

In-Situ Radar Observation of Shallow Lunar Regolith at the Chang’E-5 Landing Site: Research Progress and Perspectives
 ,
,  , ,
, ,  and
and
Abstract
:1. Introduction
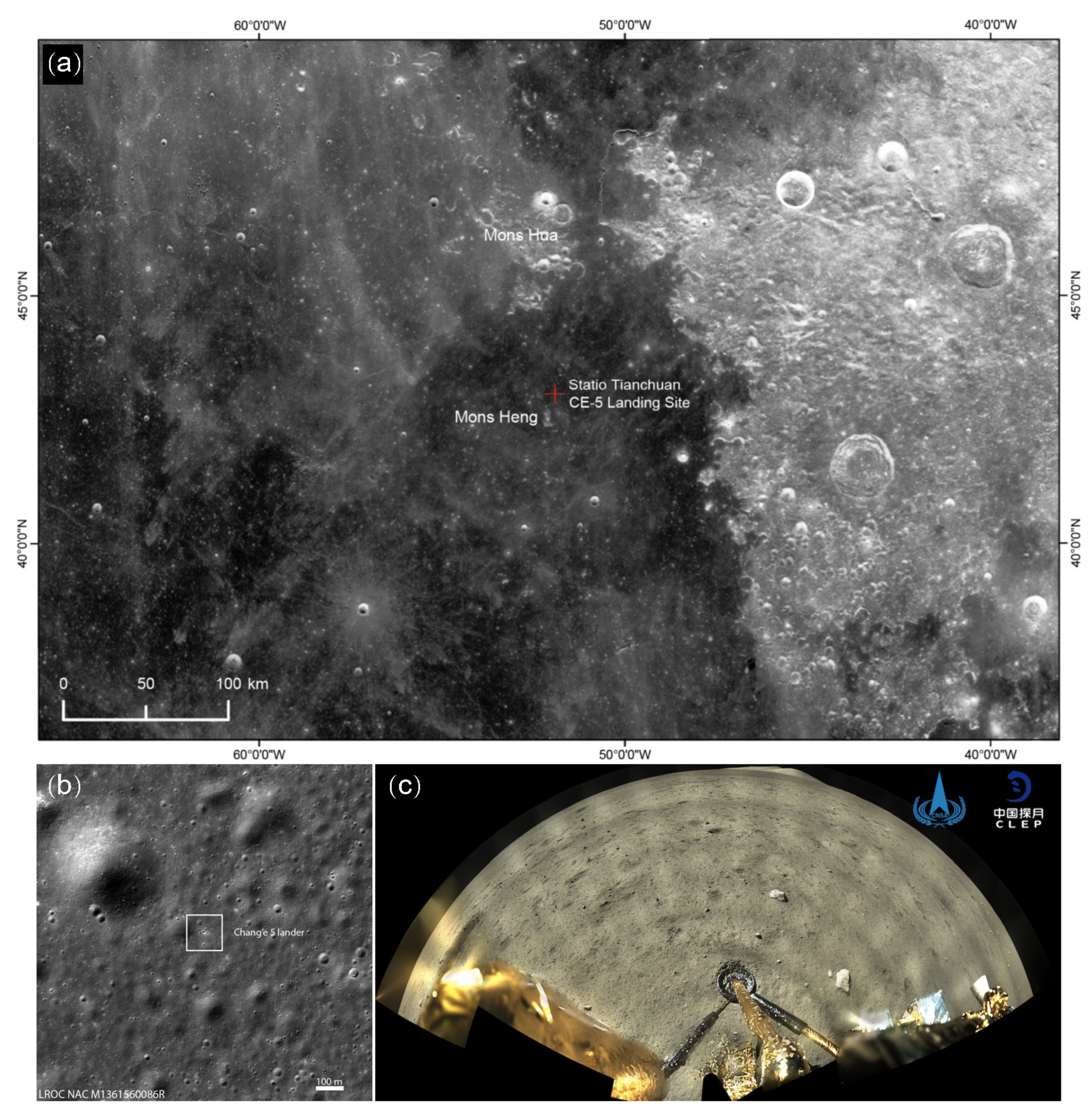
2. Geological Setting of the CE-5 Landing Zone
3. Lunar Regolith Penetrating Radar (LRPR)
3.1. Concise Description of the CE-5 Radar System
3.2. Preprocessing of Radar Data
- Sample time calibration: This procedure is conducted to rectify any irregularities in the sampling interval, ensuring uniformity. The sampling time intervals at the instrument level are not constant. Therefore, we need to access the sampling time axis data to calibrate the radar observation. The sampling time axis data represents the actual sampling times of each sampling point when the LRPR acquires a scientific dataset. This data is obtained through ground calibration experiments. The actual scientific data’s time axis data can be obtained by using the parameter “sampling start position” to look up the actual sampling time for each point within the sampling time axis data.
- Bandpass filtering: This step is employed to effectively eliminate system noise and direct current components.
- Delay correction: LRPR employs a single transmitter and a single receiver, and different channels are switched using a switching matrix, resulting in varying delays in different channels. Delay correction is performed to address this issue.
- Background removal: The signals emitted by the antenna undergo multiple couplings/reflections between the antenna and the lander, generating interference in the form of clutter that severely affects the imaging of underground targets. This step aims to remove such background noise.
3.3. Calibration or Ground Validation
3.4. Estimation of Velocity Spectrum of the Radar Image
3.5. Radar Imaging Algorithm
3.6. Possibility for Solving Cluttered Imaging
4. Radar Observation of the Lunar Regolith’s Interior Structure
4.1. Overview of Drilling and Sampling
4.2. Imaging of Shallow Surface Structure of the Lunar Regolith
5. Dielectric Properties of the Lunar Regolith at the Landing Site
5.1. Radar Inversion of Dielectric Permittivity and Loss Tangent
5.2. Laboratory Measurements of Loss Tangent and Dielectric Permittivity by Lunar Samples
6. The History of the Lunar Regolith at the Landing Zone
7. Geological Stratification and Interpretation of the CE-5 Landing Area
8. Summary and Future Prospects
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ouyang, Z.; Jiang, J.; Li, C.; Sun, H.; Zou, Y.; Liu, J.; Liu, J.; Zhao, B.; Ren, X.; Yang, J.; et al. Preliminary scientific results of Chang E-1 lunar orbiter: Based on payloads detection data in the first phase. Chin. J. Space Sci. 2008, 28, 361–369. [Google Scholar]
- Ouyang, Z.; Li, C.; Zou, Y.; Zhang, H.; Lü, C.; Liu, J.; Liu, J.; Zuo, W.; Su, Y.; Wen, W.; et al. Primary scientific results of Chang’E-1 lunar mission. Sci. China Earth Sci. 2010, 53, 1565–1581. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Ren, X.; Mou, L.; Zou, Y.; Zhang, H.; Lü, C.; Liu, J.; Zuo, W.; Su, Y.; et al. The global image of the Moon obtained by the Chang’E-1: Data processing and lunar cartography. Sci. China Earth Sci. 2010, 53, 1091–1102. [Google Scholar] [CrossRef]
- Ip, W.H.; Yan, J.; Li, C.L.; Ouyang, Z.Y. Preface: The Chang’E-3 lander and rover mission to the Moon. Res. Astron. Astrophys. 2014, 14, 1511. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Ren, X.; Zuo, W.; Tan, X.; Wen, W.; Li, H.; Mu, L.; Su, Y.; Zhang, H.; et al. The Chang’e 3 mission overview. Space Sci. Rev. 2015, 190, 85–101. [Google Scholar] [CrossRef]
- Ding, C.; Feng, J.; Zheng, L.; Dai, S.; Xing, S.; Xiao, Y.; Su, Y. A review of applications of radar-detection techniques in lunar explorations. Astron. Res. Technol. Publ. Natl. Astron. Obs. China 2015, 12, 228–242. [Google Scholar]
- Li, C.; Su, Y.; Pettinelli, E.; Xing, S.; Ding, C.; Liu, J.; Ren, X.; Lauro, S.E.; Soldovieri, F.; Zeng, X.; et al. The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 Lunar Penetrating Radar. Sci. Adv. 2020, 6, eaay6898. [Google Scholar] [CrossRef]
- Zheng, Y.; Ouyang, Z.; Li, C.; Liu, J.; Zou, Y. China’s lunar exploration program: Present and future. Planet. Space Sci. 2008, 56, 881–886. [Google Scholar] [CrossRef]
- Xu, L.; Ouyang, Z. Scientific progress in China’s lunar exploration program. Chin. J. Space Sci. 2014, 34, 525–534. [Google Scholar] [CrossRef]
- Li, C.; Wang, C.; Wei, Y.; Lin, Y. China’s present and future lunar exploration program. Science 2019, 365, 238–239. [Google Scholar] [CrossRef]
- Ding, C.; Su, Y.; Lei, Z.; Zhang, Z.; Song, M.; Liu, Y.; Wang, R.; Li, Q.; Li, C.; Huang, S. Electromagnetic Signal Attenuation Characteristics in the Lunar Regolith Observed by the Lunar Regolith Penetrating Radar (LRPR) Onboard the Chang’E-5 Lander. Remote Sens. 2022, 14, 5189. [Google Scholar] [CrossRef]
- Zhang, Z.; Su, Y.; Dai, S.; Zhou, J.; Ren, X.; Liu, J.; Li, C. Revealing regolith substructure by Chang’E-5 LRPR with optimized cable delay calibration method. Icarus 2023, 402, 115630. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, B.; Shen, S.; Lu, W.; Tang, C.; Li, S.; Su, Y.; Dai, S.; Fang, G. The Lunar Regolith Structure and Electromagnetic Properties of Chang’E-5 Landing Site. Remote Sens. 2022, 14, 4539. [Google Scholar] [CrossRef]
- Jia, B.; Fa, W.; Xie, M.; Tai, Y.; Liu, X. Regolith Properties in the Chang’E-5 Landing Region of the Moon: Results From Multi-Source Remote Sensing Observations. J. Geophys. Res. Planets 2021, 126, e2021JE006934. [Google Scholar] [CrossRef]
- Yang, M.; Zhang, G.; Zhang, W.; Peng, J.; Ruan, J.; Wang, Y.; Zhang, H.; Hong, X.; Zhang, Y.; Zha, X.; et al. Technical design and implementation of Chang’e-5 robotic sample return mission on lunar surface. Sci. China Technol. Sci. 2021, 51, 738–752. [Google Scholar]
- Zhou, C.; Jia, Y.; Liu, J.; Li, H.; Fan, Y.; Zhang, Z.; Liu, Y.; Jiang, Y.; Zhou, B.; He, Z.; et al. Scientific objectives and payloads of the lunar sample return mission—Chang’E-5. Adv. Space Res. 2022, 69, 823–836. [Google Scholar] [CrossRef]
- Zheng, Y.; Yang, M.; Deng, X.; Jin, S.; Peng, J.; Su, Y.; Gu, Z.; Chen, L.; Pang, Y.; Zhang, N. Analysis of Chang’e-5 lunar core drilling process. Chin. J. Aeronaut. 2023, 36, 292–303. [Google Scholar] [CrossRef]
- Tian, H.C.; Wang, H.; Chen, Y.; Yang, W.; Zhou, Q.; Zhang, C.; Lin, H.L.; Huang, C.; Wu, S.T.; Jia, L.H.; et al. Non-KREEP origin for Chang’e-5 basalts in the Procellarum KREEP Terrane. Nature 2021, 600, 59–63. [Google Scholar] [CrossRef]
- Hu, S.; He, H.; Ji, J.; Lin, Y.; Hui, H.; Anand, M.; Tartèse, R.; Yan, Y.; Hao, J.; Li, R.; et al. A dry lunar mantle reservoir for young mare basalts of Chang’e-5. Nature 2021, 600, 49–53. [Google Scholar] [CrossRef]
- Yao, Y.; Xiao, C.; Wang, P.; Li, C.; Zhou, Q. Instrumental neutron activation analysis of Chang’E-5 lunar regolith samples. J. Am. Chem. Soc. 2022, 144, 5478–5484. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Zhang, G.; Dong, K.; Deng, X.; Gao, X.; Yang, Y.; Xiao, Y.; Bai, X.; Liang, K.; et al. Size, morphology, and composition of lunar samples returned by Chang’E-5 mission. Sci. China Phys. Mech. Astron. 2022, 65, 229511. [Google Scholar] [CrossRef]
- Zong, K.; Wang, Z.; Li, J.; He, Q.; Li, Y.; Becker, H.; Zhang, W.; Hu, Z.; He, T.; Cao, K.; et al. Bulk compositions of the Chang’E-5 lunar soil: Insights into chemical homogeneity, exotic addition, and origin of landing site basalts. Geochim. Cosmochim. Acta 2022, 335, 284–296. [Google Scholar] [CrossRef]
- Su, Y.; Wang, R.; Deng, X.; Zhang, Z.; Zhou, J.; Xiao, Z.; Ding, C.; Li, Y.; Dai, S.; Ren, X.; et al. Hyperfine structure of regolith unveiled by Chang’E-5 lunar regolith penetrating radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5110414. [Google Scholar] [CrossRef]
- Wang, R.; Su, Y.; Ding, C.; Dai, S.; Liu, C.; Zhang, Z.; Hong, T.; Zhang, Q.; Li, C. A novel approach for permittivity estimation of lunar regolith using the lunar penetrating radar onboard Chang’E-4 rover. Remote Sens. 2021, 13, 3679. [Google Scholar] [CrossRef]
- Feng, J.; Siegler, M.A.; White, M.N. Shallow regolith structure and obstructions detected by lunar regolith penetrating radar at Chang’E-5 drilling site. Remote Sens. 2022, 14, 3378. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, T.; Jia, Y.; Song, M.; Ding, C.; Huang, S. Thermal environment of the Chang’E-5 landing site and its effect on the external temperature of the lander. Sci. Sin. Phys. Mech. Astron. 2023, 53, 239608. [Google Scholar] [CrossRef]
- Li, J.; Bai, L.; Liu, H. Numerical verification of full waveform inversion for the Chang’E-5 lunar regolith penetrating array radar. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5903710. [Google Scholar] [CrossRef]
- Li, C.; Hu, H.; Yang, M.F.; Pei, Z.Y.; Zhou, Q.; Ren, X.; Liu, B.; Liu, D.; Zeng, X.; Zhang, G.; et al. Characteristics of the lunar samples returned by the Chang’E-5 mission. Natl. Sci. Rev. 2022, 9, nwab188. [Google Scholar] [CrossRef]
- Song, M.; Zhong, Y.; Ding, C.; Liu, Y.; Huang, S.; Li, Q. Regolith mineral detection and abundance estimation based on the LMS spectral data of Chang’E-5 lander. Sci. Sin. Phys. Mech. Astron. 2023, 53, 239607. [Google Scholar] [CrossRef]
- Nie, J.; Cui, Y.; Senetakis, K.; Guo, D.; Wang, Y.; Wang, G.; Feng, P.; He, H.; Zhang, X.; Zhang, X.; et al. Predicting residual friction angle of lunar regolith based on Chang’e-5 lunar samples. Sci. Bull. 2023, 68, 730–739. [Google Scholar] [CrossRef] [PubMed]
- Zhao, R.; Shen, L.; Xiao, D.; Chang, C.; Huang, Y.; Yu, J.; Zhang, H.; Liu, M.; Zhao, S.; Yao, W.; et al. Diverse glasses revealed from Chang’E-5 lunar regolith. Natl. Sci. Rev. 2023, 10, nwad079. [Google Scholar] [CrossRef]
- Zeng, X.; Li, X.; Liu, J. Exotic clasts in Chang’e-5 regolith indicative of unexplored terrane on the Moon. Nat. Astron. 2023, 7, 152–159. [Google Scholar] [CrossRef]
- Tian, H.C.; Zhang, C.; Yang, W.; Du, J.; Chen, Y.; Xiao, Z.; Mitchell, R.N.; Hui, H.; Changela, H.G.; Zhang, T.X.; et al. Surges in volcanic activity on the Moon about two billion years ago. Nat. Commun. 2023, 14, 3734. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Y.; Su, Y.; Dai, S.; Feng, J.; Xing, S.; Ding, C.; Li, C. Ground experiments of Chang’e-5 lunar regolith penetrating radar. Adv. Space Res. 2019, 63, 3404–3419. [Google Scholar] [CrossRef]
- Li, Y.; Lu, W.; Fang, G.; Zhou, B.; Shen, S. Performance verification of lunar regolith penetrating array radar of Chang’E-5 mission. Adv. Space Res. 2019, 63, 2267–2278. [Google Scholar] [CrossRef]
- Carrier, W.D., III; Olhoeft, G.R.; Mendell, W. Physical properties of the lunar surface. In Lunar Sourcebook, a User’s Guide to the Moon; Cambridge University Press: Cambridge, UK, 1991; pp. 475–594. [Google Scholar]
- Shkuratov, Y.G.; Bondarenko, N.V. Regolith layer thickness mapping of the Moon by radar and optical data. Icarus 2001, 149, 329–338. [Google Scholar] [CrossRef]
- Fa, W.; Wieczorek, M.A. Regolith thickness over the lunar nearside: Results from Earth-based 70-cm Arecibo radar observations. Icarus 2012, 218, 771–787. [Google Scholar] [CrossRef]
- Slyuta, E. Physical and mechanical properties of the lunar soil (A review). Sol. Syst. Res. 2014, 48, 330–353. [Google Scholar] [CrossRef]
- Xiao, L.; Zhu, P.; Fang, G.; Xiao, Z.; Zou, Y.; Zhao, J.; Zhao, N.; Yuan, Y.; Qiao, L.; Zhang, X.; et al. A young multilayered terrane of the northern Mare Imbrium revealed by Chang’E-3 mission. Science 2015, 347, 1226–1229. [Google Scholar] [CrossRef]
- Feng, J.; Su, Y.; Ding, C.; Xing, S.; Dai, S.; Zou, Y. Dielectric properties estimation of the lunar regolith at CE-3 landing site using lunar penetrating radar data. Icarus 2017, 284, 424–430. [Google Scholar] [CrossRef]
- Ding, C.; Li, C.; Xiao, Z.; Su, Y.; Xing, S.; Wang, Y.; Feng, J.; Dai, S.; Xiao, Y.; Yao, M. Layering structures in the porous material beneath the Chang’e-3 landing site. Earth Space Sci. 2020, 7, e2019EA000862. [Google Scholar] [CrossRef]
- Xiao, Z.; Ding, C.; Xie, M.; Cai, Y.; Cui, J.; Zhang, K.; Wang, J. Ejecta from the Orientale basin at the Chang’E-4 landing site. Geophys. Res. Lett. 2021, 48, e2020GL090935. [Google Scholar] [CrossRef]
- Colwell, J.; Batiste, S.; Horányi, M.; Robertson, S.; Sture, S. Lunar surface: Dust dynamics and regolith mechanics. Rev. Geophys. 2007, 45, RG2006. [Google Scholar] [CrossRef]
- Peeples, W.J.; Sill, W.R.; May, T.W.; Ward, S.H.; Phillips, R.J.; Jordan, R.L.; Abbott, E.A.; Killpack, T.J. Orbital radar evidence for lunar subsurface layering in Maria Serenitatis and Crisium. J. Geophys. Res. Solid Earth 1978, 83, 3459–3468. [Google Scholar] [CrossRef]
- Honglei, L.; Chunyu, D.; Xuesen, X.; Jinhai, Z.; Yong, W.; Yangting, L. Review on the in-situ spectroscopy and radar remote sensing on the Moon. Rev. Geophys. Planet. Phys. 2021, 52, 373–390. [Google Scholar]
- Taylor, G.; Warner, R.; Keil, K. Stratigraphy and depositional history of the Apollo 17 drill core. In Proceedings of the 10th Lunar and Planetary Science Conference, Houston, TX, USA, 19–23 March 1979; Pergamon Press, Inc.: New York, NY, USA, 1979; Volume 2, pp. 1159–1184. [Google Scholar]
- Morris, R.; Lauer, H., Jr.; Gose, W. Characterization and depositional and evolutionary history of the Apollo 17 deep drill core. In Proceedings of the 10th Lunar and Planetary Science Conference, Houston, TX, USA, 19–23 March 1979; Pergamon Press, Inc.: New York, NY, USA, 1979; Volume 2, pp. 1141–1157. [Google Scholar]
- Bar-Cohen, Y.; Zacny, K. Drilling in Extreme Environments: Penetration and Sampling on Earth and Other Planets; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Renner, K. Apollo 17: Preliminary Science Report; National Aeronautics and Space Administration: Washington, DC, USA, 1973.
- Su, Y.; Fang, G.Y.; Feng, J.Q.; Xing, S.G.; Ji, Y.C.; Zhou, B.; Gao, Y.Z.; Li, H.; Dai, S.; Xiao, Y.; et al. Data processing and initial results of Chang’e-3 lunar penetrating radar. Res. Astron. Astrophys. 2014, 14, 1623. [Google Scholar] [CrossRef]
- Lai, J.; Xu, Y.; Zhang, X.; Xiao, L.; Yan, Q.; Meng, X.; Zhou, B.; Dong, Z.; Zhao, D. Comparison of dielectric properties and structure of lunar regolith at Chang’e-3 and Chang’e-4 landing sites revealed by ground-penetrating radar. Geophys. Res. Lett. 2019, 46, 12783–12793. [Google Scholar] [CrossRef]
- Ding, C.; Xiao, Z.; Su, Y.; Zhao, J.; Cui, J. Compositional variations along the route of Chang’e-3 Yutu rover revealed by the lunar penetrating radar. Prog. Earth Planet. Sci. 2020, 7, 32. [Google Scholar] [CrossRef]
- Fang, G.Y.; Zhou, B.; Ji, Y.C.; Zhang, Q.Y.; Shen, S.X.; Li, Y.X.; Guan, H.F.; Tang, C.J.; Gao, Y.Z.; Lu, W.; et al. Lunar Penetrating Radar onboard the Chang’e-3 mission. Res. Astron. Astrophys. 2014, 14, 1607. [Google Scholar] [CrossRef]
- Shen, S.; Zhou, B.; Li, Y.; Lu, W.; Liu, Q.; Tang, C.; Fang, G.; Wang, L. The design of payload lunar regolith penetrating radar on chang’e-5 lander. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 4–16. [Google Scholar] [CrossRef]
- Qian, Y.; Xiao, L.; Head, J.W.; van der Bogert, C.H.; Hiesinger, H.; Wilson, L. Young lunar mare basalts in the Chang’e-5 sample return region, northern Oceanus Procellarum. Earth Planet. Sci. Lett. 2021, 555, 116702. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Di, K.; Chen, M.; Duan, J.; Kong, J.; Xie, J.; Liu, Z.; Wan, W.; Rong, Z.; et al. Localization of the Chang’e-5 lander using radio-tracking and image-based methods. Remote Sens. 2021, 13, 590. [Google Scholar] [CrossRef]
- Hiesinger, H.; Head, J., III; Wolf, U.; Jaumann, R.; Neukum, G. Ages and stratigraphy of mare basalts in oceanus procellarum, mare nubium, mare cognitum, and mare insularum. J. Geophys. Res. Planets 2003, 108, E7. [Google Scholar] [CrossRef]
- Liu, J.; Zeng, X.; Li, C.; Ren, X.; Yan, W.; Tan, X.; Zhang, X.; Chen, W.; Zuo, W.; Liu, Y.; et al. Landing site selection and overview of China’s lunar landing missions. Space Sci. Rev. 2021, 217, 1–25. [Google Scholar] [CrossRef]
- Wu, B.; Huang, J.; Li, Y.; Wang, Y.; Peng, J. Rock abundance and crater density in the candidate Chang’E-5 landing region on the Moon. J. Geophys. Res. Planets 2018, 123, 3256–3272. [Google Scholar] [CrossRef]
- Morota, T.; Haruyama, J.; Ohtake, M.; Matsunaga, T.; Honda, C.; Yokota, Y.; Kimura, J.; Ogawa, Y.; Hirata, N.; Demura, H.; et al. Timing and characteristics of the latest mare eruption on the Moon. Earth Planet. Sci. Lett. 2011, 302, 255–266. [Google Scholar] [CrossRef]
- Boyce, J.M. Ages of flow units in the lunar nearside maria based on Lunar Orbiter IV photographs. In Proceedings of the 7th Lunar Science Conference, Houston, TX, USA, 15–19 March 1976; Pergamon Press, Inc.: New York, NY, USA, 1976; Volume 3, pp. 2717–2728. [Google Scholar]
- Jia, M.; Yue, Z.; Di, K.; Liu, B.; Liu, J.; Michael, G. A catalogue of impact craters larger than 200 m and surface age analysis in the Chang’e-5 landing area. Earth Planet. Sci. Lett. 2020, 541, 116272. [Google Scholar] [CrossRef]
- Qian, Y.; Xiao, L.; Zhao, S.; Zhao, J.; Huang, J.; Flahaut, J.; Martinot, M.; Head, J.; Hiesinger, H.; Wang, G. Geology and scientific significance of the Rümker region in northern Oceanus Procellarum: China’s Chang’E-5 landing region. J. Geophys. Res. Planets 2018, 123, 1407–1430. [Google Scholar] [CrossRef]
- Che, X.; Nemchin, A.; Liu, D.; Long, T.; Wang, C.; Norman, M.D.; Joy, K.H.; Tartese, R.; Head, J.; Jolliff, B.; et al. Age and composition of young basalts on the Moon, measured from samples returned by Chang’e-5. Science 2021, 374, 887–890. [Google Scholar] [CrossRef]
- Li, Q.L.; Zhou, Q.; Liu, Y.; Xiao, Z.; Lin, Y.; Li, J.H.; Ma, H.X.; Tang, G.Q.; Guo, S.; Tang, X.; et al. Two-billion-year-old volcanism on the Moon from Chang’e-5 basalts. Nature 2021, 600, 54–58. [Google Scholar] [CrossRef]
- Zhao, J.; Xiao, L.; Qiao, L.; Glotch, T.D.; Huang, Q. The Mons Rümker volcanic complex of the Moon: A candidate landing site for the Chang’E-5 mission. J. Geophys. Res. Planets 2017, 122, 1419–1442. [Google Scholar] [CrossRef]
- Hurwitz, D.M.; Head, J.W.; Hiesinger, H. Lunar sinuous rilles: Distribution, characteristics, and implications for their origin. Planet. Space Sci. 2013, 79, 1–38. [Google Scholar] [CrossRef]
- Qiao, L.; Chen, J.; Xu, L.; Wan, S.; Cao, H.; Li, B.; Ling, Z. Geology of the Chang’e-5 landing site: Constraints on the sources of samples returned from a young nearside mare. Icarus 2021, 364, 114480. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, W.; Hu, S.; Lin, Y.; Fang, G.; Li, C.; Peng, W.; Zhu, S.; He, Z.; Zhou, B.; et al. Volcanic history of the Imbrium basin: A close-up view from the lunar rover Yutu. Proc. Natl. Acad. Sci. USA 2015, 112, 5342–5347. [Google Scholar] [CrossRef]
- Ling, Z.; Jolliff, B.L.; Wang, A.; Li, C.; Liu, J.; Zhang, J.; Li, B.; Sun, L.; Chen, J.; Xiao, L.; et al. Correlated compositional and mineralogical investigations at the Chang’ e-3 landing site. Nat. Commun. 2015, 6, 8880. [Google Scholar] [CrossRef]
- Tronca, G.; Tsalicoalou, I.; Lehner, S.; Catanzariti, G. Comparison of pulsed and stepped frequency continuous wave (SFCW) GPR systems. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Leckebusch, J. Comparison of a stepped-frequency continuous wave and a pulsed GPR system. Archaeol. Prospect. 2011, 18, 15–25. [Google Scholar] [CrossRef]
- Li, Y.; Fang, G.; Ji, Y.; Zhou, B.; Shen, S. Data processing and some results of Chang’E-5 LRPR ground verification. In Proceedings of the 2016 16th International Conference on Ground Penetrating Radar (GPR), Hong Kong, China, 13–16 June 2016; pp. 1–4. [Google Scholar]
- Li, Y.; Lu, W.; Fang, G.; Shen, S. The imaging method and verification experiment of Chang’E-5 lunar regolith penetrating array radar. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1006–1010. [Google Scholar] [CrossRef]
- Li, C.; Zuo, W.; Wen, W.; Zeng, X.; Gao, X.; Liu, Y.; Fu, Q.; Zhang, Z.; Su, Y.; Ren, X.; et al. Overview of the Chang’e-4 mission: Opening the frontier of scientific exploration of the lunar far side. Space Sci. Rev. 2021, 217, 1–32. [Google Scholar] [CrossRef]
- Feng, J.; Siegler, M.A.; White, M.N. Dielectric properties and stratigraphy of regolith in the lunar South Pole-Aitken basin: Observations from the Lunar Penetrating Radar. Astron. Astrophys. 2022, 661, A47. [Google Scholar] [CrossRef]
- Zhang, H.B.; Zheng, L.; Su, Y.; Fang, G.Y.; Zhou, B.; Feng, J.Q.; Xing, S.G.; Dai, S.; Li, J.D.; Ji, Y.C.; et al. Performance evaluation of lunar penetrating radar onboard the rover of CE-3 probe based on results from ground experiments. Res. Astron. Astrophys. 2014, 14, 1633. [Google Scholar] [CrossRef]
- Feng, J.; Su, Y.; Li, C.; Dai, S.; Xing, S.; Xiao, Y. An imaging method for Chang’e- 5 Lunar Regolith Penetrating Radar. Planet. Space Sci. 2019, 167, 9–16. [Google Scholar] [CrossRef]
- Liu, H.; Takahashi, K.; Sato, M. Measurement of dielectric permittivity and thickness of snow and ice on a brackish lagoon using GPR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 7, 820–827. [Google Scholar] [CrossRef]
- Dix, C.H. Seismic velocities from surface measurements. Geophysics 1955, 20, 68–86. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, C.; Jia, Y.; Cui, G.; Guo, S. Non-line-of-sight target detection based on dual-view observation with single-channel uwb radar. Remote Sens. 2022, 14, 4532. [Google Scholar] [CrossRef]
- Liang, J.; Tao, L.; Zhang, W.; Tang, J.; Pang, Y.; Jiang, S. Analysis of the lunar regolith sample obstruction in the Chang’E-5 drill and its improvement. Adv. Space Res. 2022, 69, 2248–2258. [Google Scholar] [CrossRef]
- Dong, Z.; Fang, G.; Ji, Y.; Gao, Y.; Wu, C.; Zhang, X. Parameters and structure of lunar regolith in Chang’E-3 landing area from lunar penetrating radar (LPR) data. Icarus 2017, 282, 40–46. [Google Scholar] [CrossRef]
- Ding, C.; Xiao, Z.; Wu, B.; Li, Z.; Su, Y.; Zhou, B.; Liu, K.; Cui, J. Rock Fragments in Shallow Lunar Regolith: Constraints by the Lunar Penetrating Radar Onboard the Chang’E-4 Mission. J. Geophys. Res. Planets 2021, 126, e2021JE006917. [Google Scholar] [CrossRef]
- Herve, Y.; Ciarletti, V.; Le Gall, A.; Corbel, C.; Hassen-Khodja, R.; Benedix, W.; Plettemeier, D.; Humeau, O.; Vieau, A.J.; Lustrement, B.; et al. The WISDOM radar on board the ExoMars 2022 Rover: Characterization and calibration of the flight model. Planet. Space Sci. 2020, 189, 104939. [Google Scholar] [CrossRef]
- Long, D.; Ulaby, F. Microwave Radar and Radiometric Remote Sensing; Artech: Norwood, MA, USA, 2015. [Google Scholar]
- Grimm, R.E.; Heggy, E.; Clifford, S.; Dinwiddie, C.; McGinnis, R.; Farrell, D. Absorption and scattering in ground-penetrating radar: Analysis of the Bishop Tuff. J. Geophys. Res. Planets 2006, 111, E6. [Google Scholar] [CrossRef]
- ASTM D5568-08; Standard Test Method for Measuring Relative Complex Permittivity and Relative Magnetic Permeability of Solid Materials at Microwave Frequencies. ASTM International: West Conshohocken, PA, USA, 2022; Volume 10.
- Baker-Jarvis, J.; Janezic, M.D.; Grosvenor, J.H., Jr.; Geyer, R.G. Transmission/reflection and short-circuit line methods for measuring permittivity and permeability. NASA STI/Recon. Tech. Rep. N 1992, 93, 12084. [Google Scholar]
- Melosh, H.J. Impact Cratering: A Geologic Process; Oxford University Press: New York, NY, USA; Clarendon Press: Oxford, UK, 1989. [Google Scholar]
- Sharpton, V.L. Outcrops on lunar crater rims: Implications for rim construction mechanisms, ejecta volumes and excavation depths. J. Geophys. Res. Planets 2014, 119, 154–168. [Google Scholar] [CrossRef]
- Jia, B.; Fa, W.; Zhang, M.; Di, K.; Xie, M.; Tai, Y.; Li, Y. On the provenance of the Chang’E-5 lunar samples. Earth Planet. Sci. Lett. 2022, 596, 117791. [Google Scholar] [CrossRef]
- Qian, Y.; Xiao, L.; Head, J.W.; Wöhler, C.; Bugiolacchi, R.; Wilhelm, T.; Althoff, S.; Ye, B.; He, Q.; Yuan, Y.; et al. Copernican-aged (<200 Ma) impact ejecta at the Chang’e-5 landing site: Statistical evidence from crater morphology, morphometry, and degradation models. Geophys. Res. Lett. 2021, 48, e2021GL095341. [Google Scholar]
- Qian, Y.; Xiao, L.; Wang, Q.; Head, J.W.; Yang, R.; Kang, Y.; van der Bogert, C.H.; Hiesinger, H.; Lai, X.; Wang, G.; et al. China’s Chang’e-5 landing site: Geology, stratigraphy, and provenance of materials. Earth Planet. Sci. Lett. 2021, 561, 116855. [Google Scholar] [CrossRef]
- Basilevskii, A. On the evolution rate of small lunar craters. In Proceedings of the 7th Lunar Science Conference, Houston, TX, USA, 15–19 March 1976; Pergamon Press, Inc.: New York, NY, USA, 1976; Volume 1, pp. 1005–1020. [Google Scholar]
- Zou, Y.; Liu, Y.; Jia, Y. Overview of China’s Upcoming Chang’E Series and the Scientific Objectives and Payloads for Chang’E 7 Mission. In Proceedings of the 51st Annual Lunar and Planetary Science Conference, Woodlands, TX, USA, 16–20 March 2020; Volume 2326, p. 1755. [Google Scholar]
- Jia, Y.; Zhang, Z.; Qin, L.; Ma, T.; Lv, B.; Fu, Z.; Xue, C.; Zou, Y. Research of Lunar Water-Ice and Exploration for China’s Future Lunar Water-Ice Exploration. Space Sci. Technol. 2023, 3, 0026. [Google Scholar] [CrossRef]
- Ding, C.; Cai, Y.; Xiao, Z.; Su, Y. A rocky hill on the continuous ejecta of Ziwei crater revealed by the Chang’e-3 mission. Earth Planet. Phys. 2020, 4, 105–110. [Google Scholar] [CrossRef]
- Ding, C.; Xiao, Z.; Su, Y. A potential subsurface cavity in the continuous ejecta deposits of the Ziwei crater discovered by the Chang’E-3 mission. Earth Planets Space 2021, 73, 53. [Google Scholar] [CrossRef]
- Zhou, H.; Feng, X.; Ding, C.; Dong, Z.; Liu, C.; Liang, W. Heterogeneous Weathering Process of Lunar Regolith Revealed by Polarimetric Attributes Analysis of Chang’E-4 Lunar Penetrating Radar Data Acquired During the Yutu-2 Turnings. Geophys. Res. Lett. 2022, 49, e2022GL099207. [Google Scholar] [CrossRef]
- Lin, H.; Li, S.; Xu, R.; Liu, Y.; Wu, X.; Yang, W.; Wei, Y.; Lin, Y.; He, Z.; Hui, H.; et al. In situ detection of water on the Moon by the Chang’E-5 lander. Sci. Adv. 2022, 8, eabl9174. [Google Scholar] [CrossRef]
- Liu, J.; Liu, B.; Ren, X.; Li, C.; Shu, R.; Guo, L.; Yu, S.; Zhou, Q.; Liu, D.; Zeng, X.; et al. Evidence of water on the lunar surface from Chang’E-5 in-situ spectra and returned samples. Nat. Commun. 2022, 13, 3119. [Google Scholar] [CrossRef]
- Xing, S.G.; Su, Y.; Feng, J.Q.; Dai, S.; Xiao, Y.; Ding, C.Y.; Li, C.L. The penetrating depth analysis of Lunar Penetrating Radar onboard Chang’e-3 rover. Res. Astron. Astrophys. 2017, 17, 046. [Google Scholar] [CrossRef]
- Ding, C.; Xiao, Z.; Wu, B.; Li, Y.; Prieur, N.C.; Cai, Y.; Su, Y.; Cui, J. Fragments delivered by secondary craters at the Chang’E-4 landing site. Geophys. Res. Lett. 2020, 47, e2020GL087361. [Google Scholar] [CrossRef]
- Ding, C.; Li, J.; Hu, R. Moon-based Ground Penetrating Radar Observation of the Latest Volcanic Activity at the Chang’E-4 Landing Site. IEEE Trans. Geosci. Remote. Sens. 2023, 61, 4600410. [Google Scholar] [CrossRef]
- Qiu, X.; Ding, C. Radar Observation of the Lava Tubes on the Moon and Mars. Remote Sens. 2023, 15, 2850. [Google Scholar] [CrossRef]
- Ciarletti, V.; Clifford, S.; Plettemeier, D.; Le Gall, A.; Hervé, Y.; Dorizon, S.; Quantin-Nataf, C.; Benedix, W.S.; Schwenzer, S.; Pettinelli, E.; et al. The WISDOM radar: Unveiling the subsurface beneath the ExoMars Rover and identifying the best locations for drilling. Astrobiology 2017, 17, 565–584. [Google Scholar] [CrossRef]
- Hamran, S.E.; Paige, D.A.; Allwood, A.; Amundsen, H.E.; Berger, T.; Brovoll, S.; Carter, L.; Casademont, T.M.; Damsgård, L.; Dypvik, H.; et al. Ground penetrating radar observations of subsurface structures in the floor of Jezero crater, Mars. Sci. Adv. 2022, 8, eabp8564. [Google Scholar] [CrossRef]
- Chen, R.; Zhang, L.; Xu, Y.; Liu, R.; Bugiolacchi, R.; Zhang, X.; Chen, L.; Zeng, Z.; Liu, C. Martian soil as revealed by ground-penetrating radar at the Tianwen-1 landing site. Geology 2023, 51, 315–319. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar | LPR | LRPR | |
|---|---|---|---|
| Channel | CH1 | CH2 | - |
| Center frequency | 60 MHz | 500 MHz | 2000 MHz |
| Working bandwidth | 40–80 MHz | 250–750 MHz | 1–3 Ghz |
| Detection depth | ≥100 m | ≥30 m | ≥2 m |
| Vertical resolution | ∼1 m | ≤30 cm | ∼5 cm |
| No. | Crater | Longitude (°) | Latitude (°) | Diameter (m) | Contribution (cm) |
|---|---|---|---|---|---|
| 1 | IC-396 | −51.932 | 43.066 | 419 | 404.6 |
| C1 | −51.936 | 43.062 | 408.5 | 30.0 | |
| 2 | IC-265 | −51.92 | 43.059 | 98 | 312.7 |
| C2 | −51.922 | 43.056 | 104.6 | 12.0 | |
| 3 | IC-266 | −51.917 | 43.054 | 72 | 45.6 |
| C3 | −51.907 | 43.070 | 225.4 | 1.9 | |
| 4 | IC-259 | −51.916 | 43.059 | 11 | 33.9 |
| C4 | −51.916 | 43.073 | 194.3 | 1.0 | |
| 5 | IC-261 | −51.915 | 43.058 | 9 | 23.5 |
| C5 | −51.911 | 43.062 | 105.9 | 0.9 | |
| 6 | IC-320 | −51.909 | 43.064 | 104 | 19.6 |
| C6 | −51.917 | 43.047 | 114.9 | 0.8 | |
| 7 | IC-406 | −51.906 | 43.072 | 187 | 17 |
| C7 | −51.909 | 43.047 | 124.8 | 0.6 | |
| 8 | IC-400 | −51.915 | 43.049 | 111 | 16.3 |
| C8 | −51.911 | 43.067 | 127.6 | 0.4 | |
| 9 | IC-268 | −51.914 | 43.059 | 25 | 15.9 |
| C9 | −51.944 | 43.035 | 225.6 | 0.4 | |
| 10 | IC-263 | −51.917 | 43.059 | 20 | 14.1 |
| C10 | −51.914 | 43.06 | 61.0 | 0.4 | |
| 11 | IC-440 | −51.908 | 43.049 | 121 | 12.1 |
| C11 | −51.927 | 43.048 | 100.9 | 0.3 | |
| 12 | IC-262 | −51.917 | 43.058 | 10 | 10.9 |
| C12 | −51.945 | 43.070 | 168.3 | 0.2 | |
| Large crater (>17 km): | |||||
| Harpalus | −43.490 | 52.730 | 39,770 | 10.2 | |
| Copernicus | −20.060 | 9.640 | 94,300 | 7.6 | |
| Aristarchus | −47.490 | 23.740 | 40,140 | 2.7 | |
| Harding | −71.680 | 43.540 | 23,040 | 0.9 | |
| Kepler | −38.000 | 8.110 | 30,120 | 0.2 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, F.; Ding, C.; Feng, J.; Su, Y.; Sharma, R.; Giannakis, I. In-Situ Radar Observation of Shallow Lunar Regolith at the Chang’E-5 Landing Site: Research Progress and Perspectives. Remote Sens. 2023, 15, 5173. https://doi.org/10.3390/rs15215173
Fang F, Ding C, Feng J, Su Y, Sharma R, Giannakis I. In-Situ Radar Observation of Shallow Lunar Regolith at the Chang’E-5 Landing Site: Research Progress and Perspectives. Remote Sensing. 2023; 15(21):5173. https://doi.org/10.3390/rs15215173
Chicago/Turabian StyleFang, Feiyang, Chunyu Ding, Jianqing Feng, Yan Su, Ravi Sharma, and Iraklis Giannakis. 2023. "In-Situ Radar Observation of Shallow Lunar Regolith at the Chang’E-5 Landing Site: Research Progress and Perspectives" Remote Sensing 15, no. 21: 5173. https://doi.org/10.3390/rs15215173
APA StyleFang, F., Ding, C., Feng, J., Su, Y., Sharma, R., & Giannakis, I. (2023). In-Situ Radar Observation of Shallow Lunar Regolith at the Chang’E-5 Landing Site: Research Progress and Perspectives. Remote Sensing, 15(21), 5173. https://doi.org/10.3390/rs15215173