

Mitigating Satellite-Induced Code Pseudorange Variations at GLONASS G3 Frequency Using Periodical Model



Abstract
:1. Introduction
2. Methodology
3. Experimental Results and Discussions
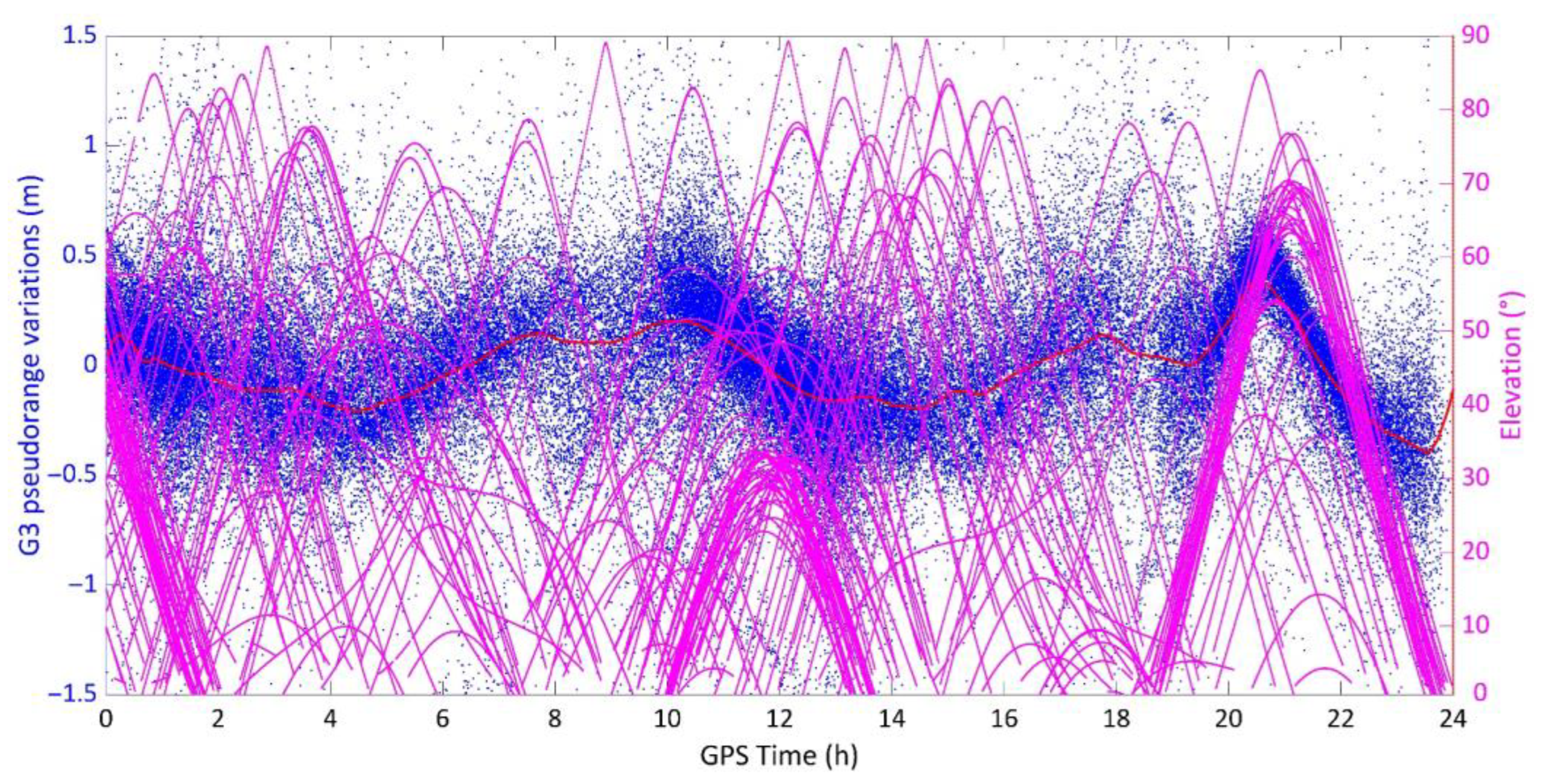
3.1. Characteristic of the Code Pseudorange Variations
3.2. Correlation Analysis of the Code Pseudorange Variations
3.2.1. Elevation-Dependent Modeling
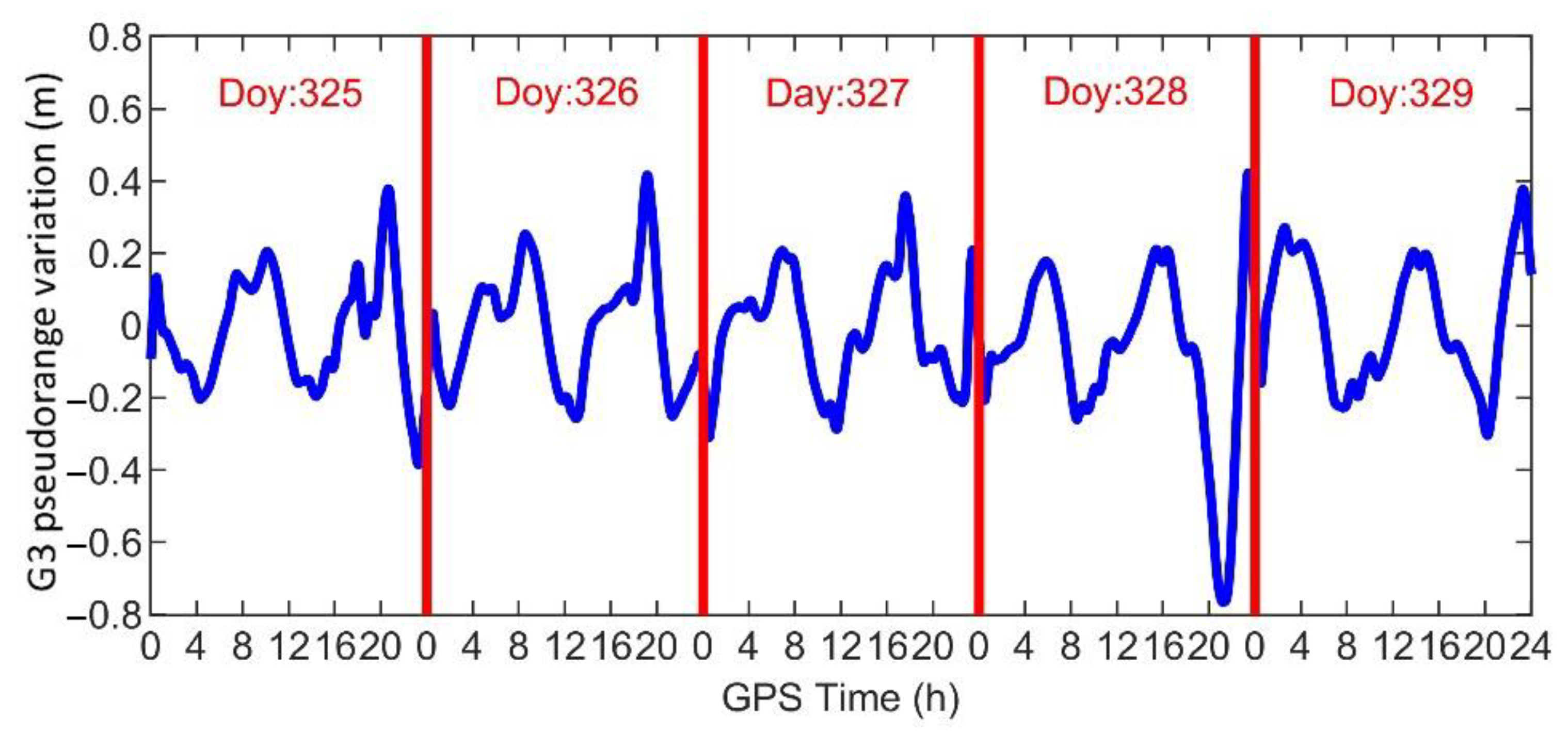
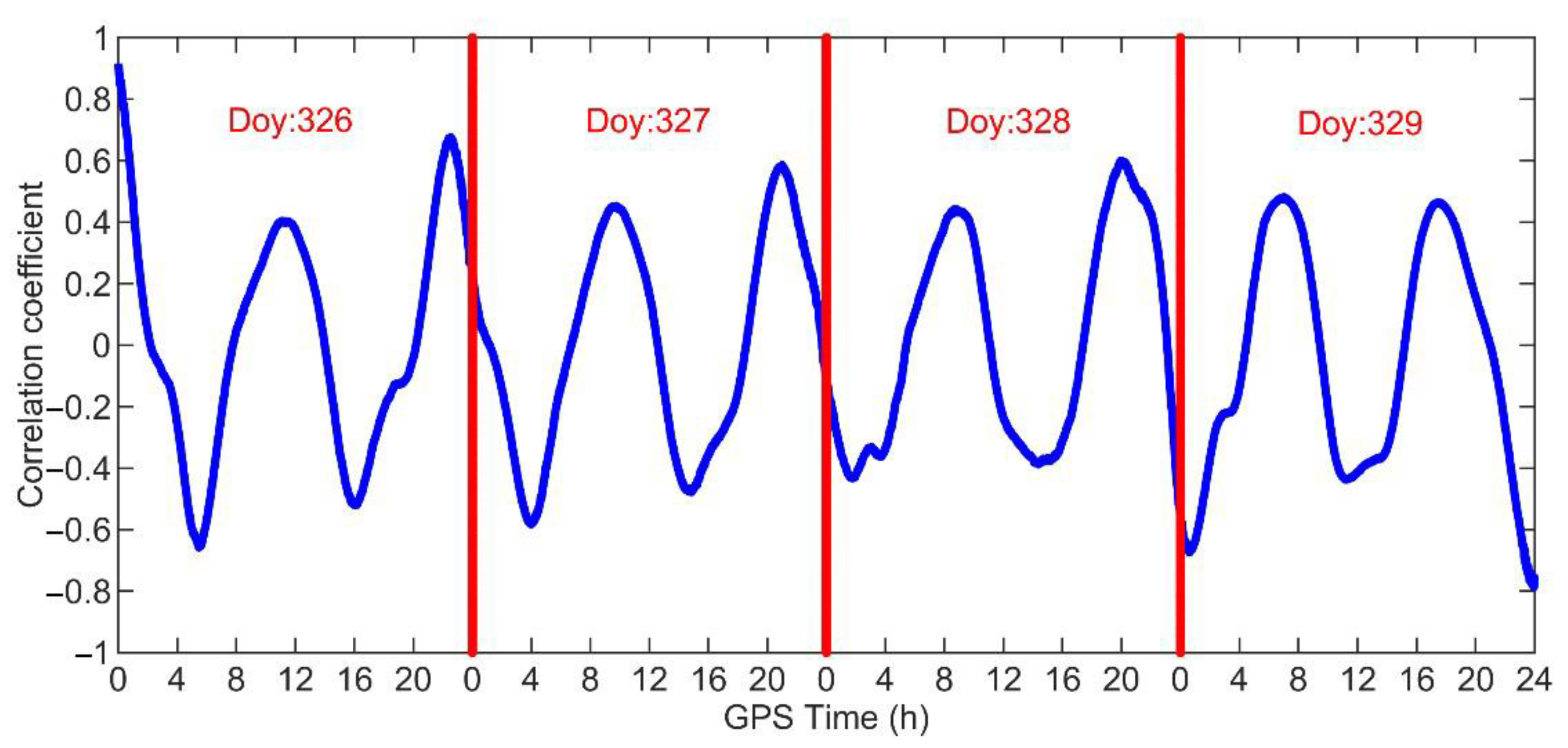
3.2.2. Time-Dependent Modeling
3.3. Modeling of the Code Pseudorange Variations Using Multi-Site
3.4. Validation of the Code Pseudorange Variations Model
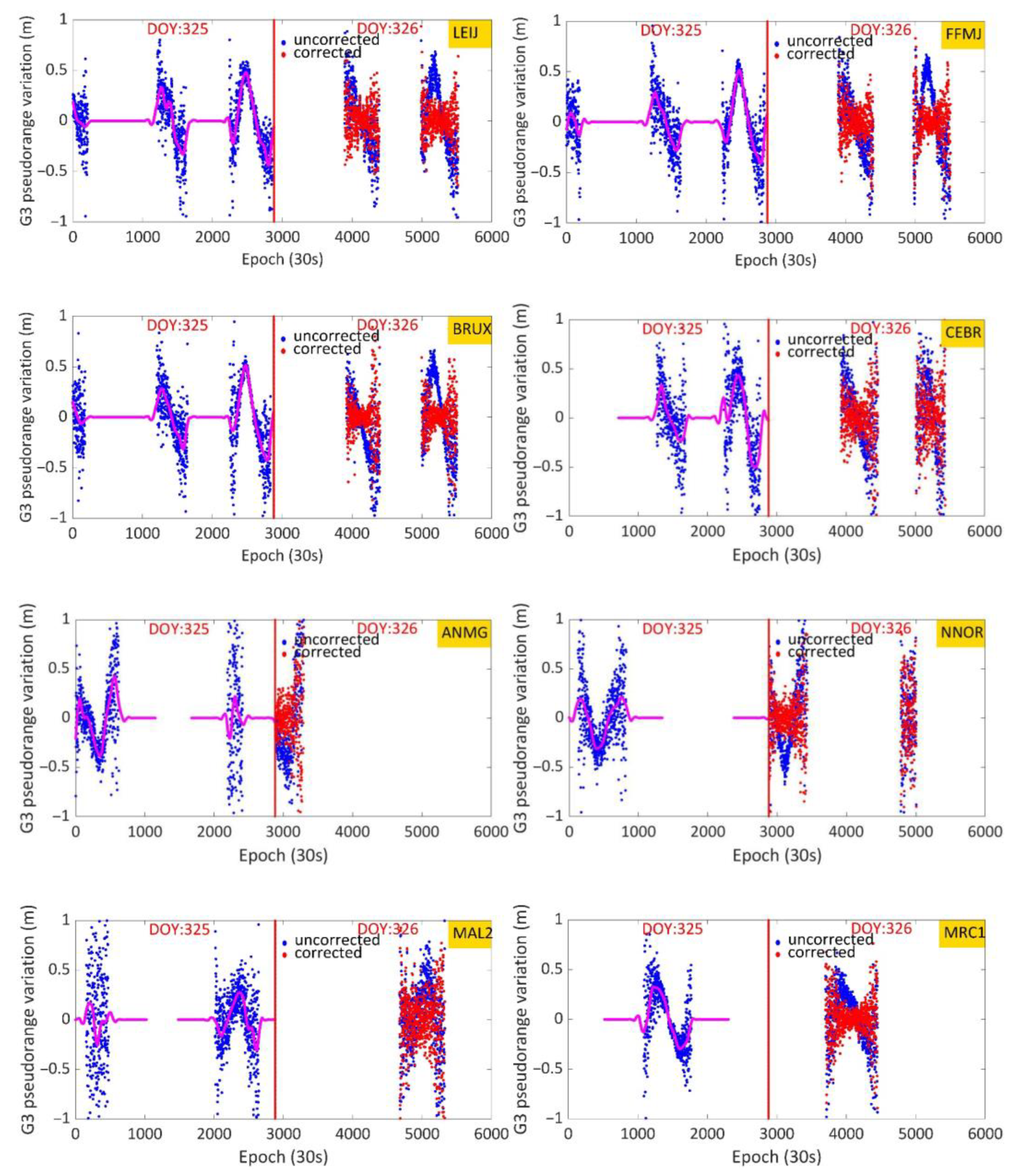
3.4.1. Correction Effect Using a Single-Site Periodical Model
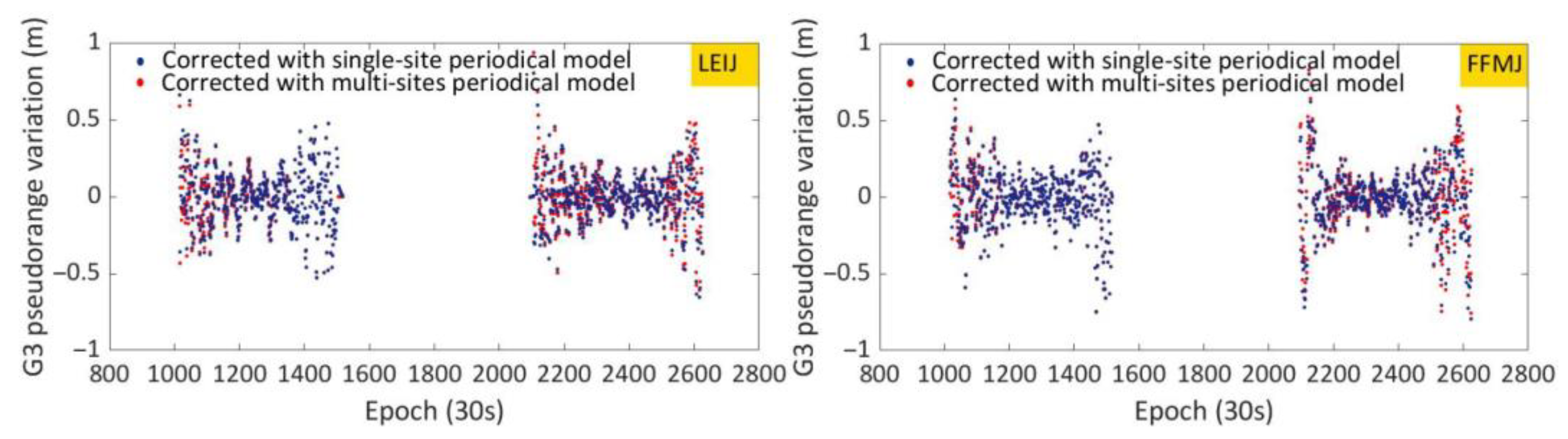
3.4.2. Correction Effect Using a Multi-Site Periodical Model over 24 h
4. Discussion
5. Conclusions
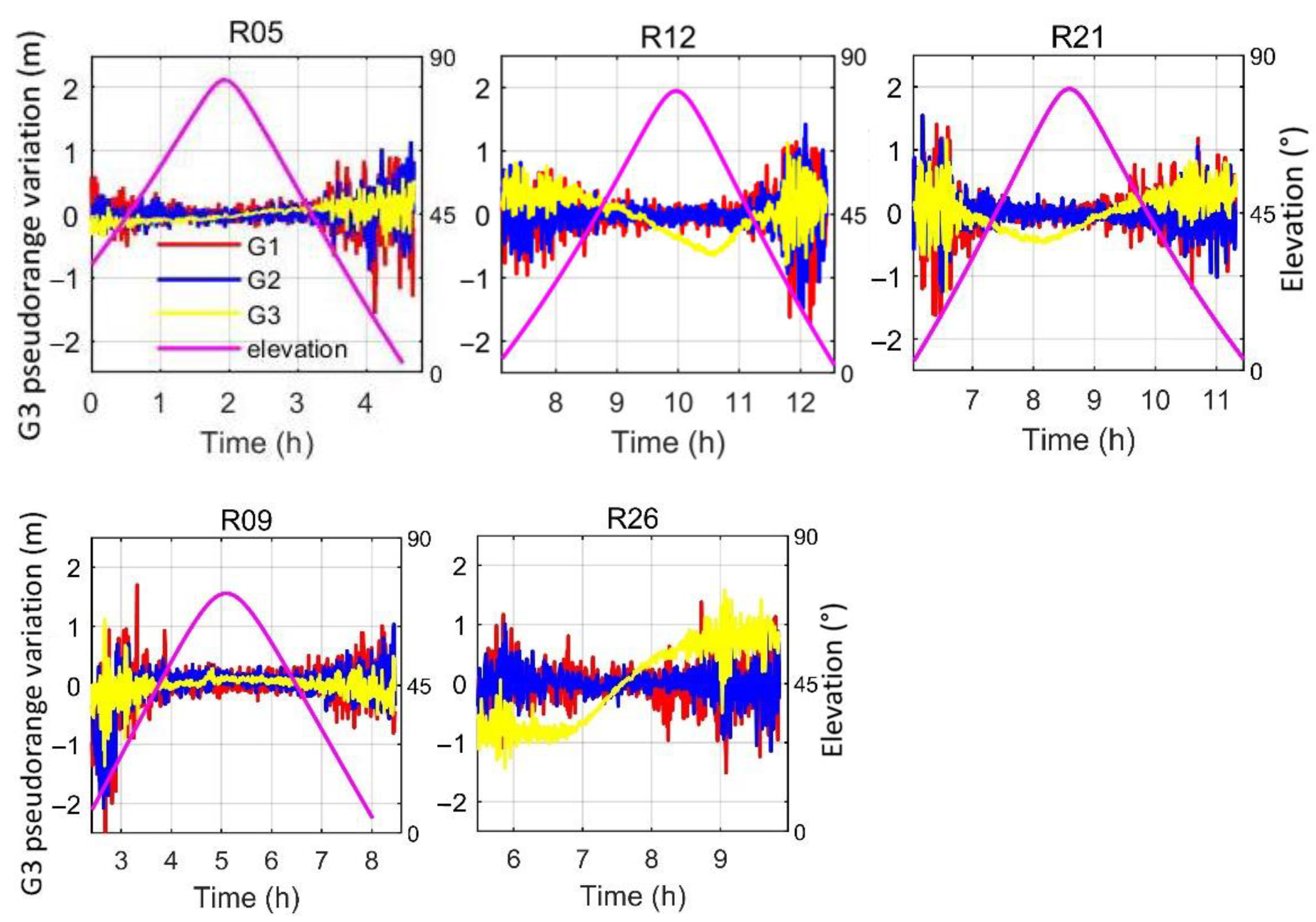
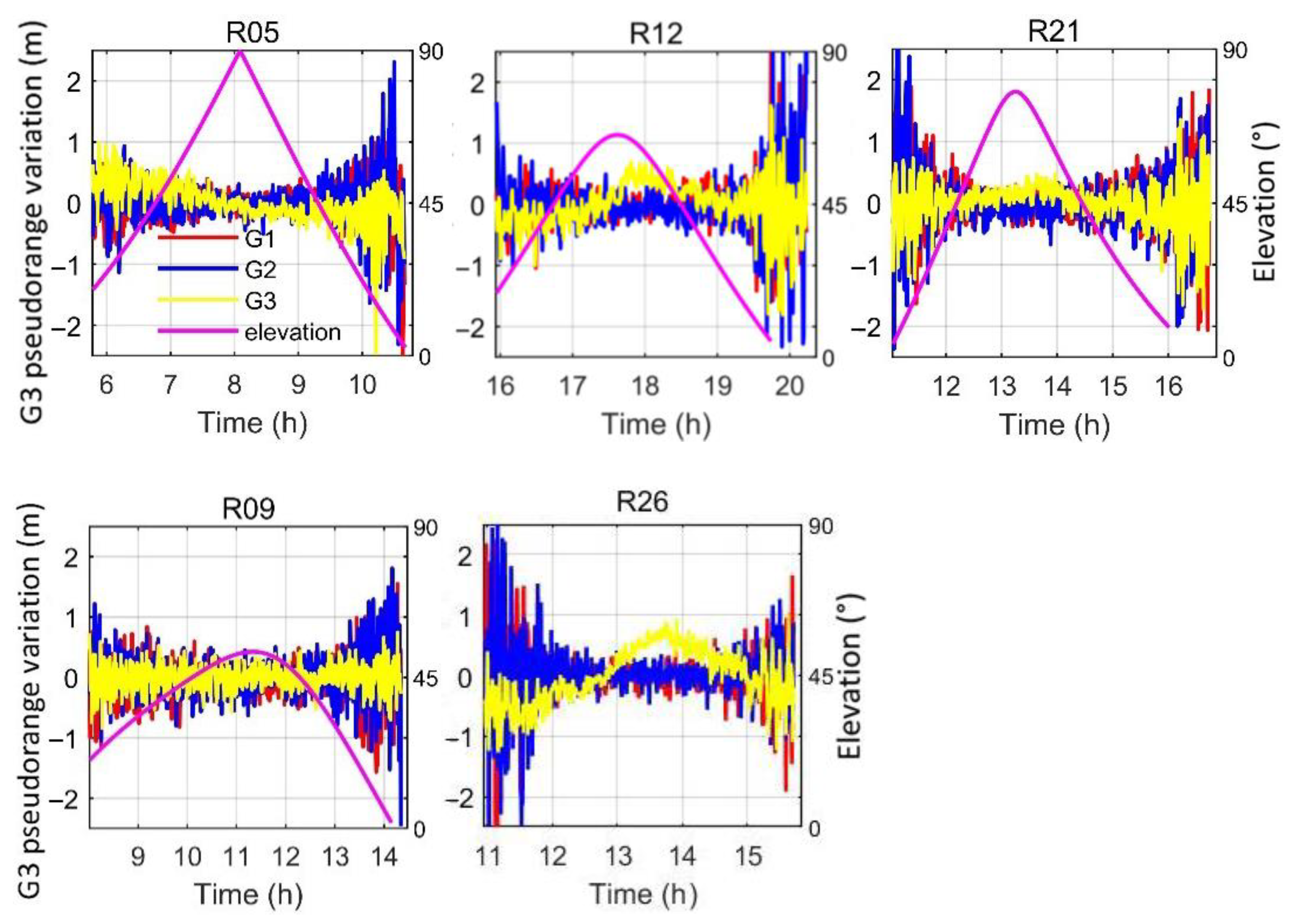
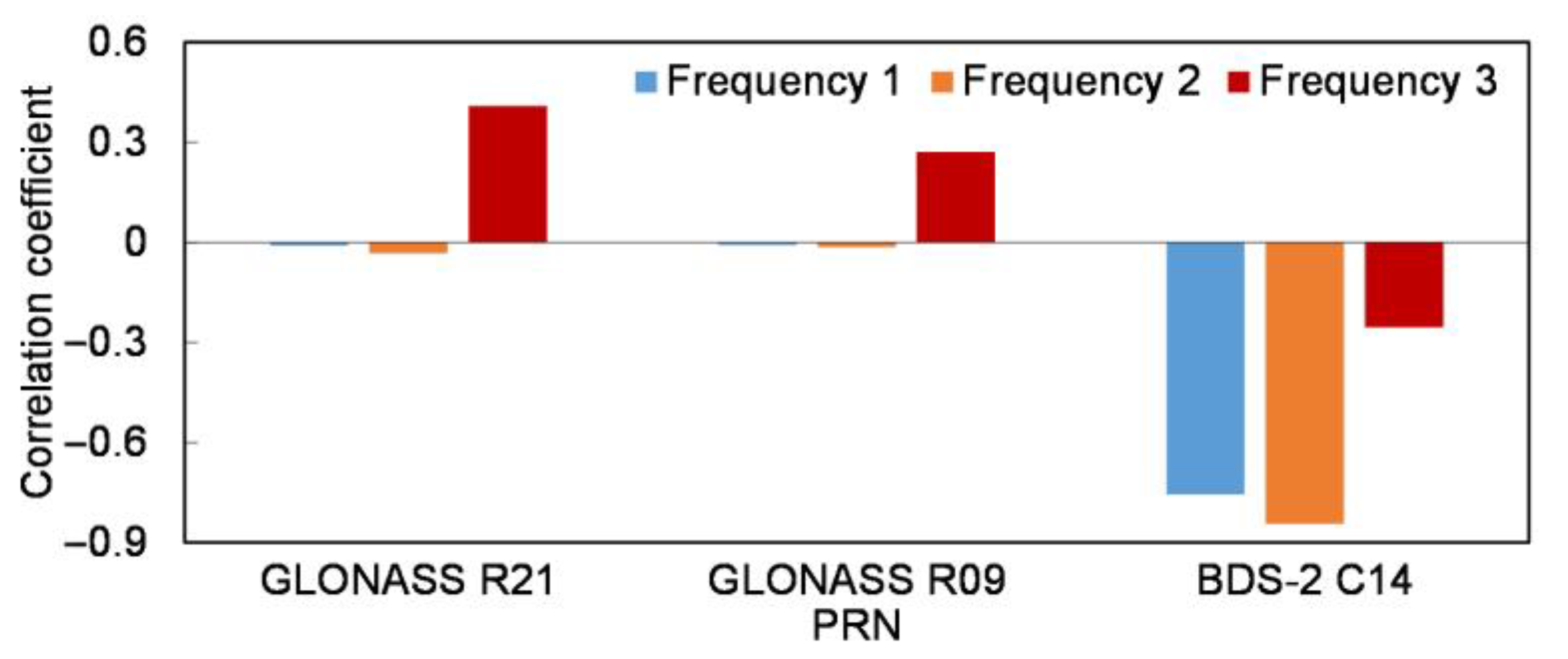
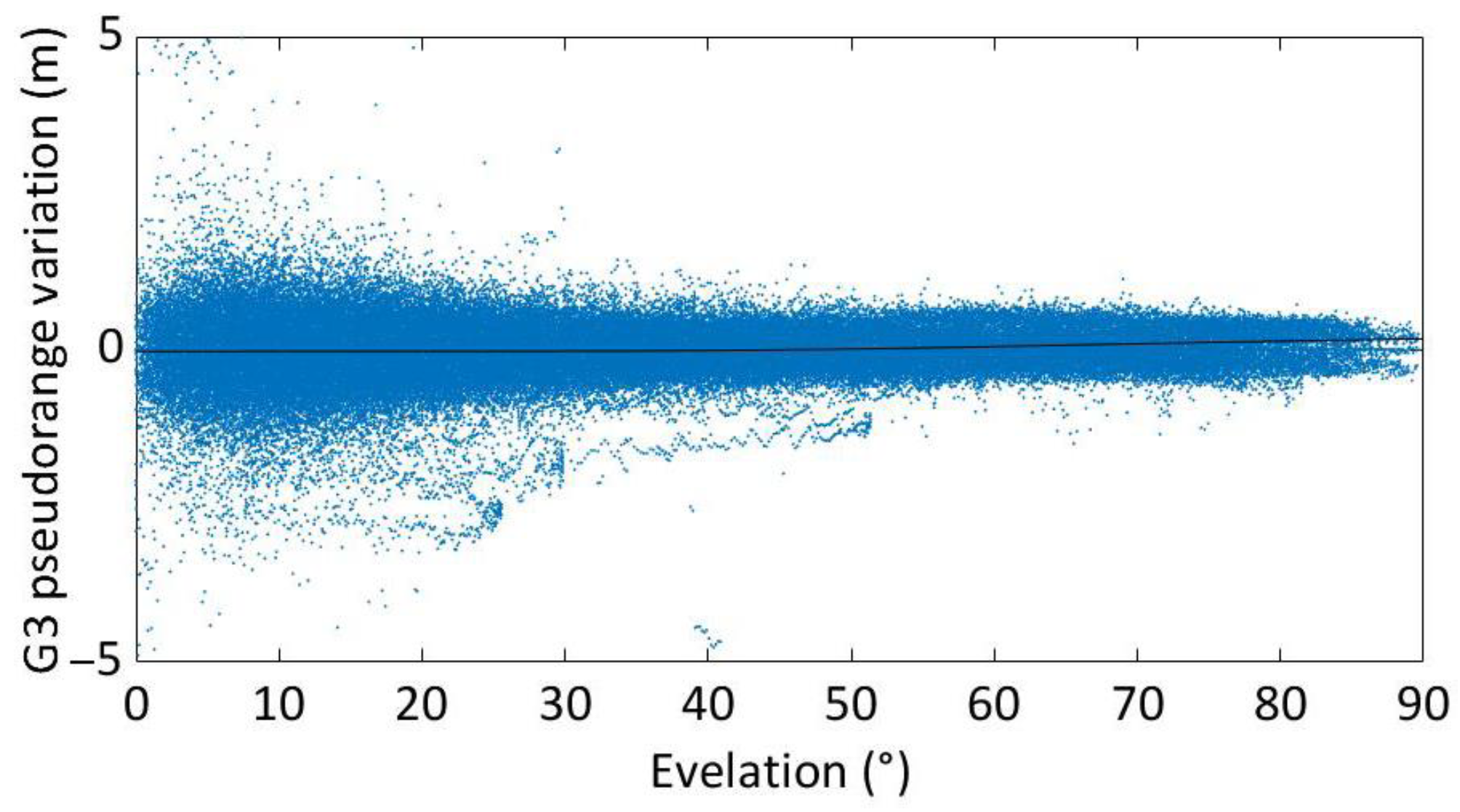
- Compared with the systematic ‘‘V-shape’’ trend of the code pseudorange variations of all the BDS-2 MEO satellites, the ‘‘V-shape’’ variation does not always apply to the GLONASS MEO satellites; in addition, the correlation between the code pseudorange variations and the elevation angle for GLONASS satellites is both weak and opposing, which cannot be modeled using the elevation-dependent model applied to the BDS-2 MEO and IGSO satellites;
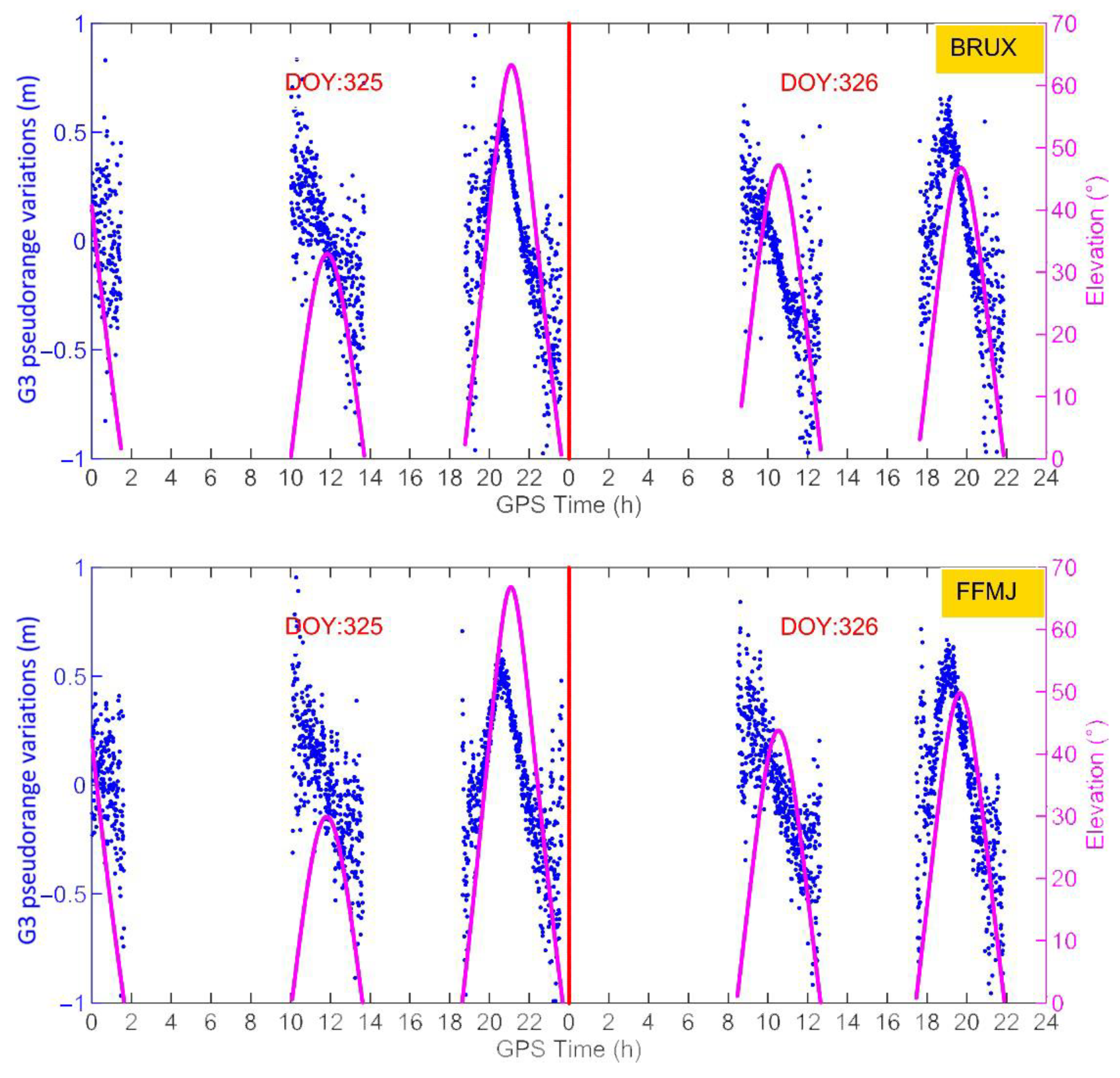
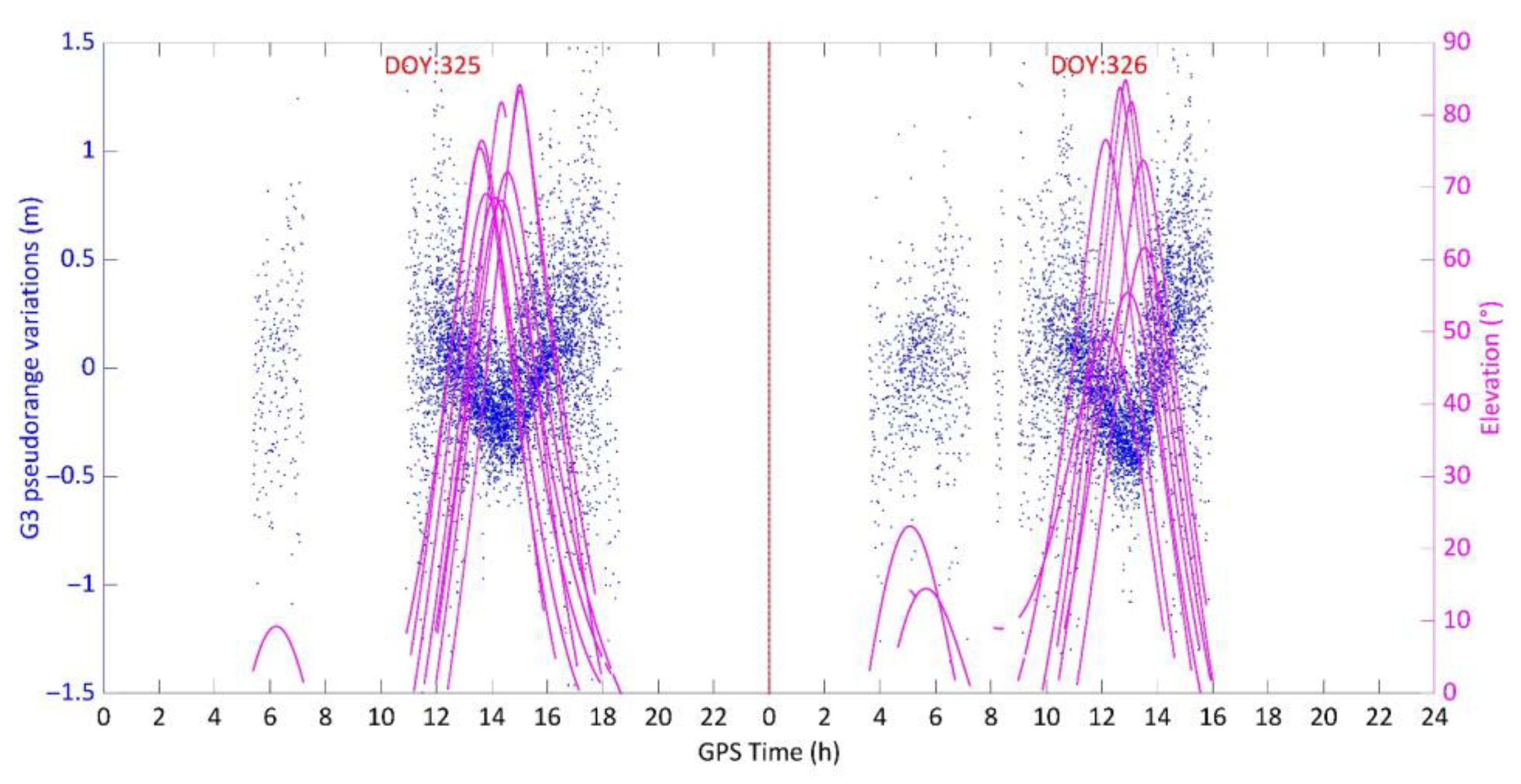
- The code pseudorange variations show strong periodicity, so a periodical correction model can be established; since a single-site periodical correction requires the observation data of the last day of this station or from a nearby station, the continuous multi-site periodical correction model over 24 h is more applicable;
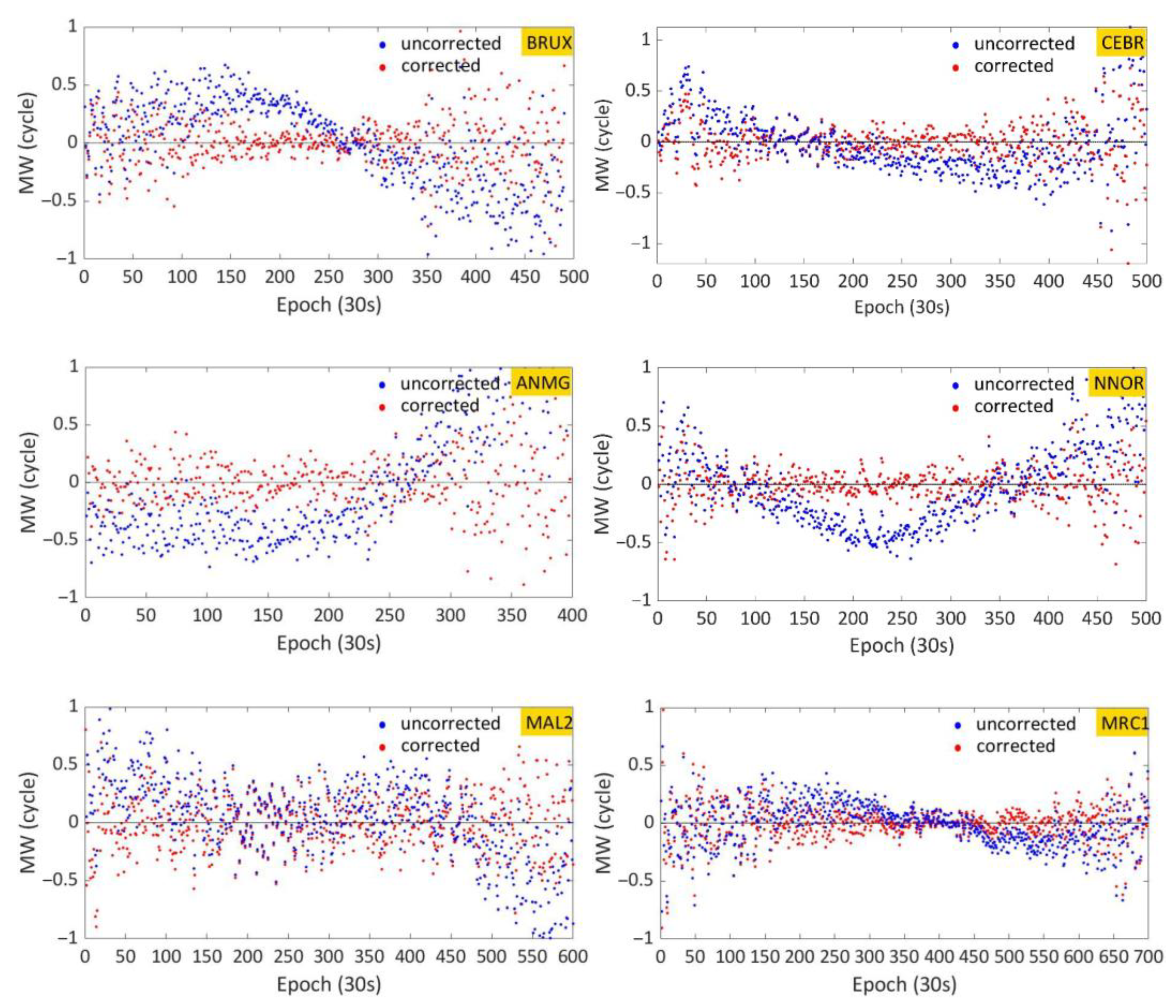
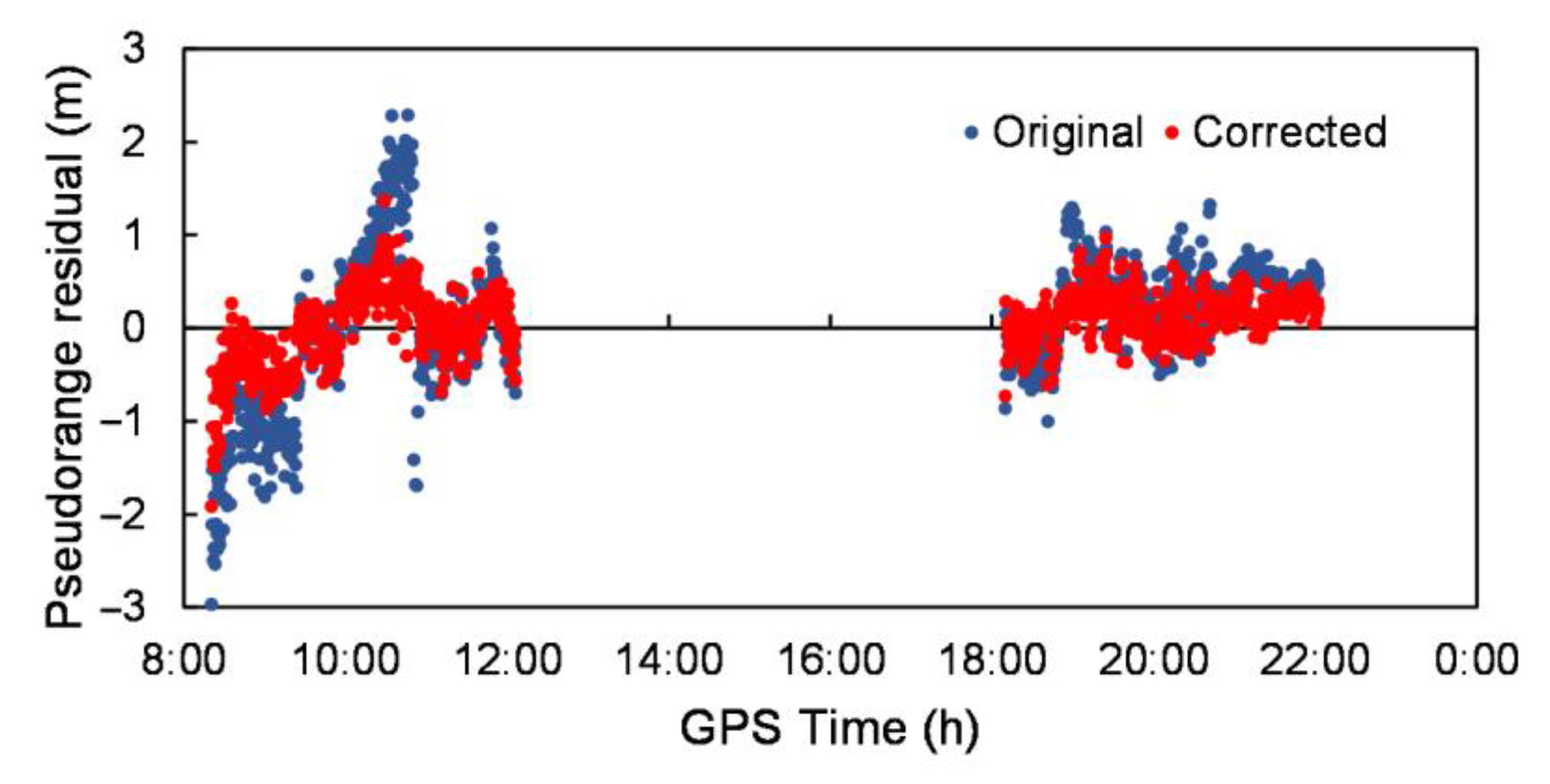
- The validation of the code pseudorange variations model is carried out by using the single-site periodical model and multi-site periodical model; after removing the low-frequency components of the code pseudorange variations, the CMC combination, the MW combination, and the pseudorange residuals of SPP also cure this deficiency, so these two models can achieve comparable correction effects.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hein, G.W. Status, perspectives and trends of satellite navigation. Satell. Navig. 2020, 1, 22. [Google Scholar] [CrossRef] [PubMed]
- Jin, S.; Wang, Q.; Dardanelli, G. A review on multi-GNSS for earth observation and emerging applications. Remote Sens. 2022, 14, 3930. [Google Scholar] [CrossRef]
- Montenbruck, O.; Schmid, R.; Mercier, F.; Steigenberger, P.; Noll, C.; Fatkuline, R.; Koguref, S.; Ganeshan, A.S. GNSS satellite geometry and attitude models. Adv. Space Res. 2015, 56, 1015–1029. [Google Scholar] [CrossRef] [Green Version]
- Zaminpardaz, S.; Teunissen, P.J.G.; Nadarajah, N. GLONASS CDMA L3 ambiguity resolution and positioning. GPS Solut. 2017, 21, 535–549. [Google Scholar] [CrossRef] [Green Version]
- Zaminpardaz, S.; Teunissen, P.J.G.; Khodabandeh, A. GLONASS–only FDMA+CDMA RTK: Performance and outlook. GPS Solut. 2021, 25, 96. [Google Scholar] [CrossRef]
- Zhang, F.; Chai, H.; Li, L.; Wang, M.; Feng, X.; Du, Z. Understanding the characteristic of GLONASS inter-frequency clock bias using both FDMA and CDMA signals. GPS Solut. 2022, 26, 63. [Google Scholar] [CrossRef]
- Beer, S.; Wanninger, L.; Hesselbarth, A. Galileo and GLONASS group delay variations. GPS Solut. 2020, 24, 23. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B. Estimation of code observation-specific biases (OSBs) for the modernized multi-frequency and multi-GNSS signals: An undifferenced and uncombined approach. J. Geod. 2021, 95, 97. [Google Scholar] [CrossRef]
- Defraigne, P.; Sleewaegen, J.-M. Code-phase clock bias and frequency offset in PPP clock solutions. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2016, 63, 986–992. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Teunissen, P.J.G.; Yuan, Y. On the short-term temporal variations of GNSS receiver differential phase biases. J. Geod. 2017, 91, 563–572. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J.G.; Yuan, Y.; Zhang, X.; Li, M. A modified carrier-to-code leveling method for retrieving ionospheric observables and detecting short-term temporal variability of receiver differential code biases. J. Geod. 2019, 93, 19–28. [Google Scholar] [CrossRef] [Green Version]
- Hauschild, A.; Montenbruck, O.; Thoelert, S.; Erker, S.; Meurer, M.; Ashjaee, J. A multi-technique approach for characterizing the SVN49 signal anomaly, part 1: Receiver tracking and IQ constellation. GPS Solut. 2012, 16, 19–28. [Google Scholar] [CrossRef] [Green Version]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef] [Green Version]
- Nadarajah, N.; Teunissen, P.J.G.; Sleewaegen, J.-M.; Montenbruck, O. The mixed-receiver BeiDou inter-satellite-type bias and its impact on RTK positioning. GPS Solut. 2015, 19, 357–368. [Google Scholar] [CrossRef]
- Ma, X.; Shen, Y. Multipath error analysis of COMPASS triple frequency observations. Positioning 2014, 5, 12–21. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; de Jong, K.; Zhao, Q.; Hu, Z.; Guo, J. Multipath analysis of code measurements for BeiDou geostationary satellites. GPS Solut. 2015, 19, 129–139. [Google Scholar] [CrossRef]
- Ning, Y.; Yuan, Y.; Chai, Y.; Huang, Y. Analysis of the bias on the Beidou GEO multipath combinations. Sensors 2016, 16, 1252. [Google Scholar] [CrossRef] [Green Version]
- Beer, S.; Wanninger, L.; Hesselbarth, A. Estimation of absolute GNSS satellite antenna group delay variations based on those of absolute receiver antenna group delays. GPS Solut. 2021, 25, 110. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Cham, Switzerland, 2017; pp. 3–22. [Google Scholar]
- Li, X.X.; Liu, G.; Li, X.; Zhou, F.; Feng, G.; Yuan, Y.; Zhang, K. Galileo PPP rapid ambiguity resolution with five-frequency observations. GPS Solut. 2019, 24, 24. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Schmid, R. The Multi-GNSS experiment (MGEX) of the international GNSS service (IGS)-achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Zhao, Q.; Wang, G.; Liu, Z.; Hu, Z.; Dai, Z.; Liu, J. Analysis of BeiDou satellite measurements with code multipath and geometry-free ionosphere-free combinations. Sensors 2016, 16, 123. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hatch, R. The synergism of GPS code and carrier measurements. In Proceedings of the 3rd International Geodetic Symposium on Satellite Doppler Positioning, Las Cruces, NM, USA, 8–12 February 1982. [Google Scholar]
- Li, X.; Li, X.X.; Jiang, Z.; Xia, C.; Shen, Z.; Wu, J. A unified model of GNSS phase/code bias calibration for PPP ambiguity resolution with GPS, BDS, Galileo and GLONASS multi-frequency observations. GPS Solut. 2022, 26, 84. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite Type | Satellite PRN |
|---|---|
| M | R01, R02, R03, R06, R07, R08, R10, R11, R13, R14, R15, R16, R17, R18, R19, R20, R23, R24 |
| M+ | R04, R05, R12, R21 |
| K | R09, R26 |
| Station | DOY 325 | DOY 326 | ||||
|---|---|---|---|---|---|---|
| Without Correction (cm) | With Correction (cm) | Reduction (%) | Without Correction (cm) | With Correction (cm) | Reduction (%) | |
| LEIJ | 20.90 | 12.02 | 42.49 | 19.72 | 11.08 | 43.81 |
| FFMJ | 20.13 | 11.26 | 44.06 | 20.16 | 10.88 | 45.95 |
| BRUX | 21.45 | 11.14 | 48.07 | 21.14 | 11.04 | 47.78 |
| CEBR | 20.68 | 12.42 | 39.94 | 20.88 | 12.24 | 41.38 |
| ANMG | 20.28 | 11.68 | 42.41 | 20.46 | 11.99 | 41.40 |
| MAL2 | 19.88 | 10.98 | 44.77 | 20.14 | 11.36 | 43.59 |
| MRC1 | 24.28 | 11.44 | 52.88 | 23.92 | 11.89 | 50.29 |
| NNOR | 22.28 | 12.48 | 43.99 | 22.87 | 12.95 | 43.38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Shen, Y.; Li, X. Mitigating Satellite-Induced Code Pseudorange Variations at GLONASS G3 Frequency Using Periodical Model. Remote Sens. 2023, 15, 431. https://doi.org/10.3390/rs15020431
Li L, Shen Y, Li X. Mitigating Satellite-Induced Code Pseudorange Variations at GLONASS G3 Frequency Using Periodical Model. Remote Sensing. 2023; 15(2):431. https://doi.org/10.3390/rs15020431
Chicago/Turabian StyleLi, Linyang, Yang Shen, and Xin Li. 2023. "Mitigating Satellite-Induced Code Pseudorange Variations at GLONASS G3 Frequency Using Periodical Model" Remote Sensing 15, no. 2: 431. https://doi.org/10.3390/rs15020431
APA StyleLi, L., Shen, Y., & Li, X. (2023). Mitigating Satellite-Induced Code Pseudorange Variations at GLONASS G3 Frequency Using Periodical Model. Remote Sensing, 15(2), 431. https://doi.org/10.3390/rs15020431