

Tree Species Classification Using Airborne LiDAR Data Based on Individual Tree Segmentation and Shape Fitting

Abstract
:1. Introduction
2. Data and Method
2.1. Data
2.1.1. Study Site
2.1.2. LiDAR Data
2.2. Methods
2.2.1. Procedure Instruction
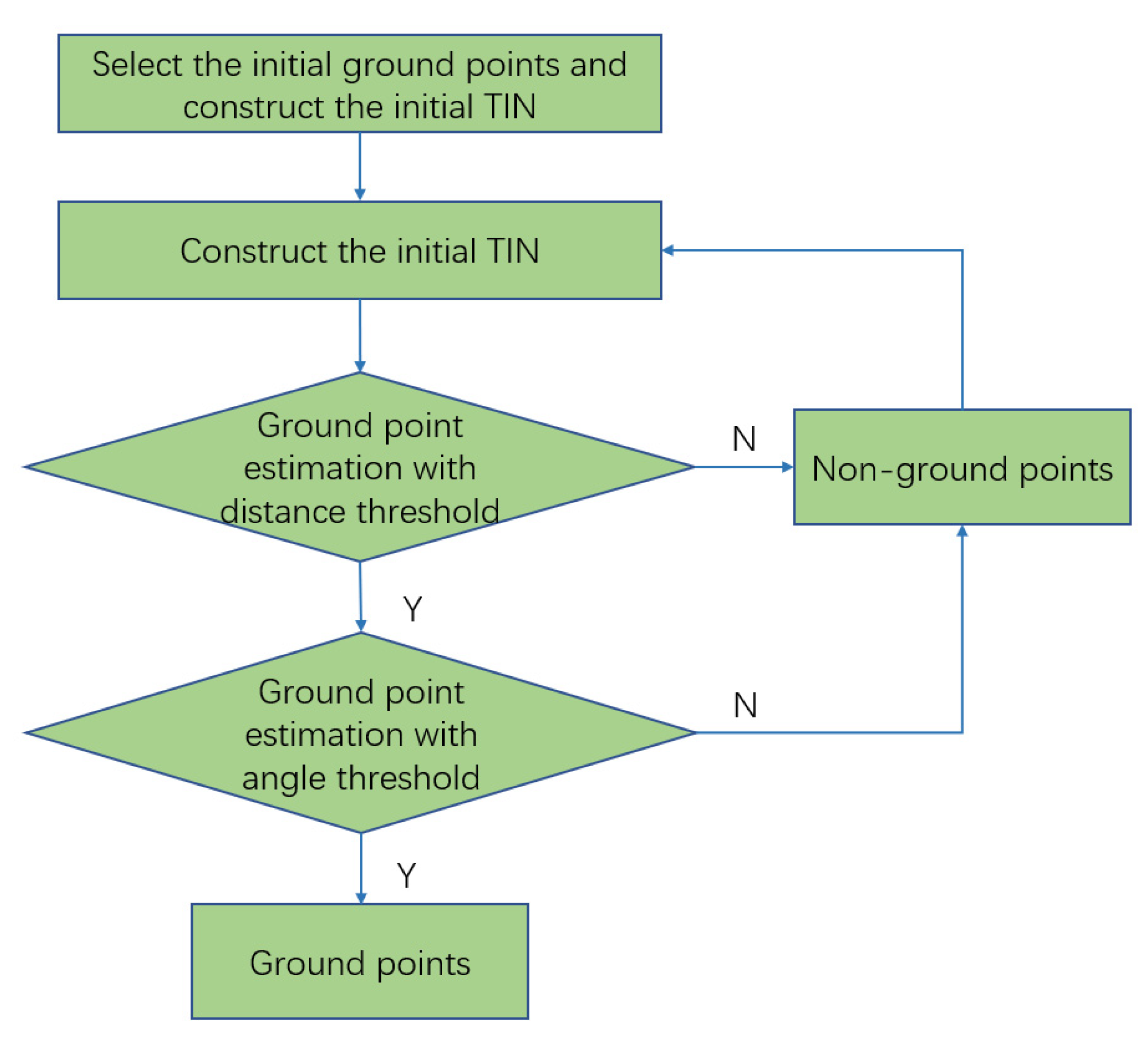
2.2.2. The DEM Generation
- Selection of initial seed points. The ten plots in this study are all forest plots without buildings, so the default value of 20 m is used as the grid length to divide, and the lowest elevation point in each grid is taken as the starting seed point for the algorithm.
- Construction of a triangulation network. Use of the starting seed point to construct a sparse TIN as the initial triangulation.
- Iterative processing. In a certain iteration, judge the points one by one based on the initial triangulation. Take point P as an example: calculate the distance from P to the TIN and the maximum angle between the three vertices of the triangle; if both are within the set threshold ranges, mark P as a ground point and add it to the TIN (otherwise P is classified as a non-ground point). Repeat this process until all points that meet the threshold conditions are classified as ground points. The next iteration obtains new ground points until no more points meet the threshold conditions and the iteration stops.
2.2.3. The Normalized Tree Points (NTP)
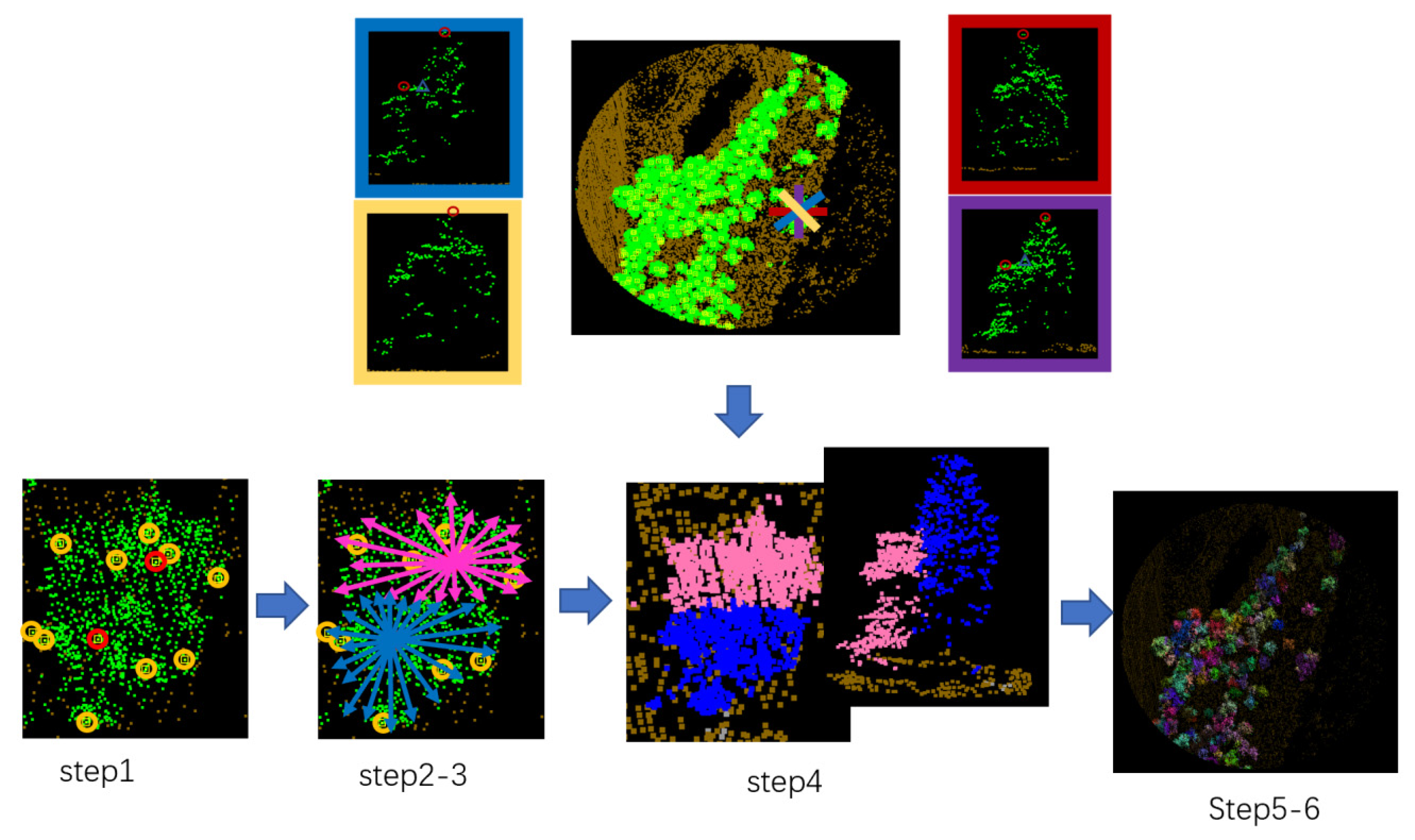
2.2.4. Rough Location of Trees
- GV: the value of the grid cell
- m: he tree point amount in one grid
- ZNTP: the Z value of the tree points
- T: the convolution template
- GV: the Z value of the current gird
- H (GV): judgement value for treetop
- HT: threshold value of H(GV)
- p: certain tree point in current grid
- Zp, Zpt: Z value of the point
- D: threshold distance of two treetops.
2.2.5. Extraction of the Individual Tree
- Pt: treetop point in one section profile
- : the ith point on left side of Pt
- : Z value of Pti , 0 ti, i, t < N, t 0
2.2.6. Tree Species Classification
The Key Points of the Tree Crowns
The Parallel-Line Shape Fitting of the Key Points
- (1)
- From Section 2.2.5, the treetops and the segmented tree crowns can be obtained. And then in the top view, take the tree top point as the center, the crown length of the tree crown as the profile length, and take as the width of the cross-sectional view of the crown, then the profile points of the tree crowns points can be generated, and all the details are shown in Figure 11.
- (2)
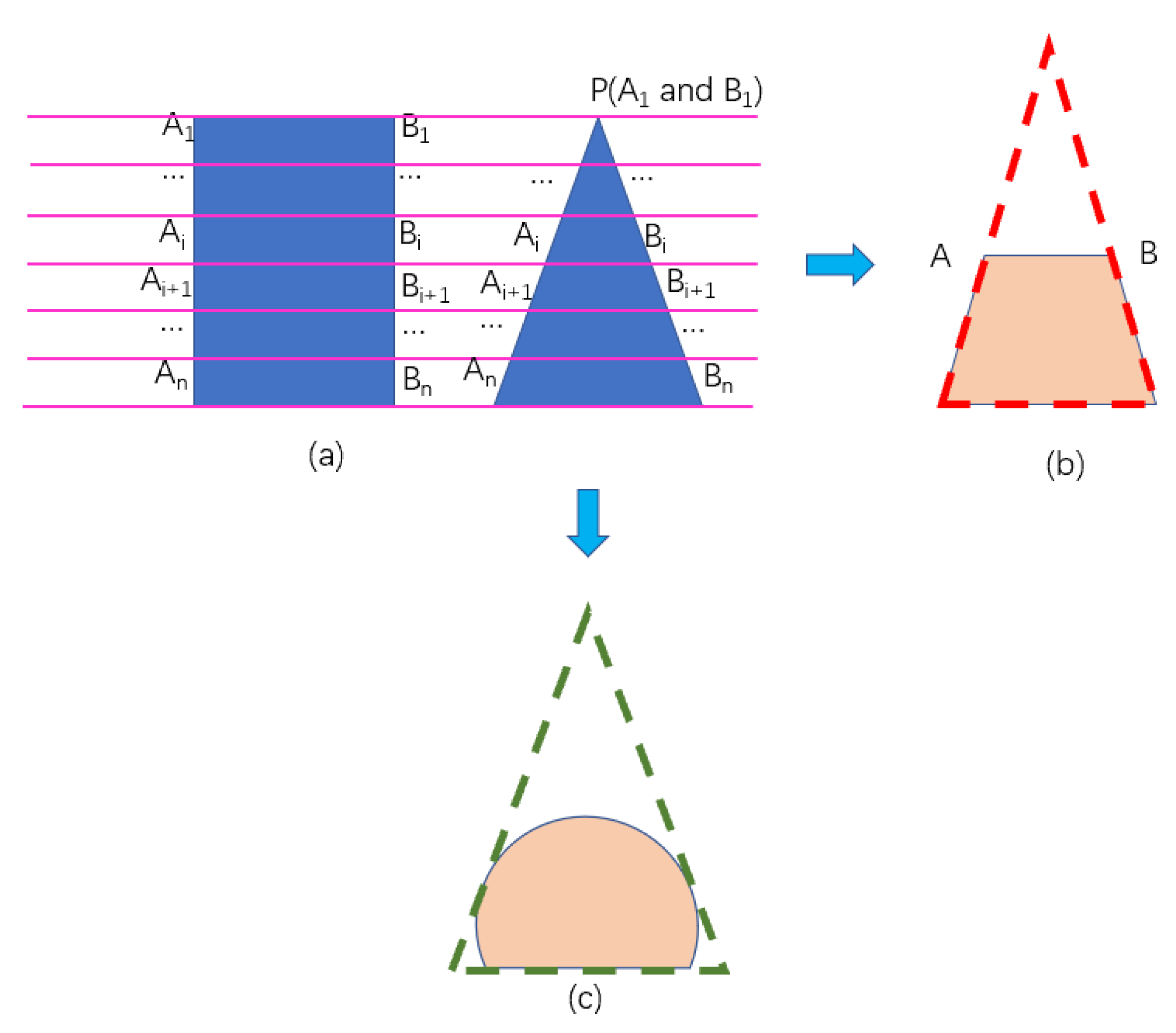
- The tree crowns points can be projected onto the plane of the profile plane, and in that way, the 3D points can be transferred to 2D points , then a series of excellent algorithms can be used, such as the alpha shapes algorithm [60] which is one of the best algorithms to get the shape of the point set δC as the Figure 12 shows. In addition, the user can also control the shape δC of set by adjusting the unique parameter α of the algorithm.
- (3)
- The generation of the key points of the δC. As the Figure 13 shows, select any point A1 of the δC as the starting point and calculate the distance to the connecting line of the adjacent two points. If the distance d is bigger than the threshold T, the point is signed as a key point, otherwise it is signed as an un-key point. Keep calculating until all the edge points are judged, then the first turnkey point set is obtained. Use the same method to judge the key points set and keep iterating until the number of key points does not change and finally the key point set of the crown section boundary is obtained.
- (4)
- In the sparse northeast forest region of China, airborne LiDAR points data can basically obtain the complete shapes of the tree crowns. Therefore, the shape information of the tree crown can be extracted by obtaining the outer contour of the tree crown key points. In this paper, the parallel line segment length comparison method (PLSM) is used to realize the fitting of the crown shape, and to finally realize the structural composition of the whole crown. The specific steps of PLSM are as follows:
- (a)
- From (3), the crown shape can be described by the key points, and the key points can be sorted in descending order by the Z value of the key points.
- (a)
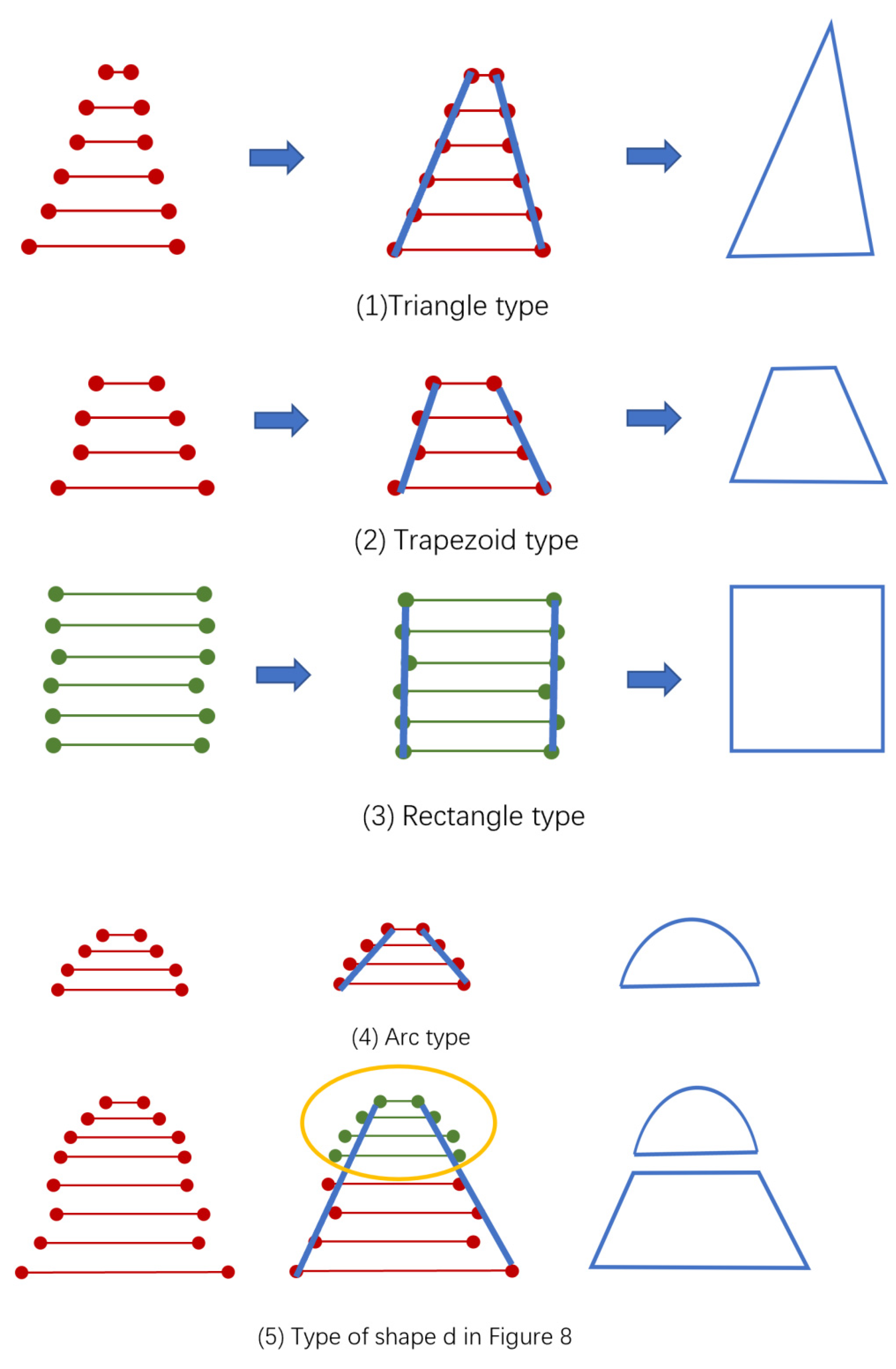
- Starting from the top of the tree, parallel lines are divided along the direction of the tree stem, which can be defined as the vertical line connecting the top of the tree crown and the root ground point. As shown in Figure 14, the intersection points of the parallel line and the line segments of the key points are calculated. The horizontal distance of the intersection points is the length of the line segment. The length of the intersection line of each line segment is recorded, and the length of adjacent line segments is compared, as in the following situation:
- (c)
- From Figure 14, using the line segments color, the shapes of the tree crowns can be classified into two basic shapes, namely triangles and rectangles. Triangles are further classified into triangles, trapezoids and sectors.
The Classification of the Tree Species Using Shape Fitting Method
3. Experiment and Result
3.1. Location and Segmentation of Trees
- N: The number of the sample plots.
- CTNi: The calculated tree number of the ith plot.
- TTNi: The true tree number of the ith plot.
3.2. Tree Species Classification
4. Discussion
4.1. The Segmentation of the Trees
4.2. Tree Species Classification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kangas, A.; Gove, J.; Scott, C. Introduction: Forest Inventory; Springer: Dordrecht, The Netherlands, 2006; pp. 3–11. [Google Scholar]
- Wulder, M.A.; Bater, C.W.; Coops, N.C.; Hilker, T.; White, J.C. The role of LiDAR in sustainable forest management. For. Chron. 2008, 84, 807–826. [Google Scholar] [CrossRef] [Green Version]
- Leckie, D.G.; Gillis, M.D. Forest inventory in Canada with emphasis on map production. For. Chron. 1995, 71, 74–88. [Google Scholar] [CrossRef]
- Gillis, M.D.; Omule, A.Y.; Brierley, T. Monitoring Canada's forests: The National Forest Inventory. For. Chron. 2005, 81, 214–221. [Google Scholar] [CrossRef]
- Mckinley, D.C.; Ryan, M.G.; Birdsey, R.A.; Giardina, C.P.; Harmon, M.E.; Heath, L.S.; Houghton, R.A.; Jackson, R.B.; Morrison, J.F.; Murray, B.C.; et al. A synthesis of current knowledge on forests and carbon storage in the United States. Ecol. Appl. 2011, 21, 1902–1924. [Google Scholar] [CrossRef] [Green Version]
- Roberts, J.; Tesfamichael, S.; Gebreslasie, M.; Aardt, J.; Ahmed, F. Forest structural assessment using remote sensing tech-nologies: An overview of the current state of the art. South. Hemisph. For. J. 2007, 69, 183–203. [Google Scholar] [CrossRef]
- Reese, H.; Nilsson, M.; Sandström, P.; Olsson, H. Applications using estimates of forest parameters derived from satellite and forest inventory data. Comput. Electron. Agric. 2002, 37, 37–55. [Google Scholar] [CrossRef] [Green Version]
- van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Culvenor, D.S. TIDA: Analgorithm for the delineation of tree crowns in high spatial resolution remotely sensed imagery. Comput. Geosc. 2002, 28, 33–44. [Google Scholar] [CrossRef]
- Turner, W.; Spector, S.; Gardiner, N.; Fladeland, M.; Sterling, E.; Steininger, M. Remote sensing for biodiversity science and conservation. Trends Ecol. Evol. 2003, 18, 306–314. [Google Scholar] [CrossRef]
- Smith, B.; Knorr, W.; Widlowski, J.-L.; Pinty, B.; Gobron, N. Combining remote sensing data with process modelling to monitor boreal conifer forest carbon balances. For. Ecol. Manag. 2008, 255, 3985–3994. [Google Scholar] [CrossRef]
- Koetz, B.; Sun, G.; Morsdorf, F.; Ranson, K.; Kneubühler, M.; Itten, K.; Allgöwer, B. Fusion of imaging spectrometer and LIDAR data over combined radiative transfer models for forest canopy characterization. Remote Sens. Environ. 2007, 106, 449–459. [Google Scholar] [CrossRef]
- Drake, J.B.; Dubayah, R.O.; Clark, D.B.; Knox, R.G.; Blair, J.B.; Hofton, M.A.; Chazdon, R.L.; Weishampel, J.F.; Prince, S. Estimation of tropical forest structural characteristics using large-footprint lidar. Remote Sens. Environ. 2002, 79, 305–319. [Google Scholar] [CrossRef]
- Lillesand, T.; Kiefer, R.; Chipman, J. Remote Sensing and Image Interpretation; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Kumar, L.; Schmidt, K.; Dury, S.; Skidmore, A. Imaging Spectrometry and Vegetation Science. In Imaging Spectrometry: Basic Principles and Prospective Applications; Springer: Dordrecht, The Netherlands, 2001; pp. 111–155. [Google Scholar]
- Zhen, Z.; Quackenbush, L.J.; Zhang, L. Trends in Automatic Individual Tree Crown Detection and Delineation—Evolution of LiDAR Data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Ballanti, L.; Blesius, L.; Hines, E.; Kruse, B. Tree Species Classification Using Hyperspectral Imagery: A Comparison of Two Classifiers. Remote Sens. 2016, 8, 445. [Google Scholar] [CrossRef] [Green Version]
- Ab Majid, I.; Abd Latif, Z.; Adnan, N.A. Tree species classification using worldview-3 data. In Proceedings of the 2016 7th IEEE Control and System Graduate Research Colloquium (ICSGRC), Shah Alam, Malaysia, 8 August 2016. [Google Scholar]
- Wong, F.K.K.; Fung, T. Combining EO-1 Hyperion and Envisat ASAR data for mangrove species classification in Mai Po Ramsar Site, Hong Kong. Int. J. Remote Sens. 2014, 35, 7828–7856. [Google Scholar] [CrossRef]
- Dostálová, A.; Lang, M.; Ivanovs, J.; Waser, L.T.; Wagner, W. European wide forest classification based on Senti-nel-1 data. Remote Sens. 2021, 13, 337. [Google Scholar] [CrossRef]
- Zhao, F.; Sun, R.; Zhong, L.; Meng, R.; Huang, C.; Zeng, X.; Wang, M.; Li, Y.; Wang, Z. Monthly mapping of forest harvesting using dense time series Sentinel-1 SAR imagery and deep learning. Remote Sens. Environ. 2022, 269, 112822. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. Earth Environ. 2003, 27, 88–106. [Google Scholar] [CrossRef] [Green Version]
- Bjerreskov, K.S.; Nord-Larsen, T.; Fensholt, R. Classification of nemoral forests with fusion of multi-temporal Sen-tinel-1 and 2 data. Remote Sens. 2021, 13, 950. [Google Scholar] [CrossRef]
- NOAA. LIDAR—Light Detection and Ranging—Is a Remote Sensing Method Used to Examine the Surface of the Earth; NOAA: Washington, DC, USA, 2013. [Google Scholar]
- Bellakaout, A.; Cherkaoui, M.; Ettarid, M.; Touzani, A. Automatic 3D Extraction of Buildings, Vegetation and Roads from LIDAR Data. In Proceedings of the XXIII ISPRS CONGRESS, COMMISSION III. In Proceedings of the International Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; Volume 41, pp. 173–180. [Google Scholar]
- Ritchie, J.C. Remote sensing applications to hydrology: Airborne laser altimeters. Hydrol. Sci. J. 1996, 41, 625–636. [Google Scholar] [CrossRef] [Green Version]
- Mallet, C.; Bretar, F. Full-waveform topographic lidar: State-of-the-art. ISPRS journal of photogrammetry and remote sensing 2009, 64, 1–16. [Google Scholar] [CrossRef]
- Holmgren, J.; Persson, Å. Identifying species of individual trees using airborne laser scanner. Remote Sens. Environ. 2004, 90, 415–423. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H. Seeing the trees in the forest: Using lidar and multispectral data fusion with local filtering and variable window size for estimating tree height. Photogramm. Eng. Remote Sens. 2004, 70, 589–604. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating Individual Trees in a Savanna Woodland Using Small Footprint Lidar Data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef] [Green Version]
- Lovell, J.; Jupp, D.; Newnham, G.; Coops, N.; Culvenor, D. Simulation study for finding optimal lidar acquisition parameters for forest height retrieval. For. Ecol. Manag. 2005, 214, 398–412. [Google Scholar] [CrossRef]
- Michael, A.L.; Michael, K.; Yong, P.; Plinio, B.; Maria, O.H. Revised method for forest canopy height estimation from Ge-oscience Laser Altimeter System waveforms. J. Appl. Remote Sens. 2007, 1, 013537. [Google Scholar]
- Riaño, D.; Meier, E.; Allgöwer, B.; Chuvieco, E.; Ustin, S.L. Modeling airborne laser scanning data for the spatial generation of critical forest parameters in fire behavior modeling. Remote Sens. Environ. 2003, 86, 177–186. [Google Scholar] [CrossRef]
- Lee, A.C.; Lucas, R.M. A LiDAR-derived canopy density model for tree stem and crown mapping in Australian forests. Remote Sens. Environ. 2007, 111, 493–518. [Google Scholar] [CrossRef]
- Wagner, W.; Hollaus, M.; Briese, C.; Ducic, V. 3D vegetation mapping using small-footprint full-waveform airborne laser scanners. Int. J. Remote Sens. 2008, 29, 1433–1452. [Google Scholar] [CrossRef] [Green Version]
- Maltamo, M.; Eerikäinen, K.; Pitkänen, J.; Hyyppä, J.; Vehmas, M. Estimation of timber volume and stem density based on scanning laser altimetry and expected tree size distribution functions. Remote Sens. Environ. 2004, 90, 319–330. [Google Scholar] [CrossRef]
- Reitberger, J.; Krzystek, P.; Stilla, U. Analysis of full waveform LiDAR data for the classification of deciduous and coniferous trees. Int. J. Remote Sens. 2008, 29, 1407–1431. [Google Scholar] [CrossRef]
- Tong, X.; Li, X.; Xu, X.; Xie, H.; Feng, T.; Sun, T.; Jin, Y.; Liu, X. A Two-Phase Classification of Urban Vegetation Using Airborne LiDAR Data and Aerial Photography. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4153–4166. [Google Scholar] [CrossRef]
- Selmi, W.; Selmi, S.; Teller, J.; Weber, C.; Riviere, E.; Nowak, D.J. Nowak, Prioritizing the provision of urban ecosystem services in deprived areas, a question of environmental justice. Ambio 2020, 6, 1035–1046. [Google Scholar]
- Zięba-Kulawik, K.; Skoczylas, K.; Wężyk, P.; Teller, J.; Mustafa, A.; Omrani, H. Monitoring of urban forests using 3D spatial indices based on LiDAR point clouds and voxel approach. Urban For. Urban Green. 2021, 65, 127324. [Google Scholar] [CrossRef]
- Li, X.; Wen, C.; Cao, Q.; Du, Y.; Fang, Y. RETRACTED: A novel semi-supervised method for airborne LiDAR point cloud classification. ISPRS J. Photogramm. Remote Sens. 2021, 180, 117–129. [Google Scholar] [CrossRef]
- Liu, M.; Han, Z.; Chen, Y.; Liu, Z.; Han, Y. Tree species classification of LiDAR data based on 3D deep learning. Measurement 2021, 177, 109301. [Google Scholar] [CrossRef]
- Bruggisser, M.; Roncat, A.; Schaepman, M.E.; Morsdorf, F. Retrieval of higher order statistical moments from full-waveform LiDAR data for tree species classification. Remote Sens. Environ. 2017, 196, 28–41. [Google Scholar] [CrossRef]
- Blomley, R.; Hovi, A.; Weinmann, M.; Hinz, S.; Korpela, I.; Jutzi, B. Tree species classification using within crown localization of waveform LiDAR attributes. ISPRS J. Photogramm. Remote Sens. 2017, 133, 142–156. [Google Scholar] [CrossRef]
- Harikumar, A.; Bovolo, F.; Bruzzone, L. An Internal Crown Geometric Model for Conifer Species Classification With High-Density LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2924–2940. [Google Scholar] [CrossRef]
- Kim, S.; McGaughey, R.J.; Andersen, H.E.; Schreuder, G. Tree species differentiation using intensity data derived from leaf-on and leaf-off airborne laser scanner data. Remote Sens. Environ. 2009, 113, 1575–1586. [Google Scholar] [CrossRef]
- Qin, H.; Zhou, W.; Yao, Y.; Wang, W. Individual tree segmentation and tree species classification in sub-tropical broadleaf forests using UAV-based LiDAR, hyperspectral, and ultrahigh-resolution RGB data. Remote Sens. Environ. 2022, 280, 113143. [Google Scholar] [CrossRef]
- Ferreira, M.P.; de Almeida, D.R.A.; Papa, D.D.A.; Minervino, J.B.S.; Veras, H.F.P.; Formighieri, A.; Santos, C.A.N.; Ferreira, M.A.D.; Figueiredo, E.O.; Ferreira, E.J.L. Individual tree detection and species classification of Amazonian palms using UAV images and deep learning. For. Ecol. Manag. 2020, 475, 118397. [Google Scholar] [CrossRef]
- Wagner, F.H.; Sanchez, A.; Tarabalka, Y.; Lotte, R.G.; Ferreira, M.P.; Aidar, M.P.; Gloor, E.; Phillips, O.L.; Aragao, L.E. Using the U-net convolutional network to map forest types and disturbance in the Atlantic rainforest with very high resolution images. Remote Sens. Ecol. Conserv. 2019, 5, 360–375. [Google Scholar] [CrossRef] [Green Version]
- Weinstein, B.G.; Marconi, S.; Bohlman, S.; Zare, A.; White, E. Individual Tree-Crown Detection in RGB Imagery Using Semi-Supervised Deep Learning Neural Networks. Remote Sens. 2019, 11, 1309. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Hinckley, T.; Briggs, D. Classifying individual tree genera using stepwise cluster analysis based on height and intensity metrics derived from airborne laser scanner data. Remote Sens. Environ. 2010, 115, 3329–3342. [Google Scholar] [CrossRef]
- Zhao, Q.; Yu, S.; Zhao, F.; Tian, L.; Zhao, Z. Comparison of machine learning algorithms for forest parameter estimations and application for forest quality assessments. For. Ecol. Manag. 2019, 434, 224–234. [Google Scholar] [CrossRef]
- Peng, L.; Liu, K.; Cao, J.; Zhu, Y.; Li, F.; Liu, L. Combining GF-2 and RapidEye satellite data for mapping mangrove species using ensemble machine-learning methods. Int. J. Remote Sens. 2019, 41, 813–838. [Google Scholar] [CrossRef]
- Wu, C.; Shen, H.; Shen, A.; Deng, J.; Gan, M.; Zhu, J.; Xu, H.; Wang, K. Comparison of machine-learning methods for above-ground biomass estimation based on Landsat imagery. J. Appl. Remote Sens. 2016, 10, 35010. [Google Scholar] [CrossRef]
- Pham, T.D.; Yoshino, K.; Le, N.N.; Bui, D.T. Estimating aboveground biomass of a mangrove plantation on the Northern coast of Vietnam using machine learning techniques with an integration of ALOS-2 PALSAR-2 and Sentinel-2A data. Int. J. Remote Sens. 2018, 39, 7761–7788. [Google Scholar] [CrossRef]
- Jachowski, N.R.A.; Quak, M.S.Y.; Friess, D.A.; Duangnamon, D.; Webb, E.L.; Ziegler, A.D. Mangrove biomass estimation in southwest Thailand using machine learning. Appl. Geogr. 2013, 45, 311–321. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, Q.; Huang, H.; Huang, Y.; Tao, J.; Zhou, G.; Zhang, Y.; Yang, Y.; Lin, J. Aboveground biomass of typical invasive mangroves and its distribution patterns using UAV-LiDAR data in a subtropical estuary Maoling River estuary, Guangxi, China. Ecol. Indic. 2022, 136, 108694. [Google Scholar] [CrossRef]
- Axelsson, P. Processing of laser scanner data—Algorithms and applications. ISPRS J. Photogramm. Remote Sens. 1999, 54, 138–147. [Google Scholar] [CrossRef]
- De Berg, M.; Van Kreveld, M.; Overmars, M.; Schwarzkopf, O.C. Computational Geometry; Springer: Dordrecht, The Netherlands, 2000. [Google Scholar]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Tree species classification in the Southern Alps based on the fusion of very high geometrical resolution multispectral/hyperspectral images and LiDAR data. Remote Sens. Environ. 2012, 123, 258–270. [Google Scholar] [CrossRef]
- Liu, M.; Han, Z.; Chen, Y.; Liu, Z.; Han, Y. Classification of tree species for three-dimensional depth learning of airborne lidar data. J. Natl. Univ. Def. Technol. 2022, 44, 123–130. (In Chinese) [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties of the Data | Contents |
|---|---|
| Attitude of points (m) | 1000 |
| Points density (pts/m2) | 20 |
| LiDAR scanner type | riegl-vq-1560i |
| Overlap of flight lines | 20% |
| Horizontal accuracy(cm) | 15~25 |
| Vertical accuracy | 15 |
| Flight platform | Cessna 208b aircraft |
| Tree Species | Number | Plot ID |
|---|---|---|
| Pine | 233 | Plot 1~Plot 10 |
| Birch | 109 | Plot 2, Plot 5 |
| Cedar | 113 | Plot 3, Plot 4, Plot 7 |
| Tsubaki | 67 | Plot 2, Plot 7, Plot 9, Plot 10 |
| Shrub | 148 | Plot 3, Plot 6, Plot 8, Plot 9 |
| Others | 111 | Plot 1~Plot 10 |
| Total | 781 | Plot 1~Plot 10 |
| Plot ID | d = 1, HT = 1 | d = 1.5, HT = 1 | d = 2, HT = 1 | d = 2.5, HT = 1 | d = 1, HT = 1.5 | d = 1, HT = 2 | d = 1, HT = 2.5 | TTN | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RTN | CTN | RTN | CTN | RTN | CTN | RTN | CTN | RTN | CTN | RTN | CTN | RTN | CTN | ||
| 1 | 357 | 125 | 167 | 121 | 110 | 109 | 73 | 109 | 307 | 121 | 224 | 121 | 187 | 106 | 118 |
| 2 | 168 | 96 | 97 | 92 | 91 | 91 | 91 | 91 | 142 | 96 | 115 | 96 | 83 | 81 | 90 |
| 3 | 151 | 58 | 73 | 51 | 45 | 45 | 45 | 45 | 123 | 54 | 107 | 54 | 67 | 45 | 50 |
| 4 | 153 | 84 | 81 | 75 | 68 | 68 | 46 | 46 | 117 | 77 | 89 | 71 | 69 | 63 | 74 |
| 5 | 45 | 43 | 42 | 42 | 39 | 39 | 27 | 27 | 44 | 43 | 37 | 35 | 31 | 29 | 42 |
| 6 | 131 | 71 | 71 | 67 | 67 | 67 | 41 | 41 | 114 | 68 | 67 | 61 | 43 | 37 | 66 |
| 7 | 132 | 68 | 66 | 65 | 66 | 65 | 45 | 45 | 121 | 66 | 79 | 57 | 48 | 41 | 65 |
| 8 | 249 | 121 | 125 | 119 | 107 | 107 | 71 | 71 | 179 | 118 | 129 | 109 | 97 | 92 | 116 |
| 9 | 165 | 67 | 83 | 59 | 54 | 54 | 38 | 38 | 125 | 61 | 103 | 53 | 59 | 49 | 58 |
| 10 | 205 | 110 | 117 | 105 | 97 | 97 | 65 | 65 | 165 | 105 | 133 | 93 | 79 | 76 | 102 |
| Tree Species ID | Sample Number | Basic Shape Type | Parameter Type | Parameter Range |
|---|---|---|---|---|
| 01-Pine | 20 | Triangle | (2.1, 4.7) | |
| 02-Birch | 10 | arc and trapezoid | —— | —— |
| 03-Cedar | 10 | arc and rectangle | —— | —— |
| 04-Tsubaki | 8 | Triangle | (0.8, 1.4) | |
| 05-Shrub | 15 | Arc | —— | —— |
| Tree ID | Correct Classified | Type I Error | Type II Error | Correct Rate | |
|---|---|---|---|---|---|
| Shape Fitting | LiDAR Metrics | ||||
| 01-Pine | 217 | 23 | 16 | 93.1% | 92.5% |
| 02-Birch | 98 | 13 | 11 | 89.9% | 88.3% |
| 03-Cedar | 95 | 7 | 18 | 84.1% | 87.1% |
| 04-Tsubaki | 63 | 8 | 4 | 94% | 86.3% |
| 05-Shrub | 142 | 5 | 6 | 95.9% | 93.8% |
| 06-Others | 98 | 12 | 13 | 88.3% | 75% |
| Average | _ | _ | _ | 90.9% | 87.2% |
| 01-Pine | 02-Birch | 03-Cedar | 04-Tsubaki | 05-Shrub | 06-Others | OA (%) | Kappa | |
|---|---|---|---|---|---|---|---|---|
| 01-Pine | 217 | 6 | 12 | 2 | 2 | 1 | 93.14 | 0.8935 |
| 02-Birch | 6 | 98 | 3 | 0 | 0 | 2 | 89.91 | |
| 03-Cedar | 5 | 2 | 95 | 0 | 0 | 0 | 84.08 | |
| 04-Tsubaki | 2 | 0 | 0 | 63 | 2 | 4 | 94.03 | |
| 05-Shrub | 0 | 0 | 0 | 0 | 142 | 5 | 95.95 | |
| 06-Others | 3 | 3 | 3 | 2 | 2 | 98 | 89.1 |
| NO. | Accuracy | Method | Data | Species | Study Area |
|---|---|---|---|---|---|
| 1 | 76.5% | SVM/RF | Fusion data | 7 species and a “non-forest” class | a mountain area in the Southern Alps |
| 2 | 98.6% | CNN | UVA images | 3 palm species | 135 ha within an old-growth Amazon forest |
| 3 | 90.6% | linear discriminant function with a cross validation | LiDAR intensity data | 8 broadleaved and 7 coniferous species | the Washington Park Arboretum, Seattle, Washington, USA |
| 4 | 96%(leaf-off) 85%(leaf-on) | Unsupervised classification | Full waveform LiDAR data | Coniferous, deciduous | in the Bavarian Forest National Park |
| 5 | 86.7% | DNN | UAV LiDAR data | Birch and larch | Saihanba National Forest Park |
| 6 | 90.9% | Shape fitting | LiDAR data | 6 species | the Hupao National Park |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, C.; Yao, C.; Ma, H.; Xu, J.; Wang, J. Tree Species Classification Using Airborne LiDAR Data Based on Individual Tree Segmentation and Shape Fitting. Remote Sens. 2023, 15, 406. https://doi.org/10.3390/rs15020406
Qian C, Yao C, Ma H, Xu J, Wang J. Tree Species Classification Using Airborne LiDAR Data Based on Individual Tree Segmentation and Shape Fitting. Remote Sensing. 2023; 15(2):406. https://doi.org/10.3390/rs15020406
Chicago/Turabian StyleQian, Chen, Chunjing Yao, Hongchao Ma, Junhao Xu, and Jie Wang. 2023. "Tree Species Classification Using Airborne LiDAR Data Based on Individual Tree Segmentation and Shape Fitting" Remote Sensing 15, no. 2: 406. https://doi.org/10.3390/rs15020406
APA StyleQian, C., Yao, C., Ma, H., Xu, J., & Wang, J. (2023). Tree Species Classification Using Airborne LiDAR Data Based on Individual Tree Segmentation and Shape Fitting. Remote Sensing, 15(2), 406. https://doi.org/10.3390/rs15020406