res. 2009, 3, 177–188. [Google Scholar] [CrossRef]
- Larson, M.; Kraus, N.C. Prediction of cross-shore sediment transport at different spatial and temporal scales. Mar. Geol. 1995, 126, 111–127. [Google Scholar] [CrossRef]
- Miller, J.K.; Dean, R.G. A simple new shoreline change model. Coast. Eng. 2004, 51, 531–556. [Google Scholar] [CrossRef]
- Li, Z.; Chen, Z. Progress in the Studies on Shoreline Change of Sandy Coast. Mar. Sci. Bull. 2003, 22, 77–86. [Google Scholar]
- Chen, X.; Zong, Y. Coastal erosion along the Changjiang deltaic shoreline, China: History and prospective. Estuar. Coast. Shelf Sci. 1998, 46, 733–742. [Google Scholar] [CrossRef]
- Davidson, M.A.; Lewis, R.P.; Turner, I.L. Forecasting seasonal to multi-year shoreline change. Coast. Eng. 2010, 57, 620–629. [Google Scholar] [CrossRef]
- Hughes, S.A. Physical Models and Laboratory Techniques in Coastal Engineering; World Scientific: Singapore, 1993. [Google Scholar]
- Ekphisutsuntorn, P.; Wongwises, P.; Chinnarasri, C.; Humphries, U.; Vongvisessomjai, S. Numerical modeling of erosion for muddy coast at Bangkhuntien shoreline, Thailand. Int. J. Environ. Sci. Eng. 2010, 2, 230–240. [Google Scholar]
- Nguyen, X.T.; Tran, M.T.; Tanaka, H.; Nguyen, T.V.; Mitobe, Y.; Duong, C.D. Numerical investigation of the effect of seasonal variations of depth-of-closure on shoreline evolution. Int. J. Sediment Res. 2021, 36, 1–16. [Google Scholar] [CrossRef]
- Thanh, T.M.; Tanaka, H.; Mitobe, Y.; Viet, N.T.; Almar, R. Seasonal variation of morphology and sediment movement on nha trang coast, vietnam. J. Coast. Res. 2018, 81, 22–31. [Google Scholar]
- Zeinali, S.; Dehghani, M.; Talebbeydokhti, N. Artificial neural network for the prediction of shoreline changes in Narrabeen, Australia. Appl. Ocean. Res. 2021, 107, 102362. [Google Scholar] [CrossRef]
- Adamo, F.; De Capua, C.; Filianoti, P.; Lanzolla, A.M.L.; Morello, R. A coastal erosion model to predict shoreline changes. Measurement 2014, 47, 734–740. [Google Scholar] [CrossRef]
- Douglas, B.C.; Crowell, M. Long-term shoreline position prediction and error propagation. J. Coast. Res. 2000, 16, 145–152. [Google Scholar]
- Ghorai, D.; Bhunia, G.S. Automatic shoreline detection and its forecast: A case study on Dr. Abdul Kalam Island in the section of Bay of Bengal. Geocarto Int. 2022, 37, 2273–2292. [Google Scholar] [CrossRef]
- Ciritci, D.; Türk, T. Assessment of the Kalman filter-based future shoreline prediction method. Int. J. Environ. Sci. Technol. 2020, 8, 3801–3816. [Google Scholar] [CrossRef]
- San, B.T.; Ulusar, U.D. An approach for prediction of shoreline with spatial uncertainty mapping (SLiP-SUM). Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 546–554. [Google Scholar] [CrossRef]
- Addo, K.A.; Walkden, M.; Mills, J.T. Detection, measurement and prediction of shoreline recession in Accra, Ghana. ISPRS J. Photogramm. Remote Sens. 2008, 63, 543–558. [Google Scholar] [CrossRef]
- Carleo, G.; Cirac, I.; Cranmer, K.; Daudet, L.; Schuld, M.; Tishby, N.; Vogt-Maranto, L.; Zdeborová, L. Machine learning and the physical sciences. Rev. Mod. Phys. 2019, 91, 045002. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Tuia, D.; Verrelst, J.; Alonso, L.; Pérez-Cruz, F.; Camps-Valls, G. Multioutput support vector regression for remote sensing biophysical parameter estimation. IEEE Geosci. Remote Sens. Lett. 2011, 8, 804–808. [Google Scholar] [CrossRef]
- Parbat, D.; Chakraborty, M. A python based support vector regression model for prediction of COVID19 cases in India. Chaos Solitons Fractals 2020, 138, 109942. [Google Scholar] [CrossRef] [PubMed]
- Balabin, R.M.; Lomakina, E.I. Support vector machine regression (SVR/LS-SVM)—An alternative to neural networks (ANN) for analytical chemistry? Comparison of nonlinear methods on near infrared (NIR) spectroscopy data. Analyst 2011, 136, 1703–1712. [Google Scholar] [CrossRef] [PubMed]
- Ramedani, Z.; Omid, M.; Keyhani, A.; Khoshnevisan, B.; Saboohi, H. A comparative study between fuzzy linear regression and support vector regression for global solar radiation prediction in Iran. Sol. Energy 2014, 109, 135–143. [Google Scholar] [CrossRef]
- Goncalves, R.M.; Awange, J.L.; Krueger, C.P.; Heck, B.; Dos Santos Coelho, L. A comparison between three short-term shoreline prediction models. Ocean Coast. Manag. 2012, 69, 102–110. [Google Scholar] [CrossRef]
- Chang, F.-J.; Lai, H.-C. Adaptive neuro-fuzzy inference system for the prediction of monthly shoreline changes in northeastern Taiwan. Ocean Eng. 2014, 84, 145–156. [Google Scholar] [CrossRef]
- Pazou, M.G.A.; Agbodoyetin, A.; Akowanou, C. Shoreline evolution prediction using satellite images and time series analysis techniques: Case of Akpakpa shoreline in Benin Republic. In Proceedings of the 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Maldives, 16–18 November 2022; IEEE: New York, NY, USA, 2022. [Google Scholar]
- Yin, C.; Anh, D.T.; Mai, S.T.; Le, A.; Nguyen, V.-H.; Nguyen, V.-C.; Tinh, N.X.; Tanaka, H.; Viet, N.T.; Nguyen, L.D. Advanced machine learning techniques for predicting nha trang shorelines. IEEE Access 2021, 9, 98132–98149. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 6000–6010. [Google Scholar]
- Mohammadi Farsani, R.; Pazouki, E. A transformer self-attention model for time series forecasting. J. Electr. Comput. Eng. Innov. JECEI 2020, 9, 1–10. [Google Scholar]
- Wu, N.; Green, B.; Ben, X.; O’banion, S. Deep transformer models for time series forecasting: The influenza prevalence case. arXiv 2020, arXiv:200108317. [Google Scholar]
- Cai, L.; Janowicz, K.; Mai, G.; Yan, B.; Zhu, R. Traffic transformer: Capturing the continuity and periodicity of time series for traffic forecasting. Trans. GIS 2020, 24, 736–755. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.; Cheng, S.; Li, Y. SwinSUNet: Pure transformer network for remote sensing image change detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Chen, H.; Qi, Z.; Shi, Z. Remote sensing image change detection with transformers. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–14. [Google Scholar] [CrossRef]
- Yang, D.; Qi, S.; Zhang, Y.; Xing, X.; Liu, H.; Qu, C.; Liu, J.; Li, F. Levels, sources and potential risks of polycyclic aromatic hydrocarbons (PAHs) in multimedia environment along the Jinjiang River mainstream to Quanzhou Bay, China. Mar. Pollut. Bull. 2013, 76, 298–306. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.Z.; Shi, F.; Hong, H.S.; Shang, S.P.; Kirby, J.T. Tide-surge interaction intensified by the Taiwan Strait. J. Geophys. Res. Ocean. 2010, 115. [Google Scholar] [CrossRef]
- Zhu, J.; Hu, J.; Zhang, W.; Zeng, G.; Chen, D.; Chen, J.; Shang, S. Numerical study on tides in the Taiwan Strait and its adjacent areas. Mar. Sci. Bull. 2009, 11, 23–36. [Google Scholar]
- Wu, T.; Hou, X.; Xu, X. Spatio-temporal characteristics of the mainland coastline utilization degree over the last 70 years in China. Ocean Coast. Manag. 2014, 98, 150–157. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, L.; Lu, S.-Y.; Tan, X.-Y.; Chen, K.-L.; Zhao, S.-Q.; Huang, R.-H. A new model for evaluating sustainable utilization of coastline integrating economic output and ecological impact: A case study of coastal areas in Beibu Gulf, China. J. Clean. Prod. 2020, 271, 122423. [Google Scholar] [CrossRef]
- Gong, X.; Qi, S.; Wang, Y.; Julia, E.; Lv, C. Historical contamination and sources of organochlorine pesticides in sediment cores from Quanzhou Bay, Southeast China. Mar. Pollut. Bull. 2007, 54, 1434–1440. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, Z. Research progress on methods of automatic coastline extraction based on remote sensing images. J. Remote Sens. 2019, 23, 582–602. [Google Scholar] [CrossRef]
- Li, R.; Wang, Q.; Cheong, K.C. Quanzhou: Reclaiming a glorious past. Cities 2016, 50, 168–179. [Google Scholar] [CrossRef]
- Gao, T.; Na, S.; Dang, X.; Zhang, Y. Study of the Competitiveness of Quanzhou Port on the Belt and Road in China Based on a Fuzzy-AHP and ELECTRE III Model. Sustainability 2018, 10, 1253. [Google Scholar] [CrossRef]
- Zheng, X. Countermeasures for development of Fujian cultural tourism based on SWOT analysis. In Proceedings of the 3rd International Conference on Culture, Education and Economic Development of Modern Society (ICCESE 2019), Moscow, Russia, 1 March 2019; Atlantis Press: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Fan, L.; Cao, M.; Li, X. Analysis of the Temporal and Spatial Distribution Characteristics and Influencing Factors of Religious Sites on the Maritime Silk Road: A Case Study of Quanzhou. J. Tour. Manag. Res. 2022, 9, 110–124. [Google Scholar] [CrossRef]
- Xiao, X.; Li, Y.; Shu, F.; Wang, L.; He, J.; Zou, X.; Chi, W.; Lin, Y.; Zheng, B. Coupling relationship of human activity and geographical environment in stage-specific development of urban coastal zone: A case study of Quanzhou Bay, China (1954–2020). Front. Mar. Sci. 2022, 8, 781910. [Google Scholar] [CrossRef]
- Vos, K.; Harley, M.D.; Splinter, K.D.; Simmons, J.A.; Turner, I.L. Sub-annual to multi-decadal shoreline variability from publicly available satellite imagery. Coast. Eng. 2019, 150, 160–174. [Google Scholar] [CrossRef]
- Holben, B.N. Characteristics of maximum-value composite images from temporal AVHRR data. Int. J. Remote Sens. 1986, 7, 1417–1434. [Google Scholar] [CrossRef]
- Cooley, T.; Anderson, G.P.; Felde, G.W.; Hoke, M.L.; Ratkowski, A.J.; Chetwynd, J.H.; Gardner, J.A.; Adler-Golden, S.M.; Matthew, M.W.; Berk, A.; et al. FLAASH, a MODTRAN4-based atmospheric correction algorithm, its application and validation. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2003, Toronto, ON, Canada, 24–28 June 2002. [Google Scholar]
- Berk, A.; Anderson, G.P.; Bernstein, L.S.; Acharya, P.K.; Dothe, H.; Matthew, M.W.; Adler-Golden, S.M.; Chetwynd, J.H., Jr.; Richtsmeier, S.C.; Pukall, B.; et al. MODTRAN4 radiative transfer modeling for atmospheric correction. In Proceedings of the 1999 Optical Spectroscopic Techniques and Instrumentation for Atmospheric and Space Research III, Denver, CO, USA, 19–21 July 1999; Society of Photo-Optical Instrumentation Engineers: Washington, DC, USA, 1999. [Google Scholar]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4-7, 8, and Sentinel 2 images. Remote Sens Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Kass, M.; Witkin, A.; Terzopoulos, D. Snakes: Active contour models. Int. J. Comput. Vis. 1988, 1, 321–331. [Google Scholar] [CrossRef]
- Park, W.; Lee, Y.-K.; Shin, J.-S.; Won, J.-S. A tidal correction model for near-infrared (NIR) reflectance over tidal flats. Remote Sens. Lett. 2013, 4, 833–842. [Google Scholar] [CrossRef]
- Li, C.; Xu, C.; Gui, C.; Fox, M.D. Distance regularized level set evolution and its application to image segmentation. IEEE Trans. Image Process. 2010, 19, 3243–3254. [Google Scholar] [CrossRef] [PubMed]
- Gilboa, G.; Sochen, N.; Zeevi, Y.Y. Forward-and-backward diffusion processes for adaptive image enhancement and denoising. IEEE Trans. Image Process. 2002, 11, 689–703. [Google Scholar] [CrossRef]
- Toure, S.; Diop, O.; Kpalma, K.; Maiga, A. Coastline detection using fusion of over segmentation and distance regularization level set evolution. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 513–518. [Google Scholar] [CrossRef]
- Ahmed, S.; Nielsen, I.E.; Tripathi, A.; Siddiqui, S.; Rasool, G.; Ramachandran, R.P. Transformers in time-series analysis: A tutorial. arXiv 2022, arXiv:220501138. [Google Scholar] [CrossRef]
- Li, S.; Jin, X.; Xuan, Y.; Zhou, X.; Chen, W.; Wang, Y.-X.; Yan, X. Enhancing the locality and breaking the memory bottleneck of transformer on time series forecasting; Advances in neural information processing systems. arXiv 2019, arXiv:1907.00235. [Google Scholar]
- Balogun, A.-L.; Adebisi, N. Sea level prediction using ARIMA, SVR and LSTM neural network: Assessing the impact of ensemble Ocean-Atmospheric processes on models’ accuracy. Geomat. Nat. Hazards Risk 2021, 12, 653–674. [Google Scholar] [CrossRef]
- Xuejin, Q.; Qing, W.; Chao, Z.; Xin, W.; Hongyan, W.; Guoyun, D.; Xueyan, L. Study on automatic extraction of coastline in the Yellow River Delta based on multi-spectral data. Haiyang Xuebao 2016, 38, 59–71. [Google Scholar]
- Dellepiane, S.; De Laurentiis, R.; Giordano, F. Coastline extraction from SAR images and a method for the evaluation of the coastline precision. Pattern Recognit. Lett. 2004, 13, 1461–1470. [Google Scholar] [CrossRef]
- Chen, Q.; Huang, F.; Cai, A. Spatiotemporal trends, sources and ecological risks of heavy metals in the surface sediments of weitou bay, China. Int. J. Environ. Res. Public Health 2021, 18, 9562. [Google Scholar] [CrossRef]
- Fletcher, C.H.; Mullane, R.A.; Richmond, B.M. Beach loss along armored shorelines on Oahu, Hawaiian Islands. J. Coast. Res. 1997, 13, 209–215. [Google Scholar]
- Fletcher, C.; Rooney, J.; Barbee, M.; Lim, S.-C.; Richmond, B. Mapping shoreline change using digital orthophotogrammetry on Maui, Hawaii. J. Coast. Res. 2003, 106–124. [Google Scholar]
- Oyegun, C.; Lawal, O. Geographic information systems-based expert system modelling for shoreline sensitivity to oil spill disaster in Rivers State, Nigeria. Jàmbá J. Disaster Risk Stud. 2017, 9, 429. [Google Scholar]
- Kurt, S.; Karaburun, A.; Demirci, A. Coastline changes in Istanbul between 1987 and 2007. Sci. Res. Essays 2010, 5, 3009–3017. [Google Scholar]
- Chuai, X.; Huang, X.; Wu, C.; Li, J.; Lu, Q.; Qi, X.; Zhang, M.; Zuo, T.; Lu, J. Land use and ecosystems services value changes and ecological land management in coastal Jiangsu, China. Habitat Int. 2016, 57, 164–174. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, H.; Qiu, Z.; Fan, J. Detecting coastline change from satellite images based on beach slope estimation in a tidal flat. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 165–176. [Google Scholar] [CrossRef]
- Sui, L.; Wang, J.; Yang, X.; Wang, Z. Spatial-temporal characteristics of coastline changes in Indonesia from 1990 to 2018. Sustainability 2020, 12, 3242. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Time of Images (Time/Date) | Satellite | Sensor | High Tide/Low Tide | Tidal Height (cm) |
|---|---|---|---|---|---|
| 1 | 10:25:22/29 March 2010 | Landsat 7 | ETM+ | High tide | 497 |
| 2 | 10:23:23/13 September 2010 | Landsat 5 | TM | High tide | 146 |
| 3 | 10:23:08/4, February 2011 | Landsat 5 | TM | High tide | 327 |
| 4 | 10:26:00/16 September 2011 | Landsat 5 | TM | High tide | 327 |
| 5 | 10:27:13/30 January 2012 | Landsat 7 | ETM+ | High tide | 173 |
| 6 | 10:28:14/9 August 2012 | Landsat 7 | ETM+ | Low tide | 182 |
| 7 | 10:32:21/25, March 2013 | Landsat 8 | OLI | High tide | 497 |
| 8 | 10:35:11/4 August 2013 | Landsat 8 | OLI | Low tide | 487 |
| 9 | 10:34:17/27 January 2014 | Landsat 8 | OLI | Low tide | 448 |
| 10 | 10:33:12/7 August 2014 | Landsat 8 | OLI | Low tide | 478 |
| 11 | 10:33:12/14 January 2015 | Landsat 8 | OLI | Low tide | 172 |
| 12 | 10:33:04/11 September 2015 | Landsat 8 | OLI | High tide | 532 |
| 13 | 10:33:03/5 March 2016 | Landsat 8 | OLI | High tide | 428 |
| 14 | 10:33:10/27 July 2016 | Landsat 8 | OLI | Low tide | 251 |
| 15 | 10:33:23/3 January 2017 | Landsat 8 | OLI | High tide | 143 |
| 16 | 10:33:13/15 August 2017 | Landsat 8 | OLI | Low tide | 251 |
| 17 | 10:33:13/22 January 2018 | Landsat 8 | OLI | High tide | 143 |
| 18 | 10:32:44/3 September 2018 | Landsat 8 | OLI | Low tide | 184 |
| 19 | 10:32:58/25 January 2019 | Landsat 8 | OLI | High tide | 197 |
| 20 | 10:33:23/6 September 2019 | Landsat 8 | OLI | Low tide | 118 |
| 21 | 10:33:01/16 March 2020 | Landsat 8 | OLI | Low tide | 177 |
| Model | Correct | Complete | Quality | Mean Offset | RMSE |
|---|---|---|---|---|---|
| SVR | 88.27% | 85.28% | 76.57% | 0.59 pixel | 0.85 pixel |
| LSTM | 94.08% | 91.01% | 86.06% | 0.49 pixel | 0.79 pixel |
| Transformer | 98.80% | 96.40% | 95.24% | 0.32 pixel | 0.57 pixel |
| Model | Correct | Complete | Quality | Mean Offset | RMSE |
|---|---|---|---|---|---|
| Transformer (before tidal correction) | 92.16% | 89.88% | 83.48% | 0.45 pixel | 0.82 pixel |
| Transformer (after tidal correction) | 98.80% | 96.40% | 95.24% | 0.32 pixel | 0.57 pixel |
| Artificial Coastlines | Bedrock Coastlines | Sandy Coastlines | Silt Coastlines | |
|---|---|---|---|---|
| RMSE/m | RMSE/m | RMSE/m | RMSE/m | |
| SVR | 25.2 | 19.7 | 17.2 | 18.6 |
| LSTM | 26.0 | 17.7 | 24.3 | 22.3 |
| Transformer | 14.6 | 8.3 | 12.3 | 12.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Wang, G.; Feng, L.; Wang, Y.; Wang, G.; Liang, S. A Transformer Model for Coastline Prediction in Weitou Bay, China. Remote Sens. 2023, 15, 4771. https://doi.org/10.3390/rs15194771
Yang Z, Wang G, Feng L, Wang Y, Wang G, Liang S. A Transformer Model for Coastline Prediction in Weitou Bay, China. Remote Sensing. 2023; 15(19):4771. https://doi.org/10.3390/rs15194771
Chicago/Turabian StyleYang, Zhihai, Guangjun Wang, Lei Feng, Yuxian Wang, Guowei Wang, and Sihai Liang. 2023. "A Transformer Model for Coastline Prediction in Weitou Bay, China" Remote Sensing 15, no. 19: 4771. https://doi.org/10.3390/rs15194771
APA StyleYang, Z., Wang, G., Feng, L., Wang, Y., Wang, G., & Liang, S. (2023). A Transformer Model for Coastline Prediction in Weitou Bay, China. Remote Sensing, 15(19), 4771. https://doi.org/10.3390/rs15194771